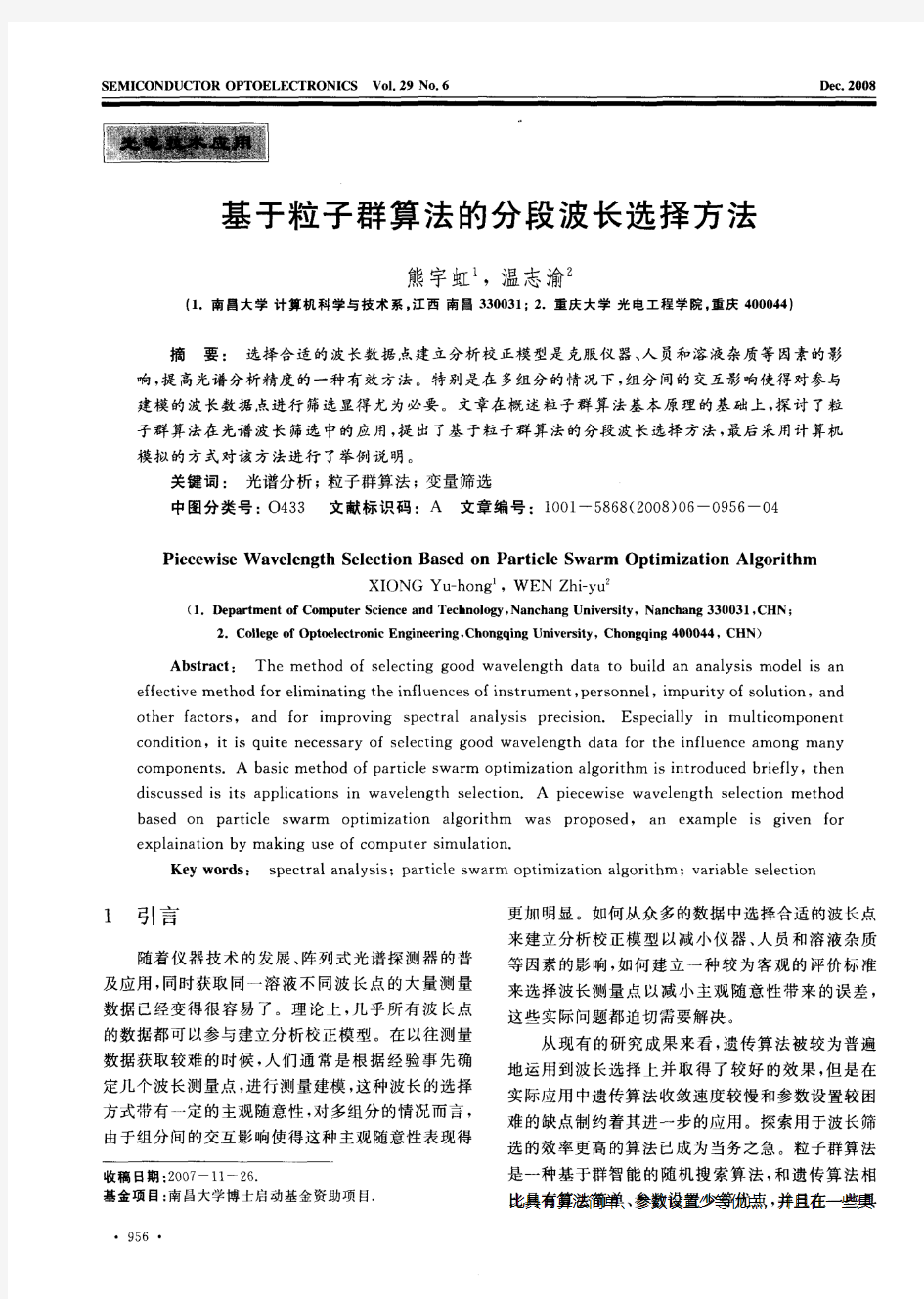
WDM光传送网的选路和波长分配算法 为了克服电处理的速率“瓶颈”,宽带网络向光网络发展。目前,光突发交换、光分组(包)交换正在积极研究中,但是距商用还较远。已可商用的是具有光分插复用器(OADM,OpticalAdd-DropMultiplexer)和光交叉连接器(OXC,OpticalCross-Connect)的波分复用(WDM)网络。由于是提供可调度的传送用光路,称这种网络为WDM光传送网(OTN,OpticalTransportNetwork)。 1网络结构 图1是网络物理结构的一个例子,虚线内为光传送网。图中有5个OXC:A,B,C,D,E;5个具有光接口的电设备:S1~S5;6个将OXC相连的物理链路:l1~l6。一般一条物理链路包含一对光纤供双向运用,有的OXC间没有物理链路相连。但更多的情况是一条物理链路包含多根光纤供不同方向运用。一根光纤上可采用多个波长。 一般情况下,OXC不直接和电设备相连,只起光交叉连接作用。 OXC可分为无波长变换和有波长变换(也可以是部分端
口有波长变换或波长变换的范围有限)两种:无波长变换的OXC的作用是将一根输入光纤上的某一波长信号连到另一根输出光纤的同一波长上,即波长是连续的;有波长变换则是将一根输入光纤上的某一波长信号连到另一根输出光纤 的另一波长上。适当地安排路由和分配波长,可为电设备间建立光路(opticalpath)。在一根光纤上,不能为不同光路分配相同波长。图2(a)为图1建立的光路例子。将图2(a)的光路连接用图2(b)来表示,称为逻辑结构,也称逻辑拓扑或虚拓扑。例如,图2(a)中,节点B与E间的光路是经节点A中的OXC转接的,在图2(b)中用O4表示。图2(b)中,O6、O4、O1都是中间有OXC转接的。O2、O3、O5是直接光路。 这样建立的光路对信号是透明的,即信号可以是任意方式。 实际设计中,一种需求情况是:提出所需建立的光路,为这种光路选取物理路由并分配相应的波长[1,2]。例如,图2(b)中提出要建立6条光路,图2(a)就是一种选路和波长分配方案。 网络向分组化发展,图1中的电设备可以是ATM交换机或IP路由器。例如,连在端口B2的路由器可以通过光路O6和连在端口C3的路由器相连。B2到C3可有多条路径,O6是最近的,也可以经过O4―O5―O3或O4―O5―O1―O2连接,但需要路由器转接,即电的多跳连接。A与B间
安康学院 学年论文(设计) 题目_____________________________________________ 学生姓名_______________ 学号_____________________________ 所在院(系)_______________________________________ 专业班级__________________________________________________ 指导教师_____________________________________________ 年月曰
基于粒子群优化算法的图像分割 (作者:) () 指导教师: 【摘要】本文通过对粒子群优化算法的研究,采用Java编程,设计出一套用于图像分割的系统。 基于粒子群优化算法的图像分割系统,可以将一幅给定的图像进行分割,然后将分割结果保存。图像分割的目的是将感兴趣的区域从图像中分割出来,从而为计算机视觉的后续处理提供依据。图像分割的方法有多种,阈值法因其实现简单而成为一种有效的图像分割方法。而粒子群优化(PSO)算法是一类随机全局优化技术,它通过粒子间的相互作用发现复杂搜索空间中的最优区域缩短寻找阈值的时间。因此,基于粒子群优化算法的图像分割以粒子群优化算法为寻优工具,建立具有自适应和鲁棒性的分割方法。从而可以在最短的时间内,准确地确定分割阈值。 关键词:粒子群优化(PSO,图像分割,阈值法,鲁棒性 Abstract T his paper based on the particle swarm optimizati on algorithm, desig ns a set of system for image segme ntati on using Java program min g. Image segme ntati on system based on particle swarm optimizati on algorithm, the image can be a given segmentation, and then the segmentation results would be saved. Image segmentation is the purpose of the interested area from the image, thus providing the basis for the subsequent processing of computer vision. There are many methods of image segmentation, threshold method since its simple realization, becomes a kind of effective method in image segmentation. Particle swarm optimization (PSO) algorithm is