雷赛步进电机专用行星减速机、欧姆龙伺服电机专用行星减速机特点:为同轴式方形法兰输出,具有精度高、钢性好、承载能力大、效率高、寿命长、噪音低、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。适合于全球任何厂商所制造的驱动产品连接.
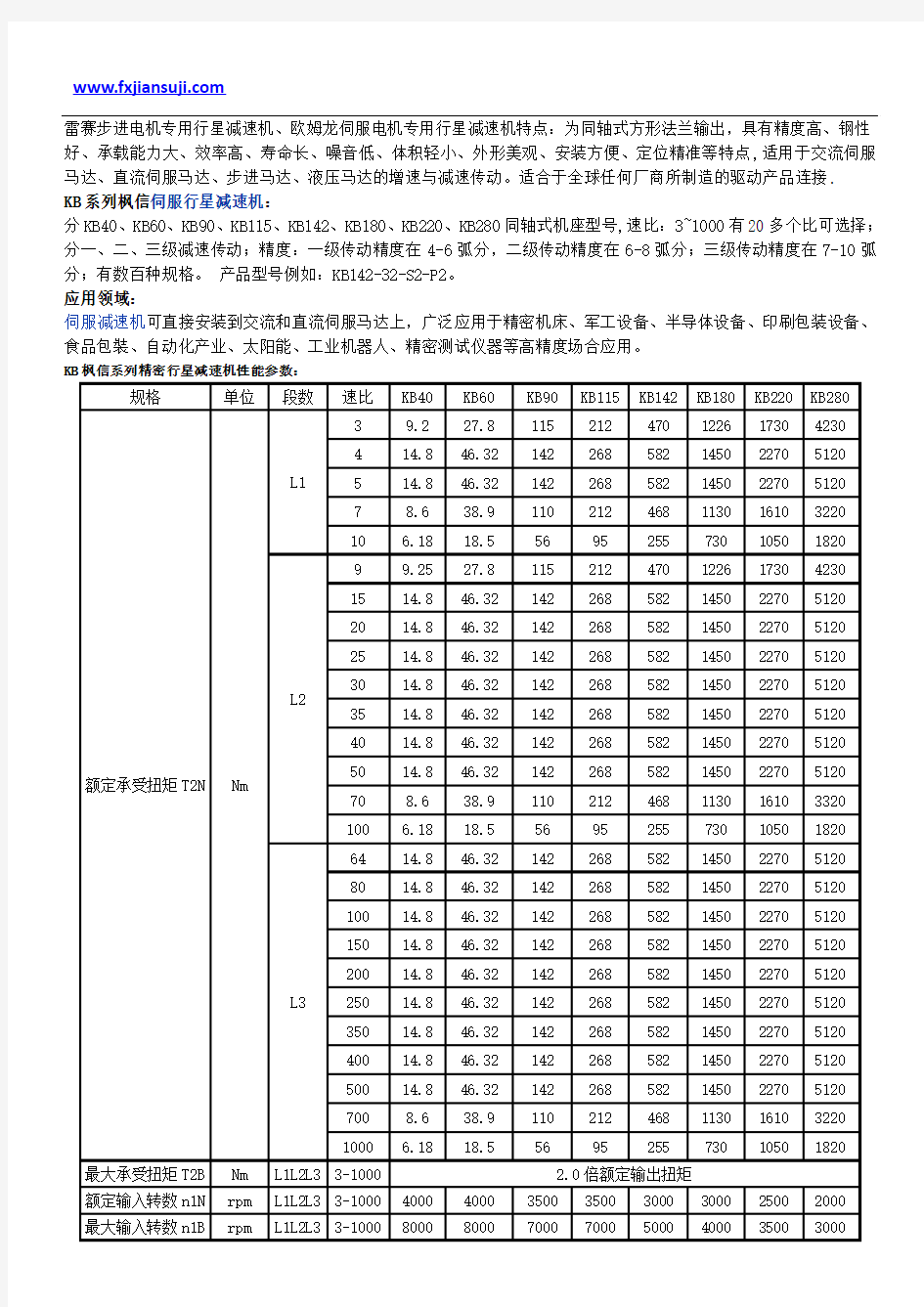
KB系列枫信伺服行星减速机:
分KB40、KB60、KB90、KB115、KB142、KB180、KB220、KB280同轴式机座型号,速比:3~1000有20多个比可选择;分一、二、三级减速传动;精度:一级传动精度在4-6弧分,二级传动精度在6-8弧分;三级传动精度在7-10弧分;有数百种规格。产品型号例如:KB142-32-S2-P2。
应用领域:
伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于精密机床、军工设备、半导体设备、印刷包装设备、食品包裝、自动化产业、太阳能、工业机器人、精密测试仪器等高精度场合应用。
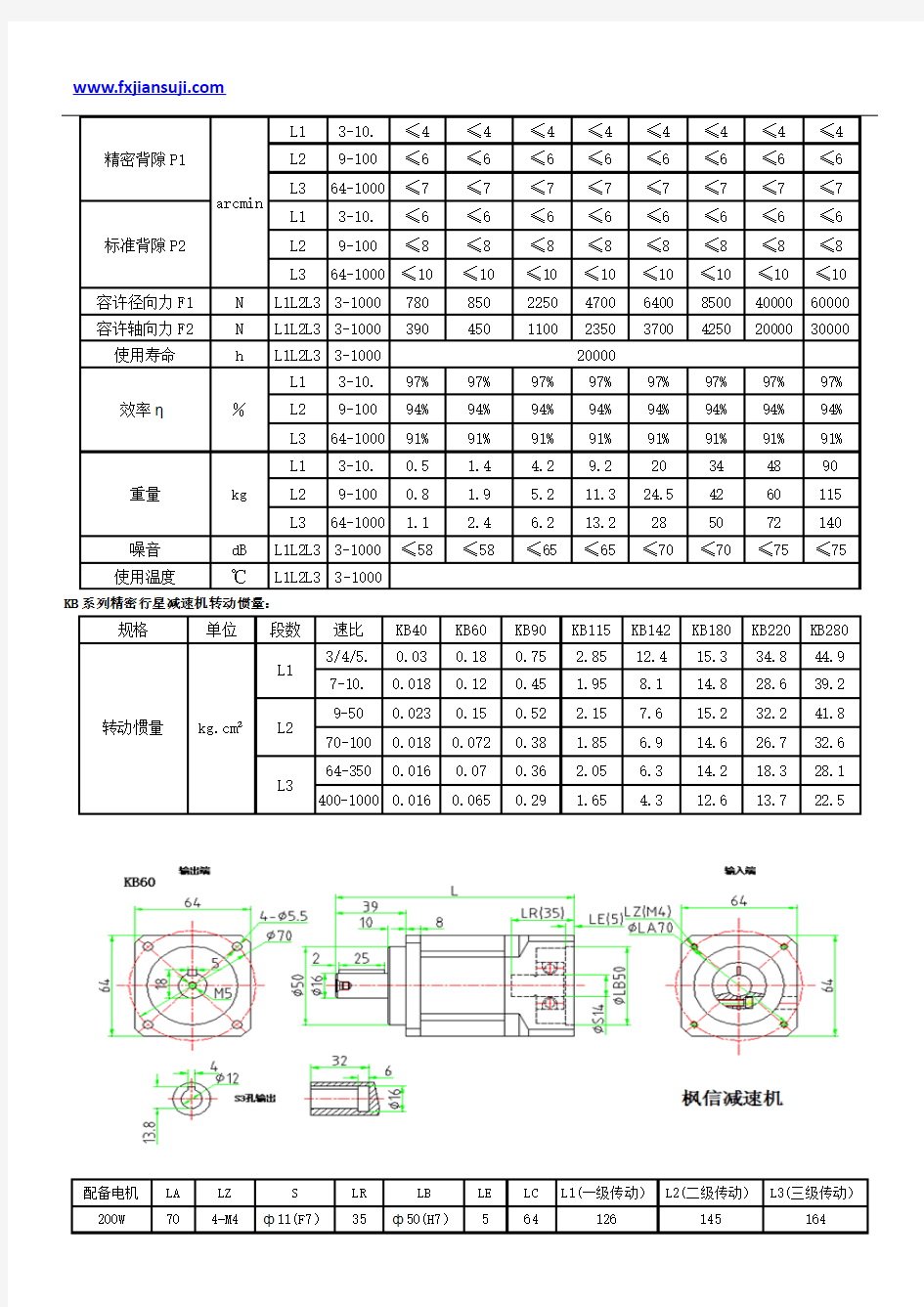
KB枫信系列精密行星减速机性能参数:
KB系列精密行星减速机转动惯量:
配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 280 326 372 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 305 351 397 4000W 215 4-M12 38/42(F7) 115 180(H7) 10 190 325 371 417
配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 320 368 413 4200W 215 4-M12 38/42F7 115 180H7 10 188 340 388 433 7500W 235 4-M12 55F7 120 200H7 10 220 342 390 435
配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 362 425 470 4200W 215 4-M12 38/42F7 116 180H7 10 188 362 425 470 7500W 235 4-M12 55F7 116 200H7 10 220 392 425 470 11000W 265 4-M12 55F7 116 230H7 10 250 392 425 470
配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)4200W 215 4-M12 38/42F7 116 180H7 10 188 400 488 568 7500W 235 4-M12 55F7 116 200H7 10 220 400 488 568 11000W 265 4-M12 55F7 116 230H7 10 250 400 488 568 15000W 300 4-M12 60F7 140 250H7 10 285 430 520
什么是步进电机 步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。 虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。 目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。仅仅处于一种盲目的仿制阶段。这就给用户在产品选型、使用中造成许多麻烦。签于上述情况,我们决定以广泛的感应子式步进电机为例。叙述其基本工作原理。望能对广大用户在选型、使用、及整机改进时有所帮助。 二、感应子式步进电机工作原理 (一)反应式步 进电机原理 由于反应式步进电机工作原理比较简单。下面先叙述三相反应式步进电机原理。 1、结构: 电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。 0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B 与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图: 2、旋转: 如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。 如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。 如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。 如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て 这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电机就每步(每脉冲)1/3て,向右旋转。如按A,C,B,A……通电,电机就反转。 由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。而方向由导电顺序决定。
