分散式控制系统的组态
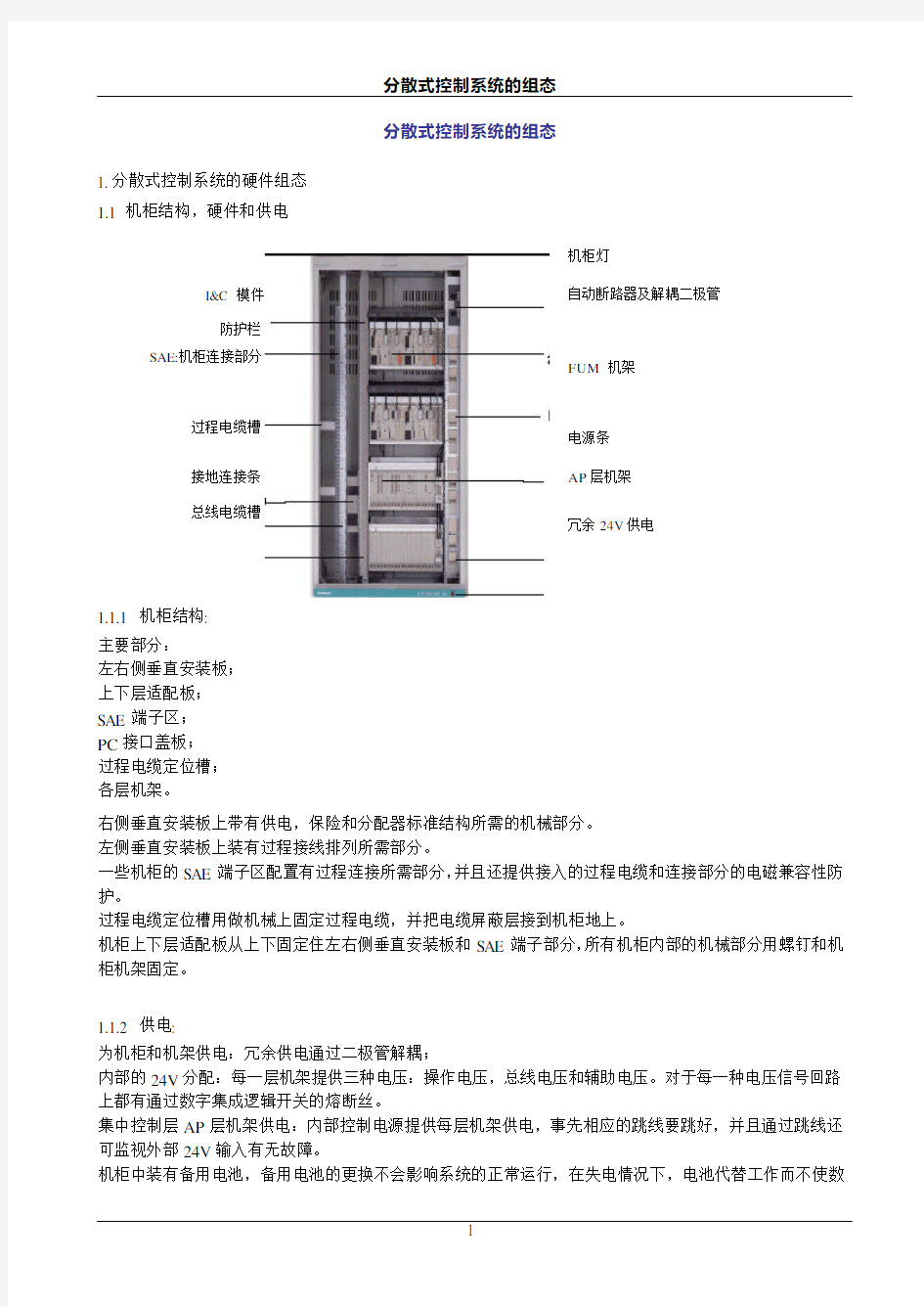
1. 分散式控制系统的硬件组态 1.1 机柜结构,硬件和供电
1.1.1 机柜结构: 主要部分:
左右侧垂直安装板; 上下层适配板; SAE 端子区; PC 接口盖板; 过程电缆定位槽; 各层机架。
右侧垂直安装板上带有供电,保险和分配器标准结构所需的机械部分。 左侧垂直安装板上装有过程接线排列所需部分。 一些机柜的SAE 端子区配置有过程连接所需部分,并且还提供接入的过程电缆和连接部分的电磁兼容性防护。
过程电缆定位槽用做机械上固定过程电缆,并把电缆屏蔽层接到机柜地上。 机柜上下层适配板从上下固定住左右侧垂直安装板和SAE 端子部分,所有机柜内部的机械部分用螺钉和机柜机架固定。
1.1.2 供电:
为机柜和机架供电:冗余供电通过二极管解耦;
内部的24V 分配:每一层机架提供三种电压:操作电压,总线电压和辅助电压。对于每一种电压信号回路上都有通过数字集成逻辑开关的熔断丝。
集中控制层AP 层机架供电:内部控制电源提供每层机架供电,事先相应的跳线要跳好,并且通过跳线还可监视外部24V 输入有无故障。
机柜中装有备用电池,备用电池的更换不会影响系统的正常运行,在失电情况下,电池代替工作而不使数
I&C 模件 防护栏
SAE:机柜连接部分
过程电缆槽
接地连接条 总线电缆槽
机柜灯
自动断路器及解耦二极管
FUM 机架 电源条 AP 层机架 冗余24V 供电
AP层机架有三个风扇,故障通过红色发光二极管显示。
机柜的连接和绕线:
过程电缆用压线枪固定在机柜里,屏蔽线接在机柜地上。
接地概念:
老系统里一般是多点接地,TXP多采用单点接地。
1.2 FUM-B 模件
FUM-B 模件包括:
FUM-210 既能作为开关量采集又可用于驱动器控制模件
用于开关量采集的FUM 210BT:
采集28个单节点或14个双节点信号;
多种参数化监视功能;
可冗余配置。
用做驱动器控制的FUM210DCM:
每一块模件最多控制3个双向驱动器,5个执行器或5个马达/电磁阀;
驱动器的类型可以混合使用;
采集并监视反馈信号;
可冗余配置。
FUM-230 模拟量采集模件
采集16个两线或四线制0/4到20mA模拟量信号;
模件每个通道可直接监视四个限值;
监视信号是否越限;
可冗余配置。
FUM-280 连续控制器模件
模件内实现2个闭环控制器或者在AP里实现4个闭环控制器或2个带有控制台的闭环控制器;
采集并监视反馈信号;
可冗余配置。
FUM-511 开关量信号耦合模件
16个开关量输入和输出功能。
FUM-531 模拟量信号耦合模件
带监视的4个模拟量(电流或电压)输入和输出功能。
FUM-232 热电偶热和电阻模拟量信号采集模件
采集28个热电偶或14个热电阻信号;
每个通道可直接监视四个限值;
多种补偿方式;
监视信号是否越限;
可冗余配置;
温差测量。
一般地:只要在模件里设置不同的参数即可完成不同的任务,无需额外的跳线或其它工作。模件运行周期
设置参数是个纯软件工作,例如FUM210根据参数设置可以处理8种不同的驱动器类型。
模件安排在提供21个插槽的EU901机架中,IM614占用了其中的一个或两个插槽,这取决于分散式控制系统单一的或冗余设计。
这样的话,每层经机架最多可插19/20块模件,至多一条链上4层机架接到IM304,每一个AS620至多带6层机架。
每层机架背部面板设有地址,从3往上递增到8,根据这个地址系统识别参数往哪里下载。
1.3 SIM模件
SIM 模件用于就地,无需参数化,通过L2总线/Profibus总线和AP进行通讯。与每个信号都需要电缆从就地到机柜连接比较,这种通讯方式地优点在于每一个SIM站只需两根L2总线电缆连接。它们的应用程序已固化,额外的功能在AP中里实现,SIM模件可完成和FUM模件相似的功能。这意味着SIM模件每实现一个功能,相应的 AP里的功能块就要运行,增加了AP的负荷。
另外SIM模件软件不会产生带时间标签的数据,但通过独立硬件可以产生特殊的10 ms周期的时间标签的数据。
从组态的角度看,FUM 模件和SIM模件没有区别。
SIM模件链可单独或冗余和AP相连设计。
2. 分散式控制系统的软件组态
分散式控制系统的软件组态是在工作站ES680上完成的,这首先需要用户登录口令,在具有一定的权限下才能做相应的修改。所有的用户程序都是在功能图编辑器(FUP-Editor)里生成。它不仅仅可以修改旧组态,还可以完成新组态。
当组态完成,需要把新做的组态生成代码,仅在代码无误的情况下,系统才允许生成的代码下载。另外还有一种快速修改参数的方法:在线修改参数和常数,无需生成代码。这节省了代码生成下载的时间,适用于少量的参数化修改,若是一批大量修改,还是采用离线修改,代码生成,在线传送的方法。
2.1 功能图介绍
功能图编辑器里完成的各类图形分层结构如下:
YDH 硬件概貌图,显示分散式控制系统组成,以及局域网的连接。
YDM 机柜概貌图
YDR 硬件详细图,显示每层机架的布置以及每块模件各通道信号分配
YFH 软件概貌图
YFM 区域概貌图
YFR 详细功能图
不同类型图以及它们的分层结构
各类型图和它们的分层结构
各种图形以及它们的分层结构,系统支持硬件图YDH、YDM和YDR之间依次跳转,同理软件图YFH、YFM和YFR亦可顺序跳转。软件概貌图YFH、YFM不需要生成、下载代码,工作站ES680提供了组态各种图形的菜单。
2.2 名称标识号
