1.2 运动校核计算
1.2.1风窗玻璃刮水器运动学校合
根据国标《汽车风窗玻璃刮水器、洗涤器的性能要求及试验方法》(GB 15085-1994)对汽车设计后的风窗玻璃刮水器及洗涤器的实际情况进行校核。但由于尚未制造样车, 因此主要校合舒适, 雨刷区域和视野。
(1)引用标准
GB 11556 汽车风窗玻璃除霜系统的性能要求及其试验方法,按这标准进行三维CAD建模和运动学仿真,以便确定正确的转轴设计硬点.
(2)性能要求
a 刮水器的刮刷面积应覆盖A区域的98%以上,B区域的80%以上。
b 如果刮水器的绝大部分零配件在无实际样品的情况下无法校核各个物理指标,可以模拟某刮水器,或略去该标准(GB 15085-1994)对刮水器的各个物理指标(刮水器工作频率、强度及极端温度下工况等)的校核, 略去对风窗玻璃洗涤系统的校核,只对刮刷面积进行校核。
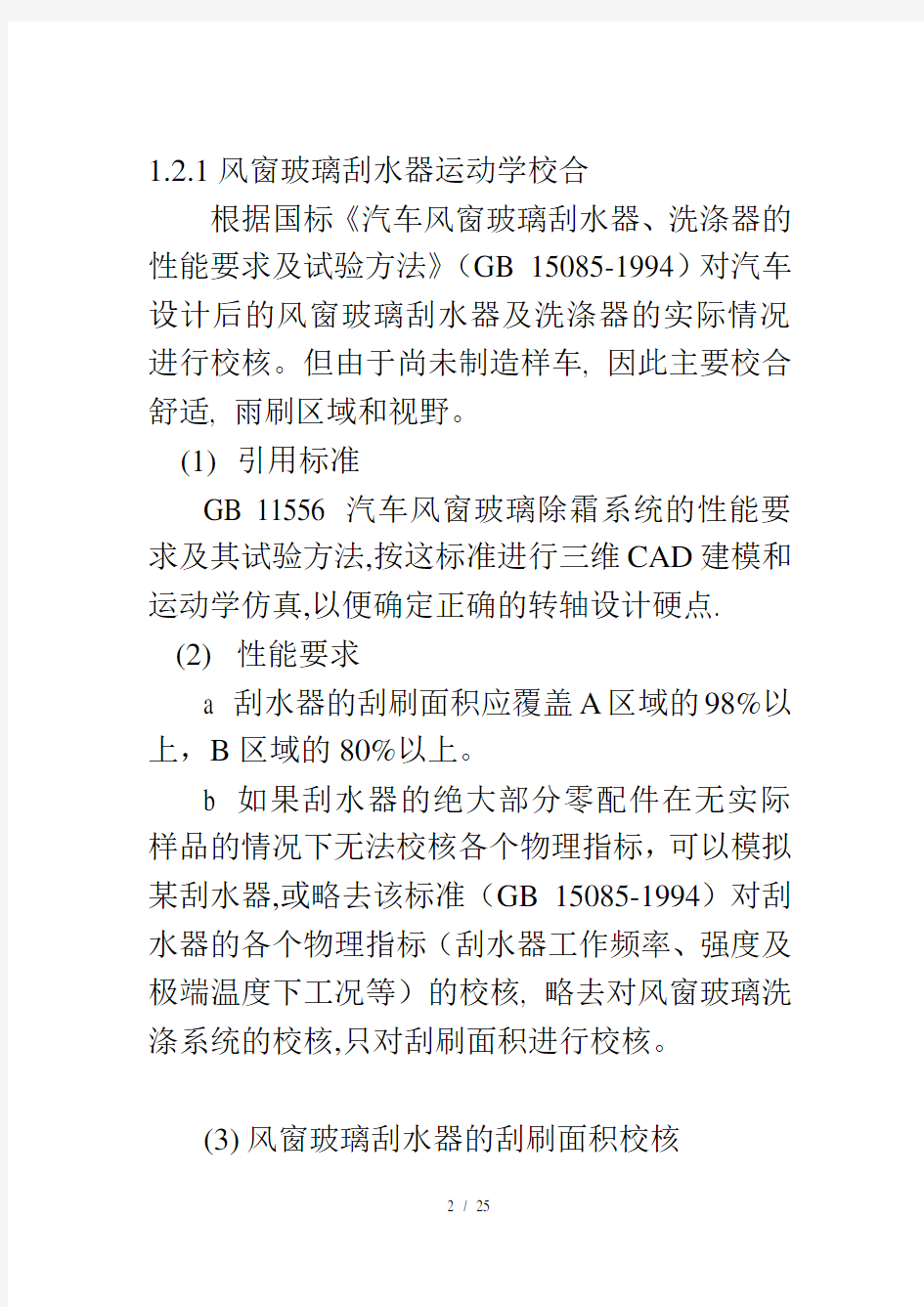
(3)风窗玻璃刮水器的刮刷面积校核
下面以一个例子说明,校合方法:
a 相关参数的简要说明:
A区域:A区域是下述从V点(即指V1和V2点,V1点和V2点分别为眼椭圆的上下边界点, 向前延伸的4个平面与风窗玻璃外表面相交的交线所封闭的面积。这4个平面是:(1)通过V1和V2点且在X轴的左侧与X轴成13°角的铅垂平面。
(2)通过V1点,与X轴成3°仰角且与Y轴平行的平面。
(3)通过V2点,与X轴成1°俯角且与Y轴平行的平面。
(4)通过V1和V2向X轴的右侧与X轴成20°角的铅垂平面。
B区域:B区域是指由下述4个平面所围成的风窗外表面的面积,且距风窗玻璃透明部分面积边缘向内至少25mm,以较小面积为准。
(1)通过V1点,与X轴成7°仰角且与Y轴平行的平面
(2)通过V2点,与X轴成5°俯角且与Y轴平行的平面。
(3)通过V1和V2点且在X轴的左侧与
X轴成17°角的铅垂平面。
(4)以汽车纵向中心平面为基准面,且与(3)所述平面对称的区域。
图1.2.1 A区域的确定简图
:
图1.1.2 B区域的确定简图
b 结论
对汽车风窗玻璃刮水器的刮片因玻璃弧度的变化。我们很可能将选用其它规格的刮片。通过对改进前后的AB区域比较发现,其面积的变化非常有限在更换刮片后,完全可以满足GB 15085-1994所规定的要求为止。
1.2.2 脚踏板布置与运动学校核
踏板布置校合的基本思想为:在保证驾驶员H点位置不变前提下,按照国标的有关要求进行布置和校合, 如满足不了时, 可以调整H点的位置, 总之要满足人机工程学要求.
图1.2.3 脚踏板的布置与运动学校合
如上附图所示:
按引用(GB/T17346-1998)内GB/T13054
客车驾驶区的推荐标准中说明,紧挨踏板左右侧向有碍于踏板操作的两障碍物在参考平面P上投影之间的最小距离要大于80mm。轿车可以少一些.
因此,为了使离合器踏板到新设计的轮包的最小距离符合标准,必需将离合器踏板在原来位置的基础上再向内移动。由于转向管柱略向前倾,所以离合器踏板同转向管柱是交错的,没有干涉问题的存在。可适当向内移一些,但要考虑驾驶舒适性.一般离合器踏板到侧边距离为40~80mm, 小车小一些, 到方向盘中心Y向距离为40~120mm,制动踏板离离合器踏板约为100~160mm, 油门踏板离制动踏板水平距离为60~120mm, 设计时可以参照同类车型尺寸.
