洗衣机液位检测与控制 全自动洗衣机用两种液位传感器综合测试系统第六图书馆介绍了综合测试系统用于检测全自动洗衣机用液位开关及模糊洗衣机用液位传感器,用一台检测仪器代替原有的两套检测设备,可以满足用户生产线上对传感器质量全检的要求,且准确度高,操作简便,性能可靠。介绍了综合测试系统用于检测全自动洗衣机用液位开关及模糊洗衣机用液位传感器,用一台检测仪器代替原有的两套检测设备,可以满足用户生产线上对传感器质量全检的要求,且准确度高,操作简便,性能可靠。 全自动洗衣机中一般采用的液位开关就是压力式水位开关,它装在洗涤缸的上部,它有一根下端开口的气管通到缸底,进水时管里的空气被封闭在里面出不来,就形成比外界稍高的压力。水位越高压力越高,这样根据压力就可间接测知水位。而压力的测量仍然用弹性元件,靠元件的变形带动触点完成通断动作。这种测液位的方法叫做“静压法”,在工业中用的不少。 在水处理中,液位控制往往关系到整个工艺的安全性、经济性和可行性。 在一个水处理的工艺流程中,一般都有原水,中间水箱,产水箱,反洗水箱,甚至废液箱等。体积有大有小,一般地,产水箱、原水箱等都会比较大,尤其在大型的生产线,这时在水箱中往往需要使用多个液位开关控制多个液位。每个液位对应不同的动作,常见的有泵的启停,产水的启停等。而有些水箱虽然很大,但是并不一定需要多个液位开关。 例如,在一个RO纯水生产线上,使用RO浓水作为反洗水储存在反洗水箱内。在反洗水箱中,液位开关只有一个,既低液位控制开关,用于检测反洗时水箱中的水量,而不用检测水箱是否满溢。因为RO生产纯水不停,浓水就不可以停止排放。而对于产品水箱,则需要设置低液位和高液位控制开关。高液位开关用于检测水箱是否装满,是则停止产水;低液位开关用于监测在用水时,产品水箱内产水是否足够,不足则需停止产水外送。 对于一些需要更精确控制液位的场合,还可以设置多个中液位控制开关,一般是在高低液位控制开关之间等距离分布设置。 液位开关全自动洗衣机液位开关是用来控制液位的开关,对我们来说,最熟悉的应用莫过于其在全自动洗衣机中的应用。小型液位开关利用介质具有一定的导电性原理判别液体是否与探针接触,当液体与探针接触时,液位开关的输入阻抗变小;利用此原理制成的电导式液位开关,可应用于食品饮料、水处理、酸碱盐溶液等行业的液位检测以及管道内的液位检测。 液位自动控制。该液位自动控制器电路由电源电路、液位检测电路和控制执行电路组成,如图所示。当储液池内液位达到低液位电极L时,低液位电极L 通过液体与主电极M相接,整流电路有直流电压输出。当储液池内液位到达高液位电极H时,高液位电极H通过液体与主电极贩接通,使V导通,IC的2脚
小车循迹原理 2009-07-11 12:40 1.小车控制及驱动单元的选择 此部分是整个小车的大脑,是整个小车运行的核心部件,起着控制小车所有运行状态的作用。通常选用单片机作为小车的核心控制单元,本文以台湾凌阳公司的SPCE061A单片机为例予以介绍。SPCE061是一款拥有2K RAM、32KFlash、32 个I/O 口,并集成了AD/DA功能强大的16位微处理器,它还拥有丰富的语音处理功能,为小车的功能扩展提供了相当大的空间。只要按照该单片机的要求对其编制程序就可以实现很多不同的功能。 小车驱动电机一般利用现成的玩具小车上的配套直流电机。考虑到小车必须能够前进、倒退、停止,并能灵活转向,在左右两轮各装一个电机分别进行驱动。当左轮电机转速高于右轮电机转速时小车向右转,反之则向左转。为了能控制车轮的转速,可以采取PWM调速法,即由单片机的IOB8、IOB9输出一系列频率固定的方波,再通过功率放大来驱动电机,在单片机中编程改变输出方波的占空比就可以改变加到电机上的平均电压,从而可以改变电机的转速。左右轮两个电机转速的配合就可以实现小车的前进、倒退、转弯等功能。 2.小车循迹的原理 这里的循迹是指小车在白色地板上循黑线行走,通常采取的方法是红外探测法。 红外探测法,即利用红外线在不同颜色的物体表面具有不同的反射性质的特点,在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色纸质地板时发生漫反射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,小车上的接收管接收不到红外光。单片机就是否收到反射回来的红外光为依据来确定黑线的位置和小车的行走路线。红外探测器探测距离有限,一般最大不应超过15cm。对于发射和接收红外线的红外探头,可以自己制作或直接采用集成式红外探头。 (1)自制红外探头电路如图1所示,红外光的发送接收选用型号为ST168的对管。当小车在白色地面行驶时,装在车下的红外发射管发射红外线信号,经白色反射后,被接收管接收,一旦接收管接收到信号,那么图中光敏三极管将导通,比较器输出为低电平;当小车行驶到黑色引导线时,红外线信号被黑色吸收后,光敏三极管截止,比较器输出高电平,从而实现了通过红外线检测信号的功能。将检测到的信号送到单片机I/O口,当I/O口检测到的信号为高电平时,表明红外光被地上的黑色引导线吸收了,表明小车处在黑色的引导线上;同理,当I/O口检测到的信号为低电平时,表明小车行驶在白色地面上。