zigbee的cc2530超声波测距
- 格式:doc
- 大小:1.22 MB
- 文档页数:9
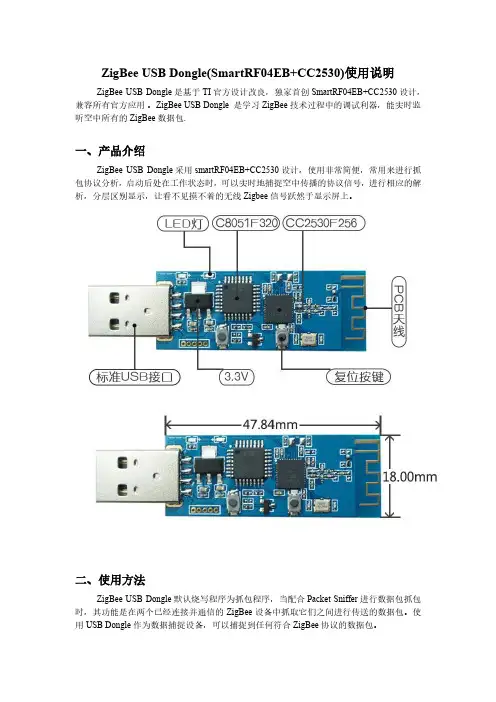
ZigBee USB Dongle(SmartRF04EB+CC2530)使用说明
ZigBee USB Dongle是基于TI官方设计改良,独家首创SmartRF04EB+CC2530设计,兼容所有官方应用。
ZigBee USB Dongle 是学习ZigBee技术过程中的调试利器,能实时监听空中所有的ZigBee数据包.
一、产品介绍
ZigBee USB Dongle采用smartRF04EB+CC2530设计,使用非常简便,常用来进行抓包协议分析,启动后处在工作状态时,可以实时地捕捉空中传播的协议信号,进行相应的解析,分层区别显示,让看不见摸不着的无线Zigbee信号跃然于显示屏上。
二、使用方法
ZigBee USB Dongle默认烧写程序为抓包程序,当配合Packet Sniffer进行数据包抓包时,其功能是在两个已经连接并通信的ZigBee设备中抓取它们之间进行传送的数据包。
使用USB Dongle作为数据捕捉设备,可以捕捉到任何符合ZigBee协议的数据包。
基于ZigBee的智能车位管理系统摘要:本文设计了一种基于ZigBee技术的无线停车场车位管理系统。
无线传感网络部分采用CC2530芯片+超声波模块的形式完成数据的采集、传输,并通过协调器、PC、Internet网络的数据交换达成整个系统的顺利运行。
关键词:ZigBee 传感网络车位管理Intelligent Parking Management System Based on ZigBeeAbstract:This paper introduces a design of parking management system based on ZigBee wireless technology.Wireless sensor network use the CC2530 chip and ultrasonic module to complete data collection,transmission,and through the data exchange among coordinator, PC,Internet to reach the whole system running smoothly.Key words:ZigBee;sensor network;parking management现代停车场正朝着复杂化、大型化及高科技化方向发展。
对日益复杂的停车场,传统的人工管理变的不再那么可靠。
单一管理者面对数量庞大的停车位的变得越发手足无措起来。
一些新的管理技术不断引入,给停车场车位的管理带来了新的曙光。
让停车场车位管理更加灵活、方便与安全变为可能。
停车场车位管理在国内作为一种新兴的技术越来越受到相关部门的重视。
ZigBee技术的出现为解决停车场车位信息实时采集提出了很好的解决方案。
1 ZigBee技术ZigBee是一种双向无线近距离的通信技术[1],是一种基于IEEE802.15.4无线标准而开发的通信技术,易于组网、通信安全、应用广泛。
cc2530的接口实验的实验原理下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
本文下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Downloaded tips: This document is carefully compiled by the editor. I hope that after you download them, they can help you solve practical problems. The documents can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!In addition, our shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!CC2530是一款常用于物联网设备的芯片,其接口实验是物联网领域中的重要实践之一。
--电气参数
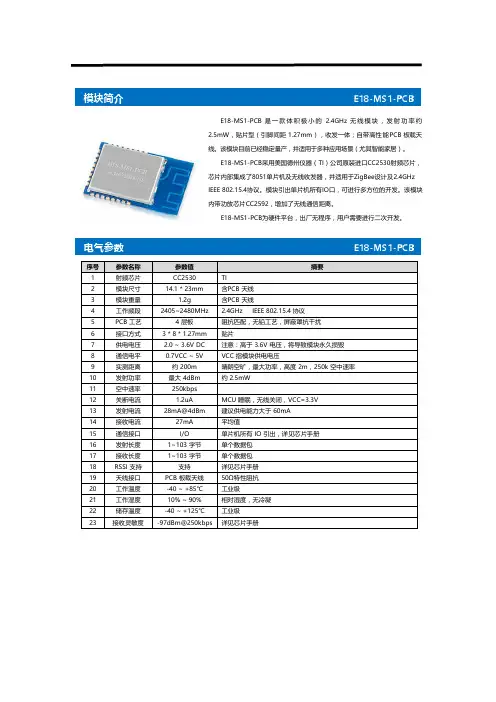
