
仿真报告
一.仿真题目
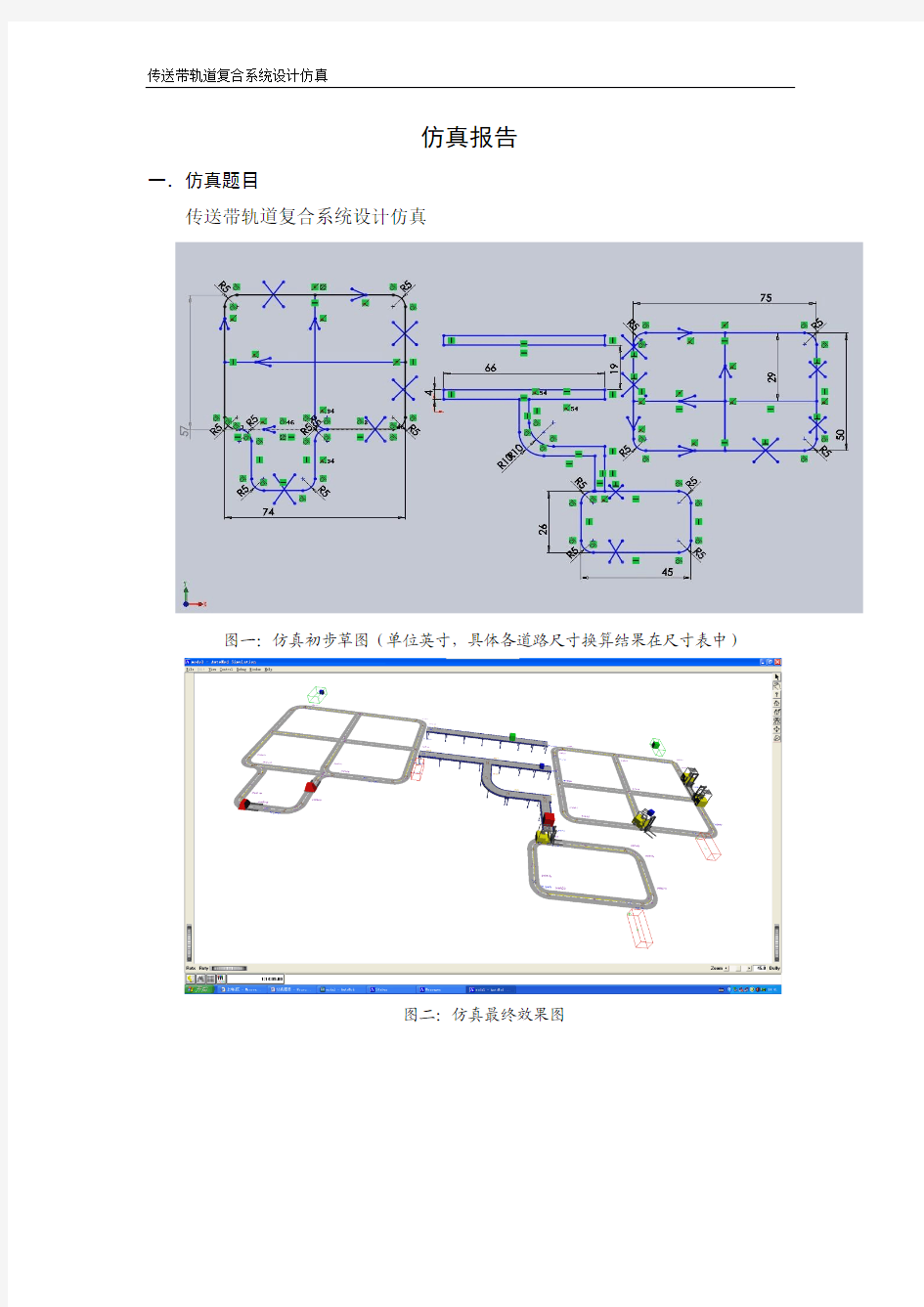
传送带轨道复合系统设计仿真
图一:仿真初步草图(单位英寸,具体各道路尺寸换算结果在尺寸表中)
图二:仿真最终效果图
表一:各轨道尺寸表
错误!未找到引用源。
小车
name SLT system Acceleration Deceleration FvelocityCvelocitySvelocityRvelocityCvelocitySvelocityCvelocityRvelocityDistance DefVehicle1default pm132333333320 DefVehicle1default pm132333333320 DefVehicle1Empty pm131111111111 DefVehicle1Empty pm131111111111 DefVehicle2default pm233333222220 DefVehicle2default pm233333222220 DefVehicle2default pm233333222220 DefVehicle2Empty pm243333333331 DefVehicle2Empty pm243333333331 DefVehicle2Empty pm243333333331 DefVehicle3default pm311111111110 DefVehicle3Empty pm311111111110
(各子系统小车参数)
Segment Type Segment Type Load Pick Up Time Load Set Down Time DefSegment1 1 5sec 5sec
DefSegment2 1 5sec 5sec
DefSegment3 1 20sec 20sec
(小车装卸货物时间)
表二:各设备和货物参数表
二.仿真目的
1.练习运用学到的仿真知识
2.学习练习使用仿真软件AUTOMOD
3.练习和熟练学习在软件中建立初步方案下的复合轨道系统,并输入相关的货物、设备参数(如货物到来时间间隔分布参数,叉车加速度、减速度、空车和载货运行速度等)
4.进行仿真,得到仿真结果,检查是否合适,进而优化设计最终得到一个可以正常运行合理高效的运输系统。
5.训练仿真过程中组员之间的合作精神和创新精神。
三.设计和优化过程
1.建立三个path move 系统和一个conveyor(conv)
2.分别按照尺寸绘制轨道图最终效果如下
3.初步建立A、B、C三种货物按比例设置货物到到时间分布参数(具体数据见参数表)
4.建立货物到达和出各个轨道子系统系统的队列方便查看货物到达和离开规律
5.设置各个子系统中的载货、卸货、停车地点
6.设置三个path move中小车的数目和各种参数,以及worklist 、park list、load activation list、load serch list等。
7.设置conveyor中运输带的运输速度(30m/m)
8.在Source files中建立一个logic.m进行编程控制(代码如下)
begin P1 arriving
move into Q1
move into PM1.cp_in
if load type = L_A then
begin
travel to PM1.cp_outA
move into conv.sta_inA
travel to conv.sta_outA
move into PM2.cp_inA
travel to PM2.cp_outA
move into Q3
wait for 2.5 min
end
if load type = L_B then
begin
travel to PM1.cp_outB
move into Q2
wait for 10 sec
move into conv.sta_inB
travel to conv.sta_outB
move into PM2.cp_inB
travel to PM2.cp_outB
move into Q4
wait for 2.5 min
end
if load type = L_C then
begin
travel to PM1.cp_outC
move into Q2
wait for 10 sec
move into conv.sta_inB
travel to conv.sta_outC
move into PM3.cp_inC
travel to PM3.cp_outC
move into Q5
wait for 2.5 min
end
end
9.设置run contral(8小时)
10.运行(run modal)生成报告(repot)(见附录)
11.查看运行结果看是否合适,各小车利用率和货物到达数及各种数据分析统计
12.看是否可以继续优化
13.重新设计各参数进行重新仿真,最终得到分析结果。
14.对设计好的系统制作动画并保存(动画见附录)
四.结论
仿真总时间28800秒,货物到达总数325(完整这个那个过程数A:164,B:95,C:63,到达比例大致为5:3:2)
1.最终分析结果如下表
1.1队列的数据如下
Queue Statistics
Name Total Cur Average Capacity Max Min Util Av_Time Av_Wait ========================================================================================
Space 325 0 0.00 Infinite 1 0 -- 0.00
Q1 325 1 0.61 5 4 0 0.122 53.92 0.00 Q2 159 0 0.08 5 2 0 0.017 15.01 0.00 Q3 164 0 0.88 5 2 0 0.177 155.00 0.00 Q4 95 1 0.51 5 2 0 0.101 153.83 0.00 Q5 63 0 0.37 5 1 0 0.074 170.00 0.00
1.2小车利用率如下
系统名小车平均利用率单个小车利
用率平均容量由于堵塞损失率(相当于总车辆数)
