Stability of synchronous chaos and on-off intermittency in coupled map lattices 1997_0
- 格式:pdf
- 大小:174.43 KB
- 文档页数:8
石 油 炼 制 与 化 工 2021年第52卷zeolite[J].JournalofIndustrialandEngineeringChemistry,2013,19(3):915 919[9] MierD,AguayoAT,GayuboAG,etal.Catalystdiscriminationforolefinproductionbycoupledmethanol?狀 butanecracking[J].AppliedCatalysisA:General,2010,383(1?2):202 210[10]MierD,GayuboAG,AguayoAT,etal.Olefinproductionbycofeedingmethanoland狀 butane:KineticmodelingconsideringthedeactivationofHZSM 5zeolite[J].AIChEJournal,2011,57(10):2841 2853[11]MierD,AguayoAT,GayuboAG,etal.Synergiesintheproductionofolefinsbycombinedcrackingof狀 butaneandmethanolonaHZSM 5zeolitecatalyst[J].ChemicalEngineeringJournal,2010,160(2):760 769[12]WeiShumei,XuYarong,JinZhaoyang,etal.Co conversionofmethanoland狀 hexaneintoaromaticsusingintergrownZSM 5?ZSM 11asacatalyst[J].FrontiersofChemicalScienceandEngineering,2020,14:783 792[13]魏书梅,徐亚荣,李琪蓉,等.甲醇耦合抽余油芳构化反应催化剂制备及其性能研究[J].石油炼制与化工,2021,52(6):11 17[14]常福祥.正己烷与甲醇在分子筛催化剂上耦合反应的机理研究[D].大连:中国科学院大连化学物理研究所,2006[15]SuChang,QianWeizhong,XieQing,etal.ConversionofmethanolwithC5-C6hydrocarbonsintoaromaticsinatwo stagefluidizedbedreactor[J].CatalysisToday,2016,264:63 69犛犜犝犇犢犗犉犜犎犈犆犗犝犘犔犐犖犌犃犚犗犕犃犜犐犣犃犜犐犗犖犗犉犔犐犌犎犜犎犢犇犚犗犆犃犚犅犗犖犛犠犐犜犎犕犈犜犎犃犖犗犔WeiShumei(犚犲狊犲犪狉犮犺犐狀狊狋犻狋狌狋犲狅犳犝狉狌犿狇犻犘犲狋狉狅犮犺犲犿犻犮犪犾犆狅犿狆犪狀狔,犘犲狋狉狅犆犺犻狀犪,犝狉狌犿狇犻830019)犃犫狊狋狉犪犮狋:Undertheconditionsofareactiontemperatureof400℃,areactionpressureof0.50MPa(N2atmosphere),amassspacevelocityof1.0h-1andalighthydrocarbon?methanolmassratioof1∶1,thecouplingaromatizationofmethanolwiththreelighthydrocarbonfeedstocksofreformertoppedoil,aromaticsraffinateoilandreformerpentaneoilwerestudied.Theresultsshowedthattheconversionofmethanolwas100%within72hours.Thecontentofisopentaneinpentaneoilwasthehighestandtheyieldofaromaticsrangedfrom26.30%to35.13%,whilethecontentofisopentaneinthereformertoppedoilwasthelowestandtheyieldofaromaticsrangedfrom24.81%to34.56%inthecouplingaromatizationofmethanolwiththereformertoppedoilduringthereaction.Aromatichydrocarbonswereproducedbyisomerization,aromatization,cyclizationandhydrogentransfer,andalargenumberof狀 alkanesreacted.Whentheraffinateoilreactedwithmethanol,theconversionof狀 pentanewas97.19%,theconversionof狀 hexanewas94.26%,andthemassfractionofaromaticswasincreasedfrom1.56%to39.44%.犓犲狔犠狅狉犱狊:lighthydrocarbon;methanol;coulping;櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫸櫐櫐櫐櫐櫐櫐櫐櫐櫐櫐櫐櫐殾殾殾殾aromatization简 讯碳酸乙烯酯加氢制乙二醇项目通过中试考核和工艺包评审近日,由惠生工程公司、天津大学和华东理工大学联合开发的碳酸乙烯酯加氢合成乙二醇联产甲醇中试项目通过72h连续满负荷运行性能考核和100kta规模基础数据工艺包评审。
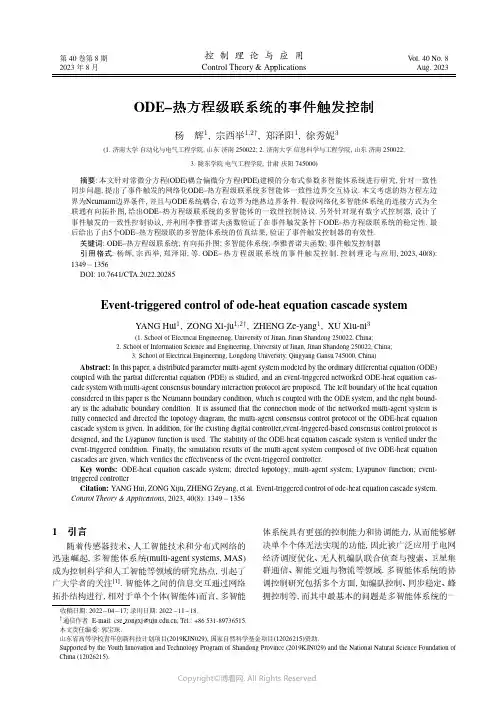
第40卷第8期2023年8月控制理论与应用Control Theory&ApplicationsV ol.40No.8Aug.2023 ODE–热方程级联系统的事件触发控制杨辉1,宗西举1,2†,郑泽阳1,徐秀妮3(1.济南大学自动化与电气工程学院,山东济南250022;2.济南大学信息科学与工程学院,山东济南250022;3.陇东学院电气工程学院,甘肃庆阳745000)摘要:本文针对常微分方程(ODE)耦合偏微分方程(PDE)建模的分布式参数多智能体系统进行研究,针对一致性同步问题,提出了事件触发的网络化ODE–热方程级联系统多智能体一致性边界交互协议.本文考虑的热方程左边界为Neumann边界条件,并且与ODE系统耦合,右边界为绝热边界条件.假设网络化多智能体系统的连接方式为全联通有向拓扑图,给出ODE–热方程级联系统的多智能体的一致性控制协议.另外针对现有数字式控制器,设计了事件触发的一致性控制协议,并利用李雅普诺夫函数验证了在事件触发条件下ODE–热方程级联系统的稳定性.最后给出了由5个ODE–热方程级联的多智能体系统的仿真结果,验证了事件触发控制器的有效性.关键词:ODE–热方程级联系统;有向拓扑图;多智能体系统;李雅普诺夫函数;事件触发控制器引用格式:杨辉,宗西举,郑泽阳,等.ODE–热方程级联系统的事件触发控制.控制理论与应用,2023,40(8): 1349–1356DOI:10.7641/CTA.2022.20285Event-triggered control of ode-heat equation cascade systemYANG Hui1,ZONG Xi-ju1,2†,ZHENG Ze-yang1,XU Xiu-ni3(1.School of Electrical Engineering,University of Jinan,Jinan Shandong250022,China;2.School of Information Science and Engineering,University of Jinan,Jinan Shandong250022,China;3.School of Electrical Engineering,Longdong University,Qingyang Gansu745000,China)Abstract:In this paper,a distributed parameter multi-agent system modeled by the ordinary differential equation(ODE) coupled with the partial differential equation(PDE)is studied,and an event-triggered networked ODE-heat equation cas-cade system with multi-agent consensus boundary interaction protocol are proposed.The left boundary of the heat equation considered in this paper is the Neumann boundary condition,which is coupled with the ODE system,and the right bound-ary is the adiabatic boundary condition.It is assumed that the connection mode of the networked multi-agent system is fully connected and directed the topology diagram,the multi-agent consensus control protocol of the ODE-heat equation cascade system is given.In addition,for the existing digital controller,event-triggered-based consensus control protocol is designed,and the Lyapunov function is used.The stability of the ODE-heat equation cascade system is verified under the event-triggered condition.Finally,the simulation results of the multi-agent system composed offive ODE-heat equation cascades are given,which verifies the effectiveness of the event-triggered controller.Key words:ODE-heat equation cascade system;directed topology;multi-agent system;Lyapunov function;event-triggered controllerCitation:YANG Hui,ZONG Xiju,ZHENG Zeyang,et al.Event-triggered control of ode-heat equation cascade system. Control Theory&Applications,2023,40(8):1349–13561引言随着传感器技术、人工智能技术和分布式网络的迅速崛起,多智能体系统(multi-agent systems,MAS)成为控制科学和人工智能等领域的研究热点,引起了广大学者的关注[1].智能体之间的信息交互通过网络拓扑结构进行,相对于单个个体(智能体)而言,多智能体系统具有更强的控制能力和协调能力,从而能够解决单个个体无法实现的功能,因此被广泛应用于电网经济调度优化、无人机编队联合侦查与搜索、卫星集群通信、智能交通与物流等领域.多智能体系统的协调控制研究包括多个方面,如编队控制、同步稳定、蜂拥控制等,而其中最基本的问题是多智能体系统的一收稿日期:2022−04−17;录用日期:2022−11−18.†通信作者.E-mail:cse**************.cn;Tel.:+86531-89736515.本文责任编委:郭宝珠.山东省高等学校青年创新科技计划项目(2019KJN029),国家自然科学基金项目(12026215)资助.Supported by the Youth Innovation and Technology Program of Shandong Province(2019KJN029)and the National Natural Science Foundation of China(12026215).1350控制理论与应用第40卷致性问题[2–6].一致性问题的研究成为各类企业提高生产率的关键,蓝宝石生产工艺便是其中之一.工业蓝宝石是氧化铝的晶体,是国民经济、国防工业和科学技术发展必不可少的基础材料和重要的战略物资[7].在蓝宝石结晶初期,融融状态的蓝宝石引晶点处温度检测和控制对后续整个结晶过程起到至关重要的作用,由于工业蓝宝石的熔点温度为2050◦C,所以目前不存在有效的自动温度检测手段与检测设备来获得如此高温,工程中现行的检测方法是利用一根细长的、外部包裹了透明合金材料的晶体深入加热炉内,并置细晶体棒的一端于熔融状态的蓝宝石中心上方2∼3cm,通过人眼不定期地观察晶体棒端点来近似估计熔融状态蓝宝石中心的温度.很多蓝宝石企业,为了提高成产效率,引入了多智能体系统.在工业生产中,将多台加热炉联接成网络,通过控制其中部分加热,利用加热炉之间的信息传递,可以实现自动化与网络化同步控制,既能节约成本又能提高生产效率,这就是本文要研究的网络化系统的状态一致性控制问题.目前,一方面由于实际工程中许多系统模型均不能质点化,并且一、二阶常微分方程(ordinary differen-tial equation,ODE)建模的多智能体系统相对完善,但基于偏微分方程(partial different equation,PDE)建模的多智能体系统的研究没有得到同样程度的重视,所以在这方面存在很大的挖掘空间[8–10].一般来说,利用ODE或PDE对一些系统建模都不能完美的接近实际的模型,但ODE与PDE相互耦合的级联系统却能完美的逼近实际系统[11–13].其中,由于大部分实际工程的需要,如水利、钻井、电加热炉等常见工业生产模型,其分布参数控制系统往往需要在边界耦合集中参数控制系统.并且大部分都是通过对边界进行控制.正如文献[14]研究了麦克斯韦方程与热方程的耦合;文献[15]用一类ODE与KDV(korteweg-de vries equa-tion)方程边界级联的形式,来简化存在机械振动的潜水波模型;文献[16]利用反映–扩散–对流方程对冶金固定床内部颗粒发生化学反应的动力学行为进行建模.所以本文选择ODE–热方程级联的方式对蓝宝石加热炉进行建模.另一方面,由于实际传感器测量速度的限制,网络带宽限制以及系统处理速度等各类因素的限制,显然连续时间控制器很难满足控制要求,而离散信号是很容易获取的,并且连续时间控制器的离散和采样已成为有限维多智能体系统的研究热点[5,9].虽然出现了许多优秀的控制方案,但触发频率较高,仍然可能会造成计算资源和能量的不必要损耗.为了解决上述问题,受到文献[10,17–18]等文章的启发,针对ODE–热方程建模的加热炉多智能体系统,为降低控制器的要求,本文提出了事件触发控制方案,并利用Lyapunov 函数验证在事件触发条件下该系统的稳定性.本文所考虑的热方程左边界为Neumann边界条件,与ODE系统耦合,右边界为绝热边界条件,采用这种方式对系统进行建模,更加符合实际工程,并且所有智能体通过全联通有向拓扑进行通信.设计了ODE–热方程级联系统的同步控制器与事件触发的同步控制器,与之比较,事件触发控制值只在触发时刻进行更新,很大程度上,节约了计算资源,降低了控制器的负载.通过Lyapunov稳定性分析,证明了误差系统可以收敛到一致的值,选取5个智能体进行仿真验证,证明了事件触发控制器的有效性.2问题描述2.1代数图论为了便于研究多智能体系统,研究学者引入了图论知识G=(V,E,A),用于分析所有智能体之间的信息交换,其中节点集V={1,2,···,N},代表系统中的每个智能体;边集E=V×V,表示智能体之间的通信连接.N i={j∈V:(i,j)∈V},代表智能体i 的邻点集.邻接矩阵A=[a ij]∈R n×n表示节点之间的连接关系,其中a ij=1表示节点j能够获取节点i 的信息,否则a ij=0.度矩阵D用来描述与之连接的所有节点的连接度.定义节点V i的入度为deginV i= n∑j=1a ji,出度为degoutV i=n∑j=1a ij,那么在图G的度矩阵D=[D ij]中,D ij=0,∀i=j且D ii=deg out V i[8,18–19].2.2模型描述在竞争激烈的今天,每个细节都能决定企业的成功与否.其中制药工程、晶体结晶、发酵工艺等都对温度有严格的要求.正如蓝宝石工艺,在加热的过程中,会形成固体与液体交接的情况.蓝宝石的温度分布应该保证固体与液体交接点的变化满足工程实际需要,即固体与液体交接点的变化速度不能过快或者过慢,否则会导致蓝宝石结晶过程中晶体因受热不均而发生炸裂,或者与加热炉粘连,从而影响晶体质量.然而蓝宝石加热炉是通过给外部的钨棒网通电进行加热的,所以最终目的是通过改变钨棒网的电压来实现温度控制,从而使固液交接点处的温度分布均匀,其加热炉如图1所示.图1中:1表示CCD摄像机;2表示目镜;3表示旋转挡板驱动;4表示旋转挡板把手;5表示挡板;6表示隔热层;7表示孔洞;8表示提拉杆;9表示坩埚壁;10表示籽晶;11表示钨加热器;12表示炉壁;13表示熔融状蓝宝石.利用各向同性性质,归一化处理后,可以将熔融状态的蓝宝石温度分布用抽象的一维反应扩散方程近第8期杨辉等:ODE–热方程级联系统的事件触发控制1351似描述,因此系统模型可表示为˙z i(t)=u i(t),i=1,2,···,N,ωit(x,t)=ωixx(x,t),ωix(0,t)=0,ωix(1,t)=cz i(t),z i(0)=z i,ωi(x,0)=ωi(x),(1)其中:N为智能体的个数,i表示第i个智能体,z(t)表示电源控制器内部的状态变量和加热炉内钨棒网的温度,ω(x,t)为蓝宝石溶液在x位置t时刻的温度分布,其状态空间为H:=L2(0,1),x表示空间坐标.通过对电源z(t)的控制改变蓝宝石温度分布ω(x,t)以保证固体与液体交接点x的变化满足工程实际需要.