a stochastic global optimization technique; it finds optimal regions of complex search spaces for threshold time shorte ned through the in teractio n betwee n particles. Therefore, particle swarm optimization algorithm of image segmentation based on particle swarm optimization algorithm based on optimizati on tools; establish segme ntati on method with adaptive and robust. Therefore, it is possible for us in the shortest possible time to accurately determ ine the segme ntati on threshold. Key word s: PSO, image segmentation, threshold method, robust. 1引言 1.1研究的背景和意义 技术的不断向前发展,人们越来越多地利用计算机来获取和处理视觉图像信息。据统计,人类
基本粒子群算法的原理和matlab程序 作者——niewei120(nuaa) 一、粒子群算法的基本原理 粒子群优化算法源自对鸟群捕食行为的研究,最初由Kennedy和Eberhart提出,是一种通用的启发式搜索技术。一群鸟在区域中随机搜索食物,所有鸟知道自己当前位置离食物多远,那么搜索的最简单有效的策略就是搜寻目前离食物最近的鸟的周围区域。PSO 算法利用这种模型得到启示并应用于解决优化问题。PSO 算法中,每个优化问题的解都是粒子在搜索 空间中的位置,所有的粒子都有一个被优化的目标函数所决定的适应值,粒子还有一个速度值决定它们飞翔的方向和距离,然后粒子群就追随当前的最优粒子在解空间中搜索。 PSO 算法首先在给定的解空间中随机初始化粒子群,待优化问题的变量数决定了解空间的维数。每个粒子有了初始位置与初始速度。然后通过迭代寻优。在每一次迭代中,每个粒子通过跟踪两个“极值”来更新自己在解空间中的空间位置与飞翔速度。第一个极值就是单个粒子本身在迭代过程中找到的最优解粒子,这个粒子叫做个体极值。另一个极值是种群所有粒子在迭代过程中所找到的最优解粒子,这个粒子是全局极值。上述的方法叫全局粒子群算法。如果不用种群所有粒子而只用其中一部分作为该粒子的邻居粒子,那么在所有邻居粒子中的极值就是局部极值,该方法称为局部PSO 算法。 速度、位置的更新方程表示为: 每个粒子自身搜索到的历史最优值p i ,p i=(p i1,p i2,....,p iQ),i=1,2,3,....,n。所有粒子搜索到的最优值p g,p g=(p g1,p g2,....,p gQ),注意这里的p g只有一个。 是保持原来速度的系数,所以叫做惯性权重。 是粒子跟踪自己历史最优值的权重系数,它表示粒子自身的认识,所以叫“认知”。通常设置为2。 是粒子跟踪群体最优值的权重系数,它表示粒子对整个群体知识的认识,所以叫做“社会知识”,经常叫做“社会”。通常设置为2。 是[0,1]区间内均匀分布的随机数。 是对位置更新的时候,在速度前面加的一个系数,这个系数我们叫做约束因子。通常设 置为1 。
粒子群优化算法(1)—粒子群优化算法简介 PSO算法就是模拟一群鸟寻找食物的过程,每个鸟就是PSO中的粒子,也就是我们需要求解问题的可能解,这些鸟在寻找食物的过程中,不停改变自己在空中飞行的位置与速度。大家也可以观察一下,鸟群在寻找食物的过程中,开始鸟群比较分散,逐渐这些鸟就会聚成一群,这个群忽高忽低、忽左忽右,直到最后找到食物。这个过程我们转化为一个数学问题。寻找函数y=1-cos(3*x)*exp(-x)的在[0,4]最大值。该函数的图形如下: 当x=0.9350-0.9450,达到最大值y=1.3706。为了得到该函数的最大值,我们在[0, 4]之间随机的洒一些点,为了演示,我们放置两个点,并且计算这两个点的函数值,同时给这两个点设置在[0, 4]之间的一个速度。下面这些点就会按照一定的公式更改自己的位置,到达新位置后,再计算这两个点的值,然后再按照一定的公式更新自己的位置。直到最后在y=1.3706这个点停止自己的更新。这个过程与粒子群算法作为对照如下: 这两个点就是粒子群算法中的粒子。 该函数的最大值就是鸟群中的食物。 计算两个点函数值就是粒子群算法中的适应值,计算用的函数就是粒子群算法中的适应度函数。 更新自己位置的公式就是粒子群算法中的位置速度更新公式。 下面演示一下这个算法运行一次的大概过程: 第一次初始化 第一次更新位置
第二次更新位置 第21次更新 最后的结果(30次迭代) 最后所有的点都集中在最大值的地方。
