
红外连续变焦镜头的结构设计
摘要:随着红外光学技术的长足发展及其实际应用范围的不断扩展,对红外连续变焦光学系统的需求日益增强。为了验证红外连续变焦镜头的变倍性能及其成像质量,根据某红外连续变焦镜头的光学设计特点,通过对其机械结构进行选型,最终采用不同形式的凸轮机构来实现红外变焦距镜头变倍、调焦过程,对凸轮机构、变倍导向机构、调焦机构等作了较详细的说明,并从机械设计的角度出发,对系统的杂散辐射提出了抑制措施。装调结果表明,采用凸轮机构、变倍导向机构可以实现红外连续变焦镜头的变倍及调焦过程,提出的杂散辐射措施可以有效地抑制系统的杂散辐射,提高镜头的成像质量。
关键词:红外连续变焦镜头;凸轮机构;导向机构;杂散辐射
中图分类号:TN216文献标识码:A文章编号:1672-9870(2009)01-0060-04
收稿日期:200801
作者简介:李永刚(1979
统,共有14片透镜,包括变焦物镜系统和二次成像系统。镜片数目的增加,有利于校正像差,可提高像质;二次成像系统的作用是为了减小物镜的直径同时保证100%的冷屏效率。
1.2变倍组导向机构选型
连续变焦镜头在连续变焦的过程中,光轴随着变倍和补偿镜组的位移始终在跳动,而光轴跳动量的大小直接影响系统的性能指标。所以变倍、补偿镜组的导向机构设计是此红外变焦距镜头结构设计的核心。变焦距镜头导向机构的种类很多,按接触摩擦性质可分成两大类:滑动摩擦机构和滚动摩擦机构。滑动摩擦机构是导轨与移动镜组之间采用滑动接触方式,滚动机构是导轨与移动镜组之间采用滚动方式[1]。常用的变倍机构有以下几种形式[2]:
1.圆柱导轨滑动机构。这种结构变倍精度高,径向结构尺寸小,适用于变倍和补偿组光学通光口径较小的结构。
2.两根圆柱导轨滑动机构。由于滑动部件为两根圆柱导轨,这种结构变倍精度高,承载的负荷也比第一种大。但是由于是超定位结构,光学通光口径太大,容易产生机构卡死现象,机构的径向尺寸也较大,一般适用通光口径30~80mm的结构。
3.三根圆柱导轨滑动机构。这种结构的优点是运动舒适、平稳,不容易产生卡死现象,可以带动通光口径较大的光学组件。缺点是运动精度较前两种低,一般适用通光口径50~120mm的结构。
滚动摩擦机构就是在上述滑动摩擦机构的基础上,加上精密轴承或者精密钢球等,来减小摩擦力矩,提高系统总体性能。
根据以上经验,本文选用两根圆柱导轨形式,并且在变倍、补偿镜组与圆柱导轨之间采用精密直线轴承配合,使该机构由滑动摩擦变为滚动摩擦。
1.3调焦机构选型
调焦组的作用是通过调焦机构,使调焦镜组沿光轴方向移动,以保证在远近不同距离上的物体,都能清晰地成像在像面上。因此,它的机构优劣直接影响到变焦距镜头的成像质量。
光学系统调焦机构大体有三种方式,一种是凸轮调焦[3],一种是采用直线电机调焦[4],另一种是丝杠丝母调焦。考虑到调焦系统行程短,通光口径比较大,如果采用丝杠丝母调焦或者直线推进调焦机构,对加工装配要求就很严格,而且很容易出现卡滞现象。而采用简单的凸轮机构实现调焦过程,可以避免上述的缺点。
2主要机械结构设计
2.1凸轮机构设计
由于补偿组作非线性移动,直接的直线驱动很难控制其与变倍组线性同步,而采用圆柱凸轮,由凸轮的旋转同时带动变倍、补偿镜组实现直线移动,可使得驱动控制简单易行。
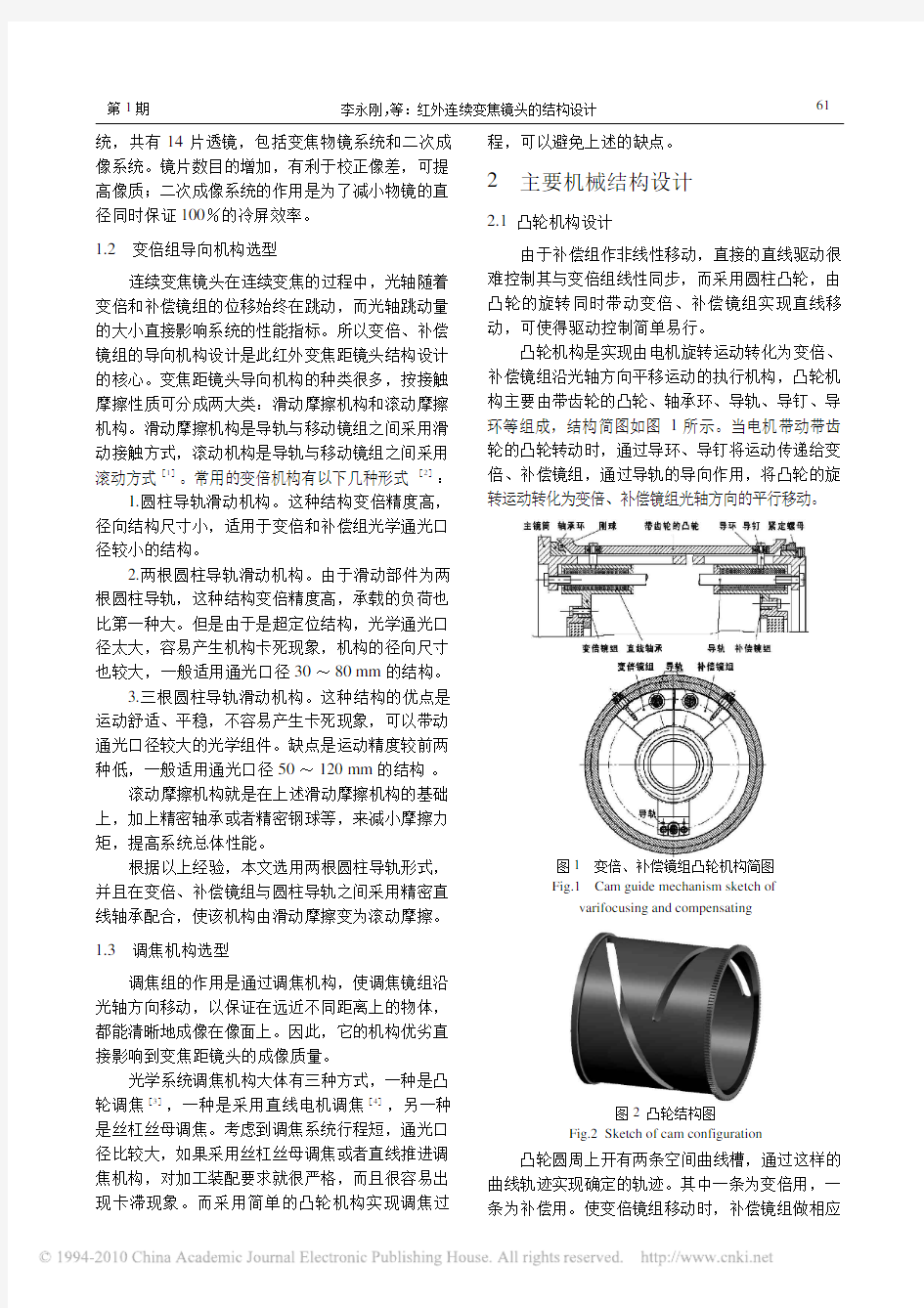
凸轮机构是实现由电机旋转运动转化为变倍、补偿镜组沿光轴方向平移运动的执行机构,凸轮机构主要由带齿轮的凸轮、轴承环、导轨、导钉、导环等组成,结构简图如图1所示。当电机带动带齿轮的凸轮转动时,通过导环、导钉将运动传递给变倍、补偿镜组,通过导轨的导向作用,将凸轮的旋
转运动转化为变倍、补偿镜组光轴方向的平行移动。
图1变倍、补偿镜组凸轮机构简图
Fig.1Cam guide mechanism sketch of
varifocusing and
compensating
图2凸轮结构图
Fig.2Sketch of cam configuration
凸轮圆周上开有两条空间曲线槽,通过这样的曲线轨迹实现确定的轨迹。其中一条为变倍用,一条为补偿用。使变倍镜组移动时,补偿镜组做相应
李永刚,等:红外连续变焦镜头的结构设计
第1期61
移动以做补偿用,凸轮示意图如图2所示。凸轮槽等宽,两条槽严格按照光学性能曲线加工,加工后凸轮槽的两端可以用作机械限位。凸轮两端滚道做成轴承形式,用精密钢球支撑,与精密钢球接触的两滚道面通过激光淬火工艺,其硬度可达60HRC,使得转动时由滑动摩擦变为滚动摩擦,减小摩擦力。前、后轴承环与主支撑镜筒组合加工,这样可有效保证轴承环的同轴度、圆度等形位公差要求。装配时调整紧定螺母,使凸轮运转自如,且钢球相对凸轮及轴承环的间隙为零,保证轴向、径向精度,然后锁定紧定螺母。
2.2变倍、补偿镜组导向机构设计
