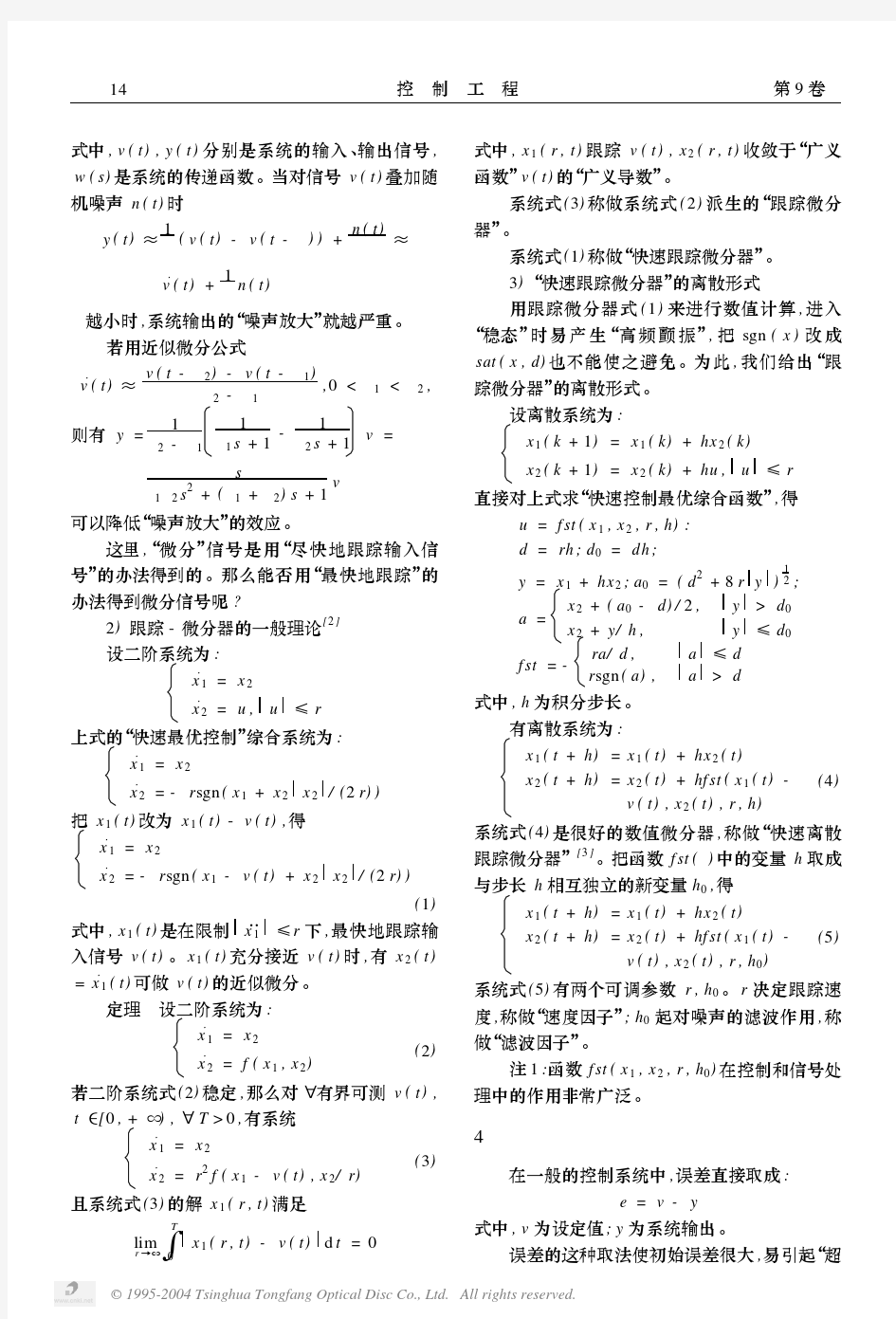
自抗扰算法(ADRC )介绍报告 自抗扰控制器自PID 控制器演变过来,采取了PID 误差反馈控制的核心理念。传统PID 控制直接引取输出于参考输入做差作为控制信号,导致出现响应快速性与超调性的矛盾出现。自抗扰控制器主要由三部分组成:跟踪微分器(tracking differentiator),扩展状态观测器 (extended state observer) 和非线性状态误差反馈控制律(nonlinear state error feedback law)。跟踪微分器的作用是安排过渡过程,给出合理的控制信号,解决了响应速度与超调性之间的矛盾。扩展状态观测器用来解决模型未知部分和外部未知扰动综合对控制对象的影响。虽然叫做扩展状态观测器,但与普通的状态观测器不同。扩展状态观测器设计了一个扩展的状态量来跟踪模型未知部分和外部未知扰动的影响。然后给出控制量补偿这些扰动。将控制对象变为普通的积分串联型控制对象。设计扩展状态观测器的目的就是观测扩展出来的状态变量,用来估计未知扰动和控制对象未建模部分,实现动态系统的反馈线性化,将控制对象变为积分串联型。非线性误差反馈控制律给出被控对象的控制策略。系统结构框图如图1 图1 过程和扩张状态观测器方程: 1y x =22302220(1)()*(()*(,,)*())z k z k h z k fal b u k βεαδ+=+-+1120111(1)()*(()*(,,))z k z k h z k fal βεαδ+=+-12212;()();()(,,,)x x x a t u t a t f x x t ω==+= 330312(1)**(,,) z k z h fal βεαδ+=-
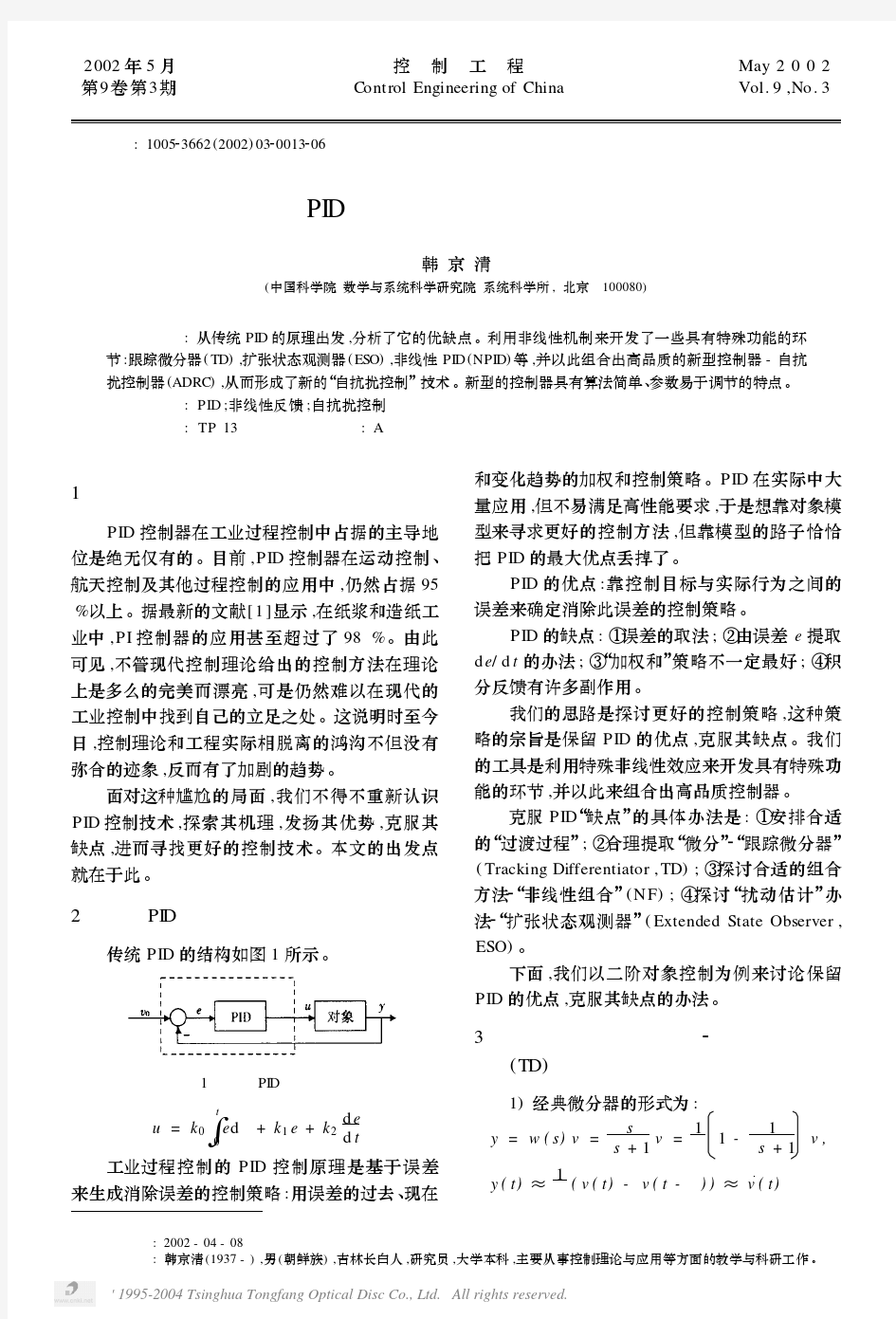
控制技术及其算法 ————PID控制技术及其数字算法摘要:目前工业自动化水平已成为衡量各行各业现代化水平的一个重要标志。在过程控制中,按偏差的比例(P)、积分(I)和微分(D)进行控制的PID控制器(亦称PID调节器)是应用最为广泛的一种自动控制器,PID控制作为最早实用化的控制方案已有70多年历史,它具有原理简单,易于实现,适用面广,控制参数相互独立,参数的选定比较简单等优点;而且在理论上可以证明,对于过程控制的典型对象──“一阶滞后+纯滞后”与“二阶滞后+纯滞后”的控制对象,PID控制器是一种最优控制。PID调节规律是连续系统动态品质校正的一种有效方法,它的参数整定方式简便,结构改变灵活。本文主要介绍PID控制的基本原理,比例(P)、积分(I)和微分(D)的特点以及PID在数字控制中的具体应用。 关键词:PID 控制技术 PID数字控制策略 1.前言 按偏差的比例(P)、积分(I)、积分(D)控制,简称PID控制。PID控制是过程控制中广泛应用的一种控制。尽管各种高级控制在不断完善,目前化工生产中应用最多的仍是常规PID控制,究其原因:一是各种高级控制应用上还不完善,二是多数场合使用常规PID控制即可以满足需要,三是PID的原理简单,应用方便。 2.PID控制的原理 一.PID控制系统 图 1 PID控制系统原理框图
传递函数为:])()(1)([)(0 dt t de T dt t e T t e K t u D t I p ++ =? 式中 e(t)=r(t)-c(t) 指误差。 PID 控制是比例(P )、积分(I )、积分(D )控制的缩写 P 比例调节:按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。 )(*)(t e K t u p = PS :比例调节与众不同的是比例调节是有差调节,必定会存在误差额e (t )。 I 积分调节:是使系统消除稳态误差,提高无差度。因为有误差,积分调节就进行,直至 无差,积分调节停止,积分调节输出一常值。积分作用的强弱取决与积分时间常数,越小I T ,I T 积分作用就越强。反之I T 大则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。积分作用常与另两种调节规律 结合,组成PI 调节器或PID 调节器。 ? = t I dt t e T t u 0 )(1)( D 微分调节:微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。因此,可以改善系统的动态性能。在微分时间选择合适情况下,可以减少超调,减少调节时间。微分作用对噪声干扰有放大作用,因此过强的加微分调节,对系统抗干扰不利。此外,微分反应的是变化率,而当输入没有变化时,微分作用输出为零。微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD 或PID 控制器。 DT T de T t u D )()(= 如上所述比例,微分,积分调节控制各有各的特点,但是也各有各的局限性,所以一般情况下我们可以采取多种调节方法共同作用的方式,通过牺牲一部分数据指标,来取得整体系统的稳定和较快的响应速度。 3.PID 的整定 调节器参数的整定,就是按照已确定的调节方案,求取使调节质量最好的调节器参数值的过程,确定最佳的调节参数:比例度,积分时间和微分时间。 这里只介绍临界比例度法,衰减曲线法 临界比例度法: 1.置调节器为纯比例调节作用, 比例度放到适当数值(一般为100%)