粒子群优化算法(2)—标准粒子群优化算法 在上一节的叙述中,唯一没有给大家介绍的就是函数的这些随机的点(粒子)是如何运动的,只是说按照一定的公式更新。这个公式就是粒子群算法中的位置速度更新公式。下面就介绍这个公式是什么。在上一节中我们求取函数y=1-cos(3*x)*exp(-x)的在[0, 4]最大值。并在[0,4]之间放置了两个随机的点,这些点的坐标假设为x1=1.5,x2=2.5;这里的点是一个标量,但是我们经常遇到的问题可能是更一般的情况—x 为一个矢量的情况,比如二维z=2*x1+3*x22的情况。这个时候我们的每个粒子均为二维,记粒子P1=(x11,x12),P2=(x21,x22),P3=(x31,x32),......Pn=(xn1,xn2)。这里n 为粒子群群体的规模,也就是这个群中粒子的个数,每个粒子的维数为2。更一般的是粒子的维数为q ,这样在这个种群中有n 个粒子,每个粒子为q 维。 由n 个粒子组成的群体对Q 维(就是每个粒子的维数)空间进行搜索。每个粒子表示为:x i =(x i1,x i2,x i3,...,x iQ ),每个粒子对应的速度可以表示为v i =(v i1,v i2,v i3,....,v iQ ),每个粒子在搜索时要考虑两个因素: 1. 自己搜索到的历史最优值 p i ,p i =(p i1,p i2,....,p iQ ),i=1,2,3,....,n ; 2. 全部粒子搜索到的最优值p g ,p g =(p g1,p g2,....,p gQ ),注意这里的p g 只有一个。 下面给出粒子群算法的位置速度更新公式: 112()()()()k k k k i i i i v v c rand pbest x c rand gbest x ω+=+??-+??-, 11k k k i i i x x av ++=+. 这里有几个重要的参数需要大家记忆,因为在以后的讲解中将会经常用到,它们是: ω是保持原来速度的系数,所以叫做惯性权重。1c 是粒子跟踪自己历史最优值的权重系数,它表示粒子自身的认识,所以叫“认知”。通常设置为2。2c 是粒子跟踪群体最优值的权重系数,它表示粒子对整个群体知识的认识,所以叫做“社会知识”,经常叫做“社会”。通常设置为2。()rand 是[0,1]区间内均匀分布的随机数。a 是对位置更新的时候,在速度前面加的一个系数,这个系数我们叫做约束因子。通常设置为1。这样一个标准的粒子群算法就介绍结束了。下图是对整个基本的粒子群的过程给一个简单的图形表示。 判断终止条件可是设置适应值到达一定的数值或者循环一定的次数。 注意:这里的粒子是同时跟踪自己的历史最优值与全局(群体)最优值来改变自己的位置预速度的,所以又叫做全局版本的标准粒子群优化算法。
对于函数f=x*sin(x)*cos(2*x)-2*x*sin(3*x),求其在区间[0,20]上该函数的最大值。 ?初始化种群 已知位置限制[0,20],由于一维问题较为简单,因此可以取初始种群N 为50,迭代次数为100,当然空间维数d 也就是1。 位置和速度的初始化即在位置和速度限制内随机生成一个N×d 的矩阵,对于此题,位置初始化也就是在0~20内随机生成一个50×1的数据矩阵,而对于速度则不用考虑约束,一般直接在0~1内随机生成一个50×1的数据矩阵。 此处的位置约束也可以理解为位置限制,而速度限制是保证粒子步长不超限制的,一般设置速度限制为[-1,1]。 粒子群的另一个特点就是记录每个个体的历史最优和种群的历史最优,因此而二者对应的最优位置和最优值也需要初始化。其中每个个体的历史最优位置可以先初始化为当前位置,而种群的历史最优位置则可初始化为原点。对于最优值,如果求最大值则初始化为负无穷,相反地初始化为正无穷。 每次搜寻都需要将当前的适应度和最优解同历史的记录值进行对比,如果超过历史最优值,则更新个体和种群的历史最优位置和最优解。 ?速度与位置的更新
速度和位置更新是粒子群算法的核心,其原理表达式和更新方式如下: 每次更新完速度和位置都需要考虑速度和位置的限制,需要将其限制在规定范围内,此处仅举出一个常规方法,即将超约束的数据约束到边界(当位置或者速度超出初始化限制时,将其拉回靠近的边界处)。当然,你不用担心他会停住不动,因为每个粒子还有惯性和其他两个参数的影响。 代码如下: clc;clear;close all; %% 初始化种群 f= @(x)x .* sin(x) .* cos(2 * x) - 2 * x .* sin(3 * x); % 函数表达式figure(1);ezplot(f,[0,0.01,20]); N = 50; % 初始种群个数 d = 1; % 空间维数 ger = 100; % 最大迭代次数 limit = [0, 20]; % 设置位置参数限制 vlimit = [-1, 1]; % 设置速度限制 w = 0.8; % 惯性权重 c1 = 0.5; % 自我学习因子 c2 = 0.5; % 群体学习因子 for i = 1:d
基本粒子群算法的原理和matlab 程序 作者—— niewei120 (nuaa) 一、粒子群算法的基本原理 粒子群优化算法源自对鸟群捕食行为的研究,最初由Kennedy 和 Eberhart 提出,是一种通 用的启发式搜索技术。一群鸟在区域中随机搜索食物,所有鸟知道自己当前位置离食物多远, 那么搜索的最简单有效的策略就是搜寻目前离食物最近的鸟的周围区域。PSO 算法利用这种模型得到启示并应用于解决优化问题。PSO 算法中,每个优化问题的解都是粒子在搜索 空间中的位置,所有的粒子都有一个被优化的目标函数所决定的适应值,粒子还有一个速度值决定它们飞翔的方向和距离,然后粒子群就追随当前的最优粒子在解空间中搜索。 PSO 算法首先在给定的解空间中随机初始化粒子群,待优化问题的变量数决定了解空间的维数。每个粒子有了初始位置与初始速度。然后通过迭代寻优。在每一次迭代中,每个粒子通过跟踪两个“极值”来更新自己在解空间中的空间位置与飞翔速度。