此种方法简单,价格便宜,灵敏度可调,但是容易受到周围环境的影响,特别是在图1较强的日光灯下,对检测到的信号有一定的影响。 (2)集成式红外探头可以采用型号为E3F-DS10C4集成断续式光电开关探测器,它具有简单、可靠的工作性能,只要调节探头上的一个旋钮就可以控制探头的灵敏度。该探头输出端只有三根线(电源线、地线、信号线),只要将信号线接在单片机的I/O 口,然后不停地对该I/O口进行扫描检测,当其为高电平时则检测到白纸,当为低电平时则检测到黑线。此种探头还能有效地防止普通光源(如日光灯等)的干扰。其缺点则是体积比较大,占用了小车有限的空间。 3.红外探头的安装 在小车具体的循迹行走过程中,为了能精确测定黑线位置并确定小车行走的方向,需要同时在底盘装设4个红外探测头,进行两级方向纠正控制,提高其循迹的可靠性。这4个红外探头的具体位置如图2所示。图中循迹传感器共安装4个,全部在一条直线上。其中InfraredMR与InfraredML 为第一级方向控制传感器,InfraredSR 与InfraredSL 为第二级方向控制传感器。小车行走时,始终保持黑线(如图2 中所示的行走轨迹黑线)在InfraredMR和InfraredML这两个第一级传感器之间,当小车偏离黑线时,第一级探测器一旦探测到有黑线,单片机就会按照预先编定的程序发送指令给小车的控制系统,控制系统再对小车路径予以纠正。若小车回到了轨道上,即4个探测器都只检测到白纸,则小车会继续行走;若小车由于惯性过大依旧偏离轨道,越出了第一级两个探测器的探测范围,这时第二级动作,再次对小车的运动进行纠正,使之回到正确轨道上去。可以看出,第二级方向探测器实际是第一级的后备保护,从而提高了小车循迹的可靠性。 4.软件控制 其程序控制框图如图3。小车进入循迹模式后,即开始不停地扫描与探测器连接的单片机I/O口,一旦检测到某个I/O口
目的: 本毕业设计是红外蔽障小车的设计,通过设计使学生系统的熟悉和掌握单片机控制系统设计方面的内容体系、开发流程和程序设计,培养学生具有综合运用所学的理论知识去开拓创新及解决实际问题的能力。培养学生掌握设计题的思想和方法,树立严肃认真的工作作风、培养学生调查研究、查阅技术文献、资料、手册以及编写技术文献的能力。同时是为了掌握电路设计的方法和技巧。如何将学习到的理论知识运用到实际当中去,怎样能够活学活用,深入的了解电子元器件的使用方法,了解各种元器件的基本用途和方法,能够灵活敏捷的判断电路中出现的故障,学会独立设计电路,积累更多的设计经验,加强焊接能力和技巧,完成基本的要求。并能完美的完成这次实训。 目录 一、任务书...............................P1 二、引言..............................P2 二、要求与发挥...........................P4 三、设计摘要.............................P6 四、模块方案比较.......................P7 1.避障模块 2.驱动模块
3.控制模块 五、程序设计.........................P9 1.程序流程图 2.程序编写 六、工作原理.........................P13 七、结论............................P13 八、参考文献........................P14 九、毕业设计(论文)成绩评定表.....P15 任务: 利用单片机、红外实现避障,要求具有下述功能: 1.小车前进可以避开(前、左、右)20cm的障碍物; 2.实现下车前进时,不碰障碍物; 3.具有声音播报功能。 引言 随着微电子技术的不断发展,微处理器芯片的集成程度越来越高,单片机已可以在一块芯片上同时集成CPU、存储器、定时器、并行和串行接口、看门狗、前置放大器、A/D转换器、D/A转换器等多种电路,这就很容易将计算机技术与测量控制技术结合,组成智能化测量控制系统。这种技术促使机器人技术也有了突飞猛进的发展,目前人
北京工业大学 课程设计说明书 题目:全自动洗衣机控制设计 学院:电子信息与控制工程学院 专业:自动化 学号: 姓名:指导教师:张会清刘红云 成绩: 年月
目录 一.课程设计题目………………………………………——全自动洗衣机控制的设计及组态……………………二.课程设计目的………………………………………——天工组态软件调试与设计……………………………三.课程设计任务……………………………………… 四、课程设计地点及设备……………………………… 五、课程设计整体方案………………………………… 六、系统设计…………………………………………… (一)硬件接线、控制程序设计与调试……………… (二)上位机组态软件设计………………………………… (三)下位机设计与调试…………………………………… .控制要求…………………………………………… 地址表……………………………………………… 接线图……………………………………………… .程序流程图…………………………………………… .梯形图………………………………………………… .设计说明………………………………………………… .调试过程………………………………………………… 七、总结及感想…………………………………………… 八、参考资料………………………………………………
