
习题解答(供参考)
习题二
2.2 系统的调速范围是1000~100min r ,要求静差率s=2%,那么系统允许的静差转速降是多少? 解:10000.02(100.98) 2.04(1)
n n s
n rpm D s ?=
=??=-
系统允许的静态速降为2.04rpm 。
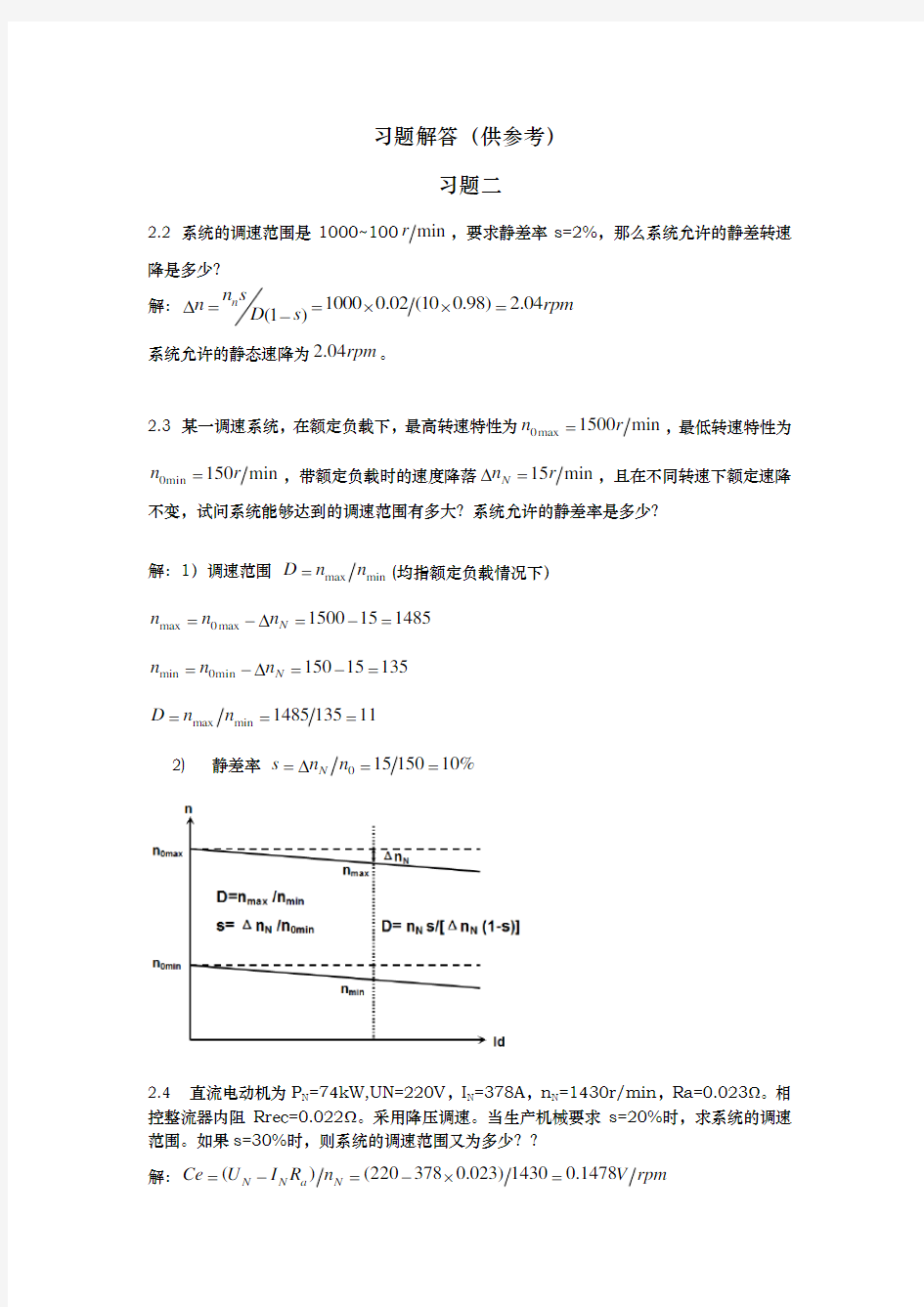
2.3 某一调速系统,在额定负载下,最高转速特性为0max 1500min n r =,最低转速特性为
0min 150min n r =,带额定负载时的速度降落15min N n r ?=,且在不同转速下额定速降
不变,试问系统能够达到的调速范围有多大?系统允许的静差率是多少?
解:1)调速范围 max min D n n =(均指额定负载情况下)
max 0max 1500151485N n n n =-?=-= min 0min 15015135N n n n =-?=-= max min 148513511D n n ===
2) 静差率 01515010%N s n n =?==
2.4 直流电动机为P N =74kW,UN=220V ,I N =378A ,n N =1430r/min ,Ra=0.023Ω。相控整流器内阻Rrec=0.022Ω。采用降压调速。当生产机械要求s=20%时,求系统的调速范围。如果s=30%时,则系统的调速范围又为多少??
解:()(2203780.023)14300.1478N N a N Ce U I R n V rpm =-=-?=
378(0.0230.022)0.1478115N n I R rpm ?==?+= (1)]14300.2[115(10.2)] 3.1N D n S n s =?-=??-= [(1)]14300.3[115(10.3)] 5.33N D n S n s =?-=??-=
2.5 某龙门刨床工作台采用
V-M
调速系统。已知直流电动机
60,220,305,1000min N N N N P kW U V I A n r ====,主电路总电阻R=0.18
Ω,Ce=0.2V ?min/r,求:
(1)当电流连续时,在额定负载下的转速降落N n ?为多少? (2)开环系统机械特性连续段在额定转速时的静差率N S 多少?
(3)若要满足D=20,s ≤5%的要求,额定负载下的转速降落N n ?又为多少? 解:(1)3050.180.2274.5/min N N n I R r ?=?=?= (2) 0274.5(1000274.5)21.5%N N S n n =?=+=
(3) (1)]10000.050.95] 2.63/min N n n S D s r ?=-=??=
2.6 有一晶闸管稳压电源,其稳态结构图如图所示,已知给定电压*
8.8u U V =、比例调节器
放大系数2P K =、晶闸管装置放大系数15S K =、反馈系数γ=0.7。求:(1)输出电压d U ;(2)若把反馈线断开,d U 为何值?开环时的输出电压是闭环是的多少倍?(3)若把反馈
系数减至γ=0.35,当保持同样的输出电压时,给定电压*u U 应为多少?
解:(1)*
(1)2158.8(12150.7)12d p s u p s U K K U K K V γ=+=??+??= (2) 8.8215264d U V =??=,开环输出电压是闭环的22倍
(3) *
(1)12(12150.35)(215) 4.6u d p s p s U U K K K K V γ=+=?+???=
2.7 某闭环调速系统的调速范围是1500r/min~150r/min ,要求系统的静差率5%s ≤,那么系统允许的静态速降是多少?如果开环系统的静态速降是100r/min ,则闭环系统的开环放大倍数应有多大?
解: 1)()s n s n D N N -?=1/
1015002%/98%N n =???
15002%/98%10 3.06/min N n r ?=??=
2)()
7.31106.3/1001/=-=-??=cl op n n K
2.8 某闭环调速系统的开环放大倍数为15时,额定负载下电动机的速降为8 r/min ,如果将开环放大倍数提高到30,它的速降为多少?在同样静差率要求下,调速范围可以扩大多少倍?
解: ()()12881511=?+=?+=?cl op n K n
如果将开环放大倍数提高到30, 则速降为:
()()rpm K n n op cl 13.4301/1281/=+=+?=?
在同样静差率要求下,D 可以扩大937.1/21=??cl cl n n 倍
2.9 有一V-M 调速系统:电动机参数P N =2.2kW, U N =220V, I N =12.5A, n N =1500 r/min ,电枢电阻R a =1.5Ω,电枢回路电抗器电阻RL=0.8Ω,整流装置内阻R rec =1.0Ω,触发整流环节的放大倍数K s =35。要求系统满足调速范围D=20,静差率S<=10%。
(1)计算开环系统的静态速降Δn op 和调速要求所允许的闭环静态速降Δn cl 。 (2)采用转速负反馈组成闭环系统,试画出系统的原理图和静态结构图。
(3)调整该系统参数,使当U n *=15V 时,I d =I N ,n=n N ,则转速负反馈系数 α应该是多少?
