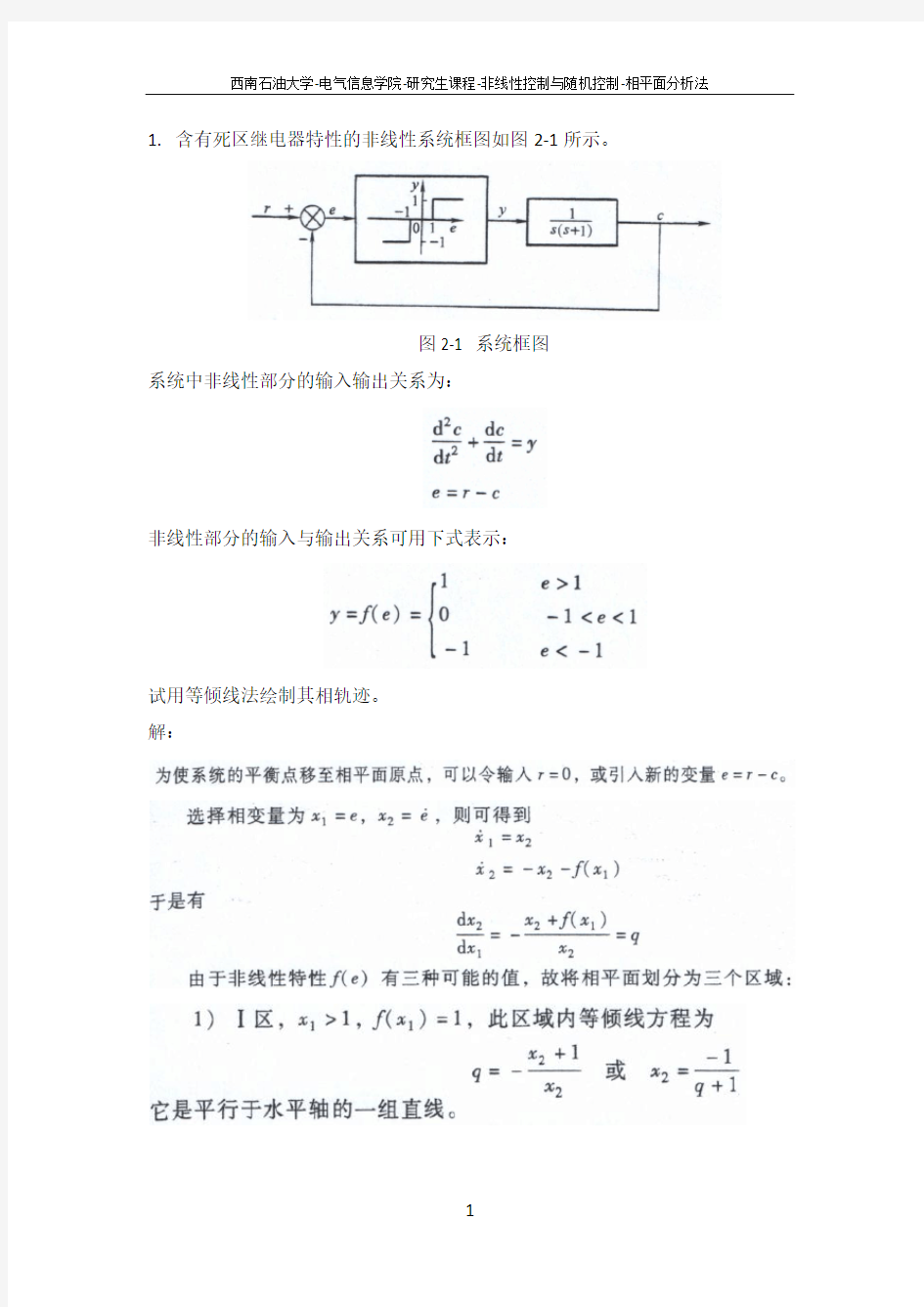
1.含有死区继电器特性的非线性系统框图如图2-1所示。
图2-1 系统框图
系统中非线性部分的输入输出关系为:
非线性部分的输入与输出关系可用下式表示:
试用等倾线法绘制其相轨迹。
解:
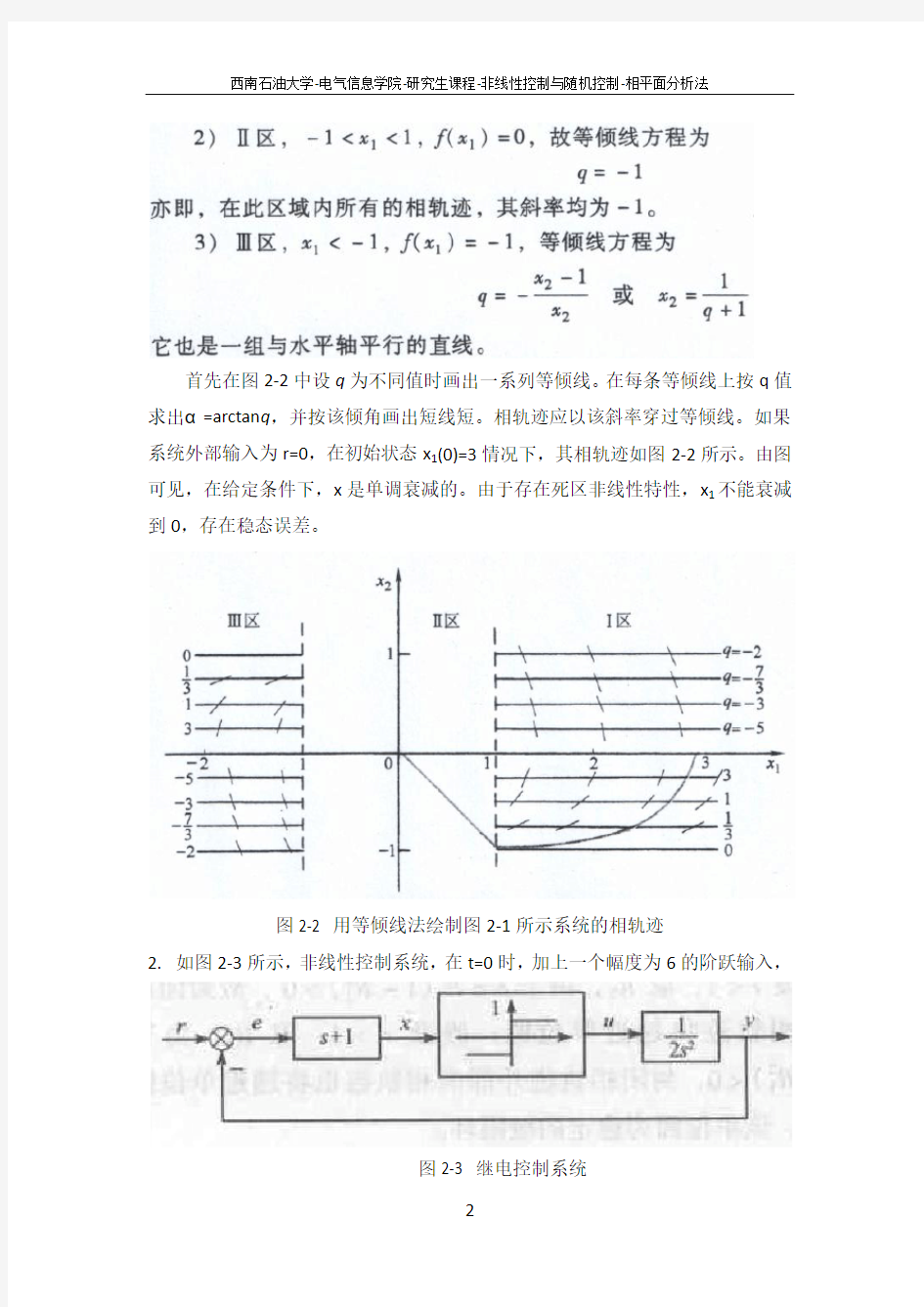
首先在图2-2中设q为不同值时画出一系列等倾线。在每条等倾线上按q值求出α=arctan q,并按该倾角画出短线短。相轨迹应以该斜率穿过等倾线。如果系统外部输入为r=0,在初始状态x1(0)=3情况下,其相轨迹如图2-2所示。由图可见,在给定条件下,x是单调衰减的。由于存在死区非线性特性,x1不能衰减到0,存在稳态误差。
图2-2 用等倾线法绘制图2-1所示系统的相轨迹
2.如图2-3所示,非线性控制系统,在t=0时,加上一个幅度为6的阶跃输入,
图2-3 继电控制系统
系统的初始状态为e(0)=6,e(0)=0,问系统经过多长时间可到达原点。
图2-4 继电控制系统的相轨迹
3.试分析图2-5所示具有摩擦阻力的系统。图中F f表示摩擦阻力,它包括
图2-5 系统框图
或
在图2-6中画出了当系统参量为K=1.25,f c=0.25,f v=0.25时的相轨迹。
图2-6 图2-5系统的相轨迹
图2-5所示系统的稳定性没有问题,但稳态误差可能比较大,也就是要求系统总是最终收敛到状态平面的原点是难于做到的。在实际中,对于具有干摩擦非线性的系统,为提高稳态精度,可用反复加入微小的正、负输入信号,以克服由于干摩擦带来的稳态精度不高的缺点。
4.非线性控制系统如图2-7所示,令K=1。讨论下面情况下的e-e相轨迹:当输入信号为阶跃信号r(t)=R,系统的初始状态为0。
图2-7 系统框图
解:首先根据控制系统框图,设法得到各分区的线性方程。由
得到:;将代入方程,有:
式中、为饱和非线性的输出。根据饱和非线性的输入输出特性,可将相平面分为:正饱和、负饱和以及线性区域,如图2-8所示。
图2-8 相平面区域划分图
当输入信号时,,则各区域上的线性方程:
当输入信号为阶跃信号,系统的初始状态为零;在正、负饱和区域根轨迹是相线根轨迹,而在线性区,由于参数均大于0,奇点可能是稳定焦点或稳定节点,位于相平面的原点,系统的初始状态,因此可粗略画出其相轨迹如2-9所示。
图2-9 输入为阶跃信号的相轨迹
相平面法例题解析: 要求: 1.正确求出对于非线性系统在每个线性区的相轨迹方程,也就是e e - 之间关系的方程(或c c - )。会画相轨迹(模型中是给具体数的)。※※关键是确定开关线方 程。 2. ※※※如果发生自持振荡,计算振幅和周期。 注意相平面法一般应: 1)按照信号流向与传输关系。线性部分产生导数关系,非线性部分形成不同分区。连在一 起就形成了不同线性分区对应的运动方程,即含有c 或者e 的运动方程。 2)※※※根据不同线性分区对应的运动方程的条件方程确定开关线方程。开关线方程确定很关键。 3)※※※根据不同线性分区对应的运动方程,利用解析法(分离变量积分法或者消去t 法) 不同线性分区对应的相轨迹方程,即c c - 和e e - 之间关系。 4)※根据不同分区的初始值绘制出相轨迹,并求出稳态误差和超调、以及自持振荡的周期和振幅等。 例2 问题1. 用相平面法分析系统在输入r (t ) = 4.1(t )时的运动情况。 问题2. 如果发生自持振荡 ,求自持振荡的周期和振幅。 解:问题1:1)设系统结构图,死区特性的表达式: 0,||2 2,22,2x e x e e x e e =≤?? =->??=+<-? 2)线性部分: 2 ()1 ()C s X s s =,则微分方程为:c x = 3)绘制e e - 平面相轨迹图。