一.课程设计题目——全自动洗衣机控制的设计及组态现在,全自动洗衣机已经进入了千家万户之中,极大的方便了人们的日常生活,提高了人们的生活质量,使人们从那繁重的体力劳动中解脱出来。所谓全自动洗衣机,就是将洗衣的全过程(泡浸洗涤漂洗脱水)预先设定好个程序,洗衣时选择其中一个程序,打开水龙头和启动洗衣机开关后洗衣的全过程就会自动完成,洗衣完成时由扬声器发出响声。本文是基于三菱系列的全自动洗衣机梯形图系统的设计,设计完善的全自动洗衣机控制系统,以满足控制要求,实现洗衣自动化的控制。 二、课程设计目的: 在先修课程《现代电气控制技术》中可编程控制器部分学习与实验的基础上,通过松下系列对全自动洗衣机洗涤过程进行控制的编程设计与调试,进一步熟悉并掌握的工作原理,了解控制对象的工艺流程和技术要求, 运用所学知识进行系统设计,初步掌握控制系统设计的基本方法,培养灵活运用专业知识解决工程技术问题的能力。通过使用天工组态软件,掌握组态设计的方法及调试方面的知识。 三.课程设计任务: .用实现全自动洗衣机运行控制,完成框图及梯形图控制程序的编制,并画出硬件接线图,进行软硬件的联调,并用组态软件进行监控。 .具体动作过程要求如下: ()按下启动按扭及水位选择开关,开始进水,直到高(中、低)水位,然后关水; ()秒后开始洗涤; ()洗涤时,正转秒,停秒,然后反转秒,停秒; ()如此循环次,总共秒后开始排水,排空后脱水秒; ()开始清洗,重复()~(),清洗两遍; ()清洗完成,报警秒并自动停机; ()若按下停车按扭,可手动排水(不脱水)和手动脱水(不计数)。
洗衣机出现故障对于女生来说,绝对是最具打击力的。因为只有在洗衣机罢工这种时候才会感叹自己的衣服太多。如果再遇上洗衣机一直放水的,不仅费力费事还费水,洗衣机为什么一直放水的问题一定要学会解决。 一,首先,全自动洗衣机只进水不运行,如果进水到一定位置自己停的话,是电机或者电脑版的问题。 二,如果全自动洗衣机不停的进水,那就是洗衣机水位器坏了。 三,如果全自动洗衣机只排水不运行,那就是电脑版的问题了,电机的可能性很小。 四,半自动洗衣机,只进水不运行可能是定时器坏了,也有可能是电机坏了。 五,排查与解决方法:
1,打开控制座,检查水位开关上的插片与控制导线的插头有没有松脱,而使接触不良,若松脱,只需把插头与插片插牢即可。 2,切断电源,拔下控制导线插头,用万用表电阻档测量水位开关两插片间的电阻值,来判断是否导通。 导通是正常的若不导通,说明此水位开关不正常,再检查是否由于临时使用或本身材质问题而使水位开关橡胶密封圈破损漏气,若是就需更换新的水位开关。 3,再检查一下水位开关控制弹簧是否正常,如果弹簧力太大,会使橡胶密封圈运动受阻,而不能动作,此时,可以调整其上的调节螺钉,使其处于正确位置即可。 4,检查是否由于水位开关其他零件损坏而引起的如果已损坏,就需要更换新的水位开关。 5,其次,选择脱水程度,看水排完后,洗涤脱水桶是否运转。 若运转,说明是正常的若没有运转,就有可能是水位开关出故障,两插片触点处于常通状态,这样就需要检查维修或更换水位开关。 6,对于机械式全自动洗衣机的水位开关,有3 个插片,分2 组。自由状态,一组导通而另一组断开。 当受气压橡胶密封困动作后,导通的一组断开,断开的一组导通,此时是正常的具体的检查方法同上。
课题二全自动洗衣机的PLC控制 一、概述 洗衣机的应用现在比较普遍。全自动洗衣机的实物示意图如图所示。 全自动洗衣机的洗衣桶(外桶)和脱水桶(内桶)是以同一中心安放的。外桶固定.作盛水用。内桶可以旋转.作脱水(甩水)用。内桶的四周有很多小孔.使内外桶的水流相通。该洗衣机的进水和排水分别由进水电磁阀和排水电磁阀来执行。进水时.通过电控系统使进水阀打开.经进水管将水注入到外桶。排水时.通过电控系统使排水阀打开.将水由外桶排出到机外。洗涤正转、反转由洗涤电动机驱动波盘正、反转来实现.此时脱水桶并不旋转。脱水时.通过电控系统将离合器合上.由洗涤电动机带动内桶正转进行甩干。高、低水位开关分别用来检测高、低水位。启动按钮用来启动洗衣机工作。停止按钮用来实现手动停止进水、排水、脱水及报警。排水按钮用来实现手动排水。 二、设计任务和要求 该全自动洗衣机的要求可以用流程图来表示。 PLC投入运行.系统处于初始状态.准备好启动。启动时开始进水.水满(即水位到达高水位)时停止进水并开始正转洗涤。正转洗涤15 s后暂停.暂停3 s后开始反转洗涤。反转洗涤15s 后暂停.暂停3 s后.若正、反洗涤未满3次.则返回从正转洗涤开始的动作;若正、反洗涤满3次时.则开始排水。排水水位若下降到低位时.开始脱水并继续排水。脱水10s即完成一次从进水到脱水的工作循环过程。若未完成3次大循环.则返回从进水开始的全部动作.进行下一次大循环;若完成了3次大循环.则进行洗完报警。报警10s结束全部过程.自动停机。’此外.还要求可以按排水按钮以实现手动排水;按停止按钮以实现搬运.停止进水、排水、脱水及报警。