通用桥式起重机 标准号:GB/T14405-1993 替代标准号:JB1036-1928 发布单位:国家技术监督局发布 起草单位:大连起重机器厂负责起草;北京起重运输机械研究所、太原重型机器厂、上海起重运输机械厂 发布日期: 实施日期: 点击数:1451 更新日期:2008年10月05日 1主题内容与适用范围 本标准规定了通用桥式起重机的分类、技术要求、实验方法及检验规则等内容。 本标准适用于在一般环境中工作的双梁通用桥式起重机(以下简称起重机),其取物装置为吊钩、抓斗或电磁吸盘(起重电磁铁),或同时用其中二种或三种。专用桥式起重机中相同或类似的部分亦可参照使用。 2引用标准 GB191 包装储运图示标志 GB699 优质碳素结构钢技术条件 GB700 碳素结构钢 GB783 起重机械最大起重量系列 GB985 气焊、手工电弧及气体保护焊焊缝坡口的基本形式和尺寸 GB986 埋弧焊焊缝坡口的基本形式和尺寸 GB1102 圆股钢丝绳 GB1348 球墨铸铁件 GB1591 低合金结构钢 GB3323 钢熔化焊对接接头射线照相和质量分级 GB3811 起重机设计规范 GB4628 桥式起重机圆柱车轮 GB4942.2 低压电器外壳防护等级 GB5905 起重机试验规范和程序 GB5972 起重机械用钢丝绳检验和报废实用规范 GB6164 起重机缓冲器 GB6333 电力液压块式制动器 GB6334 直流电磁铁块式制动器 GB6417 金属熔化焊焊缝缺陷分类及说明 GB6974 起重机械名词术语 GB7592 通用桥式起重机限界尺寸 GB8981 优质钢丝绳 GB8923 涂装前钢材表面锈蚀等级和除锈等级 GB9286 色漆和清漆漆膜的划格试验 GB10051 起重吊钩 GB 10095 渐开线圆柱齿轮精度
如何选择合适的步进电机 1. 负载分类: (1)Tf力矩负载: Tf = G·r G 重物重量 r 半径 (2)TJ惯性负载: J = M(R12+R22)/ 32 (Kg·cm) M:质量 R1:外径 R2:内径 TJ = J·dw/dt dw/dt 为角加速度 2.力矩曲线图的说明 力矩曲线图是步进电机输出特性的重要表现,以下是我们对其中关键词语的解释。
说明: 1. 工作频率点:表示步进电机在该点的转速值。单位:Hz n=Θ*Hz / (360*D) n 转/秒 Hz 该点的频率值 D 电路的细分值, Θ步进电机的步距角 例:1.8步进电机,在1/2细分驱动的情况下(即每步0.9)500Hz 时,其速度是 1.25转/秒 2. 起动区域:步进电机可以直接起动或停止的区域。 3. 运行区域:在这个区域里,电机不能直接运行,必须先要在起动区域内起动,然后通过加速的方式,才能到达该工作区域内。同样,在该区域内,电机也不能直接制动,否则就会造成失步,必须通过减速的方式到起动区域内,在进行制动。 4. 最大起动频率点:步进电机在空载情况下,最大的直接起动速度点。 5. 最大运行频率点:步进电机在空载情况下,可以达到的最大的运行速度点。 6. 起动力矩:步进电机在特定的工作频率点下,直接起动可带动的最大力矩负载值。 7. 运行力矩:步进电机在特定的工作频率点下,运行中可带动的最大力矩负载值。由于运动惯性的原因,所以,运行力矩要比起动力矩大。 3 加速和减速运动的控制 当一个系统的工作频率点在力矩曲线图的运行区域内时,如何在最短的时间内加速,减速就成了关键。如下图示,步进电机的动态力矩特性一般在低速时为水平直线状,在高速时,由于电感的影响,很快下滑。
双梁起重机培训材料 操作者必须严格遵守安全技术操作规程,并对自己所操纵的起重机做到全面了解其性能、结构、工作原理,并熟练掌握其操作方法和技巧。要严格按照交接班程序对设备进行检查、保养和记录,发现问题要及时反馈维修部门通知维修。 空操双梁起重机操作司机应具备以下要求: 1.操作者必须身体健康,年满18周岁,视力(包括矫正视力)在1.0以上,无色盲症,听力能满足具体工作条件的要求。 2.操作者应能熟悉安全操作规程和掌握有关安全注意事项。 3.操作者应熟悉空操双梁起重机的基本结构和性能。 4.操作者应熟悉双梁起重机安全装置的作用,掌握相应的吊装作业知识。 5. 司机须持有特殊工种操作证,严禁非驾驶人员操作。 6. 所有司机须参加设备办特种作业考试培训,经设备办考核备案并通过的方可独立操作。 第一部分:双梁桥式起重机基本知识 一.组成: 桥式起重机一般由机械、电气和金属结构三大部分组成。桥式起重机外形象一个两端支承在平行的两条架空轨道上平移运行的单跨平板桥。 1、机械部分:分为三个机构即起升机构、小车运行机构和大车运行机构。起升机构是用来垂直升降物品,小车运行机构是用来带着
载荷作横向移动;大车运行机构用来将起重小车和物品作纵向移动,以达到三维空间里做搬运和装卸货物用。 2、金属结构部分:由桥架和小车架组成。 3、电气部分:由电气设备和电气线路组成 二.主要技术性能参数: 起重量、起升高度、下放深度、跨度、机构工作速度、工作级别、及起重机总重或轮压。 1、起重量:起重机正常工作时允许最大起吊重量。 2、起升高度:吊具的上极限位置及下极限位置之间的距离。 3、跨度:起重机两端车轮垂直中心线间的距离 4、机构工作速度(第5档速度) (1)起升速度:是指起升机构电动机在额定转速时,取物装置满载起升的速度。 (2)大车运行速度:是指大车运行机构电动机在额定转速时,起重机的运行速度。 (3)小车运行速度:是指小车运行机构电动机在额定转速时,起重小车的运行速度。 5、工作级别:表示起重机起吊载荷的满载程度和起吊工作次数多少的繁忙程度的整机工作状况指标,起重机的工作级别分为A1-A8共8个级别,轻级(A1-A3)、中级(A4、A5)、重级(A 6、A7)特重级(A8)。 6、轮压:桥架自重和小车处在极限位置时小车自重和额定起重量作用在大车车轮上的最大垂直压力。