钨棒网与溶液边界直接耦合,由于位置x的对称性,交接点两侧的温度近似相同,所以交接点不存在热交换,因此可以将另一侧边界假设为绝热条件.图1蓝宝石加热炉Fig.1Sapphire heating furnace根据图论知识,针对具有N个智能体的多智能体系统,第i个智能体的状态为ωi(x,t),若系统中每个智能体的状态都达到一致,需要满足limt→∞∥ωi(x,t)−ωj(x,t)∥H=0,i=j.本文目的是通过控制电源,最终使所有状态能够自发的达成一致,也就是说,液体热量最终能够在各个位置相同.接下来将设计通信交互协议,并证明该通信协议能够使系统稳定,并给出了事件触发控制方案,从而能够节约成本.假设1假设系统(1)的连接方式由全联通有向拓扑图G=(V,E)来描述.图G的拉普拉斯矩阵L可以表示为L=D−A,或常用L(A)=L(G)来表示图G的拉普拉斯矩阵.定义1设X是线性赋范空间,X上的单参数强连续有界线性算子族T(t)称为算子半群,简称C0半群[20].对任何t>0,T(t)都是线性有界算子,且满足T(0)=I,T(t+s)=T(t)T(s),limt→0∥T(t)x−x∥=0,∀x∈X.定义2在线性赋范空间X上满足∥T(t)∥ 1,∀t 0的C0半群称为压缩C0半群.定义3线性赋范空间X上一线性算子A称为耗散的,如果对任意x∈D(A),∃x∗∈D′(A),使Re⟨A x,x∗⟩ 0,若A还满足R(λ−A)=X,∀λ>0,则称A为耗散的[21].定理1设A是线性赋范空间X中的一稠定算子,则以下条件等价:若A是耗散的,且∃λ0>0使得R(λ0−A)=X,则A生成X上的压缩C0半群.若A生成X上的压缩C0半群,则A是耗散的,且R(λ−A)=X,∀λ>0,此外Re⟨A x,x∗⟩ 0,∀x∈D(A),x∗∈D′(A). 2.3一致性控制协议设计由于级联系统存在耦合的边界条件,传统的ODE 或PDE的多智能体一致性控制已不能满足需求,若继续使用传统的一阶多智能体控制器的设计形式,稳定性证明时则会产生不稳定的耦合项,因此本文根据级联系统特性重新设计一致性同步协议并予以证明.对于型如系统(1)的多智能体ODE–热方程级联系统,设计控制器u(t)=−c Lω(1,t)−kIz(t),(2)其中:c>0,k>0均是常数,L是拉普拉斯矩阵,I表示单位矩阵,ω(x,t)和z(t)均为N维向量,将控制器(2)代入系统(1),可以得到级联系统如下:˙z(t)=−c Lω(1,t)−kIz(t),ωt(x,t)=ωxx(x,t),ωx(0,t)=0,ωx(1,t)=cz(t),z(0)=z0,ω(x,0)=ω0(x).(3)引理1(文献[8]引理3.1)对于任意的z(t)∈L2loc(0,∞),ω0(x)∈H2(0,1),系统(3)存在唯一解ω(x,t),使ω(x,t)∈C1(0,∞;L2(0,1))∩C(0,∞; H2(0,1)).此外,通过H2(0,1)⊂C[0,1],那么ω(1,t)对于时间t>0是连续的、有界的.考虑状态空间H=(L2(0,1))N×R N.(4)1352控制理论与应用第40卷定义内积如下:⟨ϕ1,ϕ2⟩H =1ωT1(x,t )L ω2(x,t )d x +12z T1(t )z 2(t ),(5)其中∀ϕi =(ωTi (x,t ),z i (t )),i =1,2.定义算子A :D (A )→H :A (ω(x,t ),z (t ))=(ωxx (x,t ),−c L ω(1,t )−kz (t )),D (A )={(ω,z )∈(H 2(0,1))N ×R N |ωx (0)=0,ωx (1)=cz }.(6)将方程(3)写为发展方程形式如下:˙ϕ(t )=A ϕ(t ).(7)定理2算子A 在空间H 上生成压缩C 0半群.在式(6)中,计算可以得出Re ⟨A ϕ,ϕ⟩=−kz T(t )z (t )−1ωTx (x,t )ωx (x,t )d x 0.(8)因此得出算子A 在空间H 上是能量耗散的,由于初值条件给定,其具有唯一解,因此可以得出A −1存在.根据Sobolev 嵌入定理得出A −1在H 中是紧的.利用定理1(Lumer-Phillips)可以得出,算子A 在空间H 上生成压缩C 0半群.本文的目标是使系统同步,分析可知同步的一个充分条件是使边界无能量流动,同时使得所有状态趋近于0.又由于边界绝热条件的充分条件是使ODE 部分收敛到0,因此初步分析ODE 部分特征值需要为负,而热方程部分系统的特征值所在空间仅有一个零特征值,其余为负.根据以上思路设计的控制器(2).接下来证明在控制器(2)作用下系统的稳定性,定义Lyapunov 函数如下:V =12 10ωT (x,t )L ω(x,t )d x +12z T (t )z (t ).(9)对Lyapunov 函数求导得˙V = 10ωT (x,t )L ωt (x,t )d x +z T (t )z t (t )=10ωT (x,t )L ωxx (x,t )d x +z T(t )(−c L ω(1,t )−kz (t ))=ωT (x,t )L ωx (1,t )− 1ωT x (x,t )L ωx (x,t )d x +z T(t )(−c L ω(1,t )−kz (t ))=cωT (1,t )L z (t )− 1ωT x (x,t )L ωx (x,t )d x −cω(1,t )L z T (t )−kz T(t )z (t )=− 1ωTx (x,t )L ωx (x,t )d x −kz T (t )z (t ) 0.(10)通过LaSalle 不变集原理,可以找出有且仅有一个稳定解收敛,即系统状态最终可以达成同步∥(ω(·,t )),z (t ))∥H →0,t →∞.(11)以上是连续系统ODE–热方程级联系统的控制器及闭环系统的证明.下文将设计事件触发控制器的控制规则,并证明该系统依然保持收敛性能.3事件触发控制器设计上文提到的控制器是时间连续形式的,但是连续控制需要在时间尺度上,不间断的采集并获取信息,同时需要实时不间断的对信息进行处理.由于目前广泛应用的数字式执行器执行测量、运算或输出等操作均有最小时钟周期限制,因此数字式执行器无法做到无限小时刻采样并对信息进行处理.为解决数字式控制难以处理连续性控制的缺点,所以本文提出事件触发的ODE–热方程级联系统一致性控制协议,给出具体的触发条件,在达成触发条件时改变控制输入的值,而其余时刻则保持之前状态不变.这样不仅仅能够解决连续性控制的缺点,同时还可以节约控制器的计算资源.下面介绍事件触发控制器的设计,以及触发条件的确认.根据第2.3节得出的一致性同步协议可以假设ODE–热方程系统事件触发控制器如下:{u (t )=−c L ω(1,t )−kz (t ),t =t k ,u (t )=u (t k ),(12)其中:u (t )为ODE–热方程级联系统事件触发控制器,t ∈[t k ,t k +1),∀k =0,1,2,···且t 0为初始时刻,触发间隔时间点t k 满足t k =arg min t>t k −1{∥e (1,t )∥=σ1∥z (t )∥|c |∥L∥,∥ϵ(t )∥=σ2∥z (t )∥k},(13)其中:argmin 表示∥e (1,t )∥和∥ϵ(t )∥达到最小值时t 的取值,∀σ1,σ2∈R +满足条件∥e (1,t )∥ σ1∥z (t )∥|c |∥L∥,∥ε(t )∥ σ2∥z (t )∥k ,k −σ1−σ2<0.(14)为便于证明在事件触发控制器作用下系统仍保持稳定,首先引入误差系统{e (x,t )=ω(x,t k )−ω(x,t ),ϵ(t )=z (t i )−z (t ),(15)将误差状态(15)代入式(12)中,可以得到控制器在触发时刻的误差表示形式u (t )=−c L e (1,t )−c L ω(1,t )−kϵ(t )−kz (t ).(16)第8期杨辉等:ODE–热方程级联系统的事件触发控制1353为了证明控制器(16)能够使系统(1)的每个子系统保持稳定,并能够使各个子系统最终状态达成一致,利用Lyapunov 稳定性判据对事件触发系统进行稳定性判别.设计Lyapunov 函数如下:V (t )=12(z T(t )z (t )+ 10ωT (x,t )L ω(x,t )d x ).(17)对上式左右两边关于时间变量求导,可得˙V(t )=d d t 12(z T(t )z (t )+ 10ωT (x,t )L ω(x,t )d x )=z T (t )u (t )+ 10ωTt (x,t )L ω(x,t )d x =z T (t )u (t )+ 10ωT xx (x,t )L ω(x,t )d x =z T (t )u (t )+ωT x (x,t )L ω(x,t )|10−10ωT x (x,t )L ωx (x,t )d x =z T(t )u (t )+ωTx (1,t )L ω(1,t )− 1ωT x (x,t )L ωx (x,t )d x.(18)结合耦合边界条件cz (t )=ωx (1,t ),可以得出˙V(t )=−cz T (t )L [e (1,t )+ω(1,t )]−kz T (t )[ϵ(t )+z (t )]+ωT x (1,t )L ω(1,t )−1ωTx (x,t )L ωx (x,t )d x =−ωTx (1,t )L e (1,t )−kz T (t )ϵ(t )−kz t(t )z (t )− 1ω1x ωT x (x,t )L ωx (x,t )d x∥ωx (1,t )∥∥L∥∥e (1,t )∥+k ∥z (t )∥∥ϵ(t )∥−k ∥z (t )∥2−1ωT x (x,t )L ωx (x,t )d x.(19)设∃σ1,σ2>0,满足以下不等式组条件:∥e (1,t )∥ σ1∥z (t )∥|c |∥L∥,∥ε(t )∥ σ2∥z (t )∥k ,k −σ1−σ2<0.(20)事实上,对于∀σ1,σ2∈R +,总是至少存在着一组解满足不等式组(20),这是很容易得出的,因为前两个不等式组在出发时刻∥e (1,t )∥和∥ϵ(t )∥都等于0.所以σ1,σ2>0即可满足要求.并且由于设定参数k >0,所以必然存在σ1+σ2<k 满足第3个不等式.将假设的不等式组代入式(19),可以得出˙V(t ) (k −σ1−σ2)∥z (t )∥∥ϵ(t )∥−k ∥z (t )∥2− 1ωT x (x,t )L ωx (x,t )d x.(21)根据Lyapunov 稳定性判据可以得出,该系统是Ly-apunov 意义下稳定的,同时通过计算其稳定点所构成的不变集,容易得出最终有且仅有一个共同收敛的点,因此该ODE–热方程级联系统事件触发控制器最终能够使得系统(1)中的状态达成一致.根据不等式组(20)的条件,对于k =1,2,···,以及σ1,σ2满足式(20)条件,设触发时刻为t k =arg min t>t k −1{∥e (1,t )∥=σ1∥z (t )∥|c |∥L∥,∥ϵ(t )∥=σ2∥z (t )∥k}.(22)通过上述证明,可以得出控制器u (t )在式(12)的作用下能够使系统(1)最终状态达成一致.由于PDE 部分边界条件经由ODE 中的控制器引入了负实部极点,因此系统具有一定的鲁棒性,即存在一定的扰动的情况下,系统仍然可以按照预期的目标达成一致,下面针对上述事件触发一致性协议设计计算机仿真程序来进行验证.4数值仿真验证为验证ODE–热方程级联系统事件触发一致性控制协议的实际有效性,本文采用数字计算机平台进行仿真模拟验证.这里仿真离散格式中,对于空间采用中心差分法进行离散,时间采用前向差分方法进行离散化,ODE 部分采用前向差分离散化.选取仿真步长d t =0.001s,空间步长d x =0.05m,仿真总时长T =15s,PDE 选取长度为1m.设系统参数c =5,k =10/3.假设系统仿真的初值条件如下:ω(x,0)= 4+2sin(2πx +1)+0.7(x −0.5)−2+1.4sin(3πx +2)−0.4(x −0.7)9−6sin(1.5πx +3)−0.9(x −0.3)9−1.4sin(2πx +2)+0.9(x −0.4)4−2sin(1.5πx +1)+0.7(x −0.2),z (0)=[412−1−4]T ,考虑多智能体个数为5,且为全连通有向拓扑,假设权重均为1,其连接方式如图2.通过上述假设的参数进行仿真,能够得出仿真所用控制系统如下:˙z (t )=−5 1−100001−100001−100001−1−10001 ω(1,t )−103z (t ),ωt (x,t )=ωxx (x,t ),ωx (0,t )=0,ωx (1,t )=5z (t ).(23)1354控制理论与应用第40卷因此根据本文所给出的计算方法,设计控制器u(t)=˙z(t)=−51−100001−100001−100001−1−10001ω(1,t)−103z(t),u(t)=u(t k),t∈(t k,t k+1),t k=arg mint>t k−1{∥e(1,t)∥=σ1∥z(t)∥|c|∥L∥,∥ϵ(t)∥=σ2∥z(t)∥k}.(24)其中选取σ1=0.43,σ2=11.1.仿真结果如图3–10所示.图2多智能体连接拓扑图Fig.2Multi-agent connectiontopology图3多智能体系统ODE部分状态图Fig.3Partial ODE state diagram of multi-agentsystem图4多智能体系统PDE部分状态1Fig.4Multi-agent system PDE partial State1图5多智能体系统PDE部分状态2Fig.5Multi-agent system PDE partial State2图6多智能体系统PDE部分状态3Fig.6Multi-agent system PDE partial State3图7多智能体系统PDE部分状态4Fig.7Multi-agent system PDE partial State4图3描述了多智能体系统(24)中的ODE部分随时间趋向于0,其物理含义是为了最终使PDE系统能够稳定在一致温度下,热系统边界随着时间增加,其热流动逐渐停止.图4–8五个多智能体系统的PDE部分在边界耦合ODE系统的控制下,最终能够收敛到一致状态.图9–10表示了多智能体共同决策得出的触发条件,其中触发时刻用“*”着重标记.根据仿真结果可以看出,通过利用本文提出的基于事件触发的ODE–热方程级联系统多智能体一致性控制协议,能够使系统在大约12s左右通过较少的触发次数达到同步,表第8期杨辉等:ODE–热方程级联系统的事件触发控制1355明事件触发控制器具有优越的性能,能在很短的时间内让蓝宝石加热炉达到一致的工作状态.图8多智能体系统PDE部分状态5Fig.8Multi-agent system PDE partial State5图9多智能体系统事件触发条件1Fig.9Multi-agent system event trigger Condition1图10多智能体系统事件触发条件2Fig.10Multi-agent system event trigger Condition25结论与展望本文研究了基于事件触发的ODE–热方程级联系统多智能体一致性控制协议的设计,通过控制与PDE部分边界耦合的ODE系统的输入,使PDE部分的热系统最终能够稳定,快速的达成一致,进一步给出了事件触发控制的条件,通过仿真验证可以看出该同步协议具有一定的鲁棒性.相较于之前已有的成果来说,本文的创新在于采用不同的(Neumann)边界条件,控制输入和被控对象分别处于不同的系统,同步采用边界反馈,并证明了事件触发需要满足的条件及其稳定性,但因本文系统存在耦合项,Zeno现象的避免未能给出严格的证明,这将在后续的工作中进行.参考文献:[1]TIAN Yuan.Consensus control for multi-agent systems with impul-sive effects.Chongqing:Southwest University,2020.(田袁.脉冲作用下的多智能体系统一致性控制.重庆:西南大学, 2020.)[2]JI Lianghao,LIAO Xiaofeng.Consensus analysis of multi-agent sys-tem with multiple time delays.Journal of Physics,2012,61(15):8–16.(纪良浩,廖晓峰.具有不同延时的多智能体系统一致性分析.物理学报,2012,61(15):8–16.)[3]FU Q,YU P F,XU G Z,et al.Containment control for partial differ-ential multi-agent systems.Physica A:Statistical Mechanics and its Applications,2019,529:121549.[4]ZHOU Tuo,LIU Quanli,WANG Dong,et al.Leader-following con-sensus for linear multi-agent systems based on integral-type event-triggered strategy.Control and Decision,2022,37(5):1258–1266.(周托,刘全利,王东,等.积分事件触发策略下的线性多智能体系统领导跟随一致性.控制与决策,2022,37(5):1258–1266.)[5]OLFATI-SABER R,MURRAY R.Consensus problems in networksof agents with switching topology and time-delays.IEEE Transac-tions on Automatic Control,2004,49(9):15201533.[6]XIE Jun,CHEN Kaixuan,YUE Dong.Distributed economic dispatchbased on consensus algorithm of multi agent system for power sys-tem.Electric Power Automation Equipment,2016,36(2):112–117.(谢俊,陈凯旋,岳东.基于多智能体系统一致性算法的电力系统分布式经济调度策略.电力自动化设备,2016,36(2):112–117.)[7]LI L C,FENG J S.Current situation and development trend of sap-phire crystal growth technology in China.Journal of Synthetic Crys-tals,2012,41(S1):221–226.