序号英纳仕型号雷赛型号适配电机主要差别
1EZM322DM422/DM422C/DM
320C/M325/M415B
35/39/42
两相步进电机
接口完全兼容,但EZM322最低工作电压为12~36VDC,控制
频率可达250Khz,雷赛最低18VDC,控制最高100Khz
2EZM442DM442/DM432C
/M542
42/57
两相步进电机
接口与DM442完全兼容,可互换
3EZM552DM556/M542
/ND556
57/86
两相步进电机
接口可与DM556互换,但EZM552另配PLC控制接口,与PLC
配合应用时无需接限流电阻
4EZM852M752
57/86
两相步进电机
EZM852另配PLC控制接口,与PLC配合应用时无需接限流电
阻,具有低振动和低噪声优势
5EZM872AM882/M860
/ND882
86
两相步进电机
EZM872另配PLC控制接口,与PLC配合应用时无需接限流电
阻,具有低振动和低噪声优势
6EZM872A MA860
86
两相步进电机
EZM872A另配PLC控制接口,与PLC配合应用时无需接限流
电阻,具有低振动和低噪声优势
7EZM872H MA860H
86
两相步进电机
EZM872H另配PLC控制接口,与PLC配合应用时无需接限流
电阻,具有低振动和低噪声优势
8EZM1172DM1182/ND1182
110
两相步进电机
EZM1172另配PLC控制接口,与PLC配合应用时无需接限流
电阻,具有低振动和低噪声优势
9EZM2272DM2282/ND2282
130
两相步进电机
EZM2272另配PLC控制接口,与PLC配合应用时无需接限流
电阻,具有低振动和低噪声优势
103EZM580DM856/ND583
57
三相步进电机
3EZM580另配PLC控制接口,与PLC配合应用时无需接限流
电阻,具有低振动和低噪声优势
113EZM780DM856/ND583
57
三相步进电机
3EZM780另配PLC控制接口,与PLC配合应用时无需接限流
电阻,具有低振动和低噪声优势
123EZM8803ND883
86
三相步进电机
3EZM880另配PLC控制接口,与PLC配合应用时无需接限流
电阻,具有低振动和低噪声优势
133EZM880A空缺
86
三相步进电机
3EZM880A另配PLC控制接口,与PLC配合应用时无需接限流
电阻,具有低振动和低噪声优势,最高48VAC交流输入
143EZM880H空缺
86
三相步进电机
3EZM880H另配PLC控制接口,与PLC配合应用时无需接限流
电阻,具有低振动和低噪声优势,最高60VAC交流输入
153EZM1180
3DM1183
/3ND1183
110
三相步进电机
3EZM1183另配PLC控制接口,与PLC配合应用时无需接限流
电阻,具有低振动和低噪声优势
163EZM2280
3DM2283
/3ND2283
130
三相步进电机
3EZM2280另配PLC控制接口,与PLC配合应用时无需接限流
电阻,具有低振动和低噪声优势
17EZD552空缺
42/57
两相步进电机
内置控制脉冲发生器,无需配部控制脉冲,通过IO控制,
实现电机位置和速度控制
18EZN552空缺
42/57
两相步进电机
通过RS485总线和运动控制指令实现对步进电机速度和位置
控制,最多可接127节点
19EZN872空缺
86
两相步进电机
通过RS485总线和运动控制指令实现对步进电机速度和位置
控制,最多可接127节点
20EZN872A空缺
86
两相步进电机
通过RS485总线和运动控制指令实现对步进电机速度和位置
控制,最多可接127节点
21EZN872H空缺
86
两相步进电机
通过RS485总线和运动控制指令实现对步进电机速度和位置
控制,最多可接127节点
22EZS57HBS57
57
两相步进电机
EZS57另配PLC控制接口,与PLC配合应用时无需接限流电
阻,具有高速、低振动和低噪声优势
23EZS86HBS86
86
两相步进电机
EZS86另配PLC控制接口,与PLC配合应用时无需接限流电
阻,具有高速、低振动和低噪声优势
英纳仕步进驱动产品与雷赛步进驱动产品对照表
什么是步进电机 步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。 虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。 目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。仅仅处于一种盲目的仿制阶段。这就给用户在产品选型、使用中造成许多麻烦。签于上述情况,我们决定以广泛的感应子式步进电机为例。叙述其基本工作原理。望能对广大用户在选型、使用、及整机改进时有所帮助。 二、感应子式步进电机工作原理 (一)反应式步 进电机原理 由于反应式步进电机工作原理比较简单。下面先叙述三相反应式步进电机原理。 1、结构: 电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。 0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B 与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图: 2、旋转: 如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。 