1.2.3 上下车方便性运动学校核
(1) 本校核以《客车驾驶区尺寸》(GB/T 13053-1991)的相关规定对汽车的上下车实际情况进行校核。但并不包括GB/T 13053-1991中规定的其它校核项目。
(2)引用标准
GB/T 13054 客车驾驶区尺寸术语
GB/T 13057 客车驾驶员座椅尺寸规格
(3)性能要求
a 驾驶员门打开时,上部通道宽度A18大于650mm。
b 驾驶员门打开时,下部通道宽度A19大于250mm。
(4)对汽车初步设计后的上下车实际情况进行校核实例
a 说明:在校核中一般认为驾驶员门的最大开度为75°,并在此情况下校核。
b 改进后驾驶员门打开时,上部通道的实际宽度A18=840mm
图1.2.4上下车校核简图:(俯视图)
c 驾驶员门打开时,下部通道的实际宽度A19=258.7mm
(5)结论
a通过校核确认汽车的上下车实际情况要符合GB/T 13053-1991作出的相关规定。
b如果转向管柱的空间位置发生了较大变化,故在下面给出顶视图的其它两个方向的视图,用以说明转向管柱的空间位置。
图1.2.5 方向柱的布置侧视图
图1.2.6方向柱的布置俯视图
1.2.4 人体坐姿校核
(1) 说明:本校核以《客车驾驶区尺寸》
(GB/T 13053-1991)的相关规定为基础, 对驾驶员坐姿情况进行校核。
(2)引用标准
GB/T 13054 客车驾驶区尺寸术语
GB/T 13057 客车驾驶员座椅尺寸规格
(3)对人体坐姿实际情况进行校核
当汽车设计造型已经确定,并利用人体模型眼椭圆进行驾驶员前后方视野的校核后,还需利
用此模型进行驾驶区域内的尺寸校核。
在建立人体模型时,使人体模型乘坐基准点(R点)与座椅H点重合,人体模型尺寸取人体第95百分位数据。我们在进行驾驶区尺寸校核时,应取驾驶员座椅位于正常驾驶时的最后位置。此时,该人体模型在驾驶区内各相关参数如图1.2.7所示为布置实例:
由图可知,各参数如下:驾驶员座垫至顶盖高H11=1053.8(标准为≥1000); G点至制动器及离合器踏板中心距离A11=830.1(标准为800~900) ; G点至油门踏板中心距离A12=892.6(标准为900~1000); G点至前围护板距离L11=937.3(标准为≥1050);G点至仪表板距离L12=713.9(标准为650~750); 转向盘倾角α11=57.4°(标准为55°~75°); 转向盘下缘最低点至座垫上表面距离H13=234.5(标准为180~240); 转向盘外缘至仪表板最小距离A13=85 (标准为≥80); 转向盘下缘最低点至离合器踏板中心距离A14=501.4(标准为≥600);
G点至风窗下缘距离L14=1025.7(标准为≥1060);人体大小腿间夹角α=95°(标准为≥87°).
图1.2.8人体坐姿校核
(4)结论
如上人体校核实例, 驾驶员坐姿际情况,我们认为以上数据基本在国标规定范围内,即在人体坐姿满足乘坐要求的情况下,各操纵控制件以及各踏板的布置均在该人体模型手臂覆盖范围内及脚步覆盖范围内,各仪表均在人体模型视野所及范围内。由此可知,本车总布置驾驶区内尺寸基本满足国标要求,即符合GB/T 13053-1991作出的相关规定。
1.2.5轴荷重新分配计算与校核
根据主要零部件质量及坐标计算重心在水平方向上距前轴的距离为a, 在水平方向上距后轴的距离为b 及重心高度h , 1995年后, 由于设计三维CAD 软件的大量应用可以更精确的确定整车质量参数.
1.2.6转弯半径计算与比较。
根椐设计左右车轮的转向角设计数据或初定的参数,如轴距为1840mm, 转弯时前外轮的最大转向角为28°
则汽车的最小转弯半径为:
根据汽车理论公式: = (1.2.1)
=
=3919.300(mm)
min R )
sin(max L min R 。
28sin 1840min
R
1.2.7转向系统设计运动学校核
(1)结构布置方案
为了总布置的需要,转向梯形机构应合理的设计梯形机构。因此,按照整车总布置需要要校核转向与悬架运动情况,以便确定前悬架的结构形式, 见下图:
减振器
螺旋弹簧
转向器支架
下摆臂副车架
拉力杆
图1.2.9悬架及转向系统设计和校核
(2) 设计和校核内容
选用转向节,转向节臂长度应优化,球销孔的位置也作优化,确保安装后主销下支点的位置正确,梯形底角符合转向梯形理论。
a 优化前减振器、螺旋弹簧,按汽车前轴载荷重新校核减振器的阻尼及螺旋弹簧的刚度,对减振器和螺旋弹簧进行匹配计算和优化设计。
b 沿用或参考一些同类产品的下摆臂或重新设计。
图1.2.11 副车架设计控制硬点
c 根据吸能纵梁在空间的布置、转向器的位置和摆臂控制硬点的确定,副车架的结构也基本确定。见图1.2.10:
通过上下跳动的定位参数的变化曲线比较,并要校核与转向系的干涉, 一般转向干涉角为负前束-0.2~ -1.1度. 以此来设计和优化转向齿条断开点位置和转向横拉杆在Z 轴方向的布置.在三维软件下优化设计这一结构比较容易.
1.2.8制动力匹配校核
(1)、基本理论公式
a 制动器制动力前后分配系数
β=F μ1/ F μ
F μ1——前制动器制动力
F μ——汽车总制动器制动力
F μ=F μ1+F μ2
F μ2——后制动器制动力
b 前、后车轮的法向反作用力
在分析前、后轮制动器制动力分配比例以前,首先了解地面作用于前、后车轮的法向反作用力
图1.2.12 制动力分配计算
如图1.2.12所示。
Fz1=G(b+φh g)/L (1.2.2)
Fz2=G (a-φh g) /L (1.2.3)
式中:
Fz1——地面对前轮的法向反作用力
Fz2——地面对后轮的法向反作用力
G——汽车重力(满载总质量与重力加速度乘积)
a——汽车质心至前轴的距离
b——汽车质心至后轴的距离
h g——汽车质心高度
φ——附着系数
L——轴距(a+b)
(2)、理想的前后制动器制动力分配曲线 F μ1+F μ2=ΦG (1.2.4) F μ1=ΦFz1 (1.2.5) F μ2=ΦFz2 (1.2.6)
(3) 同步附着系数Φ0
Φ0=(L β-b )/hg (1.2.7)
(4) 前、后轮制动器制动力矩的确定
首先选定同步附着系数φ0,并用下列计算前、后轮制动力矩的比值。然后,根据汽车满载在柏油、混凝土路面上紧急制动到前轮抱死,计算出前轮制动器的最大制动力矩M μ1max ;在根据前、后轮制动力矩的比值计算出后轮制动器的最大制动力矩M μ2max 。
(1.2.8)
(5) 应急制动和驻车制动所需的制动力矩 a)、应急制动
应急制动时,后轮一般将抱死滑移,故后桥制动力为:
F B2=F Z2φ=Ga/(L +φh g )φ (1.2.9) 后桥所需的的制动力矩为:
M μ1
M μ2=b φ0h g a φ0h g
F B2r e=Ga/(L+φh g)φre (1.2.10)
r e——为车轮有效半径
如用后轮作为紧急制动器,则单个后轮制动
器的应急制动力矩为F B2r e/2。
图1.2.12 坡道驻车制动
b)、驻车制动
由汽车在上坡路上停驻的受力情况,可以得
出后桥的附着力为:
F B2=Gφ(acosα/L+h g sinα/L)
(1.2.11)
汽车在下坡路上停驻时的后桥附着力为:
F B2ˊ=Gφ(acosα/L-h g sinα/L)
(1.2.12)
