散热器结构设计论文
1锂电池热物理模型
时,Li+从负电极脱离,通过隔膜,嵌入正电极;充电酸锂动力锂电池,其单体电池容量为10Ah,最大电压4.2V,长度为66mm,宽度为18mm,高度为120mm,外壳材料为铝,结构模型如图2,图中为了简化电池模型,忽略极耳影响。如图2,在直角坐标系中,按照能量守恒定律,得到单体电池的导热微分方程:锰酸锂电池在正常工作时,副反应可忽
略不计,产生的热量主要由三部分组成:可逆反应热生成速率Q1,电
化学反应热生成速率Q2,焦耳热生成速率Q3。单体锂电池总热生成速
率7为:通过计算得到单体电池在1C、3C、5C放电时的发热量,如图
3所示。t=0时,电池为充满电状态,因为在放电初期,电压下降幅值
较大,电池发热量也快速上升,同时为了保证锂离子电池组的性能和
循环使用寿命,通常将SOC操纵在0.3~0.7。电池在1C、3C放电时,发热量随时间变化不大;5C放电时,电池发热量急剧上升。在实行电
池组仿真分析时,取发热量相对稳定时的数值作为热源,在1C、3C、
5C的发热量分别为10000、53000、115000W/m3。
2液体冷却方式下锂电池组散热器设计及仿真分析
2.1锂电池组散热器设计图4所示为液体冷却散热器,取5个单体电
池为一个电池组,电池组之间的间隔为冷板,材料为铝。为了降低电
池表面中心位置的温度,在冷板中间设计两个对称的液体通道,入口
通道和出口通道的尺寸为142mm×20mm×20mm,冷板的尺寸为
8mm×66mm×120mm,流体通道的直径为6mm,考虑到电池组两端的冷板所汲取的热量较少,设置两端的液体通道直径相比其他的小1mm。
为4.76mm,整个模型的网格数为585248,如图5所示。在计算过程中,把液体流体看作不可压缩的流体,忽略单体电池的热变形。
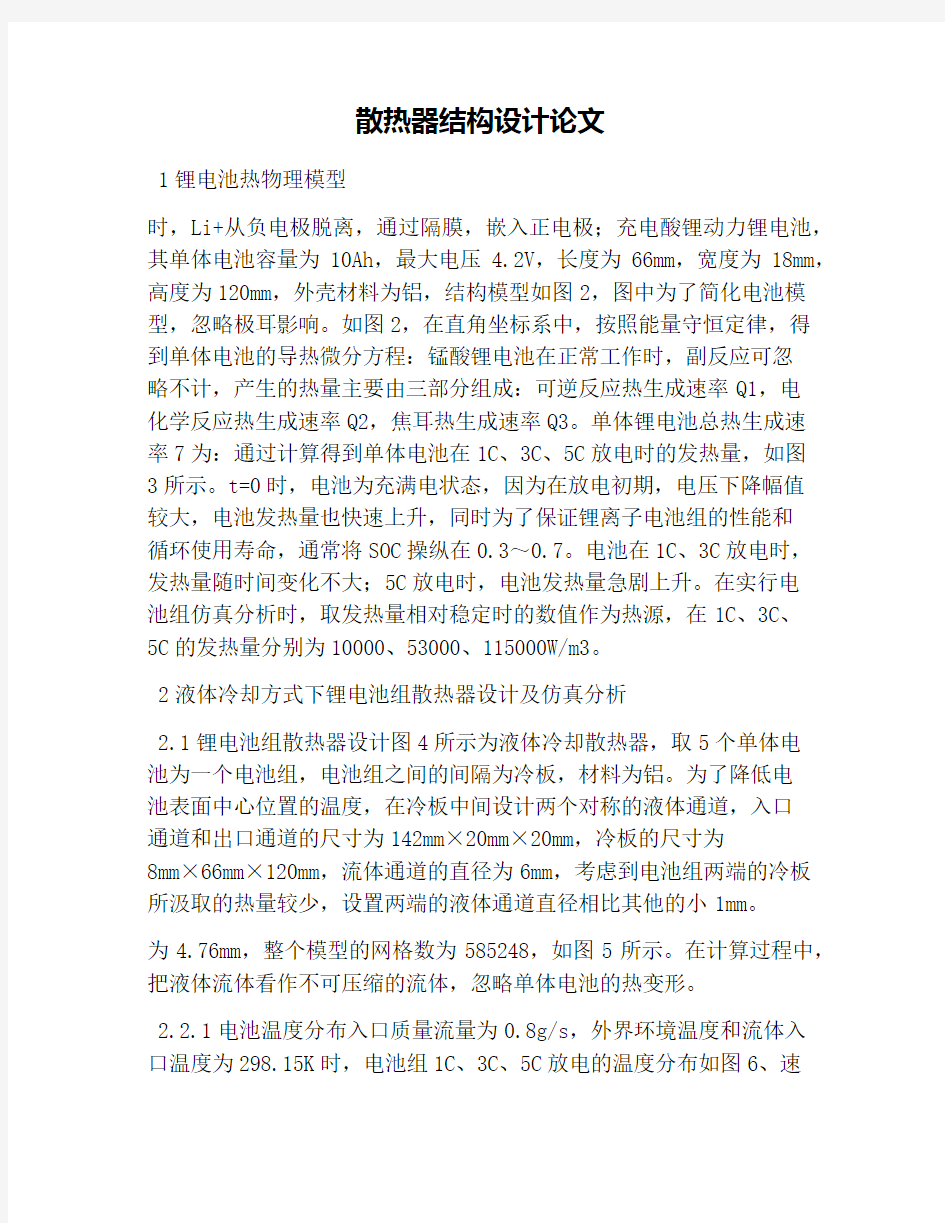
2.2.1电池温度分布入口质量流量为0.8g/s,外界环境温度和流体入
口温度为298.15K时,电池组1C、3C、5C放电的温度分布如图6、速
度分布如图7所示。从图中能够看出液体从通道流入后,经过冷板通道,流体流速增大,带走电池传递给冷板的热量。流体通道内的流速
较为均匀,电池组两端的冷板流速较低,但所汲取的热量较少,所以
单体电池之间温差不大,从温度场分布能够看出单体电池间温度一致
性很好。电池在1C、3C放电时,电池的最高温度分别为300.92、
312.76K,但在5C放电时,电池温度达到了329.78K,内外温差达到了7.12℃,可见放电倍率越大,电池组温度越高。同时还能够看出单体
电池在沿X轴方向的温度梯度大于Y轴和Z轴方向的温度梯度。
2.2.2入口流体温度变化对电池温度的影响入口质量流量为0.8g/s,
外界环境温度为298.15K时,不同流体入口温度所对应的电池组在1C、3C、5C放电的最高温度如图8所示,其中入口温度为298.15~
308.15K。图8显示随着流体入口温度的上升,电池最高温度都相对应
变大,冷却效果越差,在入口流体温度下降1℃时,相对应的电池最高温度降低0.99℃。但入口温度要下降,必定要使换热器的换热性能增强,所以整个散热器的功耗也相对应变大,所以要选择合理的入口温度。
2.2.3流量变化对电池温度的影响不同入口质量流量,外界环境温度
和流体入口温度为298.15K时,电池组在1C、3C、5C放电的最高温度
如图9所示。电池组1C放电时,因为发热量较小,入口流量的变化对
电池组的温度影响不大,曲线趋于水平。电池组3C放电,流量从
0.8g/s到2.0g/s时,电池最高温度下降比较快,大于2.0g/s时,温
度变化缓慢。电池组5C放电,流量小于2.4g/s时,随着流量的增大,温度迅速降低;在大于2.4g/s时,冷却效果不太明显,但曲线的变化
率仍然要比1C、3C时大;在流量从0.8g/s增大到1.2g/s时,1C、3C、5C的最高温度分别下降了1.22、4.45、9.18℃。可见放电倍率越大时,流量的变化对温度的影响越大。所以采纳液体冷却方法,能使电池工
作在最佳的温度范围内,特别是电池在大倍率放电时,通过改变流体
入口流量,能有效操纵电池的温度。从入口处开始对5个单体电池编
号为1、2、3、4、5,表1和表2分别为不同放电倍率及不同入口质量流量条件下单体电池的最高温度和单体电池的内外温差。从表1中能
够看出,在相同放电倍率下,增大入口质量流量能够有效降低电池的
温度,而且各单体电池之间的最高温度总体较为均匀,电池之间最高
温度的温差在1℃以内。电池在5C放电,入口流量为4g/s时,单体电池2的温度最高(307.67K),最低的为单体电池5(307.29K),最大温差0.38K,可见单体电池之间温度一致性较好。从表2能够看出各单体电
池的内外温度差,在小倍率放电时,单体电池间的内外温差很小,随
着放电倍率增大,温差也增大。入口质量流量为0.8g/s,电池组1C放电时,2号电池的内外温差为0.63℃;在3C放电时,2号电池的内外
温差为3.31℃;5C放电时,2号电池的内外温差达到7.22℃,这对电
池性能和寿命有一定的影响,可见放电倍率越大,电池内外温差也越大。同时还显示,随着质量流量的增大,电池组的内外温差有所下降,在5C放电时,能够将最大的温差操纵在5℃以内,但水泵所消耗的能
量也相对应增大,所以能够通过有效的热治理策略来操纵电池的温差,同时泵所消耗的能量最小。若把冷板的材料换成铜,在5C放电、入口
流量为2.4g/s时,单体电池2号的最大温差由5.47℃降到4.65℃,
其电池的温度为311.74K,电池的散热性能有所改善。
3结论
(1)电池在在放电过程中,随着放电倍率的增大,电池的发热量也迅
速增大,在小倍率放电时,发热量变化不大,在5C放电时,电池的发
热量快速上升。(2)采纳液体冷却方法能有效降低电池表面的温度,电
池组之间最大温度的温差始终在1℃以内,均匀性较好;不过单体电池内外温差较大,特别是在大倍率放电且流体入口质量小时,最大温差
达到了7.16℃,这对电池循环寿命有一定影响。(3)电池组在大倍率放电时,单个电池内外温差也大,需要强有效的冷却方案,能够通过增
大质量流量来降低温度,从仿真结果能够看出,质量流量越大,温度
下降越快,温差也越小。(4)降低液体温度,也能够有效降低电池组的
温度,不过散热器本身功耗也相对应的增大,所以需要有效的热治理