设计变倍、补偿镜组导向机构的关键就是要在变倍过程中,尽量减小光轴的跳动量,即保证两镜组的同轴度。为保证变倍、补偿镜组的同轴度,主镜筒左端固定支承法兰与主镜筒右端一次镗孔,保证两孔的同轴。使三根导轨平行光轴,使两镜组同轴,导轨外圆柱面必须一次装夹磨削,这样其形位公差保持一定精度。两镜组与导轨采用直线轴承配合,使其由滑动摩擦转化为滚动摩擦,可有效的减小电机的输出力矩。
由于系统总体要求变倍过程中正反行程光轴晃动小于60",而直线轴承与直线导轨的倾角与镜组的倾角为1:1,变倍、补偿镜组中的直线导轨与直线轴承相接触的有效长度为34mm,故直线导轨与轴承的配合间隙应小于b=34tg60"=0.01mm,因此,直线导轨要求与直线轴承配作,间隙为0.008~0.01mm。
变倍、补偿镜组各采用两根导轨导向,其中与直线轴承配合的两根导轨分别与两镜组相连,限制镜组的径向运动,第三根导轨共用,限制镜组的转动,从而保证镜组平稳的轴向运动。另外,导环与凸轮中的两条凸轮槽配合,导环材料选用二硫化钼,二硫化钼是一种优质固体润滑剂,在运动过程中有自润滑的作用。
2.3调焦系统及其凸轮机构设计
红外光学材料的折射率温度变化系数较大,比可见光大一个数量级以上,所以折射式红外光学系统的像面热漂移比可见光系统大同样的数量级,环境温度变化会造成红外光学系统产生热离焦并导致像质降低。因此在设计红外光学系统时就要考虑对因温度变化而引起的系统离焦现象。而对于红外光学镜片来说,相对厚度h/D越小,其膨胀系数越大,则温度差对成像质量影响越大;反之,相对厚度h/D越大,其膨胀系数越小,则温度差对像质影响就越小。在本系统中,前物镜组的相对厚度h/D 比其他几组小很多,故在前物镜组处设计调焦系统。
紧定螺母导环导钉
前物镜组镜筒
导向镜筒
带齿轮的凸轮
图3调焦凸轮机构简图
Fig.3Cam mechanism sketch for focusing 调焦凸轮机构主要由带齿轮的凸轮、导向镜筒、导钉、导环等组成,其结构简图如图3所示。凸轮圆周上加工两条等宽的曲线槽,当电机带动凸轮转动时,通过导环、导钉将运动传递给前物镜组,导向镜筒开有两个等宽的导向槽,因导向镜筒的直线导向槽限制了导环的运动轨迹,故凸轮正反转动时,会带动前物镜组做往复直线运动。
前物镜组镜筒外圆与导向镜筒内圆配作,配作间隙要求为0.01mm,前物镜组镜筒长44mm,所
以调焦过程中的光轴晃动角
小,然后设置一孔径光栏,其大小与光学孔径光阑的像相同,位置放在光学孔径光阑的像面处,使得孔径光栏前的所有非成像物体都不能被像面看到,而在孔径光栏到像面之间的诸多表面则可见,这样系统的表现就会得到改善;与孔径光栏相反,设置一视场光栏,其大小与光学视场光阑的像相同,位置放在光学视场光阑的像面处,使得视场光栏后的镜筒表面不能从视场外的物空间看到,即视场光栏
限制了被照射表面的面积。按上述原则给镜头加入光栏后,即不降低像面照度,也不减小视场,更不会引起渐晕,但却可以有效地抑制杂散辐射。图4 (a)为没有加光栏之前的图像,(b)为加光栏之后的图
像,可以看出,图像质量明显有所提高。
(a)
未加光栏的图像
(b)加光栏之后的图像
图4光栏对系统杂散辐射的影响
Fig.4Effect of stop on stray radiation
其次,在镜筒的内表面加工出若干条0.35mm 宽的齿纹,并且镜筒经过染黑处理,利用镜筒内壁对杂散辐射的散射和吸收,从而对到达像面的杂散辐射能量进行有效衰减,达到抑制杂散辐射的目的。或者光机结构表面采用消杂光涂料,以利用涂料的表面粗糙度和多孔性散射和吸收杂散光,也是消除杂散辐射的有效途径。
4装调后镜头的检测与成像
对装调好的红外镜头进行光学检测,结果表明,变倍过程中光轴晃动量小于1′。对一景物进行实时成像,可以看出,该系统在从长焦到短焦的变化过程中成像连续清晰,目标与背景的对比度比较鲜明,高、低温,振动环境下变倍、调焦机构运转正常,满足一般情况下的使用。图5为装调后镜
头的变焦过程。
图5装调后红外镜头的变焦过程Fig.5Zoom process of infrared zoom lens
当然,由于系统采用透射式光路,且镜片数目很多,从而造成红外镜头整体的透过率不是很高,使得其成像质量不如定焦或者两档红外镜头的成像质量高。不过作为对红外连续变焦镜头的一次尝试探索,其结果对红外变焦镜头的进一步研究还是有很大的指导意义。
5结论
欲验证红外连续变焦镜头的变倍性能及成像质量,设计一套精密的、满足性能指标要求的、安全可靠的、适用的变倍、调焦机构是必要的。经过初步的实验证明,本文采用的凸轮机构、导向机构均获得了较好的结果,能很好地达到所需要的目的,并具有很好的可靠性。抑制杂散辐射措施切实可行,为以后进一步完善红外连续变焦镜头的各项性能指标打下了坚实的基础。
参考文献
[1]张治中,李晓惕.变焦距镜头导向机构的类型[J].光学机械,1991(5):50
1759.