3.3自抗扰控制技术的MATLAB仿真 自抗扰控制技术是由韩京清教授根据多年实际控制工程经验提出的新的控制理论。在传统的工业和其他控制领域,PID一直占据主导地位。目前,PID 在航空航天、运动控制及其他过程控制领域,仍然占据90%以上的份额。但是,PID自身还是存在缺陷,而韩京清教授正是出于对P1D控制算法的充分认知,尤其是对其缺陷的清晰分析,提出了自抗扰控制技术。 3.3.1自抗扰控制技术概述 自抗扰控制技术的提出是根据对PID控制技术的充分认知,扬其优点,抑其缺点而提出的。传统PID控制技术应用领域很广泛,其控制结构如图3-9所示。 图3-9 传统PID结构 其中, ? + + ? =e k e k d e k u t 2 1 ) (τ τ。众所周知,PID控制原理是基于误差来生成 消除误差控制策略:用误差的过去、现在和变化趋势的加权和消除误差。其优点有:靠控制目标与实际行为之间的误差来确定消除此误差的控制策略,而不是靠被控对象的“输入一输出”关系,即不靠被控对象的“输入-输出”模型来决定控制策略,简单易行,只要选择PID增益使闭环稳定,就能使对象达到静态指标。当然PID控制仍有缺点,其缺点如下 1、采用PID校正系统闭环动态品质对PID增益的交化太敏感,当被控对象处于变化的环 境中时,根据环境的变化经常需要变动PID的增益。 2、“基于误差反馈消除误差”是PID控制技术的精髓,但实际情况中直接取目标与实际 行为之间的误差常常会使初始控制力太大而使系统行为出现超调,而这正是导致使用PID控制技术的闭环系统产生“快速性”和“超调”不可调和矛盾的主要原因。3、PID是用误差的比例、积分、微分的加权和形式来形成反馈控制量的,然而在很多场 合下,由于没有合适的微分器,通常采用PI控制规律,限制了PID的控制能力。 4、PID是用误差的过去、现在和将来的适当组合来产生程制量的。经典PID一般采用线 性取和方法,但是实际系统多为非线性系统,所以非线性拉制器更适合实际情况。5、PID中的误差积分反馈对抑制常值扰动确实有效,但在无扰动作用时,误差积分反馈
数字PID控制器设计 设计任务: 设单位反馈系统的开环传递函数为: 设计数字PID控制器,使系统的稳态误差不大于0.1,超调量不大于20%,调节时间不大于0.5s。采用增量算法实现该PID控制器。 具体要求: 1.采用Matlab完成控制系统的建立、分析和模拟仿真,给出仿真结果。 2.设计报告内容包含数字PID控制器的设计步骤、Matlab仿真的性能曲线、采样周期T的选择、数字控制器脉冲传递函数和差分方程形式。 3.设计工作小结和心得体会。 4.列出所查阅的参考资料。
数字PID控制器设计报告 一、设计目的 1 了解数字PID控制算法的实现; 2 掌握PID控制器参数对控制系统性能的影响; 3 能够运用MATLAB/Simulink 软件对控制系统进行正确建模并对模块进行正确的参数设置; 4 加深对理论知识的理解和掌握; 5 掌握计算机控制系统分析与设计方法。 二、设计要求 1采用增量算法实现该PID控制器。 2熟练掌握PID设计方法及MATLAB设计仿真。 三、设计任务 设单位反馈系统的开环传递函数为: 设计数字PID控制器,使系统的稳态误差不大于0.1,超调量不大于20%,调节时间不大于0.5s。采用增量算法实现该PID控制器。 四、设计原理 1.数字PID原理结构框图
2. 增量式PID 控制算法 ()()()()()01P I D i u k K e k K e i K e k e k ∞ ==++--????∑ =u(k-1)+Kp[e(k)-e(k-1)]+Kie(k)+Kd[e(k)-2e(k-1)+e(k-2)] =u(k-1)+(Kp+Ki+Kd)e(k)-(Kp+2Kd)e(k-1)+Kde(k-2) 所以Δu(k)=u(k)-u(k-1) =Kp[e(k)-e(k-1)]+Kie(k)+Kd[e(k)-2e(k-1)+e(k-2)] =(Kp+Ki+Kd)e(k)-(Kp+2Kd)e(k-1)+Kde(k-2) 整理: Δu(k)= Ae(k)-Be(k-1)+Ce(k-2) A= Kp+Ki+Kd B=-(Kp+2Kd ) C=Kd 五、Matlab 仿真选择数字PID 参数 (扩充临界比例度法/扩充响应曲线法 具体整定步骤) 利用扩充临界比例带法选择数字PID 参数,扩充临界比例带法是 以模拟PID 调节器中使用的临界比例带法为基础的一种数字 PID 参数的整定方法。其整定步骤如下:;
一、研究意义 1.研究意义 由于无刷直流电机在四旋翼飞行器控制中的关键作用以及在生产实践中日益广泛的应用,设计快速且平稳的控制系统成为首要任务。目前, 基于现代控制理论的高性能异步电机调速方法主要是依靠精确的数学模型加上传统的P ID控制。PID控制实际应用效果较好,但又无法避免对负载变化的适应能力差、抗干扰能力弱和受系统参数变化影响等弱点,而且交流调速系统具有非线性、强耦合、多变量及纯滞后等特性, 很难用精确的数学模型描述, 这就使得基于精确数学模型的传统控制方法面临严重的挑战。另外, 经典P ID控制需要根据运行工况的不同而调节控制器参数, 无刷直流电机又具有数学模型复杂,非线性等特点,这给现场调试增加了难度。 2.国内外研究状况及发展 (1)无刷直流电机基本控制方法 无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。无刷电机是指无电刷和换向器(或集电环)的电机,又称无换向器电机。 直流无刷电动机的电机本身是机电能量转换部分,无刷电机的转子上装有永磁体,定子上是电枢,与有刷电机正好是相反的。它除了电机电枢、永磁励磁两部分外,还带有传感器。电机本身是直流无刷电机的核心,它不仅关系到性能指标、噪声振动、可靠性和使用寿命等,还涉及制造费用及产品成本。由于采用永磁磁场,使直流无刷电机摆脱一般直流电机的传统设计和结构,满足各种应用市场的要求,并向着省铜节材、制造简便的方向发展。 直流无刷驱动器包括电源部及控制部,电源部提供三相电源给电机,控制部则依需求转换输入电源频率。 