
动,有力地推动了纳米电磁致动器的发展。毫无疑问,在某些场合它仍有很大的应用价值。然而,其
位移精度是众多因素(如驱动力和作用时间等)共同作用的结果,任何一个因素的不利变化都会导致位移精度下降。特别是在大驱动力和变载荷情况下,上述影响就更为显著,成为其进一步发展的严重障碍。
本文介绍的电磁-压电组合式纳米致动器,最大的优点就是成功地将位移精度与驱动力分开处理,使其在大驱动力、变载荷和高稳定性纳米驱动方面具有明显的优势。初步的研究已揭示出该组合式纳米致动器具有良好的前景,进一步的研究工作正在进行之中。有理由相信,在不久的将来会有更多更好的纳米组合式致动器出现。
参考文献:
[1] 姚健,尤政.21世纪的科技前沿——纳米技术.中国
机械工程,1995,6(3):14~16
[2] 杨辉,吴明根.现代超精密加工技术,航空精密制造
技术,1997,33(1):1~8
[3] 江小宁,周兆英,李勇等.微驱动技术.中国仪器仪
表,1993(2):10~12,14
[4] W AN G W an jun ,L lene Bu sch -V ishn ial .A H igh
P recisi on M icropo sitoner Based on M agneto stric 2ti on p rinci p le ,R ev .Sci .In strum ,1992,63(1):
249~254
[5] Douglas P E Sm ith ,Sco tt A E lrod .M agnetically
driven m icropo siti oners .R ev .Sci .In strum .,1985,56(10):1970~1971
[6] D avydov D N ,D eltou r R ,Ho rii N .C ryogen ic Scan 2
n ing T unnelingM icro scopeW ith a M agnetic Coarse A pp roach ,R ev .Sci
.In strum ,1993,64(11):3153~3156
[7] 颜国正,赵国光,余承业.微小型任意行程电磁冲击
式纳米级步距驱动装置及其控制技术的研究.仪器仪表学报,1996,17(4):391~396
[8] B lackfo rd B L ,Jericho M H .A H amm er -A cti on
M icropo siti oner fo r Scann ing P robe M icro scopes .R ev .Sci
.In strum ,1997,68(1):133~135(编辑 华 恒)
作者简介:杨圣,男,1962年生。中国科学技术大学(合肥市
230026)九系副教授、博士。研究方向为精密仪器与精密工程。获
北京市科技进步三等奖1项。参编教材1部,发表论文20余篇。刘东伟,男,1978年生。南京航空航天大学(南京市210016)机电工程学院硕士研究生。
文章编号:1004-132 (2001)11-1319-04
动力磁悬浮轴承的研究现状及关键技术
曾 励 副教授
曾 励 陈 飞 宋爱平 黄民双
摘要:提出一种新型的机电一体化产品——具有电机功能的动力磁悬浮
轴承,阐述了它的研究现状和工作原理,分析了它的应用特点,并介绍了动力磁悬浮轴承理论研究的关键技术。
关键词:动力磁悬浮轴承;旋转偏磁磁通;旋转控制磁通;旋转机械;无轴
承电机
中图分类号:TH 703.3;TM 32 文献标识码:A
1 动力磁悬浮轴承的提出及特点
实现旋转机械高速、大负荷运转的关键是支承转子的轴承和驱动电机的性能。采用传统的支承及驱动方式,必须对支承转子及驱动电机的各机械轴承进行油雾或油液润滑,需要有经验和技术的人员进行调整,而且非常麻烦。这种支承驱动
收稿日期:1999—10—26
基金项目:江苏省教育基金资助项目(00KJB 460009)
方式,轴向尺寸过大,可靠性差,而且由于共振频
率低,无法得到高速和超高速的转动。如果能研制出一种具有电机功能的动力磁悬浮轴承,就可以将旋转机械的驱动电机去掉,由动力磁悬浮轴承支承转子并直接驱动其转动,使结构小型化,并真正实现高速、大负荷运转。
动力磁悬浮轴承(pow er m agnetic bearing ,P -M B )在原理上是以普通的磁悬浮轴承为基础,使其电磁铁提供的磁场不仅要产生支承转子的径向力,而且还要产生驱动转子的扭矩,是集电动机
?
9131?动力磁悬浮轴承的研究现状及关键技术——曾 励 陈 飞 宋爱平等
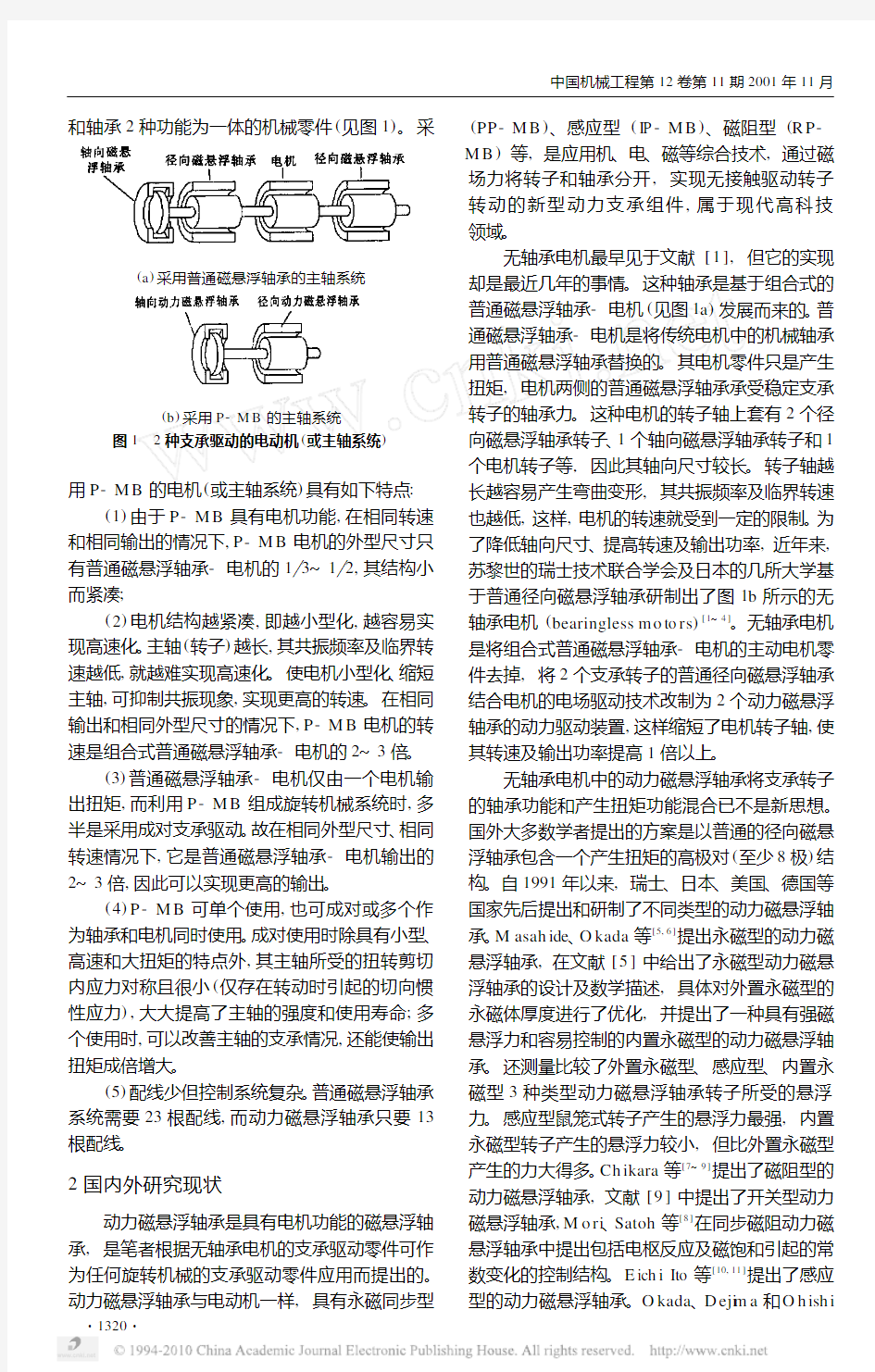
和轴承2种功能为一体的机械零件(见图1)。
采
(a )
采用普通磁悬浮轴承的主轴系统
(b )采用P -M B 的主轴系统
图1 2种支承驱动的电动机(或主轴系统)
用P -M B 的电机(或主轴系统)具有如下特点:
(1)由于P -M B 具有电机功能,在相同转速和相同输出的情况下,P -M B 电机的外型尺寸只有普通磁悬浮轴承-电机的1 3~1 2,其结构小而紧凑;
(2)电机结构越紧凑,即越小型化,越容易实现高速化。主轴(转子)越长,其共振频率及临界转速越低,就越难实现高速化。使电机小型化、缩短主轴,可抑制共振现象,实现更高的转速。在相同输出和相同外型尺寸的情况下,P -M B 电机的转速是组合式普通磁悬浮轴承-电机的2~3倍。
(3)普通磁悬浮轴承-电机仅由一个电机输出扭矩,而利用P -M B 组成旋转机械系统时,多半是采用成对支承驱动。故在相同外型尺寸、相同转速情况下,它是普通磁悬浮轴承-电机输出的2~3倍,因此可以实现更高的输出。
(4)P -M B 可单个使用,也可成对或多个作
为轴承和电机同时使用。成对使用时除具有小型、高速和大扭矩的特点外,其主轴所受的扭转剪切内应力对称且很小(仅存在转动时引起的切向惯性应力),大大提高了主轴的强度和使用寿命;多个使用时,可以改善主轴的支承情况,还能使输出扭矩成倍增大。
(5)配线少但控制系统复杂。普通磁悬浮轴承系统需要23根配线,而动力磁悬浮轴承只要13根配线。
2 国内外研究现状
动力磁悬浮轴承是具有电机功能的磁悬浮轴承,是笔者根据无轴承电机的支承驱动零件可作为任何旋转机械的支承驱动零件应用而提出的。动力磁悬浮轴承与电动机一样,具有永磁同步型
(PP -M B )、感应型(IP -M B )、磁阻型(R P -M B )等,是应用机、电、磁等综合技术,通过磁
场力将转子和轴承分开,实现无接触驱动转子转动的新型动力支承组件,属于现代高科技领域。
无轴承电机最早见于文献[1],但它的实现却是最近几年的事情。这种轴承是基于组合式的普通磁悬浮轴承-电机(见图1a )发展而来的。普通磁悬浮轴承-电机是将传统电机中的机械轴承用普通磁悬浮轴承替换的。其电机零件只是产生扭矩,电机两侧的普通磁悬浮轴承承受稳定支承转子的轴承力。这种电机的转子轴上套有2个径向磁悬浮轴承转子、1个轴向磁悬浮轴承转子和1个电机转子等,因此其轴向尺寸较长。转子轴越长越容易产生弯曲变形,其共振频率及临界转速也越低,这样,电机的转速就受到一定的限制。为了降低轴向尺寸、提高转速及输出功率,近年来,苏黎世的瑞士技术联合学会及日本的几所大学基于普通径向磁悬浮轴承研制出了图1b 所示的无轴承电机(bearingless m o to rs )[1~4]。无轴承电机是将组合式普通磁悬浮轴承-电机的主动电机零件去掉,将2个支承转子的普通径向磁悬浮轴承结合电机的电场驱动技术改制为2个动力磁悬浮轴承的动力驱动装置,这样缩短了电机转子轴,使其转速及输出功率提高1倍以上。