E18-MS1-PCB
E18-MS1-PCB 是一款体积极小的2.4GHz 无线模块,发射功率约2.5mW,贴片型(引脚间距1.27mm),收发一体;自带高性能PCB 板载天线。
该模块目前已经稳定量产,并适用于多种应用场景(尤其智能家居)。
E18-MS1-PCB采用美国德州仪器(TI)公司原装进口CC2530射频芯片,芯片内部集成了8051单片机及无线收发器,并适用于ZigBee设计及2.4GHz IEEE 802.15.4协议。
模块引出单片机所有IO口,可进行多方位的开发。
该模块内带功放芯片CC2592,增加了无线通信距离。
E18-MS1-PCB为硬件平台,出厂无程序,用户需要进行二次开发。
--
*我司提供Altium designer封装库请前往官网下载或联系我们索取
--注意事项E18-MS1-PCB
关于我们E18-MS1PA1-IPX (EBYTE)是一家专业提供无线数传方案及产品的公司
◆自主研发数百个型号的产品及软件;
◆无线透传、WiFi、蓝牙、Zigbee、PKE、数传电台……等多系列无线产品;
◆拥有近百名员工,数万家客户,累计销售产品数百万件;
◆业务覆盖全球30多个国家与地区;
◆通过了ISO9001质量管理体系、ISO14001环境体系认证;
◆拥有多项专利与软件著作权,通过国际FCC/CE/ROHS等权威认证。


CC2530APK 使用说明ES Technology 2013年6月10号版本:V1.01模块介绍CC2530APK Z IGBEE模块使用1.5dB的贴片陶瓷天线,在小体积的同时实现远距离的无线通信,并可以实现超低功耗大规模组网,模块的主要参数如下表:模块特点:1.板子尺寸小,采用标准的2.54mm间距插针设计,方便连接和开发;2.功耗低,传输距离远,休眠模式功耗只有0.03uA;3.板子所有IO引出并在板子背面标注引脚定义,方便使用;4.板载电源LED显示,可以指示模块是否连接电源;5.板载多达8个电源滤波电容,供电稳定可靠;6.可以和本店铺的ZigBee开发底板配合使用。
●外形尺寸:●引脚定义:引脚定义图引脚定义(正面放置)注意:1.电源正负极不能接反,否则会烧坏芯片。
2.电源电压VCC输入范围2.5V-3.6V。
2模块原理图模块原理图请参考资料提供的PDF原理图文档。
3模块连接说明本店铺提供转接板,可以直接和转接板相连,变成直插模块,然后和我们店铺的底板相连,方便开发,如下图所示:CC2530APK专用转接板CC2530APK焊接在转接板上与本店铺ZigBee开发底板相连如下图所示:本店铺的的ZigBee开发底板如下图所示。
开发底板的主要硬件有:1.板载USB转串口芯片PL2303,直接插上USB就可以实现和电脑通信,无需外加USB转串口线;2.板载3个3色LED和3个按键,方便用户调试;3.所有IO口全部引出,并在板子上清楚标明,使用非常方便;4.集成12864的液晶接口,插上液晶后,可以实现各种参数的显示;5.可以选择USB电源供电或者外置电池供电,板载两种电源接口;6.有电源开关和编程接口。
易思ZigBee开发底板和电脑连接如下图所示:模块使用USB 线和电脑相连并安装PL2303驱动,即可以实现电脑与无线模块进行通信,通信的界面如下图所示:易思的ZigBee 最小模块可以和其他单片机进行连接,使用串口实现其他单片机与CC2530模块进行通信,只要连接4根线,连接方法如下:单片机 CC2530 模块单片机与CC2530模块连接图程序上,使用串口通信代码,设置好合适的波特率就可以实现两个单片机之VCC单片机的 RX 引脚 单片机的 TX 引脚 单片机的 GND 引脚VCC (2.5V-3.3V )CC2530的 RX 引脚(P02) CC2530的 TX 引脚(P03) CC2530的 GND 引脚(GND )间进行通信。
基于ZigBee技术的温湿度远程监测系统设计学生:陈园(指导老师:吴琰)(淮南师范学院电子工程学院)摘要: 针对目前温室大棚农作物大面积种植,迫切需要科学的方法进行智能远程监测的研究现状,设计出一套温湿度远程监测系统。
该系统是有多个采集终端和一个协调控制器组成。
多个终端分别放置不同的大棚内进行实时采集数据,协调控制器的作用就是将多个采集终端通过无线传输过来的的数据进行分析并和PC机连接。
PC机上运行上位机软件实时的监测各大棚的温湿度信息。