电源部可以直接以直流电输入(一般为24V)或以交流电输入(110V/220 V),如果输入是交流电就得先经转换器(converter)转成直流。不论是直流电输入或交流电输入要转入电机线圈前须先将直流电压由换流器(inverter)转成3相电压来驱动电机。换流器(inverter)一般由6个功率晶体管(V1~V6)分为上臂(V1、V3、V5)/下臂(V2、V4、V6)连接电机作为控制流经电机线圈的开关。控制部则提供PWM(脉冲宽度调制)决定功率晶体管开关频度及换流器(inverter)换相的时机。直流无刷电机一般希望使用在当负载变动时速度可以稳定于设定值而不会变动太大的速度控制,所以电机内部装有能感应磁场的霍尔传感器(hall-sensor),做为速度之闭回路控制,同时也做为相序控制的依据。但这只是用来做为速度控制并不能拿来做为定位控制。电机驱动电路如图?所示。 图1 无刷直流电机的控制电路
数字PID控制器设计 实验报告 学院电子信息学院 专业电气工程及其自动化学号 姓名 指导教师杨奕飞
数字PID控制器设计报告 一.设计目的 采用增量算法实现该PID控制器。 二.设计要求 掌握PID设计方法及MATLAB设计仿真。 三.设计任务 设单位反馈系统的开环传递函数为: 设计数字PID控制器,使系统的稳态误差不大于,超调量不大于20%,调节时间不大于。采用增量算法实现该PID控制器。 四.设计原理 数字PID原理结构图 PID控制器的数学描述为:
式中,Kp为比例系数;T1为积分时间常数;T D为微分时间常数。 设u(k)为第K次采样时刻控制器的输出值,可得离散的PID表达式为:? 使用模拟控制器离散化的方法,将理想模拟PID控制器D(s)转化为响应的理想数字PID控制器D(z).采用后向差分法,得到数字控制器的脉冲传递函数。
2.增量式PID控制算法 u(k)=u(k-1)+Δu(k) 增量式PID控制系统框图 五.Matlab仿真选择数字PID参数 利用扩充临界比例带法选择数字PID参数,扩充临界比例带法是以模拟PID调节器中使用的临界比例带法为基础的一种数字PID参数
的整定方法。其整定步骤如下 1)选择合适的采样周期T:,因为Tmin<1/10 T,选择采样周期为; 2)在纯比例的作用下,给定输入阶跃变化时,逐渐加大比例作用 Kp(即减小比例带δ),直至系统出现等幅震荡,记录比例增益 Kr,及振荡周期Tr 。Kr成为临界振荡比例增益(对应的临界比 例带δ),Tr成为临界振荡周期。 在Matlab中输入如下程序? G=tf(1,[1/150,36/150,185/150,1]); p=[35:2:45]; for i=1:length(p) Gc=feedback(p(i)*G,1); step(Gc),hold on end; axis([0,3,0,]) 得到如下所示图形: 改变其中的参数P=[35:2:45]为p=[40:1:45]得到下图曲线,得Kr约为43,Tr
自抗扰控制技术简介 1.自抗扰控制技术概述 1.1 什么是自抗扰控制技术 自抗扰控制器(Auto/Active Disturbances Rejection Controler,ADRC)技术,是发扬PID控制技术的精髓并吸取现代控制理论的成就,运用计算机仿真实验结果的归纳和总结和综合中探索而来的,是不依赖被控对象精确模型的、能够替代PID控制技术的、新型实用数字控制技术。 1.2 自抗扰控制技术的提出者——韩京清 韩京清,朝鲜族, 1937生,系统与控制专家,中国科学院数学与系统科学研究院系统科学研究所研究员、博士生导师,长期从事控制理论与应用研究工作,是我国控制理论和应用早期开拓者之一。 韩京清先生于1998年正式提出自抗扰控制这一思想。在这个思想提出之后,国内外许多研究者都围绕着“自抗扰控制”展开实际工程应用的研究。同时,自抗扰控制的理论分析的研究也在不断的深入。 1.3 自抗扰控制技术的特点和优点 (1)自抗扰控制器采用“观测+补偿”的方法来处理控制系统中的非线性与不确定性,同时配合非线性的反馈方式,提高控制器的动态性能。 (2)自抗扰控制器算法简单、易于实现、精度高、速度快、抗扰能力强。 (3)统一处理确定系统和不确定系统的控制问题;扰动抑制不需外扰模型或者外扰是否观测;控制算法不需辨识控制对象;统一处理非线性和线性系统;可以进行时滞系统控制;解耦控制只要考虑静态耦合,不用考虑动态耦合等。 2.自抗扰控制技术提出的背景
2.1 现代控制理论的缺点和改进 现代控制理论以状态变量描述为基础,以状态反馈实现极点配置来改善全局动态特性的问题。因而,此种控制的主要手段是状态反馈。“这种全局控制方法需要知道关于开环动态特性的先验知识和状态变量的信息,这在许多工程实际中是很不现实的,因为工程实际提供不了有关开环动态特性的多少先念知识,因此这种全局控制方法是很难在实际中得到应用。”这就是现代控制理论的缺点,这也限制了这种控制方法在工程实际中的应用。 事实上,要实现控制目的,不一定要知道系统的开环动态特性。实现控制的主要目的是施加控制力,使目标值与输出值之间的误差衰减下去,因而只需要知道开环动态特性的具体表现量。这就是将状态反馈的理念转换为误差反馈的理念。图(1)、图(2)是这两种控制方式的框图。 图(1)基于状态反馈的全局控制方法 图(2)基于误差反馈的“过程的控制” 2.2 PID控制的优缺点 PID控制的主要优点是:“不用被控对象的精确模型,只用控制目标与对象实际行为的误差来产生消除此误差的控制策略的过程控制思想,是PID留给人类的宝贵思想遗产,是PID控制技术的精髓。”也正是因为这个原因,PID控制才能在控制工程实践中得到广泛有效的应用。