如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。 如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。 如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て 这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电机就每步(每脉冲)1/3て,向右旋转。如按A,C,B,A……通电,电机就反转。 由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。而方向由导电顺序决定。
如何选择合适的步进电机 1. 负载分类: (1)Tf力矩负载: Tf = G·r G 重物重量 r 半径 (2)TJ惯性负载: J = M(R12+R22)/ 32 (Kg·cm) M:质量 R1:外径 R2:内径 TJ = J·dw/dt dw/dt 为角加速度 2.力矩曲线图的说明 力矩曲线图是步进电机输出特性的重要表现,以下是我们对其中关键词语的解释。
说明: 1. 工作频率点:表示步进电机在该点的转速值。单位:Hz n=Θ*Hz / (360*D) n 转/秒 Hz 该点的频率值 D 电路的细分值, Θ步进电机的步距角 例:1.8步进电机,在1/2细分驱动的情况下(即每步0.9)500Hz 时,其速度是 1.25转/秒 2. 起动区域:步进电机可以直接起动或停止的区域。 3. 运行区域:在这个区域里,电机不能直接运行,必须先要在起动区域内起动,然后通过加速的方式,才能到达该工作区域内。同样,在该区域内,电机也不能直接制动,否则就会造成失步,必须通过减速的方式到起动区域内,在进行制动。 4. 最大起动频率点:步进电机在空载情况下,最大的直接起动速度点。 5. 最大运行频率点:步进电机在空载情况下,可以达到的最大的运行速度点。 6. 起动力矩:步进电机在特定的工作频率点下,直接起动可带动的最大力矩负载值。 7. 运行力矩:步进电机在特定的工作频率点下,运行中可带动的最大力矩负载值。由于运动惯性的原因,所以,运行力矩要比起动力矩大。 3 加速和减速运动的控制 当一个系统的工作频率点在力矩曲线图的运行区域内时,如何在最短的时间内加速,减速就成了关键。如下图示,步进电机的动态力矩特性一般在低速时为水平直线状,在高速时,由于电感的影响,很快下滑。
安川伺服驱动器的常用故障代码 A.00 绝对值数据错绝对值错误或没收到 A.02 参数中断用户参数检测不到 A.04 参数设置错误用户参数设置超出允许值 A.10 过流电源变压器过流 A.30 再生电路检查错误再生电路检查错误 A.31 位置错误脉冲溢出位置错误,脉冲超出参数Cn-1E设定值 A.40 主电路电压错误主电路电压出错 A.51 过速电机转速过快 A.71 过载(大负载) 电机几秒至几十秒过载运行 A.72 过载(小负载) 电机过载下连续运行 A.80 绝对值编码器差错绝对值编码器每转脉冲数出错ssszxx f A.81 绝对值编码器失效绝对值编码器电源不正常 A.82 绝对值编码器检测错误绝对值编码器检测不正常 A.83 绝对值编码器电池错误绝对值编码器电池电压不正常 A.84 绝对值编码器数据不对绝对值编码器数据接受不正常 A.85 绝对值编码器转速过高电机转速超过400转/分后编码器打开 A.A1 过热驱动器过热 A.B1 给定输入错误伺服驱动器CPU检测给定信号错误 A.C1 伺服过运行伺服电机(编码器)失控 A.C2 编码器输出相位错误编码器输出A、B、C相位出错 A.C3 编码器A相B相断路编码器A相B相没接 A.C4 编码器C相断路编码器C相没接 A.F1 电源缺相主电源一相没接 A.F3 电源失电电源被切断 CPF00 手持传输错误1 通电5秒后,手持与连接仍不对 CPF01 手持传输错误2 传输发生5次以上错误 A.99 无错误操作状态不正常 安川伺服报警代码 报警代码报警名称主要内容 A.00 绝对值数据错误不能接受绝对值数据或接受的绝对值数据异常A.02 参数破坏用户常数的“和数校验”结果异常 A.04 用户常数设定错误设定的“用户常数”超过设定范围 A.10 电流过大功率晶体管电流过大 A.30 测出再生异常再生处理回路异常 A.31 位置偏差脉冲溢出位置偏差脉冲超出了用户常数“溢出(Cn-1E)”的值
如何选择合适的步进电机 2004年3月14日 1. 负载分类: (1)Tf力矩负载: Tf = G·r G 重物重量 r 半径 (2)TJ惯性负载: J = M(R12+R22)/ 32 (Kg·c m) M:质量 R1:外径 R2:内径 TJ = J·dw/dt dw/dt 为角加速度 2.力矩曲线图的说明 力矩曲线图是步进电机输出特性的重要表现,以下是我们对其中关键词语的解释。