多个终端和协调控制器均采用TI公司新一代CC2530芯片;温湿度传感器采用市场上比较流行的DHT11;无线传输采用ZigBee协议;上位机软件采用labVIEW编写,并通过RS-232与协调控制器连接通信。
通过实物测试了ZigBee无线传输的稳定可靠性,丢包率在误差范围内。
温湿度采集有0.5s延时时间,满足实时性要求。
关键词:终端;协调控制器;DHT11;CC2530;ZigBee;上位机Design of Remote Monitoring System for Temperature andHumidity based on ZigBee TechnologyStudent: Chen Yuan(Faculty Adviser:Wu Yan)(college of electronic engineering, Huainan Normal University)Abstract:According to the current situation of the research on the intelligent remote monitoring of greenhouse crops, the research status of intelligent remotemonitoring is urgently needed, and a set of remote monitoring system fortemperature and humidity is designed. The system is composed of a plurality ofacquisition terminals and a coordinated controller. Multiple terminals are placed indifferent greenhouses for real-time collection of data, the role of the coordinationcontroller is to collect more than one collection terminal through wireless datatransmission over the data analysis and PC machine connection. Temperature andhumidity information operation software of PC real-time monitoring of thegreenhouse on PC. A plurality of terminals and a coordinated controller are used ina new generation of CC2530 chip of TI company; temperature and humidity sensorused on the market more popular DHT11; wireless transmission based on ZigBeeprotocol; PC software using LabVIEW, and connected with the communicationthrough the RS-232 and coordination controller. The reliability of ZigBee wirelesstransmission stability test through the physical, the packet loss rate is in the rangeof error. Temperature and humidity acquisition 0.5s time delay, meet the real-timerequirements.Keywords:Terminal; coordination controller; DHT11;CC2530; ZigBee; host computer1. 绪论1.1 设计背景和研究意义现如今我国已经成为世界第一粮食生产大国,据有关统计说明,我国农作物设施栽培面积已经超过210万hm2。
CC2530实验指导书合肥市博焱科技有限公司目录一、CC2530基础实验部分 (3)1。
1 输入输出I/O 控制实验 (3)1.1.1 CC2530 基础实验1 :LED自动闪烁 (3)1.1。