目录 目录 目录 (1) 1 绪论 (1) 2 问题描述 (1) 3 发展现状 (2) 3.1 非线性跟踪微分器 (2) 3.2 扩张状态观测器 (3) 3.3 自抗扰控制律 (4) 3.4 参数整定问题 (4) 4 未来展望 (15分) (4) 5 结论 (5) 参考文献 (6)
1 绪论 自抗扰控制是韩京清先生以对控制理论的反思为开端提出的以反馈系统的标准型(积分器串联型)为基础,以工程控制的鲁棒性为目标的控制技术[1-5]。其思想是以工业界占主导地位的PID控制为出发点,在改进非线性PID的基础上提出自抗扰的概念,算法简单,在未知强非线性和不确定强扰动的作用下仍能够保持控制精度。在国内,自抗扰控制技术在四旋翼无人机控制[6]、航天器姿态控制[7]、精密车床中快速刀具的伺服控制[8]、电机的励磁控制[9]等方面均有应用案例。在国外,自抗扰控制于2009年通过了运动控制的工业评估[10];2013年,德州仪器开始在全球发布以自抗扰为技术核心的运动控制芯片[11]。可见,自抗扰控制技术具备巨大的潜力与工程应用前景。 2 问题描述 1989年,韩京清先生提出了对控制领域的疑问——模型论还是控制论。模型论“靠系统的数学模型去找控制率”,后者依靠的是系统的“某些响应特征或过程的某些实时信息”。 而“通过误差来消除误差”正是简单的线性PID所蕴含的朴素思想,也是PID能够在工业界获得广泛应用的原因。而以现代控制理论为代表的控制理论虽然在数学上严密可证,然而在实际应用中却较少,因为实际的控制对象总是不可避免地存在未知与不确定性。因此,反思控制理论数学化带来的理论与工业实践的脱节,探索新的控制技术与理论是有必要的。而自抗扰控制技术就是基于以上的问题,以PID为出发点,探索控制技术与理论的新方向。
数字PID控制器的MATLAB仿真 江苏科技大学 电子信息学院 实验报告 评定成绩指导教师实验课程:计算机控制技术 宋英磊实验名称:数字PID控制器的MATLAB仿真 学号: 1345733203 姓名: 胡文千班级: 13457332 完成日期: 2015年 11 月16日 一、实验目的 (1)掌握用SIMULINK对系统进行仿真的基本方法。 (2)对PID数字控制器进行仿真。 二、实验内容 1、基本的PID控制 在模拟控制系统中,控制器最常用的控制规律是PID控制。模拟PID控制系统原理 框图如图1-1所示。 比例y(t)r(t)+e(t)u(t)微分被控对象 +-积分 图1-1 模拟PID控制系统原理框图 PID控制规律为: t,,1de(t),,u(t),ke(t),e(t)dt,T pD,,,0TdtI,, ,,()1Us,,()1Gs,,k,,Ts或写成传递函数的形式 pD,,E(s)TsI,,
133仿真1 以二阶线性传递函数为被控对象,进行模拟PID控制。输入信号 2s,25s k,60,k,1,k,3,仿真时取,采用ODE45迭代方法,仿真时间 r(t),sin(2,*0.2t)pid 10s。 仿真方法:在Simulink下进行仿真,PID控制由Simulink Extras节点中的PID Controller 提供。 仿真程序:ex1_1.mdl,如图1-2所示。 图1-2 连续系统PID的Simulink仿真程序 将该连续系统的模拟PID控制正弦响应结果截图后至于下面的空白处: 连续系统的模拟PID控制正弦响应如图1-3所示。
图1-3 连续系统的模拟PID控制正弦响应 2、连续系统的数字PID控制仿真 计算机控制是一种采样控制,它只能根据采样时刻的偏差值计算控制量。因此 连续PID控制算法不能直接使用,需要采用离散化方法。在计算机PID控制中,使 用的是数字PID控制器。 按模拟PID控制算法,以一系列的采样时刻点kT代表连续时间t,以矩形法数 值积分近似代替积分,以一阶后向差分近似代替微分,可得离散PID位置式表达式: k,,TTD,,ukkekejekek(),(),(),((),(,1)),p,,TT,0jI,, kekek(),(,1)kekkejTk,(),(),,pidT,0j kpk,,k,kT式中,,e为误差信号(即PID控制器的输入),u为控制信号(即控 制idpDTI 器的输出)。 在仿真过程中,可根据实际情况,对控制器的输出进行限幅。连续系统的数字PID控制 可实现D/A及A/D的功能,符合数字实时控制的真实情况,计算机及DSP的实 时PID控制 都属于这种情况。 1Gs, 仿真2 设被控对象为一个电机模型传递函数,式中J=0.0067,B=0.1。输()2Js,Bs入信号为,采用PID控制,其中。采用ODE45方法求解连 k,20,k,0.50.5sin(2,t)pd续被控对象方程。 2dydyYs()1仿真方法: 因为,所以J,B,u,另Gs,,()22dtdtUsJs,Bs() ,y,y,,12,,则,因此连续对象微分方程函数ex3f.m如下 y1,y,y2,y,, y2,,(B/J)y,(1/J)*u,2, function dy = ex3f(t,y,flag,para)