[8]MENG X Y,MENG Z Y,CHEN T W,et al.Pulse width modulationfor multi-agent systems.Automatica,2013,49(7):2125–2132.[9]XI J X,WANG C,YANG X J,et al.Limited-budget output consen-sus for descriptor multiagent systems with energy constraints.IEEE Transactions on Cybernetics,2020,50(11):4585–4598.[10]OLFATI-SABER R,ALEX F,MURRAY R M.Consensus and coop-eration in networked multi-agent systems.Proceedings of the IEEE, 2007,95(1):215–233.[11]CHRISTOFIDES P D.Nonlinear and robust control of PDE systems:Methods and applications to transport-reaction processes.Applied Mechanics Reviews,2002,55(2):29–30.[12]WANG J,KRSTIC M.Delay-compensated control of sandwichedode-pde-ode hyperbolic systems for oil drilling and disaster relief.Automatica,2020,120:109131.[13]JIN F F,GUO B Z.Performance boundary output tracking for one-dimensional heat equation with boundary unmatched disturbance.Automatica,2018,96:1–10.[14]ALAMT T M,PAQUET L.The coupled heat maxwell equations withtemperature-dependent permittivity.Journal of Mathematical Analy-sis and Applications,2022,505(1):125472.1356控制理论与应用第40卷[15]AY ADI H.Exponential stabilization of cascade ode-linearized KDVsystem by boundary dirichlet actuation.European Journal of Control, 2018,43:33–38.[16]XU Zenghe,ZHAI Yuchun,JI Zhiling.An analytical solution for cou-pled convection-diffusion and chemical reaction infixed-beds.The Chinese Journal of Nonferrous Metals,2004,14(11):1918–1925.(徐曾和,翟玉春,纪智玲.固定床中对流扩散与反应耦合问题的一个解析解.中国有色金属学报,2004,14(11):1918–1925.)[17]DIMAROGONAS D V,FRAZZOLI E,JOHANSSON K H.Dis-tributed event-triggered control for multi-agent systems.IEEE Trans-actions on Automatic Control,2012,57(5):1291–1297.[18]LIU T F,JIANG Z P.Distributed control of multi-agent systems withpulse-width-modulated controllers.Automatica,2020,119:109020.[19]LU Renwei.Consistency of nonlinear second-order multiagent withdirected topology and delay.Yangzhou:Yangzhou University,2012.(鲁仁伟.具有有向拓扑和时滞的非线性二阶多智能体的一致性.扬州:扬州大学,2012.)[20]SI Qin,LUO Cheng.Global attractors of operator semigroups ontopological space.Acta Analysis Functionalis Applicata,2017,19(4): 412–418.(斯琴,罗成.拓扑空间上算子半群的全局吸引子.应用泛函分析学报,2017,19(4):412–418.)[21]LIU Rui,ZHAO Huaxin,MA Qiangqiang.Generalized-semigroupsand dissipative operator.Journal of Shenyang Normal University (Natural Science Edition),2011,29(3):362–364.(刘瑞,赵华新,马强强.广义C0半群与耗散算子.沈阳师范大学学报(自然科学版),2011,29(3):362–364.)作者简介:杨辉硕士研究生,目前研究方向为分布参数控制系统理论与应用,E-mail:1104660379@;宗西举博士,教授,英国奥斯特大学兼职博士生导师,目前研究方向为分布参数控制系统理论、复杂系统控制理论、控制理论在电力系统中的应用,E-mail:cse**************.cn;郑泽阳硕士研究生,目前研究方向为分布参数控制系统理论与应用,E-mail:*****************;徐秀妮讲师,目前研究方向为分布参数控制系统理论与应用, E-mail:***************.。
DOI: 10.1126/science.1094786, 441 (2004);304Science et al.Mitchell S. Abrahamsen,Cryptosporidium parvum Complete Genome Sequence of the Apicomplexan, (this information is current as of October 7, 2009 ):The following resources related to this article are available online at/cgi/content/full/304/5669/441version of this article at:including high-resolution figures, can be found in the online Updated information and services,/cgi/content/full/1094786/DC1 can be found at:Supporting Online Material/cgi/content/full/304/5669/441#otherarticles , 9 of which can be accessed for free: cites 25 articles This article 239 article(s) on the ISI Web of Science. cited by This article has been /cgi/content/full/304/5669/441#otherarticles 53 articles hosted by HighWire Press; see: cited by This article has been/cgi/collection/genetics Genetics: subject collections This article appears in the following/about/permissions.dtl in whole or in part can be found at: this article permission to reproduce of this article or about obtaining reprints Information about obtaining registered trademark of AAAS.is a Science 2004 by the American Association for the Advancement of Science; all rights reserved. The title Copyright American Association for the Advancement of Science, 1200 New York Avenue NW, Washington, DC 20005. (print ISSN 0036-8075; online ISSN 1095-9203) is published weekly, except the last week in December, by the Science o n O c t o b e r 7, 2009w w w .s c i e n c e m a g .o r g D o w n l o a d e d f r o m3.R.Jackendoff,Foundations of Language:Brain,Gram-mar,Evolution(Oxford Univ.Press,Oxford,2003).4.Although for Frege(1),reference was established rela-tive to objects in the world,here we follow Jackendoff’s suggestion(3)that this is done relative to objects and the state of affairs as mentally represented.5.S.Zola-Morgan,L.R.Squire,in The Development andNeural Bases of Higher Cognitive Functions(New York Academy of Sciences,New York,1990),pp.434–456.6.N.Chomsky,Reflections on Language(Pantheon,New York,1975).7.J.Katz,Semantic Theory(Harper&Row,New York,1972).8.D.Sperber,D.Wilson,Relevance(Harvard Univ.Press,Cambridge,MA,1986).9.K.I.Forster,in Sentence Processing,W.E.Cooper,C.T.Walker,Eds.(Erlbaum,Hillsdale,NJ,1989),pp.27–85.10.H.H.Clark,Using Language(Cambridge Univ.Press,Cambridge,1996).11.Often word meanings can only be fully determined byinvokingworld knowledg e.For instance,the meaningof “flat”in a“flat road”implies the absence of holes.However,in the expression“aflat tire,”it indicates the presence of a hole.The meaningof“finish”in the phrase “Billfinished the book”implies that Bill completed readingthe book.However,the phrase“the g oatfin-ished the book”can only be interpreted as the goat eatingor destroyingthe book.The examples illustrate that word meaningis often underdetermined and nec-essarily intertwined with general world knowledge.In such cases,it is hard to see how the integration of lexical meaning and general world knowledge could be strictly separated(3,31).12.W.Marslen-Wilson,C.M.Brown,L.K.Tyler,Lang.Cognit.Process.3,1(1988).13.ERPs for30subjects were averaged time-locked to theonset of the critical words,with40items per condition.Sentences were presented word by word on the centerof a computer screen,with a stimulus onset asynchronyof600ms.While subjects were readingthe sentences,their EEG was recorded and amplified with a high-cut-off frequency of70Hz,a time constant of8s,and asamplingfrequency of200Hz.14.Materials and methods are available as supportingmaterial on Science Online.15.M.Kutas,S.A.Hillyard,Science207,203(1980).16.C.Brown,P.Hagoort,J.Cognit.Neurosci.5,34(1993).17.C.M.Brown,P.Hagoort,in Architectures and Mech-anisms for Language Processing,M.W.Crocker,M.Pickering,C.Clifton Jr.,Eds.(Cambridge Univ.Press,Cambridge,1999),pp.213–237.18.F.Varela et al.,Nature Rev.Neurosci.2,229(2001).19.We obtained TFRs of the single-trial EEG data by con-volvingcomplex Morlet wavelets with the EEG data andcomputingthe squared norm for the result of theconvolution.We used wavelets with a7-cycle width,with frequencies ranging from1to70Hz,in1-Hz steps.Power values thus obtained were expressed as a per-centage change relative to the power in a baselineinterval,which was taken from150to0ms before theonset of the critical word.This was done in order tonormalize for individual differences in EEG power anddifferences in baseline power between different fre-quency bands.Two relevant time-frequency compo-nents were identified:(i)a theta component,rangingfrom4to7Hz and from300to800ms after wordonset,and(ii)a gamma component,ranging from35to45Hz and from400to600ms after word onset.20.C.Tallon-Baudry,O.Bertrand,Trends Cognit.Sci.3,151(1999).tner et al.,Nature397,434(1999).22.M.Bastiaansen,P.Hagoort,Cortex39(2003).23.O.Jensen,C.D.Tesche,Eur.J.Neurosci.15,1395(2002).24.Whole brain T2*-weighted echo planar imaging bloodoxygen level–dependent(EPI-BOLD)fMRI data wereacquired with a Siemens Sonata1.5-T magnetic reso-nance scanner with interleaved slice ordering,a volumerepetition time of2.48s,an echo time of40ms,a90°flip angle,31horizontal slices,a64ϫ64slice matrix,and isotropic voxel size of3.5ϫ3.5ϫ3.5mm.For thestructural magnetic resonance image,we used a high-resolution(isotropic voxels of1mm3)T1-weightedmagnetization-prepared rapid gradient-echo pulse se-quence.The fMRI data were preprocessed and analyzedby statistical parametric mappingwith