电厂每一个信号和设备都有名称,运行人员根据它可以快速识别。同样,在分散控制系统中,每一个设备和信号也有自己的名称标识号,项目设计开始时定义名称标识号的格式,系统只识别已定义过的格式,不匹配的格式不认,但随时可以添加新的格式。图形编辑器里产生的每张图,有各自的名称。
2.3 功能区和功能区号
电厂分成若干功能区,每个功能区用两个字符名称命名,这叫做功能区FC;每个功能区下面又有不同的
子系统,完成相应不同功能,这就是功能组FGC。名称标识号不仅识别每张图形和画面,而且可分辨它所在的功能区以及功能组。这有利于正确组态和运行跟踪。一般地,名称标识号是标准的,但用户也可自行设计。
2.4 用户程序的生成
2.4.1 离线传送的生成
第一次自动系统代码下载要离线生成,调试后也需要离线生成。
步骤如下:
a) 硬件生成(菜单上:Generators->AP->Code Hardware)
硬件部分的代码生成用来生成模件和功能模件机架的所有的参数数据记录。
此项生成仅用于硬件修改后,并且不允许有错误存在,否则会给软件生成带来错误。
b) 软件生成(菜单上:Generators->AP->Code Functions only)
软件代码用做生成包括自动功能和功能调用的程序功能块,功能调用定义了程序功能块调用的顺序,而且通过代码生成,建立了数据功能块的地址和分配。
有不同的软件生成方法:(有选项选择部分代码的生成)。
? 每个自动系统的生成:生成相应自动系统的代码。
? 每个功能区或标识号的生成:仅生成名称标识号对应的整个程序块的代码,用于生成修改过的程序块的代码。
? 功能调用组的生成:仅生成功能调用。
c) 自动系统代码离线传送(菜单上:Transfer->AP->Load AP (offline) )
首先系统检查代码有无错误,如果有错的话,它提示你出错的名称标识号,并要求你确认传送信息。虽然可以下传,但我们必须清楚仅是那些没有错误的程序块才被下载下去。
在下载过程中,自动处理器停下来。
2.4.2 在线传送的代码生成(菜单上:Generators->AP->Code generation for transfer)
生成修改过的功能,产生新的功能调用。在线代码也是为而下载生成的代码,只是无需中断自动系统和过程的联结而下载下去。
如果做了硬件的修改,系统先执行相应的部分代码生成,而不需要菜单上起动硬件生成。
可以选择或不选择在线处理,这意味着代码无误的情况下,开始在线下载或不下载。
2.4.3 网络代码生成(TXP菜单上:Generators->LAN)
生成局域网数据,也就是生成通讯处理器和通讯有关的DX140部分的数据,而且分配自动设备的接收和发送功能块。
网络代码生成仅用在网络组态修改后和全清掉了自动系统的代码后。
2.4.4 下载和传送功能
a) 离线传送(TXP菜单上:Transfer->AP->Load AP(offline)
第一次的代码下载需要做离线传送。也就是件和软件生成的代码的离线传送意味着下载了生成的全部硬件和软件代码。
b) 在线传送(TXP菜单上:Transfer->AP->Load AP(online) )
接下来的硬件修改、逻辑修改可以在线传送,但有些修改不能在线传送,必须离线传送,如增加新图到已
下载的程序块里。(从存在的程序块包删去已有功能在线传送是可以的,但绝不允许在线增加新的功能);安装或删除功能块,会重新定位到别的处理帧上,但从一个周期改变到另一周期是可以的。
c) 调试服务和其它支持功能
当所有图形生成并代码下载后,自动系统就能够完成自动功能了,工程师站ES680提供了下列在线功能:? 动态功能图,在功能图在线操作时,可以观察模拟量和开关量的值。这是调试和其它测试过程中重要的性能,无需借助额外接线元件或编程设备即可完成。
? 快速修改参数:任何功能块参数表可以通过菜单’Entry – request for confirmation – confirmation’在线生成并下载到自动处理器里。
? 模拟过程值并且预设在传感器故障情况下的缺省值,无需硬件上的任何模拟。
2.5 功能图FUP编辑器
功能图FUP编辑器用来生成功能图,也就是在图形上安排功能块的位置,并把功能块的输入和输出一行行连接,输入输出与其它功能块的输入输出的连接是在功能图左右两边的表格里完成的,另外FUP编辑器里还能定义各种功能块的过程工程参数和数值。
必须具备了一定的自动系统的知识才能做FUP编辑器下的工作。
2.5.1 起动功能图FUP编辑器(TXP菜单上:Edit->FUP-Editor)
需要至少一分钟启动此菜单。
2.5.2 功能图编辑器菜单
A.编辑菜单:图形编辑操作用的菜单
B. 图形管理菜单
2.5.3 操作
最通常的功能图设计步骤如下:
A. 生成一幅新的功能图
FGC:功能子组
DTK: 图类型(YFH、YFM、YFR、YDH、YDM、YDR、YOP、YOM、YOR)Diagram ID-code:图形的KKS或标识号
Designation:图形标识号的文本说明
sign :没有意义
page no :不需要填,系统自动为第一页注上号码”1”
dyn. FUP at OM :是用来显示动态画面,这要在整个逻辑完成后定义才有意义。
B. 打开一幅功能图
在第一个小窗口里,可以用通配符“*”和“?”定义选项标准,第二个窗口里显示的就是选择项清单,但必须选择一种图形类型。
YF 软件图
YFH 软件概貌图
YFM 闭环回路控制和开环回路控制概貌图YFR 详细软件图
YD 硬件图
YDH 拓扑图
YDM 机柜图
YDR 模件分配图
YOP 报表组态图
YOM 过程功能图的时序安排图
YOR 过程功能图
* 选择所有类型的图
C. 从模块库中选择一个模块
D. 设置模块参数
1. 2. 3. 4. 5. 6.