第30卷第12期2013年12月 控制理论与应用 Control Theory&Applications V ol.30No.12 Dec.2013自抗扰控制技术在微机电换能器中的应用 DOI:10.7641/CTA.2013.31016 董莉莉? (克里夫兰州立大学,俄亥俄州克里夫兰市44115,美国) 摘要:自抗扰技术,作为一门新兴的鲁棒控制技术,能够成功补偿微机电制造上的缺陷以及周围环境的扰动,从而提高微机电传感器和执行器的性能,增加它们的测量及移动精度.本文介绍了自抗扰技术在微机电陀螺仪和静电执行器两大微机电换能器上的应用.通过使用此项控制技术,微机电陀螺仪可精确测量并输出匀速及时变角速度.此外,一种模型辅助自抗扰控制器被首次应用到微执行器上.此模型辅助自抗扰控制器建立在部分模型已知的基础上.它能够在外干扰存在的情况下,把静电执行器的位移范围提高到电容间距的99%.模型辅助自抗扰控制器的抗噪声能力也优于传统的自抗扰控制器.作者用仿真和实验结果向读者展示了自抗扰技术在微机电领域的鲁棒性,有效性和实用性. 关键词:微机电系统;微机电陀螺仪;静电执行器;自抗扰控制;鲁棒性 中图分类号:TP202+.1文献标识码: Application of active disturbance rejection control to micro-electro-mechanism system transducers DONG Li-li? (Cleveland State University,Cleveland,OH44115,USA) Abstract:Active disturbance rejection control(ADRC)is an emerging robust control technology.It improves the performance of micro-electro-mechanism system(MEMS)sensors and actuators and increases their measurement and displacement accuracies through effectively compensating the imperfections in micro-fabrications and environmental vari-ations.The applications of an ADRC to MEMS gyroscopes and electrostatic actuators are introduced in this paper.The ADRC facilitates accurate sensing of both constant and time-varying rotation rates for MEMS gyroscopes.In addition, an alternative ADRC is initially applied to an electro-static actuator.The alternative ADRC is constructed based on par-tially known model information.It drives and stabilizes the displacement output of an electrostatic actuator to99%of full capacitor gap despite of the presence of disturbance.The alternative ADRC also has better noise rejection capability than traditional ADRC.Simulation and experimental results demonstrate the robustness,effectiveness and feasibility of the ADRC in MEMS area. Key words:micro-electro-mechanism system(MEMS);MEMS gyroscope;electro-static actuator;active disturbance rejection control;robustness 1引言(Introduction) 微机电陀螺仪和静电执行器同属于微机电(micro-electro-mechanical system,MEMS)换能器.微机电陀螺仪是角速度和角位移传感器.静电执行器负责将静电信号转换成机械移动.随着微机电制造技术的日新月异,MEMS换能器在近20年来得到了飞速的发展.它们体积小(只有微米或者毫米量级)、重量轻、成本低、耗能少、便于携带,已经被广泛应用到航天系统、军事制导、家用电器和汽车工业中[1]. 微机电陀螺仪的测量精度主要取决于硅片的机械振动.然而微机电制造技术的缺陷会造成微陀螺仪内部驱动机构的错位,驱动和感应部位的非对称,以及质量与中心轴的偏离[2].这些机械系统的缺陷将引起微陀螺系统参数的不确定性,再加上周围环境变化所带来的外扰动,最终会导致测量误差的产生.传统的机械补偿能够减少一部分由于制造缺陷所带来的误差.然而机械补偿不但耗时、成本高,而且很难在一个小如硬币的微陀螺仪上实行.因此,需要一个能够成功消除(或大大减少)机械误差,提高微陀螺测量精度和稳定性的鲁棒控制器进行电补偿. 一个自由度的平板静电执行器(又称作微执行器)由固定和移动电板组成.两个平行电板在电场中充电后会形成电容.当改变电容器的控制电压时,移动电板可离开原始位置,上下移动.然而由于系统本 收稿日期:2013?09?26;收修改稿日期:2013?12?07.?通信作者.E-mail:L.Dong34@https://www.doczj.com/doc/8d7385640.html,.