[3]丁亚林,田海英,王家骐.空间遥感相机调焦机构设计[J].
光学精密工程,2001,9(1):35
48.
[5]王骞,张景旭,郭劲.红外系统中杂散辐射的抑制方法[J].
光机电信息,2002(12):21
红外图像与可见光图像融合 ——笔记 图像融合是将来自不同传感器在同一时间(或者不同时间)对同一目标获取的两幅或者多幅图像合成为一幅满足某种需求图像的过程。 为了获得较好的融合效果,在研究融合算法之前,对图像预处理理论及方法进行了研究。预处理理论主要包括图像去噪、图像配准和图像增强。图像去噪目的是为了减少噪声对图像的影响。图像配准是使处于不同状态下的图像达到统一配准状态的方法。图像增强是为了突出图像中的有用信息,改善图像的视觉效果,并方便图像的进一步融合。 图像融合评价方法:主观评价和客观评价。指标如:均值、标准差、信息熵等。 针对 IHS 变换和小波变换的优缺点,本文提出了一种基于这两种变换结合的图像融合方法。该算法的具体实现步骤如下:先对彩色可见光图像进行 IHS 变换,对红外图像进行增强,然后将变换后得到的 I 分量与已增强的红外图像进行 2 层小波分解,将获得的低频子带和高频子带使用基于窗口的融合规则,而后对分量进行小波重构和 IHS 逆变换,最后得到融合结果。经仿真实验证明,此结果优于传统 IHS 变换和传统小波变换,获得了较好的融合结果,既保持了可见光图像中的大量彩色信息又保留了红外图像的重要目标信息。 红外传感器反映的是景物温度差或辐射差,不易受风沙烟雾等复杂条件的影响。一般来说,红外图像都有细节信息表现不明显、对比度低、成像效果差等缺点,因此其可视性并不是很理想。 可见光成像传感器与红外成像传感器不同,它只与目标场景的反射有关与其他无关,所以可见光图像表现为有较好的颜色等信息,反应真实环境目标情况,但当有遮挡时就无法观察出遮挡的目标。 利用红外传感器发现烟雾遮挡的目标或在树木后的车辆等。在夜间,人眼不能很好的辨别场景中的目标,但由于不同景物之间存在着一定的温度差,可以利用红外传感器,它可以利用红外辐射差来进行探测,这样所成的图像虽然不能直接清晰的观察目标,但是能够将目标的轮廓显示出来,并能依据物体表面的温度和发射率的高低把重要目标从背景中分离出来,方便人眼的判读。但由于自身成像原理以及使用条件等原因,所形成图像具有噪声大、对比度低、模糊不清、视觉效果差等问题。不利于人眼判读。 可以将两者图像融合在一起,这样可以丰富图像信息,提高图像分辨率,增强图像的光谱信息,弥补单一传感器针对特定场景表达的不全面,实现对场景全面清晰准确的表达。 两者的主要区别有: (1)可见光图像与红外图像的成像原理不同,前者依据物体的反射率的不同进行成像,后者依据物体的温度或辐射率不同进行成像,因此红外图像的光谱信息明显不如可见光图像。
万方数据
第1期李永刚.等:红外连续变焦镜头的结构设计61 统,共有14片透镜,包括变焦物镜系统和二次成像系统。镜片数日的增加,有利于校正像差,可提高像质;二次成像系统的作用是为了减小物镜的直径同时保证100%的冷屏效率。 1.2变倍组导向机构选型 连续变焦镜头在连续变焦的过程中,光轴随着变倍和补偿镜组的位移始终在跳动,而光轴跳动量的大小直接影响系统的性能指标。所以变倍、补偿镜组的导向机构设计是此红外变焦距镜头结构设计的核心。变焦距镜头导向机构的种类很多,按接触摩擦性质可分成两大类:滑动摩擦机构和滚动摩擦机构。滑动摩擦机构是导轨与移动镜组之间采用滑动接触方式,滚动机构是导轨与移动镜组之间采用滚动方式…。常用的变倍机构有以下几种形式¨】:1.圆柱导轨滑动机构。这种结构变倍精度高,径向结构尺寸小,适用于变倍和补偿组光学通光口径较小的结构。 2.两根圆柱导轨滑动机构。由于滑动部件为两根圆柱导轨,这种结构变倍精度高,承载的负荷也比第一种大。但是由于是超定位结构,光学通光口径太大,容易产生机构卡死现象,机构的径向尺寸也较大。一般适用通光口径30—80mm的结构。 3.三根圆柱导轨滑动机构。这种结构的优点是运动舒适、平稳,不容易产生卡死现象,可以带动通光口径较大的光学组件。缺点是运动精度较前两种低,一般适用通光口径50—120mm的结构。 滚动摩擦机构就是在上述滑动摩擦机构的基础上,加上精密轴承或者精密钢球等,来减小摩擦力矩,提高系统总体性能。 根据以上经验,本文选用两根圆柱导轨形式,并且在变倍、补偿镜组与圆柱导轨之间采用精密直线轴承配合,使该机构由滑动摩擦变为滚动摩擦。1.3调焦机构选型 调焦组的作用是通过调焦机构,使调焦镜组沿光轴方向移动,以保证在远近不同距离上的物体,都能清晰地成像在像面上。因此,它的机构优劣直接影响到变焦距镜头的成像质量。 光学系统调焦机构大体有三种方式,一种是凸轮调焦¨1,一种是采用直线电机调焦…,另一种是丝杠丝母调焦。考虑到调焦系统行程短,通光口径比较大,如果采用丝杠丝母调焦或者直线推进调焦机构,对加工装配要求就很严格,而且很容易出现卡滞现象。而采用简单的凸轮机构实现调焦过程,可以避免上述的缺点。 2主要机械结构设计 2.1凸轮机构设计 由于补偿组作非线性移动,直接的直线驱动很难控制其与变倍组线性同步,而采用圆柱凸轮,由凸轮的旋转同时带动变倍、补偿镜组实现直线移动,可使得驱动控制简单易行。 凸轮机构是实现由电机旋转运动转化为变倍、补偿镜组沿光轴方向平移运动的执行机构,凸轮机构主要由带齿轮的凸轮、轴承环、导轨、导钉、导环等组成,结构简图如图1所示。当电机带动带齿轮的凸轮转动时,通过导环、导钉将运动传递给变倍、补偿镜组,通过导轨的导向作用,将凸轮的旋转运动转化为变倍、补偿镜组光轴方向的平行移动。 图1变倍、补偿镜组凸轮机构简图 Fig.1Camguidemechanismsketchof varifocusingandcompensating 图2凸轮结构图 Fig.2Sketchofcamconfiguration 凸轮圆周上开有两条空间曲线槽,通过这样的曲线轨迹实现确定的轨迹。其中一条为变倍用,一 条为补偿用。使变倍镜组移动时,补偿镜组做相应 万方数据
6667设计计算 已知条件: (1)土压力系数计算 主动土压力系数: K a1=tan2(45°—φ1/2)=tan2(45°—10°/2)=0.70 a1=0.84 K a2=tan2(45°—φ2/2)=tan2(45°—18°/2)=0.52 a2=0.72 K a3=tan2(45°—φ3/2)=tan2(45°—19.2°/2)=0.64 a3=0.71 K a4=tan2(45°—φ4/2)=tan2(45°—18.9/2)=0.52 a4=0.70 K a5=tan2(45°—φ5/2)=tan2(45°—19.2/2)=0.41 a5=0.72 被动土压力系数: K p1=tan2(45°+φ5/2)=tan2(45°+19.2°/2)=1.98 p1=1.40 (2)水平荷载和水平抗力的计算 水平荷载计算: e a=q0k a1-2C=20×0.59-2×10×0.84=-5kPa e ab上=(q0+h1)K a1-2c1a1=(20+18×2.5)×0.59-2×10×0.84=21.55kPa e ab下=(q0+h1)K a2-2c2a2=(20+18×2.5)×0.36-2×19×0.6=0.6kPa