,可根据后桥上的汽车停驻的极限上坡角α
1
附着力与制动力相等的条件求得:
F B2=Gφ(acosα/L+h g sinα/L)=Gsinα1
(1.2.13)
α
1=arctanφa/(L-φh
g
) (1.2.14)
同理可求得汽车可能停驻的极限下坡角:
α
1ˊ=arctanφa/(L+φh
g
) (1.2.15)
(6) 一种汽车计算实例
某汽车车型制动系计算
基本参数:
整车整备质量:830Kg
空载时前轴载荷:440Kg
空载时后轴载荷:390Kg
整车满载质量:1410 Kg
轴距:1840mm
满载时前轴载荷:582.598Kg
满载时后轴载荷:827.402Kg
质心至前轴距离:a=1079.730mm(满载时)质心至后轴距离:b=760.270 mm(满载时)质心高度:hg=790(满载时) ,hg=820(空载时)
计算常数(子午线轮胎)F=3.05
车轮自由直径:d=556
滚动半径:r e=F×d/2π=269.89
目录 1.概述.......................................... 错误!未定义书签。 2.1号标杆车轿车前悬架跳动校核.................... 错误!未定义书签。 2.1前悬架运动校核的有关参数 .................................... 错误!未定义书签。 2.2 前悬架跳动包络图.................................................. 错误!未定义书签。 2.3 前悬架包络与轮罩等的间隙校核............................. 错误!未定义书签。 2.4 前悬架摆臂与副车架间隙校核 ................................ 错误!未定义书签。 3.1号标杆车轿车后悬架跳动校核.................... 错误!未定义书签。 3.1 1号标杆车轿车后悬架跳动量 ................................. 错误!未定义书签。 3.2 1号标杆车轿车后悬架跳动包络图 .......................... 错误!未定义书签。 3.3 1号标杆车轿车后悬架跳动包络与周边间隙............ 错误!未定义书签。 4.前后悬架螺旋弹簧长度校核....................... 错误!未定义书签。 5.前、后减振器长度校核........................... 错误!未定义书签。 5.1 前减振器校核......................................................... 错误!未定义书签。 5.2 后减振器校核......................................................... 错误!未定义书签。 6.总结 ......................................... 错误!未定义书签。 参考文献 .................................. 错误!未定义书签。 1.概述 悬架是汽车上的重要总成,在汽车行驶过程中,悬架系统因载荷及路面变化 总是处于不断的变化之中,因此在进行总布置设计时,必须对悬架的运动进行校核,防止发生运动干涉。此校核的目的是确定悬架运动至极限位置时占用的空间(对于前悬架应同时考虑上跳、下跳及转向至极限位置时的情况),从而检查悬架 与轮罩、纵梁、副车架等之间的间隙是否足够,同时检查悬架系统内部在变化过 程中是否存在干涉现象。 下面分别对1号标杆车轿车前、后悬架跳动情况进行分析,对其空间布置情 况进行校核。 2.1号标杆车前悬架跳动校核 1号标杆车轿车前悬架为麦弗逊式独立悬架,驱动方式为发动机前横置、前 驱动,前轮既是转向轮,又是驱动轮。因此,在进行前悬架运动校核时,必须同 时考虑转向、悬架变形两个方面的综合作用。 2.1前悬架运动校核的有关参数 根据前悬架的空间位置及转向器的设计行程(设计行程为152mm),可得1 号标杆车轿车的悬架运动包络图。前悬架的上跳极限按橡胶限位块压缩1/2计算,得出1号标杆车轿车前悬架上跳最大行程38.7mm,即前悬架从满载状态向上最
汽车悬挂系统结构原理图解 系统结构, 汽车, 原理, 图解, 悬挂 汽车悬挂系统结构原理图解教程 什么是悬挂系统 舒适性是轿车最重要的使用性能之一。舒适性与车身的固有振动特性有关,而车身的固有振动特性又与悬架的特性相关。所以,汽车悬架是保证乘坐舒适性的重要部件。同时,汽车悬架做为车架(或车身)与车轴(或车轮)之间作连接的传力机件,又是保证汽车行驶安全的重要部件。因此,汽车悬架往往列为重要部件编入轿车的技术规格表,作为衡量轿车质量的指标之 一。 汽车车架(或车身)若直接安装于车桥(或车轮)上,由于道路不平,由于地面冲击使货物和人会感到十分不舒服,这是因为没有悬架装置的原因。汽车悬架是车架(或车身)与车轴(或车轮)之间的弹性联结装置的统称。它的作用是弹性地连接车桥和车架(或车身),缓和行驶中车辆受到的冲击力。保证货物完好和人员舒适;衰减由于弹性系统引进的振动,使汽车行驶中保持稳定的姿势,改善操纵稳定性;同时悬
架系统承担着传递垂直反力,纵向反力(牵引力和制动力)和侧向反力以及这些力所造成的力矩作用到车架(或车身)上,以保证汽车行驶平顺;并且当车轮相对车架跳动时,特别在转向时,车轮运动轨迹要符合一定的要求,因此悬架还起使车轮按一定轨迹相对 车身跳动的导向作用。 悬架结构形式和性能参数的选择合理与否,直接对汽车行驶平顺性、操纵稳定性和舒适性有很大的影响。由此可见悬架系统在现代汽车上是重要的总成之 一。
一般悬架由弹性元件、导向机构、减振器和横向稳定杆组成。弹性元件用来承受并传递垂直载荷,缓和由于路面不平引起的对车身的冲击。弹性元件种类包括钢板弹簧、螺旋弹簧、扭杆弹簧、油气弹簧、空气弹簧和橡胶弹簧。减振器用来衰减由于弹性系统引起的振,减振器的类型有筒式减振器,阻力可调式新式减振器,充气式减振器。导向机构用来传递车轮与
课程设计 题目汽车运动控制系统仿真设计学院计算机科学与信息工程学院班级2010级自动化班 姜木北:2010133*** 小组成员 指导教师吴
2013 年12 月13 日 汽车运动控制系统仿真设计 10级自动化2班姜鹏 2010133234 目录 摘要 (3) 一、课设目的 (4) 二、控制对象分析 (4) 2.1、控制设计对象结构示意图 (4) 2.2、机构特征 (4) 三、课设设计要求 (4) 四、控制器设计过程和控制方案 (5) 4.1、系统建模 (5) 4.2、系统的开环阶跃响应 (5) 4.3、PID控制器的设计 (6) 4.3.1比例(P)控制器的设计 (7) 4.3.2比例积分(PI)控制器设计 (9) 4.3.3比例积分微分(PID)控制器设计 (10) 五、Simulink控制系统仿真设计及其PID参数整定 (11) 5.1利用Simulink对于传递函数的系统仿真 (11) 5.1.1 输入为600N时,KP=600、KI=100、KD=100 (12) 5.1.2输入为600N时,KP=700、KI=100、KD=100 (12) 5.2 PID参数整定的设计过程 (13) 5.2.1未加校正装置的系统阶跃响应: (13) 5.2.2 PID校正装置设计 (14) 六、收获和体会 (14) 参考文献 (15)