Pat1 Defvehicle1 0.727 0.707,0.748 0.082(0.2)Pat2 Defvehicle2 0.660 0.720,
0.642,0.617
0.124(0.4)Pat3 Defvehicle3 0.386 0.386 0(0)
由上表中的数据可以知道,小车的利用率都在0.83以下(即
运载能力大于运载需求的1.2 倍,综合分析符合要求。
(由上数据和报告(report)分析得出结论系统符合要求)
2.心得体会
这次短学期学习了AuotoMod仿真软件,学会了一些这个软件的基本内容和知识,学会了conv和pm等来仿真,还有一些编程语言。在这次仿真大作业中,让我对AuotoMod有了更深一步的了解,知道了怎么把各个只是连接起来组成一个简单的仿真系统。在仿真的过程中,遇到了很多问题,比如:worklist和partlist一直会出现错误,但在一次一次的实践和改善中,我们把这些问题都一一解决了,在解决的过程中,我们小组充分表现出了团队的作用,通过不断的交流和提出各自的意见,最后成功攻克遇到的问题。在做完这些的同时,我对AutoMod这款仿真软件有了进一步的认识,发现这款软件是十分的强大的,而我们所拥有的知识只是一小部分基础的而已。在今后的学习中希望能更进一步了解这款软件的更多高一级的知识,能仿真多更加复杂的系统。另外,在这次的学习中,老师的悉心教导对我在掌握知识的过程中更加容易了,所以,还是很感谢老师孜孜不倦的教导和细心的指导。
控制系统仿真课程设计 (2011级) 题目控制系统仿真课程设计学院自动化 专业自动化 班级 学号 学生姓名 指导教师王永忠/刘伟峰 完成日期2014年6月
控制系统仿真课程设计一 ———交流异步电机动态仿真 一 设计目的 1.了解交流异步电机的原理,组成及各主要单元部件的原理。 2. 设计交流异步电机动态结构系统; 3.掌握交流异步电机调速系统的调试步骤,方法及参数的整定。 二 设计及Matlab 仿真过程 异步电机工作在额定电压和额定频率下,仿真异步电机在空载启动和加载过程中的转速和电流变化过程。仿真电动机参数如下: 1.85, 2.658,0.2941,0.2898,0.2838s r s r m R R L H L H L H =Ω=Ω===, 20.1284Nm s ,2,380,50Hz p N N J n U V f =?===,此外,中间需要计算的参数如下: 21m s r L L L σ=-,r r r L T R =,22 2 s r r m t r R L R L R L +=,10N m TL =?。αβ坐标系状态方程: 其中,状态变量: 输入变量: 电磁转矩: 2p m p s r s L r d ()d n L n i i T t JL J βααωψψβ=--r m r r s r r d 1d L i t T T ααβαψψωψ=--+r m r r s r r d 1d L i t T T ββαβψψωψ=-++22s s r r m m m s r r s s 2r r r r d d i R L R L L L L i u t L T L L ααβαα σψωψ+=+-+22 s s r r m m m s r r s s 2 r r r r d d i R L R L L L L i u t L T L L ββαββ σψωψ+=--+[ ] T r r s s X i i αβαβωψψ=[ ] T s s L U u u T αβ=()p m e s s s s r n L T i i L βααβ ψψ=-
现在的高速电路设计已经达到GHz的水平,高速PCB设计要求从三维设计理论出发对过孔、封装和布线进行综合设计来解决信号完整性问题。高速PCB设计要求中国工程师必须具备电磁场的理论基础,必须懂得利用麦克斯韦尔方程来分析PCB设计过程中遇到的电磁场问题。目前,Ansoft公司的仿真工具能够从三维场求解的角度出发,对PCB设计的信号完整性问题进行动态仿真。 (一)Ansoft公司的仿真工具 现在的高速电路设计已经达到GHz的水平,高速PCB设计要求从三维设计理论出发对过孔、封装和布线进行综合设计来解决信号完整性问题。高速PCB设计要求中国工程师必须具备电磁场的理论基础,必须懂得利用麦克斯韦尔方程来分析PCB设计过程中遇到的电磁场问题。目前,Ansoft公司的仿真工具能够从三维场求解的角度出发,对PCB设计的信号完整性问题进行动态仿真。 Ansoft的信号完整性工具采用一个仿真可解决全部设计问题: SIwave是一种创新的工具,它尤其适于解决现在高速PCB和复杂IC封装中普遍存在的电源输送和信号完整性问题。 该工具采用基于混合、全波及有限元技术的新颖方法,它允许工程师们特性化同步开关噪声、电源散射和地散射、谐振、反射以及引线条和电源/地平面之间的耦合。该工具采用一个仿真方案解决整个设计问题,缩短了设计时间。 它可分析复杂的线路设计,该设计由多重、任意形状的电源和接地层,以及任何数量的过孔和信号引线条构成。仿真结果采用先进的3D图形方式显示,它还可产生等效电路模型,使商业用户能够长期采用全波技术,而不必一定使用专有仿真器。 (二)SPECCTRAQuest Cadence的工具采用Sun的电源层分析模块: Cadence Design Systems的SpecctraQuest PCB信号完整性套件中的电源完整性模块据称能让工程师在高速PCB设计中更好地控制电源层分析和共模EMI。 该产品是由一份与Sun Microsystems公司签署的开发协议而来的,Sun最初研制该项技术是为了解决母板上的电源问题。 有了这种新模块,用户就可根据系统要求来算出电源层的目标阻抗;然后基于板上的器件考虑去耦合要求,Shah表示,向导程序能帮助用户确定其设计所要求的去耦合电容的数目和类型;选择一组去耦合电容并放置在板上之后,用户就可运行一个仿真程序,通过分析结果来发现问题所在。 SPECCTRAQuest是CADENCE公司提供的高速系统板级设计工具,通过它可以控制与PCB layout相应的限制条件。在SPECCTRAQuest菜单下集成了一下工具: (1)SigXplorer可以进行走线拓扑结构的编辑。可在工具中定义和控制延时、特性阻抗、驱动和负载的类型和数量、拓扑结构以及终端负载的类型等等。可在PCB详细设计前使用此工具,对互连线的不同情况进行仿真,把仿真结果存为拓扑结构模板,在后期详细设计中应用这些模板进行设计。 (2)DF/Signoise工具是信号仿真分析工具,可提供复杂的信号延时和信号畸变分析、IBIS 模型库的设置开发功能。SigNoise是SPECCTRAQUEST SI Expert和SQ Signal Explorer Expert进行分析仿真的仿真引擎,利用SigNoise可以进行反射、串扰、SSN、EMI、源同步及系统级的仿真。 (3)DF/EMC工具——EMC分析控制工具。 (4)DF/Thermax——热分析控制工具。 SPECCTRAQuest中的理想高速PCB设计流程: 由上所示,通过模型的验证、预布局布线的space分析、通过floorplan制定拓朴规则、由规