三、设计方案提示 1.I/O地址 输入输出 :启动按钮:进水电磁阀 Xl:停止按钮:电动机正转接触器 :排水按钮:电动机反转接触器 :高水位开关:排水电磁阀 :低水位开关:脱水电磁阀 :报警蜂鸣器 2.方案提示 ①用基本指令、定时指令和计数指令组合起来设计该控制程序。 ②用步控指令实现该控制。
基于CCD传感器的智能寻迹模型车的研究与实现 董长远 长安大学汽车学院车辆工程系,陕西省西安市 710064 摘要: 研究并实现了一种基于CCD传感器的智能寻迹模型车系统。采用飞思卡尔公司HCS12 系列16位单片机MC9S12DG128作为核心控制单元,使用CCD 摄像头采集路面信息。赛车完成的主要功能是能够自主识别黑色引导线并根据黑线走向实现快速稳定的寻线行驶。 关键词:智能车;CCD传感器;路径识别;捷径 Investigation & implementation of an intelligent-searching track car model based on CCD Image Sensor DONG ChangYuan Automobile School, CHANG-AN University, Xi’an City, Shanxi Province 710064, China Abstract: An intelligent-searching track car model based on CCD image sensor is investigated and implemented. The intelligent car system, with Freescale HCS12 series 16 bit single-chip MC9S12DG128 as its control micro-processor, uses CCD camera to obtain lane image information.The main function that the intelligent car may achieve is that the car should track the black-guide-line automatically and move forward following the line as fast and stable as possible. Key words: intelligent car;CCD Image Sensor;lane detection;royal road 1.引言 车辆和我们的社会生活息息相关,然而当今车辆的智能化发展还不是很迅速,特别是在安全性,智能性,车与路之间交互信息等方面.当今的车辆技术与未来的智能车辆技术还存在着巨大的差距。几天的汽车工程师正面临着巨大的挑战,需要在新旧技术之间建立一座桥梁,通过应用先进的电子技术,信息技术,电子通信技术推动车辆技术的进步。 智能车辆是当今车辆工程领域研究的前沿,它体现了车辆工程、人工智能、自动控制、计算机等多个学科领域理论技术的交叉和综合,是未来汽车发展的趋势。本文所述的智能寻迹模型车系统基于Freescale HCS12单片机开发与实现,系统采用CCD摄像头识别道路中央黑色的引导线,自动控制小车前进和转向,从而实现快速稳定的寻线行驶。为保证智能车在行驶过程具有良好的操稳性和平顺性,控制系统对转向舵机控制和直流电机驱动控制提出了较为理想的解决方案。为了在比赛中取得良好的成绩,我们更加关注此智能车对弯直道的判断,从而实现安全过弯,快速通过直道。
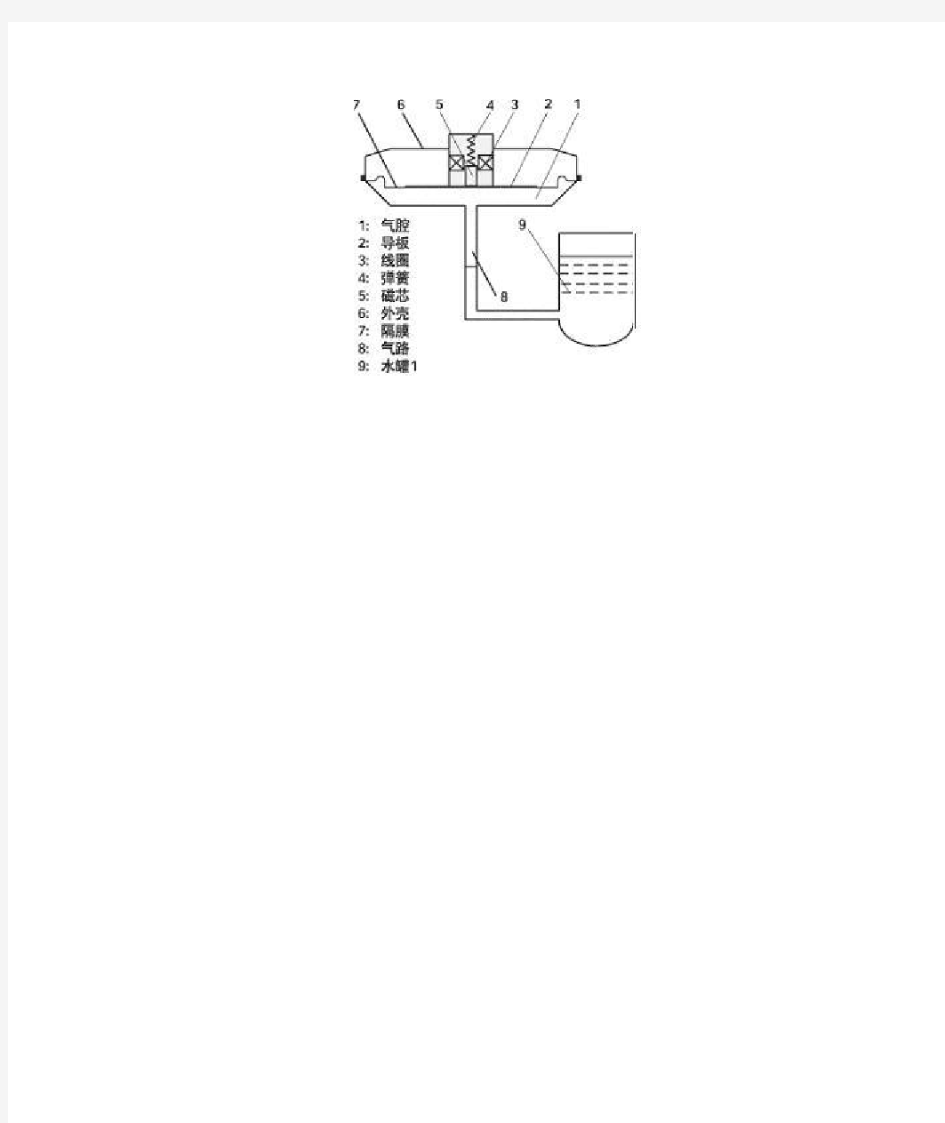
光电传感器 一、反射式光电传感器简介 反射式光电传感器在机器人中有着广泛的应用。可以用来检测地面明暗和颜色的变化,也可以探测有无接近的物体。这种光电传感器的基本原理是,自带一个光源和一个光接收装置,光源发出的光经过待测物体的反射被光敏元件接收,再经过相关电路的处理得到所需要的信息。相应的,光谱范围,灵敏度,抗干扰能力,输出特性等都是反射式光电传感器的重要参数。 二、简单比较型光电传感器 在上左图中,JP1是光电管,接收光强在上面转换成电流,在R上成为电压信号,与RA1的标准值进行比较,从LM339输出逻辑电平给单片机。 R越大,光电流产生的电压变化越大,传感器也就越灵敏。但是若R过大,当光比较强的时候,R上的电压会达到VCC而不再变化,这就是所谓的饱和。在这种比较型的传感器电路中,饱和只会使强光与强光难以分辨,但仍可以区分强光和弱光,它并不是影响比较结果的重要因素。但在后面介绍的几种调制型传感器中,饱和是必须避免的,因为它会掩盖交流分量。高灵敏度和饱和是一对矛盾,在后面提到了一些相关的解决方案。 LM339是开路输出的,10K的电阻是为了使输出电压正确。如果后面是51之类开路输入的单片机,这个电阻可以省略。 假如把光敏管放在下边,电阻放在上边。这样当光线较暗时比较器输入电压接近VCC,超过比较器LM339能够正常工作的最高输入电压Vm,比较器不能正常工作(LM339的共模输入电压最低能低到0,但是最高达不到VCC),因此灵敏度做不高。为了使比较器正常工作,电阻值应使得光照时比较器输入电压Vi大幅下降,满足VCC-I*R 全自动洗衣机程序设计 第一部分总体思路 全自动洗衣机的工作原理:开始-进水-洗衣-排水-脱水-结束 第二部分电气设计部分 如下图为全自动洗衣机的PLC控制系统电路图。