摘要 本课题以汽车运动控制系统的设计为应用背景,利用MATLAB语言对其进行设计与仿真.首先对汽车的运动原理进行分析,建立控制系统模型,确定期望的静态指标稳态误差和动态指标搬调量和上升时间,最终应用MATLAB环境下的.m 文件来实现汽车运动控制系统的设计。其中.m文件用step函数语句来绘制阶跃响应曲线,根据曲线中指标的变化进行P、PI、PID校正;同时对其控制系统建立Simulink进行仿真且进行PID参数整定。仿真结果表明,参数PID控制能使系统达到满意的控制效果,对进一步应用研究具有参考价值,是汽车运动控制系统设计的优秀手段之一。 关键词:运动控制系统 PID仿真稳态误差最大超调量
南京工程学院 课程设计说明书 题目汽车运动控制系统的 / 设计与仿真 课程名称MATLAB 的控制系统 院(系、部、中心) 专业) 班级 学生姓名 学号 设计时间 ? 设计地点基础实验楼B114 指导教师 \
2012年1月南京 目录 一、课设目的 (3) ^ 二、控制对象分析 (3) 、控制设计对象结构示意图 (3) 、机构特征 (3) 三、课设设计要求 (4) 四、控制器设计过程和控制方案 (4) 、系统建模 (4) 、PID控制器的设计 (4) 五、控制系统仿真结构图 (5) — 六、仿真结果及指标 (6) 对于二阶传递函数的系统仿真 (6) 输入为500N时,K P=700、K I=100、K D=100。 (6) 输入为50N时,K P=700、K I=100、K D=100 (7) PID校正的设计过程 (7) 未加校正装置的系统阶跃响应: (7) PID校正装置设计 (8)
七、收获和体会 (9) >
Matlab 与控制系统仿真设计 一、课设目的 针对具体的设计对象进行数学建模,然后运用经典控制理论知 识 设计控制器,并应用Matlab 进行仿真分析。通过本次课程设计,建立理论知识与实体对象之间的联系,加深和巩固所学的控制理论知识,增加工程实践能力。 二、控制对象分析 、控制设计对象结构示意图 : 图1. 汽车运动示意图 、机构特征 汽车运动控制系统如图1所示。忽略车轮的转动惯量,且假定汽 车受到的摩擦阻力大小与运动速度成正比,方向与汽车运动方向相反。 根据牛顿运动定律,该系统的模型表示为: ?? ?==+v y u bv v m (1) 其中,u 为汽车驱动力(系统输入),m 为汽车质量,b 为摩擦阻 力与运动速度之间的比例系数,v 为汽车速度(系统输出),v 为汽车加速度。 假定kg m 1000=,m s N b /50?=,N u 500=。
大学生方程式赛车悬架系统设计 中国大学生方程式汽车大赛,在XX年开始举办,至XX 年已举办三届,大赛目的是为了提高大学生汽车设计与团队协作等能力,而华南农业大学XX年才组队设计赛车,现在还没有派队参加比赛,本文初步探讨SAE赛车悬架设计的方案,为日后华南农业大学参赛打下基础。 本课题的重点和难点 1、根据整车的布置对FSAE赛车悬架的结构形式进行的选择。 2、对前后悬架的主要参数和导向机构进行初步的设计。 3、用Catia或Proe建立悬架三维实体模型。 4、在Adams/car中建立该悬架的虚拟样机模型,进行仿真,分析其运动学性能。 5、悬架设计方案确定后的优化改良。优化的方案一:用ADAMS/Insight进行优化,以车轮的定位参数优化目标,以上下横臂与车架的铰接点为设计变量进行优化。优化的方案二:轻量化,使用Ansys软件进行模拟悬架工作状况,进行受力分析,强度校核,优化个部件结构,受力情况。 1、查阅FSAE悬架的设计。 2、运用Pro/E或者Catia进行零件设计和仿真建模,设计出悬架的雏形。 3、在Adams/car中建立该悬架的虚拟样机模型,进行仿真,分析其运动学性能。 4、用ADAMS/Insight进行优化,改善操纵稳定性。
5、使用Ansys软件进行模拟悬架工作状况,进行受力分析,优化个部件结构及轻量化。 悬架设计流程如下: 首先要确定赛车主要框架参数,包括:外形尺寸、重量、发动机马力等等。 确定悬架系统类型,一般都会选用双横臂式,主要是决定选用拉杆还是推杆。 确定赛车的偏频和赛车前后偏频比。 估计簧上质量和簧下质量的四个车轮独立负重。 根据上面几个参数推算出赛车的悬架刚度和弹簧的弹性系数。 推算出赛车在没有安装防侧倾杆之前的悬架刚度初值,并计算车轮在最大负重情况下的轮胎变形。 计算没安装防侧倾杆时赛车的横向负载转移分布。 根据上面计算数值,选择防侧倾杆以获得预想的侧倾刚度和 LLTD。最后确定减振器阻尼率。 上面计算和选型完成后,再重新对初值进行校核。 运用Pro/E或者Catia进行零件设计和仿真建模,设计出悬架的雏形。在Adams/car中建立该悬架的虚拟样机模型,进行仿真,分析其运动学性能,并用ADAMS/Insight进行优化分析。 使用Ansys软件进行模拟悬架工作状况,进行受力分析,
汽车悬挂系统结构原理图解 Post by:2010-10-419:48:00 什么是悬挂系统 舒适性是轿车最重要的使用性能之一。舒适性与车身的固有振动特性有关,而车身的固有振动特性又与悬架的特性相关。所以,汽车悬架是保证乘坐舒适性的重要部件。同时,汽车悬架做为车架(或车身)与车轴(或车轮)之间作连接的传力机件,又是保证汽车行驶安全的重要部件。因此,汽车悬架往往列为重要部件编入轿车的技术规格表,作为衡量轿车质量的指标之一。 汽车车架(或车身)若直接安装于车桥(或车轮)上,由于道路不平,由于地面冲击使货物和人会感到十分不舒服,这是因为没有悬架装置的原因。汽车悬架是车架(或车身)与车轴(或车轮)之间的弹性联结装置的统称。它的作用是弹性地连接车桥和车架(或车身),缓和行驶中车辆受到的冲击力。保证货物完好和人员舒适;衰减由于弹性系统引进的振动,使汽车行驶中保持稳定的姿势,改善操纵稳定性;同时悬架系统承担着传递垂直反力,纵向反力(牵引力和制动力)和侧向反力以及这些力所造成的力矩作用到车架(或车身)上,以保证汽车行驶平顺;并且当车轮相对车架跳动时,特别在转向时,车轮运动轨迹要符合一定的要求,因此悬架还起使车轮按一定轨迹相对车身跳动的导向作用。 悬架结构形式和性能参数的选择合理与否,直接对汽车行驶平顺性、操纵稳定性和舒适性有很大的影响。由此可见悬架系统在现代汽车上是重要的总成之一。
一般悬架由弹性元件、导向机构、减振器和横向稳定杆组成。弹性元件用来承受并传递垂直载荷,缓和由于路面不平引起的对车身的冲击。弹性元件种类包括钢板弹簧、螺旋弹簧、扭杆弹簧、油气弹簧、空气弹簧和橡胶弹簧。减振器用来衰减由于弹性系统引起的振动,减振器的类型有筒式减振器,阻力可调式新式减振器,充气式减振器。导向机构用来传递车轮与车身间的力和力矩,同时保持车轮按一定运动轨迹相对车身跳动,通常导向机构由控制摆臂式杆件组成。种类有单杆式或多连杆式的。钢板弹簧作为弹性元件时,可不另设导向机构,它本身兼起导向作用。有些轿车和客车上,为防止车身在转向等情况下发生过大的横向倾斜,在悬架系统中加设横向稳定杆,目的是提高横向刚度,使汽车具有不足转向特性,改善汽车的操纵稳定性和行驶平顺性。 悬挂系统的分类 现代汽车悬架的发展十分快,不断出现,崭新的悬架装置。按控制形式不同分为被动式悬架和主动式悬架。目前多数汽车上都采用被动悬架,如下图所示,也就是汽车姿态(状态)只能被动地取决于路面及行驶状况和汽车的弹性元件,导向机构以及减振器这些机械零件。20世纪80年代以来主动悬架开始在一部分汽车上应用,并且目前还在进一步研究和开发中。主动悬架可以能动地控制垂直振动及其车 身姿态,根据路面和行驶工况自动调整悬架刚度和阻尼。