如何选择合适的步进电机 2004年3月14日 1. 负载分类: (1)Tf力矩负载: Tf = G·r G 重物重量 r 半径 (2)TJ惯性负载: J = M(R12+R22)/ 32 (Kg·c m) M:质量 R1:外径 R2:内径 TJ = J·dw/dt dw/dt 为角加速度 2.力矩曲线图的说明 力矩曲线图是步进电机输出特性的重要表现,以下是我们对其中关键词语的解释。
说明: 1. 工作频率点:表示步进电机在该点的转速值。单位:Hz n=Θ*Hz / (360*D) n 转/秒 Hz 该点的频率值 D 电路的细分值, Θ步进电机的步距角 例:1.8步进电机,在1/2细分驱动的情况下(即每步0.9)500Hz 时,其速度是 1.25转/秒 2. 起动区域:步进电机可以直接起动或停止的区域。 3. 运行区域:在这个区域里,电机不能直接运行,必须先要在起动区域内起动,然后通过加速的方式,才能到达该工作区域内。同样,在该区域内,电机也不能直接制动,否则就会造成失步,必须通过减速的方式到起动区域内,在进行制动。 4. 最大起动频率点:步进电机在空载情况下,最大的直接起动速度点。 5. 最大运行频率点:步进电机在空载情况下,可以达到的最大的运行速度点。 6. 起动力矩:步进电机在特定的工作频率点下,直接起动可带动的最大力矩负载值。 7. 运行力矩:步进电机在特定的工作频率点下,运行中可带动的最大力矩负载值。由于运动惯性的原因,所以,运行力矩要比起动力矩大。 3 加速和减速运动的控制 当一个系统的工作频率点在力矩曲线图的运行区域内时,如何在最短的时间内加速,减速就成了关键。如下图示,步进电机的动态力矩特性一般在低速时为水平直线状,在高速时,由于电感的影响,很快下滑。
目录 1 绪论 (1) 1.1 起重机的基本组成 (1) 1.2 起重机运行机构的基本构造及其特点 (1) 1.3 起重机运行机构的驱动方式 (2) 1.4 起重机设计参数 (5) 2 大车运行机构计算 (5) 2.1 确定传动方案 (5) 2.2 选择车轮与轨道并验算其强度 (6) 2.3 运行阻力计算 (7) 2.4 选电动机 (8) 2.5 验算电动机发热条件 (9) 2.6 选择减速器 (9) 2.7 验算运行速度和实际所需功率 (10) 2.8 启动时间验算 (10) 2.9 起动工况下减速器功率校核 (12) 2.10 起动不打滑验算 (12) 2.10.1 二台电动机空载时同时起动 (12) 2.10.2 事故状态 (13) 2.11 选择制动器 (15) 2.12 联轴器选择 (16) 2.12.1 运行机构高速轴的扭矩计算 (16) 2.12.2 低速轴的扭矩计算 (17) 2.13 浮动轴的验算 (17) 2.13.1 疲劳强度验算 (17) 2.13.2 静强度验算 (18) 3 回转小车运行机构计算 (19) 3.1 小车运行机构计算 (19) 3.2 选择车轮与轨道并验算其强度 (19) 3.2.1 车轮踏面疲劳计算 (20) 3.2.2 线接触局部挤压强度验算 (21)
3.3 运行阻力计算 (21) 3.4 选电动机 (22) 3.5 电动机发热条件验算 (23) 3.6 选择减速器 (23) 3.7 验算运行速度和实际所需功率 (23) 3.8 启动时间验算 (24) 3.9 起动工况下校核减速器功率 (25) 3.10 验算起动不打滑条件 (26) 3.11 选择制动器 (27) 3.12 高速轴联轴器及制动轮选择 (28) 3.12.1 高速轴联轴器计算扭矩 (28) 3.12.2 高速轴制动轮选择 (29) 3.13 低速轴联轴器选择 (29) 3.14 低速浮动轴强度验算 (30) 3.14.1 疲劳验算 (30) 3.14.2 强度验算 (31) 4 结束语 (31) 参考文献 (33) 致谢 (34)
? 步距精度 +5%(整步、空载) 温升80°CMax 环境温度-10°C -- +50°C 绝缘电阻100MΩmin.500VDC 耐压500VAC for one minute 径向跳动0.06 Max.(450g-load) 轴向跳动0.08 max.(450g-load) ?技术规格 Model No.相 数 步距 角 保持转 矩 额定电 流 相电 感 相电 阻 引线数 量 转子惯 量 定位转 矩 电机重 量 机身 长(°)N.M A mH Ohm g.cm2 Kg.cm Kg mm 42HS02 2 1.8 0.22 0.4 21 12.5 4 57 0.15 0.24 40 42HSM02 2 0.9 0.24 0.87 7.5 3.1 4 38 0.15 0.23 34 42HS03 2 1.8 0.34 1 4 4.6 8 0.2 200 0.34 48 ?外形尺寸 引线接法