基于自抗扰控制技术的永磁同步电机矢量 控制仿真 摘要:文章针对经典的PID控制器应用于永磁同步电机矢量控制的缺点。依据永磁同步在两相同步旋转坐标系下的数学模型,设计了转速控制环的ADRC控制器,结合按转子磁场定向的矢量控制在simulink 中建立了永磁同步电机调速系统仿真模型,对一台隐极式永磁同步电机进行仿真。仿真发现,发现ADRC 作为速度环的控制器能够避免使用PI控制器时出现超调的问题,而且在转矩突变干扰下转速能迅速回到原稳定平衡点。仿真说明使用ADRC控制器代替PI控制器控制永磁同步电机使得系统具有更好的抵抗负载转矩扰动的能力。 关键词:矢量控制;ADRC;抵抗转矩扰动 0引言 交流永磁伺服电机驱动控制策略研究现状电机控制技术是高性能交流永磁伺服电机驱动器的核心,PMSM作为一个典型的非线性复杂控制对象,具有多变量、强耦合、非线性、变参数等特性,在目前来看,常规的电机调速控制方法主要有矢量控制和直接转矩控制策略。矢量控制(Vector Control,VC)也称为磁场定向控制(Held Oriented Control,FOC),其基本思路是:通过坐标变换实现模拟直流电机的控制方法来对永磁同步电机进行控制,实现了电机定子电流转矩分量与励磁分量的解耦。VC的目的是为了改善转矩控制性能,从而使驱动系统具有转矩平滑、调速围宽等特点,是高性能交流伺服驱动系统的主要控制方式。 和VC不同,直接转矩控(Direct Torque Control,DTC)制摒弃了解耦的思想,取消了旋转坐标变换,简单的通过电机定子电压和电流,借助瞬时空间矢量理论计算电机的磁链和转矩,并根据与给定值比较所得差值,实现磁链和转矩的直接控制。直接转矩控制可以获得比VC更快的动态响应,在对于动态响应要求高的场合具有独特的优势。但DTC要保证实际力矩与给定一致就需根据误差选择驱动器件的开关状态,同时保证电机磁链能够按预定轨迹运行,在转矩和磁链的滞环比较器进行控制时会产生转矩脉动,这样将大大的影响电机的低速性能和系统的稳定性,使得电机的宽调速围受到严重影响,同时导致位置控制精度降低。 相比之下,VC的电流环能够保证力矩电流迅速跟随实际给定,保证了实际电机力矩需求,同时使得电机的电磁力矩稳定,实际的调速围更宽,甚至能超低速运行;同时电机所有的电磁转矩都由电枢电流产生,通过对位置环的实时控制,可最终使得电机电流构造的电枢
一、综述本课题国内外研究动态,说明选题的依据和意义 1.风力发电技术概述及其研究意义 目前随着石化能源的逐渐枯竭以及对环保的日益重视,迫切需要人们开发清洁的再生能源,因此,对可再生能源的开发利用,特别是对风能的开发应用已经受到世界的高度重视。风力资源丰厚,风力发电的潜力很大,但是风能能量密度较低,目前风力发电面临的一个急待解决的问题是风能利用效率的提高。风力机捕获的风能取决于风速、叶片浆距角和风轮转速,通过控制机构调节浆距角和风轮转速,使风力机捕获的风能跟踪最大功率曲线,可以有效地提高风力发电系统的发电效率。20年来风力发电技术领域有了很大的成就,中国从八十年代才开始发展风力发电,但是规模远不及欧美等国,尚处于探索时期,因此,风力发电在中国能源发展中的地位及发展的前景预测这一课题有重大的战略意义和社会意义。 但是风能在利用中存在很多的问题,风能是一种存在很多不确定性的能源,风力发电系统处于自然界中,外部的干扰很多且不易预知和控制,怎样实现风能的最大捕获成为一个我们在现实风力发电时首要考虑的问题。 在现在的风力发电中,我们运用到实际的控制方法有很多,有古典控制理论部分的应用,也有PID控制的应用,且其在控制界曾处于很高的位置,但是PID使用的范围有限制,对线性系统或者能线性化的系统,其控制效果还是很好的,但是由于风能的并不确定因素很多,这样导致PID在风里发电系统中便显示出了很多的缺点。图1所示为传统PID的控制图。 图 1 PID控制结构
从这个框图可以概括出PID控制技术的如下四个方面的缺陷: 第一,误差取法不合理。系统输入信号常常是不光滑、不连续的,而输出信号通常是光滑的,因而导致系统超调或振荡;第二,微分信号的实现需要改进。现场微分信号的实现通常采用差分或超前网络,这种方式对噪声放大作用很大,使微分信号失真而不能使用;第三,误差信号采用的线性组合不一定最合适,这种线性组合不易解决快速性和超调的矛盾;第四,积分反馈的作用主要是消除稳念误差,但它的引入也带来很多副作用,增加了系统的不稳定性以及积分饱和现象的出现。 面对这样的问题,我们也曾提出很多控制方法,比如自适应的应用,鲁棒控制和模糊控制,这些的控制效果也很好,但是由于这些的算法相对比较复杂,有些系统不易建立精确的数学模型,导致这些应用过程中会复杂。这时自抗扰技术的发展就为我们更好的利用风能提供了一个很好的方法。 自抗扰控制理论是我国学者韩京清先生首先提出的一种利用简单非线性部件对非线性系统的状态量及其所受干扰进行检测,进而利用非线性误差反馈规律进行总体补偿的非线性控制策略。其控制结构由跟踪微分器(TD),扩张状态观测器(ESO)和非线性反馈组成,如图2所示。 图 2 自抗扰控制结构 TD用来实现对系统输入信号的快速无超调跟踪,并给出其“广义”微分
第三章、计算机测控系统设计与实现 一、参考书目: 书名:《计算机控制系统》 章节:第六章 页号:P140-156 二、主要学习内容: 1.数字PID 控制算法 PID 控制规律的基本输入/输出关系可用微分方程表示: ()()()??????++=?dt t de T dt t e T t e K Y D I P 1 在模拟调节系统中,PID 控制算法的模拟表达式为: ()()()()??????++=?dt t de T dt t e T t e K t Y D I P 1 2.对标准PID 算法的改进 1、微分项的改进 不完全微分型PID 算法传递函数 ????? ? ??++???? ??+=1111)(S K T S T S T K S G D D D I P C