因为e r c =-,c r e =-,c r e =- ,c r e =- 。代入则 e x r =-+ (1) 当0t >,0r = ,0r = 。代入,则各区的运动方程0,||2I 2,2II 2,2III e e e e e e e e =≤--?? =->---??=--<----? 由于非线性特性有3个分区,相平面e e -分为3个线性区。 注意,当相平面选好后,输入代入后,最后代入非线性特性。 4) 系统开关线:2e =±。 5) 由题意知初始条件(0)(0)(0)4e r c =-=,(0)(0)(0)0e r c =-= 在II 区,则从
Matlab编程实现主成分分析 .程序结构及函数作用 在软件Matlab中实现主成分分析可以采取两种方式实现:一是通过编程来实现;二是直接调用Matlab种自带程序实现。下面主要主要介绍利用Matlab的矩阵计算功能编程实现主成分分析。 1程序结构 2函数作用 Cwstd.m——用总和标准化法标准化矩阵 Cwfac.m——计算相关系数矩阵;计算特征值和特征向量;对主成分进行排序;计算各特征值贡献率;挑选主成分(累计贡献率大于85%),输出主成分个数;计算主成分载荷 Cwscore.m——计算各主成分得分、综合得分并排序 Cwprint.m——读入数据文件;调用以上三个函数并输出结果
3.源程序 3.1 cwstd.m总和标准化法标准化矩阵 %cwstd.m,用总和标准化法标准化矩阵 function std=cwstd(vector) cwsum=sum(vector,1); %对列求和 [a,b]=size(vector); %矩阵大小,a为行数,b为列数 for i=1:a for j=1:b std(i,j)= vector(i,j)/cwsum(j); end end 3.2 cwfac.m计算相关系数矩阵 %cwfac.m function result=cwfac(vector); fprintf('相关系数矩阵:\n') std=CORRCOEF(vector) %计算相关系数矩阵 fprintf('特征向量(vec)及特征值(val):\n') [vec,val]=eig(std) %求特征值(val)及特征向量(vec) newval=diag(val) ; [y,i]=sort(newval) ; %对特征根进行排序,y为排序结果,i为索引fprintf('特征根排序:\n') for z=1:length(y) newy(z)=y(length(y)+1-z); end fprintf('%g\n',newy) rate=y/sum(y); fprintf('\n贡献率:\n') newrate=newy/sum(newy) sumrate=0; newi=[]; for k=length(y):-1:1 sumrate=sumrate+rate(k); newi(length(y)+1-k)=i(k); if sumrate>0.85 break; end end %记下累积贡献率大85%的特征值的序号放入newi中fprintf('主成分数:%g\n\n',length(newi)); fprintf('主成分载荷:\n') for p=1:length(newi)