? ?接线图 ? ?步进电机是一种专门用于位置和速度精确控制的特种电机。步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。如接收到一串脉冲步进电机将连续运转一段相应距离。同时可通过控制脉冲频率,直接对电机转速进行控制。由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。 步进电机的种类和特点 步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
电气控制技术 课程设计 题目: 步进电机的控制 院系名称:电气工程学院 成绩: 指导老师签名:
目录 1 系统概述 (1) 1.1 对被控对象步进电机控制的分析 (1) 1.2 设计的目的及工作内容 (1) 2 方案论证 (2) 2.1 开环控制系统 (2) 2.2 闭环控制系统 (2) 3 硬件设计 (3) 3.1 系统的原理方框图 (3) 3.2 I/O分配 (3) 3.3 主电路及I/O接线图 (4) 3.4 元器件选型 (4) 3.4.1 步进电机选型 (4) 3.4.2 PLC选型 (5) 3.4.3 按钮选型 (6) 3.4.4 熔断器选型 (6) 3.5 元件清单 (7) 4 软件设计 (4) 4.1 主流程 (8) 4.1.1 转速控制 (8) 4.1.2 正反转控制 (9) 4.1.3 步数控制 (9) 4.1.4 程序流程图 (9) 4.2 梯形图及其功能注释 (10) 5 系统调试 (14) 5.1 软件调试 (14) 5.2 硬件调试 (14) 5.2.1 转速控制过程 (14) 5.2.2 正反转控制过程 (14) 5.2.3 单步执行控制过程 (14) 5.3 调试结果分析 (14) 设计心得 (15) 参考文献 (16)
1 系统概述 1.1 对被控对象步进电机控制的分析 三相步进电动机是一种将电脉冲信号转换成直线位移或角位移的执行元件。步进电机的输出位移量与输入脉冲个数成正比,其转速与单位时间内输入的脉冲数(脉冲频率)成正比,其转向与脉冲分配到步进电机的各相绕组的相序有关。所以只要控制指令脉冲的数量、频率及电机绕组通电相序,便可控制步进电机的输出位移量、速度和转向。步进电机具有较好的控制性能,其启动、停车、反转及其它任何运行方式改变,都在少数脉冲内完成,且可获得较高的控制精度,因而得到了广泛的应用。典型步进电机外观如图1-1。 图1-1典型步进机 1.2 设计的目的及工作内容 本设计的主要研究内容是以三菱FX2N系列PLC(可编程逻辑控制器)为核心控制步进电机,及其相关外围电路组成的控制电路设计。可以通过对几个开关按钮的控制来实现对步进电机转动的方向、速度和步数的控制。 用PLC控制三相六拍步进电机实现如下操作,其控制要求如下: 三相步进电动机有三个绕组:A、B、C,正转的顺利为:A-AB-B-BC-C-CA-A;反转的顺利为:A-CA-C-BC-B-AB-A。 1.要求能实现正、反转控制,而且正、反转切换无须经过停车步骤。 2.具有两种转速: (1)开关闭合,则转过一个步距角需0.5s。
简单介绍桥式起重机的工作原理 桥式起重机是桥架在高架轨道上运行的一种桥架型起重机,又称天车。桥式起重机的桥架沿铺设在两侧高架上的轨道纵向运行,起重小车沿铺设在桥架上的轨道横向运行,构成一矩形的工作范围,就可以充分利用桥架下面的空间吊运物料,不受地面设备的阻碍。 桥式起重机广泛地应用在室内外仓库、厂房、码头和露天贮料场等处。桥式起重机可分为简易梁桥式起重机、普通桥式起重机和冶金专用桥式起重机三种。 普通桥式起重机一般由桥架运行机构、起重小车、桥架金属结构组成。起重小车又由起升机构、小车运行机构和小车架三部分组成。 起升机构包括制动器、电动机、减速器、卷筒和滑轮组。电动机通过减速器,带动卷筒转动,使钢丝绳绕上卷筒或从卷筒放下,以升降重物。小车架是支托和安装起升机构和小车运行机构等部件的机架,通常为焊接结构。 起重机运行机构的驱动方式可分为两大类:一类为集中驱动,即用一台电动机带动长传动轴驱动两边的主动车轮;另一类为分别驱动、即两边的主动车轮各用一台电动机驱动。中、小型桥式起重机较多采用制动器、减速器和电动机组合成一体的“三合一”驱动方式,大起重量的普通桥式起重机为便于安装和调整,驱动装置常采用万向联轴器。 起重机运行机构一般只用四个主动和从动车轮,如果起重量很大,常用增加车轮的办法来降低轮压。当车轮超过四个时,必须采用铰接均衡车架装置,使起重机的载荷均匀地分布在各车轮上。 桥架的金属结构由主梁和端梁组成,分为单主梁桥架和双梁桥架两类。单主梁桥架由单根主梁和位于跨度两边的端梁组成,双梁桥架由两根主梁和端梁组成。 主梁与端梁刚性连接,端梁两端装有车轮,用以支承桥架在高架上运行。主梁上焊有轨道,供起重小车运行。桥架主梁的结构类型较多比较典型的有箱形结构、四桁架结构和空腹桁架结构。 箱形结构又可分为偏轨箱形双梁、偏轨箱形单主梁、正轨箱形双梁等几种。正轨箱形双梁是广泛采用的一种基本形式,主梁由上、下翼缘板和两侧的垂直腹板组成,小车钢轨布置在上翼缘板的中心线上,它的结构简单,制造方便,适于成批生产,但自重较大。 偏轨箱形双梁和偏轨箱形单主梁的截面都是由上、下翼缘板和不等厚的主副腹板组成,小车钢轨布置在主腹板上方,箱体内的短加劲板可以省去,其中偏轨箱形单主梁是由一根宽翼缘箱形主梁代替两根主梁,自重较小,但制造较复杂。