无轴承电机中的动力磁悬浮轴承将支承转子的轴承功能和产生扭矩功能混合已不是新思想。国外大多数学者提出的方案是以普通的径向磁悬浮轴承包含一个产生扭矩的高极对(至少8极)结构。自1991年以来,瑞士、日本、美国、德国等国家先后提出和研制了不同类型的动力磁悬浮轴
承。M asah ide 、O kada 等
[5,6]
提出永磁型的动力磁悬浮轴承,在文献[5]中给出了永磁型动力磁悬浮轴承的设计及数学描述,具体对外置永磁型的永磁体厚度进行了优化,并提出了一种具有强磁悬浮力和容易控制的内置永磁型的动力磁悬浮轴
承。还测量比较了外置永磁型、感应型、内置永磁型3种类型动力磁悬浮轴承转子所受的悬浮力。感应型鼠笼式转子产生的悬浮力最强,内置永磁型转子产生的悬浮力较小,但比外置永磁型
产生的力大得多。Ch ikara 等[7~9]
提出了磁阻型的动力磁悬浮轴承,文献[9]中提出了开关型动力
磁悬浮轴承,M o ri 、Satoh 等[8]
在同步磁阻动力磁悬浮轴承中提出包括电枢反应及磁饱和引起的常数变化的控制结构。E ich i Ito 等[10,11]提出了感应型的动力磁悬浮轴承。O kada 、D eji m a 和O h ish i
?
0231?中国机械工程第12卷第11期2001年11月
在1995年、O kada 等在1997年提出了控制径向磁气隙的永磁同步型和感应型动力磁悬浮轴承。
动力磁悬浮轴承除用于组合设计成仅用于驱动旋转机械转动的无轴承电机外,还可用于其它各种旋转机械支承并驱动其转子转动。文献[12]已经证实了动力磁悬浮轴承在核领域、军事及空间技术方面的应用;日本的Sato sh iU eno 、瑞士的R eto Schob 等研制出了用于人造心脏的血液泵,该类血液泵由动力磁悬浮轴承直接支承叶轮并驱动其转动;瑞士的T hom as Gem pp 等研制的化工用动力磁悬浮轴承支承驱动的罐装泵,杜绝了传统罐装泵机械密封故障,以及油润滑对化工产品的污染;Ro to Schob 等根据动力磁悬浮轴承特点将其用于生物反应器的泡沫床反应堆上,这是一种结构简单紧凑且成本低的有效方案。
动力磁悬浮轴承在日本、瑞士、德国等广泛用于机床主轴系统。采用P -M B 支承驱动的主轴系统,可以使机床向超高速、超精密方向发展。对于超高精密加工的主轴系统,主轴前端的刀具切削工件时,要产生很大的径向力,故除要求其主轴转速高、输出功率(扭矩)大外,还应满足高刚度等条件。采用动力磁悬浮轴承支承驱动主轴,与用组合式磁悬浮-电机驱动主轴相比较,动力磁悬浮轴承可以大大缩短主轴的长度,使其刚度得以大大提高。
开展对P -M B 的研究,对机床乃至任何旋转机械的制造水平,以及改变传统的旋转机械的支承和驱动形式都具有积极意义,并能带来显著的社会经济效益。P -M
B 是追踪国际高科技前沿领域的产品,除用于主轴系统外,还可以用于其它任何旋转机械的支承和驱动,如电机、机床、风机、
泵、压缩机等通用机械设备,以及军事、空间、核工业、能源、化工、交通等各领域的特殊旋转机械,故具有广泛的应用前景和重要的科学
意义。
在国内只有几所高校和科研机构在从事普通磁悬浮轴承的研究,由于动力磁悬浮轴承(或无轴承电机)的研究在国外也起步不久,因此有关的研究工作(或成果)还未见文献报道。
3 动力磁悬浮轴承的工作原理
动力磁悬浮轴承主要由M 极驱动转子转动的线圈和N (N =M ±2)极悬浮转子的位置控制线圈叠加组成。以M =4、N =2为例,其产生扭
矩及径向磁力的基本原理见图2和图3。
(a )Ξt =0 (b )Ξt =
Π2
(c )Ξt =Π (d )Ξt =
3
2
Π图2 动力磁悬浮轴承磁极旋转情况
图3 动力磁悬浮轴承Ξt =0时 产生径向轴承力的原理图
电机功能的实现,是对定子的4极线圈及2极线圈通以三相正弦交流电流,使动力磁悬浮轴承的三相绕组产生合成旋转磁场,当转子中的短路导条切割磁力线时,就产生感应电势和电流,转子电流与磁场作用产生力而驱动转子顺着磁场旋转方向转动,一直到转子的电磁转矩与负载转矩平衡为止。
磁悬浮轴承功能的实现,是以4极线圈提供的磁通54作为旋转偏磁磁通,2极控制线圈提供旋转控制磁通52,以控制转子恒工作在平衡位置。如图3所示,当转子因扰动向下有一微小位移时,2极控制线圈将产生一控制磁通52。控制磁通52与偏置磁通54在转子的上侧气隙1处流向相同,气隙总磁通为54+52,其气隙处的磁场吸力增大;而在转子下侧气隙2处52与54流向相反,
?
1231?动力磁悬浮轴承的研究现状及关键技术——曾 励 陈 飞 宋爱平等
气隙总磁通为54-52,其气隙处的磁场吸力减小,使转子受到一向上的径向磁悬浮合力,推动其重新回到平衡位置。如果改变2极控制线圈的电流方向和大小,则可控制径向力的方向和强度。
4 动力磁悬浮轴承的关键技术
在此提出几个有关P -M B 理论研究方面的
关键技术。
4.1 机电能量转换数学模型
P -M B 与电动机一样实际上是一种通过磁场耦合方式的机电能量转换装置,其产生的电磁悬浮力和电磁转矩是由电能通过磁场耦合转换为机械能的结果,因此,研究P -M B 的能量转换尤为重要。表达能量转换关系的基本方程主要有磁链方程、电压方程、电磁悬浮力及电磁转矩方程及其等效电路等。在建立这些数学模型时,要把边界条件变化(如转子与定子之间偏心引起的圆周气隙变化等)的因素考虑进去,这样,P -M B 的理论研究就比电动机本体结构理论要复杂得多。4.2 技术性能参数
P -M B 的技术性能参数包括反映承载能力
的径向电磁悬浮力和电磁驱动转矩、转速、转差
率、刚度,以及机械特性等。由于P -M B 的定子是由2套绕组分别产生旋转的N 极对控制调节磁场和旋转的M 极对偏置磁场,两者的合成磁场是决定这些性能参数变化的主要因素。因两旋转磁场的极数N 和M 不相等,其合成磁通是变幅的正弦函数,故合成旋转磁场的同步转速也是随旋转波动变化的。同步转速直接影响各性能参数的好坏,因此P -M B 技术性能参数研究的关键是合成旋转磁场的研究。4.3 控制策略
由于P -M B 的旋转合成磁场是由旋转控制
磁场和旋转偏置磁场叠加的磁场,故径向负载的变化将对转子转速及电磁转矩产生影响;反过来负载力矩的变化又将影响径向悬浮力及轴承的支承刚度,因此必须对P -M B 支承驱动主轴时的3个自由度进行综合矢量控制。在转子承受的负载不大时,可对转子转动和悬浮进行独立的矢量控制,但系统的稳态性能、动态性能并不是很理想的。因此P -M B 的控制策略是影响系统性能的关键技术。
参考文献:
[1] B ich sel J .Beitrage Zum L agerlo sen E lek tromo to r .