信号与系统仿真实验报告1.实验目的 了解MATLAB的基本使用方法和编程技术,以及Simulink平台的建模与动态仿真方法,进一步加深对课程内容的理解。 2.实验项目 信号的分解与合成,观察Gibbs现象。 信号与系统的时域分析,即卷积分、卷积和的运算与仿真。 信号的频谱分析,观察信号的频谱波形。 系统函数的形式转换。 用Simulink平台对系统进行建模和动态仿真。 3.实验内容及结果 3.1以周期为T,脉冲宽度为2T1的周期性矩形脉冲为例研究Gibbs现象。 已知周期方波信号的相关参数为:x(t)=∑ak*exp(jkω),ω=2*π/T,a0=2*T1/T,ak=sin(kωT1)/kπ。画出x(t)的波形图(分别取m=1,3,7,19,79,T=4T1),观察Gibbs现象。 m=1; T1=4; T=4*T1;k=-m:m; w0=2*pi/T; a0=2*T1/T; ak=sin(k*w0*T1)./(k*pi); ak(m+1)=a0; t=0:0.1:40; x=ak*exp(j*k'*w0*t); plot(t,real(x)); 3.2求卷积并画图 (1)已知:x1(t)=u(t-1)-u(t-2), x2(t)=u(t-2)-u(t-3)求:y(t)=x1(t)*x2(t)并画出其波形。 t1=1:0.01:2; f1=ones(size(t1)); f1(1)=0; f1(101)=0; t2=2:0.01:3; f2=ones(size(t2)); f2(1)=0; f2(101)=0; c=conv(f1,f2)/100;
t3=3:0.01:5; subplot(311); plot(t1,f1);axis([0 6 0 2]); subplot(312); plot(t2,f2);axis([0 6 0 2]); subplot(313); plot(t3,c);axis([0 6 0 2]); (2)已知某离散系统的输入和冲击响应分别为:x[n]=[1,4,3,5,1,2,3,5], h[n]=[4,2,4,0,4,2].求系 统的零状态响应,并绘制系统的响应图。 x=[1 4 3 5 1 2 3 5]; nx=-4:3; h=[4 2 4 0 4 2]; nh=-3:2; y=conv(x,h); ny1=nx(1)+nh(1); ny2=nx(length(nx))+nh(length(nh)); ny=[ny1:ny2]; subplot(311); stem(nx,x); axis([-5 4 0 6]); ylabel('输入') subplot(312); stem(nh,h); axis([-4 3 0 5]); ylabel('冲击效应') subplot(313); stem(ny,y); axis([-9 7 0 70]); ylabel('输出'); xlabel('n'); 3.3 求频谱并画图 (1) 门函数脉冲信号x1(t)=u(t+0.5)-u(t-0.5) N=128;T=1; t=linspace(-T,T,N); x=(t>=-0.5)-(t>=0.5); dt=t(2)-t(1); f=1/dt; X=fft(x); F=X(1:N/2+1); f=f*(0:N/2)/N; plot(f,F)
、 北京理工大学珠海学院 课程设计任务书 2010 ~2011 学年第 2学期 学生姓名:林泽佳专业班级:08自动化1班指导教师:钟秋海工作部门:信息学院一、课程设计题目 : 《控制系统建模、分析、设计和仿真》 本课程设计共列出10个同等难度的设计题目,编号为:[0号题]、[1号题]、[2号题]、[3号题]、[4号题]、[5号题]、[6号题]、[7号题]、[8号题]、[9号题]。 学生必须选择与学号尾数相同的题目完成课程设计。例如,学号为8xxxxxxxxx2的学生必须选做[2号题]。 二、课程设计内容 (一)《控制系统建模、分析、设计和仿真》课题设计内容|
! " [2 有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 (二)《控制系统建模、分析、设计和仿真》课题设计要求及评分标准【共100分】 , 1、求被控对象传递函数G(s)的MATLAB描述。(2分) 2、求被控对象脉冲传递函数G(z)。(4分) 3、转换G(z)为零极点增益模型并按z-1形式排列。(2分) 4、确定误差脉冲传递函数Ge(z)形式,满足单位加速度信号输入时闭环稳态误差为零和实际 闭环系统稳定的要求。(6分) 5、确定闭环脉冲传递函数Gc(z)形式,满足控制器Dy(z)可实现、最少拍和实际闭环系统稳 定的要求。(8分)