SPM99software(http://www.fi/spm99).25.S.E.Petersen et al.,Nature331,585(1988).26.B.T.Gold,R.L.Buckner,Neuron35,803(2002).27.E.Halgren et al.,J.Psychophysiol.88,1(1994).28.E.Halgren et al.,Neuroimage17,1101(2002).29.M.K.Tanenhaus et al.,Science268,1632(1995).30.J.J.A.van Berkum et al.,J.Cognit.Neurosci.11,657(1999).31.P.A.M.Seuren,Discourse Semantics(Basil Blackwell,Oxford,1985).32.We thank P.Indefrey,P.Fries,P.A.M.Seuren,and M.van Turennout for helpful discussions.Supported bythe Netherlands Organization for Scientific Research,grant no.400-56-384(P.H.).Supporting Online Material/cgi/content/full/1095455/DC1Materials and MethodsFig.S1References and Notes8January2004;accepted9March2004Published online18March2004;10.1126/science.1095455Include this information when citingthis paper.Complete Genome Sequence ofthe Apicomplexan,Cryptosporidium parvumMitchell S.Abrahamsen,1,2*†Thomas J.Templeton,3†Shinichiro Enomoto,1Juan E.Abrahante,1Guan Zhu,4 Cheryl ncto,1Mingqi Deng,1Chang Liu,1‡Giovanni Widmer,5Saul Tzipori,5GregoryA.Buck,6Ping Xu,6 Alan T.Bankier,7Paul H.Dear,7Bernard A.Konfortov,7 Helen F.Spriggs,7Lakshminarayan Iyer,8Vivek Anantharaman,8L.Aravind,8Vivek Kapur2,9The apicomplexan Cryptosporidium parvum is an intestinal parasite that affects healthy humans and animals,and causes an unrelenting infection in immuno-compromised individuals such as AIDS patients.We report the complete ge-nome sequence of C.parvum,type II isolate.Genome analysis identifies ex-tremely streamlined metabolic pathways and a reliance on the host for nu-trients.In contrast to Plasmodium and Toxoplasma,the parasite lacks an api-coplast and its genome,and possesses a degenerate mitochondrion that has lost its genome.Several novel classes of cell-surface and secreted proteins with a potential role in host interactions and pathogenesis were also detected.Elu-cidation of the core metabolism,including enzymes with high similarities to bacterial and plant counterparts,opens new avenues for drug development.Cryptosporidium parvum is a globally impor-tant intracellular pathogen of humans and animals.The duration of infection and patho-genesis of cryptosporidiosis depends on host immune status,ranging from a severe but self-limiting diarrhea in immunocompetent individuals to a life-threatening,prolonged infection in immunocompromised patients.Asubstantial degree of morbidity and mortalityis associated with infections in AIDS pa-tients.Despite intensive efforts over the past20years,there is currently no effective ther-apy for treating or preventing C.parvuminfection in humans.Cryptosporidium belongs to the phylumApicomplexa,whose members share a com-mon apical secretory apparatus mediating lo-comotion and tissue or cellular invasion.Many apicomplexans are of medical or vet-erinary importance,including Plasmodium,Babesia,Toxoplasma,Neosprora,Sarcocys-tis,Cyclospora,and Eimeria.The life cycle ofC.parvum is similar to that of other cyst-forming apicomplexans(e.g.,Eimeria and Tox-oplasma),resulting in the formation of oocysts1Department of Veterinary and Biomedical Science,College of Veterinary Medicine,2Biomedical Genom-ics Center,University of Minnesota,St.Paul,MN55108,USA.3Department of Microbiology and Immu-nology,Weill Medical College and Program in Immu-nology,Weill Graduate School of Medical Sciences ofCornell University,New York,NY10021,USA.4De-partment of Veterinary Pathobiology,College of Vet-erinary Medicine,Texas A&M University,College Sta-tion,TX77843,USA.5Division of Infectious Diseases,Tufts University School of Veterinary Medicine,NorthGrafton,MA01536,USA.6Center for the Study ofBiological Complexity and Department of Microbiol-ogy and Immunology,Virginia Commonwealth Uni-versity,Richmond,VA23198,USA.7MRC Laboratoryof Molecular Biology,Hills Road,Cambridge CB22QH,UK.8National Center for Biotechnology Infor-mation,National Library of Medicine,National Insti-tutes of Health,Bethesda,MD20894,USA.9Depart-ment of Microbiology,University of Minnesota,Min-neapolis,MN55455,USA.*To whom correspondence should be addressed.E-mail:abe@†These authors contributed equally to this work.‡Present address:Bioinformatics Division,Genetic Re-search,GlaxoSmithKline Pharmaceuticals,5MooreDrive,Research Triangle Park,NC27009,USA.R E P O R T S SCIENCE VOL30416APRIL2004441o n O c t o b e r 7 , 2 0 0 9 w w w . s c i e n c e m a g . o r g D o w n l o a d e d f r o mthat are shed in the feces of infected hosts.C.parvum oocysts are highly resistant to environ-mental stresses,including chlorine treatment of community water supplies;hence,the parasite is an important water-and food-borne pathogen (1).The obligate intracellular nature of the par-asite ’s life cycle and the inability to culture the parasite continuously in vitro greatly impair researchers ’ability to obtain purified samples of the different developmental stages.The par-asite cannot be genetically manipulated,and transformation methodologies are currently un-available.To begin to address these limitations,we have obtained the complete C.parvum ge-nome sequence and its predicted protein com-plement.(This whole-genome shotgun project has been deposited at DDBJ/EMBL/GenBank under the project accession AAEE00000000.The version described in this paper is the first version,AAEE01000000.)The random shotgun approach was used to obtain the complete DNA sequence (2)of the Iowa “type II ”isolate of C.parvum .This isolate readily transmits disease among numerous mammals,including humans.The resulting ge-nome sequence has roughly 13ϫgenome cov-erage containing five gaps and 9.1Mb of totalDNA sequence within eight chromosomes.The C.parvum genome is thus quite compact rela-tive to the 23-Mb,14-chromosome genome of Plasmodium falciparum (3);this size difference is predominantly the result of shorter intergenic regions,fewer introns,and a smaller number of genes (Table 1).Comparison of the assembled sequence of chromosome VI to that of the recently published sequence of chromosome VI (4)revealed that our assembly contains an ad-ditional 160kb of sequence and a single gap versus two,with the common sequences dis-playing a 99.993%sequence identity (2).The relative paucity of introns greatly simplified gene predictions and facilitated an-notation (2)of predicted open reading frames (ORFs).These analyses provided an estimate of 3807protein-encoding genes for the C.parvum genome,far fewer than the estimated 5300genes predicted for the Plasmodium genome (3).This difference is primarily due to the absence of an apicoplast and mitochondrial genome,as well as the pres-ence of fewer genes encoding metabolic functions and variant surface proteins,such as the P.falciparum var and rifin molecules (Table 2).An analysis of the encoded pro-tein sequences with the program SEG (5)shows that these protein-encoding genes are not enriched in low-complexity se-quences (34%)to the extent observed in the proteins from Plasmodium (70%).Our sequence analysis indicates that Cryptosporidium ,unlike Plasmodium and Toxoplasma ,lacks both mitochondrion and apicoplast genomes.The overall complete-ness of the genome sequence,together with the fact that similar DNA extraction proce-dures used to isolate total genomic DNA from C.parvum efficiently yielded mito-chondrion and apicoplast genomes from Ei-meria sp.and Toxoplasma (6,7),indicates that the absence of organellar genomes was unlikely to have been the result of method-ological error.These conclusions are con-sistent with the absence of nuclear genes for the DNA replication and translation machinery characteristic of mitochondria and apicoplasts,and with the lack of mito-chondrial or apicoplast targeting signals for tRNA synthetases.A number of putative mitochondrial pro-teins were identified,including components of a mitochondrial protein import apparatus,chaperones,uncoupling proteins,and solute translocators (table S1).However,the ge-nome does not encode any Krebs cycle en-zymes,nor the components constituting the mitochondrial complexes I to IV;this finding indicates that the parasite does