第一章悬架系统运动校核 第一节概述 悬架是现代汽车上的重要的大总成之一,他把车身(或车架)与车轮(或车轴)弹性的连接起来。它的主要作用是传递作用在车轮和车身(或车架)之间的力和力矩;缓和路面传递给车身(或车架)的冲击载荷。衰减由此给乘员或货物的震动,提高汽车的平顺性;保证汽车在不平路面上或载荷变化时有良好的运动特性,保证汽车操纵稳定性,使汽车有良好的高速行驶能力。 发动机前置前轮驱动的乘用车(轿车或MPV),常采用麦弗逊式前悬架和拖曳臂或扭力梁后悬架。 发动机中置后轮驱动的微型客车或微型货车,常采用麦弗逊式前悬架,钢板弹簧和整体车桥式后悬架。 第二节悬架运动校核 在汽车的行驶过程中,在车辆跳动极限和转向极限范围内,悬架运动件之间不能产生干涉,且保持一定的间隙,以保证汽车行驶的安全性及操纵稳定性。 悬架运动校核术语的定义: 1、前悬架上跳极限 前悬架上跳极限是指前限位块压缩1/2~2/3时的状态为准。轿车、小型客车推荐取1/2,SUV推荐取2/3。 2、前悬架下跳极限 前悬架下跳极限是指前减震器活塞杆拉出最长长度0~1mm位置时的状态,其中所加的0~1mm为减震器活塞杆固定橡胶块在非悬挂质量作用下向下的变形量。 3、后悬架上跳极限 后悬架上跳极限是指后限位块压缩1/2~2/3时的状态为准。轿车、小型客车推荐取1/2,SUV推荐取2/3。 4、后悬架下跳极限 后悬架下跳极限是指后减震器活塞杆拉出最长长度0~2mm位置时的状态,其中所加的0~2mm为减震器活塞杆固定橡胶块在非悬挂质量作用下向下的变形量。 5、左转极限 左转极限是指方向盘逆时针旋转至极限位置时,悬架所在位置。 6、右转极限 右转极限是指方向盘顺时针旋转至极限位置时,悬架所在位置。 下面已某轿车为例说明悬架运动校核的方法: 麦弗逊式前悬架(如图1所示)运动校核主要是分析悬架在上跳左转极限、上跳右转极
详解汽车悬挂系统
结构稳定优势突出详解多连杆独立悬挂 曾几何时,结构复杂、成本高昂的多连杆式独立悬架还只应用于豪华轿车,而随着近些年汽车制造技术的不断提升,零部件单位生产成本逐步降低,这种悬挂已广泛应用于中级车型和一些强调操控性的紧凑车型上,相比传统麦弗逊式和拖拽臂式,其结构上的优势是显而易见的。
追根溯源一下,最早应用多连杆悬挂的应该是这款1979年下线的奔驰S-Class W126车型 没有像麦弗逊,整体桥等结构渊源的发展历史。多连杆结构的盛行只是近这二、三十年的事,追溯一下,最早使用这种悬挂形式的量产车的是奔驰的S-Class W126车系,但在当时,这种悬挂形式还处于萌芽阶段,结构相对简单,因此很多人会认为它是“双叉臂结构”的变种,因为它的外观结构甚至特性与双叉臂系统非常相近,但后来推出的多连杆形式不断地出现四连杆,甚至五连杆,人们才发现这种结构具有很高的可塑性和延展性,而结构也越来越复杂。 ■多连杆悬挂的工作结果是由各个连杆共同作用的组合而成
顾名思义,多连杆式悬挂就是指由三根或三根以上连杆拉杆构成的悬挂结构,以提供多个方向的控制力,使车轮具有更加可靠的行驶轨迹。常见的有三连杆、四连杆、五连杆等。但由于三连杆结构已不能满足人们对于底盘操控性能的更高追求。因此结构更为精确、定位更加准确的四连杆式和五连杆式悬架才能称得上是真正的多连杆式,这两种悬架结构通常应用于前轮和后轮。
在结构上以常见的五连杆式后悬挂为例,其五根连杆分别为:主控制臂、前置定位臂、后置定位臂、上臂和下臂。它们分别对各个方向产生作用力。比如,当车辆进行左转弯时,后车轮的位移方向正好与前转向轮相反,如果位移过大则会使车身失去稳定性,摇摆不定。此时,前后置定位臂的作用就开始显现,它们主要对后轮的前束角进行约束,使其在可控范围内;相反,由于后轮的前束角被约束在可控范围内,如果后轮外倾角过大则会使车辆的横向稳定性减低,所以在多连杆悬架中增加了对车轮上下进行约束的控制臂,一方面是更好的使车轮定位,另一方面则使悬架的可靠性和韧性进一步提高。
中国汽车赛车运动文化节初步方案 一、活动宗旨 随着中国汽车市场的快速发展,汽车逐渐进入家庭市场,汽车消费也逐渐成为老百姓现实和潜在的消费支出,尽快成为有车一族已成为大众消费者或远或近的梦想。 本届活动旨在:提高教育文化、开展汽车下乡消费活动、促进经济繁荣、普及汽车知识、传播汽车文化、塑造城市形象、扩大学院影响、培育汽车人才。 活动期间将在汽车文化节这一平台下开展系列活动,车展与文化活动相结合。车展专业卖场的商业展出与系列汽车文化活动的互动性、平民参与性相得益彰,让汽车文化节成为精神文明的载体、老百姓的节日。 二、活动名称、时间及地点 1. 活动名称:第二届齐齐哈尔汽车文化节 2. 活动时间:2009年7月25日—27日 3. 活动地点:齐齐哈尔职业学院 4. 主办单位:齐齐哈尔职业学院齐齐哈尔东亚汽车销售有限公司 协办单位:齐齐哈尔汽车产业协会齐齐哈尔汽车运动俱乐部 “天路心驰”汽车协会汽车爱好者协会 0452e网民论坛 三、组织机构 组委会负责人: 金宇齐齐哈尔职业学院交通工程系负责人 纪春辉齐齐哈尔汽车产业协会负责人 富亮齐齐哈尔汽车运动俱乐部负责人
孙伶俐齐齐哈尔职业学院交通工程系对外负责人 张丽静“天路心驰”汽车协会负责人 胡冰心“天路心驰”汽车协会负责人 李龙汽车爱好者协会负责人 四、主要活动内容 1. 齐齐哈尔职业学院汽车展览会(教育促销专场) 本地车商悉数参展名车佳丽精品荟萃 现场活动精彩纷呈车坛盛会万众瞩目 2.车模大奖赛 汽车模特大赛作为车展传统项目一直以来便是车展整体中不可或缺的一道亮丽的风景线,本次大赛将植入赞助企业的品牌理念,以及成熟的市场化操作模式来举办。 3. 我的精彩汽车生活——车标设计大赛 城市,让生活更美好;汽车,让生活更精彩!一路有车相伴,分享你的汽车故事。征集人与车的精彩美丽瞬间。 4. 2009第二届齐齐哈尔汽车文化节娱乐表演 本次晚会体现高校学生当代大学生气息,爱国与奉献精神品质;反映汽车与时尚文化主题,推动齐齐哈尔市汽车市场的和谐繁荣发展,提高广大人民群众积极参与性。整体晚会以文艺表演为主要形式。 5.“新车试乘试驾”大体验 本届汽车文化节首次开展新车试乘试驾活动。由齐齐哈尔职业学院提供场地,汽车参展商提供试乘试驾车,为爱车一族提供新车亲密接触机会。 6.汽车特技表演
一、摘要 2 二、课程设计任务 3 1.问题描述 3 2.设计要求 3 三、课程设计内容 4 1、系统的模型表示 4 2、利用Matlab进行仿真设计 4 3、利用Simulink进行仿真设计 9 总结与体会 10 参考文献 10
本课题以汽车运动控制系统的设计为应用背景,利用MATLAB语言对其进行设计与仿真.首先对汽车的运动原理进行分析,建立控制系统模型,确定期望的静态指标稳态误差和动态指标搬调量和上升时间,最终应用MATLAB环境下的.m文件来实现汽车运动控制系统的设计。其中.m文件用step函数语句来绘制阶跃响应曲线,根据曲线中指标的变化进行P、PI、PID校正;同时对其控制系统建立Simulink进行仿真且进行PID参数整定。仿真结果表明,参数PID控制能使系统达到满意的控制效果,对进一步应用研究具有参考价值,是汽车运动控制系统设计的优秀手段之一。 关键词:运动控制系统 PID仿真稳态误差最大超调量