(4)计算放大器所需的放大倍数。 解:(1)
()()/22012.5 1.5/1500201.25/15000.134min/N N a e
e n U I R C C V r
=-??=-?==
()//12.5 3.3/0.134307.836/min
N N e
op N e n U I R C n I R C r ∑∑=-???=?=?=
()()/1150010%/20*90%8.33/min N N n n s D s r ?=-=?=() 所以,min /33.8r n cl =? (2)
(3)(4)()()()()[]
()()[]K C R I K KU K C R I U K K n e d n e d n s p +-+=+-=*
*
1/1/1/α
()/1307.836/8.33135.955op cl K n n =??-=-=
()()()150035.95515/135.95512.5 3.3/0.134135.955α??=??+?-?+????
r V min/0096.0=?α
可以求得,*35.955*0.134
14.34*35*0.0096
e p s K C K K α=
== 也可以用粗略算法:
n U U n n
α=≈*
,01.01500
15
*===n U n α /p e s K KC K α=,()35.9550.134/350.0113.76p K =??=
2.10 在题2.9的转速负反馈系统中增设电流截止环节,要求堵转电流N dbl I I 2≤,临界截止电流N dcr I I 2.1≥,应该选用多大的比较电压和电流反馈采样电阻?要求电流反馈采样电阻不超过主电路总电阻的1/3 ,如果做不到,需要增加电流反馈放大器,试画出系统的原理
图和静态结构图,并计算电流反馈放大系数。这时电流反馈采样电阻和比较电压各为多少? 解:(1) A I I N dbl 252=≤,A I I N dcr 152.1=≥
s com s com dcr R U R U I /15/=?=
()
()Ω
=?+=?+≈5.1/1525/*
s s com s com n dbl R R U R U U I ,
V U com 5.225.115=?=
(2)
()(/3) 1.0 1.50.8/3 1.1,(/3)
1.1,
s s R R R R ∑∑=++=Ω>=Ω不符合要求,取需加电流反馈放大器
由于需要的检测电阻值大,说明要求的电流信号值也大。要同时满足检测电阻小和电流
信号大的要求,则必须采用放大器,对电流信号进行放大。为此, 取 1.1s R =Ω,则15 1.116.5com dcr s U I R V =?=?=
(3) 当dcr d I I >时,有
()[
]()()[
]
()[]()
()()[
](
)()()
[]
K C I R K K K R K C U K U K K K C RI K C U I R K K K K C U K K n e d s i s p e com i n s p e d e com d s i s p e n s p ++-++=+-+--+=1/1/1/1/1/**
当n=0时,
()()()**//dbl p s n i com p s i s n i com i s I K K U K U R K K K R U K U K R =++≈+
()()251516.5/1.115/22.513.5 1.36i i i K K K =+?=-=
2.11在题 2.9的系统中,若主电路电感L=50mH ,系统运动部分的飞轮惯量
22GD =1.6Nm ,整流装置采用三相零式电路,试判断按题2-9要求设计的转速负反馈系统
能否稳定运行?如要保证系统稳定运行,允许的最大开环放大系数是多少?
解: mH L 50=,2
26.1Nm GD =, 3.3R ∑=Ω,0.134/e
C V rpm =
()()2/0.05/3.30.015/375 1.6 3.3/3750.1340.13430/3.145.28/64.330.0820.00333l m e m s T L R s
T GD R C C s T s
∑∑=====????===
()()22
2
/0.0820.0150.003330.00333/0.0151*0.003330.00150.00333/0.0000498330.52
l m l s s s K T T T T T T ????<++=?++??????=+=??(
)
可见与前面的K>35.955相矛盾,故系统不稳定。要使系统能够稳定运行,K 最大为30.52。 2.12 有一个晶闸-电动机调速系统,已知:电动机:kW P N 8.2=,V U N 220=,A I N 6.15=,1500=N n r/min ,a R =1.5Ω,整流装置内阻rec R =1Ω, 电枢回路电抗器电阻L R =0.8Ω, 触发整流环节的放大倍数35=s K 。
(1)系统开环工作时,试计算调速范围30=D 时的静差率s 值。 (2)当30=D ,%10=s 时,计算系统允许的稳态速降。
(3)如组成转速负反馈有静差调速系统,要求30=D ,%10=s ,在V U n 10*
=时N d I I =,
N n n =,计算转速负反馈系数α和放大器放大系数p K 。
解:
()r V C e m in/1311.01500/5.16.15220=?-=
(1)
()min 0min /15.6 3.3/0.1311392.68/min 1500/3050
/392.68/392.685088.7%
op N e op n I R C r n s n n ∑?=?=?====??=+=
(2)
()min
/56.59.0/550/1.0r n n n ==?+??=
(3)
()()??
??
?=+-+=∑e s p e d e n s p C K K K K C I R K C U K K n /1/1/*α ()()()()
()??
??
?=-=-??=+-+=∑5.52156.5/48.2971/1/6.151/1500*cl op e e n s p n n K K C R K C U K K 2.13旋转编码器光栅数1024,倍频系数4,高频时钟脉冲频率MHz 1f 0=,旋转编码器输出的脉冲个数和高频时钟脉冲个数均采用16位计数器,M 法测速时间为0.01s ,求转速
min /r 1500n =和min /r 150n =时的测速分辨率和误差率最大值。
解:
(1)M 法:分辨率min /465.101
.0410246060r ZT Q c =??==
最大误差率:→=
c
ZT M n 1
60 min /1500r n =时,102460
01
.0102441500601=???==
c nZT M min /150r n =时,4.10260
01.010*********=???==
c nZT M
min /1500r 时,%098.0%1001024
1%1001%1max =?=?=
M δ min /150r 时,%98.0%1004
.1021%1001%1max =?=?=
M δ 可见M 法适合高速。
(2)T 法: 分辨率:
min /1500r n =时,min /17115004102510160150041024606
2
02r Zn f Zn Q =??-????=-= min /150r n =时,min /55.1150
4102410160150410246062
02r Zn f Zn Q =??-????=-=
最大误差率:2
60ZM f n =
,Zn f M 0260=,
当min /1500r n =时,77.915004102410606
2=???=
M 当min /150r n =时,7.97150
4102410606
2=???=
M min /1500r n =时,%4.11%1001
77.91
%10011%2max =?-=
?-=
M δ
min /150r n =时,%1%1001
7.971
%1001
1
%2max =?-=
?-=
M δ
可见T 法适合低速
习题三
3.1双闭环调速系统的ASR 和ACR 均为PI 调节器,设系统最大给定电压*
nm U =15V ,
N n =1500r/min ,N I =20A ,电流过载倍数为2,电枢回路总电阻R =2Ω,s K =20,
e C =0.127V ·min/r ,求:(1)当系统稳定运行在*
n U =5V ,dL I =10A 时,系统的n 、n U 、
*i U 、i U 和c U 各为多少?(2)当电动机负载过大而堵转时,*i U 和c U 各为多少?
解:(1)
*
**
**0*/15/15000.01/55,
5000.01/150.375/400.375*10 3.750.127*50010*2
4.17520500,5, 3.75,nm N n
n
im dm i d i d dL e N dL C s s s n i i c U n V rpm V rpm
U V
U V n rpm
V rpm
U V V A
I A
U I V U U E I R C n I R U V K K K n rpm U V U U V U αα
ββ=====
=
========+++=========当转速即
4.175v
=
(2)堵转时,V I U dm i 15*==β,
()040*2420
e d d dm c s s s C n I R U I R U V K K K +=====
3.2 在转速、电流双闭环调速系统中,两个调节器ASR ,ACR 均采用PI 调节器。已知参数:电动机:N P =3.7kW ,N U =220V ,N I =20A ,N n =1000 r/min ,电枢回路总电阻
R =1.5Ω,设cm im nm U U U ==*
* =8V ,电枢回路最大电流dm I =40A,电力电子变换器的放大系
数s K =40。试求:
(1)电流反馈系数β和转速反馈系数α。
(2)当电动机在最高转速发生堵转时的,0d U c i i U U U ,,*值。
解:1)*
*880.2/0.008/401000im nm dm N U V
U V V A V rpm I A
n rpm
βα=
=====
2) 040*1.560d dl e N dl U E I R C n I R A V ∑∑=+=+=Ω= 这时:
*8,0n n U V U ==,ASR 处于饱和,输出最大电流给定值。
*8,8,i i U V U V ==
06040 1.5C d S U U K V ===
3.3 在转速、电流双闭环调速系统中,调节器ASR ,ACR 均采用PI 调节器。当ASR 输出
达到*im U =8V 时,主电路电流达到最大电流80A 。当负载电流由40A 增加到70A 时,试
问:(1)*i U 应如何变化?(2)c U 应如何变化?(3)c U 值由哪些条件决定?
解: 1) *8
0.1/
80
im
dm
U V
V A
I A
β===
因此当电流从40A?70A时,*i U应从4V?7V变化。
2)
C
U要有所增加。
3)
C
U取决于电机速度和负载大小。因为
d dl
e N dl
U E I R C n I R
∑∑
=+=+
()
0e d
d
c
s s
C n I R
U
U
K K
+
==
3.5 某反馈控制系统已校正成典型I型系统。已知时间常数T=0.1s, 要求阶跃响应超调量σ≤10%。
(1)系统的开环增益。
(2)计算过渡过程时间
s
t和上升时间r t;
(3)绘出开环对数幅频特性。如果要求上升时间
r
t<0.25s, 则K=?,σ%=?
解:取0.69,0.6,%9.5%
KTξσ
===
(1)系统开环增益:0.69/0.69/0.1 6.9(1/)
K T s
===
(2)上升时间 3.30.33
r
t T S
==
过度过程时间:
3
660.10.6
s
n
t T s
ξω
≈==?=
(3)
如要求0.25
r
t s
<,查表3-1则应取1,0.5
KTξ
==, 2.4 2.4*0.10.24
r
t T s
===这时1/10
K T
==,超调量=16.3%。
3.6有一个系统,其控制对象的传递函数为1
01.010
1)(1+=+=
s s K s W obj τ,要求设计一个无静差系统,在阶跃输入下系统超调量σ%≤5%(按线性系统考虑)。试对系统进行动态校正,决定调节器结构,并选择其参数。 解:按典型I 型系统设计,选0.5,
0.707,
3-1% 4.3%KT ξσ===查表,得。
选I
调节器,
1
(),W s s τ=校正后系统的开环传递函数为
110
(),
T 0.01(0.011)
W s s s ττ=
+这样,=, K=10/,已选KT =0.5, 则K =0.5/T=50, 所以
10/10/500.2K S τ===,积分调节器:11()0.2W s s s
τ=
=。
3.7有一个闭环系统,其控制对象的传递函数为)
102.0(10
)1()(1+=
+=
s s Ts s K s W obj ,要求校正为典型Ⅱ型系统,在阶跃输入下系统超调量σ%≤30%(按线性系统考虑)。试决定调节器结构,并选择其参数。
解:应选择PI 调节器,1
(1)(1)(),()(1)
PI PI PI K s K s K W s W s s s s Ts ττττ++=
=+校正后系统的开环传递函数 ,对照典型Ⅱ型系统, 1/,
h 83-4PI K K K hT ττσ==,选=, 查表, %=27.2%,满足设计要
求。 这样8*0.020.16hT s τ===,
12222
181
175.78,/175.78*0.16/10 2.8122*8*0.02PI h K K K K h T τ++=
=====
3.8在一个由三相零式晶闸管整流装置供电的转速、电流双闭环调速系统中,已知电动机的额定数据为:60=N P kW , 220=N U V , 308=N I A , 1000=N n r/min , 电动势系数e C =0.196 V ·min/r , 主回路总电阻R =0.18Ω,触发整流环节的放大倍数s K =35。电磁时间常数l T =0.012s,机电时间常数m T =0.12s,电流反馈滤波时间常数i T 0=0.0025s,转速反馈滤波时间常数n T 0=0.015s 。额定转速时的给定电压(U n *)N =10V,调节器ASR ,ACR 饱和输出电压U im *=8V,U cm =6.5V 。
系统的静、动态指标为:稳态无静差,调速范围D=10,电流超调量i σ≤5% ,空载起动到额定转速时的转速超调量n σ≤10%。试求:
(1)确定电流反馈系数β(假设起动电流限制在1.1N I 以内)和转速反馈系数α。
(2)试设计电流调节器ACR,计算其参数R i, 、C i 、C Oi 。画出其电路图,调节器输入回路电阻R 0=40Ωk 。
(3)设计转速调节器ASR,计算其参数R n 、C n 、C On 。(R 0=40k Ω) (4)计算电动机带40%额定负载起动到最低转速时的转速超调量σn 。 (5)计算空载起动到额定转速的时间。
解:(1)*
/8/(1.1*)8/3390.0236/im dm N U I V I V A V A β====
10/10000.01min/V r α==
(2)电流调节器设计
确定时间常数:)0.00333s a T s =
)0.0025oi b T s =
0)0.00250.003330.00583i i s c T T T s ∑=+=+=
电流调节器结构确定:
因为5%i σ≤,可按典型I 型系统设计,选用PI 调节器,(1)
()i i ACR i K S W S S
ττ+=
,
电流调节器参数确定: 1
0.012,0.5,0.5/85.76i l I i I i T s K T K T s τ-∑∑=====选,
85.760.0120.18
0.224350.0173
I i i s K R K K τβ??=
==?。 校验等效条件:1
85.76ci I K s ω-==
1111
)1101.01330.00333)79.06)115.52ci
S ci
ci
a T
b S
c s ωωω--==>?==<===>电力电子装置传递函数的近似条件:忽略反电势的影响的近似条件:
可见满足近似等效条件,电流调节器的实现:选040R K =,则:
00.224408.96i i R K R K K ==?=, 取9K.
由此
33
000/0.012/(910) 1.334/40.0025/40100.25i i i i i C R F C T R F
τμμ==?===??=
(3)速度调节器设计
确定时间常数:
a) 电流环等效时间常数1/I K :因为0.5I i K T ∑=
则 1/220.005830.01166I i K T s ∑==?= b) 0.015on T s =
c) 1/0.011660.0150.02666n I on T K T s ∑=+=+= 速度调节器结构确定:
按照无静差的要求,应选用PI 调节器,
(1)
()n n ASR n K s W s s
ττ+=
, 速度调节器参数确定:
,5,0.1333n n n n hT h hT s ττ∑∑====取
2
222216
168.822250.02666
(1)60.02360.1960.12
6.94
2250.010.180.02666
N n e m n n h K s h T h C T K h RT βα-∑∑+===??+???=
==????校验等效条件:
11/168.820.133322.5cn N N n K K s ωωτ-===?=
11)40.43)25.2cn
cn
a s
b s ωω--==>==>
可见满足近似等效条件。
转速超调量的校验 (空载Z=0)
max *3080.180.02666
%2*(
)()281.2% 1.10.19610000.1211.23%10%
n N n b m T C n z C n T σλ∑???=-=?????=>
转速超调量的校验结果表明,上述设计不符合要求。因此需重新设计。
查表,应取小一些的h ,选h=3进行设计。
按h=3,速度调节器参数确定如下:0.07998n n hT s τ∑==
2222
(1)/24/(290.02666)312.656(1)/240.02360.1960.12/(230.010.180.02666)7.6
N n n e m n K h h T s
K h C T h RT βα-∑∑=+=??==+=???????=校验等效条件:11/312.6560.0799825cn N N n K K s ωωτ-===?=
1/21/211/2
1/2
1
)1/3(/)1/3(85.76/0.00583)40.43)1/3(/)
1/3(85.76/0.015)
25.2I i cn I on cn
a K T s
b K T s ωω-∑-==>==>
可见满足近似等效条件。 转速超调量的校验:
272.2% 1.1(3080.18/0.1961000)(0.02666/0.12)9.97%10%n σ=??????=<
转速超调量的校验结果表明,上述设计符合要求。
速度调节器的实现:选040R K =,则07.640304n n R K R K =?=?=,取310K 。
33
0/0.07998/310100.2584/40.015/4010 1.5n n n on on C R F C T R F
τμμ==?===??=
4) 40%额定负载起动到最低转速时:
%272.2%(1.10.4)(3080.18/0.196100)(0.02666/0.12)63.5%n σ=??-????=
5) 空载起动到额定转速的时间是:(书上无此公式)
仅考虑起动过程的第二阶段。
222()(),
()375375375m dm dL dm dL e L dm dL
e m
e
m e
GD dn
dn C I I R I I R T T I I GD GD R dt
dt C T C C C --=-===-根据电机运动方程:所以:*0.196*0.12*1000
0.385()(1.1*3080)*0.18
e m dm dL C T n t s I I R ===--
3.10 有一转速、电流双闭环调速系统,主电路采用三相桥式整流电路。已知电动机参数为:P N =500kW ,U N =750V ,I N =760A ,n N =375 r/min ,电动势系数C e =1.82V ·min/r, 电枢回路总电阻R=0.14Ω,允许电流过载倍数λ=1.5,触发整流环节的放大倍数K s =75,电磁时间常数l T =0.031s,机电时间常数m T =0.112s,电流反馈滤波时间常数i T 0=0.002s,转速反馈滤波时间常数n T 0=0.02s 。设调节器输入输出电压U nm *=U im *= U nm =10V,调节器输入电
阻R 0=40k Ω。
设计指标:稳态无静差,电流超调量i σ≤5%,空载起动到额定转速时的转速超调量n σ≤10%。电流调节器已按典型I 型系统设计,并取参数KT=0.5。 (1)选择转速调节器结构,并计算其参数。
(2)计算电流环的截止频率ci ω和转速环的截止频率cn ω,并考虑它们是否合理?
解:(1)
**100.00877/1.5*760
10
0.0267min/375
im dm nm
N U V A
I U V r n βα====
==
电流调节器已按典型I 型系统设计如下: 确定时间常数:)0.00176)0.002)0.00367S oi i a T s
b T s
c T s
∑===
电流调节器结构确定:因为σ%≤5%,可按典型I 型系统设计,选用PI 调节器, W ACR (s)=K i (τi s+1)/τi s , T l /T ∑i =0.031/0.00367=8.25<10
电流调节器参数确定:τi =T l =0.031s , K I T ∑i = 0.5, K I = 0.5/T ∑i =136.24 s -1
/136.240.0310.14/750.008770.899i I I s K K T R K β==???=
校验等效条件:ωci =K I =136.24 s -1
11/21/211/21/21)1/31/30.00167199.6)(1/)3(1/0.1120.031)50.9)1/3(1/)1/3(1/0.001670.002)182.39s ci
m l ci
s oi ci
a T s
b T T s
c T T s ωωω---=?=>=?=<=?=>
可见满足近似等效条件。
电流调节器的实现:选R 0=40K ,则
00.8994035.96i i R K R =?=?= 取36K
33
000/0.031/36100.864/40.002/40100.2i i i i i C T R F C T R f
μμ==?===??=
速度调节器设计 确定时间常数:
a) 电流环等效时间常数1/K I :因为K I T ∑i = 0.5 则1/K I =2T ∑i =2*0.00367=0.00734s b) b)T on =0.02s
c) c)T ∑n =1/K I +T on =0.00734+0.02=0.02734s 速度调节器结构确定:
按照无静差的要求,应选用PI 调节器, W ASR (s)=K n (τn s+1)/τn s 速度调节器参数确定:
τn=hT∑n,选h=5,则τn=hT∑n=0.1367s,
K N=(h+1)/(2h2T2∑n)=6/2*25*0.027342=160.54 s-2
K n=(h+1)βC e T m/(2hαRT∑n)= 6*0.00877*1.82*0.112/2*5*0.0267*0.14*0.02734=10.5
校验等效条件:ωcn=K N/ω1=K Nτn=160.54*0.1367 =21.946 s-2
a) 1/3(K I/T∑i)1/2=1/3(136.24/0.00367)1/2=64.22s-1>ωcn
b) 1/3(K I/T on)1/2=1/3(136.24/0.02)1/2=27.51s-1>ωcn
可见满足近似等效条件。
速度调节器的实现:选R0=40K,则R n=K n*R0=10.5*40=420K
由此C n=τn/R n=0.1367/420*103=0.325μF 取0.33μF C0n=4T0n/R0=4*0.02/40*103=2μF
2) 电流环的截止频率是:ωci=K I=136.24 s-1
速度环的截止频率是:ωcn=21.946 s-2
从电流环和速度环的截止频率可以看出,电流环比速度环要快,在保证每个环都稳定的情况下,再求系统的快速性,充分体现了多环控制系统的设计特点。
3.11 在一个转速、电流双闭环V-M系统中,转速调节器ASR,电流调节器ACR均采用PI调节器。
(1)在此系统中,当转速给定信号最大值U nm*=15V时,n=n N=1500 r/min;电流给定信号最大值U im*=10V时,允许最大电流I dm=30A,电枢回路总电阻R=2Ω,晶闸管装置的放大倍数K s=30 ,电动机额定电流I N =20A ,电动势系数C e =0.128V·min/r。现系统在U n*=5V ,I dl=20A时稳定运行。求此时的稳态转速n=? ACR的输出电压U c =?
(2)当系统在上述情况下运行时,电动机突然失磁( =0) , 系统将会发生什么现象? 试分析并说明之。若系统能够稳定下来,则稳定后n=? U n=? U i*=? U i=? I d=? U c =? (3)该系统转速环按典型Ⅱ型系统设计, 且按M rmin准则选择参数,取中频宽h=5, 已知转速环小时间常数T∑n =0.05s ,求转速环在跟随给定作用下的开环传递函数,并计算出放大系数及各时间常数。
(4)该系统由空载(dL I =0)突加额定负载时,电流d I 和转速n 的动态过程波形是怎样的?已知机电时间常数m T =0.05s,计算其最大动态速降max n ?和恢复时间v t 。
1) α= U*nm /n N =15/1500=0.01 Vmin/r β= U*im /I dm = 10/30=0.33 V/A
U*n =5 V ,n=U*n /α=5/0.01=500 r/min
U c =U d0/K s =(E+I d R ∑)/K s =(C e n+I dLl R ∑)/Ks=(0.128*500+20*2)/30=3.467 V
2) 在上述稳定运行情况下,电动机突然失磁(Φ=0)则电动机无电动转矩,转速迅速下降到零,转速调节器很快达到饱和,要求整流装置输出最大电流I dm 。因此,系统稳定后, n=0,U n =0
U*i =U*im =10, U i =U*i =10 I d =I dm =30A
U c =U d0/K s =(E+I d R ∑)/K s =(0+30*2)/30=2 V
3) 在跟随给定作用下,转速环处于线性状态,此时系统的开环传递函数是:
()()()
112
++=
∑s T s s K s W n n N n τ
τn =hT ∑n =5*0.05=0.25s T ∑n =0.05s
K N =(h+1)/2h 2T 2=6/2*25*0.052=48s-2 4) 空载突加额定负载时,转速有动态降落。(p93,94)
Δn b =2(λ-z)Δn N T ∑n /T m =2*(1-0)*20*2/0.128*(0.05/0.05)= 625 r/min [ C b =2FK 2T=2I dN RT ∑n /C e T m =2*20*2*0.05/0.128*0.05=625 r/min ] 最大动态速降:Δn max =(ΔC max /C b )*Δn b =81.2%*625 =507.5 r/min 恢复时间:t v =8.8T=8.8*0.05=0.44s(p81表)
习题五
5.8两电平PWM 逆变器主回路,采用双极性调制时,用“1”表示上桥臂开通,“0”表示
上桥臂关断,共有几种开关状态,写出其开关函数。根据开关状态写出其电压空间矢量表达式,画出空间电压矢量图。 解:两电平PWM 逆变器主回路:
~
采用双极性调制时,忽略死区时间影响,用“1”表示上桥臂开通,“0”表示下桥臂开通,逆变器输出端电压:
12
2
d
x x d x U S u U S ?=??=??-=?? (21)2d
x x U u S =
-,
以直流电源中点'
O 为参考点
2()
j j A B C u u e u e =++γγs u
空间电压矢量图:
1
u 6
5
u
5.9当三相电压分别为AO u 、
BO
u 、
CO
u ,如何定义三相定子电压空间矢量
AO
u 、
BO
u 、
CO
u 和合成矢量
s
u ,写出他们的表达式。
解:A,B,C 为定子三相绕组的轴线,定义三相电压空间矢量:
2AO j BO j CO u u e u e ===γγ
AO BO CO u u u
合成矢量:
2j j AO BO CO u u e u e =++=++γγs AO BO CO u u u u
)
(0j e A
5.10忽略定子电阻的影响,讨论定子电压空间矢量
s
u 与定子磁链
s ψ的关系,当三相电压AO
u 、
BO
u 、
CO
u 为正弦对称时,写出电压空间矢量
s
u 与定子磁链
s
ψ的表达式,画出各自
的运动轨迹。
解:用合成空间矢量表示的定子电压方程式:
dt
d R s
s s s ψi u +
= 忽略定子电阻的影响,
dt
d s
s ψu ≈
dt ?≈?s s ψu ,
即电压空间矢量的积分为定子磁链的增量。 当三相电压为正弦对称时,定子磁链旋转矢量
)
(1?ωψ+=t j s e s ψ
电压空间矢量:
1()
21j t s e
πω++?≈ωψs u
电力电子技术 2-1与信息电子电路中的二极管相比,电力二极管具有怎样的结构特点才使得其具有耐受高压和大电流的能力? 答:1.电力二极管大都采用垂直导电结构,使得硅片中通过电流的有效面积增大,显著提高了二极管的通流能力。 2.电力二极管在P区和N区之间多了一层低掺杂N区,也称漂移区。低掺杂N区由于掺杂浓度低而接近于无掺杂的纯半导体材料即本征半导体,由于掺杂浓度低,低掺杂N区就可以承受很高的电压而不被击穿。 2-2. 使晶闸管导通的条件是什么? 答:使晶闸管导通的条件是:晶闸管承受正向阳极电压,并在门极施加触发电流(脉冲)。或:uAK>0且uGK>0。 2-3. 维持晶闸管导通的条件是什么?怎样才能使晶闸管由导通变为关断? 答:维持晶闸管导通的条件是使晶闸管的电流大于能保持晶闸管导通的最小电流,即维持电流。要使晶闸由导通变为关断,可利用外加电压和外电路的作用使流过晶闸管的电流降到接近于零的某一数值以下,即降到维持电流以下,便可使导通的晶闸管关断。 2-4 图2-27中阴影部分为晶闸管处于通态区间的电流波形,各波形的电流最大值均为I m ,试计算各波形的电流平均值I d1、I d2、I d3与电流有效值I1、I2、I3。 解:a) I d1= Im 2717 .0 )1 2 2 ( 2 Im ) ( sin Im 2 1 4 ≈ + = ?π ω π π π t I1= Im 4767 .0 2 1 4 3 2 Im ) ( ) sin (Im 2 1 4 2≈ + = ?π ? π π π wt d t b) I d2= Im 5434 .0 )1 2 2 ( 2 Im ) ( sin Im 1 4 = + = ?wt d t π π ? π I2= Im 6741 .0 2 1 4 3 2 Im 2 ) ( ) sin (Im 1 4 2≈ + = ?π ? π π π wt d t
电力电子技术答案 2-1与信息电子电路中的二极管相比,电力二极管具有怎样的结构特点才使得其具有耐受高压和大电流的能力?答:1.电力二极管大都采用垂直导电结构,使得硅片中通过电流的有效面积增大,显着提高了二极管的通流能力。 2.电力二极管在P区和N区之间多了一层低掺杂N区,也称漂移区。低掺杂N区由于掺杂浓度低而接近于无掺杂的纯半导体材料即本征半导体,由于掺杂浓度低,低掺杂N区就可以承受很高的电压而不被击穿。 2-2.使晶闸管导通的条件是什么?答:使晶闸管导通的条件是:晶闸管承受正向阳极 电压,并在门极施加触发电流(脉冲)。或:uAK>0且uGK>0 2-3 .维持晶闸管导通的条件是什么?怎样才能使晶闸管由导通变为关断?答:维持晶 闸管导通的条件是使晶闸管的电流大于能保持晶闸管导通的最小电流,即维持电流。 要使晶闸管由导通变为关断,可利用外加电压和外电路的作用使流过晶闸管的电流降 到接近于零的某一数值以下,即降到维持电流以下,便可使导通的晶闸管关断。 2-4图2-27中阴影部分为晶闸管处于通态区间的电流波形,各波形的电流最大值均为I m,试计算各波形的电流平均值I d1、I d2、I d3与电流有效值丨1、I 2、I 3。 2-5上题中如果不考虑安全裕量,问100A的晶阐管能送出的平均电流I d1、I d2、I d3各为多少这时,相应的电流最大值I m1、I m2 I m3各为多少 解:额定电流算结果知I T(AV)=100A的晶闸管,允许的电流有效值I=157A,由上题计 解:a)I d1= 24 Im sin( t) 罟"Em I—(Im sin t)2d(wt) 11= 2 410.4767Im 2 b) J—(Imsin t)2d(wt) d2= I 2= Im <2 Im sin td (wt) ( 1) 4 2 Im 3 1 4 2 0.67411m 0.5434 Im c) 丄2Im d( d3= 2 0 t) 1 Im 4 3= 1 2Im2d( t) 2 0 i Im
第一章:闭环控制的直流调速系统00000 1-1 为什么PWM-电动机系统比晶闸管-电动机系统能够获得更好的动态性能?答:PWM系统与V-M系统相比,在很多方面有较大的优越性: (1)主电路线路简单,需用的功率器件少; (2)开关频率高,电流容易连续,谐波少,电机损耗及发热都较小; (3)低速性能好,稳速精度高,调速范围宽,可达1:10000左右; (4)若与快速响应的电动机配合,则系统频带宽,动态响应快,动态抗扰能力强; (5)功率开关器件工作在开关状态,导通损耗小,当开关频率适当时,开关损耗也大, 因而装置效率较高; (6)直流电源采用不控整流时,电网功率因数比相控整流器高; 1-2 试分析有制动通路的不可逆PWM变换器进行制动时,两个VT是如何工作的。答:如图P13,1-17,制动状态时,先减小控制电压,使U g1的正脉冲变窄,负脉冲变宽,从而使平均电枢电压U d降低。但是,由于机电惯性,转速和反电动势还来不及变化,因而造成E>U d,很快使电流i d反向,VD2截止,在t on≤t<T时,U g2变正,于是VT2导通,反向电流沿回路3流通,产生能耗制动作用。在T≤t<T+t on(即下一周期的0≤t<T on)时,VT2关断,-i d沿回路4经VD1续流,向电源回馈制动,与此同时,VD1两端压降钳住VT1使它不能导通。在制动状态中,VT2和VD1轮流导通,而VT1始终是关断的。 有一种特殊状态,即轻载电动状态,这时平均电流较小,以致在VT1关断后i d经VD2续流时,还没有达到周期T,电流已经衰减到零,这时VD2两端电压也降为零,VT2便提前导通了,使电流反向,产生局部时间的制动作用。 1-3 调速范围和静差率的定义是什么?调速范围、静差速降和最小静差率之间有什么关系?为什么说“脱离了调速范围,要满足给定的静差率也就容易得多了”?答:生产机械要求电动机提供的最高转速和最低转速之比叫做调速范围,用字母
习题解答(供参考) 习题二 系统的调速范围是1000~100min r ,要求静差率s=2%,那么系统允许的静差转速降是多少? 解:10000.02(100.98) 2.04(1) n n s n rpm D s ?= =??=- 系统允许的静态速降为2.04rpm 。 某一调速系统,在额定负载下,最高转速特性为0max 1500min n r =,最低转速特性为 0min 150min n r =,带额定负载时的速度降落15min N n r ?=,且在不同转速下额定速降 不变,试问系统能够达到的调速范围有多大?系统允许的静差率是多少? 解:1)调速范围 max min D n n =(均指额定负载情况下) max 0max 1500151485N n n n =-?=-= min 0min 15015135N n n n =-?=-= max min 148513511D n n === 2) 静差率 01515010%N s n n =?== 直流电动机为P N =74kW,UN=220V ,I N =378A ,n N =1430r/min ,Ra=Ω。相控整流器内阻Rrec=Ω。采用降压调速。当生产机械要求s=20%时,求系统的调速范围。如果s=30%时,则系统的调速范围又为多少?? 解:()(2203780.023)14300.1478N N a N Ce U I R n V rpm =-=-?=
378(0.0230.022)0.1478115N n I R rpm ?==?+= (1)]14300.2[115(10.2)] 3.1N D n S n s =?-=??-= [(1)]14300.3[115(10.3)] 5.33N D n S n s =?-=??-= 某龙门刨床工作台采用 V-M 调速系统。已知直流电动机 60,220,305,1000min N N N N P kW U V I A n r ====,主电路总电阻R=Ω,Ce=?min/r,求: (1)当电流连续时,在额定负载下的转速降落N n ?为多少? (2)开环系统机械特性连续段在额定转速时的静差率N S 多少? (3)若要满足D=20,s ≤5%的要求,额定负载下的转速降落N n ?又为多少? 解:(1)3050.180.2274.5/min N N n I R r ?=?=?= (2) 0274.5(1000274.5)21.5%N N S n n =?=+= (3) [(1)]10000.05[200.95] 2.63/min N n n S D s r ?=-=??= 有一晶闸管稳压电源,其稳态结构图如图所示,已知给定电压* 8.8u U V =、比例调节器放 大系数2P K =、晶闸管装置放大系数15S K =、反馈系数γ=。求:(1)输出电压d U ;(2)若把反馈线断开,d U 为何值?开环时的输出电压是闭环是的多少倍?(3)若把反馈系数 减至γ=,当保持同样的输出电压时,给定电压*u U 应为多少? 解:(1)* (1)2158.8(12150.7)12d p s u p s U K K U K K V γ=+=??+??= (2) 8.8215264d U V =??=,开环输出电压是闭环的22倍 (3) * (1)12(12150.35)15) 4.6u d p s p s U U K K K K V γ=+=?+???= 某闭环调速系统的调速范围是1500r/min~150r/min ,要求系统的静差率5%s ≤,那么系统允许的静态速降是多少?如果开环系统的静态速降是100r/min ,则闭环系统的开环放大倍数应有多大? 解: 1)()s n s n D N N -?=1/
3章交流-直流变换电路课后复习题 第1部分:填空题 1.电阻负载的特点是电压与电流波形、相位相同;只消耗电能,不储存、释放电能,在单相半波可控整流电阻性负载电路中,晶闸管控制角α的最大移相范围是0?≤a≤ 180?。 2.阻感负载的特点是电感对电流变化有抗拒作用,使得流过电感的电流不发生突变,在单相半波可控整流带阻感负载并联续流二极管的电路中,晶闸管控制角α的最大移相范围是0? ≤a≤ 180? 2 ,续流二极管承受的最大反向电压 2 (设U2为相电压有效值)。 3.单相桥式全控整流电路中,带纯电阻负载时,α角移相范围为0?≤a≤ 180?,单 2和 2 ;带阻感负载时, α角移相范围为0?≤a≤ 90?,单个晶闸管所承受的最大正向电压和反向电压分别为 2 2U 2 ;带反电动势负载时,欲使电阻上的电流不出现断续现象,可在主电路中直流输出 侧串联一个平波电抗器(大电感)。 4.单相全控桥反电动势负载电路中,当控制角α大于不导电角δ时,晶闸管的导通角θ = 180?-2δ ; 当控制角α小于不导电角 δ 时,晶闸管的导通角 θ = 0?。 5.从输入输出上看,单相桥式全控整流电路的波形与单相全波可控整流电路的波形基 本相同,只是后者适用于较低输出电压的场合。 6. 2 ,随负载 加重U d 逐渐趋近于0.9 U2,通常设计时,应取RC≥ 1.5~2.5T,此时输出电压为U d ≈ 1.2 U2(U2为相电压有效值)。 7.电阻性负载三相半波可控整流电路中,晶闸管所承受的最大正向电压U Fm 2 ,晶闸管控制角α的最大移相范围是0?≤a≤90?,使负载电流连续的条件为a≤30?(U2为相电压有效值)。 8.三相半波可控整流电路中的三个晶闸管的触发脉冲相位按相序依次互差120?,当它 带阻感负载时,α的移相范围为0?≤a≤90?。 9.三相桥式全控整流电路带电阻负载工作中,共阴极组中处于通态的晶闸管对应的是 电压最高的相电压,而共阳极组中处于导通的晶闸管对应的是电压最低的相电压;这种电路 α 角的移相范围是0?≤a≤120?,u d波形连续的条件是a≤60?。 10*.电容滤波三相不可控整流带电阻负载电路中,电流i d断续和连续的临界条件是C Rω 3 =,电路中的二极管承受的最大反向电压为 2 U2。 11.实际工作中,整流电路输出的电压是周期性的非正弦函数,当 α 从0°~90°变化时, 整流输出的电压u d 的谐波幅值随 α 的增大而增大,当 α 从90°~180°变化时,整流输出的电压u d的谐波幅值随 α 的增大而减小。 12.三相桥式全控整流电路带阻感负载时,设交流侧电抗为零,直流电感L为足够大。当 α =30°时,三相电流有效值与直流电流的关系为I I d,交流侧电流中所含次谐波次数为 6k±1,k=1,2,3…,其整流输出电压中所含的谐波次数为 6k, k=1,2,3…。 13.对于三相半波可控整流电路,换相重迭角的影响,将使输出电压平均值减小。
第2章电力电子器件 与信息电子电路中的二极管相比,电力二极管具有怎样的结构特点才能使它具有耐受 高电压和大电流的能力 解:1. 电力二极管是垂直导电结构,使得硅片中通过电流的有效面积增大,提高通流 能力 2.电力二极管在P区和N区多了一层低掺杂区,可以承受很高的电压而不致被击穿; 3.具有电导调制效应。 使晶闸管导通的条件是什么 答:使晶闸管导通的条件是:晶闸管承受正相阳极电压,并在门极施加触发电流(脉冲)。 或者U AK >0且U GK>0 维持晶闸管导通的条件是什么怎样才能使晶闸管由导通变为关断 答:维持晶闸管导通的条件是使晶闸管的电流大于能保持晶闸管导通的最小电流,即维 持电流。 图2-27中阴影部分为晶闸管处于通态区间的电流波形,各波形的电流最大值均为Im, 试计算各波形的电流平均值I d1,I d2,I d3与电流有效值I1,I2,I3 解:a) Id1= Im I1== b) Id2== Im I2= Im c) Id3== Im I3== Im .上题中如果不考虑安全裕量,问100A的晶阐管能送出的平均电流Id1、Id2、Id3各为 多少这时,相应的电流最大值Im1,Im2,Im3各为多少 解:额定电流I T(AV)=100A的晶闸管,允许的电流有效值I=157A,由上题计算结果知 a) Im1=I/=, ≈≈89.48A b) Im2=I/ = Id2= = c) Im3=2I=314 Id3= = 和普通晶闸管同为PNPN结构,为什么GTO能够自关断,而普通晶闸管不能 答: GTO之所以能够自行关断,而普通晶闸管不能,是因为GTO与普通晶闸管在设计和 工艺方面有以下几点不同:
第二章 2-1:答:在制动阶段,VT1始终不导通。VT2导通期间,并能耗制动;VT2不导通期间, VD1续流,并回馈制动。 2-2:由 10100 1000== D ; rpm s D s n n n N N cl 04.298 .01002.01000) 1(=??≤ -= ?=?; 2-3:已知 rpm n n n N 1500max max 0=?+= rpm n n n N 150min min 0=?+= max n n N =,rpm n N 15=? 所以1115 150151500min max =--= = n n D 1.015 11148515 11=?+?= ?+?= D n n D n s N N N 2-4: r v n R I U C N a N N e min/1478.0/)(?=-= rpm C R R I n e s a N op 1.1151478.0/045.0378/)(=?=+=? 1.38.0*1.115 2.0*1430) 1(==-?=s n s n D N N 32 .57 .0*1.1153.0*1430) 1(== -?= s n s n D N N 2-5: rpm C R I n e N op 5.2742.0/18.0305/=?==? /()27.45%N op N op s n n n =?+?= rpm s D s n n n N N cl 63.295 .02005.01000) 1(=??≤ -= ?=? 2-6: v K K U K K U s p u s p dcl 121 =+= γ 264==u s p dop U K K U 22/=dcl dop U U v U K K K K U dcl s p s p u 6.41=+= γ 2-7: 10=D
浅析电力拖动自动控制系统 【摘要】电力拖动控制系统是一种较为重要的控制系统,其在工业生产中发挥着很大的作用,随着社会的发展以及科技的推动,这一系统开始趋向于自动化的应用形式。电能在人们的生活中发挥着重要的作用,电器的种类越来越多,现代社会对电力的需求量也越来越大,所以,自动化的电力拖动控制系统,可以更好的满足人类社会对电力的需求。本文分析了电力拖动自动控制系统的设计原理,还介绍了电力拖动自动控制系统的安全防护,希望对相关电力人员有所帮助,使相关企业生产可以更加安全、稳定的进行。 【关键词】电力拖动;系统;自动控制;原理;安全防护 电力拖动系统在工业领域应用极其广泛,伴随着我国科技的发展,工业企业的生产效率越来越高,人类社会对电能的需求量也越来越大。很多工业企业引进了先进的机械设备,提高了企业的生产水平,同时也对电力拖动控制系统提出了更高的要求,所以,电力拖动控制系统的自动化也是企业未来发展的必然趋势。电力拖动自动控制系统是对传统系统的改进与优化,这种系统在运行的过程中,更加安全稳定,而且满足了企业对自动化机械设备生产运行的要求。为了使电力拖动自动控制系统发挥更大的效用,相关人员要研究出更加完善的安全防护措施,这也可以为企业增产以及效益提升做出更大的贡献。 1.电力拖动自动控制系统的设计原理 电力拖动控制系统在工业企业生产中发挥着重要的作用,工作人员在系统运行的过程中,可以更好的掌握电动机的运行状况,还可以通过信息反馈,了解企业生产运行机制的运转情况,比较常见的反馈信息是电流信息。电力拖动控制系统中包含着很多的构件,其中电气设备是生产运行机制中比较重要的系统,其也是企业实现机械自动控制的关键因素。在利用计算机设备,可以在系统运行的过程中,可以直观的从显示器中,了解设备的运行状况,通过计算机等设备的信息反馈,可以有效的实现电力拖动的自动化控制。 实现电力拖动控制系统的自动化运行,需要借助先进的计算机技术,相关工作人员通过计算机信息的反馈,以及企业生产需求的变化,可以有效的制定出不同的控制方案,还可以实现机械运行的自动化生产。在这一过程中,计算机的编程起着至关重要的作用,计算机不但具有强大的计算等功能,还具有操作便捷等特点,所以,工作人员一定要多了解计算机相关知识,这样才能编制出独立的驱动程序,实现多种设备的自动控制。工作人员还要利用计算机操作技术,实现系统的对接测试,这些步骤有利于简化电力拖动自动化控制编程。电力拖动自动控制系统的各项参数可以认为调动,根据不同的要求,技术人员可以更改编程,所以这项工作具有一定的变动性。但是从系统的设计原理来看,电力拖动自动控制系统在调整的过程中,需要遵循一定的设计原则,其主要是利用计算机作为控制中心,而且是通过信号传输完成下达命令以及执行命令这一系列工作。
电力电子课后答案 第二章 2.2 使晶闸管导通的条件是什么?维持晶闸管导通的条件是什么?怎样才能使晶闸管由导通变为关断? 答: 使晶闸管导通的条件是:晶闸管承受正相阳极电压,并在门极施加触发电流(脉冲)。或者U AK >0且U GK >0; 维持晶闸管导通的条件是使晶闸管的电流大于能保持晶闸管导通的最小电流,即维持电流。 2.3图2-1中阴影部分表示流过晶闸管的电流波形,各波形的电流最大值均为m I , 试计算各波形的电流平均值1d I 、2d I 、3d I 与电流有效值1I 、2I 、3I ,和它们的波形系数1f K ,2f K ,3f K 。 题图2.1 晶闸管导电波形 解: a) 1d I = 4 1 2sin()(1)0.27222 m m m I I t I π π ωπ π= +≈? 1I 24 131(sin )()0.4822 42m m m I I t d wt I ππ ?π π = +≈? 111/0.48/0.27 1.78f d m m K I I I I === b) 2d I =412 sin ()(1)0.5422 m m m I I td wt I ππ?=+=∏? 2I 24 21 31(sin )()0.67242m m m I I t d wt I π π ?π π = +≈? 222/0.67/0.54 1.24f d m m K I I I I === c) 3d I = 20 1 1()24 m m I d t I π ωπ = ? 3I 220 1 1()22 m m I d t I π ωπ = ? 333/0.5/0.252f d m m K I I I I === 2.4. 如果上题中晶闸管的通态平均电流为100A ,考虑晶闸管的安全裕量为1.5,问其允许通
电力拖动自动控制系统运动控制系统第版习题 答案 HUA system office room 【HUA16H-TTMS2A-HUAS8Q8-HUAH1688】
习题解答(供参考) 习题二 2.2 系统的调速范围是1000~100min r ,要求静差率s=2%,那么系统允许的静差转速降是多少? 解:10000.020.98) 2.04(1) n n s n rpm D s ?= =??=- 系统允许的静态速降为2.04rpm 。 2.3 某一调速系统,在额定负载下,最高转速特性为0max 1500min n r =,最低转速特性为 0min 150min n r =,带额定负载时的速度降落15min N n r ?=,且在不同转速下额定速降 不 变,试问系统能够达到的调速范围有多大系统允许的静差率是多少 解:1)调速范围 max min D n n =(均指额定负载情况下) 2) 静差率 01515010%N s n n =?== 2.4 直流电动机为P N =74kW,UN=220V ,I N =378A ,n N =1430r/min ,Ra=0.023Ω。相控整流器内阻Rrec=0.022Ω。采用降压调速。当生产机械要求s=20%时,求系统的调速范围。如果s=30%时,则系统的调速范围又为多少? 解:()(2203780.023)14300.1478N N a N Ce U I R n V rpm =-=-?=
2.5 某龙门刨床工作台采用V-M 调速系统。已知直流电动机 60,220,305,1000min N N N N P kW U V I A n r ====,主电路总电阻R=0.18Ω,Ce=0.2Vmin/r, 求: (1)当电流连续时,在额定负载下的转速降落N n ?为多少? (2)开环系统机械特性连续段在额定转速时的静差率N S 多少? (3)若要满足D=20,s ≤5%的要求,额定负载下的转速降落N n ?又为多少? 解:(1)3050.180.2274.5/min N N n I R Ce r ?=?=?= (2) 0274.5(1000274.5)21.5%N N S n n =?=+= (3) (1)]10000.050.95] 2.63/min N n n S D s r ?=-=??= 2.6 有一晶闸管稳压电源,其稳态结构图如图所示,已知给定电压* 8.8u U V =、比例调节 器放大系数2P K =、晶闸管装置放大系数15S K =、反馈系数γ=0.7。求:(1)输出电压 d U ;(2)若把反馈线断开,d U 为何值开环时的输出电压是闭环是的多少倍(3)若把反 馈系数减至γ=0.35,当保持同样的输出电压时,给定电压*u U 应为多少? 解:(1)*(1)2158.8(12150.7)12d p s u p s U K K U K K V γ=+=??+??=