6、根据4、5、列写方程组,求解Gc(z)和Ge(z)中的待定系数并最终求解Gc(z)和Ge(z) 。 (12分) 7、求针对单位加速度信号输入的最少拍有波纹控制器Dy(z)并说明Dy(z)的可实现性。 (3分) ! 8、用程序仿真方法分析加速度信号输入时闭环系统动态性能和稳态性能。(7分) 9、用图形仿真方法(Simulink)分析单位加速度信号输入时闭环系统动态性能和稳态性能。 (8分) 10、确定误差脉冲传递函数Ge(z)形式,满足单位速度信号输入时闭环稳态误差为零和实际 闭环系统稳定的要求。(6分) 11、确定闭环脉冲传递函数Gc(z)形式,满足控制器Dw(z)可实现、无波纹、最少拍和实际 闭环系统稳定的要求。(8分) 12、根据10、11、列写方程组,求解Gc(z)和Ge(z)中的待定系数并最终求解Gc(z)和Ge(z) 。 (12分) 13、求针对单位速度信号输入的最少拍无波纹控制器Dw(z)并说明Dw(z)的可实现性。(3分) 14、用程序仿真方法分析单位速度信号输入时闭环系统动态性能和稳态性能。(7分) 15、用图形仿真方法(Simulink)分析单位速度信号输入时闭环系统动态性能和稳态性能。 & (8分) 16、根据8、9、14、15、的分析,说明有波纹和无波纹的差别和物理意义。(4分) 三、进度安排 6月13至6月14:下达课程设计任务书;复习控制理论和计算机仿真知识,收集资料、熟悉仿真工具;确定设计方案和步骤。 6月14至6月16:编程练习,程序设计;仿真调试,图形仿真参数整定;总结整理设计、 仿真结果,撰写课程设计说明书。 6月16至6月17:完成程序仿真调试和图形仿真调试;完成课程设计说明书;课程设计答 辩总结。 [ 四、基本要求
Introduction Consider the proverb, “It takes a village to raise a child.” Similarly, multiple design team members participate in assuring PCB power integrity (PI) as a design moves from the early concept phase to becoming a mature product. On the front end, there’s the electrical design engineer who is responsible for the schematic. On the back end, the layout designer handles physical implemen-tation. Typically, a PI analysis expert is responsible for overall PCB PI and steps in early on to guide the contributions of others. How quickly a team can assure PCB PI relates to the effectiveness of that team. In this paper, we will take a look at currently popular analysis approaches to PCB PI. We will also introduce a team-based approach to PCB PI that yields advantages in resource utilization and analysis results. Common Power Integrity Analysis Methods There are two distinct facets of PCB PI – DC and AC. DC PI guarantees that adequate DC voltage is delivered to all active devices mounted on a PCB (often using IR drop analysis). This helps to assure that constraints are met for current density in planar metals and total current of vias and also that temperature constraints are met for metals and substrate materials. AC PI concerns the delivery of AC current to mounted devices to support their switching activity while meeting constraints for transient noise voltage levels within the power delivery network (PDN). The PDN noise margin (variation from nominal voltage) is a sum of both DC IR drop and AC noise. DC PI is governed by resistance of the metals and the current pulled from the PDN by each mounted device. Engineers have, for many years, applied resistive network models for approximate DC PI analysis. Now that computer speeds are faster and larger addressable memory is available, the industry is seeing much more application of layout-driven detailed numerical analysis techniques for DC PI. Approximation occurs less, accuracy is higher, and automation of How a Team-Based Approach to PCB Power Integrity Analysis Yields Better Results By Brad Brim, Sr. Staff Product Engineer, Cadence Design Systems Assuring power integrity of a PCB requires the contributions of multiple design team members. Traditionally, such an effort has involved a time-consuming