第一个极值就是单个粒子本身在迭代过程中找到的最优解粒子,这个粒子叫做个体极值。另一个极值是种群所有粒子在迭代过程中所找到的最优解粒子,这个粒子是全局极值。上述的方法叫全局粒子群算法。如果不用种群所有粒子而只用其中一部分作为该粒子的邻居粒子,那么在所有邻居粒子中的极值就是局部极值,该方法称为局部PSO 算法。 速度、位置的更新方程表示为: 每个粒子自身搜索到的历史最优值p i,p i=(p i1 ,p i2 ,....,p iQ ), i=1,2,3,....,n 。所有粒子搜索到的最优值p g, p g=(p g1 ,p g2,....,p gQ ),注意这里的p g只有一个。 是保持原来速度的系数,所以叫做惯性权重。 是粒子跟踪自己历史最优值的权重系数,它表示粒子自身的认识,所以叫“认知”。通常设置为 2 。 是粒子跟踪群体最优值的权重系数,它表示粒子对整个群体知识的认识,所以叫做“社会知识”,经常叫做“社会”。通常设置为2。 是[0,1] 区间内均匀分布的随机数。 是对位置更新的时候,在速度前面加的一个系数,这个系数我们叫做约束因子。通常设 置为 1 。
每种颜色的光与波长的对应值 紫光 400~450 nm 蓝光 450~480 nm 青光 480~490 nm 蓝光绿 490~500 nm 绿光 500~560 nm 黄光绿 560~580 nm 黄光 580~595 nm 橙光 595~605 nm 红光 605~700 nm
根据光子能量公式:E=hυ 其中,h为普朗克常数,υ为光子频率 可见光的性质是由其频率决定的。 另外,在不同折射率的介质中,光的波长会改变而频率不变。
色温 色温(colo(u)r temperature)是表示光源光色的尺度,单位为K(开尔文)。色温在摄影、录象、出版等领域具有重要应用。光源的色温是通过对比它的色彩和理论的热黑体辐射体来确定的。热黑体辐射体与光源的色彩相匹配时的开尔文温度就是那个光源的色温,它直接和普朗克黑体辐射定律相联系。 一.概述 基本定义 色温是表示光源光谱质量最通用的指标。一般用Tc表示。色温是按绝对黑体来定义的,光源的辐射在可见区和绝对黑体的辐射完全相同时,此时黑体的温度就称此光源的色温。低色温光源的特征是能量分布中,红辐射相对说要多些,通常称为“暖光”;色温提高后,能量
分布中,蓝辐射的比例增加,通常称为“冷光”。一些常用光源的色温为:标准烛光为1930K (开尔文温度单位);钨丝灯为2760-2900K;荧光灯为3000K;闪光灯为3800K;中午阳光为5600K;电子闪光灯为6000K;蓝天为12000-18000K。 显示器指标 色温(ColorTemperature)是高档显示器一个性能指标。我们知道,光源发光时会产生一组光谱,用一个纯黑体产生出同样的光谱时所需要达到的某一温度,这个温度就是该光源的色温。15英寸以上数控显示器肯定带有色温调节功能,通过该功能(一般有9300K、6500K、5000K三个选择)可以使显示器的色彩能够满足高标准工作要求。高档产品中有些还支持色温线性调整功能。 光源颜色 光源的颜色常用色温这一概念来表示。光源发射光的颜色与黑体在某一温度下辐射光色相同时,黑体的温度称为该光源的色温。在黑体辐射中,随着温度不同,光的颜色各不相同,黑体呈现由红——橙红——黄——黄白——白——蓝白的渐变过程。某个光源所发射的光的颜色,看起来与黑体在某一个温度下所发射的光颜色相同时,黑体的这个温度称为该光源的色温。“黑体”的温度越高,光谱中蓝色的成份则越多,而红色的成份则越少。例如,白炽灯的光色是暖白色,其色温表示为2700K,而日光色荧光灯的色温表示方法则是6000K。 某些放电光源,它发射光的颜色与黑体在各种温度下所发射的光颜色都不完全相同。所以在这种情况下用“相关色温”的概念。光源所发射的光的颜色与黑体在某一温度下发射的光的颜色最接近时,黑体的温度就称为该光源的相关色温。
4.1粒子群算法基本原理 粒子群优化算法[45]最原始的工作可以追溯到1987年Reynolds 对鸟群社会系统Boids (Reynolds 对其仿真鸟群系统的命名)的仿真研究 。通常,群体的行为可以由几条简单的规则进行建模,虽然每个个体具有简单的行为规则,但是却群体的行为却是非常的复杂,所以他们在鸟类仿真中,即Boids 系统中采取了下面的三条简单的规则: (1)飞离最近的个体(鸟),避免与其发生碰撞冲突; (2)尽量使自己与周围的鸟保持速度一致; (3)尽量试图向自己认为的群体中心靠近。 虽然只有三条规则,但Boids 系统已经表现出非常逼真的群体聚集行为。但Reynolds 仅仅实现了该仿真,并无实用价值。 1995年Kennedy [46-48]和Eberhart 在Reynolds 等人的研究基础上创造性地提出了粒子群优化算法,应用于连续空间的优化计算中 。Kennedy 和Eberhart 在boids 中加入了一个特定点,定义为食物,每只鸟根据周围鸟的觅食行为来搜寻食物。Kennedy 和Eberhart 的初衷是希望模拟研究鸟群觅食行为,但试验结果却显示这个仿真模型蕴含着很强的优化能力,尤其是在多维空间中的寻优。最初仿真的时候,每只鸟在计算机屏幕上显示为一个点,而“点”在数学领域具有多种意义,于是作者用“粒子(particle )”来称呼每个个体,这样就产生了基本的粒子群优化算法[49]。 假设在一个D 维搜索空间中,有m 个粒子组成一粒子群,其中第i 个粒子的空间位置为123(,,,...,)1,2,...,i i i i iD X x x x x i m ==,它是优化问题的一个潜在解,将它带入优化目标函数可以计算出其相应的适应值,根据适应值可衡量i x 的优劣;第i 个粒子所经历的最好位置称为其个体历史最好位置,记为123(,,,...,)1,2,...,i i i i iD P p p p p i m ==,相应的适应值为个体最好适应值 Fi ;同时,每个粒子还具有各自的飞行速度123(,,,...,)1,2,...,i i i i iD V v v v v i m ==。所有粒子经历过的位置中的最好位置称为全局历史最好位置,记为