第八章 习题 8-1已知具有理想继电器的非线性系统如图8-1所示,试用相平面法分析: 图8-1 (1)T d =0时系统的运动; (2)T d =0.5时系统的运动,并说明比例微分控制对改善系统性能的作用; (3)T d =2,并考虑实际继电器有延迟时系统的运动。 8-2 设三个非线性系统的非线性环节一样,其线性部分分别为 (1)1 ();(0.11) G s s s = + (2)2 ();(1)G s s s = + (3)2(1.51) ()(1)(0.11) s G s s s s += ++ 用描述函数法分析时,哪个系统分析的准确度高。 8-3某单位反馈系统,其前向通路中有一描述函数4 ()j e N A A π-=的非线性元件, 线性部分的传递函数为15 ()(0.51) G s s s =+,试用描述函数法确定系统是否存在 自振?若有,参数是多少? 8-4已知非线性系统的结构图如图8-2所示,图中非线性环节的描述函数 6 ()(0),2 A N A A A +=>+试用描述函数法确定: 图8-2 (1)使该非线性系统稳定,不稳定以及产生周期运动时,线性部分的k 值范围; (2)判断周期运动的稳定性,并计算稳定周期运动的振幅和频率。 8-5非线性系统如图8-3所示,试用描述函数法分析周期运动的稳定性,并确定系统输出信号振荡的振幅和频率。
图8-3 8-6试用描述函数法说明图8-4所示系统必然存在自振,并确定c 的自振振幅和频率,画出c,x,y 的稳态波形。 图8-4 8-7某线性系统的结构图如图8-5所示,试分别绘制下列三种情况时,变量e 的相轨迹,并根据相轨迹分别作出相应的e(t)曲线。 图8-5 (1)J=1,K 1=1,K 2=2,初始条件e(0)=3, (0)0;(0)1,(0) 2.5e e e ===- ; (2)J=1,K 1=1,K 2=0.5,初始条件e(0)=3, (0)0;(0)3,(0)0e e e ==-= ; (3)J=1,K 1=1,K 2=0,初始条件e(0)=1, (0)1;(0)0,(0)2e e e === ; 8-8设一阶非线性系统的微分方程为3x x x =-+ 试确定系统有几个平衡状态,分析各平衡状态的稳定性,并作出系统的相轨迹。 8-9试确定下列方程的奇点及类型,并用等倾线法绘制它们的相平面图: (1)||0x x x ++= ; (2)0x x sign x ++= ; (3)0x sin x += ;
层次分析法建模 层次分析法(AHP-Analytic Hierachy process)---- 多目标决策方法 70 年代由美国运筹学家T·L·Satty提出的,是一种定性与定量分析相结合的多目标决策分析方法论。吸收利用行为科学的特点,是将决策者的经验判断给予量化,对目标(因素)结构复杂而且缺乏必要的数据情况下,採用此方法较为实用,是一种系统科学中,常用的一种系统分析方法,因而成为系统分析的数学工具之一。 传统的常用的研究自然科学和社会科学的方法有: 机理分析方法:利用经典的数学工具分析观察的因果关系; 统计分析方法:利用大量观测数据寻求统计规律,用随机数学方法描述(自然现象、 社会现象)现象的规律。 基本内容:(1)多目标决策问题举例AHP建模方法 (2)AHP建模方法基本步骤 (3)AHP建模方法基本算法 (3)AHP建模方法理论算法应用的若干问题。 参考书:1、姜启源,数学模型(第二版,第9章;第三版,第8章),高等教育出版社 2、程理民等,运筹学模型与方法教程,(第10章),清华大学出版社 3、《运筹学》编写组,运筹学(修订版),第11章,第7节,清华大学出版社 一、问题举例: A.大学毕业生就业选择问题 获得大学毕业学位的毕业生,“双向选择”时,用人单位与毕业生都有各自的选择标准和要求。就毕业生来说选择单位的标准和要求是多方面的,例如: ①能发挥自己的才干为国家作出较好贡献(即工作岗位适合发挥专长); ②工作收入较好(待遇好); ③生活环境好(大城市、气候等工作条件等); ④单位名声好(声誉-Reputation); ⑤工作环境好(人际关系和谐等) ⑥发展晋升(promote, promotion)机会多(如新单位或单位发展有后劲)等。 问题:现在有多个用人单位可供他选择,因此,他面临多种选择和决策,问题是他将如何作出决策和选择?——或者说他将用什么方法将可供选择的工作单位排序?