习题解答(供参考) 习题二 2.2 系统的调速范围是1000~100 min r ,要求静差率s=2%,那么系统允许的静差转速降是多少? 解: 10000.02(100.98) 2.04(1) n n s n rpm D s ?= =??=- 系统允许的静态速降为 2.04rpm 。 2.3 某一调速系统,在额定负载下,最高转速特性为 0max 1500min n r =,最低转速特性为 0min 150min n r =,带额定负 载时的速度降落15min N n r ?=,且在不同转速下额定速降 不变,试问系统能够达到的调速范围有多大?系统允许的静差率是多少? 解:1)调速范围 max min D n n =(均指额定负载情况下) max 0max 1500151485N n n n =-?=-= min 0min 15015135N n n n =-?=-= max min 148513511D n n === 2) 静差率 01515010%N s n n =?== 2.4 直流电动机为P N =74kW,UN=220V ,I N =378A ,n N =1430r/min ,Ra=0.023Ω。相控整流器内阻Rrec=0.022Ω。采用降压调速。当生产机械要求s=20%时,求系统的调速范围。如果s=30%时,则系统的调速范围又为多少?? 解: ()(2203780.023)14300.1478N N a N Ce U I R n V rpm =-=-?=
378(0.0230.022)0.1478115N n I R C e r p m ?==?+= [(1)]14300.2[115(10.2)] 3.1N D n S n s =?-=??-= [(1)]14300.3[115(10.3)] 5.33 N D n S n s =?-=??-= 2.5 某龙门刨床工作台采用V-M 调速系统。已知直流电动机,主电路总电阻R=0.18Ω,Ce=0.2V ?min/r,求: (1)当电流连续时,在额定负载下的转速降落 N n ?为多少? (2)开环系统机械特性连续段在额定转速时的静差率 N S 多少? (3)若要满足D=20,s ≤5%的要求,额定负载下的转速降落 N n ?又为多少? 解:(1) 3050.180.2274.5/min N N n I R Ce r ?=?=?= (2) 0274.5(1000274.5)21.5%N N S n n =?=+= (3) [(1)]10000.05[200.95] 2.63/min N n n S D s r ?=-=??= 2.6 有一晶闸管稳压电源,其稳态结构图如图所示,已知给定电压 * 8.8u U V =、比例调节器放大系数2P K =、晶闸管装置放大系数 15S K =、反馈系数γ=0.7。求:(1)输出电压d U ;(2)若把反馈线断开,d U 为何值?开环时的输出电压是闭环是的多少倍?(3)若 把反馈系数减至γ=0.35,当保持同样的输出电压时,给定电压 * u U 应为多少? 解:(1) * (1)2158.8(12150.7)12d p s u p s U K K U K K V γ=+=??+??= (2) 8.8215264d U V =??=,开环输出电压是闭环的22倍 (3) * (1)12(12150.35)(215) 4.6u d p s p s U U K K K K V γ=+=?+???= 2.7 某闭环调速系统的调速范围是1500r/min~150r/min ,要求系统的静差率5%s ≤,那么系统允许的静态速降是多少?如果开环系统的静态 速降是100r/min ,则闭环系统的开环放大倍数应有多大? 解: 1) ()s n s n D N N -?=1/ 1015002%/98%N n =??? 15002%/98%10 3.06/min N n r ?=??= 2) () 7.31106.3/1001/=-=-??=cl op n n K
《电力电子技术》习题及解答 思考题与习题 什么是整流它与逆变有何区别 答:整流就是把交流电能转换成直流电能,而将直流转换为交流电能称为逆变,它是对应于整流的逆向过程。 单相半波可控整流电路中,如果: (1)晶闸管门极不加触发脉冲; (2)晶闸管内部短路; (3)晶闸管内部断开; 试分析上述三种情况负载两端电压u d和晶闸管两端电压u T的波形。 答:(1)负载两端电压为0,晶闸管上电压波形与U2相同; (2)负载两端电压为U2,晶闸管上的电压为0; (3)负载两端电压为0,晶闸管上的电压为U2。
某单相全控桥式整流电路给电阻性负载和大电感负载供电,在流过负载电流平均值相同的情况下,哪一种负载的晶闸管额定电流应选择大一些 答:带大电感负载的晶闸管额定电流应选择小一些。由于具有电感,当其电流增大时,在电感上会产生感应电动势,抑制电流增加。电阻性负载时整流输出电流的峰值大些,在流过负载电流平均值相同的情况下,为防此时管子烧坏,应选择额定电流大一些的管子。 某电阻性负载的单相半控桥式整流电路,若其中一只晶闸管的阳、阴极之间被烧断,试画出整流二极管、晶闸管两端和负载电阻两端的电压波形。 解:设α=0,T 2被烧坏,如下图: 相控整流电路带电阻性负载时,负载电阻上的U d 与I d 的乘积是否等于负载有功功率,为什么带大电感负载时,负载电阻R d 上的U d 与I d 的乘积是否等于负载有功功率,为什么 答:相控整流电路带电阻性负载时,负载电阻上的平均功率d d d I U P =不等于负载有功功率UI P =。因为负载上的电压、电流是非正弦波,除了直流U d 与I d 外还有谐波分量Λ ,,21U U 和Λ,,21I I ,负载上有功功率为Λ+++=22212P P P P d >d d d I U P =。
王兆安《电力电子技术》(第4版)课后习题解 第1章 电力电子器件 1.1 使晶闸管导通的条件是什么? 答:使晶闸管导通的条件是:晶闸管承受正向阳极电压,并在门极注入正向触发电流。 1.2 维持晶闸管导通的条件是什么?怎样才能使晶闸管由导通变为关断? 答:维持晶闸管导通的条件是使晶闸管的电流大于能保持晶闸管导通的最小电流(即维持电流),即H A I I >。 要使晶闸管由导通变为关断,可通过外加反向阳极电压或减小负载电流的办法,使流过晶闸管的电流降到维持电流值以下,即H A I I <。 1.3 图1-43中阴影部分为晶闸管处于通态区间的电流波形,各波形的电流最大值均为m I 。 试计算各波形的电流平均值1d I ,2d I ,3d I 与电流有效值1I ,2I ,3I 。 解:a ) m m m d I I t d t I I 2717.0)12 2( 2)()(sin 214 1≈+= = ?π ωωπ ππ m m m I I t d t I I 4767.021432)()sin (214 21≈+= =? π ω?πππ b ) m m m d I I t d t I I 5434.0)12 2 ( )()(sin 1 4 2≈+= = ? π ωωπ ππ m m m I I t d t I I 6471.0214322)()sin (1 4 22≈+= = ? π ω?π ππ c ) ? = =20 3 4 1)(21π ωπ m m d I t d I I m m I t d I I 2 1)(21 20 2 3= = ? ωπ π 1.4 上题中如果不考虑安全裕量,问100A 的晶阐管能送出的平均电流1d I 、2d I 、3d I 各为多少?这时,相应的电流最大值1m I 、2m I 、3m I 各为多少? 解:额定电流A I AV T 100)(=的晶闸管,允许的电流有效值A I 157=,由上题计算结果知: a ) A I I m 35.3294767.01≈≈ A I I m d 48.892717.011≈≈ b ) A I I m 90.2326741 .02≈≈ A I I m d 56.1265434.022≈≈ c ) A I I m 31423== A I I m d 5.784 1 33== 1.5 GTO 和普通晶闸管同为PNPN 结构,为什么GTO 能够自关断,而普通晶闸管不能? 答:GTO 和普通晶阐管同为PNPN 结构,由211P N P 和221N P N 构成两个晶体管1V 、2V ,分别具有共基极电 流增益1α和2α,由普通晶阐管的分析可得,121=+αα是器件临界导通的条件。121> αα+两个等效晶体管过饱和而导通;121< αα+不能维持饱和导通而关断。 GTO 之所以能够自行关断,而普通晶闸管不能,是因为GTO 与普通晶闸管在设计和工艺方面有以下几点 图1-43 晶闸管导电波形
1-1为什么PWM-电动机系统比晶闸管----电动机系统能够获得更好的动态性能? 答:PWM 开关频率高,响应速度快,电流容易连续,系统频带宽,动态 响应快,动态抗扰能力强。 1-2试分析有制动通路的不可逆PWM 变换器进行制动时,两个VT 是如何工作的? 答:制动时,由于1g U 的脉冲变窄而导致d i 反向时,U g2 变正,于是VT 2导通, VT 2导通,VT 1关断。 1-3调速范围和静差率的定义是什么?调速范围,静态速降和最小静差之间有什么 关系?为什么脱离了调速范围,要满足给定的静差率也就容易得多了? 答:生产机械要求电动机提供的最高转速 max n 和最低转速min n 之比叫做调速范围, 用字母D 表示,即:min max n n D = 负载由理想空载增加到额定值时,所对应的转速降落N n ? 与理想空载转速min 0n 之比,称为系统的静差率S,即:min 0n n s N ?= 调速范围,静差速降和最小静差之间的关系为: ) 1(s n s n D N N -?= 由于在一定的N n 下,D 越大,min n 越小N n ? 又一定,则S 变大。所以,如果不考虑D ,则S 的调节也就会容易, 1-4.某一调速系统,测得的最高转速特性为min /1500max 0r n =,最低转速特性为 min /150min 0r n =,带额定负载的速度降落min /15r n N =?,且不同转速下额定速降N n ?不变,试问系统能够达到的调速范围有多大?系统允许的静差率是多大? 解 1115 150151500min 0max 0min max =--= ?-?-= = N N n n n n n n D %10150 15min 0== ?=n n s