e ac上=(q0+h1+h2)K a2-2c2a2=(20+18×2.5+19.9×1.1)×0.36-2×19× 0.6=8.48kPa e ac下=(q0+h1+h2)K a3-2c3a3=(20+18×2.5+19.9×1.1)×0.64-2×44×0.8=-14.79kPa e ad上=(q0+h1+h2+h3)K a3-2c3a3=(20+18×2.5+19.9×1.1+18.8×1.4)× 0.64-2×44×0.8=2.05kPa e ad下=(q0+h1+h2+h3)K a4-2c4a4=(20+18×2.5+19.9×1.1+18.8×1.4)× 0.34-2×21×0.59=13.71kPa e ae上=(q0+h1+h2+h3+h4)K a4-2c4a4=(20+18×2.5+19.9×1.1+18.8×1.4+19.9×0.5)×0.34-2×21×0.59=17.09kPa e ae下=(q0+h1+h2+h3+h4)K a5-2c5a5=(20+18×2.5+19.9×1.1+18.8×1.4
?图像识别? 文章编号:1005-0086(2000)05-0537-03 红外图像融合! 张加友,王江安1 (军事交通学院基础部,天津300161;1.海军工程大学兵器工程系,湖北武汉430033) 摘要:研究了利用拉普拉斯金字塔技术,对可见光电视和红外图像融合过程中,各个相关层的像素点值 的选取规则的不同对融合结果的影响,对比实验证明,对不同的红外图像结构,需应用不同的对应点值 的选取规则。 关键词:图像融合;图像处理;红外图像;拉普拉斯金字塔 中图分类号:TN911.73文献标识码:A Infrared Image Fusion ZHANG Jia-you,WANG Jiang-an (Miiitary Traffic Institute,Tianjin300161,China) Abstract:Photoeiectric tracking apparatus is powerfui defense eguipment on navai ship.Two important sensors were used:TV sensor and8~14!m IR sensor.It was freguentiy desirabie to combine the two images into a merged image. In this paper,the technoiogy of fusion IR images and TV images with Lapiacian Pyramid was studied.The seiecting ruie of the node vaiue from the coupie pyramid iayer was studied too.And the difference between merged the daui-IR im- ages and merged the TV and IR images was discussed. Key words:image fusion;image processing;IR image;Lapiacian Pyramid 1引言 空中运动目标的识别是空中预警系统的重要组成部分。在舰船空中预警系统中,光电跟踪仪具有重要的地位。它由可见光电视图像、激光测距、红外热像和红外跟踪点源等4个传感器组成。红外跟踪点源可以全天候红外跟踪,激光测距可准确测量目标的方位和距离;切换开关切换到电视通道,显示目标的可见光电视图像;切换开关切换到红外热像通道,显示目标的红外热图像。这样,系统可全天候工作。但在工作环境气候不佳时,如在多云情况,目标在云层穿越,在系统的两个通道切换过程中,常因切换过程长,使目标显示困难。解决问题有效办法是利用图像融合技术[1]。图像融合技术可将2幅图像有效的合成1幅图像,还能在1幅图像中显示2幅被融合图像的图像信息。将2幅图像对应的象素简单相加,会使图像信噪比降低[2],图像出现拼接的痕 迹。图1(a)、(b)所示,为256X256像素灰度图像s!2和s!4;图1(d) 所示 图1图像简单相加与拉普拉斯图像融合 Fig.1Images pixels simply plus and Laplacian pyramid images fusion 光电子?激光第11卷第5期2000年10月 JOURNAL OF OPTOELECTRONICS?LASER Voi.11No.5Oct.2000 !收稿日期:2000-01-04修订日期:2000-05-17
目录 1 设计资料 (1) 2 板的设计 (1) 2.1 荷载 (2) 2.2 力计算 (2) 2.3 截面承载力计算 (3) 3 次梁设计 (3) 3.1 荷载 (4) 3.2 力计算 (4) 3.3 截面承载力计算 (5) 4 主梁计算 (7) 4.1 荷载 (7) 4.2 力计算 (7) 4.3 截面承载力计算 (11) 4.4 主梁吊筋计算 (13) 参考文献 (13)
某工业厂房单向板肋梁楼盖 1 设计资料 某工业厂房设计使用年限为50年,安全等级为二级,环境类别为一类。结构形式采用框架结构,其中梁柱线刚度比均大于3。楼盖采用钢筋混凝土现浇单向板肋梁楼盖,厂房底层结构布置图见图1。楼面做法、边梁、墙、及柱的位置关系见图2。 图1 底层结构布置图 楼面活荷载标准值8kN/m2,楼面面层为20mm水泥砂浆, 梁板的天棚抹灰为20mm厚混合砂浆。材料选用混凝土:采用 C30(f c=14.3 N/mm2)钢筋:梁的受力纵筋采用HRB335级钢筋 (f y=300 N/mm2),其余采用HRB300级钢筋(f y=270 N/mm2)。 2 板的设计 板按塑性力重分布方法设计。按刚度条件板厚要求取 h=L/30=2000/30≈67mm,工业厂房楼面最小厚度为70mm,取板 厚h=80mm。取次梁截面高度h=450mm(L/18=6000/18=333mm~ L/12=6000/12=500mm),截面宽度 b=200mm(h/2.5=450/2.5=180mm~h/2=450/2=225mm),主梁和次 梁采用HRB335级,其余均采用HPB300级钢筋;板的L2/L1=6000/2000=3,宜按单向板设计。板的几何尺 图2 节点详图
红外连续变焦镜头的结构设计 摘要:随着红外光学技术的长足发展及其实际应用范围的不断扩展,对红外连续变焦光学系统的需求日益增强。为了验证红外连续变焦镜头的变倍性能及其成像质量,根据某红外连续变焦镜头的光学设计特点,通过对其机械结构进行选型,最终采用不同形式的凸轮机构来实现红外变焦距镜头变倍、调焦过程,对凸轮机构、变倍导向机构、调焦机构等作了较详细的说明,并从机械设计的角度出发,对系统的杂散辐射提出了抑制措施。装调结果表明,采用凸轮机构、变倍导向机构可以实现红外连续变焦镜头的变倍及调焦过程,提出的杂散辐射措施可以有效地抑制系统的杂散辐射,提高镜头的成像质量。 关键词:红外连续变焦镜头;凸轮机构;导向机构;杂散辐射 中图分类号:TN216文献标识码:A文章编号:1672-9870(2009)01-0060-04 收稿日期:200801 作者简介:李永刚(1979