process for a back-end-focused expert at the front end of a design. This paper examines a collaborative team-based approach that makes more efficient use of resources and provides more impact at critical points in the design process. Contents Introduction (1) Common Power Integrity Analysis Methods (1) Applying a Team-Based Approach to Power Integrity Analysis (3) Summary (6) For Further Information (7)
西安邮电大学 专业课程设计报告书 院系名称:电子工程学院学生姓名:李群学号05113096 专业名称:光信息科学与技术班级:光信1103 实习时间:2014年4月8日至2014年4月 18日
一、课程设计题目: 用matlab 仿真光束的传输特性。 二、任务和要求 1、用matlab 仿真光束通过光学元件的变换。 ① 设透镜材料为k9玻璃,对1064nm 波长的折射率为1.5062,镜片中心厚度为3mm ,凸面曲 率半径,设为100mm ,初始光线距离透镜平面20mm 。用matlab 仿真近轴光线(至少10条)经过平凸透镜的焦距,与理论焦距值进行对比,得出误差大小。 ② 已知透镜的结构参数为101=r ,0.11=n ,51=d ,5163.121==' n n (K9玻璃), 502-=r ,0.12=' n ,物点A 距第一面顶点的距离为100,由A 点计算三条沿光轴夹角分别为10、20、 30的光线的成像。试用Matlab 对以上三条光线光路和近轴光线光路进行仿真,并得出实际光线的球差大小。 ③ 设半径为1mm 的平面波经凸面曲率半径为25mm ,中心厚度3mm 的平凸透镜。用matlab 仿 真平面波在透镜几何焦平面上的聚焦光斑强度分布,计算光斑半径。并与理论光斑半径值进行对比,得出误差大小。(方法:采用波动理论,利用基尔霍夫—菲涅尔衍射积分公式。) 2、用MATLAB 仿真平行光束的衍射强度分布图样。(夫朗和费矩形孔衍射、夫朗和费圆孔衍射、夫朗和费单缝和多缝衍射。) 3、用MATLAB 仿真厄米—高斯光束在真空中的传输过程。(包括三维强度分布和平面的灰度图。) 4、(补充题)查找文献,掌握各类空心光束的表达式,采用费更斯-菲涅尔原理推导各类空心光束在真空中传输的光强表达式。用matlab 对不同传输距离处的光强进行仿真。 三、理论推导部分 第一大题 (1)十条近轴光线透过透镜时,理想情况下光线汇聚透镜的焦点上,焦点到像方主平面的距离为途径的焦距F ,但由于透镜的折射率和厚度会影响光在传输过程中所走的路径(即光程差Δ)。在用MATLAB 仿真以前先计算平行光线的传输路径。,R 为透镜凸面的曲率半径,h 为入射光线的高度,θ1为入射光线与出射面法线的夹角,θ2为出射光线与法线的夹角,n 为透镜材料的折射率。设透镜的中心厚度为d ,则入射光线经过透镜的实际厚度为:L=(R-d) 光线的入射角为:sinq1=h/R 折射角度满足:sinq2=nsinq1 而实际的光束偏折角度为:θ2-θ1。 由此可以看出,当平行光线照射透镜时,在凸面之前光线平行于光轴,在凸面之后发生了偏折,于光轴交汇一点,这一点成为焦点f ,折线的斜率为(-tan(θ2-θ1))。 (2)根据题意可得,本题所讨论的是与光轴夹角不同的三条光线,经过透镜的两次反射后的成像问题。利用转面公式计算。
作者简介:曹宇(1969-),男,上海人,硕士,工程师. 第6卷第 6期 2006年12月泰州职业技术学院学报 JournalofTaizhouPolytechnicalInstituteVol.6No.6 Dec.2006摘要:针对高速数字电路印刷电路板的板级信号完整性,分析了IBIS模型在板级信号完整 性分析中的作用。利用ADS仿真软件,采用电磁仿真建模和电路瞬态仿真测试了某个 实际电路版图,给出了实际分析结果。 关键词:信号完整性;IBIS;仿真;S参数 中图分类号:TP391.9文献标识码:A文章编号:1671-0142(2006)06-0030-03 信号完整性(SI,SignalIntegrity)的概念是针对高速数字信号提出来的。以往的数字产品,其时钟或数据频率在几十兆之内时,信号的上升时间大多在几个纳秒,甚至几十纳秒以上。数字化产品设计工程师关注最多的是“数字设计”保证逻辑正确。随着数字技术的飞速发展,原先只是在集成电路芯片设计中需要考虑的问题[1]在PCB板级设计中正在逐步显现出来,并由此提出了信号完整性的概念。 在众多的讲述信号完整性的论文和专著中[2,3],对信号完整性的描述都是从信号传输过程中可能出现的问题(比如串扰,阻抗匹配,电磁兼容,抖动等)本身来讨论信号完整性,对信号完整性没有一个统一的定义。事实上,信号完整性是指信号在通过一定距离的传输路径后在特定接收端口相对指定发送端口信号的还原程度,这个还原程度是指在指定的收发参考端口,发送芯片输出处及接收芯片输入处的波形需满足系统设计的要求[4]。 1、板级信号完整性分析 1.1信号完整性分析内容的确定 信号完整性分析工作是一项产品开发全流程工作,从产品设计阶段开始一直延续到产品定型。PCB板级设计同样如此。在系统设计阶段,产品还没有进入试制,需要建立相应的系统模型并得到仿真结果以验证设计思想和设计体系正确与否,这个阶段称前仿真;前仿真通过后,产品投入试制,样品出来后再进行相应的测试和仿真,这个阶段称后仿真。假如将每一块PCB板视为一个系统,影响这个系统正常工作的信号问题涉及到所有的硬件和软件,包括芯片、封装、PCB物理结构、电源及电源传输网络和协议。 对系统所有部分都进行仿真验证是不现实的。应根据系统设计的要求选定部分内容进行测试仿真。本文所提及的“板级信号完整性分析”仅针对芯片引脚和走线的互连状态分析。 当被传输的信号脉冲时间参量(如上升时间、传输时间等)已缩短至和互连线上电磁波传输时间处于同一个量级时,信号在互连线上呈现波动效应,应采用微波传输线或分布电路的模型来对待互连线,从而产生了时延、畸变、回波、相邻线之间的干扰噪声等所谓的“互连效应”[1]。 假设PCB板上芯片引脚的输入输出信号都是“干净”的,那么只要考虑互连线路本身的互连效应。事实上,每个芯片引脚在封装时都有其独特的线路特性,这些特性是由其内部的晶体管特性决定的,同样的信号在不同引脚上的传输效率差异很大。因此,在分析信号传输的互连效应时必须考虑芯片内部的电路特性以提取相对准确的电路模型,并在此基础上作进一步的分析。这个模型就是在业界被广泛使用的IBIS模型。 1.2IBIS标准模型的建立 PCB板级信号完整性的仿真及应用 曹宇,丁志刚,宗宇伟 (上海计算机软件技术开发中心,上海201112)