2.3总平面布置及竖向布置 2.3.1总平面布置及分析 功能分区:该项目厂区呈近似矩形,在厂区西侧设置有两个出入口,分别位于厂区西南侧和西北侧,西北侧为人流出入口、西南侧为货流出入口。整个厂区分为办公区、生产区、仓储区和公用辅助生产区,仓储区集中布置。办公区靠近人流出入口,仓储区靠近物流出入口,总变配电靠近厂区边缘,公用辅助设施靠近负荷中心。厂区功能分区明确,符合《化工企业总图运输设计规范》(GB 50489-2009)、《工业企业总平面设计规范》(GB50187-2012)和《工业企业设计卫生标准》(GBZ 1-2010)的规定。 总平面布局:本项目生产装置位于厂区的东北部,办公、仓储及公用辅助工程依托公司原有设施。该项目所在地全年最小频率风为西南西,夏季最大频率风为东南。 生产设施:生产区位于厂区的东北部,与厂区内其他生产装置集中布置,生产装置露天布置,位于地势开阔、通风良好的地段,易于有毒有害物质的扩散。但是未布置在当地全年最小频率风的上风侧,不符合《工业企业设计卫生标准》(GBZ 1-2010)第5.2.1.4条和《工业企业总平面设计规范》(GB50187-2012)第5.2条的规定。企业应采取职业卫生防护设施以降低职业危害的发生,本报告在第***章提出对策措施和建议。 公用设施:总降压变电所位于厂区*****侧5.3.2;压缩空气站布置在厂区*****侧5.3.4;煤气站和天然气站位于厂区*****侧5.3.6;锅炉房位于厂区*****侧5.3.7,位于厂区全年最小频率风的上风向;循环水系统位于厂区*****侧5.3.9;污水处理站位于厂区*****侧5.3.10,位于厂区全年最小频率风的上风向;化验室位于厂区*****侧5.3.11;控制室位于****,维修车间位于厂区*****侧5.4。综上所述,该项目的公用辅助设施的布局符合或不符合《工业企业总平面设计规范》(GB50187-2012)第5.3条、5.4条的规定。 运输设施:参照以上描述,按照第5.5条的规定判定。 仓储设施:该项目依托的仓储区位于厂区西南侧,位于全年最小
第 1 页 实验十一 非线性系统的相平面分析 一、实验目的 (1)掌握非线性系统的模拟方法。 (2)用相平面分析法分析继电型非线性系统、饱和型非线性系统的瞬态响应和稳态误差。 二、实验设备 序 号 型 号 备 注 1 DJK01 电源控制屏 该控制屏包含“三相电源输出”等几个模块。 2 DJK15控制理论实验挂箱 或DJK16控制理论实验挂 箱 3 慢扫描示波器 4 万用表 三、实验线路及原理 相平面法是分析一阶和二阶非线性系统的有效方法。通过作出的相轨迹,就能直观的知道系统的运动情况。 图11-1 非线性控制系统
第 2 页 图11-2 理想继电器特性的模拟线路图 图11-1为一具有理想继电器特性的非线性系统的框图,图11-2为理想继电器特性的具体接线参考图。由图11-1得 Km C C =+。 。。 ,0, 0m e m m e >?=??=?+e KM C C e KM C C 令 r(t) = R,则 r(t)=0。因为 r –c =e, 所以e = -c 。于是上式改写为 ) ,(),(。。。。。。0000<=?+>=++e KM e e e KM e e
第 3 页 初始条件 e(0)= r(0)- c(0)=R ,用等倾线法作出该系统的相轨迹如图11-3所示。由图可见,系统从初始点A 出发,最后运动到坐标原点。这不仅表明该系统稳定,而且由图还能确定系统的超调量δ%=0F/0A ×100%。和稳定误差为零等性能指标。 图11-3 四、思考题 (1)实验中如何获得c 和c 的信号?如何获得e 和e 的信号? (2)试说明e ?e 相轨迹和c ?c 相轨迹间的关系。 (3)你是如何从相平面图上得到超调量σρ和稳态误差ess 的? 五、实验方法 (1)用相轨迹分析图8-54所示的具有理想继电器特性的非线性系统在阶跃信号作用下的瞬态响应和稳态误差。 ①根据图8-54设计相应的实验线路图,其中M=5V,K=1。 ②在系统的输入分别为3V 和1V 时,用示波器观察系统e ?e
1 1.微分方程的定义 对于duffing 方程03 2 =++x x x ω ,先将方程写作??? --==3 1122 21x x x x x ω function dy=duffing(t,x) omega=1;%定义参数 f1=x(2); f2=-omega^2*x(1)-x(1)^3; dy=[f1;f2]; 2.微分方程的求解 function solve (tstop) tstop=500;%定义时间长度 y0=[0.01;0];%定义初始条件 [t,y]=ode45('duffing',tstop,y0,[]); function solve (tstop) step=0.01;%定义步长 y0=rand(1,2);%随机初始条件 tspan=[0:step:500];%定义时间范围 [t,y]=ode45('duffing',tspan,y0); 3.时间历程的绘制 时间历程横轴为t ,纵轴为y ,绘制时只取稳态部分。 plot(t,y(:,1));%绘制y 的时间历程 xlabel('t')%横轴为t ylabel('y')%纵轴为y grid;%显示网格线