一、课程设计任务 1. 问题描述 如下图所示的汽车运动控制系统,设该系统中汽车车轮的转动惯量可以忽略不计,并且假定汽车受到的摩擦阻力大小与汽车的运动速度成正比,摩擦阻力的方向与汽车运动的方向相反,这样,该汽车运动控制系统可简化为一个简单的质量阻尼系统。 根据牛顿运动定律,质量阻尼系统的动态数学模型可表示为: ???==+v y u bv v m 系统的参数设定为:汽车质量m =1000kg , 比例系数b =50 N ·s/m , 汽车的驱动力u =500 N 。 根据控制系统的设计要求,当汽车的驱动力为500N 时,汽车将在5秒内达到10m/s 的最大速度。由于该系统为简单的运动控制系统,因此将系统设计成10%的最大超调量和2%的稳态误差。这样,该汽车运动控制系统的性能指标可以设定为: 上升时间:t r <5s ; 最大超调量:σ%<10%; 稳态误差:e ssp <2%。 2.设计要求 1.写出控制系统的数学模型。 2.求系统的开环阶跃响应。 3.PID 控制器的设计 (1)比例(P )控制器的设计 (2)比例积分(PI )控制器的设计 (3)比例积分微分(PID )控制器的设计 利用Simulink 进行仿真设计。 二、课程设计内容 1.系统的模型表示
悬架系统设计计算报告 目录 1 系统概述 (1) 1.1 系统设计说明 (1) 1.2 系统结构及组成 (1) 1.3 系统设计原理及规范 (2) 2 悬架系统设计的输入条件 (2) 3 系统计算及验证 (3) 3.1 前悬架位移与受力情况分析 (3) 3.2 后悬架位移与受力情况分析 (7) 3.3 悬架静挠度的计算 (10) 3.4 侧倾角刚度计算 (10) 3.5 侧倾角刚度校核 (13) 3.6 侧翻阀值校核 (15) 3.7 纵向稳定性校核 (15) 3.8 减震器参数的确定 (16) 4 总结 (18) 参考文献 (20)
1系统概述 1.1系统设计说明 悬架是汽车上重要总成之一,它传递汽车的力和力矩、缓和冲击、衰减振动,确保汽车必要的行驶平顺性和操纵稳定性。根据项目要求,需要对前后悬架的特征参数进行计算与较核,在确保悬架系统满足必要功能的同时,使悬架的各特征参数匹配合理,且校核其满足通用汽车的取值范围。 1.2系统结构及组成 该款车型前悬架采用麦弗逊式独立悬架,该悬架上端螺旋弹簧直接作用于前减振器筒体之上,与前减振器共同组成前支柱总成,一起传递汽车所受力和力矩,并衰减汽车的振动。下部三角形的摆臂通过橡胶衬套对称安装于副车架的两侧,通过副车架与车身牢固的连接在一起。前支柱与摆臂总成特定的匹配关系确保了整个悬架系统固有的使用特性,使其满足实际设计的各项要求,其结构简图如图1所示。 图1 前悬架结构形式 后悬架采用复合纵臂式半独立悬架,为经济型车型应用最为普遍的一种悬架结构,其显著特点是结构简单,成本低,使用可靠,侧倾性能优良。中间工字形的扭转梁在传递汽车所受纵向力的同时,也为后螺旋弹簧与减振器提供了必要的安装空间,同时通过自身的扭转刚度保证了后悬架具有优良的侧倾特性。扭转梁前安装点通过各向异性的橡胶衬套弹性的与车身相连,既具有良好的隔振性能又防止了汽车由于前后轴转向而产生的过多转向特性。其结构简图如图2所示。
第九章横向运动控制 To maintain the smoothness of the steering system,different control strategies should be used to control the steering system for linear and curvilinear roads,re-spectively
Computer should drive car like following: In linear roads,in-car computers calculate look-ahead distance as the input of controllers directly controlling the steering wheel angle of a vehicle.When a control system gives a steering signal,the executive part will respond very quickly and the steering magnitude is very small.By contrast,when the car is entering a curvilinear road,the in-car computer obtains the radius of the curve and the steering angle,and then generates steering commands. To simulate human driving,we introduce two different control strategies to adapt to different road conditions.
1.2 运动校核计算
1.2.1风窗玻璃刮水器运动学校合 根据国标《汽车风窗玻璃刮水器、洗涤器的性能要求及试验方法》(GB 15085-1994)对汽车设计后的风窗玻璃刮水器及洗涤器的实际情况进行校核。但由于尚未制造样车, 因此主要校合舒适, 雨刷区域和视野。 (1)引用标准 GB 11556 汽车风窗玻璃除霜系统的性能要求及其试验方法,按这标准进行三维CAD建模和运动学仿真,以便确定正确的转轴设计硬点. (2)性能要求 a 刮水器的刮刷面积应覆盖A区域的98%以上,B区域的80%以上。 b 如果刮水器的绝大部分零配件在无实际样品的情况下无法校核各个物理指标,可以模拟某刮水器,或略去该标准(GB 15085-1994)对刮水器的各个物理指标(刮水器工作频率、强度及极端温度下工况等)的校核, 略去对风窗玻璃洗涤系统的校核,只对刮刷面积进行校核。 (3)风窗玻璃刮水器的刮刷面积校核
下面以一个例子说明,校合方法: a 相关参数的简要说明: A区域:A区域是下述从V点(即指V1和V2点,V1点和V2点分别为眼椭圆的上下边界点, 向前延伸的4个平面与风窗玻璃外表面相交的交线所封闭的面积。这4个平面是:(1)通过V1和V2点且在X轴的左侧与X轴成13°角的铅垂平面。 (2)通过V1点,与X轴成3°仰角且与Y轴平行的平面。 (3)通过V2点,与X轴成1°俯角且与Y轴平行的平面。 (4)通过V1和V2向X轴的右侧与X轴成20°角的铅垂平面。 B区域:B区域是指由下述4个平面所围成的风窗外表面的面积,且距风窗玻璃透明部分面积边缘向内至少25mm,以较小面积为准。 (1)通过V1点,与X轴成7°仰角且与Y轴平行的平面 (2)通过V2点,与X轴成5°俯角且与Y轴平行的平面。 (3)通过V1和V2点且在X轴的左侧与