D issertati on ETH ,Zu rich ,1990:233
~239[2] Ch iba A ,Pow er D T ,R ahm an M A .Characteristics
of a Bearingless L nducti on M o to r .IEEE T ran sac 2
ti on s on M agnetics ,1991,27(6):1083
~1090[3] Schob R .Beitrage Zu r L agerlo sen A synch ronm as 2
ch ine .D issertati on ETH ,Zu rich ,1993:139
~145[4] O h ish i T ,D eji m a K .A nalysis and D esign of a Con 2
cen trated W ound Stato r fo r Synch ronou s -T ype L evitated Ro to r .In :Fou rth In ternati onal Sympo 2
sium on M agnetic Bearings ,Zu rich ,1994:141
~148[5] M asah ide Oo sh i m a ,Sato ru M iyazaw a ,A k ira Ch iba
et a l .A Ro to r D esign of a Perm anen t M agnet -
T ype Bearingless M o to r Con sidering D em agnetiza 2ti on .In :IEEE P roceeding of Pow er Conversi on
Conference ,N agaoka ,1997:665
~660[6] O kada Y ,D eji m a K ,O sh ina T .A nalysis and Com 2
parison of P M Synch ronou s M o to r and Inducti on M o to r T ype M agnetic Bearings
.IEEE T ran sacti on on Indu stry A pp licati on ,1995,31(5):1047
~1053[7] Ch ikara M ich i oka ,Tomokazu Sakamo to ,O sam u
Ich iikaw a et a l .A D ecoup ling Con tro l M ethod of R eluctance -T ype Bearingless M o to rs Con sidering M agnetic Satu rati on .IEEE T ran sacti on on Indu stry
A pp licati on s ,1996,32(5):1204
~1210[8] M o ri S ,Satoh T ,O h saw a M .Experi m en ts on a
Bearingless Synch ronou s R eluctance M o to r w ith L oad .In :F ifth In ternati onal Sympo sium on M ag 2
netic Bearings ,Kanazaw a ,1996:339
~343[9] M asatsugu T akemo to ,Ken Sh i m ada ,A k ira Ch iba
et a l .A D esign and Characteristics of Sw itched R e 2
luctance T ype Bearingless M o to rs
.In :4th In terna 2ti onal Sympo sium on M agnetic Su spen si on T ech 2no logy ,Gifu ,1992.
[10] E ich i Ito ,A k ira Ch iba ,T adash i Fukao .A M ea 2
su rem eng of VA R equ irem en t in a Inducti on T ype Bearingless M o to r .4th In ternati onal Sympo sium on M agnetic Su spen si on T echno logy ,Gifu ,1992.
[11] T akamo to Y ,Ch iba A ,Fukao T .T est R esu lts on a
P ro to type Bearingless Inducti on M o to r w ith F ive -A x is M agnetic Su spen si on .IPEC -Yokoham a
’95,1995:334
~339[12] Yo sh ida K .T he Canned Bearing .Glacier N ew s up 2
date ,1994,1:105
~109(编辑 卢湘帆)
作者简介:曾 励,男,1957年生。扬州大学(江苏省扬州市
225009)工学院副教授。研究方向为流体传动与控制、机械传动、
磁悬浮技术等。发表论文40余篇。陈 飞,男,1976年生。扬州大学工学院教师。宋爱平,1965年生。扬州大学工学院副教授。黄民双,男,1964年生。北京工业大学(北京市 100022)副教授。
?
2231?中国机械工程第12卷第11期2001年11月
the resu lts of quan titative physical si m u lati on ,num erical
value si m u lati on and the ten si on stress theo ry of a rigid -p lastic m echan ical model
.T he feasib ility has been p roved that op tical p lasticity cou ld be u sed in quan titative si m u la 2ti on stress field on heating fo rging p ieces cen ter .L aying a foundati on ,comp lex th ree -di m en si onal p rob lem m ay be so lved .
Key words :up setting stress field op tical p las 2ticity quan titative physical si m u lati on Research on M agnetic Abra sive M ach i n i ng by Apply i ng a Rota ti ng M agnetic F ield FAN G J iancheng (H auqiao U n iversity Q uanzhou ,Q uanzhou ,Fu jian ,Ch ina )J I N Zhu ji
XU W en ji ZHOU J in jin p 130421306,1326
Abstract :In o rder to so lve the difficu lt p rob lem of in 2ternal fin ish ing fo r ou tsize and abno rm al shape p i pe ,the new techno logy of m agnetic field con tro lled by pu lse cir 2cu it fo r realizing m agnetic ab rasive m ach in ing (M AM )is p resen ted .T he m echan is m of M AM by app lying a ro tat 2ing m agnetic field is investigated ,and the generati on de 2vice of ro tating m agnetic field is analyzed and designed .T he resu lts show :(1)amoun t of m agnetic ab rasive (M A )supp lied effects on the stock removal and the su r 2face roughness directly ,and it has op ti m um value .(2)
the fin ish ing efficiency and su rface roughness can be i m 2p roved effectively ifM A is m ixed w ith iron pow ders in ra 2ti onal m esh size o r w eigh t percen tage .T he techno logy w ill offer u sefu l basis in p ractical m anufactu re .
Key words :ro tating m agnetic field m agnetic ab rasive fin ish ing m ach in ing m ach in ing quality Study on i ncen tive m echan is m s of green manufactur i ng W AN G N engm in (X i ′an J iao tong U n iversity ,X i ′an ,Ch i 2na ) SUN L inyan W AN G Y ingluo p 130721310Abstract :T he values of green m anufactu ring are ex 2pounded from the eth ics and econom y ,the in trin sic con 2tradicti on s to i m p lem en t green m anufactu ring are ana 2lyzed .It is pu t fo rw ard that the view of equ ity betw een generati on s is the eth ical basis of green m anufactu ring and that the p romp ting of m arket and governm en t and the incen tive compatib ility in m anufactu ring team are i m po r 2tan t i m petu s to i m p lem en t green m anufactu ring .T he in 2cen tive m echan is m s of m arket ,governm en t and m anufac 2tu ring team is i m p roved by the w ay of gam e theo ry .Key words :green m anufactu ring ,equ ity betw een generati on s ,incen tive m echan is m
Tran sport of Goods and M a ter i a l i n a M odern En terpr ise ZHOU J ian jun (J iangling M o to rs Co .,Group ,N an 2chang ,Ch ina )p 131121315
Abstract :A ccompan ied w ith the accelerati on of eco 2nom ic globalizati on ,netw o rk and in tellictualizati on ,the competiton betw een en terp rises is a competiti on of capaci 2
ty and speed w h ich can m eet cu stom s’needs
.T he change of ti m e to tran spo rt goods and m aterials ,is no t on ly an
i m p rovem en t of tran spo rt efficiency ,bu t also an i m p rove 2m en t of capacity how a en terp rise p roducti on system
adap t and react to the m arket ,and then an i m p rovem en t of the w ho le m anagem en t efficiency and the coo rdinati on among each link in a facto ry .Bu ilding up a n i m b le and re 2liab le m anagem en t system to con tro l the tran spo rt of goods and m aterials ,is the on ly w ay that a modern en ter 2p rise confo rm to the situati on of indu strial p roducti on and the competiti on on in ternati onal m arket .
Key words :en terp rise m anagem en t tran spo rt of goods and m aterials au tomob ile p roducti on
D evelop m en t of Nano m eter Electro magnetic Actua tors YAN G Sheng (U n iversity of Science and T echno logy of Ch ina ,H efei ,Ch ina ) L I U Dongw ei p 131621319Abstract :N anom eter actuato rs (also called m icro 2drivers ,m icropo siti oners etc .)are key parts of nanom e 2ter m easu rem en t and con tro l devices ,and the latter is the
i m po rtan t foundati on of nano techno logy
.T h is paper dis 2cu sses the p rinci p le of nanom eter electrom agnetic i m pu l 2
sive actuato rs ,gives som e typ ical structu res ,and p re 2sen ts a com b inati on actuato r of new m echan is m developed
by the au tho rs
.Key words :electrom agnetic actuato r m icrodriver
m icropo siti oner nano techno logy
The D evelop m en t and the Key Technology of the Power M agnetic Bear i ng ZEN G L i (Yangzhou U n iversity ,Yangzhou ,J iangsu ,Ch ina ) CH EN Fei SON G A i p ing HUAN G M in shuang p 131921322
Abstract :Based on the p rinci p le of radial m agnetic bearing ,the paper p resen ts a new type m achatron ics part —the pow er m agnetic bearing (P -M B )w ith mo rto r’s functi on .A nd the m in itype ,u ltra h igh speed and b ig to rque characteristics are discu ssed ,the developm en t and the p rinci p le are described .T he key techno logy of a P -M B w as deliverd in addti on .