2、积分项的改进 抗积分饱和 积分作用虽能消除控制系统的静差,但它也有一个副作用,即会引起积分饱和。在偏差始终存在的情况下,造成积分过量。当偏差方向改变后,需经过一段时间后,输出u(n)才脱离饱和区。这样就造成调节滞后,使系统出现明显的超调,恶化调节品质。这种由积分项引起的过积分作用称为积分饱和现象。 克服积分饱和的方法: 1、积分限幅法 积分限幅法的基本思想是当积分项输出达到输出限幅值时,即停止积分项的计算,这时积分项的输出取上一时刻的积分值。其算法流程如图3-2-4所示。 2、积分分离法 积分分离法的基本思想是在偏差大时不进行积分,仅当偏差的绝对值小于一预定的门限值ε时才进行积分累积。这样既防止了偏差大时有过大的控制量,也避免了过积分现象。其算法流程如图3-2-5。 三、知识点: 1、为什么要用PID调节器 1、经典控制方法,可靠成熟。 2、相比两位式控制,控制精度大大提高。 3、算法成熟,资源丰富。 2、数字PID控制算法的比例、积分、微分的作用特点和不足 PID是英文单词比例(Proportion),积分(Integral),微分(Differential coefficient)的缩写。PID调节实际上是由比例、积分、微分三种调节方式组成,它们各自的作用如下: 比例调节作用:是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。 积分调节作用:是使系统消除稳态误差,提高无差度。因为有误差,积分调节就进行,直至无差,积分调节停止,积分调节输出一常值。积分作用的强弱取
研究意义 1?研究意义 由于无刷直流电机在四旋翼飞行器控制中的关键作用以及在生产实践中日益广泛的应用,设计快速且平稳的控制系统成为首要任务。目前,基于现代控制理论的高性能异步电机调速方法主要是依靠精确的数学模型加上传统的 P ID控制。PID控制实际应用效果较好,但又无法避免对负载变化的适应能力差、抗干扰能力弱和受系统参数变化影响等弱点,而且交流调速系统具有非线性、强耦合、多变量及纯滞后 等特性,很难用精确的数学模型描述,这就使得基于精确数学模型的传统控制方法面临严重的挑战。另 外,经典P ID控制需要根据运行工况的不同而调节控制器参数,无刷直流电机又具有数学模型复杂,非 线性等特点,这给现场调试增加了难度。 2?国内外研究状况及发展 (1)无刷直流电机基本控制方法 无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。无刷电机是指无电刷 和换向器(或集电环)的电机,又称无换向器电机。 直流无刷电动机的电机本身是机电能量转换部分,无刷电机的转子上装有永磁体,定子上是电枢,与有刷电机正好是相反的。它除了电机电枢、永磁励磁两部分外,还带有传感器。电机本身是直流无刷电机的核心,它不仅关系到性能指标、噪声振动、可靠性和使用寿命等,还涉及制造费用及产品成本。由于采用永磁磁场,使直流无刷电机摆脱一般直流电机的传统设计和结构,满足各种应用市场的要求,并向着省铜节材、制造简便的方向发展。 直流无刷驱动器包括电源部及控制部,电源部提供三相电源给电机,控制部则依需求转换输入电源频率。 电源部可以直接以直流电输入(一般为24V)或以交流电输入(110V/220 V),如果输入是交流 电就得先经转换器(con verter)转成直流。不论是直流电输入或交流电输入要转入电机线圈前须 先将直流电压由换流器(inverter)转成3相电压来驱动电机。换流器(inverter)一般由6个功率 晶体管(V1?V6)分为上臂(V1、V3、V5)/下臂(V2、V4、V6)连接电机作为控制流经电机线圈的开关。控制部则提供PWM脉冲宽度调制)决定功率晶体管开关频度及换流器(inverter)换相的时机。直流无刷电机一般希望使用在当负载变动时速度可以稳定于设定值而不会变动太大的速度控制,所以电机内部装有能感应磁场的霍尔传感器(hall-se nsor),做为速度之闭回路控制,同时也做 为相序控制的依据。但这只是用来做为速度控制并不能拿来做为定位控制。电机驱动电路如图?所示。 图1无刷直流电机的控制电路
自抗扰控制器设计原理 1非线性跟踪微分器 跟踪微分器(tacking-differentiator, TD)是这样的一个非线性动态环节:对于输入信号v(t),它将在平均收敛和弱收敛意义下,输出信号v(t)及其高阶导数(或广义导数)的光滑逼近。本文采用二阶TD的离散算法,即 其中,h为步长;h 为滤波因子;r为速度因子。 本文设计的气压伺服自抗扰控制器中,TD主要有两个作用:一是在伺服定位控制中利用TD控制过渡过程,降低系统起始误差。根据定位信号和系统所能承受的“能力”,利用TD控制一个合适的过渡过程,使系统的输出跟踪这个控制的过渡过程,就可实现快速而又无超调地跟踪阶跃信号的目的,并且使控制器的鲁棒性和适应性得到较大改善。二是提取输入信号的微分(速度)。作为前馈参与控制,减小控制系统响应的相位滞后。 2 扩张状态观测器 扩张状态观测器是自抗扰控制器的核心,其作用是利用系统输出,估计受未知外扰作用的非线性不确定对象的扩张状态,以实现反馈控制及扰动补偿。 针对式(4),设系统变量:x 1=x,x 2 =x,x 3 =x;系统输出y=x 1 。则系 统状态方程可写为
定义系统总扰动为扩张状态: x 4 =a(t)=f(x,x,x,w(t)) (3) 系统的扩张状态方程为 根据式(4),设计四阶扩张状态观测器,其离散算法如下: 合理配置式(5)参数,使其稳定,则Z 21、Z 22 和Z 23 分别实时跟踪系统 的状态x 1,x 2 和x 3 ,而Z 24 实时跟踪系统的总扰动即扩张状态a(t)。 3 气压伺服系统自抗扰控制器 自抗扰控制器是基于跟踪微分器安排过渡过程,利用扩张状态观测器估计系统状态、模型和外扰,并采用非线性状态误差反馈控制规律的一种非线性控制器,在线性系统理论中,状态反馈控制采用的是系统状