2 CC2530 基础实验2 :按键控制LED开关 (5)1.2 中断实验 (6)1.2.1CC2530 基础实验3 :外部中断 (6)1。
3 定时/ 计数器实验 (8)1.3.1CC2530 基础实验4:T1使用 (8)1。
3.2CC2530 基础实验5 :T2使用 (9)1.3.3CC2530 基础实验6:T3使用 (12)1。
3.4 CC2530 基础实验8 :T4使用 (15)1.4 串口UART (17)1.4.1CC2530 基础实验9:单片机串口发数 (17)1.4.2CC2530 基础实验10:在PC用串口控制LED (19)1。
4.3CC2530 基础实验11:PC串口收数并发数 (20)1。
4.4CC2530 基础实验12:串口时钟PC显示 (22)1.5 睡眠定时器实验 (23)1。
5。
1 CC2530 基础实验13:系统睡眠工作状态 (23)1。
5。
2 CC2530 基础实验14 :睡眠定时器使用 (24)1。
6 ADC实验 (26)1.16.1 CC2530 基础实验15 :ADC实验 (26)1。
7 看门狗 (28)1。
7.1CC2530 基础实验16:看门狗模式 (28)一、CC2530基础实验部分1。
1 输入输出I/O 控制实验1.1.1 CC2530 基础实验1 :LED自动闪烁一、实验目的:本实验的目的是让用户了解CC2530的I/O接口的编程方法,学会使用I/O操作外部设备。
实验以LED为外设,通过I/O控制LED的亮灭.二、实验仪器设备仿真器1 台,传感器节点底板1 块,ZigBee 模块 1 块,USB 连接线1 根。
三、实验内容:(一)实验原理说明:硬件说明:图1 LED连接原理图如图1所示,发光二极管的D2的阴极与CC2530的P1_1连接,发光二极管的D3的阴极与CC2530的P1_0连接。
2018年/ 第10期 物联网技术可靠传输Reliable Transmission29基于CC2530的短距离无线通信系统的实现姜绍君,王忠健(大连理工大学城市学院,辽宁 大连 116600)摘 要:基于CC2530构成的系统可以进行可靠的短距离无线数据传输。
CC2530内部集成了符合IEEE 802.15.4协议的2.4 GHz 无线数据收发器,通过设置无线数据收发器相关寄存器的参数,能够灵活实现IEEE 802.15.4协议物理层和MAC 层的规定。
实验表明,该系统能够准确、高效地进行无线数据传输。
关键词:无线通信;CC2530;抗干扰;数据传输中图分类号:TP393 文献标识码:A 文章编号:2095-1302(2018)10-0029-02————————————————收稿日期:2018-05-04 修回日期:2018-06-06基金项目:辽宁省2016年大学生创新创业训练计划项目(201613198008)DOI :10.16667/j.issn.2095-1302.2018.10.0060 引 言随着半导体技术、无线通信技术的迅猛发展,短距离无线通信需求不断增加。
目前,短距离无线通信的技术标准包括WiFi 技术、蓝牙技术、ZigBee 技术。
其中,ZigBee 技术具有低速率、低功耗、灵活组网等特点,被广泛应用于无线传感器网络领域。
TI 公司设计生产的CC2530是一个满足ZigBee 技术标准的系统级SoC 芯片,TI 公司还开发出基于CC2530芯片,符合ZigBee 技术标准的软件包Z-Stack 协议栈[1-3]。
Z-Stack 协议栈是一个复杂的软件包,仅为用户提供应用函数接口,用户无法灵活实现数据通信。
因此,本文详细说明了CC2530的无线射频参数、数据传输的帧格式及数据收发的流程控制,用户可以开发适合自己工程应用的无线通信系统。
1 硬件设计1.1 CC2530处理器CC2530内部主要包含增强型8051微控制器、无线数据收发器以及其他相关模块,其具有高集成度、低电压、低功耗等特点[4]。

粤嵌推出自主研发cc2530zigbee开发套件粤嵌教育项目研发中心,作为粤嵌的核心技术基地,近年陆续推出了多款自主研发、结合当下技术前沿的主流产品,不断的把新技术运用到实验项目当中,从产品的性能和应用领域着手,致力于研发出基于物联网智能架构的全新嵌入式产品。
粤嵌8年的自主研发早已硕果累累,前不久举办的“粤嵌杯”嵌入式与物联网设计大赛上,粤嵌多年来自主研发的一系列教仪产品首度亮相展厅,其关注热度甚至超过比赛成为现场的焦点,不少学校相关专业领导都非常看好这些能将学生的理论运用到实践的教学仪器,甚至提出购买相关产品协助办学,改革目前的教学模式。