Key words :pow er m agnetic bearing ro tary b ias m agnetic flux ro tary con tro l flux ro tary m ach in 2ery bearingless mo to r
Research and D evelop m en t on Fault D i agnosis of Hy -draulic Syste m s SH I Hong (H arb in In stitu te of T ech 2no logy ,H arb in ,Ch ina ) W AN G Kejun L I Guob in p 132321326
Abstract :T h is article begin s w ith the b rief in troduc 2ti on to theo ries and app roaches on fau lts diagno sis ,then discu sses som e diagno stic m ethods (viz the m ethods based on m ath model and A I )app lied to hydrau lic system s ,and analyzes the m ain featu res of these conven ti onal and mod 2ern m ethods ,w h ich p resen ts a valuab le reference to se 2lect p roper m ean s fo r the fau lt diagno sis of hydrau lic sys 2
tem s
.Key words :fau lt diagno sis hydrau lic system signal p rocessing and modeling artificial in telligen t
?
6?CH I NA M ECHAN I CAL EN G I N EER I N G V o l
.12,N o .11,2001
磁悬浮球控制系统的仿真研究 王玲玲,王宏,梁勇 (海军航空工程学院,山东烟台 264000) 作者简介:王玲玲(1984—),女,硕士,讲师,主要从事控制技术研究。 本文引用格式:王玲玲,王宏,梁勇.磁悬浮球控制系统的仿真研究[J].兵器装备工程学报,2017(4):122-126. Citation:format:WANG Ling-ling, WANG Hong, LIANG Yong.Simulation and Research of Magnetic Levitation Ball Control System[J].Journal of Ordnance Equipment Engineering,2017(4):122-126. 摘要:针对磁悬浮球系统的本质不稳定性,设计PID控制算法实现系统的稳定控制。建立磁悬浮球系统的动力学模型,并对其中的非线性部分进行平衡点处的线性化,采用根轨迹校正设计超前滞后控制器。最后采用PID控制设计,并使用根轨迹校正中零极点对系统性能影响的思想去调整PID参数,使系统的稳定性、动态性能和稳态性能满足要求。 关键词:磁悬浮球系统;PID;根轨迹法;校正 磁悬浮可以用于实现各种机械结构的高速、无摩擦运转,如高速磁悬浮列车、高速磁悬浮电机、磁悬浮轴承等。尽管磁悬浮的应用领域繁多,系统形式和结构各不相同,但究其本质都具有本质非线性、不确定性、开环不确定性等特征。这些特征增加了对其控制的难度,也正是由于磁悬浮的这些特性,使其更加具有研究价值和意义。本文针对磁悬浮球系统,研究其稳定控制,并使其性能指标满足要求。 1 磁悬浮球控制系统的基本原理 磁悬浮球控制系统主要由铁芯、线圈、光电源、位置传感器、放大及补偿装置、数字控制器和控制对象钢球等部件组成[1],如图1所示。 当电磁铁上的线圈绕组通电时,位于磁场中的刚体受到电磁力的吸引作用。当产生的电磁力与球体的重力相等时,球体悬浮于空中,处于不稳定的平衡状态,当它受到外界扰动时,易失去平衡。因此,为了使系统稳定,就必须加上反馈环节,实现闭环控制,并设计控制算法,使稳定后的性能满足要求。
磁悬浮轴承 摘要 一种低能耗永磁偏置悬浮轴承系统,属磁悬浮轴承。包括定子支架1、外磁环2、内磁环5、轴套6、青铜瓦8、青铜瓦19,调整螺杆9、软铁10、轴承室11、端盖22,这种永磁偏置轴承结构简单,承载能力强,刚度大,悬浮力可调,安全可靠,对外磁干扰小,在旋转机械领域拥有广泛的应用前景。
权利要求书 1.一种径向支撑的永磁悬浮轴承装置,用于支撑转子轴7,其特征在于, 主要包括四自由度永磁偏置装置,单自由度磁阻轴承装置,永磁悬浮力调节装置,轴承保护装置以及磁屏蔽装置。包括定子支架1、外磁环2、内磁环5、轴套6、耐磨套8、耐磨套19、调整螺杆9、软铁10、轴承室11、端盖22。其中定子支架1嵌套于轴承室内,用于安装外磁环2以及可滑动软铁10,轴套6固定在转子轴7上,内磁环5安装于轴套6的滑道中,耐磨套19和耐磨套8分别套在轴套6的前后端,端盖22装在轴承室11的前端。 2.按权利要求1所述的四自由度永磁偏置装置,包括外磁环2、内磁环 5、定子支架1,其主要特征为:两磁环沿圆周的方向同心放置,外磁 环2与内磁环5充磁方向相反,即两磁环之间为斥力作用。 3.按权利要求2所述的外磁环2,其特征为:由若干块瓦片型磁铁组成, 磁铁固定在外支架上,不能移动,充磁方向为瓦片厚度方向,磁环下方产生的总磁场强度大于上方产生的总磁场强度。 4.按权利要求2所述的内磁环5,其特征为:由径向充磁的环形磁铁或 由大小形状完全相同的瓦片型磁铁拼合而成的圆环组成,如为瓦片型磁铁拼合而成,充磁方向为瓦片厚度方向,磁环产生的磁密在圆周上均匀分布。 5.按权利要求2所述的定子支架1,其特征为:材料为导磁性材料,结 构与异步电机定子铁心类似,为齿槽结构,支架上半部分齿长,与外磁环2厚度相同,下半部分齿短,依靠上齿对转子磁环的磁吸力来增大轴承系统的悬浮力。
开题报告 电气工程及其自动化 主动型磁悬浮轴承系统模拟控制器的设计 一、综述本课题国内外研究动态,说明选题的依据和意义 1、选题的背景与意义: 自18世纪末,人们就对磁悬浮技术有所了解。1842年英国剑桥大学的恩休(Earnshaw)就提出了磁悬浮的概念,并证明了铁磁体不可能仅由另一个永久磁铁而在六个自由度上都保持自由稳定的悬浮,必须至少有一个自由度被机械或其他约束所消除。自此人们就对磁悬浮有了一个了解,在历经近200年的发展磁悬浮在现代的生产生活中有着广泛的应用。在机械电子领域的发展更是突破性的,1937年久游人提出的磁悬浮轴承的相关概念,这就是我们现在的磁悬浮列车的前生。在机械工业领域也有着广泛的应用,SKF公司的磁轴承的控制器所用控制规律为自适应控制,其产品适用的范围:承载力50~2500N、转速1,800~100,000r/min,工作温度低于220℃。NASA是美国航天局,他们开展磁悬浮研究已有几十年,主要用于航天上,研究领域包括火箭发动机和磁悬浮轨道推进系统(2002年9月已完成在磁悬浮轨道上加2g加速度下可使火箭的初始发射速度达到643~965km/h)。在国内,有根据两个点电荷之间作用力关系,以径向磁化径向磁轴承为例,建立了径向磁轴承的数值积分模型;结合等效磁荷法,根据两个点电荷之间作用力关系,以轴向磁化径向磁轴承为例,建立了径向磁轴承的数值积分模型;用有限元法进行了永磁轴承的转子-磁体在高速运转状态下的应力和变形分析,求得其极限转速(60000r/min),为永磁轴承系统设计提供了有价值的设计依据。轴向磁化类型的径向永磁轴承结构,设计该类型永磁轴承支承转子系统,并以此为中心进行了相关的理论公式推导、仿真分析研究和实验验证,最后进行了初步的永磁悬浮轴承-转子系统动力学特性分析等研究。 为了提高电主轴的转速,人们对机械轴承及其润滑问题进行了大量的研究:角度接触的铁质轴承、陶瓷滚珠轴承、脂润滑、油雾润滑等。迄今为止,高速电主轴中机械轴承的寿命问题仍然是个难题。为了使电主轴在高转速下延长寿命,开展了气浮轴承电主轴、静压轴承电主轴和磁悬浮轴承电主轴方面的研究,其中磁悬浮轴承电主轴由于具有高转速、长寿命等突出优点引起科技工作者的关注。随着控制技术、材料科学、电力电子技术等的飞速发展,为研究和实际应用磁悬浮轴承技术提供了可行的条件,使得磁悬浮轴承电主轴成为当今高科技研究方向之一。 2、研究的基本内容