2 axis([460 500 -Inf Inf])%图形显示范围设置 4.相图的绘制 相图的横轴为y ,纵轴为dy/dt ,绘制时也只取稳态部分。红色部分表示只取最后1000个点。 plot(y(end-1000:end ,1),y(end-1000:end ,2));%绘制y 的时间历程 xlabel('y')%横轴为y ylabel('dy/dt')%纵轴为dy/dt grid;%显示网格线 5.Poincare 映射的绘制 对于不同的系统,Poincare 截面的选取方法也不同 对于自治系统一般每过其对应线性系统的固有周期,截取一次 对于非自治系统,一般每过其激励的周期,截取一次 例程:duffing 方程03 2=++x x x ω 的poincare 映射 function poincare(tstop) global omega; omega=1; T=2*pi/omega;%线性系统的周期或激励的周期 step=T/100;%定义步长为T/100 y0=[0.01;0];%初始条件 tspan=[0:step:100*T];%定义时间范围 [t,y]=ode45('duffing',tspan,y0); for i=5000:100:10000%稳态过程每个周期取一个点 plot(y(i,1),y(i,2),'b.'); hold on;% 保留上一次的图形 end xlabel('y');ylabel('dy/dt');
施工平面图布置合理性分析——工艺实习调查报告 班级:工程造价0604 姓名:刘晓慧 学号:076102411 日期:2008-6-20 指导老师:张挺拯蔡彬清
施工平面图布置合理性分析 一、理论分析 单位工程施工平面图是对一个建筑物或构筑物施工现场的平面规划和布置图。它是根据工程规模、特点和施工现场的条件,按照一定的设计原则,来正确地解决施工期间所需要的各种暂设工程和其他业务设施等同永久性建筑物和拟建工程之间的合理位置关系。它是单位工程施工组织设计的主要组成部分,是施工准备工作一项重要的内容,是进行施工现场布置的依据,是实现施工现场又组织、有计划进行文明施工的先决条件。贯彻和执行合理的施工平面布置图,会使施工现场井然有序,施工顺利进行,保证进度,提高效率和经济效果。反之,则造成不良后果。单位工程施工平面图的绘制比例一般为1:200~1:500。 (一)、设计内容 施工平面图的设计内容主要包括: 1.建筑物总平面图上已建和拟建的地上地下的一切房屋、构筑物以及道路和各种管线等其他设施的位置和尺寸。 2.测量放线标桩位置、地形等高线和土方取弃点。 3.自行式起重机开行路线,轨道布置和固定式垂直运输设备位置。 4.各种加工厂、搅拌站的位置;材料、半成品、构件及工业设备等的仓库和堆场。 5.生产和生活性福利设施的布置。 6.场内道路的布置和引入的铁路、公路和航道位置。 7.临时给排水管线、供电线路、蒸汽及压缩空气管道等布置。 8.一切安全及防火设施的位置。 (二)、设计依据 设计施工平面图所依据的资料主要有: 1.建筑、结构设计和施工组织设计时所依据的有关拟建工程的当地原始资料(1)自然条件调查资料:气象、地形、水文地质及工程资料。 (2)技术经济调查资料:交通运输、水源、电源、物资资料、生产和生活基地情况。 2.建设工程设计资料 (1)建设工程总平面图。 (2)一切已有和拟建的地下、地上管道位置。 (3)建设工程区域的竖向设计和土方平衡图。 3.施工资料 (1)单位工程施工进度计划。 (2)施工方案。 (3)各种材料、构件、半成品等需要量计划。 (三)、设计原则 1.在保证施工顺利进行的前提下,现场布置尽量紧凑、节约用地。 2.合理布置施工现场的运输道路及各种材料堆场、加工厂、仓库位置、各种机具的位置,尽量使运输距离最短,从而减少或避免为二次搬运。
教你做总平面效果图 总平面图是投标中的第一张表现图,作用与性质不用说了吧,应该认真点画。 一. 在ps中打开文件! 从cad中导入的是位图文件,但是一般情况下这只是一幅彩色稿。 无论是bmp还是tif文件,我一般习惯用转换格式的方式改变为黑白格式,这样转换可以保持精度,其他的转换方式多多少少都会有点损失。:) 1.先转换为gray模式。 2.在gray模式中调整对比度,调到最大。 3.再转换回RGB模式。 好了,一幅黑白稿出现了!