产品详情 价格:180元最小采购量:不限品牌/型号:Leadshine雷赛/863S22、863S42、863S68H 额定转矩: 2.26/4.26/6.78(NM) 产品介绍 Leadshine雷赛86系列三相步进电机:863S22、863S42、863S68H的详细信息 ?品牌/型号:Leadshine雷赛/863S22、863S42、863S68H ?额定转矩:2.26/4.26/6.78(NM) ?产品类型:三相混和式步进电机 ?额定功率:22-50(W)W ?额定电压:24-48(V)V ?额定电流:5.0/5.0/3.5(A)A ?额定转速:1600(rpm)r/min ?外形尺寸:73/105/127(mm)mm ?产品认证:CE ?适用范围:3DM683/3ND583/3ND883/3ND1183/3ND2283 ?效率:98(%)% ? Leadshine雷赛86系列三相步进电机:863S22、863S42、863S68H ? o86系列三相步进电机 *以上仅为代表性产品 外形尺寸
接线图 步进电机是一种专门用于位置和速度精确控制的特种电机。步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。 如接收到一串脉冲步进电机将连续运转一段相应距离。同时可通过控制脉冲频率,直接对电机转速进行控
制。由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。 步进电机的种类和特点 步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。 * 反应式 定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。 * 永磁式 永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。 * 混合式 混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。 按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变精度和效果。 雷赛步进电机系列 雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。 雷赛采用专利技术研发的三相步进电机驱动系统,更好地解决了传统步进电机低速爬行、有共振区、噪音大、高速扭矩孝起动频率低和驱动器可靠性差等缺点,具有交流伺服电机的某些运行特性,其运行效果可与进口产品相媲美。 两相步进电机命名规则 <> 上例表示机座号为57mm,两相混合式,步距角为1.8度,扭矩0.9Nm,设计序号01,单边出轴的电机。三相步进电机命名规则
步进电机的种类和特点 步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。 * 反应式 定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。 * 永磁式 永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。 * 混合式 混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。 按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍 (0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变 精度和效果。 雷赛步进电机系列 雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。 雷赛采用专利技术研发的三相步进电机驱动系统,更好地解决了传统步进电机低速爬行、有共振区、噪音大、高速扭矩小、起动频率低和驱动器可靠性差等缺点,具有交流伺服电机的某些运行特性,其运行效果可与进口产品相媲美。 两相步进电机命名规则 <> 上例表示机座号为57mm,两相混合式,步距角为1.8度,扭矩0.9Nm,设计序号01,单边出轴的电机。 三相步进电机命名规则 <> 上例表示机座号为57mm,三相混合式,步距角为1.8度,扭矩0.9Nm,设计序号01,单边出轴的电机。
? ?技术规格 ?外形尺寸 引线接法
? ?接线图 ? ?步进电机是一种专门用于位置和速度精确控制的特种电机。步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。如接收到一串脉冲步进电机将连续运转一段相应距离。同时可通过控制脉冲频率,直接对电机转速进行控制。由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。 步进电机的种类和特点 步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