粒子群算法(1)----粒子群算法简介 一、粒子群算法的历史 粒子群算法源于复杂适应系统(Complex Adaptive System,CAS)。CAS理论于1994年正式提出,CAS中的成员称为主体。比如研究鸟群系统,每个鸟在这个系统中就称为主体。主体有适应性,它能够与环境及其他的主体进行交流,并且根据交流的过程“学习”或“积累经验”改变自身结构与行为。整个系统的演变或进化包括:新层次的产生(小鸟的出生);分化和多样性的出现(鸟群中的鸟分成许多小的群);新的主题的出现(鸟寻找食物过程中,不断发现新的食物)。 所以CAS系统中的主体具有4个基本特点(这些特点是粒子群算法发展变化的依据): 首先,主体是主动的、活动的。 主体与环境及其他主体是相互影响、相互作用的,这种影响是系统发展变化的主要动力。 环境的影响是宏观的,主体之间的影响是微观的,宏观与微观要有机结合。 最后,整个系统可能还要受一些随机因素的影响。 粒子群算法就是对一个CAS系统---鸟群社会系统的研究得出的。 粒子群算法(Particle Swarm Optimization, PSO)最早是由Eberhart和Kennedy于1995年提出,它的基本概念源于对鸟群觅食行为的研究。设想这样一个场景:一群鸟在随机搜寻食物,在这个区域里只有一块食物,所有的鸟都不知道食物在哪里,但是它们知道当前的位置离食物还有多远。那么找到食物的最优策略是什么呢?最简单有效的就是搜寻目前离食物最近的鸟的周围区域。 PSO算法就从这种生物种群行为特性中得到启发并用于求解优化问题。在PSO中,每个优化问题的潜在解都可以想象成d维搜索空间上的一个点,我们称之为“粒子”(Particle),所有的粒子都有一个被目标函数决定的适应值(Fitness Value ),每个粒子还有一个速度决定他们飞翔的方向和距离,然后粒子们就追随当前的最优粒子在解空间中搜索。Reynolds对鸟群飞行的研究发现。鸟仅仅是追踪它有限数量的邻居但最终的整体结果是整个鸟群好像在一个中心的控制之下.即复杂的全局行为是由简单规则的相互作用引起的。 二、粒子群算法的具体表述 上面罗嗦了半天,那些都是科研工作者写论文的语气,不过,PSO的历史就像上面说的那样。下面通俗的解释PSO算法。 PSO算法就是模拟一群鸟寻找食物的过程,每个鸟就是PSO中的粒子,也就是我们需要求解问题的可能解,这些鸟在寻找食物的过程中,不停改变自己在空中飞行的位置与速度。大家也可以观察一下,鸟群在寻找食物的过程中,开始鸟群比较分散,逐渐这些鸟就会聚成一群,这个群忽高忽低、忽左忽右,直到最后找到食物。这个过程我们转化为一个数学问题。寻找函数y=1-cos(3*x)*exp(-x)的在[0,4]最大值。该函数的图形如下:
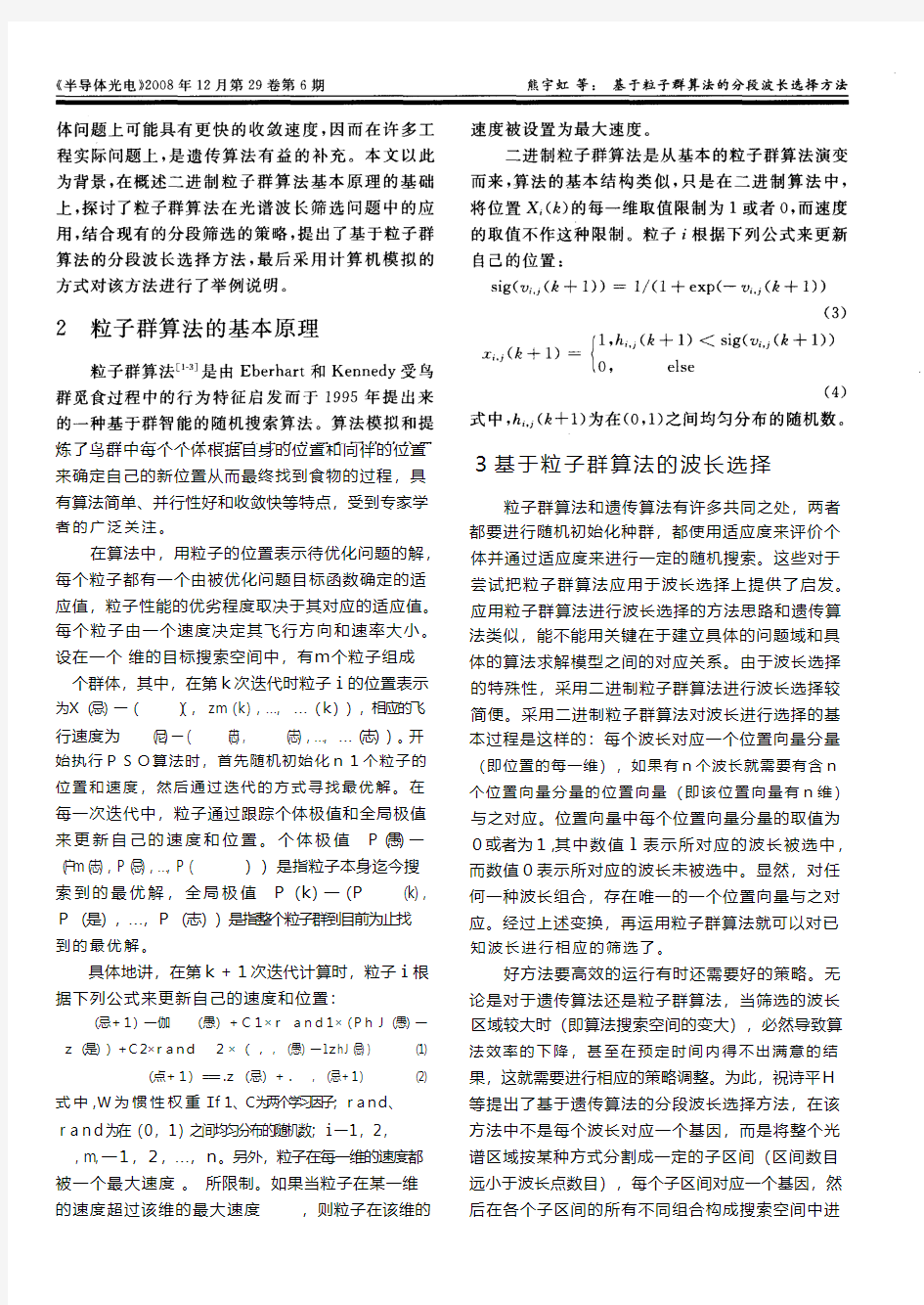
波长分配方法 随着波分复用技术的应用,几个光信号可在单根光纤传输。这种技术可以更有效的利用光纤的巨大力量,但也带来了新的网络设计和管理问题,尤其是当波长转换节点中没有可能的。考虑在这样的网络中的路由和波长分配问题,一旦路线是固定的波长分配基本上是一个图着色问题。对于一个给定的图着色算法,在当前的研究中较主流的有贪婪算法,穷举搜索,模拟退火以及遗传算法。都是相当不错的路由和波长分配性能,本文主要介绍在路由选择确定的情况下的波长分配问题,且着重从贪婪算法和穷举搜索算法来讲述波长分配方法。 在本文中,我们集中在WDM网络路由和波长分配问题。当多个信号共享相同的纤维,他们必须使用不同的波长。现有的技术设置了一个上限的波长数。因此,我们认为,导致建立一个给定的连接在与最低数量的波长网络设置的问题。在制定的最优化问题,取决于是否有可能在波长转换节点或没有。如果波长转换的最佳解决方案是可能的只是最大限度地减少了使用的通道的链接的最大数量。路由问题是在正常的电路交换网络,在唯一的限制因素是对每一个环节通道数相同。 另一方面,如果波长转换不能在节点完成后,这便产生了优化问题新的约束。每个连接使用上沿线的各个环节相同的波长。一个可行的解决方案使用小于或等于各个环节的波长数比有可用的,没有两个连接共享一个共同的联系具有相同的波长。 也可以使用波长转换网络。在本文中不讨论这种网络,因此,我们假定波长转换不能在任何节点完成。我们还假设没有任何的网络动态重构的需要,即连接设置是静态的。 路由和波长分配问题是紧密联系在一起。我们首先要确定每个连接的线路(即路由),然后尝试使用最小数量的波长来进行波长分配。这样做,这样反复的进行着色尝试目的在于对路由连接不改变的同时使用最少的颜色来完成全图的着色。同时,在实践中以求找到比现有技术使用更加少颜色的着色方案。 在路由和波长分配过程是代表在图1。在左边是一个物理网络。中间的是固定路由波长分配图,右侧的图是图着色方案,其中的节点表示连接,按来源目的地对应表示,和邻居节点的连接(表示之间存在共享),如果且仅当相应的连接有着一些共同的联系。为了避免在网络图波长的冲突,邻居节点总是有不同的颜色。 图 1 实例网络以及波长分配过程 两个节点之间的最短路径可以通过使用如Dijkstra算法或Floyd算法。这两种算法具有相同的复杂度为O,如果每个节点对之间的路径进行搜索。在实践中,Floyd算法通常会好一点,由于常系数较小。