统,共有14片透镜,包括变焦物镜系统和二次成像系统。镜片数目的增加,有利于校正像差,可提高像质;二次成像系统的作用是为了减小物镜的直径同时保证100%的冷屏效率。 1.2变倍组导向机构选型 连续变焦镜头在连续变焦的过程中,光轴随着变倍和补偿镜组的位移始终在跳动,而光轴跳动量的大小直接影响系统的性能指标。所以变倍、补偿镜组的导向机构设计是此红外变焦距镜头结构设计的核心。变焦距镜头导向机构的种类很多,按接触摩擦性质可分成两大类:滑动摩擦机构和滚动摩擦机构。滑动摩擦机构是导轨与移动镜组之间采用滑动接触方式,滚动机构是导轨与移动镜组之间采用滚动方式[1]。常用的变倍机构有以下几种形式[2]: 1.圆柱导轨滑动机构。这种结构变倍精度高,径向结构尺寸小,适用于变倍和补偿组光学通光口径较小的结构。 2.两根圆柱导轨滑动机构。由于滑动部件为两根圆柱导轨,这种结构变倍精度高,承载的负荷也比第一种大。但是由于是超定位结构,光学通光口径太大,容易产生机构卡死现象,机构的径向尺寸也较大,一般适用通光口径30~80mm的结构。 3.三根圆柱导轨滑动机构。这种结构的优点是运动舒适、平稳,不容易产生卡死现象,可以带动通光口径较大的光学组件。缺点是运动精度较前两种低,一般适用通光口径50~120mm的结构。 滚动摩擦机构就是在上述滑动摩擦机构的基础上,加上精密轴承或者精密钢球等,来减小摩擦力矩,提高系统总体性能。 根据以上经验,本文选用两根圆柱导轨形式,并且在变倍、补偿镜组与圆柱导轨之间采用精密直线轴承配合,使该机构由滑动摩擦变为滚动摩擦。 1.3调焦机构选型 调焦组的作用是通过调焦机构,使调焦镜组沿光轴方向移动,以保证在远近不同距离上的物体,都能清晰地成像在像面上。因此,它的机构优劣直接影响到变焦距镜头的成像质量。 光学系统调焦机构大体有三种方式,一种是凸轮调焦[3],一种是采用直线电机调焦[4],另一种是丝杠丝母调焦。考虑到调焦系统行程短,通光口径比较大,如果采用丝杠丝母调焦或者直线推进调焦机构,对加工装配要求就很严格,而且很容易出现卡滞现象。而采用简单的凸轮机构实现调焦过程,可以避免上述的缺点。 2主要机械结构设计 2.1凸轮机构设计 由于补偿组作非线性移动,直接的直线驱动很难控制其与变倍组线性同步,而采用圆柱凸轮,由凸轮的旋转同时带动变倍、补偿镜组实现直线移动,可使得驱动控制简单易行。 凸轮机构是实现由电机旋转运动转化为变倍、补偿镜组沿光轴方向平移运动的执行机构,凸轮机构主要由带齿轮的凸轮、轴承环、导轨、导钉、导环等组成,结构简图如图1所示。当电机带动带齿轮的凸轮转动时,通过导环、导钉将运动传递给变倍、补偿镜组,通过导轨的导向作用,将凸轮的旋 转运动转化为变倍、补偿镜组光轴方向的平行移动。 图1变倍、补偿镜组凸轮机构简图 Fig.1Cam guide mechanism sketch of varifocusing and compensating 图2凸轮结构图 Fig.2Sketch of cam configuration 凸轮圆周上开有两条空间曲线槽,通过这样的曲线轨迹实现确定的轨迹。其中一条为变倍用,一条为补偿用。使变倍镜组移动时,补偿镜组做相应 李永刚,等:红外连续变焦镜头的结构设计 第1期61
中波红外连续变焦光学系统设计 尹 娜,孟庆超,齐雁龙,张运强 (中国空空导弹研究院,河南洛阳 471009) 摘要:针对中波红外制冷式凝视焦平面阵列探测器,探讨了红外连续变焦系统的设计方法,并在考虑红外吊舱使用要求的基础上,设计了结构紧凑、质量轻便的机械补偿5×连续变焦光学系统。该系统工作波段3~5μm,F#为2.0,变焦范围30~150mm,变焦轨迹短而平滑,且在全焦距范围内成像质量良好。系统由7片透镜组成,采用二次成像结构,在实现冷光阑效率100%的同时缩小了系统径向尺寸。关键词:吊舱;连续变焦;二次成像;冷光阑效率 中图分类号:TN216 文献标识码:A 文章编号:1001-8891(2009)12-0694-04 Middle Infrared Continuous Zoom Optical System YIN Na,MENG Qing-chao,QI Yan-long,ZHANG Yun-qiang (China Airborne Missile Academy, Luoyang Henan 471009, China) Abstract:The designing process of infrared continuous zoom system for cooling detector with staring focal plane array has been discussed and a mechanical compensation 5× continuous zoom optical system with compact size and low weight has been presented based on the requirements of pod-using. The spectral band of the system is 3~5μm. and F#is 2.0. It can realize 30~150mm continuous zoom with a short and smooth zoom path. In the whole zoom arrange it holds high image quality. The system has 7 lenses adopts secondary imaging structure. It has 100% cold shield efficiency and can reduce the radial size of the system. Key words:pod-using;continuous zoom;secondary imaging;cold shield efficiency 引言 近些年红外前视侦查、瞄准系统中越来越多的使用红外变焦系统,其中大视场用于在大范围内搜索目标,提高捕获概率,小视场分辨率较高,用于对目标进行识别、分析。目前多见的该类变焦系统为双视场变焦系统,这种系统结构简单,易于实现,但在两档切换的过程中会出现短时的目标模糊,影响探测跟踪的连续性[1,2]。基于上述现状,本文针对红外吊舱使用,设计了了一个用于中波红外制冷探测器的、结构紧凑、质量轻便、变焦曲线短而平滑的5×连续变焦光学系统。该系统在满足吊舱光学系统对空间、重量等因素的限制条件下,通过焦距连续变化,实现对不同视场目标成像,且在变焦过程中目标不会丢失。可以预见其在各种军事目标跟踪系统中应用前景广阔。 1 系统设计方案 1.1 原理分析 连续变焦光学系统是一种机械补偿变焦系统,机械补偿根据补偿镜组的光焦度正负分为正组补偿和负组补偿两种[3]。一般而言,若假设变倍组焦距取一样,正组补偿与负组补偿比较,正组补偿细而长,负组补偿短而粗,负组补偿二级光谱和光阑球差均比正组补偿大。对于小视场和对光阑球差、二级光谱要求较低的情况下,可选负组补偿;对于大视场光学系统,或焦距较长的大倍率光学系统,考虑需要的镜头通光口径和二级光谱小,采用正组补偿较好。本文系统设计参数要求最大视场±11.9°,通光孔径75mm,属视场和孔径偏大的系统,其色差和二级光谱较难校正,因此拟采用正组补偿结构形式进行系统初始结构计算。 本文系统采用的是中波红外制冷型探测器。与非制冷探测器相比,针对制冷型设计红外变焦光学系统还有其需要特别注意的地方:制冷型探测器本身携带的冷光阑决定了所设计的光学系统的出瞳位置和大小,这是由光学设计中光瞳衔接原则[4]决定的,满足该原则即满足所谓的冷光阑效率100%。否则,若冷 694