* 反应式 定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。 * 永磁式 永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。 * 混合式 混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。 其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。 按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。 同一步进电机可配不同细分的驱动器以改变精度和效果。 雷赛步进电机系列 雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。 雷赛采用专利技术研发的三相步进电机驱动系统,更好地解决了传统步进电机低速爬行、有共振区、噪音大、高速扭矩小、起动频率低和驱动器可靠性差等缺点,具有交流伺服电机的某些运行特性,其运行效果可与进口产品相媲美。 两相步进电机命名规则 <>
步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS) 反应式:定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。 永磁式:永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。 混合式:混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。 按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变精度和效果。 由此可以确定机械手选取步进电机为两相混合式步进电机。 日本信浓 二相混合式步进电机:58D混合式步进电机 59D混合式步进电机
56C混合式系列 45D系列 42D系列
39D系列 日本安川: 42HD系列 马达:https://www.doczj.com/doc/8d9404501.html,/products/st/list/?series_code=HM00&type=标准型 CMK系列是2相步进电动机和DC24V输入微步驱动器的组合产品。 有助于装置的小型化、低振动化。
行车机械专题讲座系列五 行车减速机(QJ系列) 一、QJ起重机减速器产品特点及应用范围JB/T89051-1999 类型、特点、应用范围和选用原则 1类型 起重机减速器主要用于起重机的起升、运行、回转和变幅四大机构中。 我国目前常用的起重机减速器按齿面硬度分有软齿面、中硬齿面和硬齿面齿轮减速器,按安装方式分有卧式、立式、套装式、悬挂套装式等。见下表。 注:*号为机械工业部宣布淘汰产品。 2 特点 起重机减速器因为是间歇式、周期重复工作。减速器发热相对连续型工作的要好些,但是经常起制动惯性载荷较大。因此轮齿的弯曲强度的安全系数较高,特别是用于起升和变幅机构。直接影响人身和设备安全更应如此。另外起升机构的减速器输出端多数要求带齿盘接手或卷筒联轴器直接与卷筒相联,它不仅传递转矩,还要承受较大的径向载荷(相当于卷筒的一端支座)。 运行机构的“三合一”悬挂套装式减速器,要求体积小、重量轻、结构紧凑,输出端为内花鍵孔直接插在车轮轴上,输入端通过联轴器与制动电机用法兰相联。减速器上端有安装孔通过销轴和缓冲装置固接在机架上。 回转机构常采用摆线针齿减速器或渐开线行星减速器,立式安装,带动开式小齿轮与大齿圈实现回转。 3 应用范围
起重机减速器除了用于起重机各机构中外,也可用于矿山、冶金、化工、建材、轻工等各种机械的传动中。多数减速器除给出按起重机工作级别的功率表外,还给出连续型工作的功率表。 4 选用原则 1) 起重机减速器在选择时首选应满足机械强度的要求,即工作机械所需的功率应小于等于通过折算的减速器输入轴的许用功率。对用于起重机不同机构要适当乘以系数。不同的工作级别要先折算成M5(或M6)工作级别的功率值,再查减速器的功率表选取。因不同的减速器在不同时期设计开发的,其承载能力(即功率表)是用不同计算公式计算的,所以结果也不相同,在选择减速器也就不能采用同一模式,不同类型的减速器所给出的功率表也不能简单的类比。 除齿轮承载功率之外,还要考虑输入、输出轴伸的最大径向力。如果超出给定范围,必须作强度校核。 2) 对连续使用的减速器还要满足热功率核算,特别对硬齿面散热性能较差的减速器。 3) 满足转速的要求,根据原动机的转速和工作机械的转速要求,选配最接近的传动比(最好是实际传动比,如果未给出实际传动比用公称传动比代替。一般实际传动比与公称传动比的误差:二级减速器在±4%;三级减速器在±5%范围内)。如果特殊要求,只好专门配比。 4) 根据传动装置的安装位置、界限尺寸、联接部位、传动性能要求,确定减速器的结构型式、安装型式和装配型式。 5) 根据输入输出的联接方式选择轴端型式。 6) 考虑使用维修方便等因素,注意注油口和排油口的位置等。 二、QJ型起重机三支点减速器工作条件及型式JB/T89051-1999 QJ型起重机三支点减速器(JB/T89051-1999) 1 工作条件 1)齿轮圆周速度不大于16m/s; 2)高速轴转速不大于1000r/min; 3)工作环境温度为-40~+45℃,低于零度时应加热到+5℃。 4)可正反两向运转。 2 型式 1)结构型式 QJ型减速器分为R(B)型——二级、S(C)型——三级和RS(D)型——二级安装尺寸,三级速比(二级折轴式),如下图所示。 a)R(B)型b)S(c)型 c)RS(D)型 2)装配型式共九种,见下图。