粒子群算法(1)----粒子群算法简介 二、粒子群算法的具体表述 上面罗嗦了半天,那些都是科研工作者写论文的语气,不过,PSO的历史就像上面说的那样。下面通俗的解释PSO算法。 PSO算法就是模拟一群鸟寻找食物的过程,每个鸟就是PSO.中的粒子,也就是我们需要求解问题的可能解,这些鸟在寻找食物的过程中,不停改变自己在空中飞行的位置与速度。大家也可以观察一下,鸟群在寻找食物的过程中,开始鸟群比较分散,逐渐这些鸟就会聚成一群,这个群忽高忽低、忽左忽右,直到最后找到食物。这个过程我们转化为一个数学问题。寻找函数y=1-cos(3*x)*exp(-x)的在[0,4]最大值。该函数的图形如下: 当x=0.9350-0.9450,达到最大值y=1.3706。为了得到该函数的最大值,我们在[0,4]之间随机的洒一些点,为了演示,我们放置两个点,并且计算这两个点的函数值,同时给这两个点设置在[0,4]之间的一个速度。下面这些点就会按照一定的公式更改自己的位置,到达新位置后,再计算这两个点的值,然后再按照一定的公式更新自己的位置。直到最后在y=1.3706这个点停止自己的更新。这个过程与粒子群算法作为对照如下: 这两个点就是粒子群算法中的粒子。 该函数的最大值就是鸟群中的食物 计算两个点函数值就是粒子群算法中的适应值,计算用的函数就是粒子群算法中的适应度函数。 更新自己位置的一定公式就是粒子群算法中的位置速度更新公式。 下面演示一下这个算法运行一次的大概过程: 第一次初始化
第一次更新位置 第二次更新位置
第21次更新 最后的结果(30次迭代) 最后所有的点都集中在最大值的地方。
基于粒子群优化算法的神经网络在农药定量构效关系建模中的应用 张丽平 俞欢军3 陈德钊 胡上序 (浙江大学化工系,杭州310027) 摘 要 神经网络模型能有效模拟非线性输入输出关系,但其常规训练算法为BP 或其它梯度算法,导致训练时间较长且易陷入局部极小点。本实验探讨用粒子群优化算法训练神经网络,并应用到苯乙酰胺类农药的定量构效关系建模中,对未知化合物的活性进行预测来指导新药的设计和合成。仿真结果表明,粒子群优化算法训练的神经网络不仅收敛速度明显加快,而且其预报精度也得到了较大的提高。关键词 粒子群优化算法,神经网络,定量构效关系 2004201204收稿;2004207225接受 本文系国家自然科学基金资助项目(N o.20276063) 1 引 言 药物定量构效关系(QS AR )是研究药物生理活性和药物分子结构参数间的量变规律并建立相应的 数学模型,进而研究药物的作用机理,从而用于预测未知化合物的生物活性,探讨药物的作用机理,指导新药的设计和合成,在药物和农药的研究与设计中已经显示出广阔的应用前景1。以往QS AR 的建模方法大多基于统计原理,局限于线性模型,只进行简单的非线性处理,由此所建立的模型很难契合实际构效关系,并且其处理过程都比较繁琐2。神经网络通过学习将构效关系知识隐式分布在网络之中,适用于高度非线性体系。 在药物QS AR 中采用神经网络(NN )始于20世纪80年代末3,此后得到迅速的发展,目前已发展为除多重线性回归和多元数据分析之外的第3种方法4。通常多层前传网络采用BP 算法,通过误差反传,按梯度下降的方向调整权值。其缺点是可能陷入局部极小点,且对高维输入收敛速度非常缓慢。 粒子群优化算法(particle swarm optimization ,PS O )是K ennedy 等5源于对鸟群、鱼群和人类社会行为的研究而发展的一种新的进化型寻优技术。PS O 已成为进化寻优算法研究的热点,其最主要特点是简单、收敛速度快,且所需领域知识少。本实验拟将该方法初始化前传神经网络为苯乙酰胺类农药建立良好适用的QS AR 模型。 2 苯乙酰胺类农药的Q SAR 问题 苯乙酰胺类化合物是除草农药,其除草活性与其分子结构密切相关。所有的N 2(12甲基212苯乙基)苯乙酰胺都可用相应的羧酸酰胺通过霍夫曼反应生成。N 2(12甲基212苯乙基)苯乙酰胺的基本结构式为 : 其中X 为Me 、F 、Cl 、OMe 、CF 3和Br 等,Y 为Me 、Cl 、F 和Br 等,由不同的X 和Y 取代基可构成不同的化合物。常用以下7个理化参数描述化合物的分子组成和结构:log P 、log 2P (疏水性参数及其平方项)、 σ(电性效应参数)、E s (T aft 立体参数)、MR (摩尔折射度),1χ、2 χ(分子连接性指数)。于是这类化合物的QS AR 就转化为上述理化参数与除草活性间的关系。为研究这种关系,选用具有代表性的50个化合物, 他们的活性值取自文献1,见表1。 第32卷2004年12月分析化学(FE NXI H UAX UE ) 研究报告Chinese Journal of Analytical Chemistry 第12期1590~1594