not rely on complete oxidation and respiratory chains for synthesizing adenosine triphosphate (ATP).Similar to Plasmodium ,no orthologs for the ␥,␦,or εsubunits or the c subunit of the F 0proton channel were detected (whereas all subunits were found for a V-type ATPase).Cryptosporidium ,like Eimeria (8)and Plas-modium ,possesses a pyridine nucleotide tran-shydrogenase integral membrane protein that may couple reduced nicotinamide adenine dinucleotide (NADH)and reduced nico-tinamide adenine dinucleotide phosphate (NADPH)redox to proton translocation across the inner mitochondrial membrane.Unlike Plasmodium ,the parasite has two copies of the pyridine nucleotide transhydrogenase gene.Also present is a likely mitochondrial membrane –associated,cyanide-resistant alter-native oxidase (AOX )that catalyzes the reduction of molecular oxygen by ubiquinol to produce H 2O,but not superoxide or H 2O 2.Several genes were identified as involved in biogenesis of iron-sulfur [Fe-S]complexes with potential mitochondrial targeting signals (e.g.,nifS,nifU,frataxin,and ferredoxin),supporting the presence of a limited electron flux in the mitochondrial remnant (table S2).Our sequence analysis confirms the absence of a plastid genome (7)and,additionally,the loss of plastid-associated metabolic pathways including the type II fatty acid synthases (FASs)and isoprenoid synthetic enzymes thatTable 1.General features of the C.parvum genome and comparison with other single-celled eukaryotes.Values are derived from respective genome project summaries (3,26–28).ND,not determined.FeatureC.parvum P.falciparum S.pombe S.cerevisiae E.cuniculiSize (Mbp)9.122.912.512.5 2.5(G ϩC)content (%)3019.43638.347No.of genes 38075268492957701997Mean gene length (bp)excluding introns 1795228314261424ND Gene density (bp per gene)23824338252820881256Percent coding75.352.657.570.590Genes with introns (%)553.9435ND Intergenic regions (G ϩC)content %23.913.632.435.145Mean length (bp)5661694952515129RNAsNo.of tRNA genes 454317429944No.of 5S rRNA genes 6330100–2003No.of 5.8S ,18S ,and 28S rRNA units 57200–400100–20022Table parison between predicted C.parvum and P.falciparum proteins.FeatureC.parvum P.falciparum *Common †Total predicted proteins380752681883Mitochondrial targeted/encoded 17(0.45%)246(4.7%)15Apicoplast targeted/encoded 0581(11.0%)0var/rif/stevor ‡0236(4.5%)0Annotated as protease §50(1.3%)31(0.59%)27Annotated as transporter 69(1.8%)34(0.65%)34Assigned EC function ¶167(4.4%)389(7.4%)113Hypothetical proteins925(24.3%)3208(60.9%)126*Values indicated for P.falciparum are as reported (3)with the exception of those for proteins annotated as protease or transporter.†TBLASTN hits (e Ͻ–5)between C.parvum and P.falciparum .‡As reported in (3).§Pre-dicted proteins annotated as “protease or peptidase”for C.parvum (CryptoGenome database,)and P.falciparum (PlasmoDB database,).Predicted proteins annotated as “trans-porter,permease of P-type ATPase”for C.parvum (CryptoGenome)and P.falciparum (PlasmoDB).¶Bidirectional BLAST hit (e Ͻ–15)to orthologs with assigned Enzyme Commission (EC)numbers.Does not include EC assignment numbers for protein kinases or protein phosphatases (due to inconsistent annotation across genomes),or DNA polymerases or RNA polymerases,as a result of issues related to subunit inclusion.(For consistency,46proteins were excluded from the reported P.falciparum values.)R E P O R T S16APRIL 2004VOL 304SCIENCE 442 o n O c t o b e r 7, 2009w w w .s c i e n c e m a g .o r g D o w n l o a d e d f r o mare otherwise localized to the plastid in other apicomplexans.C.parvum fatty acid biosynthe-sis appears to be cytoplasmic,conducted by a large(8252amino acids)modular type I FAS (9)and possibly by another large enzyme that is related to the multidomain bacterial polyketide synthase(10).Comprehensive screening of the C.parvum genome sequence also did not detect orthologs of Plasmodium nuclear-encoded genes that contain apicoplast-targeting and transit sequences(11).C.parvum metabolism is greatly stream-lined relative to that of Plasmodium,and in certain ways it is reminiscent of that of another obligate eukaryotic parasite,the microsporidian Encephalitozoon.The degeneration of the mi-tochondrion and associated metabolic capabili-ties suggests that the parasite largely relies on glycolysis for energy production.The parasite is capable of uptake and catabolism of mono-sugars(e.g.,glucose and fructose)as well as synthesis,storage,and catabolism of polysac-charides such as trehalose and amylopectin. Like many anaerobic organisms,it economizes ATP through the use of pyrophosphate-dependent phosphofructokinases.The conver-sion of pyruvate to acetyl–coenzyme A(CoA) is catalyzed by an atypical pyruvate-NADPH oxidoreductase(Cp PNO)that contains an N-terminal pyruvate–ferredoxin oxidoreductase (PFO)domain fused with a C-terminal NADPH–cytochrome P450reductase domain (CPR).Such a PFO-CPR fusion has previously been observed only in the euglenozoan protist Euglena gracilis(12).Acetyl-CoA can be con-verted to malonyl-CoA,an important precursor for fatty acid and polyketide biosynthesis.Gly-colysis leads to several possible organic end products,including lactate,acetate,and ethanol. The production of acetate from acetyl-CoA may be economically beneficial to the parasite via coupling with ATP production.Ethanol is potentially produced via two in-dependent pathways:(i)from the combination of pyruvate decarboxylase and alcohol dehy-drogenase,or(ii)from acetyl-CoA by means of a bifunctional dehydrogenase(adhE)with ac-etaldehyde and alcohol dehydrogenase activi-ties;adhE first converts acetyl-CoA to acetal-dehyde and then reduces the latter to ethanol. AdhE predominantly occurs in bacteria but has recently been identified in several protozoans, including vertebrate gut parasites such as Enta-moeba and Giardia(13,14).Adjacent to the adhE gene resides a second gene encoding only the AdhE C-terminal Fe-dependent alcohol de-hydrogenase domain.This gene product may form a multisubunit complex with AdhE,or it may function as an alternative alcohol dehydro-genase that is specific to certain growth condi-tions.C.parvum has a glycerol3-phosphate dehydrogenase similar to those of plants,fungi, and the kinetoplastid Trypanosoma,but(unlike trypanosomes)the parasite lacks an ortholog of glycerol kinase and thus this pathway does not yield glycerol production.In addition to themodular fatty acid synthase(Cp FAS1)andpolyketide synthase homolog(Cp PKS1), C.parvum possesses several fatty acyl–CoA syn-thases and a fatty acyl elongase that may partici-pate in fatty acid metabolism.Further,enzymesfor the metabolism of complex lipids(e.g.,glyc-erolipid and inositol phosphate)were identified inthe genome.Fatty acids are apparently not anenergy source,because enzymes of the fatty acidoxidative pathway are absent,with the exceptionof a3-hydroxyacyl-CoA dehydrogenase.C.parvum purine metabolism is greatlysimplified,retaining only an adenosine ki-nase and enzymes catalyzing conversionsof adenosine5Ј-monophosphate(AMP)toinosine,xanthosine,and guanosine5Ј-monophosphates(IMP,XMP,and GMP).Among these enzymes,IMP dehydrogenase(IMPDH)is phylogenetically related toε-proteobacterial IMPDH and is strikinglydifferent from its counterparts in both thehost and other apicomplexans(15).In con-trast to other apicomplexans such as Toxo-plasma gondii and P.falciparum,no geneencoding hypoxanthine-xanthineguaninephosphoribosyltransferase(HXGPRT)is de-tected,in contrast to a previous report on theactivity of this enzyme in C.parvum sporo-zoites(16).The absence of HXGPRT sug-gests that the parasite may rely solely on asingle enzyme system including IMPDH toproduce GMP from AMP.In contrast to otherapicomplexans,the parasite appears to relyon adenosine for purine salvage,a modelsupported by the identification of an adeno-sine transporter.Unlike other apicomplexansand many parasitic protists that can synthe-size pyrimidines de novo,C.parvum relies onpyrimidine salvage and retains the ability forinterconversions among uridine