1绪论 1.1选题背景与意义 汽车已经成为人们日常生活不可缺少的代步交通工具,在汽车发达国家,旅客运输的60%以上,货物运输的50%以上由汽车来完成,汽车工业水平和家庭平均拥有汽车数量已经成为衡量一个国家工业发达程度的标志。进行汽车运动性能研究时.一般从操纵性、稳定性和乘坐舒适性等待性着手。但近年来.随着交通系统的日趋复杂,考虑了道路环境在内的汽车运动性能开始受到关注。因此,汽车运动控制系统的研究也显得尤为重要,在文中,首先对汽车的运动原理进行分析,建立控制系统简化模型,确定期望的静态指针(稳态误差)和动态指针(超调量和上升时间)。然后对汽车运动控制系统进行设计分析。从而确定系统的最佳静态和动态指针。 2 论文基本原理分析 2.1.1汽车运动横向控制 (1)绝对位置的获得方法 汽车横向方向的控制使用GPS(全球定位系统)的绝对位置信息。GPS信息的精度与采样周期、时间滞后等有关。为提高GPS的数据精度和平滑数据.采用卡尔曼滤波对采样数据进行修正。GPS的采样周期为200ms相对应控制的周期采用50ms。另外考虑通信等的滞后、也需要进行补偿,采用航位推测法(dead reckoning)解决此问题。通过卡尔曼滤波和航位推测法推算出的值作为汽车的绝对位置使用来控制车速、横摆角速度等车辆的状态量。GPS 的数据通过卡尔曼滤波减少偏差、通过航位推测法进行误差和迟滞补偿.提高了位置数据推算的精度。 (2)前轮转角变化量的算出方法 这里对前轮目标转角变化量(?δ)的算出方法作简要说明,横方向控制采用预见控制,可以从现在汽车的状态预测经过时间t p秒后的汽车位置,由t p秒后的预测位置和目标路径
综合型设计实验 题目:基于PLC机电一体化组合实训 姓名:程新华王玉崔 学号: 1000407005 1000407004 指导教师:叶军 专业年级: 10级机电一班 所在学院和系:机械工程学院 完成日期: 2013年7月23日
基本指令的编程练习 (一)与或非逻辑功能实训 在S21 S7-200模拟实训挂箱(一)上完成实训。 一、实训目的 1、熟悉PLC 实训装置,S7-200系列编程控制器的外部接线方法。 2、了解编程软件STEP7的编程环境,软件的使用方法。 3、掌握与、或、非逻辑功能的编程方法。 二、基本指令编程练习的实训面板图 基本指令变成练习 三、梯形图参考程序 通过判断Q0.1、Q0.2、Q0.3、Q0.4的输出状态,然后再输入并运行程序加以验证。 实训参考程序 Q0.0 Q0.1 Q0.2 Q0.3 Q0.4 Q0.5 Q0.6 Q0.7 Q1.0 Q1.1 I0.0 I0.1 I0.2 I0.3 I0.4 I0.5 I0.6 I0.7 I1.0 I1.1 I1.2 I1.3 I1.4 I1.5 左图中的接线孔,通过防转座插锁紧线与PLC 的主机相应输入输 出插孔相接。I 为输入点,Q 为输出点。 上图中下面两排I0.0~I1.1为输入按键和开关,模拟开关量的输入。 上面一排Q0.0~Q1.1是LED 指示灯,接PLC 主机输出端,用以模拟量负载的通断。 面板上的1M 和2M 接地线,1L+、2L+接24V 电压。 I0.7 I1.0 I1.1 I1.2 I1.3 I1.4 I1.5 I0.0 I0.1 I0.2 I0.3 I0.4 I0.5 I0.6 Q0.0 Q0.1 Q0.2 Q0.3 Q0.4 Q0.5 Q0.6 Q0.7 Q1.0 Q1.1
上海同济同捷科技有限公司企业标准 TJI/YJY 悬架运动校核 2005-XX-XX发布2005-XX-XX实施上海同济同捷科技有限公司发布 TJI/YJY
前言 本标准由上海同济同捷科技有限公司提出。 本标准由上海同济同捷科技有限公司质量与项目管理中心负责归口管理。本标准主要起草人:
TJI/YJY 悬架运动校核 1、范围 本标准适用于上海同济同捷科技股份有限公司总布置分院,使用于悬架系统零部件运动校核的规定。 2、引用标准 无 3、悬架系统零部件运动校核内容及要求
3. 悬架系统零部件运动校核内容及要求 3.1前悬架运动校核 3.1.1前悬架的上跳极限为前限位块压缩1/2~2/3时的状态为准,轿车、小型客车推荐取1/2,SUV推荐取2/3 3.1.2前悬架的下跳极限为前减振器活塞杆拉出最长长度+0~1mm 位置时的状态,其中所加的0~1mm为减振器活塞杆固定橡胶块在非悬挂质量作用下向下的变形量。 3.1.3在前悬架的跳动范围内及转向状态检查减振器、弹簧和弹簧座与车身轮包、纵梁、制动油管等的间隙,间隙值不小于12mm,推荐以15~20mm以上为宜。 3.1.4在前悬架的跳动范围内检查摆臂与副车架的运动间隙,摆臂与副车架不允许有干涉现象。 3.1.5在前悬架的跳动范围内检查摆臂球头销的摆动范围,球头销与球头座碗不允许有干涉现象。 3.1.6在前悬架的跳动范围内检查稳定杆的运动范围和与周边零部件的间隙:稳定杆与副车架间隙不小于6mm;稳定杆与转向拉杆间隙
不小于8mm;稳定杆与前围板间隙不小于20mm;稳定杆与纵梁间隙不小于10mm。 3.1.7在前悬架的跳动范围内及转向状态下检查稳定杆连杆运动范围及连杆球头销的摆角:稳定杆连杆不得与周边零件干涉,球头销的摆角在球碗的允许范围内。 3.1.8在前悬架的跳动范围内及转向状态下检查稳定杆与连杆是否存在失稳现象:稳定杆不允许出现翻转现象。 3.2后悬架运动校核 3.2.1后悬架的上跳极限为后限位块压缩1/2~2/3时的状态为准,轿车、小型客车推荐取1/2,SUV推荐取2/3 3.2.2后悬架的下跳极限为后减振器活塞杆拉出最长长度+0~2mm 位置时的状态,其中所加的0~2mm为减振器活塞杆固定橡胶块在非悬挂质量作用下向下的变形量。 3.2.3在后悬架的跳动范围内检查减振器、弹簧和弹簧座与车身轮包、纵梁、制动油管等的间隙,间隙值不小于12mm,推荐以15~20mm 以上为宜。 3.2.4在后悬架的跳动范围内检查稳定杆的运动范围和与周边零部件的间隙:稳定杆与副车架间隙不小于6mm. 3.2.5在后悬架的跳动范围内检查稳定杆连杆运动范围及连杆球头销的摆角:稳定杆连杆不得与周边零件干涉,球头销的摆角在球碗的允许范围内。 3.1.8在后悬架的跳动范围内检查稳定杆与连杆是否存在失稳现象:
汽车各类悬架系统图解说明 独立悬架与非独立悬架示意图13-4所示 独立悬架如图4-57(a)所示,其两侧车轮安装于断开式车桥上,两侧车轮分别独立地与车架(或车身)弹性地连接,当一侧车轮受冲击,其运动不直接影响到另一侧车轮。非独立悬架如图4-57(b)所示。其两侧车轮安装于一整体式车桥上,当一侧车轮受冲击力时会直接影响到另一侧车轮上。 钢板弹簧13-5
钢板弹簧可分为对称式钢板弹簧和非对称式钢板弹簧,对称式钢板弹簧其中心螺栓到两端卷耳中心的距离相等如图(a),不等的则为非对称式钢板弹簧如图(b)。钢板弹簧在载荷作用下变形,各片之间因相对滑动而产生摩擦,可促使车架的振动衰减,起到减振器的作用 扭杆弹簧 扭杆弹簧一般用铬钒合金弹簧钢制成。一端固定在车架上,另一端上的摆臂2与车轮相连。当车轮跳动时,摆臂绕扭杆轴线摆动,使扭杆产生扭转弹性变形,从而使车轮与车架的联接成为弹性联接。 扭杆的断面形式 断面常为圆形,少数是矩形或管形 空气弹簧 空气弹簧主要用橡胶件作为密闭容器,它分为囊式和膜式两种(如图4-61所示),工作气压为0.5~1Mpa。这种弹簧随着载荷的增加,容器内压缩空气压力升高,使其弹簧刚度也随之增加,载荷减少,弹簧刚度也随空气压力减少而下降,具有有理想的变刚度弹性特性。 油气弹簧简图