10月末,粤嵌项目研发中心又一力作诞生,全新推出的gec-2530EBZigbee开发套件,将粤嵌的嵌入式培训办学推向又一技术高度,旨在通过产品激发学生们的学习热情和动手能力,致力于把嵌入式相关专业学生打造成为企业争夺的综合性技术人才。
产品介绍1、GEC2530EB开发板1.1GEC2530EB开发板硬件资源1)GEC2530RF射频核心板GEC2530RF是基于TI公司第二代2.4GHzlEEE802.15.4/RF4CE/ZigBee的片上系统解决方案CC2530F256的全功能模块,集射频收发及MCU控制功能于一体。
外围元件包含一颗32MHz晶振和一颗32.768KHZ晶振及其他一些阻容器件。
采用板载PCB天线设计,采用巴伦匹配电路,接收灵敏度可达-97dB。
采用DlP2.54mm扩展接口,更加方便用户的扩展,甚至可以用万用板扩展。
在开阔的马路边上,其可视通信距离为200M,室内非混凝土墙可穿透三堵,距离大概可达到10M左右,视测试条件不同略有变化。
2)核心板IO 定义如图所示3)CC2530硬件特性简述强大无线前端低功耗 2.4GHzlEEE802.15.4标准射频收发器 接收模式:24毫安 出色的接收器灵敏度和抗干扰能力发送模式1dBm :29毫安 可编程输出功率为+4.5dBm ,总体无线连接101dbm功耗模式1(4微秒唤醒):0.2毫安 极少量的外部元件功率模式2(睡眠计时器运行):1微安 支持运行网状网系统,只需要一个晶体功耗模式3(外部中断):0.4微安 6毫米x6毫米的QFN40封装宽电源电压范围(2V —3.6V )微控制器应用领域高性能和低功耗8051微控制器内核2.4GHzIEEE802.15.4标准系统工业控制和监测256KB 系统可编程闪存 (32/64/128KB 可选) RF4CE 遥控控制系统(需要大于64KB )低功率无线传感器网络8KB 的内存保持在所有功率模式乙gBee 系统/楼宇自动化消费电子 硬件调试支持照明系统健康照顾和医疗保健ROD P0J P0_22107-6543zz」-CFO5 CP03 CP<0cP T I f P<22、CCDebugger仿真器CCDebugger是一款TICCDebugger增强型的仿真器/下载器。
基于CC2530及ZigBee协议栈设计无线网络传感器节点基于CC2530及ZigBee协议栈设计无线网络传感器节点近年来,随着物联网技术的快速发展,无线传感器网络(WSN)应用正在不断增加。
无线传感器节点作为WSN的重要组成部分,可以实时监测环境中的各种参数,并将数据传输到数据中心进行处理和分析。
本文将介绍基于CC2530芯片和ZigBee协议栈设计的无线网络传感器节点。
一、CC2530芯片介绍CC2530芯片是德州仪器(Texas Instruments)公司推出的一款低功耗、高性能的无线SoC芯片。
它集成了8051微控制器核心和IEEE 802.15.4无线收发器,提供丰富的外设接口,并支持多种通信协议,如ZigBee、RF4CE、ZigBee RF4CE、SP100和6LoWPAN。
其低功耗特性使其成为设计低功耗无线传感器节点的理想选择。
二、ZigBee协议栈简介ZigBee是一种低功耗、短距离无线通信技术,主要用于自动化控制、智能家居和工业应用。
ZigBee协议栈分为应用层、网络层、MAC层和物理层。
应用层负责定义各种应用场景下的数据交换格式和协议,网络层负责网络拓扑管理和路由选择,MAC层负责对数据进行处理和封装,物理层负责无线信号的发送和接收。
三、无线网络传感器节点设计基于CC2530芯片和ZigBee协议栈,设计了一种低功耗的无线网络传感器节点。
该节点由CC2530芯片、传感器模块、电源管理模块和外设接口组成。
1. CC2530芯片:作为无线SoC芯片,CC2530芯片集成了8051微控制器核心和无线收发器。
8051微控制器核心负责控制节点的各种操作,如数据采集、数据处理和通信控制。
无线收发器负责与其他节点进行通信,通过ZigBee协议栈实现数据的传输和接收。
2. 传感器模块:传感器模块负责实时监测环境中的各种参数,如温度、湿度、光照等。
通过与CC2530芯片的接口进行数据传输,将采集到的数据传送给CC2530芯片进行处理和分析。