红外图像与可见光图像融合 笔记 图像融合是将来自不同传感器在同一时间(或者不同时间)对同一目标获取的两幅或者多幅图像合成为一幅满足某种需求图像的过程。 为了获得较好的融合效果,在研究融合算法之前,对图像预处理理论及方法进行了研究。预处理理论主要包括图像去噪、图像配准和图像增强。图像去噪目的是为了减少噪声对图像的影响。图像配准是使处于不同状态下的图像达到统一配准状态的方法。图像增强是为了突出图像中的有用信息,改善图像的视觉效果,并方便图像的进一步融合。 图像融合评价方法:主观评价和客观评价。指标如:均值、标准差、信息熵等。 针对IHS变换和小波变换的优缺点,本文提出了一种基于这两种变换结合的图像融合方法。该算法的具体实现步骤如下:先对彩色可见光图像进行IHS变换,对红外图像进行增强,然后将变换后得到的I分量与已增强的红外图像进 行2层小波分解,将获得的低频子带和高频子带使用基于窗口的融合规则,而后对分量进行小波重构和IHS逆变换,最后得到融合结果。经仿真实验证明,此结果优于传统IHS变换和传统小波变换,获得了较好的融合结果,既保持了可见光图像中的大量彩色信息又保留了红外图像的重要目标信息。 红外传感器反映的是景物温度差或辐射差,不易受风沙烟雾等复杂条件的影响。一般来说,红外图像都有细节信息表现不明显、对比度低、成像效果差等缺点,因此其可视性并不是很理想。 可见光成像传感器与红外成像传感器不同,它只与目标场景的反射有关与其他无关,所以可见光图像表现为有较好的颜色等信息,反应真实环境目标情况,但当有遮挡时就无法观察出遮挡的目标。 利用红外传感器发现烟雾遮挡的目标或在树木后的车辆等。在夜间,人眼不 能很好的辨别场景中的目标,但由于不同景物之间存在着一定的温度差,可以利用红外传感器,它可以利用红外辐射差来进行探测,这样所成的图像虽然不能直接清晰的观察目标,但是能够将目标的轮廓显示出来,并能依据物体表面的温度和发射率的高低把重要目标从背景中分离出来,方便人眼的判读。但由于自身成像原理以及使用条件等原因,所形成图像具有噪声大、对比度低、模糊不清、视觉效果差等问题。不利于人眼判读。 可以将两者图像融合在一起,这样可以丰富图像信息,提高图像分辨率,增强图像的光谱信息,弥补单一传感器针对特定场景表达的不全面,实现对场景全面清晰准确的表达。 两者的主要区别有: (1)可见光图像与红外图像的成像原理不同,前者依据物体的反射率的不同进行成像,后者依据物体的温度或辐射率不同进行成像,因此红外图像的光谱信 息明显不如可见光图像。
目录 第一章编制依据及说明 (1) 第二章工程概况 (2) 第一节建筑设计特点 (2) 第二节结构设计特点 (2) 第三章现场平面布置 (3) 第一节平面布置原则 (3) 第二节施工现场平面布置图 (3) 第三节施工道路 (3) 第四节材料堆放 (3) 第四章施工方案 (4) 第一节施工准备 (4) 第二节施工现场临时用电 (4) 第三节施工现场临时用水 (5) 第四节施工测量 (5) 第五节沉降观测周期的确定 (6) 第六节砌体工程施工方案 (7) 1. 概况 (7) 2. 砌体材料 (7) 3. 施工准备 (7) 4. 砌筑方法 (8) 5. 构造拄的施工 (8) 6. 脚手架工程施工 (10) 7. 质量控制要点 (17) 8. 安全措施 (18) 9. 冬季施工 (18) 第七节混凝土工程施工方案 (19) 1. 施工部署 (19) 2. 施工方法 (19) 3. 质量要求 (23) 4. 冬季施工 (24) 第八节钢筋工程施工方案 (25)
1. 施工准备 (25) 2. 主要施工方法 (26) 3. 技术质量保证措施 (29) 4. 安全消防措施 (31) 5. 环保与文明施工措施 (31) 6. 冬季施工 (32) 第五章施工组织及施工进度计划 (33) 第一节施工段的划分 (33) 第二节主要工序 (33) 第三节劳动力安排 (34) 第四节施工管理机构和项目经理部的组成 (34) 第五节施工进度计划及措施 (35) 1. 进度计划监督管理 (35) 2. 施工进度计划 (36) 第六节施工协调配合 (36) 第六章质量保证措施 (38) 第一节施工质量把关措施 (38) 第二节施工现场监督检查 (38) 第七章工期保证措施 (39) 第一节建立严格的施工进度计划检查制度 (39) 第二节保证材料及外加工构件的供应 (39) 第三节土建与安装的配合协调工作 (39) 第八章施工技术措施 (40) 第一节采用新技术、新工艺 (40) 第二节建立严格的技术管理体系 (40) 第三节施工过程技术控制 (40) 第九章安全施工措施 (41) 第一节安全生产组织机构 (41) 第二节安全保证体系 (41) 第三节安全用电管理措施 (41)
红外连续变焦镜头 一、基本原理 利用光学系统中两个或两个以上透镜组的移动,改变光学系统的组合焦距,同时保持像面位置不动,且在变焦过程中像质始终保持良好。 二、光学系统 机械补偿变焦系统:各运动组元按不同的运动规律作相对复杂的对应移动,最终达到防止像面移动的目的。机械补偿法变焦镜头:一组透镜做线性移动(通称变倍组)以改变焦距,另一组透镜(通称补偿组)作少量非线性移动以补偿像面位移,来达到光学系统既变倍而像面位置又稳定的要求。变倍组一般是负透镜组,补偿组有取正透镜组,也有取负透镜组的。补偿透镜组的移动与变倍透镜组的移动方向不同且不等速,但它们的相对运动却有严格的对应关系,各透镜组通过一个复杂的凸轮机构实现相对运动。这类变焦距镜头的焦距在一定范围内连续改变。 三、光学结构 机械补偿变焦距镜头,其光学结构由前固定组,变倍组,补偿组,后固定组组成。 1、前固定组:其作用是给系统提供固定的像; 2、变倍组:担负着系统的变倍作用,做线性移动以改变焦距; 3、补偿组:按一定的曲线轨迹作非线性运动,以补偿变倍组在变倍过程中所产生的像面移动;
4、后固定组:用于将补偿组的像转化为系统的最后实像,并调整系统的合成焦距值、设备孔径光阑,保证在变焦运动中系统的相对孔径不变。 四、连续变焦机构 主要由电机、齿轮、变倍凸轮、限位装置、导向销、变倍组、补偿组、导向机构等组成,其中,导向机构和变倍凸轮设计是连续变焦机构的核心技术。工作原理为:当产品需要进行变焦时,由控制系统发给电机变倍信号,电机驱动齿轮,由齿轮带动变倍凸轮进行运动,此时,变倍组和补偿组通过导向销在满足函数关系的两条凸轮槽中进行运动,实现变倍组和补偿组直线运动,当变倍组和补偿组移动到两个极限位置时,通过压力开关来控制驱动电机的工作。精密电位计在齿轮的驱动下随变倍凸轮一起转动,电位计随着变倍凸轮转角的不同输出不同的电压,通过对电压值的换算可以得到系统的对应焦距。 1、变倍组导向机构 (1)一根光杠导轨和滚珠丝杠组合机构。这种结构精度较高,由于变倍和补偿同时移动的轨迹不同,需要两套导向驱动机构,占用较大空间,控制系统设计也有难度。 (2)两根圆柱导轨滑动机构。由于滑动部件为两根圆柱导轨,这种结构变倍精度高,承载的负荷也比第一种大。但是由于是超定位结构,光学通光口径太大,容易产生机构卡死现象,机构的径向尺寸也较大。一般适用通光口径30—80 mm的结构。 (3)三根圆柱导轨滑动机构。这种结构的优点是运动舒适、平
