1 绪论
温度是表征物体冷热程度的物理量。在很多生产过程中,特别是在冶金、化工、建材、食品、机械、石油等工业中,温度的测量和控制都直接和安全生产、提高生产效率、保证产品质量、节约能源等重大技术经济指标相联系。因此,温度的测量与控制在国民经济各个领域中均受到了相当程度的重视。
单片机系统的开发应用给现代工业测控领域带来了一次新的技术革命,自动化、智能化均离不开单片机的应用。将单片机控制方法运用到温度控制系统中,可以克服温度控制系统中存在的严重滞后现象,同时在提高采样频率的基础上可以很大程度的提高控制效果和控制精度。现代自动控制越来越朝着智能化发展,在很多自动控制系统中都用到了工控机,小型机、甚至是巨型机处理机等,当然这些处理机有一个很大的特点,那就是很高的运行速度,很大的内存,大量的数据存储器。但随之而来的是巨额的成本。在很多的小型系统中,处理机的成本占了系统成本的比例高达20%,而对于这些小型的系统来说,配置一个如此高速的处理机没有任何必要,因为这些小系统追求经济效益,而不是最在乎系统的快速性,所以用成本低廉的单片机控制小型的,而又不是很复杂,不需要大量复杂运算的系统中是非常适合的。
随着电子技术以及应用需求的发展,单片机技术得到了迅速的发展,在高集成度,高速度,低功耗以及高性能方面取得了很大的进展。现在完全可以运用单片机和电子温度传感器对某处进行温度检测,而且可以很容易地做到多点的温度检测,如果对此原理图稍加改进,还可以进行不同地点的实时温度检测和控制。
1.1 研究的目的和意义
温度是工业生产中主要被控参数之一,温度控制自然是生产的重要控制过程。工业生产中温度很难控制,对于要求严格的的场合,温度过高或过低将严重影响工业生产的产质量及生产效率,降低生产效益。这就需要设计一个良好温度控制器,随时向用户显示温度,而且能够较好控制。单片机具有和普通计算机类似的强大数据处理能力,结合PID,程序控制可大大提高控制效力,提高生产效益[1]。
例如钢铁生产过程中,按照工艺条件的规定保持一定的温度才能保证产品质量和设备的安全。对电气设备进行温度的监控,例如高压开关、变压器的出线套管等,
判断可能存在的热缺陷,进而能及时发现、处理、预防重大事故的发生。因此研究温度控制仪具有重要的意义[2]。
在单片机温度测量系统中的关键是测量温度、控制温度和保持温度,温度测量是工业对象中主要的被控参数之一。因此,单片机温度测量则是对温度进行有效的测量,并且能够在工业生产中得到了广泛的应用,尤其在电力工程、化工生产、机械制造、冶金工业等重要工业领域中,担负着重要的测量任务。在日常生活中,也可广泛实用于地热、空调器、电加热器等各种家庭室温测量及工业设备温度测量场合[3]。
目前市场上热水器的控制系统大多存在功能单一、操作复杂、控制不方便等问题,很多控制器只具有温度和水位显示功能,不具有温度控制功能.即使热水器具有辅助加热功能。也可能由于加热时间不能控制而产生过烧,从而浪费电能。本文设计的热水器控制系统以51单片机为检测控制中心单元,具有温度设定与控制功能。该控制器和以往显示仪相比具有性价比高、温度控制与显示精度高、使用方便和性能稳定等优点,提高了电能的使用效率,具有可观的经济效益和社会效益[4]。
1.2 国内外发展状况
温度控制采用单片机设计的全数字仪表,是常规仪表的升级产品。温度控制的发展引入单片机之后,有可能降低对某些硬件电路的要求,但这绝不是说可以忽略测试电路本身的重要性,尤其是直接获取被测信号的传感器部分,仍应给予充分的重视,有时提高整台仪器的性能的关键仍然在于测试电路,尤其是传感器的改进。现在传感器也正在受着微电子技术的影响,不断发展变化。传感器正朝着小型、固态、多功能和集成化的方向发展。近年来,温度控制的发展尤为迅速。国内外市场上已经出现了多种多样温度控制仪表,应用于社会的各个方面。例如能够进行程序控温的智能多段温度控制仪,能够实现数字PID和各种复杂控制规律的智能式温度调节器等[5]。
水温系统的传递函数事先难以精确获得,因而很难判断哪一种控制方法能够满足系统对控制品质的要求。但从对控制方法的分析来看,PID控制方法最适合本例采用。另一方面,由于可以采用单片机实现控制过程,无论采用上述哪一种控制方法都不会增加系统硬件成本,而只需对软件作相应改变即可实现不同的控制方案。因此本系统可以采用PID的控制方式,以最大限度地满足系统对诸如控制精度、调
节时间和超调量等控制品质的要求[6]。
传统的一位式模拟控制方案,选用模拟电路,用电位器设定值,反馈的温度值和设定值比较后,决定加热或不加热。其特点是电路简单,易于实现,但是系统所得结果的精度不高并且调节动作频繁,系统静态差大、不稳定。系统受环境影响大,不能实现复杂的控制算法,不能用数码管显示,不能用键盘设定。
传统的二位式模拟控制方案,其基本思想与方案一相同,但由于采用上下限比较电路,所以控制精度有所提高。这种方法还是模拟控制方式,因此也不能实现复杂的控制算法使控制精度做得较高,而且不能用数码管显示,对键盘进行设定[8]。
现在国内外一般采用经典的温度控制系统。采用模拟温度传感器对加热杯的温度进行采样,通过放大电路变换为0~5V 的电压信号,经过A/D 转换,保存在采样值单元;利用键盘输入设定温度,经温度标度转换转化成二进制数,保存在片内设定值单元;然后调显示子程序,多次显示设定温度和采样温度,再把采样值与设定值进行PID 运算得出控制量,用其去调节可控硅触发端的通断,实现对电阻丝加热时间的控制, 以此来调节水温使其基本保持恒定[9]。
采用单片机AT89C52设计温度实时测量及控制系统。单片机AT89C52能够根据温度传感器DS18B20所采集的温度数据来控制加热器或致冷器的启停,从而把温度控制在设定的范围之内。在温控开关被激活的情况下,当温度低于设定的下限时,单片机启动加热器加热,同时点亮绿色发光二极管,当温度高于设定的上限时,单片机启动致冷器降温,同时点亮红色发光二极管。所有温度数据均通过液晶显示器LCM1602显示出来。为了防止单片机掉电引起的数据丢失,温度上下限的设定值存储在AT24C02B中[10]。
采用一线制数字温度传感器DS18B20来作为温度传感器。传感器输出信号进4.7K的上拉电阻直接接到单片机的P1.0引脚上。DS18B20温度传感器是美国达拉斯(DALLAS)半导体公司推出的应用单总线技术的数字温度传感器。该器件将半导体温敏器件、A/D转换器、存储器等做在一个很小的集成电路芯片上。温度传感器之所以选择单线数字器件DS18B20,是在经过多方面比较和考虑后决定的[11]。
从硬件和软件两方面来讲述水温自动控制过程,在控制过程中主要应用AT89C52、ADC0809、LED显示器、LM324比较器,而主要是通过DS18B20数字温度传感器采集环境温度,以单片机为核心控制部件,并通过四位数码管显示实时
温度的一种数字温度计。软件方面采用汇编语言来进行程序设计,使指令的执行速度快,节省存储空间。为了便于扩展和更改,软件的设计采用模块化结构,使程序设计的逻辑关系更加简洁明了,使硬件在软件的控制下协调运作。而系统的过程则是:首先,通过设置按键,设定恒温运行时的温度值,并且用数码管显示这个温度值.然后,在运行过程中将采样的温度模拟量送入A/D转换器中进行模拟数字转换,再将转换后的数字量用数码管进行显示,最后用单片机来控制加热器,进行加热或停止加热,直到能在规定的温度下恒温加热[12]。