交通仿真实验报告 篇一:交通仿真实验报告 目录 1 上机性质与目的.................................. 2 2 上机内容....................................... 2 3 交叉口几何条件、信号配时和交通流数据描述.......... 3 3.1 交叉口几何数据................................ 3 3.2 交叉口信号配时系统............................ 3 3.3 交叉口交通流数据.............................. 4 4 交叉口交通仿真.................................. 4 4.1 交通仿真步骤.................................. 4 4.2 二维输出..................................... 13 4.3 3D输出...................................... 14 5 仿真结果分析................................... 15 6 实验总结和体会 (15) 实验上机名称:信号交叉口仿真 1 上机性质与目的 本实验属于计算机仿真实验,借助仿真系统模拟平面信号交叉口场景,学生将完成从道路条件设计到信号相位配置等一系列仿真实验。 实验目的: 1. 了解平面信号交叉口在城市交通中的地位; 2. 了解平面信号交叉口的主要形式、规模等基本情况; 3. 了解交叉口信号相位配时及对交叉口通行能力的影响;
课程设计 双闭环直流调速系统设计及仿真验证 学院年级:工程学院08级 组长:陈春明学号200830460102 08自动化1班成员一:陈木生学号 200830460103 08自动化1班 指导老师: 日期: 2012-2-28 华南农业大学工程学院
摘要 转速、电流双闭环调速系统是应用最广的直流调速系统,由于其静态性能良好,动态响应快,抗干扰能力强,因而在工程设计中被广泛地采用。现在直流调速理论发展得比较成熟,但要真正设计好一个双闭环调速系统并应用于工程设计却有一定的难度。 Matlab是一高性能的技术计算语言,具有强大的科学数据可视化能力,其中Simulink具有模块组态简单、性能分析直观的优点,方便了系统的动态模型分析。应用Simulink来研究双闭环调速系统,可以清楚地观察每个时刻的响应曲线,所以可以通过调整系统的参数来得出较为满意的波形,即良好的性能指标,这给分析双闭环调速系统的动态模型带来很大的方便。 本研究采用工程设计方法,并利用Matlab协助分析双闭环调速系统,依据自动控制系统快、准、稳的设计要求,重点分析系统的起动过程。 关键词:双闭环直流调速 Simulink 自动控制
目录 1、直流电机双闭环调速系统的结构分析....................... 1.1 双闭环调速系统的组成............................... 1.2 双闭环调速系统的结构.................................... 2 、建立直流电机双闭环调速系统的模型............................ 2.1 小型直流调速系统的指标及参数......................... 2.2 电流环设计............................................... 2.3 转速环设计................................................ 3、直流电动机双闭环调速系统的MATLAB仿真.................... 3.1 系统框图的搭建............................................. 3.2 PI控制器参数的设置...................................... 3.3 仿真结果.................................................... 4、结论与总结....................................................... 5、参考资料.......................................................
MATLAB通信系统仿真实验报告
实验一、MATLAB的基本使用与数学运算 目的:学习MATLAB的基本操作,实现简单的数学运算程序。 内容: 1-1要求在闭区间[0,2π]上产生具有10个等间距采样点的一维数组。试用两种不同的指令实现。 运行代码:x=[0:2*pi/9:2*pi] 运行结果: 1-2用M文件建立大矩阵x x=[0.10.20.30.40.50.60.70.80.9 1.11.21.31.41.51.61.71.81.9 2.12.22.32.42.52.62.72.82.9 3.13.23.33.43.53.63.73.83.9] 代码:x=[0.10.20.30.40.50.60.70.80.9 1.11.21.31.41.51.61.71.81.9 2.12.22.32.42.52.62.72.82.9 3.13.23.33.43.53.63.73.83.9] m_mat 运行结果: 1-3已知A=[5,6;7,8],B=[9,10;11,12],试用MATLAB分别计算 A+B,A*B,A.*B,A^3,A.^3,A/B,A\B. 代码:A=[56;78]B=[910;1112]x1=A+B X2=A-B X3=A*B X4=A.*B X5=A^3 X6=A.^3X7=A/B X8=A\B