说明: 1. 工作频率点:表示步进电机在该点的转速值。单位:Hz n=Θ*Hz / (360*D) n 转/秒 Hz 该点的频率值 D 电路的细分值, Θ步进电机的步距角 例:1.8步进电机,在1/2细分驱动的情况下(即每步0.9)500Hz 时,其速度是 1.25转/秒 2. 起动区域:步进电机可以直接起动或停止的区域。 3. 运行区域:在这个区域里,电机不能直接运行,必须先要在起动区域内起动,然后通过加速的方式,才能到达该工作区域内。同样,在该区域内,电机也不能直接制动,否则就会造成失步,必须通过减速的方式到起动区域内,在进行制动。 4. 最大起动频率点:步进电机在空载情况下,最大的直接起动速度点。 5. 最大运行频率点:步进电机在空载情况下,可以达到的最大的运行速度点。 6. 起动力矩:步进电机在特定的工作频率点下,直接起动可带动的最大力矩负载值。 7. 运行力矩:步进电机在特定的工作频率点下,运行中可带动的最大力矩负载值。由于运动惯性的原因,所以,运行力矩要比起动力矩大。 3 加速和减速运动的控制 当一个系统的工作频率点在力矩曲线图的运行区域内时,如何在最短的时间内加速,减速就成了关键。如下图示,步进电机的动态力矩特性一般在低速时为水平直线状,在高速时,由于电感的影响,很快下滑。
富士伺服驱动器报警代码 一、报警显示的含义 序号 显示 名称 说明 种类 1 oc1 过电流1 重大故障 2 oc2 过电流2 3 oS 超速 4 Hu 过电压 5 Et1 编码器异常1 6 Et2 编码器异常2 7 ct 控制电路异常 8 dE 存储器异常 9 Fb 保险丝断 10 cE 电机组合异常 11 tH 再生晶体管过热 12 Ec 编码器通信异常 13 ctE CONT 重复 14 oL1 过载1 15 oL2 过载2 16 rH4 浪涌电流抑制电路异常 17 LuP 主电路电压不足 轻微故障 18 rH1 内部再生电阻过热 19 rH2 外部再生电阻过热 20 rH3 再生晶体管异常 21 oF 偏差超出 22 AH 放大器过热 23 EH 编码器过热 24 dL1 ABS 数据丢失1 25 dL2 ABS 数据丢失2 26 dL3 ABS 数据丢失3 27 AF 多旋转溢出 28 ' E 初始化错误 29 ˉPoF 未给伺服电机通电 防撞开关急停 30 ˉPn0 速度零停止(通过输入强制停止信号,以速度零停止) 介质定位装置没有放下 31 =PP1 脉冲列输入运行中 正常状态显示 32 =Pot 检测正/负方向的超程信号中 原点位置时显示(Y 向驱动器显示)
二、报警的处理方法: oc1 过电流1:从伺服放大器输出的电流超过规定值 oc2 过电流2: 原因措施 伺服电机的输出配线错误修复动力线(U、V、W)的配线 确认电线(目测、导通检查),并更换 伺服电机的输出配线短路 伺服电机绝缘不良绝缘电阻测定(对地间在数MΩ以上) 伺服电机的故障线间电阻测定(各线间为数Ω) 再生电阻器的电阻值不合适更换为可适用范围的再生电阻器 因编码器的异常引起的电流不平稳更换伺服电机 未接地线连接地线 oS 超速:伺服电机的转速超过最高速度的1.1倍 原因措施 伺服电机的输出配线错误修复动力线(U、V、W)的配线 伺服电机的转速超速●延长PA1_37:加速时间 ●增大PA1_52:一次延迟S形时间常数 ●提高PA1_15:自整定增益1 Hu 过电压:伺服放大器内部直流电压高于上限值 原因措施 电源电压过高(刚接通电源后)●确认电源电压在规格范围内 ●若有功率改进用电容器则插入电抗器 外部再生电阻器的未连接或误配线连接外部再生电阻器 再生晶体管破损更换伺服放大器 Et1 编码器异常1:编码器的1转位置检测异常 Et2 编码器异常2 :编码器存储数据的读取异常 原因措施 来自编码器的数据异常使用屏蔽线以免爱噪音影响 编码器出现故障更换伺服电机 ct 控制电路异常:伺服放大器内部的控制电源电压存在异常,内部电路有出现的故障的可能性 原因措施 伺服放大器出现故障即使再次接通电源也未恢复时,更换伺服放 大器 dE 存储器异常:伺服放大器内保存参数数据损坏 原因措施
? 步距精度 +5%(整步、空载) 温升80°CMax 环境温度-10°C -- +50°C 绝缘电阻100MΩmin.500VDC 耐压500VAC for one minute 径向跳动0.06 Max.(450g-load) 轴向跳动0.08 max.(450g-load) ?技术规格 Model No.相 数 步距 角 保持转 矩 额定电 流 相电 感 相电 阻 引线数 量 转子惯 量 定位转 矩 电机重 量 机身 长(°)N.M A mH Ohm g.cm2 Kg.cm Kg mm 42HS02 2 1.8 0.22 0.4 21 12.5 4 57 0.15 0.24 40 42HSM02 2 0.9 0.24 0.87 7.5 3.1 4 38 0.15 0.23 34 42HS03 2 1.8 0.34 1 4 4.6 8 0.2 200 0.34 48 ?外形尺寸 引线接法
? ?接线图 ? ?步进电机是一种专门用于位置和速度精确控制的特种电机。步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。如接收到一串脉冲步进电机将连续运转一段相应距离。同时可通过控制脉冲频率,直接对电机转速进行控制。由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。 步进电机的种类和特点 步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
电气控制技术 课程设计 题目: 步进电机的控制 院系名称:电气工程学院 成绩: 指导老师签名:
