信号与系统练习题集
第一部分:信号与系统的时域分析
一、填空题 1. =---)3()()
2(t t u e
t δ ( ).
2. The unit step response )(t g is the zero-state response when the input signal is ( ).
3. Given two continuous – time signals x(t) and h(t), if their convolution is denoted by y(t), then the convolution of )1(-t x and )1(+t h is ( ).
4. The convolution =+-)(*)(21t t t t x δ( ).
5. The unit impulse response )(t h is the zero-state response when the input signal is ( ).
6. A continuous – time LTI system is stable if its unit impulse response satisfies the condition: ( ) .
7. A continuous – time LTI system can be completely determined by its ( ).
8. =?∞∞-(t)dt 2sin 2 δt t ( ).
9. Given two sequences }1,2,2,1{][=n x and }5,6,3{][=n h , their convolution =][*][n h n x ( ).
10. Given three LTI systems S1, S2 and S3, their unit impulse responses are )(1t h , )(2t h and
)(3t h respectively. Now, construct an LTI system S using these three systems: S1 parallel
interconnected by S2, then series interconnected by S3. the unit impulse response of the system S is ( ).
11. It is known that the zero-stat response of a system to the input signal x(t) is ?∞-=t
d x t y ττ)()(,
then the unit impulse response h(t) is ( ).
12. The complete response of an LTI system can be expressed as a sum of its zero-state response and its ( ) response.
13. It is known that the unit step response of an LTI system is )(2t u e
t
-, then the unit impulse response h(t)
is ( ).
14. =++-=?∞
dt t t t t x ))1()1((2
sin )(0δδπ
( ).