策略,操纵入口流体温度和质量流量,使得电池工作在合理的温度范
围内,同时散热器的能耗最小。
散热器结构设计论文
题目自动调光灯的设计 姓名丁贺学号 0903130128 系(院)电子电气工程系 班级 P09电子信息 指导教师冯泽虎 二O一一年一月六日
摘要: 自动调光灯的安装、焊接及调试,能让我们了解电子产品的装配过程;掌握电子元器件的识别及质量检验;学习整机的装配工艺;培养动手能力。 关键词:自动调光灯的安装、调试、工作原理。 一、引言:有时侯我们自以为简单的事情,当做起来时才知道并不是我们想象的那么简单。任何一件事要做好都要掌握一定的技术,还必须具备一定的素质才能完成。要了解一项工种,掌握焊接和电子工艺的操作技术,光靠看书本和讲解是不行的。所谓实习就是要我们自己实际的去练习,去操作。要真正的把从书本的理论知识转到实际操作、实践中去。还有就是不能由着自己的性子来操作, 电路原理:利用电阻电容元件构成触发电路调光灯电路,交流电经过单相桥式整流电路变成直流触发电压,加在晶闸管的电极上,直到脉动经过滑动变阻器,电阻,向电容充电,当充至一定值时,晶闸管开通,灯泡发光,当双向晶闸管的电压过零时,晶闸管管断,不断重复以上过程,调节滑动变阻器改变电容的充电速率,所以改变晶闸管的导通角,从而灯泡正电流的有效值发生变化。 二、安装前的准备工作: 所需的基本工具:电烙铁(焊枪)、烙铁架、松香、万用表、镊子、偏口钳、螺丝刀。 焊接工艺要求: 1、在焊接之前要仔细的查看个元件的个数,以及用万能表测试个元件性能是否为良好的。2、要清楚的识别元件种类和作用3、在撤离电烙铁的同时要保证电路板不要晃动以免产生虚焊。4、在焊接三极管的时候要注意分清它的集电极、基础极和发射极。5、在焊接中要服从后级向前级安装,先小后大的原则。 焊接工艺实训的体会:在电焊的收音机的时候,学会电焊应该是我最大的收获,下面简单介绍以下焊接的体会,焊接最需要注意的是焊接的温度和时间,焊接时要使电烙铁的温度高于焊锡,但是不能太高,以烙铁接头的松香刚刚冒烟为好,焊接的时间不能太短。 三、自动调光灯的电路方框图,电路图如下:
龙源期刊网 https://www.doczj.com/doc/947272235.html, 大功率LED灯散热器结构设计 作者:潘裕向文江 来源:《山东工业技术》2018年第05期 摘要:针对大功率LED灯工作时散热性差、灯具光功率减小、灯芯片易老化等问题,对大功率LED灯的散热器结构进行研究。详细介绍了LED灯散热技术、灯具的热分析及散热片的优化设计,并就LED灯散热问题在ANSYS软件中搭建模型进行散热器结构参数设计与热分析。仿真结果表明,通过热分析实现对LED灯散热结构参数设计,理论上在大功率LED灯中安装优化设计后的散热片可以很好的解决灯具工作时的散热问题。 关键词:大功率LED灯;热分析;ANSYS软件 DOI:10.16640/https://www.doczj.com/doc/947272235.html,ki.37-1222/t.2018.05.005 0 引言 发光二极管(Light Emitting Diode,LED)属于21世纪具有好的发展前景的新型冷光源[1]。LED灯的发光原理理就是靠是靠发光二极管内部的PN结里的电子在能带间跃迁进而产生光能,但芯片会出现发热的现象,尤其是大功率型LED。若将多个LED串并联组装成一个模组,其散发出的热量会大大增加。目前,LED整体工作效能不是很好,只有15%-20%的电能量成功转化为光能,而剩余的80%-85%的电能量则通过其它形式转化为热能,致使芯片功率 密度变得很大。在行业内LED器件的散热性整体而言较差,首先,因为发白光的LED灯其发光的光谱中并不包含红外部分,即其工作时产生的热量不能依靠红外辐射进行释放;其次,LED灯具本身的扩散热阻与解除热阻很大,工作时产生热量较多。在LED灯工作时,若散热性不好将会产生十分严重的后果[2],如缩减LED灯的光能量输出,减少器件的使用寿命,会造成LED发射光的主波长产生偏移等。 近年来,如何使LED灯工作时产生的热能以最快的方式散发出去这一关键问题被国内外学术界关注,进而相对应地进行各种研究。由于LED灯具多采用经验化设计进行散热,散热装置过于传统且专业性不高,导致当前LED灯具的散热问题仍未得到解决。因而,通过对大功率LED灯具的热分析与热设计后进行散热器的结构设计具有及其重要的现实意义。 论文详细介绍了LED灯的散热技术并建立相应散热器模型,然后选取了一款大功率的LED灯作为论文的研究模型,利用ANSYS有限元分析软件[3]对该款LED灯模型进行热分析,得到灯具各点的温度分布与芯片工作时产生的最高温度,在上述测量数据的基础上对该灯的散热结构进行优化设计,最终得到十分满意的散热效果。 1 LED灯散热技术及模型建立 1.1 LED灯散热技术
轮式移动机器人的结构设计 摘要:随着机器人技术在外星探索、野外考察、军事、安全等全新的领域得到日益广泛的采用,机器人技术由室内走向室外,由固定、人工的环境走向移动、非人工的环境。本课题是机器人设计的基本环节,能够为后续关于机器人的研究提供有价值的平台参考和有用的思路。 本文介绍了已有的机器人移动平台的发展现状和趋势,分析操作手臂常用 的结构和工作原理,根据选定的方案对带有机械臂的全方位移动机器人进行本 体设计,包括全方位车轮旋转机构的设计、车轮转向机构的设计和机器人操作 臂的设计。要求全方位移动机构转向、移动灵活,可以快速、有效的到达指定 地点;机械臂操作范围广、运动灵活、结构简单紧凑且尺寸小,可以快速、准 确的完成指定工作。设计完成后要分析全方位移动机构的性能,为后续的研究 提供可靠的参考和依据。 关键字:机器人移动平台操作臂简单快速准确