二. 分离图线。有些人可能喜欢不分。我习惯分离图线层,因为这样好处有如下: 1.所有的物体可以在图线下面来做,一些没有必要做的物体可以少做或不做。节省了很多时间。 2.物体之间的互相遮档可以产生一些独特的效果! 3.图线可以遮挡一些物体因选取不准而产生的错位和模糊,使边缘看起来很整齐,使图看起来很美。
具体步骤是以colour range 选取方式选中白色,删除。现在图线是单独的一层了。把这层命名为图线层。 三. 分离成功。为了观察方便可以在图线后增加一层填充为白色,当然也可直接填充绿色变草地层,白色的好处是画超级大平面图的时候会比较容易了解自己的进度 从现在开始,我每个新增加的图层都会命名。原因:
1.个人习惯。 2. 可以有效防止产生大量无用的废层和无物体层(即空层)。 3. 方便别人,将来别人修改你的图能够很轻松地找到每个物体。 四. 种树。现在开始栽树。 需要说明的是,通常我都习惯最后种树,因为树木通常是位图导入,大量的复制会占用机器的内存。这幅图例外,先种树,是因为这张图既要表现建筑又要表现绿化和景观。先种树可以定下整个图的整体颜色倾向,基调。 先种树,大小植物,再调他们的色彩倾向,你认为应该调什么色调完全凭个人的感觉啦。 这张图定的基调是偏黄绿色调的暖灰。
Matlab 信号处理工具箱 谱估计专题 频谱分析 Spectral estimation (谱估计)的目标是基于一个有限的数据集合描述一个信号的功率(在频率上的)分布。功率谱估计在很多场合下都是有用的,包括对宽带噪声湮没下的信号的检测。 从数学上看,一个平稳随机过程n x 的power spectrum (功率谱)和correlation sequence (相关序列)通过discrete-time Fourier transform (离散时间傅立叶变换)构成联系。从normalized frequency (归一化角频率)角度看,有下式 ()()j m xx xx m S R m e ωω∞ -=-∞ = ∑ 注:()() 2 xx S X ωω=,其中()/2 /2 1 lim N j n n N n N X x e N ωω→∞=-=∑ πωπ-<≤。其matlab 近似为X=fft(x,N)/sqrt(N),在下文中()L X f 就是指matlab fft 函数的计算结果了 使用关系2/s f f ωπ=可以写成物理频率f 的函数,其中s f 是采样频率 ()()2/s jfm f xx xx m S f R m e π∞ -=-∞ = ∑ 相关序列可以从功率谱用IDFT 变换求得: ()()()/2 2//2 2s s s f jfm f j m xx xx xx s f S e S f e R m d df f πωπ π ωωπ--= =? ? 序列n x 在整个Nyquist 间隔上的平均功率可以表示为 ()()() /2 /2 02s s f xx xx xx s f S S f R d df f π π ωωπ- -= =?? 上式中的
1.含有死区继电器特性的非线性系统框图如图2-1所示。 图2-1 系统框图 系统中非线性部分的输入输出关系为: 非线性部分的输入与输出关系可用下式表示: 试用等倾线法绘制其相轨迹。 解:
首先在图2-2中设q为不同值时画出一系列等倾线。在每条等倾线上按q值求出α=arctan q,并按该倾角画出短线短。相轨迹应以该斜率穿过等倾线。如果系统外部输入为r=0,在初始状态x1(0)=3情况下,其相轨迹如图2-2所示。由图可见,在给定条件下,x是单调衰减的。由于存在死区非线性特性,x1不能衰减到0,存在稳态误差。 图2-2 用等倾线法绘制图2-1所示系统的相轨迹 2.如图2-3所示,非线性控制系统,在t=0时,加上一个幅度为6的阶跃输入, 图2-3 继电控制系统
系统的初始状态为e(0)=6,e(0)=0,问系统经过多长时间可到达原点。 图2-4 继电控制系统的相轨迹 3.试分析图2-5所示具有摩擦阻力的系统。图中F f表示摩擦阻力,它包括 图2-5 系统框图
或 在图2-6中画出了当系统参量为K=1.25,f c=0.25,f v=0.25时的相轨迹。 图2-6 图2-5系统的相轨迹
图2-5所示系统的稳定性没有问题,但稳态误差可能比较大,也就是要求系统总是最终收敛到状态平面的原点是难于做到的。在实际中,对于具有干摩擦非线性的系统,为提高稳态精度,可用反复加入微小的正、负输入信号,以克服由于干摩擦带来的稳态精度不高的缺点。 4.非线性控制系统如图2-7所示,令K=1。讨论下面情况下的e-e相轨迹:当输入信号为阶跃信号r(t)=R,系统的初始状态为0。 图2-7 系统框图 解:首先根据控制系统框图,设法得到各分区的线性方程。由 得到:;将代入方程,有:
clc clear all; format long; Ns=1000; order=13; ! %**********************read the position and flux density************************ fid=fopen('','r'); %open the original file fidnew = fopen('','w'); %write the new file while feof(fid)==0 > tline = fgetl(fid); %tline if ~ischar(tline), break, end temp=abs(tline); Nlength=length(tline); isemptyline=0; % { if Nlength==0 isemptyline=1; end allspace=0; % 、 isspace=0; for i=1:Nlength T=temp(i); if T==32 isspace=isspace+1; % end if isspace==Nlength allspace=1; break end < end findalpha=0; % for j=1:Nlength T=temp(j); ! if ((T>=65)&(T>=90))|((T>=97)&(T>=122)) findalpha=1;
break; end end ) if (~findalpha)&(~allspace)&(isemptyline==0) % fprintf(fidnew,tline); fprintf(fidnew,'\n'); end - end fclose(fid); fclose(fidnew); fid1=fopen('','r'); · flux_position =fscanf(fid1,'%f',[2,Ns]); fclose(fid1); %********************************read file finish***************************************** flux_position=flux_position'; pos1=flux_position(:,1); { pos_delta=pos1(2); pos_length=length(pos1); pos_last=pos1(pos_length); for i=1:1:pos_length %copy and get another part of position pos2(i)=pos_last+i*pos_delta; ( end pos1=pos1'; flux1=flux_position(:,2); flux2=-flux_position(:,2); pos=[pos1,pos2];%combine and get all part of position > flux1=flux1'; flux2=flux2'; flux=[flux1,flux2];%combine and get all part of flux density value figure; plot(pos1,flux1,'r');%plot origional waveform " hold on; grid on; fft1=fft(flux,Ns);