15. We can build a continuous-time LTI system using the following three basic operations:
( ) , ( ), and ( ). 16. The zero-state response of an LTI system to the input signal )1()()(--=t u t u t x is
)1()(--t s t s , where s(t) is the unit step response of the system, then the unit impulse response
is h(t) = ( ).
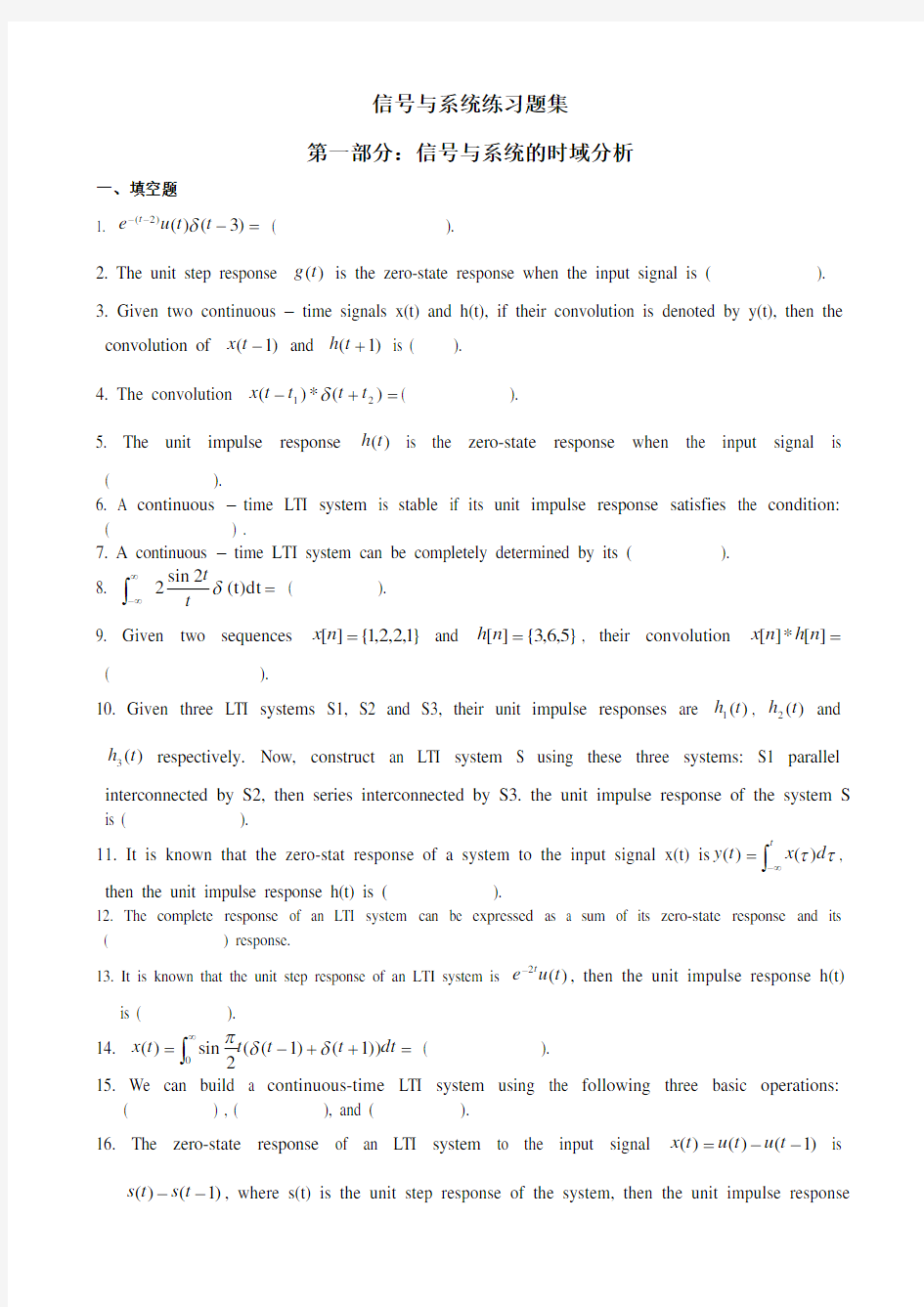
17. The block diagram of a continuous-time LTI system is illustrated in the following figure. The differential
equation
describing
the input-output relationship
of the system
is
( ).
18. The relationship between the unit impulse response h(t) and unit step response s(t) is s(t) =
( ), or h(t) = ( ).
二、选择题
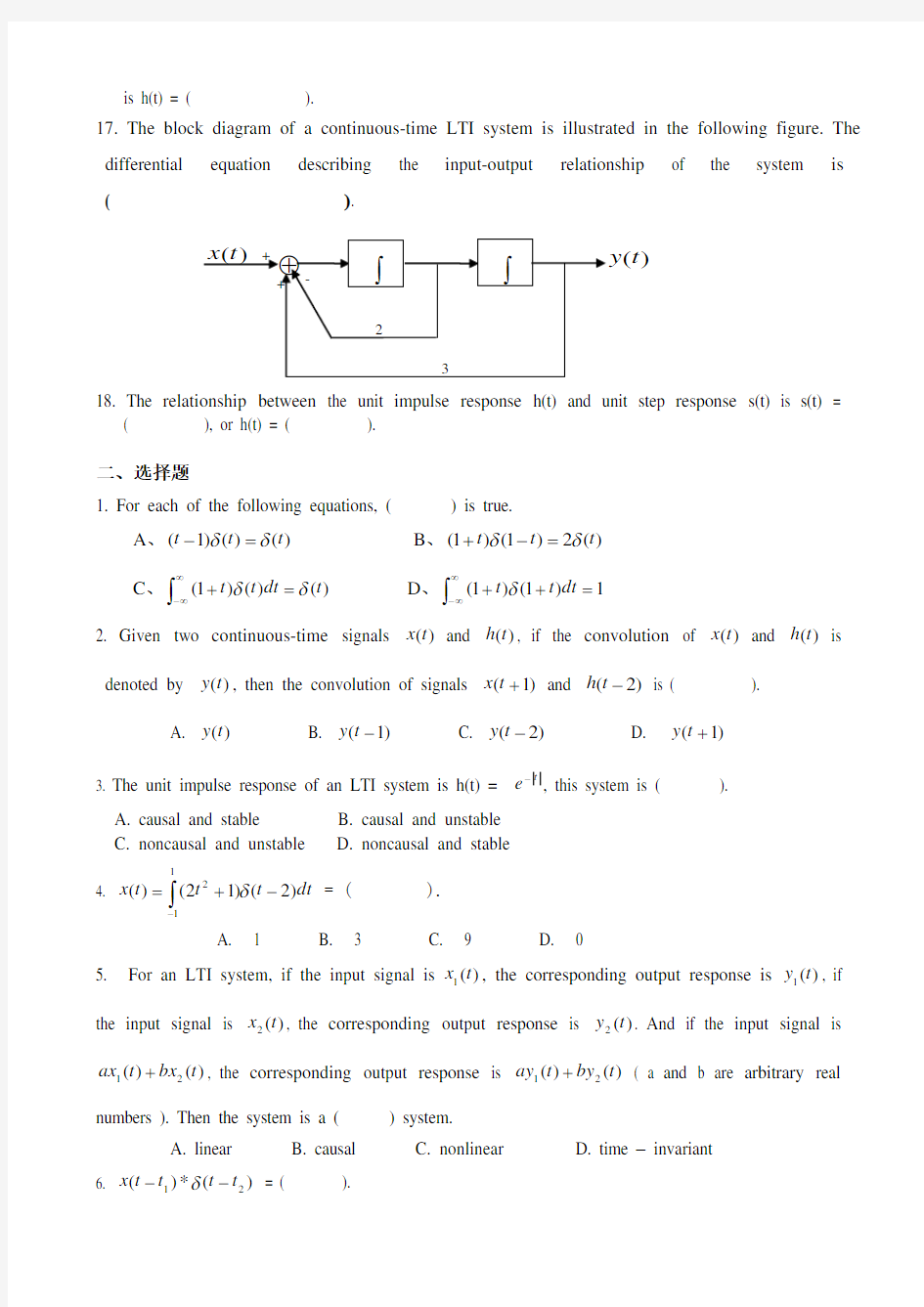
1. For each of the following equations, ( ) is true.
A 、)()()1(t t t δδ=-
B 、)(2)1()1(t t t δδ=-+
C 、?∞
∞
-=+)()()1(t dt t t δδ D 、?∞
∞
-=++1)1()1(dt t t δ
2. Given two continuous-time signals )(t x and )(t h , if the convolution of )(t x and )(t h is denoted by )(t y , then the convolution of signals )1(+t x and )2(-t h is ( ).
A. )(t y
B. )1(-t y
C. )2(-t y
D. )1(+t y
3. The unit impulse response of an LTI system is h(t) = t
e
-, this system is ( ).
A. causal and stable
B. causal and unstable
C. noncausal and unstable
D. noncausal and stable
4. dt t t t x )2()12()(1
1
2-+=?
-δ = ( ).
A. 1
B. 3
C. 9
D. 0
5. For an LTI system, if the input signal is )(1t x , the corresponding output response is )(1t y , if the input signal is )(2t x , the corresponding output response is )(2t y . And if the input signal is