Structure design of wheeled mobile robots Abstract:with the robot technology in an alien exploration, field survey, military and security new areas to be increasingly widely adopted, robot technology by indoor, outdoor by fixed, to move towards artificial environment, the artificial environment. This topic is the basic link, robot design for the follow-up about robots can provide valuable reference and useful ideas platform. This article summarizes the existing robot mobile platform development status and trends of operating the arm structure and principle of common, According to the selected scheme of mechanical arm with ontology omni-directional mobile robots designed, including the design of all-round wheel rotating mechanism, wheel steering mechanism of design and the design of robot manipulator. Request to change direction, move the omni-directional mobile institution, can quickly and effectively flexible the reaches the specified location; Mechanical arm operation scope, sports flexible, simple and compact structure and size is small, can quickly and accurately completed tasks. The design is completed to analyze the performance of the omni-directional mobile institutions for subsequent research, provide reliable reference and basis. Keywords: Robot mobile platform manipulator simple accurate and quick
电子产品制造工艺论文 一、概述 电子产品制造工艺针对电子产品制造企业的技术发展及岗位需求,注重描写电子产品制造流程中的几个主要环节:装配、焊接、调试和质量控制,详细介绍电子制造业技能型人才应该掌握的基本知识;SMT工艺中的印刷、贴片、焊接(包括当前的工艺热点无铅焊接)、检测技术及相关工具(如ICT、AOI、BGA植球器等)的调试与使用;生产过程的防静电问题;作为检验人员应该熟悉的知识与方法;作为工艺人员编写工艺文件、管理技术档案的知识;为企业出口产品而参加各种认证的工作等。 二、电子工艺技术入门 (1)、主要介绍了电子工艺技术的基础知识,在研究电子整机产品制造过程中材料、设备方法、操作者和管理者这几个要素是电子工艺的基本特点,通常用“4m+m”来简化电子产品制造过程的基本要素。 (2)、了解电子工艺学具有涉及众多科学技术领域,形成时间较晚发展迅速的特点及我国电子工业的发展现状及其薄弱环节。 (3)、熟悉了电子产品工艺操作安全的知识,了解电子产品中电路板生产的基本流程如下: 1.生产设备 2.自动贴片 3.再流焊 4.自动插件 5.人工插件 6.波峰焊(浸焊) 7.手工补焊 8.修理 9.检验测试 10.包装 三、从工艺的角度认识电子元器件 通常说来,在电子行业,元件是指电阻器、电容器、电感器、接插件和开关等无源元件:器件是指晶体管、集成电路等有源元件。但在实际工作中,对两者不严格区别,统称电子元件即可。 ( 1)、通过本章的学习熟悉了解电子元器件的型号命名以及标注方法。通常电子元件的名称反映他们的种类、材料、特征、型号、生产序号及区别代号,并且能够表示出主要的电气参数。电子元器件的名称有字母和数字组成。而其型号和各种参数应当尽可能的在元器件的表面上标注出来。常用的标注方法有三种: 直标法: 把元器件的主要参数直接印制在元器件的表面上即直标法。这种方法直观,只能用于体积较大的元器件。例如:电阻器的表面上印有RXYC-50-T-1K5-+10%(-10%),表示其种类为耐潮披釉线绕可调电阻器,额定功率50W,阻值为1.5千欧,允许偏差为正负10%。 文字符号法:
夏天到来,专注DIY的我们开始对CPU散热器“关怀备至”。其实,这个能让CPU“变废为宝”的小小玩意,始终都是众多DIYer们关心的热门话题,尤其是那些超频发烧友。近期AMD X2处理器不断降价,Intel新双核奔腾、单核酷睿赛扬各显神通,这些低端单/双核超频悍将给主流DIY市场留下了太多的想象空间。跃跃欲试的主流玩家希望购买到最匹配的散热器“压榨”CPU性能。 纵观市场上的CPU散热器,从低端的纯铝鳍片,到中端的纯铜、铝鳍塞铜式、铝鳍压铸铜式、热管式,再到高端的水冷、油冷、半导体制冷、压缩机制冷、干冰制冷、液氮制冷、液氦制冷等等一应俱全。散热方式从被动散热到主动散热,再到主动制冷,品种五花八门,种类极其繁多。 在如此琳琅满目的散热器产品中,如何才能挑选到适合自己的CPU散热器呢?下面我们就从“理论”入手,详细介绍一下各种材质、结构散热器的性能分析。 风冷散热器 作为中低端散热器市场的首要选择,风冷散热器在性价比上获得了很好的平衡。材质普通、结构简单的产品几十元即可买到,应付入门级处理器超频没有问题。而要想获得更高性能,风冷散热器一样可以提供材质高档、结构先进的“前卫”型产品。一套完整的风冷散热器应该是由散热片、风扇和扣具三部分组成,下面我们分别进行介绍。 散热片 1.纯铝散热片 纯铝散热片 这种散热片是目前使用率最高的散热片之一,整体采用纯铝制造。铝是地球上含量最高的金属,成本低和热容低是其主要特点。虽然吸慢,但放热快,散热效果跟其结构和做工成