磁力轴承简介 磁悬浮轴承又称磁力轴承,是目前世界上公认的高新技术之一。陆地上广泛采用的是主动控制磁悬浮轴承(简称主动磁轴承-AMB),它是利用可控磁场力提供无接触支承、使转子稳定悬浮于空间且其动力学性能可由控制系统调节的一种新型高性能轴承,是一种典型的机电一体化产品。其技术涉及到机械学、电磁学、电子学、材料学、转子动力学、控制理论和计算机科学等。由于磁力轴承具有无接触、无磨损、高速度、高精度、无需润滑和密封等一系列优良品质(能耗是传统机械轴承的5-20%,是空气静压轴承的10-20%;若用于机床,其切除量可提高3-6倍,进给速度提高5-10倍,切屑力降低30%),是本世纪最有发展前途的主导轴承之一。 一、发展历史简述 1972年,法国最早将磁力轴承用于通讯卫星的导向飞轮支承上。美国于1983年在航天飞机的实验室真空泵上采用了磁力轴承。1986年日本在H-1火箭进行的磁浮飞轮空间实验上获得了成功应用。 民用第一个产品是1983年,第五届欧洲机床展上,S2M公司展出了磁悬浮电主轴部件。 二、主要性能参数 目前,磁力轴承可达的技术指标范围至少为: 1)转速:(0~8)×105 r/min
2)直径14~600 mm 3)单个轴承承载力:(0.3~5)×104 N 4)使用温度范围:-253~450 °C 三、应用范围 根据国际上发表的文献统计,磁力轴承可推广应用的领域如下表(此外还可用于飞轮储能、减震器、尖端武器等): 四、应用图解 典型的五自由度磁轴承-转子系统工作原理及其应用参见下页附图。
五、国内发展及应用现状 国内磁力轴承的发展及应用,整体还停留在实验室研究阶段,工业应用很少,水平要落后世界先进水平10-20年。但在某些方面的研究已经接近甚至达到世界先进水平。 国内在磁力轴承研究具有代表性的机构有清华大学和浙江大学(主要致力于磁轴承高频电主轴和阻尼器的研究)、上海交大和上海微电机研究所(惯性器件和仪器)、西安交大(磁力轴承力学特性研究)、哈工大和广州机床研究所(卫星姿态控制飞轮和机床主轴)等数十家。 六、磁力轴承产品图 可购买《磁力轴承研究进展》
磁悬浮轴承的优点及原理 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 1基本原理 从原理上磁悬浮轴承可以分为两种,一种是主动型磁悬浮轴承;另一种是被动型磁悬浮轴承。因为前者具有良好的控制性能,所以它越来越广泛地应用在工业上。主动型磁悬浮轴承基本原理如下图所示,通过传感器检测出转子的位移信号,将该信号送人控制器,控制器按照设定的控制策略处理后经功率放大器产生控制电流,驱动电磁铁线圈产生相应的电磁力,实现转子悬浮。 图主动型磁悬浮轴承系统原理图 2磁悬浮轴承的优点 与传统的机械轴承相比,磁悬浮轴承具有以下与传统的机械轴承相比,磁悬浮轴承具有以下优点:
(1)无接触、无磨损、无润滑:磁悬浮轴承工作时,处于悬浮状态,相对运动表面之间无接触,不产生机械摩擦和接触疲劳,解决了机组部件损耗和更换问题。同时省掉了润滑系统等一系列装置,即节省了空间又不存在前述装置对环境的污染问题。 (2)低振动、低噪声、低功耗:磁悬浮轴承转子避免了传统轴承在运行时的接触碰撞弓丨起的大幅振动以及高分贝噪声,提高了稳定性,降低了维护费用,延长了其使用寿命,同时悬浮磁悬浮轴承的低功耗,仅是传统机械轴承功耗的6%~25%。在转速为 10000r/min时,其功耗只有机械轴承的15%左。 (3)高转速、高精度、高可靠性:允许转子高速旋转,其转速主要受材料强度的限制,可以在超临界,每分钟数十万转的工况下工作,而且转子的回转精度已经达到微米级甚至更高,这是普通机械轴承远远达不到的转速和精度,而且电子元器件的可靠性在很大程度上高于传统的机械零部件。 (4)可控性、可在线工况监测、可测试诊断:我们可以对磁悬浮轴承的静态和动态性能进行在线控制。事实上,其本身系统就实现了集工况监测、故障诊断和在线调节的一体化。 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展.
磁悬浮轴承的发展现状及应用研究 一、磁悬浮技术概述 磁悬浮,亦作磁浮,是运用磁铁“同性相斥,异性相吸”的性质,使磁铁具有抗拒地心引力的能力,即“磁性悬浮”,从而使物件不受引力束缚自由浮动,具有无接触、无摩擦、低能耗、低噪声、无需润滑、维护费用低、使用寿命长、高精度以及自动化程度高等优点。磁悬浮技术是集电磁学、电子技术、控制工程、信号处理、机械学、动力学等为一体的机电一体化综合性较强的高新技术,其研究源于德国,早在1922年德国工程师赫尔曼〃肯佩尔就提出了电磁悬浮原理,并于1934年申请了磁悬浮列车的专利。1966年,美国科学家詹姆斯·鲍威尔和戈登·丹比提出了第一个具有实用性质的磁悬浮运输系统,此后,德国、日本、美国、加拿大、法国、英国等发达国家为提高交通运输能力以适应经济发展需要加快筹划磁悬浮运输系统的开发。随着电子技术、控制工程、信号处理元器件、电磁理论及新型电磁材料的发展和转子动力学的进展,磁悬浮技术得到了长足的发展。至2012年世界上已有三种类型的磁悬浮,一是以德国为代表的常导电式磁悬浮,二是以日本为代表的超导电动磁悬浮,这两种磁悬浮都需要用电力来产生磁悬浮动力。第三种是中国的永磁悬浮,它利用特殊的永磁材料,不需要任何其他动力支持。 磁悬浮技术应用范围及其广泛,涉及工业、民用及军事各个领域,磁悬浮产品涵盖高速精密电主轴、磁悬浮飞轮电池、磁悬浮人工心脏泵,磁悬浮火车、卫星、远程导弹的制
导与姿态控制,军事通讯用的UPS,航空发动机的高速转子,潜艇的振动控制与传动噪音,坦克、装甲车的动力储能、磁悬浮冶炼、搬运技术等。当前,国内外对磁悬浮技术的研究热点是磁悬浮轴承和磁悬浮列车,而应用最广泛的是磁悬浮轴承。 二、磁悬浮轴承及其类型 磁悬浮轴承也称电磁轴承或磁力轴承,是利用磁场力将轴承无机械摩擦、无润滑的、悬浮在空间的一种新型高性能轴承,其作为一种新颖的支撑部件,是继油润滑、气润滑之后轴承行业的又一次革命性变化, 被誉为21世纪最有发展前景的高新技术之一。 磁悬浮轴承的原理是磁感应线与磁浮线成垂直,轴芯与磁浮线平行,转子的重量能够固定在运转的轨道上,利用几乎是无负载的轴芯往反磁浮线方向顶撑,形成整个转子悬空,固定在特定运转轨道上。 按照磁力的提供方式,磁悬浮轴承可分为三大类 : (一)主动磁浮轴承 (Active Magnetic Bearing,简称 AMB),轴承磁场是可控的,通过传感器检测转轴的位置,由控制系统对电磁铁电流进行主动控制来实现转轴的稳定悬浮。 (二)被动磁浮轴承 (Passive Magnetic Bearing,简称PMB),轴承部分自由度由超导磁体或永磁体来实现被动悬浮支承。 (三)混合磁浮轴承 (Hybrid Magnetic Bearing,简称 HMB),轴承的机械结构中既包含了可控的电磁铁,又包含了提供偏置磁场的超导磁体或永磁体。 同时,按磁场力的来源分类,可以分为永久磁铁型、电
磁悬浮轴承发展及应用 概述 : 磁浮轴承是利用磁力实现无接触的新型轴承,具有无接触、不需要润滑和密封、振动小、使用寿命长、维护费用低等一系列优良品质,属于高技术领域。轴承是机电工业的基础产业之一,其性能的好坏直接影响到机电产品(如超高速超精密加工机床)的科技含量及其在国际上的竞争力。本项目不仅要可以在国内建立生产磁浮轴承的高技术企业,填补国内在这方面的空白,而且可以带动机电行业的很多相关企业进行产品结构调整,形成新的经济增长点。此外,本项目具有重要的国防应用价值,可为我国研制以磁轴承支承的新一代航空发动机储备先进的科学技术。 磁浮轴承的基本原理 磁浮轴承从原理上可分为两种,一种是主动磁浮轴承(active magnetic bearing),简称AMB;另一种是被动磁浮轴承(passive magnetic bearing),简称PMB。由于前者具有较好的性能,它在工业上得到了越来越广泛的应用。这里介绍的是主动磁浮轴承。 磁浮轴承系统主要由被悬浮物体、传感器、控制器和执行器四大部分组成。其中执行器包括电磁铁和功率放大器两部分。下图是一个简单的磁浮轴承系统,电磁铁绕组上的电流为I,它对被悬浮物体产生的吸力和被悬浮物体本身的重力mg相平衡,被悬浮物体处于悬浮的平衡位置,这个位置也称为参考位置。假设在参考位置上,被悬浮物体受到一个向下的扰动,它就会偏离其参考位置向下运动,此时传感器检测出被悬浮物体偏离其参考位置的位移,控制器将这一位移信号变换成控制信号,功率放大器使流过电磁绕组上的电流变大,因此,电磁铁的吸力也变大了,从而驱动被悬浮物体返回到原来的平衡位置。如果被悬浮物体受到一个相上的扰动并向上运动,此时控制器和功率放大器使流过电磁场铁绕组上的电流变小,因此,电磁铁的吸力也变小了,被悬浮物体也能返回到原来的平衡位置。因此,不论被悬浮物体受到向上或向下的扰动,下图中的球状被悬浮物体始终能处于稳定的平衡状态。