2 桥式起重机行走及提升机构传动方案选择 2.1 桥式起重机小车行走及提升机构组成部分 桥式起重机又称天车,是横架于车间、厂房和货场上空进行物料吊运的起重设备。它主要由电气、起重小车、大车运行机构和桥架四部分组成。其中起重小车又可分为提升机构、小车运行机构和小车架。 图2-1总体装配效果图 2.1.1 起重机主要技术参数及其选择 设计参数如下:起重量:30t,提升高度:10m,跨度:20m;提升速度: 5m/min;工作级别:M5级;机构接电持续率:25%。 (1)起重量 查《起重机设计手册》(以下简称手册)表1-1-1 起重量系列(GB/T 783-1987)可知:额定起重量为32t 一般情况下,当起重量超过10t,常设二个提升机构,即主提升机构和副提升机构,选择主钩起重量32t,副钩起重量5t (2)提升高度 查手册表1-1-2电动桥式起重机提升高度系列(GB/T 790-1995)可知:当,主钩提升高度:16m副钩提升高度:18m (3)跨度
查手册表1-1-6桥式起重机跨度系列(GB/T 790-1995)可知: 当,有通道则起重机跨度选取22m,厂房跨度选取24m; 无通道则起重机跨度选取22.5m,厂房跨度选取24m; 2.1.2 起重机工作级别 (1)起重机的使用等级 按GB/T 3811-2008《起重机设计规范》,查手册表1-2-1起重机的使用等级(GB/T 3811-2008,ISO 4301-1986)可知:使用等级为,对应的起重机总工作循环数满足: (2)起重机提升载荷状态级别 载荷状态按设计,即较少吊运额定载荷,经常吊运中重载荷。此时起重机的载荷谱系数为: (3)起重机整机的工作级别 查手册表1-2-4 可知:起重机整机的工作级别为 (4)自重载荷的估算 通用双梁桥式起重机自重估算的经验公式如下: ()起重小车的重量计算公式如下: ()2.2 提升机构 提升机构是起重机中最重要、最基本的机构,其工作的好坏直接影响整台机器的性能。它主要由钢丝绳、卷筒、滑轮、吊钩、电动机、减速机、制动器和联轴器等部分组成。 2.2.1 提升机构的典型形式及比较 大多数起重机提升机构的驱动装置都采取电动机轴与卷筒轴平行布置。 (1)电动机轴与卷筒轴平行布置的情况 对于吊钩起重机,它的提升机构的基本驱动型式见图2-2:
序号英纳仕型号雷赛型号适配电机主要差别 1EZM322DM422/DM422C/DM 320C/M325/M415B 35/39/42 两相步进电机 接口完全兼容,但EZM322最低工作电压为12~36VDC,控制 频率可达250Khz,雷赛最低18VDC,控制最高100Khz 2EZM442DM442/DM432C /M542 42/57 两相步进电机 接口与DM442完全兼容,可互换 3EZM552DM556/M542 /ND556 57/86 两相步进电机 接口可与DM556互换,但EZM552另配PLC控制接口,与PLC 配合应用时无需接限流电阻 4EZM852M752 57/86 两相步进电机 EZM852另配PLC控制接口,与PLC配合应用时无需接限流电 阻,具有低振动和低噪声优势 5EZM872AM882/M860 /ND882 86 两相步进电机 EZM872另配PLC控制接口,与PLC配合应用时无需接限流电 阻,具有低振动和低噪声优势 6EZM872A MA860 86 两相步进电机 EZM872A另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 7EZM872H MA860H 86 两相步进电机 EZM872H另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 8EZM1172DM1182/ND1182 110 两相步进电机 EZM1172另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 9EZM2272DM2282/ND2282 130 两相步进电机 EZM2272另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 103EZM580DM856/ND583 57 三相步进电机 3EZM580另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 113EZM780DM856/ND583 57 三相步进电机 3EZM780另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 123EZM8803ND883 86 三相步进电机 3EZM880另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 133EZM880A空缺 86 三相步进电机 3EZM880A另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势,最高48VAC交流输入 143EZM880H空缺 86 三相步进电机 3EZM880H另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势,最高60VAC交流输入 