目录 1 系统概述 (1) 1.1 对被控对象步进电机控制的分析 (1) 1.2 设计的目的及工作内容 (1) 2 方案论证 (2) 2.1 开环控制系统 (2) 2.2 闭环控制系统 (2) 3 硬件设计 (3) 3.1 系统的原理方框图 (3) 3.2 I/O分配 (3) 3.3 主电路及I/O接线图 (4) 3.4 元器件选型 (4) 3.4.1 步进电机选型 (4) 3.4.2 PLC选型 (5) 3.4.3 按钮选型 (6) 3.4.4 熔断器选型 (6) 3.5 元件清单 (7) 4 软件设计 (4) 4.1 主流程 (8) 4.1.1 转速控制 (8) 4.1.2 正反转控制 (9) 4.1.3 步数控制 (9) 4.1.4 程序流程图 (9) 4.2 梯形图及其功能注释 (10) 5 系统调试 (14) 5.1 软件调试 (14) 5.2 硬件调试 (14) 5.2.1 转速控制过程 (14) 5.2.2 正反转控制过程 (14) 5.2.3 单步执行控制过程 (14) 5.3 调试结果分析 (14) 设计心得 (15) 参考文献 (16)
1 系统概述 1.1 对被控对象步进电机控制的分析 三相步进电动机是一种将电脉冲信号转换成直线位移或角位移的执行元件。步进电机的输出位移量与输入脉冲个数成正比,其转速与单位时间内输入的脉冲数(脉冲频率)成正比,其转向与脉冲分配到步进电机的各相绕组的相序有关。所以只要控制指令脉冲的数量、频率及电机绕组通电相序,便可控制步进电机的输出位移量、速度和转向。步进电机具有较好的控制性能,其启动、停车、反转及其它任何运行方式改变,都在少数脉冲内完成,且可获得较高的控制精度,因而得到了广泛的应用。典型步进电机外观如图1-1。 图1-1典型步进机 1.2 设计的目的及工作内容 本设计的主要研究内容是以三菱FX2N系列PLC(可编程逻辑控制器)为核心控制步进电机,及其相关外围电路组成的控制电路设计。可以通过对几个开关按钮的控制来实现对步进电机转动的方向、速度和步数的控制。 用PLC控制三相六拍步进电机实现如下操作,其控制要求如下: 三相步进电动机有三个绕组:A、B、C,正转的顺利为:A-AB-B-BC-C-CA-A;反转的顺利为:A-CA-C-BC-B-AB-A。 1.要求能实现正、反转控制,而且正、反转切换无须经过停车步骤。 2.具有两种转速: (1)开关闭合,则转过一个步距角需0.5s。
保护功能 报警 代码 故障原因应对措施 控制电源 欠电压 11 控制电源逆变器上P、N 间电压低于规定值。1)交流电源电压太低。瞬时失电。 2)电源容量太小。 电源接通瞬间的冲击电流导致电压跌落。 3)驱动器(内部电路)有缺陷。 测量 L1C、L2C 和r、t 之间电压。 1)提高电源电压。更换电源。 2)增大电源容量。 3)请换用新的驱动器。 过电压 12 电源电压高过了允许输入电压的范围。 逆变器上 P、N 间电压超过了规定值。 电源电压太高。 存在容性负载或UPS(不间断电源),使得 线电压升高。 1)未接再生放电电阻。 2)外接的再生放电电阻不匹配,无法吸收再 生能量。 3)驱动器(内部电路)有缺陷。 测量 L1、L2 和L3 之间的相电压。 配备电压正确的电源。 排除容性负载。 1)用电表测量驱动器上P、B 间外接电阻阻值。如果读数是“∞”,说明电阻没有真正地接入。请换一个。 2)换用一个阻值和功率符合规定值的外接电阻。 3)请换用新的驱动器。 主电源 欠电压 13 当参数Pr65(主电源关断时欠电压报警触发 选择)设成1 时,L1、L3 相间电压发生瞬时 跌落,但至少是参数Pr6D(主电源关断检测 时间)所设定的时间;或者,在伺服使能(Servo-ON)状态下主电源逆变器P-N 间相 电压下降到规定值以下。
1)主电源电压太低。发生瞬时失电。 2)发生瞬时断电。 3)电源容量太小。 电源接通瞬间的冲击电流导致电压跌落。 4)缺相:应该输入3 相交流电的驱动器实际输入的是单相电。 5)驱动器(内部电路)有缺陷。 测量 L1、L2、L3 端子之间的相电压。 1)提高电源电压。 换用新的电源。 排除电磁继电器故障后再重新接通电源。 2)检查Pr6D 设定值,纠正各相接线。 3)请参照“附件清单”,增大电源容量。 4)正确连接电源的各相(L1、L2、L3)线路。单相电源请只接L1、L3 端子。 5)请换用新的驱动器。 过电流 和 接地错误 14 * 流入逆变器的电缆超过了规定值。 1)驱动器(内部电路、IGBT 或其他部件) 有缺陷。 2)电机电缆(U、V、W)短路了。 3)电机电缆(U、V、W)接地了。 4)电机烧坏了。 5)电机电缆接触不良。 6)频繁的伺服ON/OFF(SRV-ON)动作导 1)断开电机电缆,激活伺服ON 信号。如果马上出现此报警,请换用新驱动器。 2)检查电机电缆,确保U、V、W 没有短路。正确的连接电机电缆。 3)检查U、V、W 与“地线”各自的绝缘电阻。如果绝缘破坏,请换用新机器。 4)检查电机电缆U、V、W 之间的阻值。如果阻值不平衡,请换用新驱动器。 5)检查电机的U、V、W 端子是否有松动或未接,应保证可靠的电气接触。 6)请换用新驱动器。 Minas A4 系列驱动器技术资料选编- 61 - 保护功能 报警 代码 故障原因应对措施