2 系统总体设计
2.1 系统设计任务与要求
该温度自动控制系统采用AT89C52单片机为主控芯片,传感器采用数字温度传感器DS18B20,实现对温度的检测和控制。
技术要求:
1、能够连续测量水的温度值,用十进制数码管来显示实际温度,最小单位为1℃。
2、能够设定水的温度值,设定范围是30℃~90℃,温度误差≤±0.5℃。
3、能够实现水温的自动控制,如果设定水温为80℃,则能使水温保持恒定在80℃的温度下运行。
4、用单片机AT89C52控制,通过按键来控制水温的设定值,数值采用数码管显示。
该温度自动控制系统由温度信号采样电路,键盘及显示电路,温度控制电路,报警电路,时钟信号电路等构成,并运用PID算法进行温度控制和调整。
根据设计任务,详细分析温度自动控制系统的设计需求,并进行软硬件的总体设计。由键盘电路输入设定温度信号给单片机,温度信号采集电路采集现场温度信号给单片机,单片机根据输入与反馈信号的偏差进行PID计算,输出反馈量给温度控制电路,实现升温。显示电路实现现场温度的实时监控。设计人员需完成全部硬件和软件的设计,并利Altium Designer 6.0仿真软件对设计结果进行验证。
2.2 系统方案的选择
在这个系统中我们从性能及设计成本考虑,我们选择AT89C52芯片。AT89C52的广泛使用,使单片机的价格大大下降。在温度传感器的选择上我们采用温度芯片DS18B20测量温度。该芯片的物理化学性很稳定,它能用做工业测温元件,且此元件线形较好。该芯片直接向单片机传输数字信号,便于单片机处理及控制。本制作的最大特点之一就是直接采用温度芯片对温度进行测量,使数据传输和处理简单化。采用温度芯片DS18B20测量温度,体现了作品芯片化的这个趋势。部分功能电路的集成,使总体电路更简洁,搭建电路和焊接电路时更快。而且,集成块的使用,有效地避免外界的干扰,提高测量电路的精确度。在这个过程中,我们通过单
片机将传感器所测量出来的温度通过数码管可以显示出来。这样就能实时显示温度情况[13]。
本设计采用了PID控制。在工程实际中,PID控制器以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型,控制理论的其他技术也难以采用,系统控制器的结构和参须依靠经验和现场调试来确定时,应用PID控制技术最为方便。
PID控制器的参数整定是控制系统设计的核心内容。它是根据被控过程的特性确定PID控制器的比例系数、积分时问和微分时间的大小。PID控制器参数整定的方法概括起来有两大类:一是理论计算整定法。它主要是依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。二是工程整定方法,它主要依赖工程经验,直接且方法简单、易于掌握,在实际中被广泛应用[14]。
3 器件和模块的选用
3.1 AT89C52单片机
AT89C52是一种低功耗、高性能8位微控制器,具有8K 在系可编程Flash 存储器。片上Flash允许程序存储器在系统可编程,亦适于常规编程器。在单芯片上,拥有灵巧的8 位CPU 和在系统可编程Flash,使AT89C52为众多嵌入式控制应用系统提供高灵活、有效的解决方案。
AT89C52具有以下标准功能:8k字节Flash,256字节RAM,32 位I/O 口线,看门狗定时器,2个数据指针,三个16位定时器/计数器,一个6向量2级中断结构,全双工串行口,片内晶振及时钟电路。另外,AT89C52 可降至0Hz 静态逻辑操作,支持2种软件可选择节电模式。空闲模式下,CPU停止工作,允许RAM、定时器/计数器、串口、中断继续工作。掉电保护方式下,RAM内容被保存,振荡器被冻结,单片机一切工作停止,直到下一个中断或硬件复位为止[15]。
其主要工作特性为:
1、内含8KB的Flash存储器,擦写次数达1000次;
2、内含128字节的RAM;
3、具有32根可编程I/O线;
4、具有2个16位可编程定时器;
5、具有6个中断源、5个中断矢量、2级优先权的中断结构;
6、具有1个全双工的可编程串行通信接口;
7、具有1个数据指针DPTR;
8、两种低功耗工作模式,即空闲模式和掉电模式;
9、具有可编程的3级程序锁定位;
10、工作电源电压为5±1.2V,典型值为5V;
11、最高工作频率为24MHz。
引脚排列如图3.1所示。
图3.1 A T89C52引脚排列
3.2 DS18B20传感器
DS18B20原理与特性:采用了DS18B20单总线可编程温度传感器,来实现对温度的采集和转换,大大简化了电路的复杂度,以及算法的要求。首先来介绍一下DS18B20这块传感器的特性及其功能: DSl8B20的管脚及特点DS18B20可编程温度传感器有3个管脚。内部结构主要由四部分组成:64位光刻ROM、温度传感器、非挥发的温度报警触发器TH和TL、配置寄存器。
GND为接地线,DQ为数据输入输出接口,通过一个较弱的上拉电阻与单片机相连。VDD为电源接口,既可由数据线提供电源,又可由外部提供电源,范围3.0~5.5 V。本文使用外部电源供电。
主要特点有:
1. 用户可自设定报警上下限温度值。
2.不需要外部组件,能测量-55~+125℃范围内的温度。
3.-10℃~+85℃范围内的测温准确度为±0.5℃。
4.通过编程可实现9~l2位的数字读数方式,可在至多750 ms内将温度转换成12 位的数字,测温分辨率可达0.0625℃。
5.独特的单总线接口方式,与微处理器连接时仅需要一条线即可实现与微处理器双向通讯。
6.测量结果直接输出数字温度信号,以“一线总线”串行传送给CPU,同时可传送CRC校验码,具有极强的抗干扰纠错能力。
7.负压特性:电源极性接反时,芯片不会因发热而烧毁,但不能正常工作。
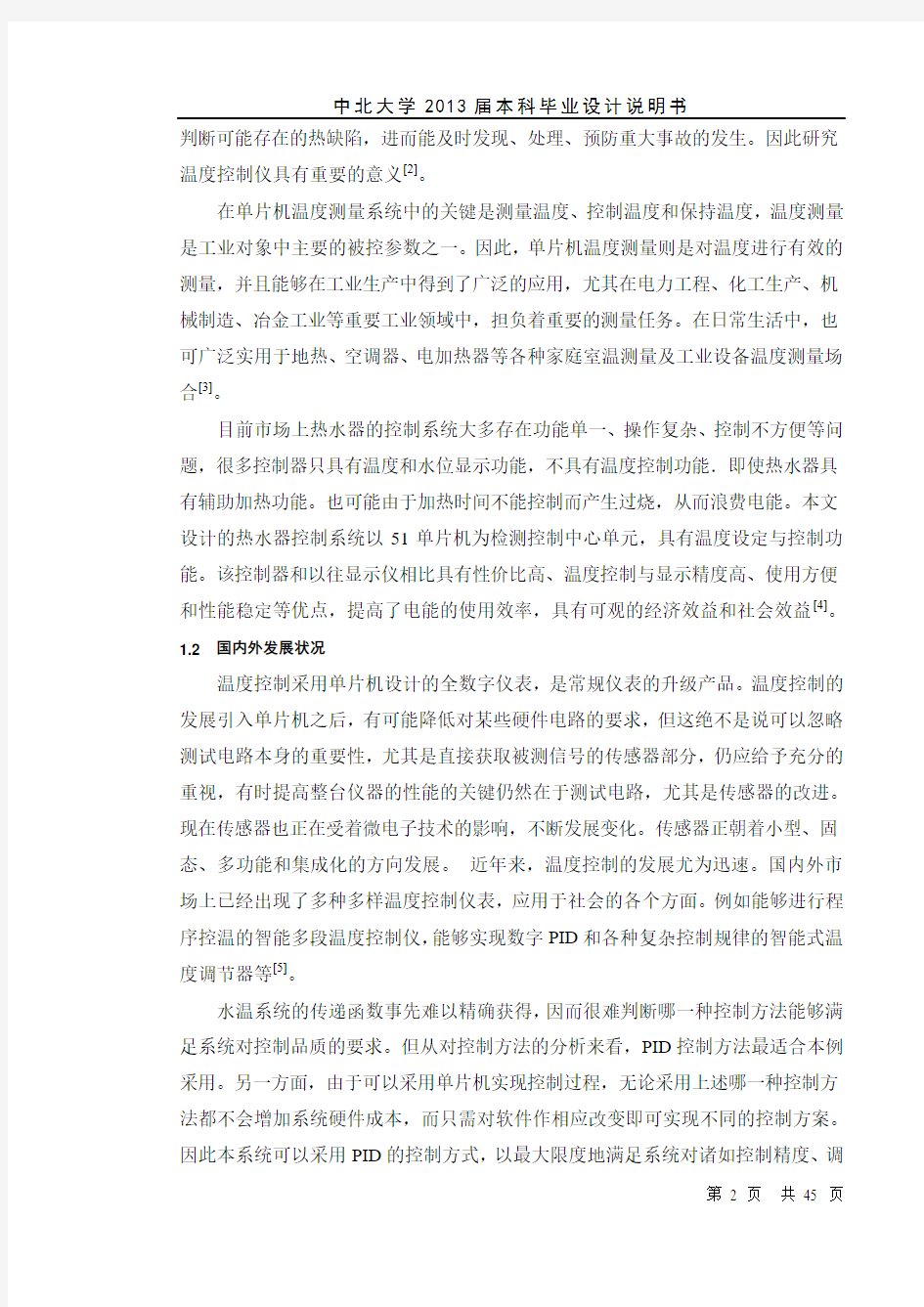
DS18B20支持多点组网的功能,多个DS18B20可以并联在唯一的三线上,实现组网多点测温。DS18B20的读写时序和测温原理与DS1820相同,只是得到的温度值的位数因分辨率不同DS18B20 为9位~12位A/D转换精度,而DS1820为9位A/D转换,虽然我们采用了高精度的芯片,但在实际情况上由于技术问题比较难实现,而实际精度此时温度寄存器中的数值即为所测温度。斜率累加器用于补偿和修正测温过程中的非线性,其输出用于修正计数器1的预置值。如下3.2的测温原理图不同,且温度转换时的延时时间由2s减为750ms。DS18B20测温原理如图3.2所示:
图3.2 DS18B20的测温原理框图
图中低温度系数晶振的振荡频率受温度影响很小,用于产生固定频率的脉冲信号送给计数器1。则高温度系数晶振随温度变化其振荡率明显改变,所产生的信号
作为计数器2的脉冲输入。计数器1和温度寄存器被预置在-55℃所对应的一个基数值时。计数器1对低温度系数晶振产生脉冲信号,进行减法计数,当计数器1的预置值减到0时,温度寄存器的值将加1,计数器1的预置将重新被装入,计数器1重新开始对低温度系数晶振产生的脉冲信号进行计数,如此循环直到计数器2计数到0时,停止温度寄存器值。
在DS18B20测温程序设计中,向DS18B20发出温度转换命令后,程序要等待DS18B20的返回信号,一旦某个DS18B20接触不好或断线,当程序读该DS18B20时,将没有返回信号,程序进入死循环。这一点在进行DS1820硬件连接和软件设计时也要给予一定的重视。测温电缆线采用屏蔽4芯双绞线,其中有一对接地线与信号线,另一组接VCC和地线。
3.3 复位和时钟电路的设计
本系统中采用自动复位和手动复位键复位相的方式。系统时钟电路设计采用内部方式。AT89C52内部有一个用于构成振荡器的高增益反相放大器。这个放大器与作为反馈元件的片外晶体谐振器构成一个自激振荡器。外接晶体谐振器以及电容构成并联谐振电路,接在放大器的反馈回路中。本系统电路采用的晶体振荡器频率为11.0592MHz。采用这种频率的晶体振荡器的原因是可以方便的获得标准的波特率。复位电路和时钟电路如图3.3所示。复位电路有上电自动复位和按钮手动复位两种。上电复位是利用电容充电来实现的,上电瞬间RST/VPD端的电位与VCC相同,随着充电电流的减少,RST/VPD的电位逐渐下降,图3.3中的10K的电阻是施密特触发器输入端的一个下拉电阻,时间常数为10*10-6*10*103s=100ms,只要Vcc的上升时间不超过1ms,振荡器建立时间不超过10ms,这个时间常数足以保证完成复位操作。上电复位所需最短时间是震荡周期建立时间加上2个机器周期时间。按钮复位采用电平复位方式,按下复位电钮时,电源对外接电容充电,使RST/VPD端为高电平,复位按钮松开后,电容通过内部下拉电阻放电,逐渐使RST/VPD端恢复低电平[16]。
图3.3 复位电路和时钟电路
3.4 温度采集电路
数据采集电路如图3.4所示,1脚接地,2脚即为单总线数据口,3脚接电源。温度传感器DS18B20采集被控对象的实时温度,提供给AT89C52的P3.5口作为数据输入。
图3.4 数据采集电路
3.5 显示电路的设计
数码管显示部分,采用与单片机相连接,将温度传感器采集到的信息迅速转化为可视温度,增加了可读性[17]。
图3.5 数码管显示电路图
3.6 温度控制
采用实时控制的方法,主机AT89C52输出温度控制信号,控制可控硅控制温度控制电路。温度控制电路主要由加热器跟制冷气构成,使用前人可以对所需求的恒温进行设置,设定温度通过数码管可显示。温度设置完成后DS18B20采集环境中的温度。采集到的温度传回单片机,然后对设置温度与采集的温度进行PID计算计算出控制量,AT89C52输出温度控制信号,控制可控硅对加热器或者制冷器开始工作使温度达到所需求的温度保持恒定。当温度达到设定值时蜂鸣报警系统报警,一次温度控制完成。
3.7 供电系统
供电部分采用TL431构成的恒压源,TL431是一个有良好的热稳定性能的三端可调分流基准源。他的输出电压用两个电阻就可以任意的设置到从Verf(2.5V)到
36V范围内的任何值。该器件的典型动态阻抗为0.2Ω。其稳压电路图如图3.6:
图3.6 供电电路
4 PID 控制和参数整定
4.1 PID 调节器控制原理
PID 控制器是一种线性控制器,一种它根据给定值rin(t)与实际输出值yout(t)构成控制偏差:
Error(t)=rin(t)-yout(t)
PID 控制就是对偏差信号进行比例、积分、微分运算后,形成一种控制规律。即,控制器的输出为:
????
??++=?t D dt t derror T dt t error T t error 01p )()(1)(k u(t) (4.1) 或写成传递函数的形式: ???
? ??++==s T s T k s E s U s D p 11
1)()()G( (4.2) 式中
,
kp ——比例系数;Ti ——积分时间常数;Td ——微分时间常数。简单
说来,PID 控制器各校正环节的作用如下:
比例环节:成比例地反映控制系统的偏差信号error(t),偏差一旦产生,控制器立即产生控制作用,以减小偏差。 比例控制: Gc(s)= Kp
积分环节:主要用于消除静差,提高系统的无差度。积分作用的强尽弱取决于积分 时间常数Ti ,Ti 越大,积分作用越弱,反之则越强。 积分控制: Gc(s) = Kp/T is
微分环节:反偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前, 在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间[7]。
微分控制: Gc(s) =KpT ds
4.2 PID 控制的分类
基本PID 控制器的理想算式为
()???
???
++
=?
f
d
f p dt t de T dt t e T t e K 0
)()(1)(t u (4.3)
式中
u(t)——控制器(也称调节器)的输出;
e(t)——控制器的输入(常常是设定值与被控量之差,即e(t)=r(t)-c(t)); Kp ——控制器的比例放大系数; Ti ——控制器的积分时间; Td ——控制器的微分时间。
设u(k)为第k 次采样时刻控制器的输出值,可得离散的PID 算式
(4.4)
由于计算机的输出u(k)直接控制执行机构(如阀门),u(k)的值与执行机构的位置(如阀门开度)一一对应,所以称式(4.4)为位置式PID 控制算法。
位置式PID 控制算法的缺点:当前采样时刻的输出与过去的各个状态有关,计算时要对e(k)进行累加,运算量大;而且控制器的输出u(k)对应的是执行机构的实际位置,如果计算机出现故障,u(k)的大幅度变化会引起执行机构位置的大幅度变化。 增量式只需计算增量,算式中不需要累加,控制增量的确定仅与最近几次偏差采样值有关,当出现计算误差或精度不足时,对控制量计算的影响较小,且较容易通过加权处理获得比较好的控制效果。
4.3 数字PID 参数的整定
PID 控制器的参数整定是控制系统设计的核心内容。它是根据被控过程的特性确定PID 控制器的比例系数、积分时间和微分时间的大小。PID 控制器参数整定的方法很多,概括起来有两大类:一是理论计算整定法。它主要是依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。二是工程整定方法,它主要依赖工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。本设计采用PID 归一整定法把对控制台三个参数(Kc 、Ti 、Td,)转换为一个参数
KP , 从而使问题明显简化。以达到控制器的特性与被控过程的特性相匹配,满足某种反映控制系统质量的性能指标[15]。
4.4 PID 计算程序
PID 调节规律的基本输入输出关系可用微分方程表示为:
??
?
??
?++
=?t
D
I
P dt t de T dt t e T t e K t u 0
)()(1
)()( (4.5) 式中)(t e 为调节器的输入误差信号,且
)()()(t C t r t e -= (4.6) 其中:)(t r 为给定值,)(t C 为被控变量; )(t u 为调节器的输出控制信号; P K 为比例系数; I T 为积分时间常数; D T 微分时间常数。
计算机只能处理数字信号,若采样周期为T 第n 次采样的输入误差为n e ,且
)()(n C n r e n ==,输出为)(n u ,PID 算法用的微分
dt de
由差分T
e e n n 1--代替,积分dt t e t
?0
)(由∑T e
K
代替,于是得到
??
?
??
?-++
=-=∑T e e T T T e K u n n D n
i I n P n 101
(4.7)
写成递推形式为
△1--=n n n u u u
=?????
?+-+-+-∑∑=---=-n
i n n n D n i i i I n n P e e e T T e e T T e e K 021101)2()()(
=??
????+-++----)2()(211n n n D n I n n P e e e T T e T T
e e K
=)2()(211---+-++-n n n D n I n n P e e e K e K e e K
=D I P P P P ++ (4.8) 其中:)(1--=n n P P e e K P (4.9) n I n I
P
I e K e T T
K P == (4.10) )2()2(2121----+-=+-=n n n D n n n D
P
D e e e K e e e T
T K P (4.11) 显然,PID 计算△un 只需要保留现时刻en 以及以前的两个偏差量en-1和en-2。初始化程序初值en-1= en-2 =0 通过采样并根据参数KP 、KD 、KI 以及en 、en-1和en-2计算△un 。
根据输出控制增量△un ,可求出本次控制输出为
1
-=n n u u +△
n u =D
I P n P P P u +++-1 (4.12)
下面对PID 运算加以说明:
所有的数都变成定点纯小数进行处理。
算式中的各项有正有负,以最高位作为符号位,最高位为0表示为正数,为1表示负数。正负数都是补码表示,最后的计算以原码输出。
节16位进行计算,最后将运算结果取成高8位有效值输出。输出控制量un 的限幅处理。为了便于实现对晶闸管的通断处理,PID 的输出在0~250之间。大于250或小于0的控制量
n
u 都是没有意义的,因在算法上对
n
u 进行限幅,即
n u =???
??≥<<≤max
max
max min min
min
u u u u u u u u u u n n n
n (4.13)
图4.1 PID 计算程序的流程图
PID 的计算公式采用位置式算法,计算公式为 1-=n n u u +)2()(211---+-++-n n n D n I n n P e e e K e K e e K
=D I P n P P P u +++-1 (4.14)
5 软件设计
系统的软件主要由主程序模块、数据采集模块、数据处理模块、控制算法模块等组成。主模块的功能是为其余几个模块构建整体框架及初始化工作;数据采集模块的作用是将数字量采集并储存到存储器中;数据处理模块是将采集到的数据进行一系列的处理,其中最重要的是数字滤波程序:控制算法模块完成控制系统的PID 运算并且输出控制量。
5.1 主程序模块
主程序模块要做的主要工作是上电后对系统初始化和构建系统整体软件框架,其中初始化包括对单片机的初始化、串口初始化等。然后等待温度设定,若温度已经设定好了,判断系统运行键是否按下,若系统运行,则依次调用各个相关模块,循环控制直到系统停止运行[18]。
设计模块图如下图5.1所示。
图5.1 设计模块图
主程序模块的程序流程图如图5.2所示。
N
Y
5.2 数据采集和显示模块
数据采集模块的任务是负责温度信号的采集以及将采集到的数字量提供给单片机。
AT89C52通过控制DS18B20读取实时温度,然后,通过P0口送到数码管进行
测控电路设计 专业:测控技术与仪器 班级:11050341 姓名: 学号:
五路呼叫器 1.设计思路 本次课程设计是基于DE2开发板的设计,因此本电路在总体设计的时候考虑了如下几个方面: (1)呼叫源的输入: 设计要求用五个输入键代替呼叫源。对于DE2板上产生触发脉冲的键,它保持原输入状态只是一瞬间。但在优先级判别过程中必须不断调用原输入状态,所以必须将输入量保存起来。 (2)呼叫源的过程处理: 在本设计要求中,当有多个呼叫同时发生时,用指示灯指明多个呼叫源在同时呼叫,并按优先级顺序由数码管显示多个呼叫源号码。1号呼叫源优先级最高,按顺序5号呼叫源优先级最低。 这次课程设计中我使用了计数器扫描的方式,从一号呼叫源(优先级最高)开始,对各个已经保存的输入量依次进行扫描。当遇到一个高电平,即有呼叫源呼叫时,便对相应的呼叫源进行编码、译码,送到输出端口显示其相应的呼叫号;延时一定时间后,再扫描下一个呼叫源。如果某一呼叫源没有呼叫,则跳过该呼叫源,对下一个呼叫源进行扫描。因此,在呼叫源间的显示不会间隔时间太久,而可以有快速的对应显示。这样由一号呼叫源到五号呼叫源不断地进行循环扫描,其扫描的个数由计数器进行控制。即对五个呼叫源都扫描一次后,对计数器清零,进行下一次扫描。如此不断的循环和显示呼叫源号。当任何一个呼叫源有输入时,扫描器再次从第一个呼叫源开始扫描,做到优先序扫描。 (3)输出处理: 按任务要求和根据DE2板的硬件设置,必须将呼叫源信号编制成对应的BCD码输出。输出的BCD码经DE2板的硬件设置,实现译码和显示。
2.设计方案 2.1设计原理框图 图1设计原理图 2.2主要模块介绍 计数扫描:利用74161进行计数扫描,保证呼叫可以插入。 信号保持:利用74112来保存开关量,把各路输入的信号一直保存到下一个呼叫信号到来为止,而且可以随时插入不同优先级别的呼叫信号。 指示灯显示:当有多个呼叫同时发生时,用指示灯指明多个呼叫源在同时呼叫。利用简单的门电路完成此功能。 选通及优先编码:利用门电路对计数和输入信号进行选通,再通过74148对选通后的信号进行编码,完成按优先级顺序由数码管显示多个呼叫源号码的功能。 3.单元电路设计 3.1输入信号的处理 由于DE2实验板上的触发脉冲按键产生的触发信号只是一瞬间,而在优先级判别和多输入判别的过程中需要多次调用源输入状态,所以需要一个具有锁存功能的的电路将输入信号保存起来。在设计初始,考虑使用SR 锁存器,但是考虑到改电路系统对输入信号要具有单独 选通 译码 计数扫描时钟脉冲信号保持 呼叫输入优先编码 指示灯显示多 个呼叫 译码显示呼叫号
中北大学 毕业设计开题报告 学生姓名:学号: 系别:机械工程与自动化学院、机械工程系专业:机械设计制造及其自动化 论文题目: 指导教师:教授 2012年03月13日
毕业设计开题报告
换方法所用数据较少,所建模型的阶数低,但对数据个数要求严格;最大熵谱法属时间序列分析建模方法,只需传感器动态标定中的,但它建模的准确性不高。神经元方法虽然具有所建模型阶次低准确度高的优点,但离现实应用还有一定的距离。此文章在研究各种建模的方法上,提出了先对所测数据进行积分,再用辨识方法进行建模,减少转换误差,所建模型准确度较高,阶次较低,且较易实现递推算法,为改善传感器动态特性,实现动态补偿奠定基础[3]。 在研究传感器的动态补偿中,黄杭美在FLANN传感器动态方法中指出,为满足快速 称重求的要求,结合遗传算法寻优速度快和函数联接型神经网络有较强的函数逼近能力的优点,设计了一种基于遗传算法优化的FLANN补偿器,实现对称重传感器的动态特性补偿,采用遗传算法优化FLANN的连接权值。此种方法的仿真表明:阶跃响应时间快,且超调量小,有效地提高了称重传感器的动态响应过程,且方法简单,易于工程实现,易于实用价值[4]。 在称重传感器动态补偿器的一种新的设计方法中,俞阿龙和李正为了拓展称重传感器的工作频带,把电荷转移器件用于其动态补偿器的设计中,设计出具有频率特性可调节的动态补偿器。由于称重传感器的动态特性不理想,输出响应不能精确反应输入量,在称重传感器后串联一个补偿器即构建一个动态补偿模型,和传感器一起构成一个理想的动态测试系统,就可对传感器的动态特性补偿。此文章对称重传感器的动态补偿器的设计方法进行了深入的研究,把电荷转移器件用于设计中,由于CTD器件具有模拟性和数字性相结合的突出特点,由此而设计的补偿器具有稳定性好,不存在阻抗匹配等优点[5]。 国外研究人员Pasquale Arpaia等人员在研究称重传感器的过程当中,提出了称重传感器的一些动态模型的自适应的补偿方法,有系统辨识法,根轨迹法和神经网络的方法等,在各种各样的算法实现中,即可用软件实现,也可用硬件实现。用设计要基于传感器的软件方法补偿时,参数设计灵活,使用方便,主要问题是数据处理的实时性问题;而用硬件补偿时实时性好,但有时电路参数调整比较麻烦。因为动态补偿器的设计要基于传感器的动态模型,在测量中所测重量将成为传感器参数的一部分,传感器的动态模型会随着被测重量而变化。这就要求设计出一些相应的动态补偿器去实现称重过程中响应的快速性和准确性。而国外仅仅抓住研究课题,在相应的生产领域也设计出了准确度、稳定性和可靠性都达到一定要求的称重传感器,在产品结构设计与制造工艺中,
中北大学 数据结构与算法课程设计 说明书 学院、系:软件学院 专业:软件工程 班级: 学生姓名:学号: 设计题目:最小生成树问题 起迄日期: 2015年1月12日- 2015年1月29日指导教师:王秀娟 2015 年1月 29 日
1需求分析 1.1已知一个无向连通网表示n个城市以及城市间可能设置的通信网络线路,其中网的顶点表示城市,边表示两个城市之间的线路,赋于边上的权值表示相应的代价。对于n个点的连通网能建立许多不同的生成树,每一棵生成树都可以是一个通信网。我们要选择一棵生成树,使总的耗费最小。 1.2该无向连通图的建立需要使用两种存储结构,即邻接表和邻接矩阵。 1.3实现最小生成树需要使用两种算法。即普里姆算法和克鲁斯卡尔。 1.4程序通过人机交互实现数据的输入和输出。 2选题要求 设计内容: 在n个城市之间建设网络,只需保证连通即可,求最经济的架设方法。存储结构采用(邻接表和邻接矩阵)两种,采用课本上的两种求解算法。 设计要求: (1) 符合课题要求,实现相应功能; (2) 要求界面友好美观,操作方便易行; (3) 注意程序的实用性、安全性。 3程序设计方法及主要函数介绍 ADT Graph{ 数据对象V;V是具有相同特性的数据元素的集合,成为顶点集。 数据关系R: R = {VR} VR = {(v,w)|v,w为V集合中的元素,(v,w)表示v和w之间存在的路径} 基本操作P; CreateMGraph(MGraph *G) 初始条件:V是图的顶点集,VR是图的边的集合。 操作结果:按V和VR的定义构造图G,用邻接矩阵存储。 CreateALGraph(ALGraph *G)
中北大学 论文撰写格式和内容的有关要求 一、装订顺序 论文(设计说明书)内容一般应由9个部分组成,严格按以下顺序装订,但学院可根据专业特点制订装订项目。 (1) 封面 (6) 正文 (2) 中文摘要 (7) 附录(根据具体情况可省略) (3) 英文摘要 (8) 参考文献 (4) 目录 (9) 致谢 (5) 主要符号表(根据具体情况可省略) 二、内容及书写格式要求 1、毕业设计说明书(毕业论文)应用中文撰写(外语专业除外)。 2、毕业设计(论文)成果分毕业设计说明书和毕业论文两种,所有出现相关字样之处请根据具体情况选择“毕业设计说明书” 或“毕业论文”字样。 3、毕业设计说明书(毕业论文)Word软件编辑,一律打印在A4幅面白纸上,单面打印。 4、毕业设计说明书(毕业论文)的上边距:30mm;下边距:25mm;左边距:3Omm;右边距:2Omm;行间距1.5倍行距。 5、页眉的文字为“中北大学XXXX届毕业设计说明书” 或“中北大学 ××××届毕业论文”,用小四号黑体字,页眉线的上边距为25mm;页脚的下边距为18mm。 6、论文页码从引言部分开始,至致谢止,在页脚中标出。封面、摘要、目录不编入页码,目录单独编页码。 7、正文用小四号宋体字;每章的大标题用小三号黑体,加粗,留出上下间距为:段前0.5行,段后0.5行;二级标题用小四号黑体,加粗;其余小标题用小四号黑体,不加粗。 8、文中的图、表、附注、公式一律采用阿拉伯数字分章编号。如图1.2,表2.3,附注3.2或式4.3。
图表应认真设计和绘制,不得徒手勾画。表格与插图中的文字一律用5号宋体。 每一插图和表格应有明确简短的图表名,图名置于图之下,表名置于表之上,图表号与图表名之间空一格。插图和表格应安排在正文中第一次提及该图表的文字的下方。当插图或表格不能安排在该页时,应安排在该页的下一页。 图表居中放置,表尽量采用三线表。每个表应尽量放在一页内,如有困难,要加“续表X.X”字样,并有标题栏。 图、表中若有附注时,附注各项的序号一律用阿拉伯数字加圆括号顺序排,如:注①。附注写在图、表的下方。 文中公式的编号用圆括号括起写在右边行末顶格,其间不加虚线。 9、文中所用的物理量和单位及符号一律采用国家标准,可参见国家标准《量和单位》(GB3100~3102-93)。 10、文中章节编号可参照《中华人民共和国国家标准文献著录总则》,见(附件二)。 每一部分的具体要求如下: (1)封面 封面排版规范见(附件一),一律要求计算机打印。 (2)中文摘要 摘要内容及排序: 设计(论文)题目(小三号黑体居中) “摘要”字样(小四号黑体) 摘要正文(小四号宋体) 关键词 摘要是设计说明书(论文)内容的简短陈述,体现工作的核心思想。摘要应涉及本项研究工作的目的和意义、研究方法、研究成果。一般不少于200字。 关键词应为反映论文主题内容的通用技术词汇,不得随意自造关键词。摘要内容后下空一行打印“关键词”三字 (小四号黑体),关键词一般为3~5个,每一关键词之间用逗号分开,最后一个关键词后不打标点符号。 (3)英文摘要
苏州市职业大学2014─2015学年第1学期试卷 《MATLAB 工程应用》 (分散 A 卷 开卷 设计) 出卷人 宋秦中 出卷人所在学院 电子信息工程学院 使用班级 12电子1,12电子2 班级 12 应用电子技术1 学号 127303110 姓名 施晓蓉 第1页,共21页 一、设计题(满分100分) 请在以下题目中任选一项完成设计 1. 汽车运动控制系统设计; 2. 电烤箱温度控制系统设计 3. 汽车减震系统建模仿真; 4. 汽车自动巡航控制系统的PID 控制; 5. 汽车怠速系统的模糊PID 控制; 6. 双闭环直流调速系统的设计与仿真 7. 自选测控项目(给出你自选的题目) 8. 本份试题选取项目为: 电烤箱温度控制系统设计 附评分细则:
《MATLAB工程应用》期末考试设计报告 第一章概述 本次课题的主要内容是通过对理论知识的学习和理解的基础上,自行设计一个基于MA TLAB 技术的PID控制器设计,并能最终将其应用于一项具体的控制过程中。以下为此次课题的主要内容: (1) 完成PID控制系统及PID调节部分的设计 其中包含系统辨识、系统特性图、系统辨识方法的设计和选择。 (2) PID最佳调整法与系统仿真 其中包含PID参数整过程,需要用到的相关方法有: b.针对有转移函数的PID调整方法 主要有系统辨识法以及波德图法及根轨迹法。 (3) 将此次设计过程中完成的PID控制器应用的相关的实例中,体现其控制功能(初步计划为温度控制器) 第2页,共21页
第二章调试测试 2.1进度安排和采取的主要措施: 前期:1、对于MA TLAB的使用方法进行系统的学习和并熟练运用MA TLAB的运行环境,争取能够熟练运用MA TLAB。 2、查找关于PID控制器的相关资料,了解其感念及组成结构,深入进行理论分析,并同步学习有关PID控制器设计的相关论文,对其使用的设计方法进行学习和研究。 3、查找相关PID控制器的应用实例,尤其是温度控制器的实例,以便完成最终的实际应用环节。 中期:1、开始对PID控制器进行实际的设计和开发,实现在MATLAB的环境下设计PID控制器的任务。 2、通过仿真实验后,在剩余的时间内完成其与实际工程应用问题的结合,将其应用到实际应用中(初步计划为温度控制器)。 后期:1、完成设计定稿。 2、打印以及答辩工作地准备。 2.2被控对象及控制策略 2.2.1被控对象 本文的被控对象为某公司生产的型号为CK-8的电烤箱,其工作频率为50HZ,总功率为600W,工作范围为室温20℃-250℃。设计目的是要对它的温度进行控制,达到调节时间短、超调量为零且稳态误差在±1℃内的技术要求。 在工业生产过程中,控制对象各种各样。理论分析和实验结果表明:电加热装置是一个具有自平衡能力的对象,可用二阶系统纯滞后环节来描述。然而,对于二阶不振荡系统,通过参数辨识可以降为一阶模型。因而一般可用一阶惯性滞后环节来描述温控对象的数学模型。 所以,电烤箱模型的传递函数为: 第3页,共21页
数据库课程设计安排 本课程设计时间为15~17周,既定与17周周五全天验收,验收时请带好自己的身份证和学生证。验收安排会提前1~2天公示。 一、强调注意事项 1、必须按要求到指定机房上机、上机过程中不准许打游戏,打游戏者成绩直接在汇总成绩的基础上降两档。老师会对学生进行考勤,缺勤三次者直接取消验收资格。如需请假,请履行正常的请假手续。(如上机时间与考试时间冲突,以考试为主,不需请假) 2、每人一题,必须自己独立完成布置题目的设计并完成相应的报告。 3、每天有对应老师值班,参加课程设计的老师有 责任教师所在办公室 洪军213 李玉蓉215 杨顺民213 薛海丽215 康珺215 李华玲215 何志英215 贾美丽215 尹四清212 4、替考者,双方成绩直接以0分记。 5、周1~周二,自己进行题目的需求分析,周二课程设计任务书电子版自行到软件学院机房首页“洪军”文件夹下下载,(word文档。名称为“数据库课程设计任务书”),周三开始安排上机。 6、登记班长或学委的联系方式,周一确认是否所有学生已经领取到题目,题目序号与班级学生序号或学号相对应。学号断续的,自动向上补齐。 7、请同学们认真对待本次课程设计,我们会严格要求。验收方式为上机答辩,准备好自己的证件、报告、源程序(上机提前调试好),老师与学生1对1进行验收。 8、学生课程设计是实践的重要环节,学生课程设计期间不准私自离开学校。 二、考核方法及成绩评定 考核方式: 1、上机检查应用程序 2、口头质疑 3、审查设计报告 成绩最终由平时考评+程序验收+报告内容三部分组成。 一、内容及安排
1、设计一个简单的数据库应用系统,该系统应具备对数据进行录入、修改、删除、查询、统计、报表等功能; 2、学生应根据指定的设计题目进行用户调查,确定设计内容, 综合运用数据库和软件工程等课程的知识进行系统设计; 3、系统设计原则及方案选定正确,软件模块结构及有关数据结构、数据库结构合理,设计过程及文档的编写遵循软件工程规范,体现数据库设计全过程; 4、软件运行正确,提交软件文档资料齐全,思路正确; 5、熟练掌握一种数据库管理系统。 设计题目 1、病历管理系统 2、药物管理系统 3、户口管理系统 4、教材管理系统 5、列车时刻查询系统 6、光碟管理系统 7、电脑配件库存管理系统 8、人事管理系统 9、工资管理系统 10、单位住房管理系统 11、成绩管理系统 12、学籍管理系统 13、财务管理系统 14、图书管理系统 15、宿舍管理系统 16、民航售票管理系统 17、合同管理系统 18、学生档案管理系统 19、水电管理系统 20、试题库管理系统 21、机房管理系统 22、学费管理系统 23、考点考务管理系统 24、排课系统 25、银行储蓄系统 26、设备管理系统 27、医院药品进销存系统 28、英语学习助手 29、教务辅助管理系统 30、学院综合奖学金评定系统
钛合金粉末激光熔敷 WEN Jialing NIU Quanfeng XU Yanmin 摘要:这篇文章旨在如何通过利用B,Si和Cr等元素提高硬度和耐磨性,利用稀土元素提高合金性能。基于铁基合金(Fe-Cr-Ni-B-Si-Re)的实验,通过一系列的实验和综合分析,包括表面质量、频谱复合、显微硬度、显微扫描和综合评价,得到最优方案。结果,Fe-Cr-Ni-B-Si-Re涂覆材料具有很好的性能。 关键字:激光熔敷;微观结构;合金;硬度 1 前言 激光熔敷是目前最具发展前景的表面改性技术之一,它能花费很小的代价在一种普通材料表面形成很好的性能。从而节约稀有材料和贵重材料。其应用前景极其广阔。作为一种表面硬化材料,Fe-Cr-Ni-B-Si-Re是自溶性合金,在正常温度范围之内和400℃以下,它的耐磨性比WC-Ni基合金、钴基合金以及其他铁基合金都要好。考虑到下列因素,同钴基合金、镍基合金、陶瓷相比铁合金在激光熔覆方面的优越性能,稀有元素的节约,与基体熔覆的可比性,与其他合金相比更低的成本,利用铁基进行激光熔敷具有战略性意义和重要的经济价值。 2 实验 2.1 设计目的 本文目的在于找到每种合金的最佳比例,以优化经济方案,提高激光熔敷技术,活的光滑的非氧化熔覆表面,更好的湿度效果和适当的稀释率。用做实验的熔融包层不能有宏观和微观缺陷且耐磨硬度应大于58HRC. 2.2 样品和尺寸 实验所用样品是Q235B钢,这种钢在工业上广泛应用。考虑到激光熔敷的特点,更大的功率密度和简便的操作,样品的尺寸定为40mm×30mm×10mm. 2.3 激光技术参数 用于实验的技术参数如下: 的最大输出功率:2KW);焦点直径:3mm;扫描速率:14.3mm/s;熔覆功率:1800W(CO 2 层厚度:0.5mm;保护气体:氩气.
生化处理的恒温恒湿控制系统设计 2007年第11期(总第108期) 宋奇光,伍宗富,梅彬运(湖南文理学院,湖南常德415000 ) 【摘要】以PLC为控制器,结合温度传感变送器、LED显示器等,组成 一个生化处理的恒温恒湿控制系统。使用温度传感变送器获得温度的感应电压, 经处理后送给PLC。PLC将给定的温度与测量温度的相比较,得出偏差量,然后 根据模糊控制算法得出控制量。执行器由开关频率较高的固态继电器开关担任, 采用PWM控制方法,改变同一个周期中电子开关的闭合时间。从而调节高温电 磁阀开关的导通时间,达到蒸汽控制目的。 【关键词】生化处理;PLC;恒温恒湿 引言 生化处理系统是食品工艺的关键设备。在此以米粉生产工艺中的生化处理系统的蒸汽温湿度控制进行实用设计,其温度控制在0~100℃,误差为±0.5℃,可用键盘输入设置温度及LED实时显示系统温度,采用模糊算法进行恒温控制,将数字处理控制方法运用到温度控制系统中,可以克服温度控制系统中存在的严重的滞后现象,可以很大程度的提高控制效果和控制精度[1]。 1米粉生化处理的恒温恒湿系统现状与分析 1.1 现状 由于国内米粉生产设备厂家尚未掌握米粉的关键技术,使其制造的设备无法满足米粉生产的工艺要求。我们经过现场堪察,发现原有的连续式米粉生化处理恒温恒湿控制系统具有如下现状。 一是连续式米粉生化处理恒温恒湿箱的控制基本上是手动调节; 二是箱内各部位温度分布不均匀,实际温度波动太大(40-70℃),远远达不到生产要求(62.5℃±2.5℃),影响米粉的抗老化效果; 三是实际湿度也达不到生产要求,容易出现湿度偏高(米粉发泡)或者偏低(米粉起壳)的现象,严重影响米粉生产质量; 四是上层辅助加热管道分布不合理,容易使散落米粉焦化,影响产品质量。
1引言 1.1 课题的研究背景及意义 振动测试近十多年来发展非常迅速,受到了国内外专家和工业、农业、国防各部门科技工作者的重视。近代工程技术的飞跃发展,特别是航空航天、海洋工程、电力、化工等技术的发展,必须对振动进行预测、采集、并实时处理在运行过程中的载荷数据的响应数据,对大型结构系统进行振动和噪声分析,对可能产生的过大振动事先加以避免或进行控制以确保安全、经济合理。因此,振动测试包括振动、冲击、波动、噪声和各种动态技术(包括试验技术、测试分析技术、计算技术、信号和信息处理技术、自动控制技术、检测和故障诊断技术以及试验设备和材料动力性能等方面)的研究,已越来越在国民经济中发挥重要作用[1]。 振动测量的意义主要有以下两个方面: (1)预防事故、保证人身和设备的安全。预防事故,保证人身和设备的安全是开展设备诊断工作的直接目的和基本任务之一。我们知道,一些设备,特别是流程大型设备一旦发生故障将会引起链锁反应,造成巨大的经济损失,甚至灾难性的后果。因此,为了避免设备事故,保障人身和设备的安全,应当积极发展设备振动诊断。 (2)提高经济效益:开展设备诊断所带来的经济效益包括减少可能发生的事故损失和延长检修周期所节约的维修费用,国外一些调查资料显示,开展设备诊断可带来可观的经济效益。英国曾对2000个工厂作过调查,结果表明,采用设备诊断技术后维修费用每年节约3亿英镑,除去诊断技术的费用0.5亿英镑,净获利2.5亿英镑。在我国的大型电厂,若出现故障其停机一天造成的损失就达一百多万元。因此对设备故障进行有效的诊断有着明显的经济效益。 随着电子技术和计算机技术的快速发展,微型计算机技术,尤其是微控制器(单片机)的发展极为迅速,其应用越来越广。单片机主要应用于控制领域,用以实现各种测试和控制功能。目前,单片机还广泛应用于工业测控、计算机外围设备、工业智能化仪表、生产过程的自动控制、军事和航空航天等领域。 AT89C51是美国ATMEL公司生产的低电压,高性能CMOS8位单片机,片
《机械设计基础》 一、选择题: 1.我国标准规定,渐开线标准直齿圆柱齿轮分度圆上的压力角应为 ()度。 a)20 b)30 c)60 d)90 2. 渐开线标准直齿圆柱齿轮(正常齿)的齿顶高系数为(),顶隙系 数为()。 a)1,0.1 b)1,0.2 c) 1.2,0.2 d)1,0.25 3. 渐开线直齿圆柱齿轮的正确啮合条件是() a)模数相等 b)压力角相等 c)模数和压力角分别相等且为标准值 d)a,b,c都 不对 4.用齿条形刀具加工标准直齿圆柱齿轮,当压力角为20°,齿顶系数为 1时,不根切的最少齿数是多少?() a) 15 b)16 c) 17 d)18 5.平面机构自由度的计算公式为()。 a)3n-2P L-P H b)3n- P L- P H c)2n- P L -P H d)n- P L- P H 6. 构件是机构的基本()单元。 a)运动b)制造c)联结d)a)b)c)都不对 7.平面四杆机构的压力角和传动角的关系为()。 a)互为余角 b)互为补角 c)a,b都可能 d)a,b都不可能 8. 带传动的最大应力发生在()。 a)紧边与小轮的切点 b)紧边 c)松边 d)松边与小轮的切点 9.V带的截面形状为()。 a)V形 b)梯形 c)圆形 d)矩形 10.用范成法切制齿轮时,只要两齿轮(),就可以用同一把滚刀。 a) 模数相等b)压力角相等c)模数和压力角分别相等d)齿数相等 二、填空题: 1.闭式硬齿面齿轮传动常按强度设计,然后校核 强度。
2.预紧后受轴向变载荷的螺纹联接,为提高联接的疲劳强度,应尽量减小的刚度,以及提高的高度。 3.增加蜗杆头数,可以传动效率,但蜗杆头数过多,将会给带来困难。 4.直齿圆锥齿轮传动的强度计算方法是以的当量圆柱齿轮为计算基础的。 5.阿基米德蜗杆与蜗轮正确啮合的条件是。 6._______是机器与机构的统称。 7.包角是指带与带轮接触弧所对的圆心角。对于平带传动,一般要求包角 α≥________;对于V带传动,一般要求包角α≥________。 8.凸轮基圆半径是从到的最短距离。 9.凸轮机构从动件的两种常用运动规律中,________________运动有刚性 冲击,这是因为其____________有突变,________________运动有柔性冲击,这是因为其____________有突变。 三、简答题:本大题共4题,每题6分,共24分。 1.影响带传动中摩擦力大小的主要因素是什么? 2.试给出三种平面连杆机构演化的方法。 3.简述配合螺栓联接(绞制孔用)传递横向载荷的工作原理? 4.零件和构件的区别是什么? 、计算题:本大题共3个小题,共26分 2.图示铰链四杆机构,试问:当以杆AD为机架时,称为何种机构?(8分)
中北大学 信息商务学院 课程设计说明书 学生姓名:孟建龙学号:12020145X16系:机械工程系 专业:机械设计制造及其自动化 题目:工艺课程设计 ——后钢板弹簧吊耳的工艺规程及夹具设计 指导教师:赵丽琴职称:副教授 王彪职称:教授 2016年1月8日
中北大学 信息商务学院 课程设计任务书 2015/2016学年第1学期 所在系:机械工程系 专业:机械设计制造及其自动化 学生姓名:孟建龙学号:12020145X16课程设计题目:工艺课程设计 ——后钢板弹簧吊耳零件的工艺规程及夹具设计 起迄日期:2015年12月28日~2016年1月10日课程设计地点:中北大学信息商务学院 指导教师:赵丽琴、王彪 系主任:暴建岗 下达任务书日期:2015年12月28日
课程设计任务书 1.设计目的: (1)培养学生运用机械制造工艺学及有关课程(工程材料与热处理;机械设计、互换性与技术测量、金属切削机床、金属切削原理与刀具等)的知识,结合生产实习中学到的实践知识,独立地分析和解决工艺问题,初步具备设计一个中等复杂程度零件的工艺规程的能力。 (2)能根据被加工零件的技术要求,运用夹具设计的基本原理和方法,学会拟订夹具设计方案,完成夹具结构设计,提高结构设计能力。 (3)培养学生熟悉并运用有关手册、规范、图表等技术资料的能力。 (4)进一步培养学生识图、制图、运算和编写技术文件等基本技能。 2.设计内容和要求(包括原始数据、技术参数、条件、设计要求等):本次设计要求编制一个中等复杂程度零件(不少于10道工序,见附图)的机械加工工艺规程,并设计其中一道工序的专用夹具,绘制相关图纸,撰写设计说明书。必须以负责的态度对待自己所作的技术决定、数据和计算结果。注意理论与实践的结合,以期使整个设计在技术上是先进的,在经济上是合理的,在生产上是可行的。 具体内容如下: (1)根据零件图,确定生产类型(一般为中批或大批生产),对零件进行工艺分析。 (2)选择毛坯种类及制造方法,绘制毛坯图。 (3)拟订零件的机械加工工艺过程,选择各工序加工设备及工艺装备(刀具、夹具、量具、辅具),确定各工序切削用量及工序尺寸,计算某一代表工序的工时定额。 (4)填写工艺文件:工艺过程卡片、工序卡片。 (5)设计指定工序的专用夹具,绘制装配图1张。 (6)撰写设计说明书。 3.设计工作任务及工作量的要求〔包括课程设计计算说明书(论文)、图纸、实物样品等〕: 1.制定零件在中批生产条件下的机械加工工艺规程,画零件图,毛坯图,填写工艺过程卡、工序卡。 2.专用夹具设计。设计某道工序的专用夹具。 3.撰写课程设计说明书一份(A4纸)。
中北大学 毕业论文开题报告 学生姓名:张三学号:11091S101 学院:经济与管理学院 专业:工商管理 论文题目: 指导教师: 2015年11月 15日
开题报告填写要求 1.开题报告作为毕业论文答辩委员会对学生答辩资格审查的依据材料之一。此报告应在指导教师指导下,由学生在毕业论文工作前期内完成,经指导教师审查后生效; 2.开题报告内容必须用按教务处统一设计的电子文档标准格式(可从教务处网页上下载)打印,禁止打印在其它纸上后剪贴,完成后应及时交给指导教师签署意见; 3.学生写文献综述的参考文献一般应不少于10篇(不包括辞典、手册)。文中应用参考文献处应标出文献序号,文后“参考文献”的书写,应按照国标GB 7714—87《文后参考文献著录规则》的要求书写,不能有随意性; 4.学生的“学号”要写全号(如020*******,为10位数),不能只写最后2位或1位数字; 5. 有关年月日等日期的填写,应当按照国标GB/T 7408—94《数据元和交换格式、信息交换、日期和时间表示法》规定的要求,一律用阿拉伯数字书写。如“2004年3月15日”或“2004-03-15”; 6. 指导教师意见用黑墨水笔工整书写,不得随便涂改或潦草书写。
毕业论文开题报告 1.选题依据: ××××××××(小4号宋体,1.5倍行距)×××××××××××××××××××××××××××××××××××××××××××××××××××× ××××××××××××××…………。 紧紧围绕毕业论文选题,按照导师的要求完成,主要阐明该项研究的目的和范围,,本研究课题范围内国内外己有文献的综述,以及该项研究工作的实用价值或理论意义,论文内容安排等。
目录 1.原理电路的设计 (1) 1.1总体方案设计 (1) 1.1.1简单原理叙述 (1) 1.1.2设计方案选择 (1) 1.2单元电路的设计 (3) 1.2.1温度信号的采集与转化单元——温度传感器 (3) 1.2.2电压信号的处理单元——运算放大器 (4) 1.2.3电压表征温度单元 (5) 1.2.4电压控制单元——迟滞比较器 (6) 1.2.5驱动单元——继电器 (7) 1.2.6 制冷部分——Tec半导体制冷片 (8) 1.3完整电路图 (10) 2.仿真结果分析 (11) 3 实物展示 (13) 3.1 实物焊接效果图 (13) 3.2 实物性能测试数据 (14) 3.2.1制冷测试 (14) 3.2.2制热测试 (18) 3.3.3性能测试数据分析 (20) 4总结、收获与体会 (21) 附录一元件清单 (22) 附录二参考文献. (23)
摘要 本课程设计以温度传感器LM35、运算放大器UA741、NE5532P及电压比较器LM339N 为电路系统的主要组成元件,扩展适当的接口电路,制作一个温度控制系统,通过室温的变化和改变设定的温度,来改变电压传感器上两个输入端电压的大小,通过三极管开关电路控制继电器的通断,来控制Tec制冷片的工作。这样循环往复执行这样一个周期性的动作,从而把温度控制在一定范围内。学会查询文献资料,撰写论文的方法,并提交课程设计报告和实验成品。 关键词:温度;测量;控制。
Abstract This course is designed to a temperature sensor LM35, an operational amplifier UA741, NE5532P and a voltage comparator LM339N circuit system of the main components. Extending the appropriate interface circuit, make a temperature control system. By changing the temperature changes and set the temperature to change the size of the two input ends of the voltage on the voltage sensor, an audion tube switch circuit to control the on-off relay to control Tec cooling piece work. This cycle of performing such a periodic motion, thus controlling the temperature in a certain range. Learn to query the literature, writing papers, and submitted to the curriculum design report and experimental products. Key words: temperature ; measure ;control
毕业设计说明书 英文文献及中文翻译 学生姓名:学号南社区0906064109 学院:电子与计算机科学技术学院 专业:网络工程 指导教师: 刘爽英 2018年6月 An Overview of Servlet and JSP Technology Gildas Avoi ne and Philippe Oechsli n EPFL, Lausa nne, Switzerla nd 1.1A Servlet's Job Servlets are Java programs that run on Web or application servers, acting as a middle layer betwee n requests coming from Web browsers or other HTTP clie nts and databases or applicatio ns on the HTTP server. Their job is to perform the followi ng tasks, as illustrated in Figure 1-1b5E2RGbCAP Web Server (Servlets JSP) Figure 1-1 1.Read the explicit data sent by the client. Database Legacy Application Java Application Web Service Client (End User)