运行结果: 1-4任意建立矩阵A,然后找出在[10,20]区间的元素位置。 程序代码及运行结果: 代码:A=[1252221417;111024030;552315865]c=A>=10&A<=20运行结果: 1-5总结:实验过程中,因为对软件太过生疏遇到了些许困难,不过最后通过查书与同学交流都解决了。例如第二题中,将文件保存在了D盘,而导致频频出错,最后发现必须保存在MATLAB文件之下才可以。第四题中,逻辑语言运用到了ij,也出现问题,虽然自己纠正了问题,却也不明白错在哪了,在老师的讲解下知道位置定位上不能用ij而应该用具体的整数。总之第一节实验收获颇多。
北华大学 《MATLAB仿真》课程设计 姓名: 班级学号: 实习日期: 辅导教师:
前言 科学技术的发展使的各种系统的建模与仿真变得日益复杂起来。如何快速有效的构建系统并进行系统仿真,已经成为各领域学者急需解决的核心问题。特别是近几十年来随着计算机技术的迅猛发展,数字仿真技术在各个领域都得到了广泛的应用与发展。而MATLAB作为当前国际控制界最流行的面向工程和科学计算的高级语言,能够设计出功能强大、界面优美、稳定可靠的高质量程序,而且编程效率和计算效率极高。MATLAB环境下的Simulink是当前众多仿真软件中功能最强大、最优秀、最容易使用的一个系统建模、仿真和分析的动态仿真环境集成工具箱,并且在各个领域都得到了广泛的应用。 本次课程设计主要是对磁盘驱动读取系统校正部分的设计,运用自动控制理论中的分析方法,利用MATLAB对未校正的系统进行时域和频域的分析,分析各项指标是否符合设计目标,若有不符合的,根据自动控制理论中的校正方法,对系统进行校正,直到校正后系统满足设计目标为止。我组课程设计题目磁盘驱动读取系统的开环传递函数为是设计一个校正装置,使校正后系统的动态过程超调量δ%≤7%,调节时间ts≤1s。 电锅炉的温度控制系统由于存在非线性、滞后性以及时变性等特点,常规的PID控制器很难达到较好的控制效果。考虑到模糊控制能对复杂的非线性、时变系统进行很好的控制, 但无法消除静态误差的特点, 本设计将模糊控制和常规的PI D控制相结合, 提出一种模糊自适应PID控制器的新方法。并对电锅炉温度控制系统进行了抗扰动的仿真试验, 结果表明, 和常规的PI D控制器及模糊PI D复合控制器相比,模糊自适应PI D控制改善了系统的动态性能和鲁棒性, 达到了较好的控制效果。
本人技术屌丝一枚,从事PCB相关工作已达8年有余,现供职于世界闻名的首屈一指的芯片设计公司,从苦逼的板厂制板实习,到初入Pcblayout,再到各种仿真的实战,再到今天的销售工作,一步一步一路兢兢业业诚诚恳恳,有一些相关领悟和大家分享。买卖不成也可交流。 1.谈起硬件工作,是原理图,pcb,码农的结合体,如果你开始了苦逼的pcblayout工作,那么将是漫长的迷茫之路,日复一日年复一年,永远搞不完的布局,拉线。眼冒金星不是梦。最多你可以懂得各种模块的不同处理方式,各种高速信号的设计,但永远只能按照别人的意见进行,毫无乐趣。 2.谈起EDA相关软件,形象的说,就普通的PROTEL/AD来说你可能只有3-6K,对于pads 可能你有5-8K,对于ALLEGRO你可能6-10K,你会哀叹做的东西一样,却同工不同酬,没办法这就是市场,我们来不得无意义的抱怨。 3.众所周知,一个PCB从业者最好的后路就是仿真工作,为什么呢?一;你可以懂得各种模块的设计原则,可以优化不准确的部分,可以改善SI/PI可以做很多,这往往是至关重要的,你可以最大化节约成本,减少器件却功效相同;二;从一个pcblayout到仿真算是水到渠成,让路走的更远; 三:现实的说薪资可以到达11-15K or more,却更轻松,更有价值,发言权,你不愿意吗? 现在由于本人已技术转销售,现在就是生意人了哈哈,我也查询过各种仿真资料我发现很少,最多不过是Mentor Graphics 的HyperLynx ,candense的si工具,
但是他们真的太low了,精确度和完整性根本不能保证,最多是定性的能力,无法定量。真正的仿真是完整的die到die的仿真,是完整的系统的,是需要更高级的仿真软件,被收购的xxsigrity,xx ansys,hspicexx,adxx等等,这些软件才是真正的仿真。 本人提供各种软件及实战代码,例子,从基本入门到高级仿真,从电源仿真,到ddr仿真到高速串行仿真,应有尽有,,完全可以使用,想想以后的高薪,这点投入算什么呢?舍不得孩子套不住狼哦。 所有软件全兼容32位和64位系统。 切记本人还提供学习手册,你懂的,完全快速进入仿真领域。你懂的! 希望各位好好斟酌,自己的路是哪个方向,是否想更好的发展,舍得是哲学范畴,投资看得是利润的最大化,学会投资吧,因为他值得拥有,骚年! 注:本人也可提供培训服务,面面俱到,形象具体,包会! 有购买和学习培训兴趣的请联系 QQ:2941392162
大连理工大学 本科实验报告 课程名称:信号与系统实验 学院(系):电子信息与电气工程学部专业: 通信工程 班级: 1401班 学号:201483091 学生姓名:李睿 2016年 5 月21日 ?实验项目列表
?大连理工大学实验预习报告 学院(系):电信专业:通信工程班级:1401班 姓名:李睿学号:201483091组:5 ___ 实验时间:2016、5、6 实验室:创新园大厦c0221 实验台: 5 指导教师签字:成绩: 信号得频谱图 一、实验目得与要求 1、掌握周期信号得傅里叶级数展开 2、掌握周期信号得有限项傅里叶级数逼近 3、掌握周期信号得频谱分析 4、掌握连续非周期信号得傅立叶变换 5、掌握傅立叶变换得性质 二、实验用得matlab命令与例子