摘要 在智能领域,大部分问题都可以归结为优化问题。常用的经典优化算法都对问题有一定的约束条件,如要求优化函数可微等,仿生算法是一种模拟生物智能行为的优化算法,由于其几乎不存在对问题的约束,因此,粒子群优化算法在各种优化问题中得到广泛应用。 本文首先描述了基本粒子群优化算法及其改进算法的基本原理,对比分析粒子群优化算法与其他优化算法的优缺点,并对基本粒子群优化算法参数进行了简要分析。根据分析结果,研究了一种基于量子的粒子群优化算法。在标准测试函数的优化上粒子群优化算法与改进算法进行了比较,实验结果表明改进的算法在优化性能明显要优于其它算法。本文算法应用于支持向量机参数选择的优化问题上也获得了较好的性能。最后,对本文进行了简单的总结和展望。 关键词:粒子群优化算法最小二乘支持向量机参数优化适应度
目录 摘要...................................................................... I 目录....................................................................... II 1.概述. (1) 1.1引言 (1) 1.2研究背景 (1) 1.2.1人工生命计算 (1) 1.2.2 群集智能理论 (2) 1.3算法比较 (2) 1.3.1粒子群算法与遗传算法(GA)比较 (2) 1.3.2粒子群算法与蚁群算法(ACO)比较 (3) 1.4粒子群优化算法的研究现状 (4) 1.4.1理论研究现状 (4) 1.4.2应用研究现状 (5) 1.5粒子群优化算法的应用 (5) 1.5.1神经网络训练 (6) 1.5.2函数优化 (6) 1.5.3其他应用 (6) 1.5.4粒子群优化算法的工程应用概述 (6) 2.粒子群优化算法 (8) 2.1基本粒子群优化算法 (8) 2.1.1基本理论 (8) 2.1.2算法流程 (9) 2.2标准粒子群优化算法 (10) 2.2.1惯性权重 (10) 2.2.2压缩因子 (11) 2.3算法分析 (12) 2.3.1参数分析 (12) 2.3.2粒子群优化算法的特点 (14) 3.粒子群优化算法的改进 (15) 3.1粒子群优化算法存在的问题 (15) 3.2粒子群优化算法的改进分析 (15) 3.3基于量子粒子群优化(QPSO)算法 (17) 3.3.1 QPSO算法的优点 (17) 3.3.2 基于MATLAB的仿真 (18) 3.4 PSO仿真 (19) 3.4.1 标准测试函数 (19) 3.4.2 试验参数设置 (20) 3.5试验结果与分析 (21) 4.粒子群优化算法在支持向量机的参数优化中的应用 (22) 4.1支持向量机 (22) 4.2最小二乘支持向量机原理 (22)
粒子群算法论文 SANY标准化小组 #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN#
粒子群算法的寻优算法 摘要:粒子群算法是在仿真生物群体社会活动的基础上,通过模拟群体生物相互协同寻优能力,从而构造出一种新的智能优化算法。这篇文章简要回顾了粒子群算法的发展历史;引入了一个粒子群算法的实例,对其用MATLAB进行编程求解,得出结论。之后还对其中的惯性权重进行了延伸研究,对惯性权重的选择和变化的算法性能进行分析。 关键词:粒子群、寻优、MATLAB、惯性权重 目录:
1.粒子群算法的简介 粒子群算法(Particle Swarm Optimization)是一种新的智能优化算法。谈到它的发展历史,就不得不先介绍下传统的优化算法,正因为传统优化算法自身的一些不足,才有新智能优化算法的兴起,而粒子群算法(PSO)就是在这种情况下发展起来的。 粒子群算法的研究背景 最优化是人们在科学研究、工程技术和经济管理等领域中经常遇到的问题。优化问题研究的主要内容是在解决某个问题时,如何从众多的解决方案中选出最优方案。它可以定义为:在一定的约束条件下,求得一组参数值,使得系统的某项性能指标达到最优(最大或最小)。传统的优化方法是借助于优化问题的不同性质,通常将问题分为线性规划问题、非线性规划问题、整数规划问题和多目标规划问题等。相应的有一些成熟的常规算法,如应用于线性规划问题的单纯形法,应用于非线性规划的牛顿法、共扼梯度法,应用于整数规则的分枝界定法、动态规划等。列举的这些传统的优化算法能够解决现实生活和工程上的很多问题,但工业和科学领域大量实际问题的困难程度正在日益增长,它们大多是根本无法在可接受的时间内找到解的问题。这类优化问题的困难性不仅体现在具有极大的规模,更为重要的是,它们多数是非线性的、动态的、多峰的、具有欺骗性的或者不具有任何导数信息。因此,发展通用性更强、效率更高的优化算法总是需要的。 起源 在自然界中,鸟群运动的主体是离散的,其排列看起来是随机的,但在整体的运动中它们却保持着惊人的同步性,其整体运动形态非常流畅且极富美感。这些呈分布状态的群体所表现出的似乎是有意识的集中控制,一直是许多研究者感兴趣的问题。有研究者对鸟群的运动进行了计算机仿真,他们通过对个体设定简单的运动规则,来模拟鸟群整体的复杂行为。 1986 年 Craig ReynolS 提出了 Boid 模型,用以模拟鸟类聚集飞行的行为,通过对现实世界中这些群体运动的观察,在计算机中复制和重建这些运动轨迹,并对这些运动进行抽象建模,以发现新的运动模式。之后,生物学家Frank Heppner 在此基础上增加了栖息地对鸟吸引的仿真条件,提出了新的鸟群模型。这个新的鸟群模型的关键在于以个体之间的运算操作为基础,这个操作也就是群体行为的同步必须在于个体努力维持自身与邻居之间的距离为最优,为此每个个体必须知道自身位置和邻居的位置信息。这些都表明群体中个体之间信息的社会共享有助于群体的进化。