磁悬浮轴承稳定性分析 磁悬浮轴承(Magnetic Bearing)是利用磁力作用将转子悬浮于空中,使转子与定子之间没有机械接触。与传统的滚珠轴承,滑动轴承以及油膜轴承相比,磁轴承不存在机械接触,转子的转速可以运行到很高,具有机械磨损小,能耗低,噪声小、寿命长、无需润滑,无油污染等优点,特别适用于高速、真空、超净等特殊环境。这项技术是20世纪60年代中期在国际上开始研究的一项新的支撑技术。在各个领域都有着广泛的应用。本文主要分析磁悬浮轴承的稳定性问题。文章的第一部分介绍了磁悬浮轴承在国际和国内的发展与研究现状,并分析了磁悬浮轴承的一些特点。文章的第二部分对磁悬浮轴承的稳定性进行了讨论,先论证了永磁轴承无法实现自稳定,然后对电磁轴承的稳定性进行了分析。 关键词:磁悬浮,轴承,电磁轴承,永磁轴承,稳定性 第一章引言 第一节磁悬浮轴承的研究背景 国际上很早就有了利用磁力使物体处于无接触悬浮状态的设想, 但其实现却经历了很长的一段时间。1842 年, Earnshow 证明: 单靠永磁体不能将一个铁磁体在所有 6 个自由度上都保持在自由稳定的悬浮状态.真正意义上的磁悬浮研究开始于20世纪初的利用电磁相吸原理的悬浮车辆研究,1937 年, Kenper 申请了第一个磁悬浮技术专利, 他认为,要使铁磁体实现稳定的磁悬浮, 必须根据物体的悬浮状态不断的调节磁场力的大小,因此必须采用可控电磁铁,这也是以后开展磁悬浮列车和磁悬浮轴承研究的主导思想。 随着现代控制理论和电子技术的飞跃发展, 20世纪 60 年代中期对磁悬浮技术的研究跃上了一个新台阶。日本、英国、德国都相继开展了对磁悬浮列车的研究。资料记载: 1969 年, 法国军部科研实验室(LRBA ) 开始对磁悬浮轴承的研究; 1972 年,第一个磁悬浮轴承用于卫星导向轮的支撑上, 从而揭开了磁悬浮轴承发展的序幕。此后, 磁悬浮轴承很快被应用到了国防、航天等各个领域。1983年11月,美国在搭载在航天飞机上的欧洲空间试验仓里采用了磁悬浮轴承真空
磁悬浮技术 磁悬浮技术(英文:electromagnetic levitation,electromagnetic suspension)简称EML技术或EMS技术)是指利用磁力克服重力使物体悬浮的一种技术。 目前的悬浮技术主要包括磁悬浮、光悬浮、声悬浮、气流悬浮、电悬浮、粒子束悬浮等,其中磁悬浮技术比较成熟。 磁悬浮技术实现形式比较多,主要可以分为系统自稳的被动悬浮和系统不能自稳的主动悬浮等。 磁悬浮列车是由无接触的磁力支承、磁力导向和线性驱动系统组成的新型交通工具,主要有超导电动型磁悬浮列车、常导电磁吸力型高速磁悬浮列车以及常导电磁吸力型中低速磁悬浮。 原理 磁悬浮技术的系统,是由转子、传感器、控制器和执行器4部分组成,其中执行器包括电磁铁和功率放大器两部分。假设在参考位置上,转子受到一个向下的扰动,就会偏离其参考位置,这时传感器检测出转子偏离参考点的位移,作为控制器的微处理器将检测的位移变换成控制信号,然后功率放大器将这一控制信号转换成控制电流,控制电流在执行磁铁中产生磁力,从而驱动转子返回到原来平衡位置。因此,不论转子受到向下或向上的扰动,转子始终能处于稳定的平衡状态。 2012年,世界上有3种类型磁悬浮技术,即日本的超导电动磁悬浮、德国的常导电磁悬浮和中国的永磁悬浮。永磁悬浮技术是中国大连拥
有核心及相关技术发明专利的原始创新技术。据技术人员介绍,日本和德国的磁悬浮列车在不通电的情况下,车体与槽轨是接触在一起的,而利用永磁悬浮技术制造出的磁悬浮列车在任何情况下,车体和轨道之间都是不接触的。中国永磁悬浮与国外磁悬浮相比有五大方面的优势:一是悬浮力强。二是经济性好。三是节能性强。四是安全性好。五是平衡性稳定。 前景 随着电子元件的集成化以及控制理论和转子动力学的发展,经过多年的研究工作,国内外对该项技术的研究都取得了很大的进展。但是不论是在理论还是在产品化的过程中,该项技术都存在很多的难题,其中磁悬浮列车的技术难题是悬浮与推进以及一套复杂的控制系统,它的实现需要运用电子技术、电磁器件、直线电机、机械结构、计算机、材料以及系统分析等方面的高技术成果。需要攻关的是组成系统的技术和实现工程化。 磁悬浮轴承面向电力工程的应用也具有广阔的前景,根据磁悬浮轴承的原理,研制大功率的磁悬浮轴承和飞轮储能系统以减少调峰时机组启停次数;进行以磁悬浮轴承系统为基础的振动控制理论的研究,将其应用于汽轮机转子的振动和故障分析中;通过调整磁悬浮轴承的刚度来改变汽轮机转子结构设计的思想,从而改善转子运行的动态特性,避免共振,提高机组运行的可靠性等,这些都将为解决电力工程中的技术难题提供崭新的思路。
动,有力地推动了纳米电磁致动器的发展。毫无疑问,在某些场合它仍有很大的应用价值。然而,其 位移精度是众多因素(如驱动力和作用时间等)共同作用的结果,任何一个因素的不利变化都会导致位移精度下降。特别是在大驱动力和变载荷情况下,上述影响就更为显著,成为其进一步发展的严重障碍。 本文介绍的电磁-压电组合式纳米致动器,最大的优点就是成功地将位移精度与驱动力分开处理,使其在大驱动力、变载荷和高稳定性纳米驱动方面具有明显的优势。初步的研究已揭示出该组合式纳米致动器具有良好的前景,进一步的研究工作正在进行之中。有理由相信,在不久的将来会有更多更好的纳米组合式致动器出现。 参考文献: [1] 姚健,尤政.21世纪的科技前沿——纳米技术.中国 机械工程,1995,6(3):14~16 [2] 杨辉,吴明根.现代超精密加工技术,航空精密制造 技术,1997,33(1):1~8 [3] 江小宁,周兆英,李勇等.微驱动技术.中国仪器仪 表,1993(2):10~12,14 [4] W AN G W an jun ,L lene Bu sch -V ishn ial .A H igh P recisi on M icropo sitoner Based on M agneto stric 2ti on p rinci p le ,R ev .Sci .In strum ,1992,63(1): 249~254 [5] Douglas P E Sm ith ,Sco tt A E lrod .M agnetically driven m icropo siti oners .R ev .Sci .In strum .,1985,56(10):1970~1971 [6] D avydov D N ,D eltou r R ,Ho rii N .C ryogen ic Scan 2 n ing T unnelingM icro scopeW ith a M agnetic Coarse A pp roach ,R ev .Sci .In strum ,1993,64(11):3153~3156 [7] 颜国正,赵国光,余承业.微小型任意行程电磁冲击 式纳米级步距驱动装置及其控制技术的研究.仪器仪表学报,1996,17(4):391~396 [8] B lackfo rd B L ,Jericho M H .A H amm er -A cti on M icropo siti oner fo r Scann ing P robe M icro scopes .R ev .Sci .In strum ,1997,68(1):133~135(编辑 华 恒) 作者简介:杨圣,男,1962年生。中国科学技术大学(合肥市 230026)九系副教授、博士。研究方向为精密仪器与精密工程。获 北京市科技进步三等奖1项。参编教材1部,发表论文20余篇。刘东伟,男,1978年生。南京航空航天大学(南京市210016)机电工程学院硕士研究生。 文章编号:1004-132 (2001)11-1319-04 动力磁悬浮轴承的研究现状及关键技术 曾 励 副教授 曾 励 陈 飞 宋爱平 黄民双 摘要:提出一种新型的机电一体化产品——具有电机功能的动力磁悬浮 轴承,阐述了它的研究现状和工作原理,分析了它的应用特点,并介绍了动力磁悬浮轴承理论研究的关键技术。 关键词:动力磁悬浮轴承;旋转偏磁磁通;旋转控制磁通;旋转机械;无轴 承电机 中图分类号:TH 703.3;TM 32 文献标识码:A 1 动力磁悬浮轴承的提出及特点 实现旋转机械高速、大负荷运转的关键是支承转子的轴承和驱动电机的性能。采用传统的支承及驱动方式,必须对支承转子及驱动电机的各机械轴承进行油雾或油液润滑,需要有经验和技术的人员进行调整,而且非常麻烦。这种支承驱动 收稿日期:1999—10—26 基金项目:江苏省教育基金资助项目(00KJB 460009) 方式,轴向尺寸过大,可靠性差,而且由于共振频 率低,无法得到高速和超高速的转动。如果能研制出一种具有电机功能的动力磁悬浮轴承,就可以将旋转机械的驱动电机去掉,由动力磁悬浮轴承支承转子并直接驱动其转动,使结构小型化,并真正实现高速、大负荷运转。 动力磁悬浮轴承(pow er m agnetic bearing ,P -M B )在原理上是以普通的磁悬浮轴承为基础,使其电磁铁提供的磁场不仅要产生支承转子的径向力,而且还要产生驱动转子的扭矩,是集电动机 ? 9131?动力磁悬浮轴承的研究现状及关键技术——曾 励 陈 飞 宋爱平等