注解:
1. I :代表输入;
O:代表输出;
P:参数,
2. 是否显示参数值,当此按钮按下后,图形上显示参数值,
3. 是否激活信号内部带时间标签的数据,有些信号缺省定义是激活状态。每一个带时间标签的数据
都由某一个处理单元PU处理。通过模块上的OM接口,内部的信号和PU建立起通讯关系,这个接口往往和OM的某幅画面对应。
4. 参数值,
5. 接口的定义:
SF:基本图符的静态接口;
P:不能被激活的参数;
PF:所选区域的内容,PF/SF:参数和外部连接的切换;--/SF:激活I/O接口;
6. 输入/输出接口在功能块上的位置。
E. 生成信号名
每一个带时间标签的数据都要经过处理单元PU处理。模件内部产生的带时间标签的数据,模件和操作监视画面上的连接建立了和相应处理单元的关系。
外部带时间标签的数据,即由逻辑产生的,不得不为它定义信号名,手动建立它与处理单元PU的关系。功能图与功能图之间的连接同样也需要信号名。
信号名由电厂规定好了,包括四个字符,两字母两数字。
当信号定义的时候生成信号名,下面逐步解释如何生成信号名:
1) 点中模块的输出定义信号;
2) 按住鼠标中键不放,从选项中选择“Create connection”,再放开;
3) 拉着鼠标无需按键往右拖到表格栏,按住左键,释放掉,中键选中“positive signal”;
4) 有些模块的端口有其缺省定义,如开反馈信号名总是XB01,但这可以修改。键入“SIGDEF”后选择
“OK”;
5) 在下面出现的窗口里,可以定义更多有关信号名的信息,“setting”是对这幅图功能的简短说明,若是
模拟量,在“units”里加上单位,有时需要在“dest”里定义该信号在哪个处理单元处理。
F. 图与图之间建立连接
第一部分(信号源)
在信号源图形上产生这个信号源:
Fup 菜单上:Diagram->Open (打开信号源图)
为了在自动系统里做逻辑,图与图之间需信号连接,操作步骤如下:(这里仅描述完成连接的过程,顺序不限如此)
先在信号源上定义信号名,步骤如上3.3.5所述:
1) 点中模块的输出定义信号;
2) 按住鼠标中键不放,从选项中选择“Create connection”,再放开;
3) 拉着鼠标无需按键往右拖到表格栏,按住左键,释放掉,中键选中“positive signal”;
4) 有些功能块的端口有其缺省定义,如开反馈信号名总是XB01,但这可以修改。键入“SIGDEF”后选
择“OK”;
5) 在下面出现的窗口里,可以定义更多有关信号名的信息,“setting”是对这幅图功能的简短说明,若是
模拟量,在“units”里加上单位,有时需要在“dest”里定义该信号在哪个处理单元处理。
把刚定义好的信号送到目的图形上:
1) 点中要连接的信号;
2) 按住鼠标中键不放,从选项中选择“Create connection”,再放开;
3) 拉着鼠标无需按键往右拖到输出表格栏,按住左键,释放掉,中键选中“positive signal”;
4) 在“dest. ID-code”一栏里填入目标图的名称和信号目的地后选择“OK”;
5) 在下面出现的窗口里,显示刚刚填入的目标图的名称和这个源信号的所有定义即“SIGDEF”;在
“Y-setting”区域里,可以写上该信号在目标图上的功能,如“EN ON”在目标图上这个信号被送到驱动器允许启动的条件上;
6) 之后,保存、关闭这幅图,打开带有相关信息的目标图。
Fup 菜单上:Diagram->Save&Close
第二部分(目的信号)
在目的图形上取这个信号:
Fup 菜单上:Diagram->Open (打开目标图)
现在已经打开了目标图,下面的步骤用来在目标图上绘出和源图上生成的输出的连接:
1) 按住鼠标中键不放,在输入表格里从选项中选择“Create connection”,再放开;
2) 拉着鼠标无需按键往右拖到模块输入端或要连接的合适位置,完成连接;
3) 之后,出现一个可以直接填入源图名称和信号的窗口,但既然前面已经建立了源图和目标图的连接,
在这里选择“select”即可;
4) 清单上显示所有要送到这幅图但还没连接的信号,在其中只需选择相应的信号后,按“OK”;
5) 接下来的窗口里显示了和这个信号有关的所有信息。
这样,就把两幅图给连接了起来。
6) 之后,保存、关闭这幅图,打开带有相关信息的目标图。
Fup 菜单上:Diagram->Save&Close
G. 在同一幅图里不同的页上建立连接
有时需要在同一幅图的不同页的两个功能块上建立连接,这样需要在源头页上产生一个带名字的断点,在目标页上用相同名命名另一个断点即可以取到源头页上定义的了。
1) 点中需要的信号;
2) 按住鼠标中键不放,从选项中选择“Create connection”,再放开;
3) 拉着鼠标无需按键往下拖到合适的位置,中键选中“positive signal”,再放开,图上会出现一个“V”,
这意味着是没有连接的断点;
4) 选中断点,按下左键;
5) 按住中键,在“Parameter”后面出现又一个菜单,在选择了“Edit connector”后,放开键;
6) 填上断点的名称;
7) 转到目标页上;Fup 菜单上:Page->Goto page
8) 按住鼠标中键不放,从选项中选择“Create connection”,再放开;
9) 拉着鼠标无需按键往下拖到要连接的合适位置,中键选中“positive signal”,再放开,完成连接;
10) 选中断点,按下左键;
11) 按住中键,在“Parameter”后面出现又一个菜单,在选择了“Edit connector”后,放开键;
12) 填上断点的名称,按“OK”;
13) 按住鼠标中键不放,从选项中选择Refresh”,再放开。如果操作正确,应该在信号的旁边显示它是从
第几页上来的,否则断点名称有误。
H. 分配自动系统号和运行周期
1) 每幅图的分配
打开图,在菜单窗口里选择自动系统号和运行周期。
GC是背景周期,不是一个固定周期时间,
C1或Z1是100ms周期,
C2或Z2是200ms周期,
C3或Z3是400ms周期,
C4或Z4是800ms周期,
C5或Z5是1600ms周期,
C6或Z6是3200ms周期,
C7或Z7是6400ms周期,
C8或Z8是12800ms周期。
2) 整个系统程序块的组织
打开系统拓扑图(YDH)
所有的YFR功能图都在程序块(PB)里组织,安排在同一个程序块里的YFR功能图都在同一个周期里运行,这就是为什么同一个程序块里的所有YFR功能图需要安排相同的时间周期。每个自动系统至多256个程序块。
不允许在旧的程序块里在线增加新图,为了在线增加新图,必须在自动系统里产生一个新的程序块。
I. 模件分配和模件通道分配
3 OM650 操作和监视系统的组态
3.1 OM650硬件
OM 650提供了一个分层的结构形式:
§ 处理单元:包括处理器(PU)和服务器(SU)
§ 输入和输出单元:操作终端(OT)
OM650的各部分通过终端总线进行通讯。
OM650硬件概念是分散的终端总线系统,
它使OM650适用于各种类型的电厂;
它提供了高度的可用性;
它适用于各种类型集控室的设计。
3.2 处理单元(PU)
3.3 特性
PU完成过程控制和信息处理的功能,每个电厂至少配置一台PU,实际上总的处理能力,是由电厂不定的几台PU所决定的。
PU 的主要任务是:
§ 保留所负责功能区里的当前值或状态的映像(ASR);
§ 把所负责功能区里的数据变化进行短期存储 (ARC);
§ 建立开关量状态信息和普通的状态变化的关系(MAC);
§ 处理过程信息(PF);
§ 完成计算(PF);
§ 提供操作员终端OT上的信息;
§ 提供SU上进行长期存储的信息。
每一台PU既连在电厂总线上又接在终端总线上,提供PU冗余配置。
3.4 服务单元(SU)
3.5 特性
SU的主要任务是:
§ 长期存储
§ 报表
§ 文本描述
SU和PU 及操作终端的通讯是通过终端总线完成的。
另外,如果PU的功能(过程控制和信息)安装在提供了足够处理能力的SU里,则称为PU/SU。
如果是PU/SU,就必须同时要连在电厂总线上了。
至少需要一个光盘驱动器来进行外部数据存储和数据分析用。
提供SU冗余配置。
3.6 操作终端(OT)
3.7 特性
操作终端(OT)的主要任务是:
§ OT包含全部的OM650用户界面,提供DCS和操作员之间的人机接口
§ 保存所有的电厂流程画面
OT通过终端总线获得短期和长期存储数据,因此完成对整个电厂的操作和监视功能。
3.8 图形服务器(MXT Terminal)
图形服务器可带
§ 1个通道
§ 2个通道
§ 3个通道
§ 4个通道
通过对图形服务器的组态,通道数决定可连接的显示器的数量。
3.9 OM650 软件
OM 650是几个子部分组成的,这些子部分由软件对象管理着,这些软件在不同的机器上运行,这些机器安装着基于对象导向的软件。
OT:操作终端
§ MMI-人机接口
PU:处理单元
§ ASR-与自动系统的连接
§ MAC-模块的管理和控制(计算、报警处理功能(processing functions and ASD ))
§ ARC-短期存储
SU:服务器单元
§ BDM-文本的管理和存储
§ LZA-长期存储
§ PRT-报表
§ NTB-笔记本记事功能
对于一般的用户来说,模块MMI、MAC、BDM(processing functions部分)、PRT需要工程组态,
而其它的模块ASR、MAC(ASD部分)、ARC、LZA不需要什么工程数据,但是出厂前需设置一些参数,参数要改必须由系统管理员来完成,需要修改的参数文件分别是Arc.proj、Meld.proj、Arc.proj、Lza.proj。