The end user normally enters this data in an HTML form on a Web page. However, the data could also come from an applet or a custom HTTP clie nt program EanqFDPw 2.Read the implicit HTTP request data sent by the browser X DiTa9E3d Figure 1-1 shows a single arrow going from the client to the Web server (the layer where servlets and JSP execute〉, but there are really two varieties of data: the explicit data that the end user en ters in a form and the behi nd-the-sce nes HTTP in formati on. Both varieties are critical. The HTTP information includes cookies, information about media types and compressi on schemes the browser un dersta nds, and sc RTCTpUDGiT 3.Gen erate the results. This process may require talking to a database,executing an RMI or EJB call, invoking a Web service, or computing the response directly. Your real data may be in a relati onal database. Fine. But your database probably does n't speak HTTP or retur n results in HTML, so the Web browser can't talk directly to the database.Even if it could, for security reasons, you probably would not want it to. The same argument applies to most other applications. You need the Web middle layer to extract the incoming data from the HTTP stream, talk to the application, and embed the results in side a docume nt5PCzVD7HxA 4.Send the explicit data (i.e., the document> to the client-BHrnAiLg This document can be sent in a variety of formats, including text (HTML or XML>, bi nary (GIF images>, or eve n a compressed format like gzip that is layered on top of some other un derly ing format. But, HTML is by far the most com mon format, so an importa nt servlet/JSP task is to wrap the results in side of HTML H AQX74J0X 5.Send the implicit HTTP response data. Figure 1-1 shows a single arrow going from the Web middle layer (the servlet or JSP page> to the clie nt. But, there are really two varieties of data sent: the docume nt itself and the behind-the-scenes HTTP information. Again, both varieties are critical to effective developme nt. Sending HTTP resp onse data invo Ives telli ng the browser or other clie nt what type of docume nt is being retur ned (e.g., HTML>, sett ing cookies and cach ing parameters, and other such task LD AYtR y KfE
目录 第一章系统描述与仿真目的 (2) 第二章系统分析 (2) 第三章数据统计 (4) 第四章数据分析 (6) 第五章建模与仿真 (11) 第六章输出分析 (16) 第七章心得体会 (18) 第八章参考文献 (18)
一、系统描述与仿真目的 1、系统描述 所选系统为大三学生早起签到系统,虽然早上签到对于大三学生是痛苦的噩梦,但是也提供了系统建模与仿真最普遍的课题。该处有负责签到的工作人员一名。学生到楼底下后,若签到处无人,则学生立刻开始签到,若签到处繁忙,则学生需排队等待签到,签完之后才能回宿舍。该系统为一单服务台服务系统,在系统中,学生的到达是随机的,每两个学生到达的时间间隔时间是不一样的,学生签到的时间也是不一样的,由此组成的队列长度也是随机的。 该排队系统的基本结构是: 2、仿真目的 1)了解排队系统的设计; 2)通过仿真分析,掌握witness软件的操作; 3)通过仿真分析,研究签到处的排队系统,提高系统的运行效率; 4)了解建模与仿真在系统分析中的重要作用。 二、系统分析 1、分析系统的实体、事件、状态、活动 (1)实体: 临时实体:学生 永久实体:签到志愿者 特殊实体:队列 (2)事件: 学生到达、学生结束排队、学生签到完毕回宿舍 (3)状态:
签到志愿者:忙、闲 学生: 等待签到、签到 队列: 队列长度 (4)活动: 排队、签到 (5)排队规则: 先到的先签到,后来的排在后面,依次签到。 2、以学生流动为主线,画出流程图
三、数据统计 通过对签到周三早上进行调查,得到一定时间段内的学生到达间隔时间和签到时间如下表: 表中时间单位均为秒(s) 学生数到达时间间隔签到 时间 到达时 刻 开始时 间 结束时 间 排队时 间 1 - 6 0 0 6 0 2 0 1 0 6 7 6 3 2 4 2 7 11 5 4 4 2 6 11 13 5 5 2 5 8 13 18 5 6 0 1 8 18 19 10 7 8 2 16 19 21 3 8 9 6 25 25 31 0 9 5 5 30 31 36 1 10 4 7 34 36 43 2 11 5 1 39 43 44 4 12 9 3 48 48 51 0 13 5 2 53 53 55 0 14 9 2 62 62 64 0 15 4 4 66 66 70 0 16 5 5 71 71 76 0 17 8 6 79 79 85 0 18 5 4 84 85 89 1 19 7 1 91 91 92 0
温度控制系统设计 目录 第一章系统方案论证错误!未指定书签。 总体方案设计错误!未指定书签。 温度传感系统错误!未指定书签。 温度控制系统及系统电源错误!未指定书签。 单片机处理系统(包括数字部分)及温控箱设计错误!未指定书签。 算法原理错误!未指定书签。 第二章重要电路设计错误!未指定书签。 温度采集错误!未指定书签。 温度控制错误!未指定书签。 第三章软件流程错误!未指定书签。 基本控制错误!未指定书签。 控制错误!未指定书签。 时间最优的控制流程图错误!未指定书签。 第四章系统功能及使用方法错误!未指定书签。 温度控制系统的功能错误!未指定书签。 温度控制系统的使用方法错误!未指定书签。 第五章系统测试及结果分析错误!未指定书签。 硬件测试错误!未指定书签。 软件调试错误!未指定书签。 第六章进一步讨论错误!未指定书签。 参考文献错误!未指定书签。 致谢错误!未指定书签。 摘要:本文介绍了以单片机为核心的温度控制器的设计,文章结合课题《温度控制系统》,从硬件和软件设计两方面做了较为详尽的阐述。 关键词:温度控制系统控制单片机 : . : 引言: 温度控制是工业生产过程中经常遇到的过程控制,有些工艺过程对其温度的控制效果直接影响着产品的质量,因而设计一种较为理想的温度控制系统是非常有价值的。本文设计了以单片机为检测控制中心的温度控制系统。温度控制采用改进的数字控制算法,显示采用静态显示。该系统设计结构简单,按要求有以下功能: ()温度控制范围为°; ()有加热和制冷两种功能 ()指标要求: 超调量小于°;过渡时间小于;静差小于℃;温控精度℃ ()实时显示当前温度值,设定温度值,二者差值和控制量的值。 第一章系统方案论证 总体方案设计 薄膜铂电阻将温度转换成电压,经温度采集电路放大、滤波后,送转换器采样、量化,量化后的数据送单片机做进一步处理;