产品详情 价格:180元最小采购量:不限品牌/型号:Leadshine雷赛/863S22、863S42、863S68H 额定转矩: 2.26/4.26/6.78(NM) 产品介绍 Leadshine雷赛86系列三相步进电机:863S22、863S42、863S68H的详细信息 ?品牌/型号:Leadshine雷赛/863S22、863S42、863S68H ?额定转矩:2.26/4.26/6.78(NM) ?产品类型:三相混和式步进电机 ?额定功率:22-50(W)W ?额定电压:24-48(V)V ?额定电流:5.0/5.0/3.5(A)A ?额定转速:1600(rpm)r/min ?外形尺寸:73/105/127(mm)mm ?产品认证:CE ?适用范围:3DM683/3ND583/3ND883/3ND1183/3ND2283 ?效率:98(%)% ? Leadshine雷赛86系列三相步进电机:863S22、863S42、863S68H ? o86系列三相步进电机 *以上仅为代表性产品 外形尺寸
接线图 步进电机是一种专门用于位置和速度精确控制的特种电机。步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。 如接收到一串脉冲步进电机将连续运转一段相应距离。同时可通过控制脉冲频率,直接对电机转速进行控
制。由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。 步进电机的种类和特点 步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。 * 反应式 定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。 * 永磁式 永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。 * 混合式 混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。 按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变精度和效果。 雷赛步进电机系列 雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。 雷赛采用专利技术研发的三相步进电机驱动系统,更好地解决了传统步进电机低速爬行、有共振区、噪音大、高速扭矩孝起动频率低和驱动器可靠性差等缺点,具有交流伺服电机的某些运行特性,其运行效果可与进口产品相媲美。 两相步进电机命名规则 <> 上例表示机座号为57mm,两相混合式,步距角为1.8度,扭矩0.9Nm,设计序号01,单边出轴的电机。三相步进电机命名规则
一、检查 1、警报检出内容 (图1) (按键面板的7段LED显示器以秒的间隔闪烁。) 2、警报检出时的动作 (1)在检出的同时自由运转 (图2) (2)以最大转矩减速,停止后自由运转 (图3) 二、维护 1、过电流 【显示】 (图4) 【检出内容】 主回路晶体的输出电流超过规定值。
【要因与处置】 (图5) 伺服马达的动力沛县有可能漏电或短路。 通常,对地间有数MΩ以上,线圈之间的电阻值均衡。 2、过速度 【显示】 (图6) 【检出内容】 伺服马达的回转速度超过最高速度的倍。 【要因与处置】 (图7) 马达的回转速度有可能出现峰突。 (图8) 3、过电压 【显示】 (图9) 【检出内容】 伺服驱动器内部的直流中间电压比上限值大。
【要因与处置】 (图10) 可以在按键面板的监视模式确认内部的中间电压。 On 16:直流中间电压(最大值)On 17:直流中间电压(最小值)约在420V时检出电压。 4、编码器异常 【显示】 (图11) 【检出内容】 伺服马达内部的编码器可能已损坏。 【要因与处置】 (图12) 编码器内部的CPU是以自我诊断的结果来检出警报的。 这时,伺服驱动器马达之间正在进行通信。 5、控制电流异常 【显示】 (图13) 【检出内容】
伺服驱动器内部的控制电源发生异常,有损坏的可能性。 【要因与处置】 (图14) 6、记忆体异常 【显示】 (图15) 【检出内容】 保存在伺服驱动器EEPROM内部的参数内容已损坏。 【要因与处置】 (图16) 发生记忆体异常时,请执行参数的初始化。 执行初始化之后仍然会检出记忆体异常时,必须更换驱动器。 7、回生晶体过热 【显示】 (图17) 【检出内容】 伺服驱动器内装的回生处理用晶体过热。 【要因与处置】
? ?技术规格 ?外形尺寸 引线接法
? ?接线图 ? ?步进电机是一种专门用于位置和速度精确控制的特种电机。步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。如接收到一串脉冲步进电机将连续运转一段相应距离。同时可通过控制脉冲频率,直接对电机转速进行控制。由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。 步进电机的种类和特点 步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
* 反应式 定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。 * 永磁式 永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。 * 混合式 混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。 其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。 按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。 同一步进电机可配不同细分的驱动器以改变精度和效果。 雷赛步进电机系列 雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。 雷赛采用专利技术研发的三相步进电机驱动系统,更好地解决了传统步进电机低速爬行、有共振区、噪音大、高速扭矩小、起动频率低和驱动器可靠性差等缺点,具有交流伺服电机的某些运行特性,其运行效果可与进口产品相媲美。 两相步进电机命名规则 <>