DOI : 10.11992/tis.201711029网络出版地址: https://www.doczj.com/doc/8d7385640.html,/kcms/detail/23.1538.TP.20180413.0941.002.html 一种新型控制方法—自抗扰控制技术及其 工程应用综述 陈增强1,2,刘俊杰1,2,孙明玮1 (1. 南开大学 计算机与控制工程学院,天津 300350; 2. 天津市智能机器人重点实验室,天津 300350) 摘 要:自抗扰控制(active disturbance rejection control ,ADRC)是韩京清研究员于1998年正式提出的一种不依赖被控对象模型的新型实用技术,具有很好的工程应用前景。为了便于理论分析与工程实际应用的推广实现,高志强教授在ADRC 的基础上提出易于参数整定的线性自抗扰控制(LADRC),极大地推动了自抗扰控制理论发展与实际应用。本文简要介绍了自抗扰控制的基本思想及线性自抗扰控制的基本原理,较为系统地阐述了自抗扰控制理论的研究进展,就自抗扰控制在实际工程领域中的应用进行了分类总结,最后给出需要进一步深入研究的方向。 关键词:自抗扰控制;线性自抗扰控制;扩张状态观测器;稳定性分析;工程控制应用 中图分类号:TP273 文献标志码:A 文章编号:1673?4785(2018)06?0865?13 中文引用格式:陈增强, 刘俊杰, 孙明玮. 一种新型控制方法—自抗扰控制技术及其工程应用综述[J]. 智能系统学报, 2018,13(6): 865–877. 英文引用格式:CHEN Zengqiang, LIU Junjie, SUN Mingwei. Overview of a novel control method: active disturbance rejection con-trol technology and its practical applications[J]. CAAI transactions on intelligent systems, 2018, 13(6): 865–877. Overview of a novel control method: active disturbance rejection control technology and its practical applications CHEN Zengqiang 1,2,LIU Junjie 1,2,SUN Mingwei 1 (1. College of Computer and Control Engineering, Nankai University, Tianjin 300350, China; 2. Key Lab of Intelligent Robotics of Tianjin, Tianjin 300350, China) Abstract : The active disturbance rejection control (ADRC) technology, which was proposed by Han Jingqing in 1998,is a novel practical technology independent of the controlled object model, and it has a good application prospect. To fa-cilitate theoretical analysis and practical engineering applications, Professor Gao Zhiqiang proposed a linear active dis-turbance rejection control (LARDC), which is based on the ADRC and greatly improves the development and applica-tion of the ADRC. This paper presents the basic idea of the ADRC and the fundamental principle of the LADRC. Re-search progress on the theoretical analysis for ADRC is systematically described, and practical engineering applications based on ADRC are summarized, and finally, further potential research directions are presented. Keywords : ADRC; linear active disturbance rejection control (LADRC); extended state observer (ESO); stability ana-lysis; engineering control application PID 控制是一种基于误差的反馈控制,其不 依赖被控过程的模型,结构简单且鲁棒性强,至 今仍在工程上占据着主要地位。而针对PID 控制难以处理的复杂控制对象,现代控制理论产生并涌现了如最优控制、鲁棒控制、自适应控制等理论成果,大多数的现代控制理论方法均依赖于系统的数学模型,难以在实际应用中推广。1989年,收稿日期:2017?11?27. 网络出版日期:2018?04?13. 基金项目:国家自然科学基金项目(61573199, 61573197);天津 市自然科学基金项目(14JCYBJC18700). 通信作者:陈增强. E-mail :chenzq@https://www.doczj.com/doc/8d7385640.html,.第 13 卷第 6 期 智 能 系 统 学 报Vol.13 No.62018 年 12 月 CAAI Transactions on Intelligent Systems Dec. 2018