and cytidine5Ј-monophosphates(UMP and CMP),theirdeoxy forms(dUMP and dCMP),and dAMP,as well as their corresponding di-and triphos-phonucleotides.The parasite has also largelyshed the ability to synthesize amino acids denovo,although it retains the ability to convertselect amino acids,and instead appears torely on amino acid uptake from the host bymeans of a set of at least11amino acidtransporters(table S2).Most of the Cryptosporidium core pro-cesses involved in DNA replication,repair,transcription,and translation conform to thebasic eukaryotic blueprint(2).The transcrip-tional apparatus resembles Plasmodium interms of basal transcription machinery.How-ever,a striking numerical difference is seenin the complements of two RNA bindingdomains,Sm and RRM,between P.falcipa-rum(17and71domains,respectively)and C.parvum(9and51domains).This reductionresults in part from the loss of conservedproteins belonging to the spliceosomal ma-chinery,including all genes encoding Smdomain proteins belonging to the U6spliceo-somal particle,which suggests that this par-ticle activity is degenerate or entirely lost.This reduction in spliceosomal machinery isconsistent with the reduced number of pre-dicted introns in Cryptosporidium(5%)rela-tive to Plasmodium(Ͼ50%).In addition,keycomponents of the small RNA–mediatedposttranscriptional gene silencing system aremissing,such as the RNA-dependent RNApolymerase,Argonaute,and Dicer orthologs;hence,RNA interference–related technolo-gies are unlikely to be of much value intargeted disruption of genes in C.parvum.Cryptosporidium invasion of columnarbrush border epithelial cells has been de-scribed as“intracellular,but extracytoplas-mic,”as the parasite resides on the surface ofthe intestinal epithelium but lies underneaththe host cell membrane.This niche may al-low the parasite to evade immune surveil-lance but take advantage of solute transportacross the host microvillus membrane or theextensively convoluted parasitophorous vac-uole.Indeed,Cryptosporidium has numerousgenes(table S2)encoding families of putativesugar transporters(up to9genes)and aminoacid transporters(11genes).This is in starkcontrast to Plasmodium,which has fewersugar transporters and only one putative ami-no acid transporter(GenBank identificationnumber23612372).As a first step toward identification ofmulti–drug-resistant pumps,the genome se-quence was analyzed for all occurrences ofgenes encoding multitransmembrane proteins.Notable are a set of four paralogous proteinsthat belong to the sbmA family(table S2)thatare involved in the transport of peptide antibi-otics in bacteria.A putative ortholog of thePlasmodium chloroquine resistance–linkedgene Pf CRT(17)was also identified,althoughthe parasite does not possess a food vacuole likethe one seen in Plasmodium.Unlike Plasmodium,C.parvum does notpossess extensive subtelomeric clusters of anti-genically variant proteins(exemplified by thelarge families of var and rif/stevor genes)thatare involved in immune evasion.In contrast,more than20genes were identified that encodemucin-like proteins(18,19)having hallmarksof extensive Thr or Ser stretches suggestive ofglycosylation and signal peptide sequences sug-gesting secretion(table S2).One notable exam-ple is an11,700–amino acid protein with anuninterrupted stretch of308Thr residues(cgd3_720).Although large families of secretedproteins analogous to the Plasmodium multi-gene families were not found,several smallermultigene clusters were observed that encodepredicted secreted proteins,with no detectablesimilarity to proteins from other organisms(Fig.1,A and B).Within this group,at leastfour distinct families appear to have emergedthrough gene expansions specific to the Cryp-R E P O R T S SCIENCE VOL30416APRIL2004443o n O c t o b e r 7 , 2 0 0 9 w w w . s c i e n c e m a g . o r g D o w n l o a d e d f r o mtosporidium clade.These families —SKSR,MEDLE,WYLE,FGLN,and GGC —were named after well-conserved sequence motifs (table S2).Reverse transcription polymerase chain reaction (RT-PCR)expression analysis (20)of one cluster,a locus of seven adjacent CpLSP genes (Fig.1B),shows coexpression during the course of in vitro development (Fig.1C).An additional eight genes were identified that encode proteins having a periodic cysteine structure similar to the Cryptosporidium oocyst wall protein;these eight genes are similarly expressed during the onset of oocyst formation and likely participate in the formation of the coccidian rigid oocyst wall in both Cryptospo-ridium and Toxoplasma (21).Whereas the extracellular proteins described above are of apparent apicomplexan or lineage-specific in-vention,Cryptosporidium possesses many genesencodingsecretedproteinshavinglineage-specific multidomain architectures composed of animal-and bacterial-like extracellular adhe-sive domains (fig.S1).Lineage-specific expansions were ob-served for several proteases (table S2),in-cluding an aspartyl protease (six genes),a subtilisin-like protease,a cryptopain-like cys-teine protease (five genes),and a Plas-modium falcilysin-like (insulin degrading enzyme –like)protease (19genes).Nine of the Cryptosporidium falcilysin genes lack the Zn-chelating “HXXEH ”active site motif and are likely to be catalytically inactive copies that may have been reused for specific protein-protein interactions on the cell sur-face.In contrast to the Plasmodium falcilysin,the Cryptosporidium genes possess signal peptide sequences and are likely trafficked to a secretory pathway.The expansion of this family suggests either that the proteins have distinct cleavage specificities or that their diversity may be related to evasion of a host immune response.Completion of the C.parvum genome se-quence has highlighted the lack of conven-tional drug targets currently pursued for the control and treatment of other parasitic protists.On the basis of molecular and bio-chemical studies and drug screening of other apicomplexans,several putative Cryptospo-ridium metabolic pathways or enzymes have been erroneously proposed to be potential drug targets (22),including the apicoplast and its associated metabolic pathways,the shikimate pathway,the mannitol cycle,the electron transport chain,and HXGPRT.Nonetheless,complete genome sequence analysis identifies a number of classic and novel molecular candidates for drug explora-tion,including numerous plant-like and bacterial-like enzymes (tables S3and S4).Although the C.parvum genome lacks HXGPRT,a potent drug target in other api-complexans,it has only the single pathway dependent on IMPDH to convert AMP to GMP.The bacterial-type IMPDH may be a promising target because it differs substan-tially from that of eukaryotic enzymes (15).Because of the lack of de novo biosynthetic capacity for purines,pyrimidines,and amino acids,C.parvum relies solely on scavenge from the host via a series of transporters,which may be exploited for chemotherapy.C.parvum possesses a bacterial-type thymidine kinase,and the role of this enzyme in pyrim-idine metabolism and its drug target candida-cy should be pursued.The presence of an alternative oxidase,likely targeted to the remnant mitochondrion,gives promise to the study of salicylhydroxamic acid (SHAM),as-cofuranone,and their analogs as inhibitors of energy metabolism in the parasite (23).Cryptosporidium possesses at least 15“plant-like ”enzymes that are either absent in or highly divergent from those typically found in mammals (table S3).Within the glycolytic pathway,the plant-like PPi-PFK has been shown to be a potential target in other parasites including T.gondii ,and PEPCL and PGI ap-pear to be plant-type enzymes in C.parvum .Another example is a trehalose-6-phosphate synthase/phosphatase catalyzing trehalose bio-synthesis from glucose-6-phosphate and uridine diphosphate –glucose.Trehalose may serve as a sugar storage source or may function as an antidesiccant,antioxidant,or protein stability agent in oocysts,playing a role similar to that of mannitol in Eimeria oocysts (24).Orthologs of putative Eimeria mannitol synthesis enzymes were not found.However,two oxidoreductases (table S2)were identified in C.parvum ,one of which belongs to the same families as the plant mannose dehydrogenases (25)and the other to the plant cinnamyl alcohol dehydrogenases.In principle,these enzymes could synthesize protective polyol compounds,and the former enzyme could use host-derived mannose to syn-thesize mannitol.References and Notes1.D.G.Korich et al .,Appl.Environ.Microbiol.56,1423(1990).2.See supportingdata on Science Online.3.M.J.Gardner et al .,Nature 419,498(2002).4.A.T.Bankier et al .,Genome Res.13,1787(2003).5.J.C.Wootton,Comput.Chem.18,269(1994).Fig.1.