第15卷 第7期 2007年7月 光学精密工程 Optics and Precision Engineering Vol.15 No.7 J ul.2007 收稿日期:2007201222;修订日期:2007203220. 基金项目:国家自然科学基金资助项目(No.60471024) 文章编号 10042924X (2007)0721038206 中波红外连续变焦光学系统 郜洪云1,熊 涛2,杨长城2 (1.武汉理工大学,湖北武汉430070;2.华中光电技术研究所,湖北武汉430074) 摘要:针对制冷式320×240凝视焦平面阵列探测器,设计了一个中波红外连续变焦光学系统。该系统由变焦物镜系统和二次成像系统构成,包括7片透镜,引入一个非球面,并采用两个反射镜折叠光路。利用变焦系统原理和光学设计软件给出了系统的光学参数和外形结构图,并对其像质和冷反射进行了系统分析。该系统可以实现50~500mm 的连续变焦,工作波段为3.7~4.8μm ,满足100%冷光阑效率。结构紧凑,像质较好,变焦行程短,变焦轨迹平滑。关 键 词:红外光学系统;连续变焦;光学设计中图分类号:TN216 文献标识码:A Middle infrared continuous zoom optical system GAO Hong 2yun 1,XION G Tao 2,YAN G Chang 2cheng 2 (1.W uhan Uni versit y of Technolog y ,W uhan 430070,Chi na; 2.H uaz hon g I nstit ute of O ptoelect ronic Technolog y ,W uhan 430074,Chi na ) Abstract :For cool 320×240detector wit h staring focal plane array ,a middle inf rared continuous zoom a optical system was presented.The optical system using optical configuration of reflect mirror fold is composed of a zoo m object lens system and a secondary imaging system ,including seven lenses and two reflectors.Based on t he p ractical requirement and feat ure parameters of detector ,t he optical de 2sign parameters were given.U sing zoom system principle and optical design software ,t he schematic diagram ,modulatio n t ransfer f unction (M TF )curve ,spot diagram ,and Root Mean Square (RMS )value of t he spot diameter were investigated.Finally ,t he cold reflection ray 2t racing of short EFL end was st udied and t he correlative schematic diagram was also given.The result s indicate t hat t he optical system wit h 3.7~4.8μm spect ral region can realize 50~500mm continuous zoom and satisfy 100%cold shield efficiency.It has t he advantages of simple st ruct ure ,high image quality ,short zoom pat h and smoot h zoom locus.And moreover ,only one asp heric surface is adopted in t he system ,so t he system is in a low p rice and easy to machine and adjust. K ey w ords :infrared optical system ;continuous zoo m ;optical design
第38卷第4期 2016年8月 光学仪器 OPTICAL INSTRUMENTS Vol. 38,No. 4 August,2016 文章编号:1005-5630(2016)04-0303-05 基于视觉显著性的红外与可见光图像融合 华玮平S赵巨岭S李梦S高秀敏〃 (1.杭州电子科技大学电子信息学院,浙江杭州310018; 2.上海理工大学光电信息与计算机工程学院,上海200093) 摘要:多波段图像融合可以有效综合各个波段图像中包含的特征信息。针对可见光和红外图 像,提出了一种结合红外图像视觉显著性提取的双波段图像融合方法,一方面旨在凸显红外图 像的目标信息,另一方面又尽可能的保留了可见光图像的丰富细节信息。首先,在局部窗口内 实现红外图像的显著性图提取,并通过窗口尺寸的变化形成多尺度的显著性图,并对这些显著 性图进行最大值的优选叠加,以获取能反映整幅红外图像各个尺寸目标的显著性图;其次,通过 结合显著性图与红外图实现显著性图的加权增强;最后,利用增强的红外显著性图进行双波段 图像的融合。通过两组对比实验,数据表明该方法给出的融合图像视觉效果好,运算速度快,客 观评价值优于对比的7种融合方法。 关键词:图像融合;红外图像增强;视觉显著性 中图分类号:TN 911. 73 文献标志码:A doi:10. 3969/j. issa 1005-5630. 2016. 04. 