伦茨9300系列伦茨伺服驱动器故障代码表 2012-12-21 0:51:27 点击:125 伦茨驱动器故障代码表9300系列 优先显示含义 1 GLOBAL DRIVE INIT 键盘和控制器之间的初始化或通信错误 2 XXX - TRIP 活动行程(C0168/ 1的内容) 3 XXX - MESSAGE 活动消息(C0168/ 1的内容) 4 特别控制器状态: 4 Special controller states: 接通禁止 5 控制器源禁止(C0004的价值是在同一时间显示): STP1 端子X5/28 STP3 键盘或LE COM A/B/LI STP4 InterBus-S or Profibus STP5 系统总线(CAN) STP6 C0040 6 快速停止来源: QSP-term-Ext 在输入MCTRL-QSP的功能块MCTRL的高信号 (出厂设置应用于端子X5/E1和X5/E2的) QSP-C0135 键盘或端子A/B/LI QSP-AIF inter总线-S或ProFi系统总线 QSP-CAN 系统总线(CAN) 7 XXX - WARNING 活跃的警告(C0168/ 1的内容) 8 xxxx C0004的值 显示错误原因解决办法 --- 无错误- - CCr 系统故障强干扰对控制电缆检查控制电缆 CCr System fault 在布线的接地或接地回路确保布线合理 CE0 通讯错误转移过程中的控制指令通过自动化接口X1的错误在牢固的自动化模块和插件,如果有必要,螺栓下来 CE1 通讯错误 过程数据输入 对象CAN_IN_1 CAN_IN_1对象接收错误的数据,或通讯中断检查电缆在x4 检查变送器 增加监控时间,如果有必要根据C0357/ 1 CE2 通讯错误过程数据输入 对象CAN_IN_2 CAN_IN_2 对象接收错误的数据,或通讯中断检查电缆在x4 检查变送器下
步进电机的种类和特点 步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。 * 反应式 定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。 * 永磁式 永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。 * 混合式 混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。 按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍 (0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变 精度和效果。 雷赛步进电机系列 雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。 雷赛采用专利技术研发的三相步进电机驱动系统,更好地解决了传统步进电机低速爬行、有共振区、噪音大、高速扭矩小、起动频率低和驱动器可靠性差等缺点,具有交流伺服电机的某些运行特性,其运行效果可与进口产品相媲美。 两相步进电机命名规则 <> 上例表示机座号为57mm,两相混合式,步距角为1.8度,扭矩0.9Nm,设计序号01,单边出轴的电机。 三相步进电机命名规则 <> 上例表示机座号为57mm,三相混合式,步距角为1.8度,扭矩0.9Nm,设计序号01,单边出轴的电机。
步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS) 反应式:定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。 永磁式:永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。 混合式:混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。 按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变精度和效果。 由此可以确定机械手选取步进电机为两相混合式步进电机。 日本信浓 二相混合式步进电机:58D混合式步进电机 59D混合式步进电机
56C混合式系列 45D系列 42D系列
39D系列 日本安川: 42HD系列 马达:https://www.doczj.com/doc/338066357.html,/products/st/list/?series_code=HM00&type=标准型 CMK系列是2相步进电动机和DC24V输入微步驱动器的组合产品。 有助于装置的小型化、低振动化。
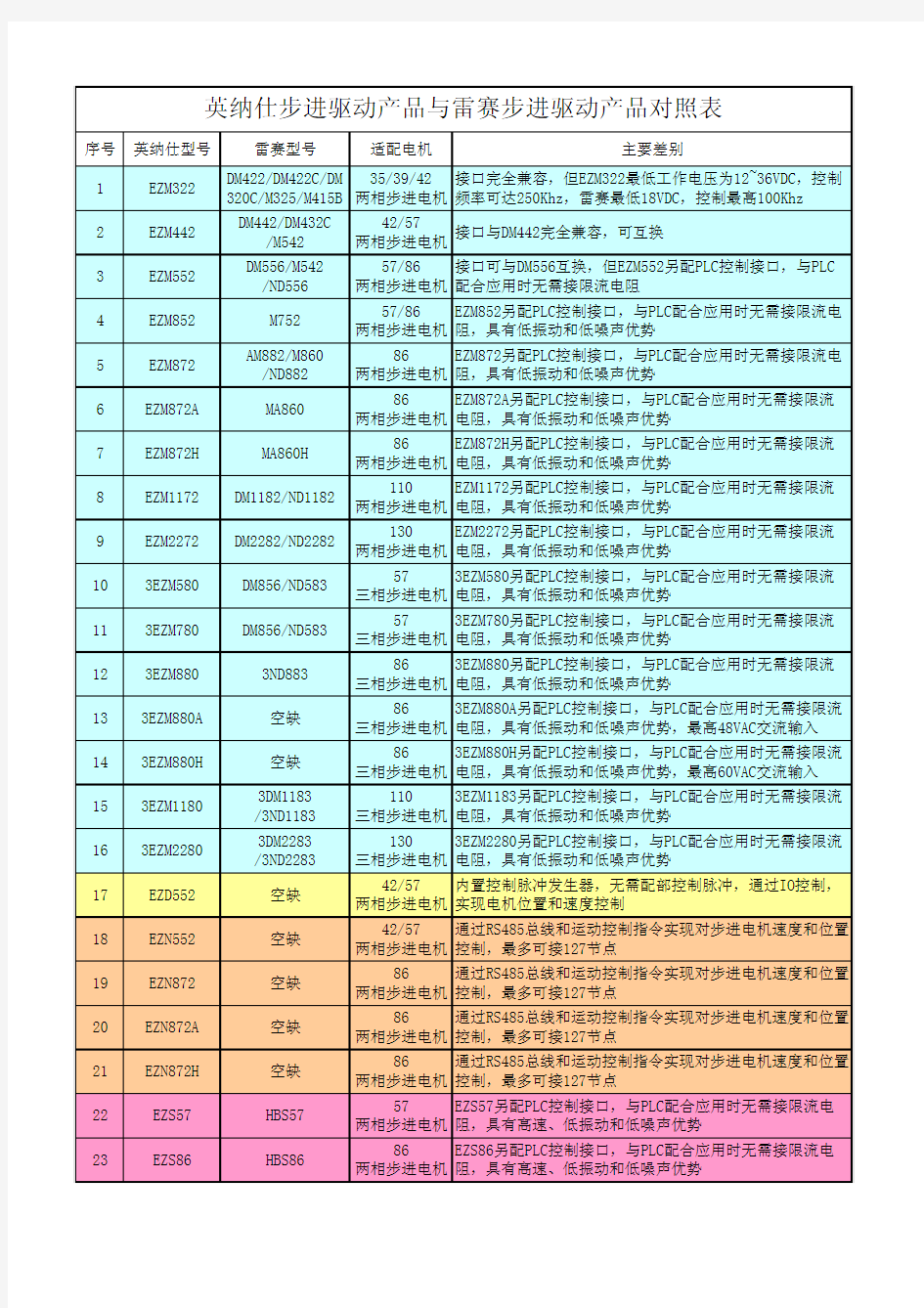