基于CC2530的ZigBee无线组网温度监测系统的设计麦军;邓巧茵;万智萍【摘要】Temperature has a very important impact on life, temperature changinginformation must bemonitoring in real-time. This design uses CC2530 chip as the processor plus CC2591 RF front-end consisting of ZigBee protocol for wireless networks;using DHT11 temperature sensor to collected temperature information and analyzed by LPC1114 chip; the main module receives each node transmits temperature data and then transmitted to PCvia RS232 serial port, PC analysis temperature information and then interact data in the form of chart, enabling users to predicted the changes in temperature trends.%温度对生活有着极其重要的影响,实时监测温度信息的变化成为必须.本设计使用CC2530芯片作处理器加上射频前端CC2591组成ZigBee协议的无线网络通信模块; 使用DHT11温度传感器采集到的温度信息通过LPC1114芯片进行采集并分析;主模块接收各个节点传送回来的温度数据,通过RS232串口传送到上位机,上位机对温度信息进行分析然后把数据以图表的形式进行交互,方便用户查看温度的变化还可预测温度趋势.【期刊名称】《电子设计工程》【年(卷),期】2015(023)022【总页数】5页(P117-121)【关键词】CC2530芯片;ZigBee技术;LPC1114芯片;DHT11温度传感器;实时温度监测【作者】麦军;邓巧茵;万智萍【作者单位】中山大学新华学院信息科学系, 广东广州 510520;中山大学新华学院信息科学系, 广东广州 510520;中山大学新华学院信息科学系, 广东广州510520【正文语种】中文【中图分类】TN919现代生产、生活都与温度息息相关,温度作为人们日常生活指标,影响着人们的行为活动,根据温度高低的不同继而进行应对,温度也影响着各种生命资源的存在,温度是构成地球上多种多样生命的重要因素之一。
基于CC2530的ZigBee数据采集系统设计一、概述随着物联网技术的快速发展,无线通信技术在数据采集领域的应用日益广泛。
ZigBee作为一种低功耗、低成本、短距离无线通信技术,在智能家居、工业自动化、环境监测等领域具有广泛的应用前景。
基于CC2530的ZigBee数据采集系统,充分利用了ZigBee技术的优势,实现了高效、稳定的数据采集与传输功能。
本系统以CC2530芯片为核心,构建了一个完整的ZigBee无线通信网络。
CC2530芯片是德州仪器(TI)公司推出的一款基于8051内核的无线单片机,具有高性能、低功耗的特点。
通过CC2530芯片,系统可以实现数据的采集、处理、传输以及网络管理等功能。
在数据采集方面,系统通过外接传感器实现对温度、湿度、光照等环境参数的实时监测。
传感器采集到的数据经过CC2530芯片处理后,通过ZigBee网络传输至协调器节点,再由协调器节点将数据上传至上位机或云端服务器进行进一步的分析和处理。
本系统还具备网络管理功能,可以对ZigBee网络进行配置、监控和维护。
通过上位机软件,用户可以实时查看网络状态、节点信息以及采集到的数据,并进行相应的操作和管理。
基于CC2530的ZigBee数据采集系统以其高效、稳定、低功耗的特点,在物联网领域具有广泛的应用价值。
本文将对系统的硬件设计、软件编程以及实现过程进行详细阐述,为相关领域的研究和实践提供有益的参考。
1. ZigBee技术概述《基于CC2530的ZigBee数据采集系统设计》文章“ ZigBee技术概述”段落内容ZigBee技术是一种专为短距离、低速率无线通信设计的协议,它基于IEEE 4标准,具有低功耗、低成本、高可靠性及高安全性等特点。