153EZM1180 3DM1183 /3ND1183 110 三相步进电机 3EZM1183另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 163EZM2280 3DM2283 /3ND2283 130 三相步进电机 3EZM2280另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 17EZD552空缺 42/57 两相步进电机 内置控制脉冲发生器,无需配部控制脉冲,通过IO控制, 实现电机位置和速度控制 18EZN552空缺 42/57 两相步进电机 通过RS485总线和运动控制指令实现对步进电机速度和位置 控制,最多可接127节点 19EZN872空缺 86 两相步进电机 通过RS485总线和运动控制指令实现对步进电机速度和位置 控制,最多可接127节点 20EZN872A空缺 86 两相步进电机 通过RS485总线和运动控制指令实现对步进电机速度和位置 控制,最多可接127节点 21EZN872H空缺 86 两相步进电机 通过RS485总线和运动控制指令实现对步进电机速度和位置 控制,最多可接127节点 22EZS57HBS57 57 两相步进电机 EZS57另配PLC控制接口,与PLC配合应用时无需接限流电 阻,具有高速、低振动和低噪声优势 23EZS86HBS86 86 两相步进电机 EZS86另配PLC控制接口,与PLC配合应用时无需接限流电 阻,具有高速、低振动和低噪声优势 英纳仕步进驱动产品与雷赛步进驱动产品对照表
步进电机选型指南 何为步进电机 步进电机是一种专门用于位置和速度精确控制的特种电机。步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。如接收到一串脉冲步进电机将连续运转一段相应距离。同时可通过控制脉冲频率,直接对电机转速进行控制。由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。 步进电机的种类和特点 步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。 * 反应式 定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。 * 永磁式 永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。
* 混合式 混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。 按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变精度和效果。 雷赛步进电机系列 雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。 雷赛采用专利技术研发的三相步进电机驱动系统,更好地解决了传统步进电机低速爬行、有共振区、噪音大、高速扭矩小、起动频率低和驱动器可靠性差等缺点,具有交流伺服电机的某些运行特性,其运行效果可与进口产品相媲美。 两相步进电机命名规则 <>
步进电机选型的计算示例 一、必要脉冲数和驱动脉冲数速度计算的示例 下面给出的是一个3相步进电机必要脉冲数和驱动脉冲速度的计算示例。这是一个实际应用例子,可以更好的理解电机选型的计算方法。 1.1 驱动滚轴丝杆 如下图,3相步进电机(1.2°/步)驱动物体运动1秒钟,则必要脉冲数和驱动脉冲速度的计算方法如下: 必要脉冲数= 100 10 × 360° 1.2° =3000[脉冲] 如果采用自启动方式驱动1秒钟,则驱动脉冲速度应该这样计算: 3000[Pulse]/1[sec]=3[kHz] 但是,自启动速度不可能是5kHz,应该采用加/减速运行方式来驱动。如果加/减速时间设置为定位时间的25%,启动脉冲速度为500[Hz],则计算方法如下: 驱动脉冲速度[Hz]=3000[脉冲]-500[Hz]×0.25[秒] 1[秒]-0.25[秒] =3.8 [kHz] 如图所示: 1.2驱动传动带 如下图,3相步进电机(1.2°/步)驱动物体运动1秒钟。驱动轮的周长即旋转一圈移动的距离大约为50[mm]。 因此,所需要的必要脉冲数为: 必要脉冲数= 1100 50 × 360° 1.2° =6600 [脉冲]
所需参数同上例驱动滚轴丝杆,采用加/减速运行模式,则驱动脉冲速度为: 驱动脉冲速度[Hz]=6600[脉冲]-500[Hz]×0.25[秒] 1[秒]-0.25[秒] =8.7 [kHz] 如图所示: 二、负载力矩的计算示例(T L) 下面给出的是一个3相步进电机负载力矩的计算示例。这是一个实际应用例子,其中的数字公式有助于更好的理解电机选型的应用。 2.1滚轴丝杆驱动水平负载 如下图,滚轴丝杆驱动水平负载,效率为90%,负载重量为40千克,则负载力矩的计算方法如下: T L=m·P B 2πη × 1 i [kgf·cm] T L=40[kg]×1[cm] 2π×0.9 × 1 1 =7.07 [kgf·cm] 2.2传送带驱动水平负载 传送带驱动水平负载,效率为90%,驱动轮直径16毫米,负载重量是9千克,则负载力矩的计算方法如下: