Application Note:
HFAN-2.5.0
Rev 0; 05/04
Single-Ended vs. Differential Methods of Driving a Laser Diode
MAXIM High-Frequency/Fiber Communications Group
Maxim Integrated Products
3hfan250.doc 05/25/2004
Single-Ended vs. Differential Methods of Driving a Laser Diode
1 Introduction
A proper interface circuit to connect a driver to a laser diode is essential for an optimized optical transmitter design. In general, the single-ended drive of laser diodes provides a straight forward solution that requires less components and board space. Drawbacks include a comparatively slow output edge-speed and noise added to the transceiver power supply, which will eventually affect the receiver sensitivity. Recent industrial practice has shown that optical transmitters based on differential drives are able to overcome the disadvantages associated with a single-ended drive. The purpose of this application note is to reveal how a differential drive provides a faster edge-speed than a single-ended drive.
Laser Driver CP2
OUTCP1 OUT+ RD VCC
BIAS RF CF
Figure 1. Single-ended Method of Driving a Laser Diode
VCC
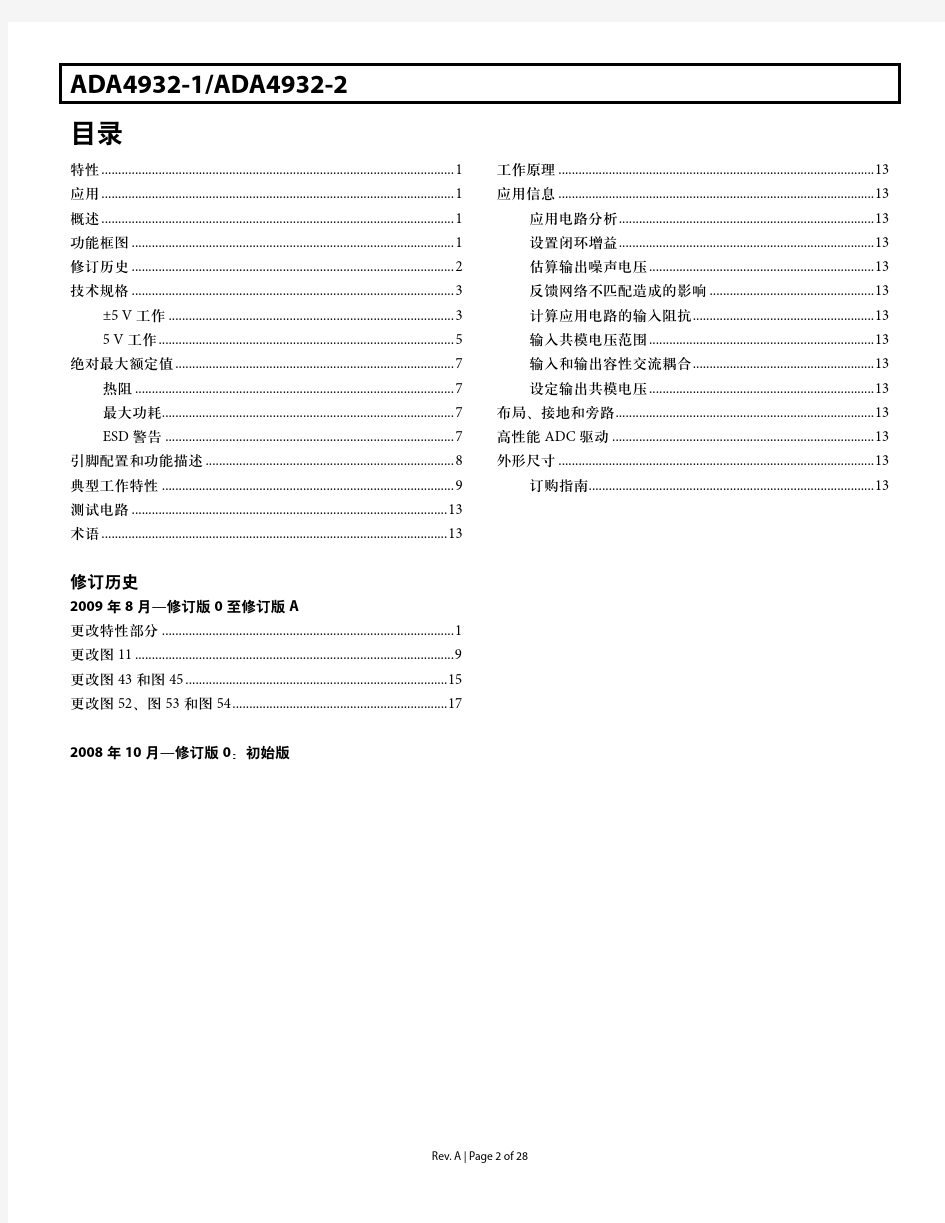
2 Circuit Configuration for Single-Ended Drive and Differential Drive
For a single-ended drive, the laser modulation current is applied either to the laser anode (commoncathode laser) or to the laser cathode (commonanode laser). Figure 1 is a simplified schematic for driving a common-anode laser. The modulation current is delivered to the laser cathode through a damping resistor (RD). The laser anode is directly connected to the power supply, and the laser bias is provided from a driver bias output isolated by a ferrite bead. For a balanced DC and AC loading, the driver complementary output is pulled up to Vcc by a parallel network consisting of a ferrite bead and a resistor that matches the equivalence of the laser load and the damping resistor. The RC shunt network (RF and CF) provides high-frequency damping. Capacitance CP (CP1 and CP2) at the driver outputs represents a combination of output transistor equivalent capacitance, packaging and board layout parasitic capacitances.
Laser Driver CP2
OUTCP1 OUT+ RD
BIAS
Figure 2. Differential Method of Driving a Laser Diode Figure 2 shows one example of a differential drive. The laser cathode is AC-coupled to the driver output via a damping resistor (RD). The driver output is pulled up to Vcc through a ferrite bead to provide a DC bias to the output transistor. The shared node of the driver complementary output and the laser diode anode is connected to Vcc through a ferrite bead which provides high-frequency isolation from Vcc. The laser bias is provided in a similar way as in a single-ended drive configuration. Using the same laser diode and driver, a 2.5Gbps optical transmitter based on differential drive shows more than 20ps improvement in edge-speed than a single-ended drive [1].
Maxim Integrated Products Page 2 of 4
Application Note HFAN-02.5.0 (Rev. 0, 05/04)
【电路精选】单端至差分驱动器电路分析 模数转换器即A/D 转换器,或简称ADC,通常是指一个将模拟信号 转变为数字信号的电子元件。通常的模数转换器是将一个输入电压信号转换为 一个输出的数字信号。本文主要给大家介绍单端至差分驱动器电路分析。 由于数字信号本身不具有实际意义,仅仅表示一个相对大小。故任何一 个模数转换器都需要一个参考模拟量作为转换的标准,比较常见的参考标准为 最大的可转换信号大小。而输出的数字量则表示输入信号相对于参考信号的大小。 LTC2387-18 转换器电路LTC2387-18 是一款具有差分输入的15Msps、高度线性、低噪声SAR 转换器。该ADC 兼具卓越的线性和宽动态范围,因而成为了高速成像和仪表应用的理想选择。无延迟操作提供了一种面向高速控 制环路应用的独特解决方案。高输入频率下的非常低失真可实现需要宽动态范 围和大信号带宽的通信应用。 在大多数场合中,通过采用一个差分输入、差分输出放大器驱动ADC 输入来优化性能。在仅可提供一个单端信号的场合中,需要采用高性能运放以 把一个单端信号转换为一个适用于LTC2387-18 的差分信号。 在上面的电路中,使用了两个运放,一个用于同相通路,另一个用于反 相通路。同相运放是一个电压跟随器,它的前面是一个RC 低通滤波器。该滤波器可阻止非常高频率信号到达LT6201,它能够在几十MHz 的频率下运作。反相运放由一个相同的网络驱动。为了使信号反相,R5 和R7 设定为590Ω。这些电阻值反映了运放输出电流、输入失调电流和噪声产生量 之间的折衷。选定的电阻值加上4V 峰至峰输出电压摆幅导致从运放输出吸收
MT-076TUTORIAL Differential Driver Analysis Differential drivers can be driven by either single-ended or differential signals. This tutorial analyzes both conditions using either an unterminated or a terminated source. CASE 1: DIFFERENTIAL INPUT, UNTERMINATED SOURCE Figure 1 shows a differential driver driven from a balanced unterminated source. This would typically be the condition for a low impedance source where the connection distance between the source and the driver is minimal. R OUT R G1= R G2R F1= R F2V OUT+ V OUT–2/R R R V V V V V G S 1G 1F SIG OUT OUT IN OUT += ?==?+ Figure 1: Differential Input, Unterminated Source The design inputs are the source impedance R S , the gain setting resistor R G1, and the desired gain G. Note that the gain is measured with respect to the signal voltage source, V SIG . The total value of the gain setting resistor with respect to the signal source, V SIG , is R G1 + R S /2. Also, R G2 = R G1. The required value of the feedback resistors, R F1 = R F2, is then calculated using: ?? ???? +==2R R G R R S 1G 2F 1F Eq. 1
步进电机驱动器的工作原理 步进电机在控制系统中具有广泛的应用。它可以把脉冲信号转换成角位移,并且可用作电磁制动轮、电磁差分器、或角位移发生器等。 有时从一些旧设备上拆下的步进电机(这种电机一般没有损坏)要改作它用,一般需自己设计驱动器。本文介绍的就是为从一日本产旧式打印机上拆下的步进电机而设计的驱动器。本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬件设计。 1. 步进电机的工作原理 该步进电机为一四相步进电机,采用单极性直流电源供电。只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。图1是该四相反应式步进电机工作原理示意图。 图1 四相步进电机步进示意图
开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产 生错齿。 当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极 产生错齿。依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向 转动。 四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。单四拍与双四拍的步距角相等,但单四拍的转动力矩小。八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。 单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示: 图2.步进电机工作时序波形图 2.基于AT89C2051的步进电机驱动器系统电路原理 图3 步进电机驱动器系统电路原理图
关于运动控制卡与驱动器差分/单端接线的相关说明 作者:雷赛智能控制股份有限公司侯光辉 目前雷赛运动控制卡采用脉冲信号加方向信号的输出模式,与驱动器的电路接线有两种接线方式:差分驱动接线和单端驱动接线。想要做到运动控制卡正常发脉冲并驱动驱动器和电机正常运行,其接线方式和运动控制卡上的相应跳线设置必须一致,这样才能正常使用控制卡,驱动器和电机。目前我公司的运动控制卡在其正面提供了单端和差分跳线选择,用于设置差分和单端驱动方式,出厂默认设置是差分驱动方式。 如下:图1-1(以DMC2410四轴卡为例),红色框所圈部分就是控制卡 跳线设置开关: 图1-1 DMC2410四轴运动卡外观图
如下:图1-2和图1-3是DMC2410四轴运动控制卡的差分/单端跳线详细配置图: 图1-2 差分输出方式的跳线设置图1-3 单端输出方式的跳线设置 图1-2是DMC2410控制卡差分输出方式的跳线设置,我司控制卡出厂默认设置值是差分输出设置的,即每个轴所对应的两个跳线开关的第1路针角和第2路针角短接,对应关系为控制卡的第一个轴对应J1和J2,即一个脉冲信号和一个方向信号,后面的轴与JX的关系依此类推。图1-3是DMC2410控制卡单端输出方式的跳线设置,即每个轴所对应的两个跳线开关的第2路针角与第3路针角短接。 下图是控制卡差分输出方式和单端输出方式的接口电路图:
图1-4 差分方式设置及接口电路图 图1-5 单端方式设置及接口电路图 从以上的接口电路图(图1-4和图1-5 )中可以看出,当运动控制卡设置成差分输出时,相当于两对差分信号,控制卡上面的PUL+,PUL-,DIR+,DIR-四个输出口与驱动器上面的PUL+,PUL-,DIR+,DIR-四个输入接口都要连接;当运动控制卡被设置成单端输出时,只要控制卡上面PUL-,DIR-两个输出口与驱动器上面的PUL和DIR两个输入口连接就可以了,此种方式控制卡上的PUL+和DIR+变成+5V 电压,直接可以给驱动器的共阳端提供+5V电压。见图1-5 单端输出设置及接口电路图。
公司简介 上海固若金电子科技有限公司是一家从事步进电机驱动器开发、生产、销售为一体的高科技企业,并且 多年从事电机控制系统的开发,致力于机电一体化产品的开发和运动控制系统的优化集成。 公司现主要产品为步进电机驱动器,功能强大,性能可靠,性价比极高。并且可为客户量身定做各种控 制系统。产品广泛应用于数控机床、电脑绣花、包装机械、雕刻机、绕线机、 XYZ 三维工作台、医疗设备 等行业中。 公司拥有一批积累了丰富经验的开发、生产、销售和工程服务人员。可为用户开发多种层次自动化控制 系统,包括产品选型、方案设计。公司坚持 " 质量第一,用户至上 " 的原则,服务于用户,让用户满意, 为用户提供优质产品和服务。 步进电机选型指南 步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它 就驱动步进电机按设定的方向转动一个固定的角度(步进角)。您可以通过控制脉冲个数来控制角位移量, 从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速 的目的。 一、 步进电机的种类: 永磁式(PM) :磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度 或15度;多用于空调风摆上。 反应式(VR):国内一般叫BF,常见的有三相反应式,步距角为1.5度;也有五相反应式。噪音大,无 定为转距已大量淘汰。 混合式(HB):常见的有两相混合式,五相混合式,三相混合式,四相混合式,两相跟四相可以通用驱 动器,五相跟三相必须使用各自的驱动器; 两相、四相混合式步距角多是1.8度,具有小体积,大力距,低噪音; 五相混合式步进电机一般为0.72度,电机步距角小,分辨率高,但是驱动电路复杂,接线麻烦,如5相十线制。 三相混合式步进电机步距角为1.2度 1、步进电机的保持转距:指步进电机通电但没有转动时,定子锁住转子的力矩。它是步进电机最重要 的参数之一,通常步进电机在低速时的力矩接近保持转矩。由于步进电机的输出力矩随速度的增大而不断 衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。比如, 当人们说1N.m的步进电机,在没有特殊说明的情况下是指保持转矩为1N.m的步进电机。 2、步进电机的精度:步进电机的精度为步进角的3-5%,且不累积。 3、空载启动频率:即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机 不能正常启动,可能发生丢步或堵转。在有负载的情况下,启动频率应更低。如果要使电机达到高速转动, 脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到 高速)。 4、步距角:驱动器接收一个脉冲,电机对应转动的角度。 5、定位转距:指步进电机不通电的情况下,定子锁住转子的力矩。 6、运行频率:步进电机在不失步状态下运行最高频率。
2HB3525D细分驱动器 ■ 2H2HB3525D细分驱动器器 2HB3525是等角度恒力矩细分型高性能步进驱动器,驱动电压DC12-36V,采用单电源供电。适配电流在2.0A以下,外径57mm以下各种型号的两相混合 式步进电机。 ?设有4档等角度恒力矩细分 ?双极恒流驱动 ?光电隔离信号输入/输出 ?驱动电流最大2.0A/PH连续可调, ?单电源输入,电压范围:DC12-36V ?体积小(96x56.5x21mm2) ;净重0.1kg 驱动器接线示意图 采用侧面安装,散热效果较好
▲注意: ●不要将电源接反,输入电压不要超过DC36V。 ●输入控制信号电平为5V,当高于5V时需要接限流电阻。 ●此款驱动器支持“差分”“共阳”“共阴”三种接法,请根据实际情况正确选择。 ●驱动器通电时绿色指示灯POWER亮。 https://www.doczj.com/doc/888767517.html,
2HB404D细分驱动器 特点Array?高性能、低价格 ?设有15档等角度恒力矩细分,最高分辨率12800步/转,使运转 平滑,分辨率提高 ?采用独特的控制电路,有效的降低了噪音,增加了转动平稳性 ?最高反应频率可达20Kpps ?步进脉冲停止超过100ms时,线圈电流自动减半,减小了许多 场合的电机过热 ?双极恒流斩波方式,使得相同的电机可以输出更大的速度和功率 ?光电隔离信号输入/输出 ?驱动电流从0.6A/相到4A/相分16档可调 ?可以驱动任何4.0A相电流以下二相混合式步进电机 ?单电源输入,电压范围:DC18-40V 典型应用 医疗器械、机器人、仪器仪表、雕刻机、激光打标机,激光内雕机 简述 2HB404D为一款等角度恒力矩细分型驱动器,驱动电压直流18V~40V,适配电流在4.0A 以下、外径42,57,86mm的各种型号的二相混合式步进电机。该驱动器内部采用类似伺服控制原理的电路,此电路可以使电机低速运行平稳,几乎没有震动和噪音,电机在高速时力矩大,定位精度最高可达12800步/转。 电器规格 电流设定 1. STOP/Im为保持状态输出电流设置电位器,可设置为正常输出电流的20%~80% (顺时针增大,逆时针减小)
?主要特点 ?M415B 产品特性 * 供电电压40VDC * 驱动电流0.21-1.5A * 细分精度1-64细分可选,动态可改细分(需定制) * 光隔离信号输入 * 电机噪声优化功能 * 可驱动任何1.5A相电流以下两相、四相混合式步进电机 * 20KHz斩波频率 产品概述 M415B是采用专利技术研发的细分型高性能步进电机驱动器,适合驱动任何中小型1.5A相电流以下两相或四相混合式步进电机。由于采用新型的双极性恒流斩波驱动技术,使用同样的电机时可以比其它驱动方式输出更大的速度和功率。M415B的细分功能使步进电机运转精度提高1-64倍。 每秒两万次的斩波频率,可以消除驱动器中的斩波噪声。另一特有的功能是静止自动减流:当电机处于停止状态时,输出电流可自动降至较低值, 从而减少电机和驱动器的发热。 为满足用户在脉冲频率不高的情况下实现低速高细分、高速时用低细分的需求,上位机先检测驱动器输出的整步信号FSTEP,如整步信号有效,则上位机输出新的细分数(MS2、MS1、MS0),待下一个整步出现后,驱动器就以新的细分数工作。动态改细分时,细分选择开关SW4、SW5、SW6必须置于OFF状态。上位机初始化后,应在输出脉冲前,设置细分数(MS2、MS1、MS0)。如MS2、MS1、MS0为全OFF状态,则驱动器不工作,直到MS2、MS1、MS0脱离全OFF状态。 主要应用领域 适合各种小型自动化设备和仪器,例如:气动打标机、贴标机、割字机、激光打标机、绘图仪、小型雕刻机、数控机床、拿放装置等。在用户期望低振动、小噪声、高精度、高速度的小型设备中效果特佳。 电气规格