005 Dual-band image fusion for infrared and visible images based on image visual saliency HUA Weiping1, ZHAO Jufeng1, LI Meng1, GAO Xiumin1,2 (1. Electronics and Information College, Hangzhou Dianzi University, Hangzhou 310018, China; 2. School of Optical-Electrical and Computer Engineering, University of Shanghai for Science and Technology, Shanghai 200093,China) Abstract: Dual-band image fusion is able to well synthesize the feature information from the different bands. To fuse visible and infrared images, in this paper, an infrared image visual saliency detection-based approach was proposed. This method aimed to highlight the target information from infrared image, meanwhile preserve abundant detail information from visible one as much as possible. Firstly, visual saliency map was extracted within a local window, and multiple window-based saliency maps could be obtained by changing the size of local window. And the final saliency map was generated by selecting maximum value, and this map could mirror all target information in the infrared image. Secondly,the saliency map was enhanced by combining infrared image and the previous saliency map. Finally, the enhanced saliency map was used for dual-band image fusion. Comparing with other seven methods, the 收稿日期:2015-10-13 基金项目:国家自然科学基金项目(61405052,61378035) 作者简介:华玮平(1994 ),男,本科生,主要从事光学成像等方面的研究。E-m ail:564810049@qq.c〇m 通信作者:赵巨峰(1985 ),男,讲师,主要从事光学成像、图像处理等方面的研究。E-m ail:daba〇zjf@https://www.doczj.com/doc/969398484.html,.C n
地下连续墙形式特点及构造型式分析 【摘要】近年来,随着地下连续墙技术的发展,其应用范围也更加广泛。地下连续墙适用于建造建筑物的地下室、地下油库、挡土墙、高层建筑等的深基础、逆作法施工的围护结构、工业建筑的竖井以及水工结构的堤坝防渗墙、护岸、码头、桥梁墩台、地下铁道、或临时围堰工程等。 【关键词】连续墙;形式;构造型式 地下连续墙是指采用合适的挖槽(孔)设备,沿着开挖工程的周边轴线,在泥浆护壁的条件下,挖出一个具有一定长度、宽度与深度的沟槽(孔槽),并在槽内设置预先制作的钢筋笼,然后采用导管法向槽内浇灌混凝土筑成一个单元墙段,依次施工,再以适当的接头形式将各单元墙段相互连接起来,最终构成完整的地下连续墙体 1、地下连续墙分类 地下连续墙可按如下方法分类: 1.1根据地下连续墙的结构型式 (1)槽式(或壁板式)地下连续墙(如图1)。采用挖槽设备(泥浆护壁),在地下挖出一个狭长的深槽,在槽内下入钢筋笼并浇灌混凝土使之形成一个单元墙段。然后将各单元墙段连接成整体,构成一道完整的槽式地下连续墙。 1表示开挖槽段,2表示未开挖槽段
(图1) (2)排桩式地下连续墙(如图2)。将单桩依次施工、连接,形成一道连续墙体。 (a)相切式(b)搭接式 (c)间隔式(d)交错式 图2 排桩式地下连续墙 (3)组合式地下连续墙。将壁式和排桩式工艺结合起来施工筑成的组合式墙体。 1.2按受力和支撑形式分类 可分为自立式、内撑式、锚定式、格形重力式和竖井式连续墙。 1.3按墙体材料分类 可分为钢筋混凝土墙、素混凝土墙、黏土墙、自凝泥浆墙和混合墙等若干种。 1.4按墙体施工方法分类 可分为就地浇注、预制及二者组合成墙。 1.5按接头形式分类 可分为非刚性接头如锁口管式、榫接式、搭接式,和刚性接头如I 型、十字型钢板接头。 1.6按用途不同分类 可分为结构墙、临时性支护墙、挡土墙、防渗心墙以及抗滑、隔振墙。
砖混结构墙下条形基础 设计实例 Document number:NOCG-YUNOO-BUYTT-UU986-1986UT
墙下条形基础设计实例 根据设计资料、工程概况和设计要求,教学楼采用墙下钢筋混凝土条形基础。基础材料选用C25混凝土,=t f mm 2;HPB235钢筋,=y f 210N/mm 2.。建筑场地工程地质条件,见附图-1所示。下面以外纵墙(墙厚)基础为例,设计墙下钢筋混凝土条形基础。 (一)确定基础埋深 已知哈 尔滨地区标准冻深Z o =2m,工程地质 条件如附图-1所示: 附图-1 建筑场地工程地质条件 根据建筑场地工程地质条件,初步选择第二层粉质粘土作为持力层。根据地基土的天然含水量以及冻结期间地下水位低于冻结面的最小距离为8m ,平均冻胀率η=4,冻胀等级为Ⅲ级,查表7-3,确定持力层土为冻胀性土,选择基础埋深d=。 (二)确定地基承载力 1、第二层粉质粘土地基承载力 查附表-2,地基承载力特征值aK f = KPa 按标准贯入试验锤击数N=6,查附表-3,aK f =二者取较小者,取aK f = 2、第三层粘土地基承载力
查附表-2,aK f =135 KPa ,按标准贯入锤击数查表-3,aK f =145 KPa ,二者取较小者,取aK f =135 KPa 。 3 、修正持力层地基承载力特征值 根据持力层物理指标e =, I L =,二者均小于。 查教材表4-2 =b η,=η (五)计算上部结构传来的竖向荷载 K F 对于纵横墙承重方案,外纵墙荷载传递途径为: 屋面(楼面)荷载→进深梁→外纵墙→墙下基础→地基 附图2 教学楼某教室平面及外墙剖面示意图 1、外纵墙(墙厚)基础顶面的荷载,取一个开间为计算单元(见附图-2) (1) 屋面荷载 恒载: 改性沥青防水层: m 2 1:3水泥沙浆20m m 厚: ?20=m 2 1:10 水泥珍珠岩保温层(最薄处100mm 厚+找坡层平均厚120mm ): ×4=m 2 改性沥青隔气层: m 2 1:3水泥沙浆20mm 厚: ×20=m 2 钢混凝土空心板120mm 厚: m 2 混合沙浆20mm 厚: ×17=m 2 ————————————————————————————————————