3.10 报表
根据不同的类型,各种报表过滤出相应的带有标题和说明的数据,报表快速完整地提供了电厂现在和过去的状态。
有下面几种类型的报表:
q OM可组态报表(OT上在线组态)
? 状态报表
? 顺序记录报表
q 工程师站组态报表(ES680上 FUP-Editor下事先组态好的报表)
? 状态报表
? 顺序记录报表
? 事故追忆报表
q 在线报表(标准的)
有三种方法可以激活报表:
q 在OT上的报表菜单下选择操作;
q 定点激活;
q 事件触发激活。
3.11 MAC:计算、报警处理功能(processing functions and ASD ) 3.12 存储
3.13 OM组态
OM的组态是在工作站ES680上完成的,首先需要用户口令,有足够的权限才能修改软件。
OM的硬件组成是在FUP-Editor的拓扑图里定义的。
所有的电厂画面在人机接口编辑器MMI- Editor里产生。
事先组态的报表和MAC的计算功能是在FUP-Editor里完成的。
当组态完成,需要把程序或修改生成,当且仅当代码无误的情况下,系统才允许下载代码。
3.13.1 人机接口编辑器MMI-Editor
MMI-Editor里生成两种类型的画面:YOA和YOV。
YOA画面是电厂流程画面即过程仿真图,YOV则是过程画面,即趋势曲线、棒状图。
静态画面完成后,信号连接即把功能图上的信号送到OM画面上来。只有那些在功能图上明确定义分配给OM的信号才能被连接上。
人机接口编辑器MMI-Editor的工作步骤:
q 图形组态步骤:
步序工作步骤MMI-Editor上的菜单选择
1 数据库里生成画面display->create display
2 生成静态画面process->create graphic->PicEdit
3 定义画面层次结构process->Hier. plant display
4 过程连接process->process connection
并不是所有的DYNAVIS工具PicEdit是用来编辑画面的,因为TELEPERM XP已经有了一些惯例和标准。DYNAVIS-X是通用的过程可视系统,它通过特殊的方式适应不同用户的处理系统。对于TELEPERM XP 它的目标是通过最少量的组态实现最可能的操作和监视。
DYNAVIS-X系统包括两部分:
? 在线部分(已安装在OT的OM软件里);
? 离线部分,与工作站ES680合成一体,用来编辑画面。
对象的逻辑存在于对应的数据接口里,在第四步过程连接里,动态显示的对象和自动系统里的模块建立了相应的逻辑关系。
不仅仅是功能图上的数据,经过处理功能之后(从MAC来)的数据也可以在画面上显示。
q 生成和下载:
步序工作步骤MMI-Editor上的菜单选择
5 生成目的地或手动生成和功能图的连接Edit->Generate Diagram->Generate Destinations
6 生成画面MMI Generators->OM->MMI
7 生成动态功能图dyn.OM-FUP Generators->OM->Dynamic FUP
8 生成文本BDM Generators->OM->BDM
7 生成过程计算(Processing Functions) Generators->OM->Processing Functions
8 生成报表Protocols Generators->OM->Protocols
9 下载Inf Transfer->OM->Inf
10 下载画面MMI Transfer->OM->MMI Picture (OT)
11 下载动态功能图dyn.OM-FUP Transfer->OM->MMI FUP (OT)
12 下载文本BDM Transfer->OM->BDM (SU)
13 下载与自动系统耦合的文件ASR Transfer->OM->ASR (PU)
14 下载过程计算(Processing Functions) Transfer->OM-> Processing Functions(PU)
15 下载报表Protocal Transfer->OM->Protocal (PU)
在开始MMI-Editor的工作之前,你需要具备一定的自动系统AS和操作监视系统OM的知识。
3.13.2 起动MMI-Editor
TXP菜单上:Edit->MMI-Editor,需要至少20秒钟起动此菜单。
A.MMI-Editor上的菜单
B. 数据管理菜单
C. 处理菜单
处理
最常用的组态步序如下:
a) 定义一幅新的画面
FC:画面的功能区号;
DTK: YOA(电厂画面)
YOV(过程画面);
Display ID-code:名称标识号;
Designation:说明;
Menu text:菜单上的文本;
Window type:窗口类型。
b) 在画面层次结构里加入画面
整个电厂画面(YOA)层次结构里必须有一幅概貌图,过程画面(YOV)层次结构里有一幅概貌图。
因为概貌图不需要分配功能区号(FB),所以在产生概貌图时可以任意定义功能区代码,画面的层次定义菜单是在MMI-Editor下的Process->Hier.plant或Hier.process displays里。
c) 画图或修改图
新图定义之后,自动生成一幅空的画面。在PicEdit里的路径/MMI_PRO/ “FC”/ “DTK”/ “KKS”下画图或修改,每一个图符元素都是从标准图符库里调出来的。
q PicEdit
里鼠标各键的功能
三种鼠标键功能:
? 单击:短暂地按下鼠标键 ? 双击:点击鼠标键两下
? 按住拖动:按下,保持住并拖动鼠标键 PicEdit 里鼠标画图的功能 PicEdit 里鼠标的功能:
PicEdit 里鼠标键配合
键的功能:
单击
扩展选项
隐藏
--
单击 选择 显示 -- 双击 打开 复制 -- 按住拖动
移动
改变
菜单选择
编订:__________________ 审核:__________________ 单位:__________________ 电梯的电气控制系统设计 与实现 Deploy The Objectives, Requirements And Methods To Make The Personnel In The Organization Operate According To The Established Standards And Reach The Expected Level. Word格式 / 完整 / 可编辑
文件编号:KG-AO-7382-100 电梯的电气控制系统设计与实现 使用备注:本文档可用在日常工作场景,通过对目的、要求、方式、方法、进度等进行具体的部署,从而使得组织内人员按照既定标准、规范的要求进行操作,使日常工作或活动达到预期的水平。下载后就可自由编辑。 电梯是当前高层建筑不可缺少的垂直方向的交通运输工具,随着计算机及微电子技术的快速发展,电梯控制技术发生了巨大变化,其中PLC控制系统代替传统的继电器控制以及电梯采用了对电动机实现线性调速的调压调频技术,能达到电梯安全平稳运行。 随着人们生活水平的提高及高层建筑的普及,电梯是当前高层建筑不可缺少的垂直方向的交通工具,电梯是集机电一体的复杂系统,涉及机械传动、电气控制和土建等工程领域多种领域专业与一体的综合技术。随着社会的发展及对安全的重视,在设计电梯的时候,应具有高度的安全性。这样就对建筑内的电梯的调速精度、调速范围等静态和动态特性提出了更高的要求。当前由可编程序控制器(PLC)和微机组成的电梯运行逻辑控制系统具有可靠性高、维护方便、开发
1-3自动控制系统的分类 本课程的主要内容是研究按偏差控制的系统。为了更好的了解自动控制系统的特点,介绍一下自动控制系统的分类。分类方法很多,这里主要介绍其中比较重要的几种: 一、按描述系统的微分方程分类 在数学上通常可以用微分方程来描述控制系统的动态特性。按描述系统运动的微分方程可将系统分成两类: 1.线性自动控制系统描述系统运动的微分方程是线性微分方程。如方程的系数为常数,则称为定常线性自动控制系统;相反,如系数不是常数而是时间t的函数,则称为变系数线性自动控制系统。线性系统的特点是可以应用叠加原理,因此数学上较容易处理。 2.非线性自动控制系统描述系统的微分方程是非线性微分方程。非线性系统一般不能应用叠加原理,因此数学上处理比较困难,至今尚没有通用的处理方法。 严格地说,在实践中,理想的线性系统是不存在的,但是如果对于所研究的问题,非线性的影响不很严重时,则可近似地看成线性系统。同样,实际上理想的定常系统也是不存在的,但如果系数变化比较缓慢,也可以近似地看成线性定常系统。 二、按系统中传递信号的性质分类 1.连续系统系统中传递的信号都是时间的连续函数,则称为连续系统。 2.采样系统系统中至少有一处,传递的信号是时间的离散信号,则称为采样系统,或离散系统。 三、按控制信号r(t)的变化规律分类 1.镇定系统() r t为恒值的系统称为镇定系统(图1-2所示系统就是一例)。 2.程序控制系统() r t为事先给定的时间函数的系统称为程序控制系统(图1-11所示系统就是一例)。 3.随动系统() r t为事先未知的时间函数的系统称为随动系统,或跟踪系统,如图1-7所示的位置随动系统及函数记录仪系统。
四层电梯控制系统设计-
————————————————————————————————作者:————————————————————————————————日期:
电气与电子信息学院 课程设计说明书 课程名称:电气控制技术与PLC课程设计题目:四层电梯控制系统设计 专业:电气工程及其自动化