7-4 相 轨 迹 一、相轨迹的概念 设二阶系统可以用下列常微分方程描述 ),(x x f x = 或 ),(x x f dt x d = 式中),(x x f 一般是x 和x 的非线性函数。该系统的时域解,可以用x 与t 的关系曲线来表示。也可把时间t 作为参 变量,用x 与x 之间的关系曲线来表示。下面以线性二阶系统为例加以说明。 设线性二阶系统如图7-34(a)所示,其单位阶跃响应及其导数如图7-34(b)所示。即可把系统的阶跃响应 用图7-34(c)所示的x 与x 之间的关系曲线来描述,由图可见,x x -曲线同样很直观地表示了系统的运动特性。从某种意义上来说,甚至比)(t x 曲线更形象,可获得更多的信息。 显然,如果把方程),(x x f x =看作是一个质点运动方程,用x 表示质点的位置,那么x 就表示质点的运动速度。用x 和x 描述方程的解,也就是用质点的“状态”(位置和速 度)来表示该质点的运动。在物理学中,这种不直接用时间变量而用状态变量来描述运 动的方法称为相空间方法,也称为状态空间法。在自动控制理论中,把具有直角坐标x x -的平面称为相平面。相平面是二维的状态空间(平面),相平面上的每个点对应着系统的 一个运动状态,这个点就称为相点。相点随时间t 的变化在x x -平面上描绘出的轨迹线,表征了系统运动状态(相)的演变过程,这种轨迹称为相轨迹。对于二阶系统,它的状态变量只有两个,所以二阶系统的运动可在相平面上表示出来。对于三阶系统,它有三个状态变量,必须用三维空间来描述其相迹,这就比较困难了。对于三阶以上的系统,要作其相轨迹就更加困难;然而原则上可以将二维空间中表示点运动的概念扩展到n 维空间去。 相平面法是一种用图解求下列两个联立一阶微分方程组的方法。首先把二阶常微分运动方程 ),(x x f x = 改写成两个联立一阶微分方程,令1x x =,21x x =? 则有
建 筑 总 平 面 分 析 指导老师:蔡家伟 组员:贾镔培张超慧常丽萧 时泳王倩
建筑总平面分析 建筑面图主要表示整个建筑基地的总体布局,具体表达新建房屋的位置、朝向以及周围环境(原有建筑、交通道路、绿化、地形)基本情况的图样。 一,建筑总平面的组成元素。 建筑总平面它包括场地分区,实体布局,交通安排,绿地布置,从宏观上进行大块安排,是总平面设计的核心工作,它确定了各构成元素的各自形态以及元素之间的相互关联,确定了整个场地的基本形态。这是我们作为建筑师所必须了解的,这样我们才能去处理好各个元素之间的关系,从各个方面来权衡建筑的可
行性。而我们从细节来说总平面时:.1、表明新建区的总体布局:用地范围、各建筑物及构筑物的位置(原有建筑、拆除建筑、新建建筑、拟建建筑)、道路、交通等的总体布局。 2、确定新建建筑物的平面位置:(1)根据原有房屋和道路定位若新建房屋周围存在原有建筑、道路,此时新建房屋定位是以新建房屋的外墙到原有房屋的外墙或到道路中心线的距离。二,建筑总平面 1,建筑总平面与环境的关系: 过去的总平面设计是以功能为主的设计,整个设计区内就是单调的房屋排列和必要的交通条件,即使在民用项目中考虑到人们的居住条件和服务设施,也都是停留在低层次的生活标准,随着人民生活水平的逐步提高,人们对生活质量的要求也越来越高,因此我们在设计中除了考虑房屋排列满足地方规定的间距,保证房屋的日照、通风条件外,还要考虑对环境的要求及良好的服务功能,例如:漫步、休憩、晒太阳、遮阴、聊天等户外活动场所。1.工业建筑是以生产功能为主进行设计,过去只讲生产要素,现代己不能满足了,因此设计时也要注意环境设计,建设无污染、环境优美的园林化的工厂。特别在厂前区和生活区,也与民用建筑一样要求绿化,美化。致于公共建筑,更要从人性化出发,针对各种不同的公共建筑创造设计出注重城市趣味性,与城市景观相呼应,建筑艺术与环境的协调的建筑作品。对住宅区的环境设计则更有很多文章可作,主要可根据小区的地形地貌进
·· 1.微分方程的定义 对于duffing 方程03 2 =++x x x ω ,先将方程写作??? --==3 1122 21x x x x x ω function dy=duffing(t,x) omega=1;%定义参数 f1=x(2); f2=-omega^2*x(1)-x(1)^3; dy=[f1;f2]; 2.微分方程的求解 function solve (tstop) tstop=500;%定义时间长度 y0=[0.01;0];%定义初始条件 [t,y]=ode45('duffing',tstop,y0,[]); function solve (tstop) step=0.01;%定义步长 y0=rand(1,2);%随机初始条件 tspan=[0:step:500];%定义时间范围 [t,y]=ode45('duffing',tspan,y0); 3.时间历程的绘制 时间历程横轴为t ,纵轴为y ,绘制时只取稳态部分。 plot(t,y(:,1));%绘制y 的时间历程 xlabel('t')%横轴为t ylabel('y')%纵轴为y grid;%显示网格线 axis([460 500 -Inf Inf])%图形显示范围设置 4.相图的绘制 相图的横轴为y ,纵轴为dy/dt ,绘制时也只取稳态部分。红色部
·· 分表示只取最后1000个点。 plot(y(end-1000:end,1),y(end-1000:end,2));%绘制y 的时间历程 xlabel('y')%横轴为y ylabel('dy/dt')%纵轴为dy/dt grid;%显示网格线 5.Poincare 映射的绘制 对于不同的系统,Poincare 截面的选取方法也不同 对于自治系统一般每过其对应线性系统的固有周期,截取一次 对于非自治系统,一般每过其激励的周期,截取一次 例程:duffing 方程03 2=++x x x ω 的poincare 映射 function poincare(tstop) global omega; omega=1; T=2*pi/omega;%线性系统的周期或激励的周期 step=T/100;%定义步长为T/100 y0=[0.01;0];%初始条件 tspan=[0:step:100*T];%定义时间范围 [t,y]=ode45('duffing',tspan,y0); for i=5000:100:10000%稳态过程每个周期取一个点 plot(y(i,1),y(i,2),'b.'); hold on;% 保留上一次的图形 end xlabel('y');ylabel('dy/dt'); Poincare 映射也可以通过取极值点得到 function poincare(tstop) y0=[0.01;0]; tspan=[0:0.01:500]; [t,y]=ode45('duffing',tspan,y0); count=find(t>100);%截取稳态过程 y=y(count,:); n=length(y(:,1));%计算点的总数