粒子群算法原理及其在函数优化中的应用 1粒子群优化(PSO)算法基本原理 1.1标准粒子群算法 假设在一个D 维的目标搜索空间中,有 m 个代表问题潜在解的粒子组成一 个种群x [X i ,X 2,...,X m ],第i 个粒子的信息可用D 维向量表示为 X i [X ii , X i2,..., X iD ]T ,其速度为V i [V ii ,V i2,...,V iD ]T 。算法首先初始化m 个随机粒 子,然后通过迭代找到最优解。每一次迭代中,粒子通过跟踪2个极值进行信息 交流,一个是第i 个粒子本身找到的最优解,称之为个体极值,即 P i [P il , P i2,...,厢]丁 ;另一个是所有粒子目前找到的最优解,称之为群体极值, 即P g [P gi ,P g2,..., P gD 「。粒子在更新上述2个极值后,根据式(1)和式(2)更新自 己的速度和位置。 t 1 t t t t t\ V i WV i C 1「1(P i X i ) C 2「2(P g X i ) 式中,t 代表当前迭代次数,「1,「2是在[0,1]之间服从均匀分布的随机数,C 1,C 2 称为学习因子,分别调节粒子向个体极值和群体极值方向飞行的步长, w 为惯性 权重,一般在0.1~0.9之间取值。在标准的PSO 算法中,惯性权重w 被设为常数, 通常取w 0.5。在实际应用中,x 需保证在一定的范围内,即x 的每一维的变化 范围均为[X min ,X max ],这在函数优化问题中相当丁自变量的定义域 1.2算法实现步骤 步骤1:表示出PSO 算法中的适应度函数fitness(x);(编程时最好以函数的 形式保存,便丁多次调用。) 步骤2:初始化PSO 算法中各个参数(如粒子个数,惯性权重,学习因子, 最大迭代次数等),在自变量x 定义域内随机初始化x ,代入fitness(x)求得适应 度值,通过比较确定起始个体极值P i 和全局极值P g 。 步骤3:通过循环迭代更新x 、p i 和p g : ① 确定惯性权重w 的取值(当w 不是常数时)。 ② 根据式(1)更新粒子的速度V :1,若速度中的某一维超过了 V max ,则取为 V max - ③ 根据式(2)更新自变量x ,若x 的取值超过其定义域,则在其定义域内重新 初t 1 X i t t 1 X i V i
粒子群算法解决函数优化问题 学院:信息科学与工程学院
目录 引言 (1) 一、问题描述 (2) 1.1 连续函数求最优值问题 (2) 1.2 粒子群算法 (2) 二、算法设计 (3) 2.1 流程框图 (3) 2.2 算法实现 (3) 2.3 参数选择 (4) 三、程序设计 (5) 3.1 编写程序 (5) 四、结果与分析 (6) 4.1 实验结果: (6) 4.2 分析: (7) 五、总结 (7)
引言 本文主要利用粒子群算法解决连续函数的最小值问题,粒子群优化是一种新兴的基于群体智能的启发式全局 搜索算法,粒子群优化算法通过粒子间的竞争和协作以实现在复杂搜索空间中寻找全局最优点。它具有易理解、易实现、全局搜索能力强等特点,倍受科学与工程领域的广泛关注,已经成为发展最快的智能优化算法之一。本文介绍了粒子群优化算法的基本原理,分析了其特点,并将其应用于函数优化问题求解。 求函数最优值问题,对此问题,传统的优化技术很容易陷入局部最优解,求得全局优化解的概率不高,可靠性低;为此,建立尽可能大概率的求解全局优化解算法是求解函数优化的一个重要问题。本文采用粒子群算法来解决这类问题。
一、问题描述 1.1 连续函数求最大值问题 本文主要选取一个三维函数,利用matlab 编写粒子群算法程序来求解它们 以验证遗传算法在解决函数优化问题中的有效性。本文选取的函数为:f=x(1).^2+x(2).^2+x(3).^2,求它的最小值。 1.2 粒子群算法 PSO 从这种模型中得到启示并用于解决优化问题。PSO 中,每个优化问题的潜在解都是搜索空间中的一只鸟,称之为粒子。所有的粒子都有一个由被优化的函数决定的适值( fitness value) ,每个粒子还有一个速度决定它们飞翔的方向和距离。然后粒子们就追随当前的最优粒子在解空间中搜索。 PSO 初始化为一群随机粒子(随机解),然后通过迭代找到最优解。在每一次迭代中,粒子通过跟踪两个极值来更新自己;第一个就是粒子本身所找到的最优解,这个解称为个体极值;另一个极值是整个种群目前找到的最优解,这个极值是全局极值。另外也可以不用整个种群而只是用其中一部分作为粒子的邻居,那么在所有邻居中的极值就是局部极值。 假设在一个D 维的目标搜索空间中,有N 个粒子组成一个群落,其中第i 个粒子表示为一个D 维的向量 ) ,,,(21iD i i i x x x X =,N i ,,2,1 =。 第i 个粒子的“飞行 ”速度也是一个D 维的向量,记为 ) ,,21i iD i i v v v V ,(=,3 ,2,1 =i 。 第i 个粒子迄今为止搜索到的最优位置称为个体极值,记为 ) ,,,(21iD i i best p p p p =,N i ,,2,1 =。 整个粒子群迄今为止搜索到的最优位置为全局极值,记为 ) ,,,(21gD g g best p p p g = 在找到这两个最优值时,粒子根据如下的公式(1.1)和( 1.2)来更新自己的速度和位置: ()) (2211id gd id id id id x p r c x p r c v w v -+-+*= (1.1)