年级:2014 学生: 学号: 指导教师: 完成日期:2018年 1 月 5 日 四层电梯控制系统设计 摘要:本设计采用FX2设计了四层电梯的控制系统,详细进行了参数计算,空气开关、接触器等诸多电器的选型,对主电路、控制回路进行了接线与保护。 控制PLC系统FX2N由于体积小,重量轻,能耗低,运行可靠性高,抗干扰能力强,使用维修方便,系统的设计、安装、调试工作量小,容易改造,设计和调试周期较短等优点被我们选择,在控制过程分析基础之上采用或顺序控制法编写了梯形图程序,程序调试通过,实现了控制要求。最终在易控组态的的开发环境上我们模拟成功了四层电梯的控制。 关键词:PLC ,四层电梯, FX2N
目录 1前言.................................................. 错误!未定义书签。2总体方案设计 .......................................... 错误!未定义书签。 2.1 方案1.............................................. 错误!未定义书签。 2.2 方案2 (2) 2.3 方案选择............................................ 错误!未定义书签。3硬件设计.. (3) 3.1电梯简介 (3) 3.1.1 电梯的发展简史 (3) 3.1.2 电梯系统的基本结构 ....................................... 错误!未定义书签。 3.1.3电梯控制系统的组成 (5) 3.2硬件选择 (5) 3.3三菱FX2N型PLC (6) 3.3.1 基本介绍 (6) 3.3.2 基本指令系统特点 (7) 3.3.3 FX2N产品的编程原件及其功能 (7) 3.4主电路图与接线图 (10) 3.4.1 主电路图 (10) 3.4.2 电梯控制信号原理 (11) 3.4.3 I/O分配表 (12) 3.4.4 PLC端口接线图 (13) 3.5控制面板设计 (14) 4软件设计 (15)
Safety is the goal, prevention is the means, and achieving or realizing the goal of safety is the basic connotation of safety prevention. (安全管理) 单位:___________________ 姓名:___________________ 日期:___________________ 电梯的电气控制系统设计与实现 (通用版)
电梯的电气控制系统设计与实现(通用版)导语:做好准备和保护,以应付攻击或者避免受害,从而使被保护对象处于没有危险、不受侵害、不出现事故的安全状态。显而易见,安全是目的,防范是手段,通过防范的手段达到或实现安全的目的,就是安全防范的基本内涵。 电梯是当前高层建筑不可缺少的垂直方向的交通运输工具,随着计算机及微电子技术的快速发展,电梯控制技术发生了巨大变化,其中PLC控制系统代替传统的继电器控制以及电梯采用了对电动机实现线性调速的调压调频技术,能达到电梯安全平稳运行。 随着人们生活水平的提高及高层建筑的普及,电梯是当前高层建筑不可缺少的垂直方向的交通工具,电梯是集机电一体的复杂系统,涉及机械传动、电气控制和土建等工程领域多种领域专业与一体的综合技术。随着社会的发展及对安全的重视,在设计电梯的时候,应具有高度的安全性。这样就对建筑内的电梯的调速精度、调速范围等静态和动态特性提出了更高的要求。当前由可编程序控制器(PLC)和微机组成的电梯运行逻辑控制系统具有可靠性高、维护方便、开发周期短,对机械零部件和电器元件都采取了很大的安全系数和保险系数。电梯的控制是相对比较复杂的,PLC可编程控制器把机械与电气部件有机地结合在一个设备内,把仪表、电子和计算机的功能综合在一起,使得
六层电梯控制系统设计 指导教师:张强 2008级电气自动化专业学号 200812042 姓名杨海龙 摘要 本文介绍一种电梯PLC控制系统。电梯是垂直方向的运输设备,是高层建筑中不可缺少的交通运输设备。它靠电力,拖动一个可以载人或物的轿厢,在建筑的井道内导轨上做垂直升降运动,在人们生活中起着举足轻重的作用。而控制电梯运行的PLC系统也要求越来越高,要求达到电梯运行的“稳、准、快”的运行目的。该系统主要由PLC、逻辑控制电路组成。其中包括交流异步电动机、继电器、接触器、行程开关、按钮、发光指示器和变频器组成为一体的控制系统。本机控制单元采用以西门子公司的可编程控制器PLC对机器进行全过程控制。 整个系统通过PLC、逻辑控制电路对电梯的升降;加、减速;平层;起动、制动控制。其结构简单、运行效率高、平层精度高、易于理解与掌握。 关键词:PLC控制系统;电梯;逻辑控制电路;变频器
2 Six elevator control system design Tutor: Qiang Zhang Electric automation level2008 No.200812042 Name: Hailong Yang Abstract This text introduces the control system of a kind of elevator PLC.The elevator is perpendicular directional of the conveyance equipments be indispensable in the high building of transportation equipments.It depends electric power, dragging along to move a car that can carry person or thing and lead a track in the building of the well way up do perpendicularity to ascend and descend sport, there is prominent function in the people's life.And the control elevator circulate of the PLC system also has more and more high request, request to attain the movement purpose of "steady, quasi-, quick" of elevator movement.That system mainly from PLC, logic control the electric circuit constitute.Include an exchanges difference to tread electric motor among them, after the electric appliances, get in touch with a machine, route of travel switch and press button, give out light the indicator constitute and transducer for the control system of integral whole.The this machine control unit adoption carries on whole process a control to the machine by the programmable controller PLC of SIEMENS company. The whole system passes PLC, logic control the electric circuit is to the rise and fall of elevator;Add, decelerate;Even layer;Start, make to move a control.Its structure is simple and circulate an efficiency, even layer accuracy, be easy to comprehension and control. Key Words:The PLC controls system elevator;The logic controls;electric circuit transducer
四层电梯的自动控制系统及模拟系统设计
陕西国防工业职业技术学院 SHAANXI INSTITUTE OF TECHNOLOGY 毕业设计说明书 题目四层电梯的自动控制系统及模拟系统
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段
保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
上海四景计算机信息科技有限公司 电 梯 控 制 系 统 方 案
上海四景计算机信息科技有限公司 舒特电梯智能控制系统 ---楼宇自动化的首选 前言: 系统概述: 随着高科技的蓬勃发展,智能化管理已经走进了人们的生活。物业管理公司或管理人员为了能对楼宇内各种人员的进出进行更有效、更安全的管理,有效的控制闲杂人员的进入,可以通过采用对电梯的合理控制实现这种功能需求。所有的电梯楼层,都必须先经过系统管理员授权。使用电梯时,不同的人有不同的权限分配,每个进入电梯的人经过授权可以进入指定的区域或楼层,并且可以根据时间表进行授权管理。未经授权,无法进入管理区域的楼层,并对重要楼层进行时间段控制。控制器不管是脱机运行还是联机控制,都可记录大量的交易数据,使得电梯的所有人员进出记录都有据可寻。针对这些需求我们开发了电梯楼层控制器,并分为手动型和自动型两款,客户可以根据需求选择适合自己的产品。 通过智能卡管理电梯运行,可将闲杂人员阻止在电梯之外;同时,又起到了电梯省电省空耗的环保作用;也减少了出现电梯按键失灵的情况;延长了电梯使用寿命;加强了传统安全管理系统中管理的薄弱的一面;提高了物业的安全等级,电梯系统智能化控制已逐渐成为智能化建筑楼宇中必不可少弱电系统之一 二、选择使用电梯控制系统带来的好处 (一)使用梯控制系统可有效的控制闲杂人员的进入,可以通过采用对电梯的合理控制实现各种功能需求。 (二)使用梯控制系统能够提高楼盘的整体智能化程度,提升楼盘亮点和档次,充分体现智能化楼宇和智能化小区意义,是楼盘更具附加值。 (三)使用梯控制系统能够使公共电梯轻松晋级为私有电梯,能够让业主充分体现私有电梯的尊贵和方便性。 (四)使用梯控制系统能够为用户提供更方便和更公平使用。 (五)协助收取物业费 管理人员可对系统的用户卡设定使用权限,设定失效日期,便于控制管理费用的收取。 如用户使用到达使用的失效时间,则不能开梯,提醒并促使用户到达管理处及时缴费,对于不按时交纳物业费的业主,则不能使用电梯,有效的将管理费用与用户使用权限挂
分散控制系统(DCS)详细介绍 一、系统概况: 1.DCS系统的特点DCS系统也称分布式控制系统,其实质是计算机技术对生产过程进行集中监视、操作、管理和分散控制的一捉新型控制技术。其功能特点是:通用性强、系统组态灵活、控制功能完善、数据处理方便、显示操作集中、人机界面友好、安装简单规范化、调试方便、运行安全可靠等。 2.分散控制系统的构成作为一种纵向分层和横向分散的大型综合控制系统,它以多层计算机网络为依托,将分布在全厂范围内的各种控制设备的数据处理设备连接在一起,实现各部分信息的共享的协调工作,共同完成控制、管理及决策功能。1)其硬件设备由管理操作应用工作站、现场控制站和通信网络组成。 管理操作应用工作站包括工程师站、操作员站、历史数据站等各种功能服务站。A.工程师站提供技术人员生成控制系统的人机接口,主要用于系统组态和维护,技术人员也可以通过工程师站对应用系统进行监视。B.操作员总理提供技术人员与系统数据库的人机交互界面,用于监视可以完成数据的状态值显示和操作员对数据点的操作。C.历史站保存整个系统的历史数据,供组态软件实现历史趋势显示、报表打印和事故追忆等功能。现场控制站用于现场信号的采集处理,控制策略的实现,并具有可靠的冗余保证、网络通信功能。通信网络连接分散控制系统的各个分布部分,完成数据、指令及其它信息的传递。为保证DCS 可靠性,电源、通信网络、过程控制站都采用冗余配置。2)分散控制系统的软件是由实时多任务操作系统、数据库管理系统、数据通信软件、组态软件和各种应用软件组成。3)分散控制系统在结构上采用模块化设计方法,通过灵活组态,合理的配置,可以实现火电机组的模似量控制系统(MCS)、数据采集系统(DAS)、锅炉燃烧控制和炉膛安全系统(FSSS)、顺序控制系统(SCS)等功能。 3.名词术语解释DCS分散控制系统指控制功能分散、风险分散、操作显示集中、采用分布式结构的智能网络控制系统。DAS数据采集系统指采用数字计算机控制系统对工艺系统和设备的运行参数、状态进行检测,对检测结果进行处理、记录、显示和报警,对机组的运行情况进行运算分析,并提出运行指导的监视系统。MCS模拟量控制系统指通过控制变量自动完成被控制变量调节的回路。CCS协调控制系统指将锅炉-汽轮发电机组作为一个整体进行控制,通过控制回路协调锅炉汽轮机在自动状态下运行给锅炉、汽轮机的自动控制系统发出指令,以适应负荷变化的需要,尽最大可能发挥机组的调频、调峰的能力,它直接作用的执行级是锅炉燃料控制系统和汽轮机控制系统。SCS顺序控制系统指对火电机组的辅机及辅助系统,按照运行规律规定的顺序(输入信号条件顺序、动作顺序或时间顺序)实现启动或停止过程的自动控制系统。FSSS炉膛安全监控系统指对锅炉点火和油枪进行程序自动控制,防止锅炉炉膛由于燃烧熄火、过压等原因引起炉膛爆炸(内爆或外爆)而采取的监视和控制措施的自动系统。其包括燃烧器控制系统BCS和炉膛安全系统FSS。AGC自动发电控制,根据电网对各电厂负荷要求对机组发电功率由电网调度进行自动控制的系统。MFT总燃料跳闸指保护信号指令动作或由人工操作后,快速切断进入炉膛的所有燃料而采取的措施。DEH 汽轮机数字式电液控制系统,是按电气原理设计的敏感元件、数字电路以及按液压原理设计的放大元件和液压伺服机构构成的汽轮机控制系统。ATC或ATSC汽轮机自启动,根据汽轮机的运行参数和热应力计算,使汽轮机从盘车开始直到带初负荷按程序实现自启动。 OPC超速保护控制功能,是一种抑制超速的控制功能,常见有以下两种:i.当汽轮机转速达到额定转速的103%时,自动关闭中、高压调节汽门;当转速恢复正常时,开户这些汽门以维持额定转速。ii.当汽轮机转速出现加速度时,发出超驰指令,关闭高、中压调速汽门;当加速度为0时由正常转速控制回路维持正
电梯plc控制系统的组态模拟设计 摘要:本文介绍了利用西门子S7-200可编程控制器编写的一个四层电梯的控制系统,利用MCGS组态软件制作人机对话界面,检验电梯PLC控制系统的运行情况。实践证明,PLc可遍程控制器和MCGS组态软件结合有利于PLC控制系统的设计、检测,具有良好的应用价值。 电梯plc控制系统的组态模拟设计: 3电梯PLC控制系统设计 因篇幅有限。仅将电梯指示及上下行程序列出说明。 3.1楼层状态指示设计 当电梯运行至某层有指令发出时.指示位置及指令。以二层为例: LDtwoselet 二层内选掸 Stwoseletq,1 二层内选择指示 LDtwoup 二层上呼 Stwoupq,1 二层上呼指示 LJ)twodown 二层下呼 Stwodownq,1 二层下呼指示 LDtwoseat 二层位置 =twoeeatq 二层位置指示 3.2电梯下行程序设计 以电梯在三层下行情况为例。当电梯的一或二层有指令时,将三层下行位置1,同时无上行,驱动电梯下行。程序说明如下: 电棒在三晨时下行情况 LDoneseletq 一层内选择 0twmeletq 或二层内选择 Ooneupq 或一层上呼 0twodownq 或二层下呼 OtWoup_q 或二层上呼 A畦I州eseatq 在三层位置时
SV0.1.1 置三层下行位 电椿下行 LDV0.0 有四层下行位 OV0.1 或有三层下行位 OV0.2 或有二层下行位 ANup 同时无上行 =down 电梯下行 3.3电梯上行程序设计 以电梯在二层上行情况为例。程序说明如下: 3.4电梯到达时程序设计 电梯到达某层时。将已完成的指令信号复位。以电梯到达三层为例。程序ig明如下: 4组态软件模拟电梯PLC控制系统显示设计 MCGsm态软件具有全中文、面向窗口的可视化操作界面。实时性强,有良好的并行处理性能和丰富生动的多媒体画面。MCGSm态软件的开放式结构拥有广泛的数据获取和强大的数据处理功能。同时。提供良好的安全机制,为多个不同级别用户设定不同的操作权限。MCGS 组态软件支持多种硬件设备,实现“设备无关”,用户不必因外部设备的局部改动,而影响整个系统。MCGS组态软件由“MCGS组态环境”和“MCGS运行环境”两个系统组成。两部分互相独立。又紧密相关。 本文利用MCGS组态软件设计。在设备组态窗口中选择适当的串口通讯设备.添加西门子S7—200PLC。正确设置其属性。正确设置组态软件中数据变量设备通道的连接,即可实现PLC与组态软件的通讯。将PLC中的串口驱动程序与组态软件的需求响应相结合,使电脑对PLC发出的信号有响应。在MCGS组态软件的用户窗口中,制作一个动画界面。在界面上设置各个控件的属性,使设置的控件按照真实的情况动作,检验和测试电梯PLC控制系统对电梯的运行状态的控制效果。MCGS用主控窗口、设备窗口和用户窗口来构成一个应用系统的人机交互图形界面.组态配置各种不同类型和功能的对象或构构。可以对实时数据进行可视化处理。组态过程如图2所示: 5结语 针对这个四层电梯的控制系统.本文采用西门子S7—200可编程控制器设-H-电梯的控制系统完成电梯的轿内指令、厅外召唤指令、楼层位置指示、平层换速控制、开门控制等控制任务。利用MCGS组态软减设计模拟电梯PLC控制系统的运行。将PLC中的串口驱动程序与组态软件的需求响应相结合,加载驱动。使设置的控件能够按照真实的情况动作。检验和测试电梯PLC控制系统对电梯的运行状态的控制效果。实践证明。将PLC可编程控制器和MCGS 组态软件结合可以非常好地模拟电梯控制系统的测试运行.有利于PLC控制系统的设-H-、检测,具有良好的应用价值。 参考文献:
基于单片机的智能电梯控制系统设计
摘要 本文介绍了一种采用单片机STC89C52芯片进行电梯控制系统的设计方法,主要阐述如何使用单片机进行编程来实现四层电梯的智能控制,利用单片机编程简洁而又多变的设计方法,缩短了研发周期,同时使电梯控制系统体积更小功能更强大。本设计实现了电梯控制系统所需的一些基本功能,能通过电梯内按键或者电梯外上升、下降按键选择楼层,数码管显示实时楼层数,LED显示实时电梯运行状态。原理图和PCB部分采用protel99se专业软件来设计,实现将设计产品化。本次设计更注重了把一些新的思路加入到设计中。主要包括采用了STC89C52芯片,使用C语言进行编程,使其具有了更强的移植性,更加利于产品升级。 关键词:STC89C52;电梯控制系统;protel99se;C语言