7.2 相平面法 相平面法是Poincare. H 于1885年首先提出来的,它是求解一、二阶线性或非线性系统的一种图解法,可以用来分析系统的稳定性、平衡位置、时间响应、稳态精度以及初始条件和参数对系统运动的影响。 7.2.1 相平面的基本概念 1.相平面、相轨迹 设一个二阶系统可以用常微分方程 0),(=+x x f x &&& (7-5) 来描述。其中是),(x x f &x 和的线性或非线性函数。在非全零初始条件(,)或输入作用下,系统的运动可以用解析解和描述。 x &0x 0x &)(t x )(t x &取x 和构成坐标平面,称为相平面,系统的每一个状态均对应于该平面上的一点。当变化时,这一点在x &t x -平面上描绘出的轨迹,表征系统状态的演变过程,该轨迹就叫做相轨迹,如图7.8(a) 所示。 x & 图7-8 相轨迹 2.相平面图 相平面和相轨迹曲线簇构成相平面图。相平面图清楚地表示了系统在各种初始条件或输入作用下的运动过程,可以用来对系统进行分析和研究。 7.2.2 相轨迹的性质 1.相轨迹的斜率 相轨迹在相平面上任意一点处的斜率为 ),(x x &
d d d (,d d d )?== &&&&x x t f x x x x t x (7-6) 只要在点处不同时满足和),(x x &0=x &0),(=x x f &,则相轨迹的斜率就是一个确定的值。这样,通过该点的相轨迹不可能多于一条,相轨迹不会在该点相交。这些点是相平面上的普通点。 2.相轨迹的奇点 相平面上同时满足和0=x &0),(=x x f &的点处,相轨迹的斜率 d (,)d 00?==&&&x f x x x x 即相轨迹的斜率不确定,通过该点的相轨迹有一条以上。这些点是相轨迹的交点,称为奇点。 显然,奇点只分布在相平面的x 轴上。由于在奇点处,0==x x &&& ,故奇点也称为平衡点。 3.相轨迹的运动方向 相平面的上半平面中,,相迹点沿相轨迹向0>x &x 轴正方向移动,所以上半部分相轨迹箭头向右;同理,下半相平面0 相平面法例题解析 x x 2x s x =1 x sx =x 2s x =1s x ※稳定焦点 不稳定焦点 1s 2 中心点 x x 2x s x =1x s x =220 n n x x x ζωω+-= 2 20n n x x x ζωω++=例已知线性系统的运动方程0=++e b e a e ,分别给出系统在相平面中具有(a)稳定焦点和(b)鞍点时,参数a 和b 的取值范围。 解:由方程求出两根为1,2 s = (a)稳定焦点10<<ζ,系统具有一对负实部共轭复根,0>a 、b a 42 <且0>b ; (b)鞍点,系统具有符号相反的两个实极点0 subplot(2,2,1) x=0.578;c=0.5; hold on; for k=1:60 x y=c*x*(1-x); y plot(x,y,'bd') title('研究一般迭代公式的复杂行为混沌现象') x=y; k=k+1 end subplot(2,2,2) x=0.578;c=1.5; hold on; for k=1:60 x y=c*x*(1-x); y plot(x,y,'g*') title('研究一般迭代公式的复杂行为混沌现象') x=y; k=k+1 end subplot(2,2,3) x=0.578;c=2.5; hold on; for k=1:60 x y=c*x*(1-x); y plot(x,y,'k+') title('研究一般迭代公式的复杂行为混沌现象') x=y; k=k+1 end subplot(2,2,4) x=0.578;c=4; hold on; for k=1:60 x y=c*x*(1-x); y plot(x,y,'ro') title('研究一般迭代公式的复杂行为混沌现象') x=y; k=k+1 end x = 0.5780 y = 0.1220 k = 2 x = 0.1220 y = 0.0535 k = 3 x = 0.0535 y = 0.0253 k = 4 x = 0.0253 y = 0.0123 k = 5 x = 0.0123 y = 0.0061 k = 6 x = 0.0061 y = 0.0030 k = 7 x = 0.0030 y = 0.0015 k = 8 x = 0.0015 y = 7.5413e-004 k = 9 x = 7.5413e-004 y = 7-5 非线性控制系统的相平面分析法 相平面法在分析非线性系统时是很有用处的。但是,我们在介绍非线性系统的分析方法之前,先讨论一下相平面法在分析线性二阶系统中的应用是很有好处的。因为许多非线性元件特性一般都可分段用线性方程来表示,所以非线性控制系统也可以用分段线性系统来近似。 一、线性控制系统的相平面分析 1、阶跃响应 设线性二阶控制系统如图7-38所示。若系统开始处于平衡状态。试求 系统在阶跃函数)(1)(0t R t r ?= 作用下,在e e -平面上的相轨迹。 建立系统微分方程式,由图示系统可得 Ke c c T =+ 因为c r e -=,代入上式得 r r T Ke e e T +=++ (7-31) 对于->?=0),(1)(0t t R t r 时,0)()(==t r t r 因此上式可写成 0=++Ke e e T (7-32) 方程(7-32)与(7-22)式相仿。因为假设系统开始处于平衡状态,所以误差信号的初始条 件是0)0(R e =和0)0(=e 。e e -平面上的相轨迹起始于)0,(0R 点,而收敛于原点(系统的奇点)。当系统特征方程的根是共轭复数根,并且位于左半平面时,其相轨迹如图7-39(a) 所示。根据e e -平面上的相轨迹就可方便的求得c c -平面上系统输出的相轨迹,如图7-39(b)所示。由图7-39可见,欠阻尼情况下系统的最大超调量P σ及系统在稳态时的误差 为零。因为e e -平面相轨迹最终到原点,即奇点;所以在c c -平面上相轨迹最终到达0R c =的稳态值,则奇点坐标为)0,(0R 。 2、斜坡响应 对于斜坡输入t V t r 0)(=;当0>t 时,)(t r 的导数0)(V t r = 及0)(=t r 。因此,方程(7-31)可以写成 0V Ke e e T =++ 或 0)(0=-++K V e K e e T 令v e K V e =-0,代入上式,则有 0V Ke e e T =++ννν (7-33) 在v v e e -平面上,方程(7-33)给出了相平面图与在e e -平面上方程(7-32)给出的相平面图是相同的。 应当指出,特征方程式的根确定了奇点的性质,在v v e e -平面上的奇点的位置是坐标原点,而在e e -平面上奇点坐标为)0,(0K V 点。又因为我们假设系统初始状态为平衡状态。相平面法例题解析相平面法例题超详细步骤解析
数字分析 matlab程序
非线性控制系统的相平面分析法
相关主题
文本预览