(A )Schematic showing the chromosomal locations of clusters of potentially secreted proteins.Numbers of adjacent genes are indicated in paren-theses.Arrows indicate direc-tion of clusters containinguni-directional genes (encoded on the same strand);squares indi-cate clusters containingg enes encoded on both strands.Non-paralogous genes are indicated by solid gray squares or direc-tional triangles;SKSR (green triangles),FGLN (red trian-gles),and MEDLE (blue trian-gles)indicate three C.parvum –specific families of paralogous genes predominantly located at telomeres.Insl (yellow tri-angles)indicates an insulinase/falcilysin-like paralogous gene family.Cp LSP (white square)indicates the location of a clus-ter of adjacent large secreted proteins (table S2)that are cotranscriptionally regulated.Identified anchored telomeric repeat sequences are indicated by circles.(B )Schematic show-inga select locus containinga cluster of coexpressed large secreted proteins (Cp LSP).Genes and intergenic regions (regions between identified genes)are drawn to scale at the nucleotide level.The length of the intergenic re-gions is indicated above or be-low the locus.(C )Relative ex-pression levels of CpLSP (red lines)and,as a control,C.parvum Hedgehog-type HINT domain gene (blue line)duringin vitro development,as determined by semiquantitative RT-PCR usingg ene-specific primers correspondingto the seven adjacent g enes within the CpLSP locus as shown in (B).Expression levels from three independent time-course experiments are represented as the ratio of the expression of each gene to that of C.parvum 18S rRNA present in each of the infected samples (20).R E P O R T S16APRIL 2004VOL 304SCIENCE 444 o n O c t o b e r 7, 2009w w w .s c i e n c e m a g .o r g D o w n l o a d e d f r o m。
第 63 卷第 2 期2024 年 3 月Vol.63 No.2Mar.2024中山大学学报(自然科学版)(中英文)ACTA SCIENTIARUM NATURALIUM UNIVERSITATIS SUNYATSENI基于Lyapunov-MPC方法的非合作目标近距离抵近控制*杜兴瑞,孟云鹤,陆璐中山大学人工智能学院,广东珠海 519082摘要:针对航天器近距离视线抵近同时存在轨道与姿态机动的非合作目标特定方位控制问题,提出了一种基于控制Lyapunov函数(CLF)的模型预测控制方法(LMPC)。
首先,根据视线坐标系下的轨道动力学方程,建立了满足视线指向要求的航天器相对轨道动力学模型,并推导了期望轨道的解析表达式。
其次,利用MPC方法设计控制器进行在线优化控制,并通过纳入基于李雅普洛夫方法的非线性反步控制的显式特征,构建收缩约束式,以确保闭环稳定性。
接着,对基于LMPC的控制方法的递归可行性和闭环稳定性进行了证明。
最后,仿真结果证明了所设计的LMPC轨迹跟踪方法的有效性和鲁棒性。
关键词:非合作目标;近距离视线抵近;非线性动力学系统;控制Lyapunov函数;模型预测控制中图分类号:V19 文献标志码:A 文章编号:2097 - 0137(2024)02 - 0085 - 10Non-cooperative target proximity control based onLyapunov-MPC methodDU Xingrui, MENG Yunhe, LU LuSchool of Artificial Intelligence, Sun Yat-sen University, Zhuhai 519082, ChinaAbstract:A model predictive control method based on Lyapunov function (LMPC)is proposed to control the specific orientation of non-cooperative spacecraft with orbit and attitude maneuvers. Firstly,according to the orbital dynamics equation in the line-of-sight coordinate system,the relative orbital dynamics model of the spacecraft satisfying the requirements of line-of-sight direction is established,and the analytical expression of the expected orbit is derived. Secondly, the MPC method is used to de‐sign the controller for online optimization control, and the contraction constraint formula is constructedto ensure the closed-loop stability by incorporating the display features of the nonlinear backstepping control based on the Lyapunov method. Then,the recursive feasibility and closed-loop stability of LMPC based control method are proved. Finally, the simulation results prove the effectiveness and ro‐bustness of the proposed LMPC trajectory tracking method.Key words:non-cooperative target; close line of sight; nonlinear dynamic system; control Lyapunov function;model predictive controlDOI:10.13471/ki.acta.snus.2023B047*收稿日期:2023 − 07 − 09 录用日期:2023 − 08 − 02 网络首发日期:2023 − 09 − 26基金项目:国家自然科学基金(61673390)作者简介:杜兴瑞(1997年生),男;研究方向:智能控制;E-mail:****************通信作者:孟云鹤(1978年生),男;研究方向:智能控制;E-mail:*****************第 63 卷中山大学学报(自然科学版)(中英文)航天器的自主抵近控制是实现一系列空间近距离操作任务的关键技术,在空间态势感知、空间攻防、在轨服务等领域都有着广泛应用。
电气传动2023年第53卷第8期ELECTRIC DRIVE 2023Vol.53No.8摘要:在新型电力系统背景下,电网需求侧可调控资源对于系统稳定的重要性日益提升。
电动汽车作为重要的可调度负荷资源,对其可调度潜力进行准确评估,能有效提升电网安全稳定运行能力。
现有研究较少考虑电动汽车用户行为偏好对电网负荷调控的影响,因此,提出一种考虑用户充电偏好的电动汽车集中式电站可调潜力评估方法。
考虑电动汽车充电时的外部条件与自身行为偏好因素,建立基于隶属度函数的用户充电行为模型,并结合长短期记忆神经网络算法对充电站的可调潜力进行评估。
最后,通过实际充电站算例,分析了电动汽车用户与负荷可调度潜力之间的耦合关系,验证了所提方法对负荷可调控容量评估的有效性,为电动汽车可调负荷参与削峰填谷等需求响应服务提供了理论支撑。
关键词:电动汽车;调度潜力;用户行为;隶属度函数;长短期记忆神经网络中图分类号:TM715文献标识码:ADOI :10.19457/j.1001-2095.dqcd24400Evaluation of Adjustable Potential of Urban Electric Vehicle CentralizedCharging Load Based on MF -LSTMPAN Lingling 1,ZHUANG Weijin 1,ZHAO Qi 2,TIAN Jiang 2(1.China Electric Power Research Institute Co.,Ltd.,Nanjing 210000,Jiangsu ,China ;2.Suzhou Power Supply Branch ,State Grid Jiangsu Electric Power Co.,Ltd.,Suzhou 215000,Jiangsu ,China )Abstract:In the background of the new power system ,the importance of demand-side dispatchable resources of the grid for system stability is increasing.As an important dispatchable load resource ,an accurate assessment of electric vehicle (EV )dispatchable potential can effectively improve the safety and stability of the grid.Existing research has rarely considered the impact of EV user behavior preferences on grid load regulation.Therefore ,a method for evaluating the adjustable potential of EV centralized power stations considering user charging preferences was proposed.The user charging behavior model based on the membership function (MF )was established considering external conditions and their own behavioral preferences when charging EVs.And the long short-term memory (LSTM )neural network algorithm was combined with MF to evaluate the adjustable potential of charging stations.Finally ,the coupling relationship between EV users and load dispatchable potential was analyzed through actual charging station calculations ,which verifies the effectiveness of the proposed method for load dispatchable capacity assessment and provides theoretical support for EV adjustable load participation in demand response services such as peak shaving and valley filling.Key words:electric vehicle (EV );scheduling potential ;user behavior ;membership function (MF );long short-term memory (LSTM )neural network基金项目:国家电网公司科技项目(5108-202118041A-0-0-00)作者简介:潘玲玲(1985—),女,硕士,高级工程师,Email :********************* 通讯作者:庄卫金(1978—),男,本科,高级工程师,Email :**********************基于MF⁃LSTM 的城市电动汽车集中充电负荷可调潜力评估潘玲玲1,庄卫金1,赵奇2,田江2(1.中国电力科学研究院有限公司,江苏南京210000;2.国网江苏省电力有限公司苏州供电分公司,江苏苏州215000)随着新能源在新型电力系统中的比例持续提升[1],新能源机组具有的波动性大、随机性强的特性,使其成为重要的可调度资源[2]。
第51卷第10期电力系统保护与控制Vol.51 No.10 2023年5月16日Power System Protection and Control May 16, 2023 DOI: 10.19783/ki.pspc.221314考虑谐波耦合的多变流器并网系统建模及交直流谐波交互特性分析林顺富1,李 寅1,戴烨敏2,杨 帆1,边晓燕1,李东东1(1.上海电力大学电气工程学院,上海 200090;2.国网上海市电力公司青浦供电公司,上海 201799)摘要:新型电力系统中高比例可再生能源和高比例电力电子设备接入的特征带来异于传统电网下的谐波交互问题,多变流器拓扑的谐波耦合交互特性亟待研究。
首先,基于谐波状态空间(harmonic state space, HSS)对多变流器并网系统(multiple grid-connected-converter system, MGCCS)建立考虑谐波耦合的谐波传递函数矩阵模型,综合考虑了系统各控制环节对状态变量的影响以及变流器的级联、并联。
其次,基于所建HSS模型明确定义谐波耦合系数,并用于揭示多变流器拓扑的谐波耦合机理,分析级联、并联变流器谐波交互特性。
然后,应用谐波耦合系数量化分析MGCCS中滤波电感、电流环、锁相环等关键参数对系统谐波交互的影响。
最后,将HSS模型和Matlab/Simulink 模型、RT-LAB模型的结果进行对比,验证了所建HSS模型的精确性,以及谐波耦合系数理论应用于系统交直流谐波交互分析的有效性。