通过PLC来实现电动机的正反转,并且实现洗衣机按预先设置的程序自动执行,完成洗衣。当需要手动排水与脱水时,可强制止自动程序的运行,跳出自动切换到手动操作。 为防止全自动洗衣机在工作过程中,电路发生短路,损坏电动机和电路中的各种电气设备,因此在主电路中安装了熔断器,当电路出现短路故障时,能迅速、可靠的断开电源。 全自动洗衣机在无人问津的情况下可能长时间运行,为防止电机绕组的温升超过额定值而损坏,采用热继电器作为保护元件,与熔断器搭配使用,可靠地保护电动机。 人机接口部分的按钮等都选择低压电器元件,保护操作者的安全。 第三部分 PLC设计部分 3.1正常运行流程图如下图所示。 3 2强制运行流程图如下 1)程序的构成 这个程序有自动方式和手动方式两种。在自动方式下,PLC将运行已经设置好的程序和参数(适用于机械一切都正常工作的情况下)。在手动方式下是在紧急停止情况下,可以手动排水和脱水。 2)程序的下载、安装和调试 将各个输入输出端子和实际控制系统中的按钮。所需控制设备正确连接,完成硬件的安装。全自动洗衣机程序是由GX Developer软件的指令完成,正常工作是程序存放在存储卡中,若要修改程序,先将PLC设定在STOP状态下,运行GX Developer编程软件,打开全自动洗衣机程序,即可在线调试,也可用编程器进行调试。 第四部分全自动洗衣机控制系统PLC程序 4.2.1系统资源分配 1.数字量输入部分 这个控制系统的输入有启动按钮、停止按钮、水位选择开关(高水位、中水位、低水位)、手动排水、自动排水开关、高水位浮球开关、中水位浮球开关,低水位浮球开关、水排空浮球开关、压力开关共12个。具体的输入地址分配如表4.1所示。 表4.1 输入地址分配 X001 SB1 启动按钮 X002 SB2 停止按钮 X003 SB3 高水位选择开关 X004 SB4 中水位选择开关 X005 SB5 低水位选择开关 X006 SQ1 水排空检测开关 X007 SQ2 高水位检测开关 X010 SQ3 中水位检测开关 X011 SQ4 低水位检测开关 X012 SB6 手动排水 X013 SB7 手动脱水 X014 SP1 压力开关 这个控制系统需要控制的外部设备有进水电磁阀、排水电磁阀、洗涤电动机、脱水桶、报警器共五个设备。但是由于洗涤电动机有正转和反转两个状态,分别 寻迹小车 在历届中多次出现了集光、机、电于一体的简易智能小车题目。笔者通过论证、比较、实验之后,制作出了简易小车的寻迹电路系统。整个系统基于普通玩具小车的机械结构,并利用了小车的底盘、前后轮电机及其自动复原装置,能够平稳跟踪路面黑色轨迹运行。 总体方案 整个电路系统分为检测、控制、驱动三个模块。首先利用光电对管对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。系统方案方框图如图1所示。 图1智能小车寻迹系统框图 传感检测单元 小车循迹原理 该智能小车在画有黑线的白纸“路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。笔者在该模块中利用了简单、应用也比较普遍的检测方法——红外探测法。 红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号。 传感器的选择 市场上用于红外探测法的器件较多,可以利用反射式传感器外接自制探头,也可以使用结构简单、工作性能可靠的集成式红外探头。ST系列集成红外探头价格便宜、体积小、使用方便、性能可靠、用途广泛,所以该系统中最终选择了ST168反射传感器作为红外光的发射和接收器件,其内部结构和外接电路均较为简单,如图2所示: 图2ST168检测电路 ST168采用高发射功率红外光、电和高灵敏光电晶体管组成,采用非接触式检测方式。ST168的检测距离很小,一般为8~15毫米,因为以下是它的检测盲区,而大于15毫米则很容易受干扰。笔者经过多次测试、比较,发现把传感器安装在距离检测物表面10毫米时,检测效果最好。 R1限制发射的电流,发射管的电流和发射功率成正比,但受其极限输入正向电流50mA的影响,用R1=150的电阻作为,Vcc=5V作为电源电压,测试发现发射功率完全能满足检测需要;可变电阻R2可限制接收电路的电流,一方面保护接收红外管;另一方面可调节检测电路的灵敏度。因为传感器输出端得到的是模拟电压信号,所以在输出端增加了比较器,先将ST168输出电压与进行比较,再送给单片机处理和控制。 传感器的安装 正确选择检测方法和传感器件是决定循迹效果的重要因素,而且正确的器件安装方法也是循迹电路好坏的一个重要因素。从简单、方便、可靠等角度出发,同时在底盘装设4个红外探测头,进行两级方向纠正控制,将大大提高其循迹的可靠性,具体位置分布如图3所示。 