Abstract This paper introduces a design method of using STC89C52 chip for elevator control system, mainly describes how to use microcontroller programming to achieve the intelligent four storey elevator control, the design method of microcontroller programming simple and variable, shortens the development cycle, at the same time that the elevator control system smaller and more powerful. Some of the basic functions of the design and implementation of elevator control system required by the elevator, elevator buttons or rise, decline the key to select the floor, digital tube display real-time number of floors, LED display real-time operating state of elevator. Schematic and PCB design using Protel99SE software, the design of products. This design pays more attention to some new ideas into the design. Including the use of the STC89C52 chip, the use of C language programming, which has portability stronger, more conducive to the upgrading of products. Keywords: STC89C52; elevator control system; Protel99SE; C language
电梯控制系统设计设计说明
第 1 页共 3 页 编号: 毕业设计说明书 题目:电梯控制系统设计 院(系):电子工程与自动化学院 专业:电子信息科学与技术专业 学生姓名: 学号:0900840218 指导教师:李莉 职称:讲师 题目类型:理论研究实验研究工程设计√软件开发 2013年5月20日
第 3 页共 39 页 摘要 本设计主要利用AT89S52单片机,实现电梯控制系统的设计。单片机与电机驱动电路的结合完成了电梯基本的升降、楼层停靠、方向选择、时间控制等基本功能,研究并实现了在上位机的模式下通过LABVIEW的远程监测的方法,完成了系统样机的设计与制作。 本设计参照了通用电梯的设计标准,有良好的操作界面和通用的外部接口,具有人性化设计,实现较好的外设兼容性。同时在系统样机中完成的其它设计研究还包括,利用LED和蜂鸣器组成的简单电路实现电梯意外声光报警、利用数码管实现电梯楼层显示,利用4x4矩阵键盘实现电梯楼层按键选择,利用LED实现目的楼层的指示,利用MAX232串口电路实现串口通信,来监测电梯实时状态。样机使用的主要器件包括低功耗、高性能的AT89S52单片机,低功耗、低成本、低电压的MAX232,双全桥电机专用驱动芯片L298,共阴极八段数码管,4x4矩阵键盘等,通过比较合理的设计使样机系统基本达到了任务要求,并具有很高的性价比,硬件设计简单可靠。软件部分使用keil软件进行C语言程序编写,用proteus 7软件进行仿真调试。本设计中综合使用了数字电路、模拟电路、高频电路、单片机及编程、硬件逻辑描述、LABVIEW及其应用以及计算机辅助设计(CAD)等多方面的知识,软硬件结合,很好地完成了本科毕业设计任务要求并取得了良好的学习效果。 关键词:AT89C52;单片机;电梯控制系统; C语言
组态控制技术与应用设计报告 课程名称:组态控制技术与应用 学院:电子电气工程学院专业:电气工程及其自动化班级:xxx 学号:xxx 姓名:xxx 设计题目: 上下位控制液位流 动 2012--2013学年 第 1 学期总评成绩: 时切断出具高中与规程电源高
一. 下位机控制(PLC ) 介绍PLC 控制器: PLC 的英文全称是:Programmable logic Controller ,可编程 逻辑控制器,一种数字运算操作的电子系统,专为在工业环境应用而设计的。它采用一类可编程的存储器,用于其内部存储程序,执行逻辑运算,顺序控制,定时,计数与算术操作等面向用户的指令,并通过数字或模拟式输入/输出控制各种类型的机械或生产过程。是工业控制的核心部分。PLC 控制器主要是指数字运算操作电子系统的可编程逻辑控制器,用于控制机械的生产过程。 1.1 题目控制要求: 1、十秒钟倒计时 2、通过阀门控制管道内液体流动 3、总开关控制反应罐液面上升和下降 4、通过组态按钮控制PLC 的操作 1.2 I/O 分配表: 输入 功能 输出 功能I0.1 进料启动按钮SB1 Q0.1进料管道阀门 I0.2 进料停止按钮SB2 Q0.2出料管道阀门 II0.3 出料启动按钮SB3 I0.4 出料停止按钮SB4 通过管线不仅对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行 高中资料试卷调整试验;通电检查所有设备高中资料试卷相互作用与相互关系,根据生产工艺高电力保护装置调试技术,电力保护高中资料
1.3 I/O接线图: 1.4 梯形图程序:
二.上位机监控界面(组态王) 组态软件介绍: 组态软件,又称组态监控软件系统软件。译自英文SCADA,即Supervisory Control and Data Acquisition(数据采集与监视控制)。它是指一些数据采集与过程控制的专用软件。它们处在自动控制系统监控层一级的软件平台和开发环境,使用灵活的组态方式,为用户提供快速构建工业自动控制系统监控功能的、通用层次的软件工具。组态软件的应用领域很广,可以应用于电力系统、给水系统、石油、化工等领域的数据采集与监视控制以及过程控制等诸多领域。 组态工程设计步骤介绍: 第一步,创建新工程 第二步,定义硬件设备并添加工程变量 第三步,制作图形画面并定义动画连接 第四步,编写命令语言 第五步,进行运行系统的配置 第六步,保存工程并运行
电气与电子信息学院 课程设计说明书 课程名称:电气控制技术与PLC课程设计题目:四层电梯控制系统设计 专业:电气工程及其自动化
年 级: 2014 学 生: 学 号: 指导教师: 完成日期: 2018年 1 月 5 日 四层电梯控制系统设计 摘 要:本设计采用FX2设计了四层电梯的控制系统,详细进行了参数计算,空气开关、接触器等诸多电器的选型,对主电路、控制回路进行了接线与保护。 控制PLC 系统FX2N 由于体积小,重量轻,能耗低,运行可靠性高,抗干扰能 力强,使用维修方便,系统的设计、安装、调试工作量小,容易改造,设计和调试周期较短等优点被我们选择,在控制过程分析基础之上采用或顺序控制法编写了梯形图程序,程序调试通过,实现了控制要求。最终在易控组态的的开发环境上我们模拟成功了四层电梯的控制。
目录 1前言................................................... 错误!未定义书签。2总体方案设计 ........................................... 错误!未定义书签。 2.1 方案1 ............................................... 错误!未定义书签。 2.2 方案2 (2) 2.3 方案选择............................................. 错误!未定义书签。3硬件设计.. (3) 3.1电梯简介 (3) 3.1.1 电梯的发展简史 (3) 3.1.2 电梯系统的基本结构 ...................................................... 错误!未定义书签。 3.1.3电梯控制系统的组成 (5) 3.2硬件选择 (5) 3.3三菱FX2N型PLC (6) 3.3.1 基本介绍 (6) 3.3.2 基本指令系统特点 (7) 3.3.3 FX2N产品的编程原件及其功能 (7) 3.4主电路图与接线图 (10) 3.4.1 主电路图 (10) 3.4.2 电梯控制信号原理 (11) 3.4.3 I/O分配表 (12) 3.4.4 PLC端口接线图 (13) 3.5控制面板设计 (14) 4软件设计 (15)
湖南文理学院 课程设计报告 课程名称:自动化系统课程设计专业班级:自动化11班学号 学生姓名: 指导教师: 完成时间:2014年11月20日报告成绩:
目录