序号英纳仕型号雷赛型号适配电机主要差别 1EZM322DM422/DM422C/DM 320C/M325/M415B 35/39/42 两相步进电机 接口完全兼容,但EZM322最低工作电压为12~36VDC,控制 频率可达250Khz,雷赛最低18VDC,控制最高100Khz 2EZM442DM442/DM432C /M542 42/57 两相步进电机 接口与DM442完全兼容,可互换 3EZM552DM556/M542 /ND556 57/86 两相步进电机 接口可与DM556互换,但EZM552另配PLC控制接口,与PLC 配合应用时无需接限流电阻 4EZM852M752 57/86 两相步进电机 EZM852另配PLC控制接口,与PLC配合应用时无需接限流电 阻,具有低振动和低噪声优势 5EZM872AM882/M860 /ND882 86 两相步进电机 EZM872另配PLC控制接口,与PLC配合应用时无需接限流电 阻,具有低振动和低噪声优势 6EZM872A MA860 86 两相步进电机 EZM872A另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 7EZM872H MA860H 86 两相步进电机 EZM872H另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 8EZM1172DM1182/ND1182 110 两相步进电机 EZM1172另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 9EZM2272DM2282/ND2282 130 两相步进电机 EZM2272另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 103EZM580DM856/ND583 57 三相步进电机 3EZM580另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 113EZM780DM856/ND583 57 三相步进电机 3EZM780另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 123EZM8803ND883 86 三相步进电机 3EZM880另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 133EZM880A空缺 86 三相步进电机 3EZM880A另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势,最高48VAC交流输入 143EZM880H空缺 86 三相步进电机 3EZM880H另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势,最高60VAC交流输入 153EZM1180 3DM1183 /3ND1183 110 三相步进电机 3EZM1183另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 163EZM2280 3DM2283 /3ND2283 130 三相步进电机 3EZM2280另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 17EZD552空缺 42/57 两相步进电机 内置控制脉冲发生器,无需配部控制脉冲,通过IO控制, 实现电机位置和速度控制 18EZN552空缺 42/57 两相步进电机 通过RS485总线和运动控制指令实现对步进电机速度和位置 控制,最多可接127节点 19EZN872空缺 86 两相步进电机 通过RS485总线和运动控制指令实现对步进电机速度和位置 控制,最多可接127节点 20EZN872A空缺 86 两相步进电机 通过RS485总线和运动控制指令实现对步进电机速度和位置 控制,最多可接127节点 21EZN872H空缺 86 两相步进电机 通过RS485总线和运动控制指令实现对步进电机速度和位置 控制,最多可接127节点 22EZS57HBS57 57 两相步进电机 EZS57另配PLC控制接口,与PLC配合应用时无需接限流电 阻,具有高速、低振动和低噪声优势 23EZS86HBS86 86 两相步进电机 EZS86另配PLC控制接口,与PLC配合应用时无需接限流电 阻,具有高速、低振动和低噪声优势 英纳仕步进驱动产品与雷赛步进驱动产品对照表
常见的三菱伺服故障代码及故障处理方案在中国使用三菱交流伺服系统主要由三个系列:MR-ES、MR-J2S、MR-J3。 通常故障情况可由伺服驱动器上显示代码来初步判断,以下是几种常见的故障及其排查方法: 1、AL.E6 -表示伺服紧急停止。引起此故障的原因一般有两个,一个是控制回路24V电源没有接入,另一个是CN1口EMG和SG之间没有接通。 2、AL.37-参数异常。内部参数乱,操作人员误设参数或者驱动器受外部干扰导致。一般参数恢复成出厂值即可解决。 3、AL.16-编码器故障。内部参数乱或编码器线故障或电机编码器故障。参数恢复出厂值或者更换线缆或者更换电机编码器,若故障依旧,则驱动器底板损坏。 4、AL.20-编码器故障。电机编码器故障或线缆断线、接头松动等导致。更换编码器线或伺服电机编码器。MR-J3系列发生此故障时,还有一种可能是驱动器CPU接地线烧断导致。 5、AL.30-再生制动异常。