正比。散热片数越多、底部抛光越好,散热效果越好。其散热原理非常简单:利用散热器上的散热片来增大与空气的接触面积,再利用风扇来加速空气流动从而带走散热片上的热量。采用纯铝材质的散热片价格低廉,搭配低端CPU使用性价比合理。 2.纯铜散热片 纯铜散热片 顾名思义,纯铜散热片的材质为纯铜。因为铜跟铝相比有个先天的优点:热传导效能为412w/mk,比铝的226w/mk提高了将近1倍,但铜也有个先天的缺点:热容太高了。也就是说这种散热片吸热快但放热慢,热量在铜片中大量聚集,需要配合高转速大尺寸风扇才能满足散热需求。 由于铜具有良好的韧性,因此制造上要比铝容易得多。散热片的密度也可以比铝做得更高,散热面积也相应更大,这些都可以弥补其热容高所导致散热慢的不足。但纯铜的成本要比铝高很多,还要搭配更高档次的风扇才能满足散热需求,直接导致纯铜散热器的价格居高不下,目前已经慢慢退出独立散热器的历史舞台。 3.铝鳍塞铜式散热片 铝鳍塞铜式散热片
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊ 搬运机器人结构设计与分析 摘要 在当今大规模制造业中,企业为提高生产效率,保障产品质量,工业机器人作为自动化生产线上的重要成员,逐渐被企业所认同并采用。工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平。目前,工业机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作。 本课题主要对搬运机器人的机械部分展开讨论,对原有的机械结构提出了新的改进方法,并把现在的新技术应用到本课题中,从而使得搬运机器人更加适用于现在的工业工作环境。通过详细了解搬运机器人在工业上的应用现状,提出了具体的搬运机器人设计要求,并根据搬运机器人各部分的设计原则,进行了系统总体方案设计以及包括:机器人的手部、腕部、臂部、腰部在内的机械结构设计。此搬运机器人的驱动源来自液压系统,执行元件包括:柱塞式液压缸、摆动液压缸、伸缩式液压缸等。通过液压缸的运动来实现搬运机器人的各关节运动,进而实现搬运机器人的实际作业。 关键词:搬运机器人;液压系统;机械结构设计;操作
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊ Abstract In the modern large-scale manufacturing industry,enterprises to improve productivity, and,guarantee product quality, as an important part of the automation production line, industrial robots are gradually approved and adopted by enterprises. Industrial robot technology standards and application level, to a certain extent, reflect a level of national industrial automation. Currently, Industrial robot mainly tasked with welding, spraying, handling and stacking, repetitive and intensity of significant work. The subject of the main part of the handling of their machinery discussions, and on the original mechanical structure proposed for the new improved method, which makes the handling robot is more applicable to the present industrial working environment.Through a detailed understanding of the robot in the industrial application,to propose specific handling robot design requirements,and according to the robot design principles of various parts,for the system as well as including:the robot's hand, wrist, arm, waist, the design of mechanical structures.The transfer robot driven by the source from the hydraulic system, and the implementation of components including:plunger hydraulic cylinders, hydraulic cylinders, swing, telescopic hydraulic cylinders, etc.Through the hydraulic cylinder movements to implement the joint transport robot motion,And realize the operational handling robot. Keywords:Transfer robot;Hydraulic System;Mechanical Design;Operating
毕业论文声明 本人郑重声明: 1.此毕业论文是本人在指导教师指导下独立进行研究取得的成果。除了特别加以标注地方外,本文不包含他人或其它机构已经发表或撰写过的研究成果。对本文研究做出重要贡献的个人与集体均已在文中作了明确标明。本人完全意识到本声明的法律结果由本人承担。 2.本人完全了解学校、学院有关保留、使用学位论文的规定,同意学校与学院保留并向国家有关部门或机构送交此论文的复印件和电子版,允许此文被查阅和借阅。本人授权大学学院可以将此文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本文。 3.若在大学学院毕业论文审查小组复审中,发现本文有抄袭,一切后果均由本人承担,与毕业论文指导老师无关。 4.本人所呈交的毕业论文,是在指导老师的指导下独立进行研究所取得的成果。论文中凡引用他人已经发布或未发表的成果、数据、观点等,均已明确注明出处。论文中已经注明引用的内容外,不包含任何其他个人或集体已经发表或撰写过的研究成果。对本文的研究成果做出重要贡献的个人和集体,均已在论文中已明确的方式标明。 学位论文作者(签名): 年月