红外避障传感器介绍(反射型)日期:2006-5-16 14:05:14 来源: 点击: 1572 添加到收藏夹 实图: 技术指标: 主体外形尺寸:23×15.3×15.1mm(长×宽×高) 重量:7g 额定电压:直流电源5.0V 检测范围(反射面为白色木板):1~ 40cm(挡板为白色时检测距离在40cm时达到临界点,超过此数值后检测效果变差) 调节方式:多圈电阻式调节,逆时针方向旋转功率变小,顺时针方向旋转功率变大 返回值:有信号(高电平)返回值为“1”,无信号(低电平)返回值为“0” 状态指示方式:检测到信号指示灯亮红灯,无信号不亮 安装方式:单颗?3螺丝安装 线长:17.4cm±0.2cm(有效距离) 连接方式:单条3芯排线,2510型3脚插头 有效角度:30 左右 原理与功能 红外避障传感器(以下简称红外)。红外具有一对红外信号发射与接收二极管,发射管发射一定频率的红外信号,接收管接收这种频率的红外信号,当红外的检测方向遇到障碍物(反射面)时,红外信号反射回来被接收管接 应用介绍: 红外是通过发射端发射红外信号,接收端接收由障碍物反射回来的红外信号,来判断是否有障碍物。 项目应用 红外避障传感器在很多项目中都有使用。 在初中灭火、高中搜救项目中,机器人可以通过红外避障传感器走迷宫; 在轨迹项目中,机器人可以通过黑、白色对红外线的反射和吸收值不同而用红外避障传感器来识别黑色的轨迹线。 注意事项: 1、红外是数字传感器,红外接收管只有在接收到一定强度的红外信号时才会有数值的变化。障碍物(反射面)太小时,红外会检测不到;障碍物(反射面)颜色为黑色或深色时,会被吸收大部分的红外信号,而只反射回一小部分,导致红外接收管接收到的红外信号强度不够,不足以产生有障碍物(反射面)的信号。 2、红外在暖光源的照射下(如白炽灯、太阳光)检测受到很大影响,它会受到所有相近红外信号的干扰,白炽灯和太阳光中含有红外信号成分较多,对红外的影响也较大。红外相互之间也存在干扰,因而在使用时需要注意。 3、红外采用的是发射、接收原理,不同反射面对红外信号的吸收与散射,将影响其检测范围,根据测试红色的反射面效果最佳,白色其次,黑色最差;同时反射面的粗糙度和平整度也会影响检测的效果。 检修全自动洗衣机水位开关及水位传感器的结构与常见故 障 一、水位开关水位开关是波轮式全自动洗衣机控制洗涤桶中水量的电气元件,水位开关主要由杠杆、导管、调节螺钉、压力弹簧、凸轮、顶芯、开关小压簧、动簧片、塑料盘、橡胶膜、气室、压力软管(导压管)、连接套、气嘴、常开触点、常闭触点组成,如图1所示。水位开关通过导压管(压力软管)与洗衣机外桶上的气室连接,而气室是与外桶底部连通的,如图2所示。在洗衣机洗涤工作过程中,当进水电磁阀向洗涤桶内进水时,桶内的水面会不断地升高,在它超过外桶底部的气室入口时,气室内的空气被压缩,气压也随着增大,水位开关内的橡皮膜被气压推动逐渐向上运动,带动水位开关内部触点通断;当排水时,桶内的水位逐渐下降,气压也随之下降,当压力下降到水位开关的触点复位点时,触点动作,接通脱水电路,开始脱水。 水位开关凸轮轴的顶端装有水位旋钮,用户可以通过拧动旋钮来设定水位,当凸轮轴转动时,凸轮的a,b,c,d,e,f六个点分别与杠杆接触,如图3所示。杠杆在不同位置时压力弹簧的压力也不相同,开关闭合点和复位点也不相同,因此形成高、中、低等不同的水位,同时水位开关还设置了补进水功能,若开始洗涤后,用户感觉水位不够,可以将旋钮拧到' 补进水'位置,就开始补水,手松开后,停止补水。二、水位传感器带有模糊控制的电脑全自动洗衣机多采用 水位传感器来控制水位,水位传感器与水位开关的作用相当,能更加准确地控制水位,一般具有10挡水位或15挡水位,而水位开关最多只具有三四挡水位,因此水位传感器在电脑全自动洗衣机中被越来越广泛采用。水位传感器的结构如图4所示,橡胶隔膜的作用是密封气室;弹簧的作用是以一定的弹力压在橡胶隔膜上,将橡胶隔膜的非线性变化转变成磁芯的线性位移变化,同时对磁芯的抖动现象起阻尼作用;磁芯的作用是在周围产生磁场,通过它上下的移动来改变电感线圈的电感量。电感线圈与电容组成LC振荡电路,如图 5所示,通过电感线圈电感量的变化,改变其振荡电路的振荡频率;调整螺钉可以调整水位传感器的精度。电路中虚线框内的元件安装在水位传感器外壳上,虚线框内电路由反相器1,2,电阻R1,R2,电容C1,C2,电感线圈L组成基本LC振荡电路,反相器3将振荡电路输出的非数字脉冲信号,送到单片机IC中。反相器1-3是数字电路,输入端为高电平时,输出端为低电平,反之输入端为低电平时,输出端为高电平。由于R1,R2两个电阻加在反相器1,2的输入和输出两端,使反相器工作特性发生变化,并使该电路工作在线性放大区,电路对输入信号有近10倍的放大作用。 二.红外避障传感器避障传感器主要包括:超声波避障传感器,红外避障传感器,激光避障传感器等等。1.可以希望在相当短的时间内获得较多的红外传感器测量值以及测距范考虑到发射光线是光,30cm以内,所以我们选择红外避障传感器安装在机器人上。围较近,大致为 2.红外避障传感器的优点: 1)环境适应性好,在夜间和恶劣气象条件下的工作能力优于可见光;(2)被动式工作,隐蔽性好,不易被干扰;()靠目标和背景之间各部分的温度和发射率形成的红外辐射差进行探测,因而识别伪装(3 目标的能力优于可见光;)红外系统的体积小、质量轻、功耗低;(4 )不受电磁波的干扰、非噪声源、可实现非接触性测量。(5 红外避障传感器的不足: 3. 周围的光线都能导方向、由于传感器测量光的差异,其受环境的影响非常大,物体的颜色、致较大的测量误差。