磁悬浮轴承 3分(内容丰富) 编辑词条 摘要 磁悬浮轴承(Magnetic Bearing) 是利用磁力作用将转子悬浮于空中,使转子与定子之间没有机械接触。其原理是磁感应线与磁浮线成垂直,轴芯与磁浮线是平行的,所以转子的重量就固定在运转的轨道上,利用几乎是无负载的轴芯往反磁浮线方向顶撑,形成整个转子悬空,在固定运转轨道上。与传统的滚珠轴承、滑动轴承以及油膜轴承相比,磁轴承不存在机械接触,转子可以运行到很高的转速,具有机械磨损小、能耗低、噪声小、寿命长、无需润滑、无油污染等优点,特别适用于高速、真空、超净等特殊环境中。磁悬浮事实上只是一种辅助功能,并非是独立的轴承形式,具体应用还得配合其它的轴承形式,例如磁悬浮+滚珠轴承、磁悬浮+含油轴承、磁悬浮+汽化轴承等等。这项技术并没有得到欧美国家的认可。 编辑摘要 目录-[ 隐藏 ] 1.1概述 2.2工作原理 编辑本段|回到顶部概述 利用磁力使物体处于无接触悬浮状态的 设想由来已久, 但实现起来并不容易。早在 1842 年, Ea rn show 就证明: 单靠永久磁体是 不能将一个铁磁体在所有 6 个自由度上都保
持在自由稳定的悬浮状态的.然而, 真正意义 上的磁悬浮研究是从本世纪初的利用电磁相 吸原理的悬浮车辆研究开始的。 1937 年, Kenp er 申请了第一个磁悬浮 技术专利, 他认为要使铁磁体实现稳定的磁 悬浮, 必须根据物体的悬浮状态不断的调节 磁场力的大小, 即采用可控电磁铁才能实现, 这一思想成为以后开展磁悬浮列车和磁悬浮 轴承研究的主导思想。伴随着现代控制理论 和电子技术的飞跃发展, 本世纪 60 年代中期 对磁悬浮技术的研究跃上了一个新台阶。英 国、日本、德国都相继开展了对磁悬浮列车的 研究。磁悬浮轴承的研究是磁悬浮技术发展 并向应用方向转化的一个重要实例。据有关 资料记载: 1969 年, 法国军部科研实验室 (L RBA ) 开始对磁悬浮轴承的研究; 1972 年, 将第一个磁悬浮轴承用于卫星导向轮的支撑 上, 从而揭开了磁悬浮轴承发展的序幕。此 后, 磁悬浮轴承很快被应用到国防、航天等各 个领域。美国在 1983 年 11 月搭载于航天飞 机上的欧洲空间试验仓里采用了磁悬浮轴承 真空泵; 日本将磁悬浮轴承列为 80 年代新的 加工技术之一, 1984 年, S2M 公司与日本精 工电子工业公司联合成立了日本电磁轴承公 司, 在日本生产、销售涡轮分子泵和机床电磁 主轴等。经过 30 多年的发展, 磁悬浮轴承在 国外的应用场合进一步扩大, 从应用角度看, 在高速旋转和相关高精度的应用场合磁悬浮 轴承具有极大的优势并已逐渐成为应用研究 的主流。 编辑本段|回到顶部工作原理 磁悬浮轴承是一个复杂的机电耦合系 统。在早期的研究过程中, 它由机械系统和 控
分子泵用磁悬浮轴承 摘要:磁悬浮轴承以其无摩擦、不需润滑的特点,成为解决真空分子泵油污染、多角度安装等多种问题的最佳方案之一。真空分子泵的行业标准和工业需求,对磁悬浮轴承的设计提出了较高的要求。针对分子泵的特点,设计了5自由度主动控制的磁悬浮轴承,通过系统辨识获得了准确的系统模型,通过对系统模态的抑制,达到了良好的控制效果。经过实验测量,采用磁悬浮轴承支承的分子泵的性能完全达到了工业要求。 关键词:磁悬浮;磁轴承;分子泵 Magnetic bearing for molecular pump Abstract: The magnetic bearing has been one of best solutions for molecular pumps to solve the problems of oil pollution and installation in any orientation since its contactless and oil-free properties. The industry standard and demands of molecular pumps require high design level of magnetic bearing. The magnetic bearings have achieved good performance by 5-axis active control, identifying accurate models and reducing vibration levels. The experiment results show molecular pumps with magnetic bearings completely meet the industry requirements Key words: magnetic suspension, active magnetic bearing, molecular pump 0 引言 分子泵是利用高速旋转的转子把动量传输给气体分子,使之获得定向速度,从而被压缩、被驱向排气口后为前级抽走的一种真空泵[1]。其应用领域包括分析、半导体工业、光学、玻璃工业、涂层技术、真空冶炼、检漏技术、科研设备、照明用具行业等。为解决生产中传统分子泵润滑油蒸汽返流和滚珠轴承引起的振动问题,1976年德国LEYBOLD公司首先开发出了磁悬浮涡轮分子泵[2]。其径向采用永磁悬浮轴承,轴向采用电磁悬浮轴承,即单自由度主动控制,称为1轴磁悬浮分子泵。之后相继出现了3轴磁悬浮分子泵和5轴磁悬浮分子泵。目前工业生应用中5轴磁悬浮分子泵占有主流地位。除LEYBOLD公司外,德国PFEIFFER公司,法国ALCATEL公司,英国BOCEDWARDS公司,日本岛津公司等都有成熟的磁悬浮分子泵产品。目前,世界上有超过60000台的磁悬浮分子泵运行在工业现场。 为追赶与国外的技术差距,提高国内装备水平,开发自主知识产权的磁悬浮分子泵产品具有重要的产业和社会意义。 1 分子泵对磁悬浮轴承的要求 分子泵的转子需要高速旋转,因而要求磁悬浮轴承转子能够达到较高的转速,某些情况需要超临界运行。受材料和加工条件的限制,国产分子泵转子叶轮允许的最高转速一般在30000rpm以内。以CXF1800型分子泵为例,其额定转速为27000rpm,文中未作特殊说明均针对为此型号分子泵配套的FS450型磁悬浮轴承。 分子泵转子的高速旋转必然产生振动,这对于真空应用设备是有危害的,但是国家标准中并没有给出分子泵振动的定量指标[3],国内真空行业对泵体振动的要求一般为小于0.1um。 1
第25卷 第4期 2008年8月 黑龙江大学自然科学学报J OURNAL OF NATURAL SC IENCE O F HE I LONG JI ANG UN IVERS I TY V o l 125N o 14A ugust ,2008 磁悬浮轴承的H ]控制B L M I 方法 刘 雨, 段广仁 (哈尔滨工业大学控制理论与制导技术研究中心,哈尔滨150001) 摘 要:研究了具有参数不确定性的主动磁悬浮系统的控制问题。对系统模型的参数不确定 性进行了分析,并把其归结为标准的H ]设计问题。综合考虑系统的稳定性和调节时间等指标,采用具有闭环区域极点约束的最优H ]状态反馈控制器设计方法,使用线性矩阵不等式(LM I)方法对其进行求解。仿真结果表明,闭环系统在所考虑的参数不确定范围内具有鲁棒稳定性和良好的时域性能指标。 关键词:磁悬浮轴承;H ]控制;闭环极点约束;线性矩阵不等式 中图分类号:TP13文献标志码:A 文章编号:1001-7011(2008)04-0437-05 收稿日期:2008-03-12 基金项目:国家自然科学基金重大国际合作项目(60710002);长江学者创新团队发展计划资助项目;黑龙江省重点基金资助项目(ZJ C603)作者简介:刘 雨(1983-),男,硕士,主要研究方向:磁悬浮轴承系统控制,E -m ai:l freerly @gma i .l co m 通讯作者:段广仁(1962-),男,教授,博士,博士生导师,长江学者特聘教授1 引 言 磁悬浮轴承与传统轴承相比有其独特的优点,其不存在机械接触,机械磨损小、能耗低、噪声小、寿命长、无需润滑、无油污染,特别适用高速、真空、超净等特殊环境。由于以上特点,磁悬浮轴承在民用和国防领域都有着广泛的应用。本文所研究的主动磁轴承,即有源磁轴承,它的磁场是可控的,其磁力由交流线圈产生的磁场提供,通过改变线圈的电流即可控制磁力的大小,这是目前研究和应用最为广泛的一种磁悬浮轴承技术。 磁悬浮轴承系统是一种复杂的非线性系统,并且开环是极不稳定的,因此,对控制方法的研究一直是磁悬浮技术中的热点问题。文献[1]对磁悬浮轴承状态空间描述的模型进行了二次稳定的H ]控制器设计,文献[2]对储能飞轮的磁轴承进行了鲁棒控制器的设计,文献[3]对磁浮轴承的鲁棒控制问题进行了较全面的分析和讨论。 结合文献[4-5]等的理论研究成果,本文针对磁悬浮轴承的一种较为成熟的线性化模型进行研究,分析了建模过程和系统运行所导致的模型参数不确定性,根据具有闭环极点约束的H ]控制理论进行控制器设计,最后,应用线性矩阵不等式的方法进行求解,得到了易于在工程实际中应用的控制参数,对磁浮轴承后续的现场调试有很好的理论指导意义。 2 问题描述 主动式单自由度磁悬浮轴承系统的二阶线性化模型为 [6]G (s)= k i m s 2-k x (1) 其中,m 是磁浮轴承转子的质量或等效质量; k x =L 0A 0N 2i 20x 30 为磁力轴承位移-力刚度;k i =L 0A 0N 2i 0x 20 为磁力轴承的电流-力刚度。