该技术最初被称为“HomeRF Lite”和“FireFly”,后统一命名为ZigBee,其命名灵感来源于蜜蜂通过Z字形飞行交流食物源信息的自然现象。
ZigBee技术广泛应用于智能家居、工业自动化、农业智能化等领域,在这些领域中,ZigBee技术以其独特的优势,为数据采集和传输提供了高效的解决方案。
(一)ZigBee通过超声波传感器水深采集
本模块主要实现通过单个zigbee终端节点驱动超声波模块采集液位深度信息回传到PC机上显示。
2530介绍
本创新项目使用的Zigbee芯片为CC2530,它集成了业界领先的高性能RF 收发器、增强型工业标准的8051微控制器,具有接收灵敏度高和抗干扰性强的特点。
CC2530根据需要有四种不同FLash版本:CC2530F32/64/128/256,本次选择Flash为256K的片子。
它具有多种运行模式以及短的模式切换时间,保证了其超低功耗的特点。
CC2530的结构大致可以分为三块:CPU和存储模块、电源时钟及外部设备模块、无线模块(图1-1为CC2530最小系统)。
主要特点如下:
(1).高性能、低功耗的8051微控制器内核;
(2).适应2.4 GHz IEEE 802.15.4的RF收发器;
(3).电源电压范围宽(2.0~3.6 V);
(4).看门狗、电池监视器和温度传感器;
(5).具有8路输入8~14位ADC;
(6).2个支持多种串行通信协议的USART, 1个红外发生电路;
(7).个通用的16位和2个8位定时器;
(8).高级加密标准(AES)协处理器;
(9).1个通用I/O 引脚,2个具有20 mA的电流吸收或电流
供给能力;
(10).小尺寸QLP-40封装,6 mm×6 mm。
图2-1CC2530最小系统
2超声波测距模块简介
超声波模块使用的是US-100,本模块可实现2cm~4.5m的非接触测距功能,拥有2.4~5.5V的宽电压输入范围,静态功耗低于2mA,自带温度传感器对测距结果进行校正,同时具有GPIO,串口等多种通信方式,内带看门狗,工作稳定可靠。
主要技术参数:
超声波测距系统通过zigbee模块的cc2530芯片向通过串口超声波探头的引脚TX发送一个0x55的指令,超声波探头发射超声波,超声波向前传播。
当超声
波遇到障碍物时会反射回来,进行相关数据处理,RX引脚输出,将测得的距离的数据发送给zigbee模块。
为了验证测得数据是否准确,我们通过串口将RX输出的数据进行显示(图2-1为实测图)。
图2-1串口测试超声波模块
本模块有两种测距方式:电平触发测距,串口触发测距。
我们选择的是串口触发测距方式。
在模块上电前,首先插上模式选择跳线上的跳线帽,使模块处于串口触发模式。
在此模式下只需要在Trig/TX管脚输入0X55(波特率9600),系统便可发出8个40KHZ的超声波脉冲,然后检测回波信号。
当检测到回波信号后,模块还要进行温度值的测量,然后根据当前温度对测距结果进行校正,将校正后的结果通过Echo/RX管脚输出。
输出的距离值共两个字节,第一个字节是距离的高8位(HDate),第二个字节为距离的低8位(LData),单位为毫米。
即距离值为
(HData*256 +LData)mm(图2-1为US-100超声波模块时序图,图2-2为超声波模块实物图)
图2-1 US-100超声波模块时序图
图2-2 超声波测距模块实物图
系统的设计思路 :
图2-3系统框图
3.实验测试代码程序
#include <ioCC2530.h>
#include <string.h>
#define uint unsigned int
#define uchar unsigned char
#define RX0 P0_2 超声波发射 超声波接收
Zigbee
控制器 输出数据 OLED 显示 键盘输入(待完善)
#define TX0 P0_3
//函数声明
void Delayms(uint xms); //延时函数
void InitUart(); //初始化串口
void UartSend_String(char *Data,int len);
char temp;
char flag=0;
int data1,data2,data;
char Txdata[5]; //存放数据
char str[5];
/****************************
延时函数