关于毕业论文使用授权的声明 本人在指导老师的指导下所完成的论文及相关的资料(包括图纸、实验记录、原始数据、实物照片、图片、录音带、设计手稿等),知识产权归属华北电力大学。本人完全了解大学有关保存,使用毕业论文的规定。同意学校保存或向国家有关部门或机构送交论文的纸质版或电子版,允许论文被查阅或借阅。本人授权大学可以将本毕业论文的全部或部分内容编入有关数据库进行检索,可以采用任何复制手段保存或编汇本毕业论文。如果发表相关成果,一定征得指导教师同意,且第一署名单位为大学。本人毕业后使用毕业论文或与该论文直接相关的学术论文或成果时,第一署名单位仍然为大学。本人完全了解大学关于收集、保存、使用学位论文的规定,同意如下各项内容: 按照学校要求提交学位论文的印刷本和电子版本;学校有权保存学位论文的印刷本和电子版,并采用影印、缩印、扫描、数字化或其它手段保存或汇编本学位论文;学校有权提供目录检索以及提供本学位论文全文或者部分的阅览服务;学校有权按有关规定向国家有关部门或者机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入学校有关数据库和收录到《中国学位论文全文数据库》进行信息服务。在不以赢利为目的的前提下,学校可以适当复制论文的部分或全部内容用于学术活动。 论文作者签名:日期: 指导教师签名:日期:
《混凝土结构设计原理》 2003年8月 第4章 受弯构件的正截面受弯承载力 习 题 4.1 查表知,环境类别为一类,混凝土强度等级为C30时梁的混凝土保护层最小厚度为25mm 。 故设a s =35mm ,则h 0=h -a s =500-35=465mm 由混凝土和钢筋等级,查表得: f c =14.3N/mm 2,f t =1.43 N/mm 2,f y =300N/mm 2, 1α=1.0,1β=0.8,b ξ=0.55 求计算系数 116.0465 2503.140.110902 6 201=????==bh f M c s αα 则 55.0124.076.01211b s =<=-=--=ξαξ,可以。 938.0)76.01(5.02 211s s =+=-+= αγ 故 688465 938.030010906 0s y s =???==h f M A γmm 2 268500250300 43.145.0)45 .0(y t s =???=>bh f f A mm 2 且 250500250002.0002.0=??=>bh A s mm 2,满足要求。 选用3 18,A s =763mm 2,配筋图如图1所示。 4.2 梁自重:2 5.245.002.025' k =??=g kN/m 则简支梁跨中最大弯矩设计值: M 1=)(2 Qik Ci Qi Q1k Q1Gk G 0∑=++n i M M M ψγγγγ =]8 1)(81[2k Q 2' k k G 0l q l g g ?++?γγγ 465 500 35 250 3 18 图1
图2 =1.0×[222.588 1 4.12.5)2 5.25.9(812.1???+?+?? ] =85.514kN 〃m M 2=)(1 Qik Ci Qi Gk G 0∑=+n i M M ψγγγ =]8 1)(81[2k Ci Q 2' k k G 0l q l g g ψγγγ?++? =1.0×[2 22.588 17.04.12.5)25.25.9(8135.1????+?+??] =80.114 kN 〃m M =max {M 1,M 2}=85.514 kN 〃m 查表知,环境类别为二类,混凝土强度等级为C40,梁的混凝土保护层最小厚度为30mm ,故设a s =40mm ,则h 0=h -a s =450-40=410mm 由混凝土和钢筋等级,查表得: f c =19.1 N/mm 2,f t =1.71 N/mm 2,f y =360N/mm 2, 1α=1.0,1β=0.8,b ξ=0.518 求计算系数 133.0410 2001.190.110514.852 6 201=????==bh f M c s αα 则 518.0143.0211b s =<=--=ξαξ,可以。 928.02 211s s =-+=αγ 故 624410 928.036010 514.856 s y s =???= = h f M A γmm 2 192450200360 71.145.0)45 .0(y t s =???=>bh f f A mm 2 且 180450200002.0002.0=??=>bh A s mm 2,满足要求。 选用2 16+1 18,A s =657mm 2,配筋图如图2所示。 4.3 取板宽b =1000mm 的板条作为计算单元。 450 410 40 200 2 16 1 18
绿化植树机器人设计 摘要: 这个机器人是针对大量绿色植树而设计的,利用机械四足作为其活动方式,机器人通过视频识别系统在有限范围内对地形与植被作出判断,然后通过自动行走系统移动到目标地点前面,再通过机械手取出携带的植物幼苗,通过这个可以360度旋转的机械臂进行种植工作,机械臂可以进行种植、培土、等工作。种植完成后还将用一层可分解的塑料薄膜覆盖植物幼苗,保证其在能够自行成长前的安全。 关键词: 绿化植树、四足行走、山坡作业、视频识别、机械臂操作 设计背景: 地球现在正面临着绿色植被在不断减少的危机,而人类也因为这样要面对日益严峻的环境问题。大量植树还原绿色植被是一个相当重要的手段来解决这个难题,但是依靠人力去做的话,效率始终不够高。所以在这里我想设计一个专门用于大作业量的绿化植树机器人。 设计思路: 这个机器人,是需要面对山坡这样的陡峭地形的,由于特殊的使用环境,机器人的活动方式要求能够灵活的应对颠簸不平的土地,机械四足需要能够根据不同的地势调整四足的高度,确保平稳的行走,这种活动方式才能使机器人轻松到达山崖大部分位置。