1、a:b:c:产生一个从a到 c,间隔为b得等间隔数列例:5:1:11,产生一个从 5 到11,间隔为 1 得等间隔数列 2、quare(t,duty):周期性矩形脉冲信号(duty 表示占空比)调用形式: y=square(t,duty)例:产生一个周期为2π,幅值为±1得周期性方波。y=square(2*pi*30*t,75); plot(t,y),grid on axis([—0、1,0、1,—1、5,1、5]) 3、plot():matlab 中二维线画图函数plot(x,y,’颜色与标识’):若 y 与x为同维向量,则以x为横坐标,y 为纵坐标绘制连线图. 若x 就是向量,y 就是行数或列数与x长度相等得矩阵,则绘制多条不同色彩得连线图,x 被作为这些曲线得共同横坐标.若 x 与 y 为同型矩阵,则以x,y对应元素分别绘制曲线,曲线条数等于矩阵列数. 例:在0≤x≤2π区间内,绘制曲线 y=2e-0、5xcos(4πx)。 x=0:2*pi; y=2*exp(-0、5*x)、*cos(4*pi*x); plot(x,y) ‘’:y 黄m紫 c 青 r 红 g 绿 b 蓝w白 k 黑—实线、点 <小于号 :点线o圆s 正方形 -、点划线x 叉号 d 菱形- -虚线 +加号h 六角星 *星号 p 五角星 v 向下三角形 ^向上三角形〉大于号 4、grid on:有网格 grid off:关掉格网下面就是加上命令grid on后画得图,有网格. 5、 axis([a b c d]):表明图线得x轴范围为a~by轴范围为c~d例:plot(x,y)axis([0 1 23]) grid on 6、 length(a):表示矩阵a得最大得长度比如length([1 2 3;4 5 6]) 等于3,因为2行与3列中最大就是3。当a就是向量时,即表示向量得元素个数,因为向量总就是1×n或n×1得,而n一定大于或等于1、所以得到得结果一定就是n. 7、 1、/tan(pi、*x):表示点乘。点乘就是值对值得运算上面得式子中 X 可能就是一个向量或矩阵,PI后面得点就是一个PI 与一个向量相乘,得到得也就是一个向量;1 后面乘得自然也就是个向量所以要加点,也就就是对应不同得X,有不同得 Y 值. 8.figure就是建立图形得意思. 系统自动从 1,2,3,4、、、来建立图形,数字代表第几幅图形,figure(1),figure(2)就就是第一第二副图得意思,在建立图形
仿真课程设计报告 题目: 柔性生产线仿真案例 班级:物流 姓名: 学号: 指导教师: 2015年9月23日
目录 一、课程设计目的 (3) 二、课程设计内容 (3) 三、设计步骤 (3) 3.1案例分析 (3) 3.1.1案例说明 (3) 3.1.2建模步骤 (5) 3.1.3主要技术设计 (5) 3.2模型搭建 (6) 3.2.1基础空间总体布局 (6) 3.2.2Track设计 (6) 3.2.3加工设备的设计 (7) 3.2.4工件和AGV的属性设计 (9) 3.2.5表的设计 (10) 3.2.6工件生成器和消灭器的设计 (12) 3.2.7Method和Variable的设计 (12) 3.3仿真实现 (13) 3.3.1工件加工流程及时间设计 (13) 3.3.2任务队列设计 (13) 3.3.3小车的运行规则设计 (14) 3.3.4其它控制方法 (17) 四、仿真分析 (20) 4.1设备利用率 (20) 4.2轨道利用率 (21) 4.3加工总时间 (22) 五、模型优化 (22) 5.1订单投产优化 (22) 5.2小车优化 (23) 5.3其它优化 (26) 六、课设总结 (29)
一、课程设计目的 本课程设计是与物流工程专业教学配套的实践环节之一,结合《现代生产管理》、《设施布置与规划》、《离散系统建模与仿真》等课程的具体教学知识点开展。在完成以上课堂教学的基础上,进行一次全面的实操性锻炼。设计采用企业的实际案例数据,要求完成生产线物流仿真建模和生产线物流优化方案设计两大方面的实际设计内容。 通过本环节的设计锻炼,我们可以加深对本课程理论与方法的掌握,同时具备分析和解决生产运作系统问题的能力,改变传统的理论教学与生产实际脱节的现象。 二、课程设计内容 以某企业柔性制造系统(FMS)为对象,按该企业的生产实际资料为设计依据。对该柔性制造系统进行建模和仿真,通过模拟该制造系统的物流状况,寻找优化的物流方案进行产能平衡,并针对优化后的方案再次进行仿真,对比两个仿真结果在交货期要求,设备利用率等方面的不同,并制定该柔性制造系统生产作业计划。 三、设计步骤 3.1案例分析 3.1.1案例说明 1.柔性制造系统状况: 某企业柔性制造系统共有5台加工中心,定义加工中心名称分别为CNC_1、CNC_2、CNC_3、CNC_4、CNC_5。该制造系统内有一辆AGV小车,运行速度为1米/秒,可控制其实现不同的运送策略。每台设备入口和出口前有容量为4的缓冲,工件在由设备完成加工前后必须经过入口缓冲和出口缓冲,每台设备由一工人负
信号完整性分析SI仿真Demo Altium Designer的SI仿真功能,可以在原理图阶段假定PCB环境进行布线前预仿真,帮助用户进行设计空间探索,也可以在PCB布线后按照实际设计环境进行仿真验证,并辅以虚拟端接,参数扫描等功能,帮助用户考察和优化设计,增强设计信心。 1.在Windows下打开SI_demo子目录,双击打开演示案例项目 SI_demo.prjpcb,当前项目树中只有一页原理图SI_demo.schdoc,双击 SI_demo.schdoc打开原理图。观察到图中有U2和U3两个IC器件。 2.为器件指定IBIS模型(如果元件库中该器件已有正确的IBIS模型,则可跳 过步骤2) 通过双击器件U2,弹出以下窗口:
点击Add右边的下拉箭头,选择Signal Integrity,为器件U2指定SI仿真用的IBIS模型。 在弹出的SI模型选择窗口中点击 Import IBIS,选择U2对应的IBIS模 型文件导入,本例中U2的IBIS模型 文件为SI_demo文件夹中的文件 5107_lmi.ibs,后面各窗口一直点击 OK,直到回到原理图界面,U2的模 型设定完成。 双击器件U3,按照同样的步骤为U3 指定IBIS模型,其对应的IBIS模型 文件为:edd2516akta01.ibs
3.为关注的网络设定规则 通过点击主菜单下的Place->Directives->Blanket,放置一个方框,将所关注的网络名称框住(本例中已经框住了LMID00-LMID15共16位数据总线)。 然后同样通过Place->Directives->PCB Layout, 放置一个PCB Rule规则符号,置于方框的边界上。