*****************************/
void Delayms(uint xms) //i=xms 即延时i毫秒 (16M晶振时候大约数,32M需要修改,系统不修改默认使用内部16M)
{
uint i,j;
for(i=xms;i>0;i--)
for(j=587;j>0;j--);
}
/**************************************************************** 串口初始化函数
***********************************************************/
void InitUart()
{
CLKCONCMD &= ~0x40; // 设置系统时钟源为 32MHZ晶振
while(CLKCONSTA & 0x40); // 等待晶振稳定 CLKCONCMD &= ~0x47; // 设置系统主时钟频率为 32MHZ
PERCFG = 0x00; //位置1 P0口
P0SEL = 0x3c; //P0_2,P0_3,P0_4,P0_5用作串口,第二功能
P2DIR &= ~0XC0; //P0 优先作为UART0 ,优先级
U0CSR |= 0x80; //UART 方式
U0GCR |= 8; //U0GCR与U0BAUD配合
U0BAUD |= 59; // 波特率设为115200
UTX0IF = 0; //UART0 TX 中断标志初始置位1 (收发时候) U0CSR |= 0X40; //允许接收
IEN0 |= 0x84; // 开总中断,接收中断
}
/***************************
//主函数
***************************/
void main(void)
{
InitUart();
while(1)
{
U0CSR &= ~0x40; //禁止接收
U0DBUF = 0x55;
while(UTX0IF == 0); //发送完成标志位
UTX0IF = 0;
U0CSR |= 0x40; //允许接收
while(!flag);
flag=0;
// U0DBUF=temp;
data1=temp*256;
// while(UTX0IF == 0); //发送完成标志位
// UTX0IF = 0;
while(!flag);
flag=0;
// U0DBUF=temp;
data2=data1+temp;
// while(UTX0IF == 0); //发送完成标志位
// UTX0IF = 0;
data=(int)data2;
str[0]=(char)(data/1000)+0x30;//十进制显示
str[1]=(char)(data/100%10)+0x30;
str[2]=(char)(data/10%10)+0x30;
str[3]=(char)(data%10)+0x30;
str[4]=32;
strcpy(Txdata,str); //将发送内容copy到Txdata;
UartSend_String(Txdata,5);//串口发送数据
Delayms(1000);
}
}
/**************************************************************** 串口接收一个字符: 一旦有数据从串口传至CC2530, 则进入中断,将接收到的数据赋值给变量temp.
****************************************************************/ #pragma vector = URX0_VECTOR
__interrupt void UART0_ISR(void)
{
URX0IF = 0; // 清中断标志
temp = U0DBUF;
flag=1;
}
/**************************************************************** 串口发送字符串函数
****************************************************************/ void UartSend_String(char *Data,int len)
{
int j;
for(j=0;j<len;j++)
{
U0DBUF = *Data++;
while(UTX0IF == 0);
UTX0IF = 0;
}
}
下图最终的测试实物图。