磁悬浮轴承
摘要 磁悬浮轴承(Magnetic Bearing) 是利用磁力作用将转子悬浮于空中,使转子与定子之间没有机械接触。其原理是磁感应线与磁浮线成垂直,轴芯与磁浮线是平行的,所以转子的重量就固定在运转的轨道上,利用几乎是无负载的轴芯往反磁浮线方向顶撑,形成整个转子悬空,在固定运转轨道上。与传统的滚珠轴承、滑动轴承以及油膜轴承相比,磁轴承不存在机械接触,转子可以运行到很高的转速,具有机械磨损小、能耗低、噪声小、寿命长、无需润滑、无油污染等优点,特别适用于高速、真空、超净等特殊环境中。磁悬浮事实上只是一种辅助功能,并非是独立的轴承形式,具体应用还得配合其它的轴承形式,例如磁悬浮+滚珠轴承、磁悬浮+含油轴承、磁悬浮+汽化轴承等等。这项技术并没有得到欧美国家的认可。 目录 1 磁悬浮轴承概述 2 磁悬浮轴承工作原理 1 磁悬浮轴承概述 利用磁力使物体处于无接触悬浮状态的设想由来已久, 但实现起来并不容易。早在1842 年, Ea rn show 就证明: 单靠永久磁体是不能将一个铁磁体在所有 6 个自由度上都保持在自由稳定的悬浮状态的.然而, 真正意义上的磁悬浮研究是从本世纪初的利用电磁相吸原理的悬浮车辆 研究开始的。 1937 年, Kenp er 申请了第一个磁悬浮技术专利, 他认为要使铁磁体实现稳定的磁悬浮, 必须根据物体的悬浮状态不断的调 节磁场力的大小, 即采用可控电磁铁才能实现,这一思想成为以后开展磁 悬浮列车和磁悬浮轴承研究的主导思想。伴随着现代控制理论和电子技 术的飞跃发展, 本世纪 60 年代中期对磁悬浮技术的研究跃上了一个新 台阶。英国、日本、德国都相继开展了对磁悬浮列车的研究。磁悬浮 轴承的研究是磁悬浮技术发展并向应用方向转化的一个重要实例。据有 关资料记载: 1969 年, 法国军部科研实验室(L RBA ) 开始 对磁悬浮轴承的研究; 1972 年,将第一个磁悬浮轴承用于卫星导向轮的 支撑上, 从而揭开了磁悬浮轴承发展的序幕。此后, 磁悬浮轴承很快被
磁悬浮轴承的原理 王养丽 (西安武警工程学院物理教研室,西安三桥 710086) (收稿日期:2000-02-16;修回日期:2000-05-15) 摘 要 本文介绍国内外磁悬浮轴承技术的发展历史现状,以及它的物理原理. 关键词 磁悬浮轴承;电磁力;基本原理 THE PRINCIPLE OF MAGNETIC SUSPENSION BEARING Wang YangLi (Engin eering College of Armed Police Force,Xi'an.710086) Abstract T his paper intro duces the physical pr inciple and the development and research status of m agnetic suspensio n bearing. Key Words magnetic suspersio n bearing;electr omagnetic force;principle 磁悬浮轴承也称电磁轴承或磁力轴承,是利用磁场力将轴承无机械摩擦、无润滑地悬浮在空间的一种新型高性能轴承。由于它具有一系列独特的优点,近年来对其研究颇为重视。又因为磁悬浮轴承技术涉及多个领域,多项技术的交织在其中表现突出,研究和开发利用的难度较大,对其研究力度正在进一步加强。 1 磁悬浮轴承概述 利用磁力使物体处于无接触悬浮状态的设想由来已久,但实现起来并不容易。早在1842年,Ear nsho w就证明:单靠永久磁体是不能将一个铁磁体在所有6个自由度上都保持在自由稳定的悬浮状态的。然而,真正意义上的磁悬浮研究是从本世纪初的利用电磁相吸原理的悬浮车辆研究开始的。 1937年,Kenper申请了第一个磁悬浮技术专利,他认为要使铁磁体实现稳定的磁悬浮,必须根据物体的悬浮状态不断的调节磁场力的大小,即采用可控电磁铁才能实现,这一思想成为以后开展磁悬浮列车和磁悬浮轴承研究的主导思想。伴随着现代控制理论和电子技术的飞跃发展,本世纪60年代中期对磁悬浮技术的研究跃上了一个新台阶。英国、日本、德国都相继开展了对磁悬浮列车的研究。磁悬浮轴承的研究是磁悬浮技术发展并向应用方向转化的一个重要实例。据有关资料记载:1969年,法国军部科研实验室(LRBA)开始对磁悬浮轴承的研究;1972年,将第一个磁悬浮轴承用于卫星导向轮的支撑 35 工科物理 Vol.10 No.3 2000
《Matlab仿真技术》 设计报告 题目磁悬浮系统建模及其PID控制器设计专业班级电气工程及其自动化 11**班 学号 7 学生 ** 指导教师 ** 学院名称电气信息工程学院 完成日期: 2014 年 5 月 7 日
磁悬浮系统建模及其PID控制器设计 Magnetic levitation system based on PID controller simulation 摘要 磁悬浮技术具有无摩擦、无磨损、无需润滑以及寿命较长等一系列优点,在能源、交通、航空航天、机械工业和生命科学等高科技领域有着广泛的应用背景。 随着磁悬浮技术的广泛应用,对磁悬浮系统的控制已成为首要问题。本设计以PID 控制为原理,设计出PID控制器对磁悬浮系统进行控制。 在分析磁悬浮系统构成及工作原理的基础上,建立磁悬浮控制系统的数学模型,并以此为研究对象,设计了PID控制器,确定控制方案,运用MATLAB软件进行仿真,得出较好的控制参数,并对磁悬浮控制系统进行实时控制,验证控制参数。最后,本设计对以后研究工作的重点进行了思考,提出了自己的见解。 PID控制器自产生以来,一直是工业生产过程中应用最广、也是最成熟的控制器。目前大多数工业控制器都是PID控制器或其改进型。尽管在控制领域,各种新型控制器不断涌现,但PID控制器还是以其结构简单、易实现、鲁棒性强等优点,处于主导地位。 关键字:磁悬浮系统;PID控制器;MATLAB仿真
一、磁悬浮技术简介 1.概述: 磁悬浮是利用悬浮磁力使物体处于一个无摩擦、无接触悬浮的平衡状态,磁悬浮看起来简单,但是具体磁悬浮悬浮特性的实现却经历了一个漫长的岁月。由于磁悬浮技术原理是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体的典型的机电一体化高新技术。伴随着电子技术、控制工程、信号处理元器件、电磁理论及新型电磁材料的发展和转子动力学的进一步的研究,磁悬浮随之解开了其神秘一方面。 1900年初,美国,法国等专家曾提出物体摆脱自身重力阻力并高效运营的若干猜想--也就是磁悬浮的早期模型。并列出了无摩擦阻力的磁悬浮列车使用的可能性。然而,当时由于科学技术以及材料局限性磁悬浮列车只处于猜想阶段,未提出一个切实可行的办法来实现这一目标。 1842年,英国物理学家Earnshow就提出了磁悬浮的概念,同时指出:单靠永久磁铁是不能将一个铁磁体在所有六个自由度上都保持在自由稳定的悬浮状态。 1934年,德国的赫尔曼·肯佩尔申请了磁悬浮列车这一的专利。 在20世纪70、80年代,磁悬浮列车系统继续在德国蒂森亨舍尔测试和实施运行。德国开始命名这套磁悬浮系统为“磁悬浮”。 1966年,美国科学家詹姆斯·鲍威尔和戈登·丹比提出了第一个具有实用性质的磁悬浮运输系统。 1970年代以后,随着世界工业化国家经济实力的不断加强,为提高交通运输能力以适应其经济发展的需要,德国、日本、美国、加拿大、法国、英国等发达国家相继开始筹划进行磁悬浮运输系统的开发。 2009年时,国外研究的热点是磁悬浮轴承和磁悬浮列车,而应用最广泛的是磁悬浮轴承。它的无接触、无摩擦、使用寿命长、不用润滑以及高精度等特殊的优点引起世界各国科学界的特别关注,国外学者和企业界人士都对其倾注了极大的兴趣和研究热情。 2. 磁悬浮技术的应用及展望 20世纪60年代,世界上出现了3个载人的气垫车试验系统,它是最早对磁悬浮列车进行研究的系统。随着技术的发展,特别是固体电子学的出现,使原来十分庞大的控制设备变得十分轻巧,这就给磁悬浮列车技术提供了实现的可能。1969年,德国牵引机车公司的马法伊研制出小型磁悬浮列车模型,以后命名为TR01型,该车在1km 轨道上的时速达165km,这是磁悬浮列车发展的第一个里程碑。在制造磁悬浮列车的