★采用计算机控制电力传动系统的优越性在于:(1)可显著提高系统性能。采用数字给定、数字控制和数字检测,系统精度大大提高可根据控制对象的变化,方便地改变控制器参数,以提高系统抗干扰能力(2)可采用各种控制策略。可变参数PID和PI控制;自适应控制;模糊控制;滑模控制;复合控制。(3)可实现系统监控功能。状态检测;数据处理、存储与显示;越限报警;打印报表等。 ★数字测速方法:1. 旋转编码器:光电转换;增量式旋转编码器; 脉冲数字(P/D)转换方法:(1)M法—脉冲直接计数方法;(2)T 法—脉冲时间计数方法;(3)M/T法—脉冲时间混合计数方法 M法测速:工作原理:由计数器记录PLG发出的脉冲信号;定时器每隔时间T c向CPU发出中断请求INTt;CPU响应中断后,读出计数值M1,并将计数器清零重新计数;根据计数值M 计算出对应的转速值n。 ★计算公式:式中Z为PLG每转输出的脉冲个数; ★M法测速的分辨率: ★M法测速误差率:在上式中,Z 和T c均为常值,因此转速n 正比于脉冲个数。高速时Z大,量化误差较小,随着转速的降低误差增大,转速过低时将小于1,测速装置便不能正常工作。所以,M法测速只适用于高速段。 ★T法测速:工作原理:计数器记录来自CPU的高频脉冲f0;PLG每输出一个脉冲,中断电路向CPU发出一次中断请求;CPU 响应INTn中断,从计数器中读出计数值M2,并立即清零,重新计数。 ★计算公式: ★T法测速的分辨率: ★T法测速误差率:低速时,编码器相★邻脉冲间隔时间长,测得的高频时钟脉冲个数M2多,所以误差率小,测速精度高,故T法测速适用于低速段。 ★两种测速方法的比较:M法测速在高速段分辨率强;T法测速在低速段分辨率强。因此,可以将两种测速方法相结合,取长补短。既检测T c时间内旋转编码器输出的脉冲个数M1,又检测同一时间间隔的高频时钟脉冲个数M2,用来计算转速,称作M/T法测速。 ★M/T法测速:电路结构 ★工作原理:T0定时器控制采样时间;M1计数器记录PLG脉冲;M2计数器记录时钟脉冲。 ★计算公式:
《电力电子技术》第1章课 后习题答案 -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
1.1 晶闸管导通的条件是什么由导通变为关断的条件是什么 答:使晶闸管导通的条件是:晶闸管承受正向阳极电压,并在门极施加触发电流(脉冲)。或:u AK>0且u GK>0。 要使晶闸管由导通变为关断,可利用外加电压和外电路的作用使流过晶闸管的电流降到接近于零的某一数值以下,即降到维持电流以下,便可使导通的晶闸管关断。 1.2晶闸管非正常导通方式有几种 1.3 (常见晶闸管导通方式有5种,见课本14页,正常导通方式有:门级加触 发电压和光触发) 答:非正常导通方式有: (1) Ig=0,阳极加较大电压。此时漏电流急剧增大形成雪崩效应,又通过正反馈放大漏电流,最终使晶闸管导通; (2) 阳极电压上率du/dt过高;产生位移电流,最终使晶闸管导通 (3) 结温过高;漏电流增大引起晶闸管导通。 1.3 试说明晶闸管有那些派生器件。 答:晶闸管派生器件有:(1)快速晶闸管,(2)双向晶闸管,(3)逆导晶闸管,(4)光控晶闸管 1.4 GTO和普通晶闸管同为PNPN结构,为什么GTO能够自关断,而普通晶闸管不能? 答:GTO和普通晶闸管同为 PNPN 结构,由 P1N1P2 和 N1P2N2 构成两个晶体管 V1、V2 分别具有共基极电流增益α1 和α2,由普通晶闸管的分析可得,α1 + α 2 = 1 是器件临界导通的条件。α1 + α 2>1 两个等效晶体管过饱和而导通;α1 + α 2<1 不能维持饱和导通而关断。 GTO 之所以能够自行关断,而普 通晶闸管不能,是因为 GTO 与普通晶闸管在设计和工艺方面有以下几点不同:
《电力拖动自动控制系统—运动控制系统》习题 2-2 调速系统的调速范围是 1000~100r/min ,要求静差率 s=2%,那么系统允许的稳态速降是 多少? 解:系统允许的稳态速降 sn 0 02 × 100 ? n N = = = 2 04( r min ) ( 1 ? s ) ( 1 ? 0 02) 2-5 某龙门刨床工作台采用晶闸管整流器-电动机调速系统。已知直流电动机 = 60 k W , P N U N = 220 V , I N = 305 A , n N = 1000 r m in , 主 电 路 总 电 阻 R = 0 18? , C = 0 2 V ? min r ,求: (1)当电流连续时,在额定负载下的转速降落 ?n 为多少? N (2)开环系统机械特性连续段在额定转速时的静差率 s 多少? N (3)额定负载下的转速降落 ?n 为多少,才能满足 D = 20, s ≤ 5% 的要求。 N 解:(1)当电流连续时,在额定负载下的转速降落 I R 305 × 0 18 N ? n = = = 274 5( r min ) N C 0 2 (2)开环系统机械特性连续段在额定转速时的静差率 ? n 274 5 N s = = ≈ 0 215 = 21 5% N n + ? n 1000 + 274 5 N N (3)额定负载下满足 D = 20, s ≤ 5% 要求的转速降落 n s 1000 × 0 05 N ? n = = ≈ 2 63 ( r min ) N D ( 1 ? s ) 20 × ( 1 ? 0 05) 2-6 有一晶闸管稳压电源,其稳态结构如图所示,已知给定电压 U u = 8 8 V , 比例调节放大 系数 K = 2, 晶闸管装置放大系数 K = 15, 反馈系数 γ = 0 7 。求: p (1)输出电压 U ; d (2)若把反馈线断开, U 为何值?开环时的输出电压是闭环时的多少倍? d (3)若把反馈系数减至 γ = 5 U 应为多少? u 解:(1)输出电压 K K 2 × 15 p s U = U = × 8 8 = 12( V ) ; d u 1 + K K γ 1 + 2 × 15 × 0 7 p s (2)若把反馈线断开, U = K K U = 2 × 15 × 8 8 = 264 ( V) ;开环时的输出电压是闭环 d p s u 时的 264 12 = 22 倍。 (3)若把反馈系数减至 γ = 5 ,当保持同样的输出电压时,给定电压 1 + K K γ 1 + 2 × 15 × 0 35 p s U = U = × 12 = 4 6( V ) 。 u d K K 2 × 15 p s
电力电子技术第五版课后习题及答案 第二章电力电子器件 2-1与信息电子电路中的二极管相比,电力二极管具有怎样的结构特点才使得其具有耐受高压和大电流的能力? 答:1.电力二极管大都采用垂直导电结构,使得硅片中通过电流的有效面积增大,显著提高了二极管的通流能力。 2.电力二极管在P区和N区之间多了一层低掺杂N区,也称漂移区。低掺杂N区由于掺杂浓度低而接近于无掺杂的纯半导体材料即本征半导体,由于掺杂浓度低,低掺杂N区就可以承受很高的电压而不被击穿。 2-2.使晶闸管导通的条件是什么? 答:使晶闸管导通的条件是:晶闸管承受正向阳极电压,并在门极施加触发电流(脉冲)。或:uAK>0且uGK>0。 2-3.维持晶闸管导通的条件是什么?怎样才能使晶闸管由导通变为关断? 答:维持晶闸管导通的条件是使晶闸管的电流大于能保持晶闸管导通的最小电流,即维持电流。要使晶闸管由导通变为关断,可利用外加电压和外电路的作用使流过晶闸管的电流降到接近于零的某一数值以下,即降到维持电流以下,便可使导通的晶闸管关断。 2-4图2-27中阴影部分为晶闸管处于通态区间的电流波形,各波形的电流最大值均为Imπ4π4π25π4a)b)c)图1-43
图2-27晶闸管导电波形 解:a)I d1=π21ππωω4 )(sin t td I m=π2m I(122+)≈0.2717I m I1=π π ωωπ42)()sin(21 t d t I m=2m Iπ 2143+≈0.4767I m b)I d2= π1ππωω4)(sin t td I m=πm I(122+)≈0.5434I m I 2=ππωωπ42)()sin(1t d t I m=2 2m Iπ2143+≈0.6741I m c)I d3=π2120)(πωt d I m=4 1I m I3=2 02)(21πωπt d I m=2 1I m2-5上题中如果不考虑安全裕量,问100A的晶闸管能送出的平均电流I d1、I d2、I d3各为多少?这时,相应的电流最大值I m1、I m2、I m3各为多少? 解:额定电流I T(AV)=100A的晶闸管,允许的电流有效值I =157A,由上题计算结果知 a)I m1≈4767 .0I≈329.35,I d1≈0.2717I m1≈89.48 2/16b)I m2≈6741.0I≈232.90, I d2≈0.5434I m2≈126.56c)I m3=2I=314, I d3=41