移动起来必须十分的轻巧,以避免对其他植物的伤害。由于这个机器人对视频识别有着较高的要求,所以必须在这方面有所突破,同时当发现有杂草或者有害植物的时候,还可以通过高温蒸汽将其杀死,来保证种植的植物幼苗的生长。360度旋转的机械臂可以保证种植过程的顺利进行。 详细具体设计方案: 一.整体结构: 1.整个机器人分成上下两大部分,上部分是机械手臂,主要实现机器人的整个种植 操作,下部是机器人的机身和四足,包括:植物幼苗存放仓、红外线距离测量 仪、摄像头、电脑处理系统。 2.机器人是通过电力驱动的,所以必须携带储电池,也是安装在机身。 二.中央处理系统: 机器人的机身将安装一个中央处理系统,作为机器人的大脑,它主要调节机器人三 大系统:机械四足行走系统、机器人视觉系统、机械臂控制系统。中央处理系统要 接收和分析红外线距离测量仪、摄像头、机械臂传感器等反馈信息,以及控制四足 的行进系统、机械臂操作等。 三.机械四足行走系统: 1.机械四足的形状: 一开始的时候,我曾经很困惑于如何把握行走稳定与行走速度之间的平衡,后来设 想出仿人类四肢的关节加上圆形的脚盘这个方案,总体感觉可以满足行走的需要。 2.如何实现行进: 参考了机械小狗的设计,将机械四足连接在机器人的中央处理系统而成为一个整 体,接受中央处理系统的控制。每次改变一个机械足的位置,实现整个机器人的行
某中学学生宿舍楼进行建筑和结构设计毕业论文 第一章工程概况 1.1 工程背景 本项目为5层钢筋混凝土框架结构体系,占地面积约为454.45 m2,总建筑面积约为2272.25 m2;层高3.3m,平面尺寸为12.3m×36.0m。采用柱下条形基础,室地坪为±0.000m,室外高差0.6m。 框架梁、柱、楼面、屋面板板均为现浇。 1.1.1 设计资料 气象资料:基本风荷载W。=0.45kN/ m2 基本雪荷载为0.4 kN/ m2。 地质条件:钻孔深度12米,未发现地下水。不考虑地下水影响。 建筑地点冰冻深度:室外天然地面以下200mm。 地震设防烈度:8度 设计地震分组:场地为П类一组Tg(s)=0.35s, a max=0.08 1.1.2 建筑材料 柱采用C30,纵筋采用HRB335,箍筋采用HPB235,梁采用C30,纵筋采用HRB335,箍筋采用HPB235。基础采用C30,纵筋采用HRB400,箍筋采用HPB235。 1.2 工程特点
本工程为五层,主体高度为16.5米,属多层建筑。 经过结构论证和设计任务书等实际情况,以及本宿舍楼有较单一的空间布置,和较高的抗震等级等特点,决定采用钢筋混凝土框架结构体系。 1.3 本章小结 本章主要论述了本次设计的工程概况、相关的设计资料以及综合本次设计所确定的结构体系类型。 第二章结构设计 2.1框架结构设计计算 2.1.1 工程概况 本项目为5层钢筋混凝土框架结构体系,占地面积约为454.45 m2,总建筑面积约为2272.25 m2;层高3.3m平面尺寸为12.3m×36.0m。采用柱下条形基础,室地坪为±0.000m,室外高差0.6m。 框架平面同柱网布置如下图:
组合结构设计原理结课论文 随着我国钢材产量的逐年增加和高强度、高性能建筑结构用钢的大量生产,我国已进入了大力发展钢结构建筑的新时期,由此便产生了钢—混凝土组合结构。该种结构适应现代结构对“轻型大跨、预制装配、快速施工”的要求在房屋建筑、桥梁、地下建筑、海洋工程、特殊容器等领域得到应用。 组合结构的发展史 国际: 1879年英国的Severn在铁路桥的钢管桥墩中充填混凝土,形成钢管混凝土结构 英、美等国在钢梁与钢柱外围包上了混凝土形成组合梁、柱,用以防火。 20世纪初,佚名人士在方钢管中注入混凝土。 1928年日本开始对SRC结构进行研究(即1923年日本关东大地震后) 1965年英国制定CP117第一部分《钢-混凝土组合结构-房屋建筑》 1967年英国制定CP117第二部分《钢-混凝土组合结构-桥梁》 1967年日本制定《钢管混凝土构件设计规范》 1984年欧洲规范(EUROCODE-4)草案在英国完成,是目前国际上比较完整的组合结构规范。 国内: 50年代我国开始在桥梁工程中采用组合结构 1986年交通部制定《公路桥涵设计规范》对组合梁的计算方法及构造做出规定。 1988年《钢结构设计规范》(GBJ17-88)对组合梁做出规定。 现行标准规范: 钢结构设计规范GB50017-2003 冷弯薄壁型钢结构技术规范GB50018-2002 高层建筑钢结构技术规程JGJ99-98 钢管混凝土结构技术规程CECS28:90 型钢混凝土组合结构技术规程JGJ138-2001 钢骨混凝土结构技术规程YB9082-97 钢结构加固技术规范CECS77:96 组合结构特点 1、充分利用钢材和混凝土各自的材料性能,具有承载力高、刚度大、抗震性能和动力性能好、构件截面尺寸小、施工快速方便等优点。日本阪神地震表明,组合结构破坏率最低。 2、节省脚手架和模板,便于立体交叉施工,减小现场湿作业量,减轻扰民程度。 3、造价低。若考虑因自重减轻而带来的竖向构件截面尺寸减小、地震作用减小、基础造价降低、施工周期短等因素,组合结构比混凝土结构和钢结构造价都要低。 钢与混凝土组合梁 1、结构组成
姓名:张键班级:电子1202学号:201215034设计题目:红外防盗报警系统 一、设计意义: 随着社会经济的飞速发展和人民物质生活水平的不断提高,人们对其住宅的要求也越来越高,表现在不仅希望拥有舒适、温馨的住所,而且对其安全性、智能性等方面也提出了更高的要求。随着流动人口迅速增加,盗窃、入室抢劫等刑事案件也呈现出了增长趋势,并且危害越来越严重,人们越来越渴望有一个安全生活的空间,但是犯罪分子的作案手段越来越高明,他们甚至采用一些高科技的作案手段,使得以往那种依靠安装防盗门窗、或靠人防的防范方式越来越不能满足人们日常防范的要求;人们迫切需要一种智能型的家庭安全防范报警系统,及时发现各种险情并通知户主,以便将险情消灭在萌芽状态,保证居民的生命财产不受损失。 目前,国内市场上的防盗报警器系统大部分是国外品牌,国内防盗报警器产品厂商发展时间比较短,真正取得长足发展也是在2000年以后,特别是在2004年国内有些厂商迅速成长,投资规模和企业规模都在迅速发展和扩大。但是与国外厂商相比还有很大差距。现阶段,大部分工程商安装防盗报警产品时倾向于国外品牌,其中,安装的国外产品主要来自于美国、日本和韩国,这三个国家的产品占据我国报警市场的近80%的份额。这主要是因为,在产品供给市场上,绝大部分国外品牌来自美国和日韩,防盗报警产品在这些国家的发展已