油气弹簧以气体(化学性质不太活泼的气体-氮)作为弹性介质,用油液作为传力介质。简单的油气弹簧(如图4-62(a)所示)不带油气隔膜。目前,这种弹簧多用于重型汽车,在部分轿车上也有采用的 1-活塞杆2-工作缸筒3-活塞4-伸张阀5-储油缸筒6-压缩阀7-补偿阀8-流通阀9-导向座-10-防尘罩11-油封 双向作用筒式减振器示意图p314 -4-51 横向稳定器的安装13-7copy.gif
中国汽车运动联合会 (场地类)参赛选手注册登记规定 第一条参赛选手注册登记是各类组织和人员参加或举办有组织的汽车运动(含卡丁车项目)的比赛或活动以及从事相关业务活动的基本条件,是掌握全国汽车运动基本状况,进行全面管理的基本手段,也是制订全国汽车运动发展政策、方针和策略的基本依据。 第二条为保证注册登记工作规范有序地进行,现参照国家体育总局制定的《全国运动员注册管理办法》、国际汽车联合会规则,并结合中国汽车运动的实际情况,特制定本办法。 第三条本办法适用于在中华人民共和国境内参加和从事汽车运动的单位和个人。 第四条中国汽车运动联合会(以下简称“中国汽联”)负责对参赛选手进行资格审查、注册登记的审核以及管理工作,其中包括各类数据的同级整理工作。 第五条参赛选手参加中国汽联及会员协会或俱乐部组织的汽车比赛或活动,必须持有中国汽联颁发的比赛执照。获取比赛执照视为正式注册登记。组织者有权拒绝未接受过专项培训的选手报名参赛。 第六条场地类比赛执照分类为: 场地类比赛分为:场地类比赛、直线竞速比赛、飘移比赛、技巧竞速比赛和卡丁车比赛五类。 6.1 场地类T执照适用比赛类型:使用超级跑车、定制运动车型、方程式车型、房车、卡车、新能源车型按规定时间完成最长距离、或者按照规定距离使用最短时间在封闭永久赛道或临时赛道内举行的以竞速为目的且多车同时同道发车并提供计时服务的所有活动。(例如:耐力赛、回合制场地赛); 6.2 直线竞速Z执照适用比赛类型:使用超级跑车、定制运动车型、方程式车型、房车、卡车、新能源车型按规定时间完成最长
距离、或者按照规定距离使用最短时间在直线柏油路面举行的以竞速为目的且单车或多车同时分道发车并提供计时服务的所有活动(例如:直线竞速); 6.3 技巧竞速J执照适用比赛类型:使用超级跑车、定制运动车型、方程式车型、房车、卡车、新能源车型按规定时间完成最长距离、或者按照规定距离使用最短时间在封闭永久赛道或临时赛道内举行的以竞速和同时完成规定项目为目的且单车或多车同时分道发车并提供计时服务的所有活动(例如:卡车技巧比赛); 6.4 飘移比赛P执照适用比赛类型:使用超级跑车、定制运动车型、方程式车型、房车、卡车、新能源车型在封闭赛道内以完成规定动作精确程度打分的,无计时服务的所有活动(例如:漂移比赛)。 6.5 卡丁车类K执照适用比赛类型:使用卡丁车按规定时间完成最长距离、或者按照规定距离使用最短时间在封闭永久赛道或临时赛道内举行的以竞速为目的且多车同时同道发车并提供计时服务的所有活动。(例如:各类卡丁车比赛); 在各类比赛中均设立A级、B级、C级、E级和G级五等(卡丁车项目等级除外)。详见下表: 第七条比赛执照分级和晋级标准 所有场地类比赛执照有效期均为1年(为1个公历年)。新执照自批准之日起至当年12月31日为有效期。
钢板弹簧悬架系统设计规范 1 范围 本规范适用于传统结构的非独立悬架系统,主要针对钢板弹簧和液力筒式减振器等主要部件设计参数的选取、计算、验证等作出较详细的工作模板。 2 规范性引用文件 下列文件中的条款通过本规范的引用而成为本规范的条款。凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本规范,然而,鼓励根据本规范达成协议的各方研究是否可使用这些文件的最新版本。凡是不注日期的引用文件,其最新版本适用于本规范。 QC/T 491-1999 汽车筒式减振器尺寸系列及技术条件 QCn 29035-1991 汽车钢板弹簧技术条件 QC/T 517-1999 汽车钢板弹簧用U形螺栓及螺母技术条件 GB/T 4783-1984 汽车悬挂系统的固有频率和阻尼比测定方法 3 符号、代号、术语及其定义 GB 3730.1-2001 汽车和挂车类型的术语和定义 GB/T 3730.2-1996 道路车辆质量词汇和代码 GB/T 3730.3-1992 汽车和挂车的术语及其定义车辆尺寸 QC/T 491-1999 汽车筒式减振器尺寸系列及技术条件 GB/T 12549-2013 汽车操纵稳定性术语及其定义 GB 7258-2017 机动车运行安全技术条件 GB 13094-2017 客车结构安全要求 QC/T 480-1999 汽车操纵稳定性指标限值与评价方法 QC/T 474-2011 客车平顺性评价指标及限值 GB/T 12428-2005 客车装载质量计算方法 GB 1589-2016 道路车辆外廓尺寸、轴荷及质量限值 GB/T 918.1-1989 道路车辆分类与代码机动车 JTT 325-2013 营运客车类型划分及等级评定 凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本规范,凡是不注日期的引用文件,其最新版本适用于本规范。 4 悬架系统设计对整车性能的影响 悬架是构成汽车的总成之一,一般由弹性元件(弹簧)、导向机构(杆系或钢板弹簧)、减振装置(减振器)等组成,把车架(或车身)与车桥(或车轮)弹性地连接起来。主要任务是传递作用在车轮与车架之间的一切力与力矩,缓和由不平路面传给车架的冲击载荷,衰减由冲击载荷引起的承载系统的
全面解释常见“悬挂系统”以及代表车型点评 2011年07月29日07:00 【搜狐汽车帮你选车】悬挂系统作为汽车中不可缺少的一部分且直接影响到了车辆的舒适性、操控性等。在本文章中我们将会为大家分析悬挂系统于车辆的作用以及主要构成部分。在各种常见的悬挂系统介绍中,我们还会为大家列列举出 各种常见悬挂系统的代表车型。 悬挂系统是汽车的车架与车桥或车轮之间的一切传力连接装置的总称,其功能是传递作用在车轮和车架之间的力和力矩,并且缓冲由不平路面传给车架或车身的冲击力,并衰减由此引起的震动,以保证汽车平顺行驶。悬挂系统应有的功能是支持车身,改善乘坐的感觉,不同的悬挂设置会使驾驶者有不同的驾驶感受。外表看似简单的悬挂系统综合多种作用力,决定着轿车的稳定性、舒适性和安全性,是现代轿车十分关键的部件之一。 悬挂系统的主要构成部分 弹簧
用来缓冲震动的装置。利用弹簧的变型来吸收能量。常见的弹簧型式为「圈形弹簧」,其它被使用在汽车上的弹簧还有「板片弹簧」和「扭力杆弹簧」二种。 减振器 是产生阻尼力的主要元件,其作用是迅速衰减汽车的振动,改善汽车的平顺性,增强车轮与地面的附着性能,减少汽车因惯性力引起的车身倾角变化,提高汽车的操纵性和稳定性。减振器内部藉由液体或气体产生压力来推动阀体,以吸收振动的能量,并且减缓震动的作用。采用气压方式的减振器,其价格一般都比采用油压方式者高。少部分高端的减振器会采取液、气压共享的设计。 防倾杆
将类似ㄇ字形的杆件的二端分别连结在左、右悬挂装置上面,当左、右侧的轮子分别上下移动时,会产生扭力并使杆件自体产生扭转,利用杆件受力所产生的反作用力去使车子的左、右二边维持相近的高度。 连杆 用来连结车轮与车身的杆子。连杆的形状可以是一支外形简单的圆杆,也可能是以钢板制成的一个结构体。 现有常用悬挂系统系统类型