关键词:多变流器并网系统;交直流谐波交互;谐波状态空间;谐波耦合系数;并网电流Modeling of a multiple grid-connected-converter system considering harmonic coupling andanalysis of AC/DC harmonic interaction characteristicsLIN Shunfu1, LI Yin1, DAI Yemin2, YANG Fan1, BIAN Xiaoyan1, LI Dongdong1(1. College of Electrical Engineering, Shanghai University of Electric Power, Shanghai 200090, China; 2. Qingpu PowerSupply Company of State Grid Shanghai Municipal Electric Power Company, Shanghai 201799, China) Abstract: The characteristics of high penetration of renewable energy and high proportion of power electronic equipment in new power systems bring a harmonic interaction problem. This is different from traditional power systems. The harmonic coupling interaction characteristics of the multi-converter topology need to be studied. First, based on the harmonic state space (HSS), the harmonic transfer function matrix model considering harmonic coupling is established for the multiple grid-connected-converter system (MGCCS). The model comprehensively considers the influence of each control link of the system on the state variables as well as the factors of cascade and parallel converters. Second, the harmonic coupling coefficient is defined based on the established HSS model. This is used to reveal the harmonic coupling mechanism of the multi-converter topology, and analyze the harmonic interaction characteristics of the cascade and parallel converters. Then, the harmonic coupling coefficient is used to quantify the influence of key parameters such as filter inductor, current loop and phase-locked loop on the harmonic interaction of MGCCS. Finally, the results of the HSS model, Matlab/Simulink model and RT-LAB model are compared to verify the accuracy of the proposed HSS model and the effectiveness of the harmonic coupling coefficient theory applied to the AC/DC harmonic interaction analysis of the system.This work is supported by the National Natural Science Foundation of China (No. 51977127).Key words: multiple grid-connected-converter system; AC/DC harmonic interaction; harmonic state space;harmonic coupling coefficient; grid-connected current0 引言在“双碳”目标的背景下,以高渗透率的可再基金项目:国家自然科学基金项目资助(51977127);上海市科学技术委员会项目资助(19020500800);上海市教育发展基金会和上海市教育委员会“曙光计划”项目资助(20SG52) 生能源、高比例的电力电子设备、高速增长的新型负荷为主要特征的新型电力系统逐步形成[1-4]。
DOI: 10.16562/ki.0256-1492.2021071202新西兰Hikurangi 俯冲带沉积物成岩作用示踪研究:来自孔隙流体Sr 同位素证据孔丽茹,罗敏,陈多福上海深渊科学工程技术研究中心,上海海洋大学海洋科学学院,上海 201306摘要:俯冲带是地球上地质活动最活跃的地带之一,对地球表面和内部的演化具有重要意义。
俯冲带慢滑移事件作为一种重要的断层滑动方式在近十几年才逐渐被地球物理学家所认识。
浅源慢滑移可以使浅部断层发生破裂至海底,引发大规模海啸。
了解孔隙流体来源和俯冲带沉积物成岩作用有助于认识慢滑移事件的成因机制。
以国际大洋发现计划(IODP )375航次在新西兰Hikurangi 俯冲板块钻探站位(U1520)和变形前缘逆冲断层钻探站位(U1518)为研究对象,对两个站位沉积物孔隙流体的SO 42-、Ca 2+、Mg 2+和Sr 2+浓度以及放射性Sr 同位素(87Sr/86Sr )进行了分析。
结果显示两个站位Ca 2+与Mg 2+浓度、Sr 2+浓度与87Sr/86Sr 呈负相关关系是由于火山灰蚀变作用导致的。
两个站位浅层0~14.3和0~37.3 mbsf 沉积物孔隙水中的Ca 2+、Mg 2+浓度同时降低,表明发生了自生碳酸盐沉淀。
同时,俯冲板块U1520站位的岩性单元IV (509.82~848.45 mbsf )Mg 2+浓度随深度减小,Ca 2+、Sr 2+浓度则增加,但87Sr/86Sr 基本保持不变,显示了碳酸盐重结晶作用。
在其下部以火山碎屑岩为主的岩性单元V (848.45~1 016.24 mbsf )沉积物孔隙水的SO 42-、Ca 2+、Mg 2+浓度均趋近海水值,这可能是由于海水在渗透性较好的火山碎屑岩中发生横向流动导致。
因此,推测俯冲板片的岩性和成岩作用是高度的不均一,容易促使俯冲板片进入俯冲带后形成特殊的应力场和异常的流体压力,进而可能与Hikurangi 俯冲带频发的慢滑移事件有关。
红外云顶亮温在西北太平洋热带气旋强度预报中的应用Ξ陈佩燕1,2 端义宏1,2 余 晖1,2 胡春梅31中国气象局上海台风研究所,上海,2000302中国气象局台风预报技术重点开放实验室,上海,2000303重庆市气象台,重庆,401147摘 要 应用GMS25气象卫星红外云顶亮温(TBB)资料,分析西北太平洋的热带气旋(TC)TBB、TBB的对称和非对称分量与滞后0—48h TC强度的相关关系。
发现,TC眼墙附近东南侧的TBB、距TC中心半径0.8°—1.7°范围内TBB对称分量和1—10波振幅之和与0—48h的TC强度有很好的负相关关系,与滞后24h的TC强度相关极值分别达到-0.52,-0.59和-0.625。
考虑气候持续因子、天气因子及TBB因子,针对1996—2002年西北太平洋远海区域(0°—50°N,120°—155°E)热带风暴(TS)等级以上样本,建立12,24h和48h强度预报方程并进行独立样本检验。
结果表明,1.0°—1.5°环域平均的TBB对12h强度预报的方差贡献位居第4,TC东南侧TBB的平均值和1.1°—1.5°范围TBB极大与极小值之差对24h强度预报的方差贡献分列第3和第5位。
考虑TBB因子的回归方程对TS和强热带风暴(STS)的强度预报能力有较大提高,对12h内强度减弱15m/s以上TC的12h预报、强度稳定TC的24h预报和强度48h增强10m/s以上TC的48h预报均有所改善。
关键词:红外云顶亮温,非对称结构,热带气旋,强度预报。
1 引 言现阶段,对于热带气旋(TC)强度预报缺少有效的客观方法。
应用最早和最为广泛的是根据可见光和红外云图上TC云型和云系特征来估计及预报TC强度的Dvorak技术,在改进的客观Dvorak技术中[1],用TBB(T BB)资料确定TC中心的位置、眼和周边的温度,并估计TC参数指数。
Stabilityofsynchronouschaosandon-offintermittencyincoupledmaplatticesMingzhouDing*andWeimingYang†PrograminComplexSystemsandBrainSciences,CenterforComplexSystemsandDepartmentofMathematicalSciences,FloridaAtlanticUniversity,BocaRaton,Florida33431͑Received25April1997͒
InthispaperweconsiderthestabilityofsynchronouschaosinlatticesofcoupledN-dimensionalmaps.Forglobalcoupling,wederiveexplicitconditionsforcomputingtheparametervaluesatwhichthesynchronouschaoticattractorbecomesunstableandbifurcatesintoasynchronouschaos.Inparticular,weshowthatafterthebifurcationonegenerallyobserveson-offintermittency,aprocessinwhichtheentiresystemevolvesnearlysynchronously͑butchaotically͒forlongperiodsoftime,whichareinterruptedbybriefburstsawayfromsynchrony.Fornearest-neighborcoupledsystems,however,weshowthatthestabilityofthesynchronouschaoticstateisafunctionofthesystemsize.Inparticular,forlargesystems,wewillnotbeabletoobservesynchronouschaos.Wederiveaconditionrelatingthelocalmap’slargestLyapunovexponenttothemaximalsystemsizeunderwhichonecanstillobservesynchronouschaosandon-offintermittency.Otherissuesrelatedtothecharacterizationofon-offintermittentsignalsarealsodiscussed.͓S1063-651X͑97͒07210-3͔
PACSnumber͑s͒:05.40.ϩj,05.45.ϩb
I.INTRODUCTIONConsideracoupledmaplattice͓1͔.Assumethatthereisarangeofparametervaluesforwhichthissystemexhibitsauniqueattractorofsynchronouschaoswhereeveryelementevolveschaoticallyandisinsynchronywitheveryotherel-ement.Supposethat,astheparameterisvariedpastacertainbifurcationpoint,thissynchronouschaoslosesstability,andisreplacedbyanasynchronouschaoticstate.Itcanbeshownthat,underrathergeneralconditions,immediatelyafterthebifurcation,thedynamicsexhibitson-offintermittency͓3–7͔inwhichlongepisodesofnearlysynchronousevolution͑laminarphase͒areinterruptedbyacertainelementorele-mentsinthesystemburstingawayfromthesynchronousstate.Theburstsbecomemoreandmorefrequentasthepa-rameterismovedfurtherandfurtherawayfromthebifurca-tionpoint.Eventually,thesystemreachesfullydevelopedheterogeneouschaoswherenoclearlyidentifiableepisodesofsynchronouschaosareseen.Accordingtotheterminologyofarecentpaper͓2͔,thisbifurcationisaspatiotemporalexampleofanonhystereticblowoutbifurcation.Blowoutbi-furcationsoccurinsystemswithsymmetry,whichinourcaseisthespatialtranslationalinvarianceduetoidenticalelementsusedateachspacesite.Itisnonhystereticbecausetherearenootherattractorsinthephasespacecoexistingwiththesynchronouschaosattractor.Hystereticblowoutbi-furcationsoccuriftherearesimultaneouslymorethanoneattractorinthesystem.Inthiscaseonemayobserveriddledbasinsonthesideoftheparameteraxiswherethesynchro-nousstateisstillstable͓8͔.AssumethatthelocalmapisNdimensionalandischa-oticintheabsenceofcoupling.InSec.IIwecarryoutastabilityanalysisofsynchronouschaosforgloballycoupledsystemsofsuchmaps.Weshowthat,whenthesynchronouschaosbecomesunstable,thesystemexhibitson-offintermit-
tency.SectionIIIpresentsnumericalresultsonthecharac-terizationofon-offintermittentsignalsusingquantitieslikelaminarphasedistributionplotsandpowerspectra.InSec.VIweconsiderthestabilityofsynchronouschaosincoupledmaplatticeswherethecouplingisnearestneighbor.Wepointoutthat,insuchsystems,wecanonlyexpecttoseestablesynchronouschaosandtheaccompanyingon-offin-termittentbehaviorifthenumberofcoupledmapsissmall.SectionVconcludesthispaper.
II.STABILITYOFSYNCHRONOUSCHAOSINGLOBALLYCOUPLEDMAPSANDONSETOFON-OFFINTERMITTENCY
Coupledmaplattices,asdiscreteanalogstocoupledos-cillatorsandpartialdifferentialequations,haveinrecentyearsbecomethemodelofchoicefordevelopingintuitionsandconceptsinthestudyofspatiotemporaldynamicalsys-tems͓1,9͔.Assumingglobal͑meanfield͒couplingweex-pressourmodelas
xnϩ1͑i͒ϭ͑1Ϫ⑀͒f„xn͑i͒…ϩ⑀L͚jϭ1Lf„xn͑j͒…,͑1͒
wherexisanN-dimensionalcolumnvector,ndenotesthetimestep,i,jarelabelsoflatticesites,f͑x͒isanN-dimensionalnonlinearmappingfunction,⑀isthecoupling
strengthsatisfying0р⑀Ͻ1,andListhetotalnumberof
coupledelements.ThelocalN-dimensionalmap
xnϩ1ϭf͑xn͒͑2͒
isassumedtobechaotic.FromEqs.͑1͒and͑2͒onecanseethatxn(i)ϭxn(j)ϵxn,i,jϭ1,2,...,L,isasolutiontoEq.
͑1͒,indicatingthatfullysynchronizedchaoticstatesarepos-sible.ForthissynchronouschaoticstatetobeobservablethecorrespondingN-dimensionalmanifoldmustbeattractingorstable.Belowwederivethecriterionforthestabilityofthis*
Electronicaddress:ding@walt.css.fau.edu
†Electronicaddress:yang@walt.css.fau.edu
PHYSICALREVIEWEOCTOBER1997VOLUME56,NUMBER4561063-651X/97/56͑4͒/4009͑8͒/$10.004009©1997TheAmericanPhysicalSociety