经非常成熟,产品功能稳定,性能完善,再加上进入我国是时间较早,所以在我国市场上占有相当大的份额。因此我做这个产品的目的在于,使每个人都能用上性价比好的产品,让更少的人受到财产的损失。 二、工作原理: 在门的边框上,安装红外对射管,用以检测是否有人通过。在门钥匙处有一个触发开关,用来判断是否是正常开门。当门钥匙没有打开,而且有人通过时,也就是非正常进入,红外对管没有检测到信号,输入高电平到单片机,单片机输出信号到蜂鸣器和红色的LED灯,同时LCD1602显示“W ARING!THE THIEF ARE COMING”,告诉用户有小偷闯入,提醒注意,只有通过按下复位开关警报才可以解除。当钥匙打开门,并且有人通过时,也就是正常开门,单片机输出信号到绿色LED灯上,同时LCD1602上显示“SAFETY WELCOME MASTER”告诉用户是正常开门,欢迎回来。 三、系统硬件设计: 1)关键器件介绍: 1.LCD1602简介: 1602液晶也叫1602字符型液晶,它是一种专门用来显示字母、数字、符号等的点阵型液晶模块。它是由若干个5x7或者5x11等点阵字符位组成,每个点阵字符位都可以显示一个字符,每位之间,有一个点距和行间的作用,正因为如此所以它不能很好地显示图形。LCD1602是指显示的内容为16*2,即可以显示两行,每行16个字符液晶模块。
散热在结构设计中的应用___专栏! 包括,散热方式的选择,结构的设计,材料选用等 我先根据个人的一点经验,总结出来随便谈谈。 根据热传导的途径来说,散热相应有以下三种主要方式: 一、散热片导热式散热 1、良好接触面:要求发热件与散热片要有良好接触,尽可能降低接触热阻,所以最好有大的接触面,接触面还需要有较高的光洁度,为了弥补因接触面的粗糙而导致的贴合不良,可以在中间涂抹导热脂,可以有效降低接触热阻; 2、良好的导热材料:铜、铝都有较好的导热性能,铜的导热系数虽然优于铝,但铜有密度太高、价格贵的缺点,所以实际应用中铝材是应用最多; 3、散热片固定方式:这个也是比较重要的一环,如果不能把发热件与散热片良好接触,也是无法有效把热量传导到散热器上的,应用中有直接用螺丝钉紧固的,也有用弹簧片压固的,可以根据需要选择设计,需要说明的是,有些功率器件和散热片之间有绝缘要求,中间选用的绝缘材料就一定要选用低热阻的材料,比如:聚脂薄膜、云母片等,实际安装中还要注意固定位置应使用受力均匀分布; 4、散热片的形状:包括页片与基材的形状尺寸,要有尽可能加大散热表面积,这样散热片的热量才能快速与周围空气对流,比如说增加页片数目、在页片上做波浪纹都是好办法;基材要厚一些比较好,长而薄的散热片效率很差,在远端基本上是不起作用的了; 二、对流散热 1、自然对流:发热器件或者散热片的热量可以是依靠自然对流散热,这样的话,发热件或者散热片最好以长边取为垂直方向为佳,而且要尽量使散热片的横断面与水平面方向平行,因为热空气是上升的,这样才比较有利于空气流通,象单面页片式的散热器就比较适合安装在机体背板以自然对流方式散热; 2、强制对流:采用风扇强制吸、排的方式拉动一个风场来加强空气对流,是比较有效的散热方式,可以根据需要选择合适的风扇规格与数目,在设计上要注意的有这么几点: A、各风扇风场方向要一致,不要互相打架,否则效率肯定大打折扣,对机箱内部来说最好有相应的进风口与出风口,可以参考一下下面的附图,是一块显卡的散热设计; B、采用强制风冷时,对于页片式散热片来说,要使页片方向与风道气流方向一致 c、机箱上要根据风场的需要留出相应的散热孔,散热孔并非越多、越大就越好,首先散热孔的大小根据不同的安规等级有相应限制,还要考虑EMI的要求(可以参考一下附图);另外,重为重要的是:散热孔的分布要与风道气流的流向吻合, 三、辐射散热 这种散热方式给设计者留出的空间相对较少,对于发热器件与散热片来说,表面光洁度越高,辐射效率越差,所以比较廉价而且较有效的一个手段是把铝型材散热器表面做氧化处理,这层氧化层可以大大改善辐射效率(比如,一个表面研磨光洁的散热片,表面辐射率可能在0.1左右,做过氧化处理后,辐射率的值可以升高到1)
多层商场结构设计毕业论文 符 号 c E -混凝土弹性模量; C20-表示立方体强度标准值为20N/2mm 的混凝土强度等级; N -轴向力设计值; M -弯矩设计值; V -剪力设计值; A -构件截面面积; I -截面惯性矩; k G -永久荷载标准值; K Q -可变荷载标准值; G γ-永久荷载分项系数; Q γ-可变荷载分项系数; ek F -结构总水平地震作用标准值; E eq G G 、-地震时结构的重力荷载代表值、等效总重力荷载代表值; T -结构自振周期; RE γ-承载力抗震调整系数;
λ-构件长细比; ak f -地基承载力特征值; 0H -基础高度; d -基础埋置深度,桩身直径; γ-土的重力密度; k ω-风荷载标准值; n F ?-结构顶部附加水平地震作用标准值; u ?-楼层层间位移; e -偏心距; sv A -箍筋面积; B -结构迎风面宽度; 0h -截面有效高度; S A -受拉区、受压区纵筋面积。
目录 前言··························································第1章工程概况·············································。第2章结构布置及计算简图····································§2.1结构布置及梁,柱截面尺寸的初选························§2.1.1梁柱截面尺寸初选··································§2.1.2结构布置···········································§2.2框架计算简图及梁柱线刚度·····························§2.2.1确定框架计算简图··································§2.2.2框架梁柱的线刚度计算·····························第3章荷载计算···············································