一、设计题目 智能电梯控制系统设计 二、设计要求 利用PLC与变频器实现电梯的变频调速控制,该电梯控制系统具有同时呼梯控制、各楼层单独呼梯控制、上升、下降运行控制、轿厢位置显示等功能,电梯至少五层以上。 三、电梯控制系统控制系统设计作用与目的 随着我国经济的高速发展,微电子技术、计算机技术和自动控制技术也得到了迅速发展,电梯也已成为人类现代生活中广泛使用的运输工具。随着人们对电梯运行的安全性、舒适性等要求的提高,电梯得到了快速发展,其拖动技术已经发展到了调频调压调速,其逻辑控制也由PLC代替原来的继电器控制。 可编程控制器(PLC)因为稳定可靠、结构简单、成本低廉、简单易学、功能强大和使用方便已经成为应用最广泛的通用工业控制装置,成为当代工业自动化的主要支柱之一。电梯控制要求接入设备使用简便,对应系统组态的编程简单,具有人性化的人机界面,配备应用程序库,加快编程和调试速度。通过PLC对程序设计,提高了电梯的控制水平,并改善了电梯的电梯运行的舒适感。本文争对以上优点,对电梯运行进行了改进,使其达到了比较理想的控制效果。 四、所用设备及软件 本设计除了需要计算机,实验设备THPFSL-1/2还会用到两款软件:作图软件Altim Desinger、编程软件GX-developer。简介如表1所示。 表1 软件简介
系统总体结构原理图 主控制器是整个电梯的核心。不但要保证整个系统的稳定运行,而且要在极短的时间内对系统所有的任务进行响应。 其任务包括:接收、处理电梯的各种状态,并做出相应的动作,控制电梯的总体运行,实施对电梯驱动部分的控制,包括抱闸的松放、门机的开关、变频器低、中、高速的给出等控制。接收轿厢控制器送来的内选信号,执行内选外呼指令,向轿厢控制器、呼梯控制器发送楼层指示信号,实施安全保护等。为了实现电梯状态监控的需要,主控制器还加入了基于LCD显示的电梯参数设置、监控系统。 程序流程图
设计一个PLC控制系统以下七个步骤 1. 系统设计与设备选型 a. 分析你所控制的设备或系统。PLC最主要的目的是控制外部系统。这个系统可能是单个机器,机群或一个生产过程。 b. 判断一下你所要控制的设备或系统的输入输出点数是否符合可编程控制器的点数要求。(选型要求) c. 判断一下你所要控制的设备或系统的复杂程度,分析内存容量是否够。 2. I/O赋值(分配输入输出) a. 将你所要控制的设备或系统的输入信号进行赋值,与PLC的输入编号相对应。(列表) b. 将你所要控制的设备或系统的输出信号进行赋值,与PLC的输出编号相对应。(列表) 3. 设计控制原理图 a. 设计出较完整的控制草图。 b. 编写你的控制程序。 c. 在达到你的控制目的的前提下尽量简化程序。 4. 程序写入PLC 将你的程序写入可编程控制器。 5. 编辑调试修改你的程序 a.程序查错(逻辑及语法检查) b.在局部插入END,分段调试程序。 c.整体运行调试 6. 监视运行情况 在监视方式下,监视一下你的控制程序的每个动作是否正确。如不正确返回步骤5,如果正确则作第七步。 7. 运行程序(千万别忘记备份你的程序)首先,DCS和PLC 之间有什么不同? 1、从发展的方面来说: DCS从传统的仪表盘监控系统发展而来。因此,DCS从先天性来说较为侧重仪表的控制,比如我们使用的YOKOGAWA CS3000 DCS系统甚至没有PID数量的限制(PID,比例微分积分算法,是调节阀、变频器闭环控制的标准算法,通常PID的数量决定了可以使用的调节阀数量)。 PLC从传统的继电器回路发展而来,最初的PLC甚至没有模拟量的处理能力,因此,PLC从开始就强调的是逻辑运算能力。 2、从系统的可扩展性和兼容性的方面来说: 市场上控制类产品繁多,无论DCS还是PLC,均有很多厂商在生产和销售。对于PLC系统来说,一般没有或很少有扩展的需求,因为PLC系统一般针对于设备来使用。一般来讲,PLC也很少有兼容性的要求,比如两个或以上的系统要求资源共享,对PLC来讲也是很困难的事。而且PLC一般都采用专用的网络结构,比如西门子的MPI总线性网络,甚至增加一台操作员站都不容易或成本很高。 DCS在发展的过程中也是各厂家自成体系,但大部分的DCS系统,比如横河YOKOGAWA 、霍尼维尔、ABB等等,虽说系统内部(过程级)的通讯协议不尽相同,但操作级的网络平台不约而同的选择了以太网络,采用标准或变形的TCP/IP协议。这样就提供了很方便的可扩展能力。在这种网络中,控制器、计算机均作为一个节点存在,只要网络到达的地方,就可以随意增减节点数量和布置节点位置。另外,基于windows 系统的OPC、DDE等开放协议,各系统也可很方便的通讯,以实现资源共享。 3、从数据库来说: DCS一般都提供统一的数据库。换句话说,在DCS系统中一旦一个数据存在于数据库中,就可在任何情况下引用,比如在组态软件中,在监控软件中,在趋势图中,在报表中……而PLC系统的数据库通常都不是统一的,组态软件和监控软件甚至归档软件都有自己的数据库。为什么常说西门子的S7 400要到了414以上才称为DCS?因为西门子的PCS7系统才使用统一的数据库,而PCS7要求控制器起码到S7 414-3以上的型号。
系别:电子与电气学院 专业:自动化 班号:自动132 学生姓名:尼玛B 学生学号:尼玛B 设计(论文)题目:电梯控制系统组态设计指导教师:尹茜 设计地点:常州信息学院 起迄日期:
毕业设计(论文)任务书 一、课题名称:电梯控制系统组态设计 二、主要技术指标(或基本要求):1、研究数据采集与监控SCADA系统的组成原理和实现方法、步骤,研究电梯控制系统设计方案及监控要求,研究研组态王组态技术,基于组态王的电梯控制系统的设计方法; 2、完成毕业设计论文,理论性与实践性相结合,成果具有现实推广应用价值。 三、主要工作内容:1、掌握SCADA系统组成原理、实现方法,成果形成书面材料; 2、电梯系统的功能及监控要求进行设计,结果形成书面材料; 3、采用组态王进行控制系统的设计、构建数据库、图形界面的设计、完成人机界面组态; 5、完成毕业设计论文,理论性与实践性相结合,成果具有现实推广应用价值; 6、加强团队协作与交流,积极思考,独立操作,完善论文,提出改进方案。四、主要参考文献:[1]姚玉刚.电梯智能控制系统研究[D].长春理工大学硕士学位论文,2008. [2] 陈恒亮.电梯结构与原理[M].北京:中国劳动社会保障出版社,2005. [3]周祖得、陈幼平. 《机电一体化控制技术与系统》.华中科技大学出版社.2003 [4]补家武、左静、袁勇、吴来杰. 《机电一体化技术与系统设计》. 中国地质大学出版社.2001 学生(签名)20 年月日 指导教师(签名)20 年月日 教研室主任(签名)20 年月日 系主任(签名)20 年月日 \\\
毕业设计(论文)开题报告
河南工业职业技术学院 毕业设计 题目 PLC电梯控制系统的设计系院电气工程系 专业 班级 学生姓名 学号 指导教师
前言 随着电子技术的发展,当前数字电器系统的设计正朝着速度快、容量大、体积小、重量轻的方向发展。推动该潮流发展的引擎就是日趋进步和完善的PLC设计技术。目前数字系统的设计可以直接面向用户需求,根据系统的行为和功能的要求,自上而下的完成相应的描述、综合、优化、仿真与验证,直接生成器件。上述设计过程除了系统行为和功能描述以外,其余所有的设计几乎都可以用计算机来自动完成,也就说做到了电器设计自动化这样做可以大大的缩短系统的设计周期,以适应当今品种多、批量小的电子市场的需求。 电器设计自动化的关键技术之一是要求用形式化的方法来描述数字系统的硬件电路,即要用所谓的硬件语言来描述硬件电路。所谓硬件描述语言及相关的仿真、综合等技术的研究是当今电器设计自动化领域的一个重要课题。 PLC的设计和开发,已经有多种类型和款式。传统的PLC各有特点,它们适合在现场做手工测量,要完成远程测量并要对测量数据做进一步分析处理,传统PLC是无法完成的。然而基于PC 通信的PLC,既可以完成测量数据的传递,又可借助PC,做测量数据的处理。所以这种类型的PLC无论在功能和实际应用上,都具有传统PLC无法比拟的特点,这使得它的开发和应用具有良好的前景。
目录 1.前言 2.电梯控制基本概念 3.电梯控制的组成 4.电梯控制的移动 5.电梯PLC系统的模拟组态 6.货运电梯重量超载的控制 7.总结 8.参考文献
2. PLC电梯控制的基本概念 电梯控制系统可分为电力拖动系统和电气控制系统两个主要部分。电力拖动系统主要包括电梯垂直方向主拖动电路和轿箱开关电路。二者均采用易于控制的直流电动机作为拖动动力源。主拖动电路采用PWM调试方式,达到了无级调速的目的。而开关门电路上电机仅需一种速度进行运动。电气控制系统则由众多呼叫按钮、传感器、控制用继电器、指示灯、LED七段数码管和控制部分的核心器件(PLD)等组成。PLC集信号采集、信号输出及逻辑控制于一体,与电梯电力拖动系统一起实现了电梯控制的所有功能。 电梯控制系统原理框图如图1所示,主要由轿箱内指令电路、门厅呼叫电路、主拖动电机电路、开关门电路、档层显示电路、按钮记忆灯电路、楼层检测与平层检测传感器及PLC电路等组成的。 电梯控制系统的硬件结构如图2所示。包括按钮编码输入电路、楼层传感器检测电路、发光二极管记忆灯电路、PWM控制直流电机无线调速电路、轿箱开关电路、楼层显示电路及一些其他辅助电路等。为减少PLC输入输出点数,采用编码的方式将31个呼叫及指层按钮编码五位二进制码输入PLC PLC系统的其它设备 1 编程设备:编程器是PLC开发应用、监测运行、检查维护不可缺少的器件,用于编程、对系统作一些设定、监控PLC及PLC 所控制的系统的工作状况,但它不直接参与现场控制运行。小编程器PLC一般有手持型编程器,目前一般由计算机(运行编程软件)充当编程器。 2 人机界面:最简单的人机界面是指示灯和按钮,目前液晶屏(或触摸屏)式的一体式操作员终端应用越来越广泛,由计算机(运行组态软件)充当人机界面非常普及。 3 输入输出设备:用于永久性地存储用户数据,如EPROM、EEPROM写入器、条码阅读器,输入模拟量的电位器,打印机等。