工作原理: 4. )红外避障传感器:(1接收管接收这发射管发射一定频率的红外信号,具有一对红外信号发射与接收二极管,红外信号反射回来被接当传感器的检测方向遇到障碍物(反射面)时,种频率的红外信号,机器人即可利用红外波经过处理之后,通过数字传感器接口返回到机器人主机,收管接收,的返回信号来识别周围环境的变化。光学系统按结构不同可分为透射式红外线传感器包括光学系统、检测元件和转换电路。热敏元件应用最和反射式两类。检测元件按工作原理可分为热敏检测元件和光电检测元件。通过转换电路变成热敏电阻受到红外线辐射时温度升高,电阻发生变化,多的是热敏电阻。电信号输出。)热敏检测元件(2 热阻效应:物质的电阻率随温度变化的物理现象叫热阻效应。金属热电阻的电阻值和温度一般可以用以下的近似关系式表示,即)t0]Rt=Rt0[1+α(t-为温度系α(通常t0=0℃)时对应电阻值;Rt0Rt式中,为温度t时的阻值;为温度t0 数。半导体热敏电阻的阻值和温度关系为Rt=AeB/t 取决于半导体材料的结构的常数。B、A时的阻值;t为温度为Rt式中 (3)光电检测元件 光电效应:在高于某特定频率的电磁波照射下,某些物质内部的电子会被光子激发出来而形成电流,即光生电,分为外光电效应和内光电效应。 光电导效应:在光线作用下,电子吸收光子能量从键合状态过渡到自由状态,而引起材料电导率的变化。当光照射到光电导体上时,若这个光电导体为本征半导体材料,且光辐射能量又足够强,光电材料价带上的电子将被激发到导带上去,使光导体的电导率变大。基于这种效应的光电器件有光敏电阻。 洗衣机是一种非常方便的家电,帮助我们节省了日常生活中洗衣服的繁琐,但是用久了全自动洗衣机容易出现各种问题,下面和闪电家修一起来看看洗衣机故障维修图解吧。 一、不进水 1、接通电源,耳朵接近进水阀有无“嗡嗡”的叫声,检查是否自来水断水,关闭水龙头,旋出进水管接头检查进水阀的过滤网是否有异物堵塞,如果有拔出过滤网进行清洁,如果问题还未解决应更换进水阀,可能进水阀阀芯卡死无法打开。 2、如果进水阀没有“嗡嗡”的叫声,此时应试一下更换电脑板,可能问题在电脑板上。 二、不脱水 1、首先检查安全开关,洗衣机接通电源程序调到脱水状态,用手或工具把安全开关制动臂按到最低,如果计算机板报警且数码管显示“E1”,此时应更换安全开关或电脑板。 2、如果用手或工具把安全开关制动臂按下后能正常脱水,说明安全开关的断电距离已偏低,此时应更换安全开关。 3、如果在脱水状态时,只有波轮转而内桶未转动,此时应检查牵引器是否已把离合器的棘爪和棘轮分离,如果没有可能是排水阀上的调节杆螺母松动和磨损,导致打开距离不够,此时应重新调整调节杆的距离,使之能把离合器的棘爪和棘轮分离。 三、进水不止 1、一般情况为进水阀阀芯卡住,通电打开后无法复位,导致一直进水,此情况先更换进水阀。 2、如果故障未解决,问题出在水位开关,使用时间一长,水位开关可停止进水,引起进水不止,此时应更换水位开关。 3、如果压力管因使用时间一长磨损破裂或压力管与水位开关及外桶气嘴接触不良或脱开引起漏气也可导致进水不止。 4、如果计算机板因压力不到,水位开关不动作而误解为水位进水不止,此时应检查压力管有无磨损及两接头处有无接触不良或脱开。 5、因使用时间一长,有异物堵住气嘴口,导致压力无法传到压力开关,此时应拧下大螺母,然后拿出内桶,把堵住气嘴的异物取出。 6、如果一切无效,应试一下更换电脑板,因为一切的动作都由电脑机板控制。 毕业设计(论文) 基于红外传感器的自动寻迹智能小车设计 系别 专业 班级学号 姓名 指导教师 基于红外传感器的自动寻迹智能小车设计 摘要 介绍了一种自动寻迹智能车的设计,研究了采用红外反射式光电传感器作为路径采集模块实现自动寻迹的软硬件设计方法。系统采用Freescale 16位单片机MC9S12DG128为核心控制器,利用12个红外光电传感器构成的光电传感器阵列采集路面信息,单片机获得传感器采集的路面信息和车速信息,经过分析后控制智能车的舵机转向,同时对直流电机进行调速,从而实现智能车沿给定的黑线快速平稳地行驶。介绍了光电传感器的寻迹原理,讨论了光电传感器排列方法、布局等对寻迹结果的影响及速度和转向控制的PID算法的研究和参数整定。 关键字:光电传感器,寻迹,路径识别,PWM,PID Design of autonomous tracing smart car based on infrared sensors Author:Xue Changliang Tutor:Gu Deying Abstract A design of autonomous tracing system in intelligent vehicle is introduced. The software and hardware design method which realizes the autonomous tracing using the infrared Reflective photoelectric sensors as the path recognition module is researched. The system employs Freescale HCS series 16 bit