《电子产品设计》 设计报告 设计时间: 班级: 姓名: 报告页数:
广东工业大学课程设计报告 设计题目数字电子钟逻辑电路设计 学院 专业 班级 学号姓名 成绩评定_______
教师签名_______
打印采用A4纸 一、设计任务与要求 二、设计方案及比较(设计可行性分析) 三、系统设计总体思路 四、系统原理框图及工作原理分析 五、系统电路设计及参数计算,主要元器件介绍及选择以及数据指标的测 量 六、画出电路原理图及PCB图 七、产品制作及调试 八、实验结果和数据处理 九、结论(设计分析) 十、问题与讨论 数字电子钟逻辑电路设计 一、实验目的: 1、掌握数字钟的设计方法; 2、熟悉集成电路的使用方法。 二、设计任务和要求: 1、设计一个有“时”,“分”,“秒”(23小时59分59秒)显示且有校时功能的电子钟; 2、用中小规模集成电路组成电子钟; 3、画出框图和逻辑电路图,写出设计报告; 4、选做:①闹钟系统。②整点报时。③日历系统。
三、方案选择和论证: 1.分秒功能的实现:用两片74290组成60进制递增计数器 2.时功能的实现:用两片74290组成24进制递增计数器 3.定点报时:当分秒同时出现为0时,灯亮。 4.日历系统:月跟日分别用2片74192实现,月份就接成12进制,日则接成31进制,星期由1片74192组成7进制,从星期一至星期天。 四、方案的设计: 1、可调时钟模块: 秒、分、时分别为60、60和24进制计数器。用两片74LS290做一个二十四进制, 输入计数脉冲CP加在CLKA’端,把QA与与CPLB’从外部连接起来,电路将对CP按照8421BCD码进行异步加法计数。通过反馈端,控制清零端清零,其中个位接成二进制形式,十位接成四进制形式。其电路图如下: 同理利用两片74290组成的六十进制计数器,如下图所示
散热器设计 型材散热器的几何结构由肋片和基座构成,主要几何参数包括肋片长、肋片厚,肋片数、基座厚、基座宽等,研究了型材散热器几何因素对其热性能的影响,通过改变散热器的几何参数,可以有效的降低散热器的热阻,获得好的散热效果。本文的研究为型材散热器的的选择及优化设计提供了依据。 关键词:功率器件;热设计;散热器;热阻 功率器件是多数电子设备中的关键器件,其工作状态的好坏直接影响整机可靠性。功率器件尤其是大功率器件发热量大,仅靠封装外壳散热无法满足散热要求,需要配置合理散热器有效散热,而散热器的选择是否合理又直接影响功率器件的可靠性,因此分析影响散热器散热性能的因素,有利于合理选取散热器,提高功率器件的可靠性。 1 散热器的选择 在电子设备热设计中,型材散热器由于结构简单,加工方便、散热效果好而得到了广泛的应用,其物理模型示意图如图1所示。 它由肋片和基座构成,主要的几何参数包括肋片长、肋片厚,肋片数、基座厚、基座宽等。在选择散热器时一般需要依据散热器热阻来合理选择,同时还需要考虑以下几点:安装散热器允许的空间、气流流量和散热器的成本等。散热器散热的效果与散热器热阻的大小密切相关,而散热器的热阻除了与散热器材料有关之外,还与散热器的形状、尺寸大小以及安装方式和环境通风条件等有关,目前没有精确的数学表达式能够用来计算散热器的热阻,通常是通过实际测量得到。而散热器的有效面积与散热器几何参数密切相关。 2 影响散热器散热性能的几何因素分析 通过实验发现,散热器的几何因素对散热器的散热性能有很大的影响,现以一典型型材散热器为例,分析散热器各几何参数对散热器散热性能的影响。 选定某一功率器件(LM317)为热源,其工作电路原理图如图2所示。工作在自然冷却条件下,环境温度为30℃,功耗为3.2 W,选取的散热器为型材散热器SYX-YDE(物理模型如图3所示),散热器各个几何参数如表1所示。 热源与散热器表面为金属与金属的干接触,无绝缘片也未涂硅脂或导热胶,查有关手册取热 源与散热器之间的接触热阻为0.9℃/W。通过散热器设计分析软件进行初步分析,散热器优化设计分析软件采用的是美国Flunt公司的Qfin软件,它采用计算流体动力学求解器,有限体积法,非结构化网格可以逼近复杂的几何形状,同时能实现散热器肋片高度、长度等几何参数的优化。中国可靠性网https://www.doczj.com/doc/947272235.html, 通过散热器优化设计分析软件得到的散热器和热源相关热参数见表2。
工业机器人 摘要 在当今大规模制造业中,企业为提高生产率,保障产品质量,普遍重视生产过程的自动化程度,工业机器人作为自动化生产线上重要的成员,逐渐被企业所认同并采用。工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平。目前,工业机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动程度极大的工作,工作方式一般采取示教在线的方式。 本文将设计一台圆柱坐标型的工业机器人,用于给冲压设备运送物料。首先,本文将设计机器人的大臂、小臂、底座和机械手的结构,然后选择合适的传动方式、驱动方式,搭建机器人的结构平台:在此基础上,本文将设计该机器人的控制系统,包括数据采集卡和伺服放大器的选择、反馈方式和反馈元件的选择、以及控制元件的设计,重点加强控制软件的可靠性和机器人运行过程的安全性,最终实现的目标包括:关节的伺服控制和制动问题、实时监测机器人的各个关节的运动情况、机器人的示教编程和在线修改程序、设置参考点和回参考点。
目录 摘要 1绪论 (1) 1.1 工业机器人研究的目的和意义 (1) 1.2 工业机器人在国内外的发展现状与趋势…………………….. 1.3 工业机器人的分类 1.4 本课题研究的主要内容 2 总体方案的确定 2.1 结构设计概述 2.2 基本设计参数 2.3 工作空间的分析 2.4 驱动方式 2.5 传动方式确定 3 搬运机器人的结构设计 3.1 驱动和传动系统的总体结构设计 3.2 手爪驱动气缸设计计算 3.3 进给丝杠的设计计算 3.4 驱动电机的选型计算
3.5 手臂强度校核 4 搬运机器人的控制系统 4.1 机器人控制系统分类 4.2 控制系统方案分析 4.3 机器人的控制系统方案确定 4.4 PLC及运动控制单元选型 5 结论与展望 致谢