工作电流设定 微步细分设定 接口信号描述 典型接线图
如何选择差分ADC驱动器并设计驱动电路 ?Q:用AD9631设计电流转电压,后端加一个变压器,为什么信号会失真并且发热,是自激吗,怎么解决? ?A:应该是由自激的因素引起,由于变压器的输入也会呈现一定的阻容特性,可尝试在输出串联一个小电阻,看是否改善。 ?Q:在AD和运算放大器连接中,零点漂移如何抑制 ?A:零点漂移是指当放大电路输入信号为零时,由于受温度变化,电源电压不稳等因素的影响,使静态工作点发生变化,并被逐级放大和传输,导致电路输出端电压偏离原固定值而上下漂动的现象.在实际电路中常采用补偿和调制两种手段。补偿是指用另外一个元器件的漂移来抵消放大电路的漂移,如果参数配合得当,就能把漂移抑制在较低的限度之内。 ?Q:能推荐一套电桥信号调理的方案,谢谢。需要带有输入端调零功能。 ?A:可以更具体的提出你的需求吗?ADI有这方面的参考方案,最好你发邮件到china.support@https://www.doczj.com/doc/888767517.html,索取资料. ?Q:如何设计稳定合适的驱动电路 ?A:这个问题有点大,驱动电路是否合适,要和后端的采样电路匹配才合适!需要从系统级考虑问题 ?Q:MCU应用ADC时误差如何减小,怎样校准 ?A:这个需要查看误差是从哪里来的,从而来减小噪声源,进行软件或硬件的校准,如布线,软件校准,器件选择等等 ?Q:有can和485工业总线的解决方案吗?同样关心! ?A:ADI CAN总线的解决方案目前都是隔离的,如ADM3053,ADM3052等。其中,ADM3053还提供隔离电源,方便用户使用。RS-485的产品有很多,有隔离和非隔离型的。ADM2582/7E是一款隔离电压2.5KVrms,带隔离电源的rs-485收发器。 ?Q:喜欢软件滤波,硬件滤波应该没有软件滤波灵活吧,对不? ?A:硬件滤波主要是通过电容电阻来组合起来滤波的,具有成本方面的优势。但如果对滤波器的滚降特性等性能要求比较高的话,恐怕要使用软件滤波来实现了。 ?Q:如何减少输入端的共模信号? ?A:主要是要注意差分走线的规范性,比如尽量做到等长平行,并且把握好阻抗控制,另外注意滤除地弹噪声和电源噪声等。 ?Q:需要做无线视频传输,带宽50Mhz,正需要高性能ADC,请给与选型指导,谢谢! ?A:你可以看看AD9230,AD9233,AD9246等! ?Q:我们想用高速ADC和DAC实现50Mhz带宽的数据采集,用于无线视频监控领域,请问是否有好的推荐和选择,需要性价比高的ADC和DAC.
伺服驱动器接线原理图
伺服驱动器接线端子说明 电源端子TB2 端子号端子记号信号名称功能 TB-1 R 主回路电源 单相或三相主回路电源端子 ~220V 50HZ 注意:不要同电机输出端子U、V、W连接 TB-2 S TB-3 T TB-4 PE 系统接地接地端子 接地电阻﹤100欧; 伺服电机输出和电源输入公共一点接地 TB-5 U 伺服电机输出伺服电机输出端子 必须与电机U、V、W端子对应连接 TB-6 V TB-7 W TB-8 r 控制电源 单相控制回路电源输入端子~220V 50Hz 备注:在SD15M的TB1中不用接。 TB-9 t 反馈信号端子CN1 端子号信号名称 端子记号 颜 色 功能记 号 I/O 方 式 CN1-5 CN1-6 CN1-17 CN1-18 5V电源 + 5V 伺服电机光电编码器用+5V电源; 电缆长度较长时,应使用多根芯线 并联,减小线路压降。 CN1-1 CN1-2 CN1-3 CN1-4 CN1-16 电源公共地0V CN1-24 编码器A+输入A+ Type4 与伺服电机光电编码器A+相连接 CN1-12 编码器A-输入A-与伺服电机光电编码器A-相连接 CN1-23 编码器B+输入B+ Type4 与伺服电机光电编码器B+相连接 CN2-11 编码器B-输入B-与伺服电机光电编码器B-相连接 CN2-22 编码器Z+输入Z+ Type4 与伺服电机光电编码器Z+相连接 CN2-10 编码器Z-输入Z-与伺服电机光电编码器Z-相连接CN1-21 编码器U+输入U+T ype4 与伺服电机光电编码器U+相连接