若刚通电就出现报警,则驱动器内部制动回路元件损坏。若在运行过程中出现,可检查制动回路接线,必要时外配制动电阻。 6、AL.50、AL.51-过载。检查输出U、V、W三相相序接线是否正确,伺服电机三相线圈烧坏或接地故障。监控伺服电机负载率是否长时间超过100%,伺服响应参数设置过高,产生 共振等原因。 7、AL.E9-主回路断开。检查主回路电源是否接入,若正常则主模块检测回路故障,须更换驱动器或配件。 8、AL.52-误差过大。电机编码器故障或驱动器输出模块回路元件损坏,通常油污较多的使用场合此故障较多。 另外简单判断伺服电机故障方法:去掉电机所有接线后,转动电机轴承,如能感觉到明显的阻力,转动时不顺畅,则机身线圈烧坏,另外装配联轴器不当时很容易把编码器敲坏,可摇动电机编码器部分,若能听到编码器碎片的声音,则编码器被敲坏。 附上三菱伺服MR-J2S系列所有代码 伺服报警的代码: —— AL10 欠压 —— AL12 存储器异常
DKC 故障诊断 1诊断信息F和诊断信息E的说明1.1 错误诊断信息F F205 凸轮轴故障 F207 切换至未初始化运行模式. F208 UL电机类型已变 F209 PL装载参数默认值 F211 DISC – Error no.1(#1错误) F212 DISC – Error no.2(#2错误) F212 DISC – Error no.3(#3错误) F212 DISC – Error no.4(#4错误) F217 未接冷却风扇 F218 放大器过热关机 F219 电机过热关机 F220 制动电阻器过载关机 F221 电机温度监控器故障 F223 停止轴时的初始化过程错误 F224 超过最大制动时间
F226 功率部分欠电压 F228 过大偏差 F229 编码器 1故障:象限错误 F230 超过编码器 1最大信号频率 F236 位置反馈的差值过大 F237 位置指令的差值过大 F238 实际速度值的差值过大 F242 编码器 2故障:信号幅度错误 F245 编码器2故障:象限错误 F246 超过编码器2最大信号频率 F248 电池电压过低 F249 主驱动器编码器故障:信号太小 F250 目标位置预置内存溢出 F252 主驱动器编码器故障:象限错误 F253 增量编码器仿真:脉冲频率太高 F260 指令电流极限关闭 F262 状态输出口出现外部短路 F267 内部硬件同步错误 F269 电机制动器释放过程中错误 F276 绝对编码器超出允许的窗口 F277 电流测量补偿错误 F281 主回路故障 F288 EMD模块固件升级过程中出现错误F291 EMD模块超时 F292 EMD模块过热 F294 Ecox客户端超时 F296 EcoX客户端数量不正确 F297 EcoX客户端错误 F386 电源模块没有就绪信号 F401 双 MST故障关机 F402 双 MDT故障关机 F403 通信阶段关机 F404 阶段前进过程中出现错误 F405 阶段后退过程中出现错误 F406 阶段切换无就绪信号 F407 主通信初始化过程中的错误 F411 双SST故障关机 F434 紧停 E-STOP F629 超过正行程极限 F630 超过负行程极限 F634 紧停 E-STOP F643 探测到正行程极位开关 F644 探测到负行程限位开关 F811 换算偏置无法确定
A.先用万用表测量8个引线之间的电阻,可判断出4组线圈引线; B.由于只接1、6,2、8或1、6,7、4二个线圈电机也能正常转动,所以,在4个线圈中任选2个,接在驱动器上; 如果电机不转,说明这2组线圈是A相线圈;另外2个线圈是B相的2个线圈; 如果电机转动,说明这2个线圈一个是A相,一个是B相线圈; C.接2组线圈让电机转动后,再从剩下的2个线圈中任选一个线圈,串联在A相线圈上; 如果步进电机正常转动了,说明该线圈是A相的另一个线圈; 如果电机不转,将这个线圈的正负对调后再试一次,如果电机还不转,说明该线圈是B 相的另一个线圈; D.用上述同样方法,可以确定后一个线圈的极性。 步进电机接线图,8线步进电机接线图图解步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。 在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
工作原理 通常电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。当定子的矢量磁场旋转一个角度。转子也随着该磁场转一个角度。每输入一个电脉冲,电动机转动一个角度前进一步。它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成正比。改变绕组通电的顺序,电机就会反转。所以可用控制脉冲数量、频率及电动机各相绕组的通电顺序来控制步进电机的转动。 发热原理 通常见到的各类电机,内部都是有铁芯和绕组线圈的。绕组有电阻,通电会产生损耗,损耗大小与电阻和电流的平方成正比,这就是我们常说的铜损,如果电流不是标准的直流或正弦波,还会产生谐波损耗;铁心有磁滞涡流效应,在交变磁场中也会产生损耗,其大小与材料,电流,频率,电压有关,这叫铁损。铜损和铁损都会以发热的形式表现出来,从而影响电机的效率。步进电机一般追求定位精度和力矩输出,效率比较低,电流一般比较大,且谐波成分高,电流交变的频率也随转速而变化,因而步进电机普遍存在发热情况,且情况比一般交流电机严重。 步进电机接线图