single-chip microcomputer MC9SDG128 as its main controller and an array of photoelectric sensors for recognizing the path information. Single-chip Microcomputer energizes the PWM signal to steer and control the speed of the DC electric motor according to the analysis of the path and speed information from sensors. Consequently, this intelligent vehicle can track the black-guide-line automatically and move forward following the line quickly and smoothly. The autonomous tracing principle of photoelectric sensor is presented. The effects of sensor s’ array method, overall arrangement on the autonomous trace are discussed. And the use of PID algorithm in speed and steering control. Key words : photoelectric sensor ,autonomous tracing, path recognition, PWM,PID 光电检测技术与应用 论文 题目:红外测距传感器的工作原理及使用 院系:机电工程学院 班级:测控xxxx 完成日期:2017/5/6 小组:第x组 小组成员:xxxxxxxxxx 红外测距传感器的工作原理及使用 摘要: 利用光的反射性质,将光学系统与电路系统相结合可以制作避障传感器,通过单片机的控制,可以完成智能车在运行过程中,对障碍物的处理。避障传感器基本原理:利用物体的反射性质。在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调车轮或者舵机工作,完成躲避障碍物的动作。 关键字:光电检测技术、智能车、测距、红外测距传感器、单片机 一、引言 光电检测作为光学与电子学相结合而产生的一门新兴检测技术,主要包括光信息获取、光电变换、光信息测量以及测量信息的智能化处理等,具有精度高、速度快、距离远、容量大、非接触、寿命长、易于自动化和智能化等优点,在国民经济各行业中得到了迅猛的发展和广泛的应用,如光扫描、光跟踪测量,光纤测量,激光测量,红外测量,图像测量,微光、弱光测量等,是当前最主要和最具有潜力的光电信息技术。 二、光电检测技术的概念 光电检测技术是光学与电子学相结合而产生的一门新兴检测技术。它主要利用电子技术对光学信号进行检测,并进一步传递、储存、控制、计算和显示。光电检测技术从原理上讲可以检测一切能够影响光量和光特性的非电量。它可通过光学系统把待检测的非电量信息变换成为便于接受的光学信息,然后用光电探测器件将光学信息量变换成电量,并进一步经过电路放大、处理,以达到电信号输出的目的。然后采用电子学、信息论、计算机及物理学等方法分析噪声产生的原因和规律,以便于进行相应的电路改进,更好地研究被噪声淹没的微弱有用信号的特点与相关性,从而了解非电量的状态。微弱信号检测的目的是从强噪声中提取有用信号,同时提高测系统输出信号的信噪比。 光电检测技术的系统机构比较简单,分为信号的处理器,受光器,光源。在实际检测过程中,受光器在获得感知信号后,就会被反映为不同形状、颜色的信号,同时根据这些器件所处在的不同位置,就能够将他分为反射型与透过型的两种比较的模式。光电检测的媒介光应当是自然的光,例如白炽灯或者萤光灯。特别是随着这些技术的发展,光电技术也取得的非常好发展。由于投光器在发出光后,会以不一样的方式触摸这些被检测物中,直到照射到检测系统中的受光器中,同时受光器在此刺激下,会产生一定量的电流,这就是我们常说的光敏性的原件,实际生活中应用比较广泛的有三极管、二极管。 三、光电检测技术的应用 智能车方面的应用、家庭扫地机器人方面的应用:利用光的反射性质,将光学系统与电路系统相结合可以制作避障传感器,通过单片机的控制,可以完成智能车在运行过程中,对障碍物的处理。避障传感器基本原理:利用物体的反射性质。在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调车轮或者舵机工作,完成躲避障碍物的动作。 四、常用光电检测器件:红外测距传感器 原理:其输出为电压数值,通过公式L?=?(6762/(9-X))-4可计算出小车与障碍物之间的距离。全自动洗衣机程序设计
循迹小车原理
红外避障传感器简介
检修全自动洗衣机水位开关及水位传感器的结构与常见故障
红外避障传感器
洗衣机故障维修图解
基于红外传感器的自动寻迹智能小车设计
红外测距传感器的工作原理及使用
相关主题
文本预览