CN1-9 编码器U -输入 U - 与伺服电机光电编码器U -相连接 CN1-20 编码器V +输入 V + Type4 与伺服电机光电编码器V +相连接 CN1-8 编码器V -输入 V - 与伺服电机光电编码器V -相连接 CN1-19 编码器W +输入 W + T ype4 与伺服电机光电编码器W +相连接 CN1-7 编码器W -输入 W - T ype4 与伺服电机光电编码器W -相连接 控制信号输入/输出端子CN2 控制方式简称:P 代表位置控制方式 S 代表模拟量速度控制方式 端子号 信号名称 记号 I/O 方式 功能 CN2-8 输入端子的电源正极 COM + Type1 输入端子的电源正极 用来驱动输入端子的光电耦合器DC12~24V , 电流≥100m A CN2-20 指令脉冲禁 止 INH Type1 P 位置指令脉冲禁止输入端子 INH ON :指令脉冲输入禁止 INH OFF :指令脉冲输入有效 CN2-21 伺服使能 SON Type1 P,S 伺服使能输入端子 SON ON :允许驱动器工作 SON OFF :驱动器关闭,停止工作 电机处于自由状态 注1:当从SON OFF 打到SON ON 前,电机必须是静止的 注2:打到SON ON 后,至少等待5ms 再输 入命令 注3:如果用PA27打开内部使能,则SON 信号不检测。 CN2-9 报警消除 ALRS Type1 P,S 报警清除输入端子 ALRS ON :清除系统报警 ALRS OFF :保持系统报警 CN2-23 偏差计数器 清零 CLE Type1 P 位置偏差计数器清零输入端子 CLE ON :位置控制时,位置偏差计数器清零 CN2-12 模拟量输入 端 Vin Type4 S 外部模拟速度指令输入端子,单端方式,输入阻抗10千欧姆,输入范围-10V ~+ 10V 。 CN2-13 模拟量输入地 Vingnd 模拟输入的地线。 CN2伺服准备好SRDY Type2 P,S 伺服准备好输出端子
第一章简介 1.1 产品简介 交流伺服技术自八十年代初发展至今,技术日臻成熟,性能不断提高,现已广泛应用于数控机床、印刷包装机械、纺织机械、自动化生产线等自动化领域。 SDXXX系列交流伺服是本公司自主研发的新一代交流伺服驱动器,主要采用最新的IRMCK201作为核心运算单元,并采用了复杂可编程器件EPLD及三菱智能功率模块,具有集成度高,体积小,响应速度快,保护完善,可靠性高等一系列优点。适用于高精度的数控机床、自动化生产线、机械制造业等工业控制自动化领域。 与以往驱动系统相比,SDXXX交流伺服系统具有以下优点: ★伺服电机自带编码器,位置信号反馈至伺服驱动器,与开环位置控制器一起构成半闭环控制系统。 ★调速比为1:5000,从低速到高速都具有稳定的转矩特性。 ★伺服电机最高转速可达5000rpm,回转定位精度1/10000r(注:不同型号电机最高转速不同)。 ★通过修改参数可对伺服系统的工作方式、运行特性作出适当的设置,以适应不同的要求。 ★改进的空间矢量控制算法,比普通的SPWM产生的力矩更大,噪音更小。 ★高达3 倍的过载能力,带负载能力强。 ★完善的保护功能:过流,过压,欠压和编码器故障等保护。 ★监视功能允许显示18个参数状态,包括位置误差,电机转速、反馈脉冲、指令脉冲、电机电流、报警记录等。 ★高适应性,能够适应高速高精度电机,可以配套2~8磁极,400-6000线编码器的各型号电机。 1.2型号意义 1.伺服驱动器型号 S D30 MT 功能代码(M:数字量与模拟量兼容) IPM模块的额定电流(15/20/30/50/75A) 采用空间矢量调制方式(SVPWM)的交流伺服驱动器 第二章安装