)()(21t bx t ax +, the corresponding output response is )()(21t by t ay + ( a and b are arbitrary real
numbers ). Then the system is a ( ) system.
A. linear
B. causal
C. nonlinear
D. time – invariant
6. )(*)(21t t t t x --δ = ( ).
)(t
A. )(21t t t x --
B. )(21t t t x +-
C. )(21t t t x -+
D. )(21t t t ++δ
7. =???
?
?-+=?∞∞
-dt t t t t x 6)sin ()(πδ ( ). A.
6π B.16
-π
C. 216-π
D. 216+π
8. Given two sequences ][1n x and ][2n x , their lengths are M and N respectively. The length of the
convolution of ][1n x and ][2n x is ( ).
A .M
B .N
C .N M +
D .1-+N M
9. The unit impulse response of a continuous-time LTI system is dt
t d t t h )
()(2)(δδ+
=, the differential equation describing the input-output relation of this system is ( ).
A.)()()(2t x dt t dy t y =+
B. )()
(2)(t x dt
t dy t y =+
C. dt t dx t x t y )()(2)(+=
D. dt
t dx t x dt t dy )
(2
)()(+= 10. The input-output relation of a continuous-time LTI system is described by the differential
equation: dt t dx t x t y dt t dy dt
t y d )()(2)(3)(2)(2
2+=++. The unit impulse response of the system h(t) ( ).
A . does not include )(t δ B. includes )(t δ C. includes
dt
t d )
(δ D. is uncertain 11. Signals )(1t x and )(2t x are shown in the following figures. The expression of the convolution )(*)()(21t x t x t x = is ( ).
A. )1()1(--+t u t u
B. )2()2(--+t u t u
C. )1()1(+--t u t u
D. )2()2(+--t u t u
12. The following block diagram represents a continuous-time LTI system. The unit impulse
-1
1
(1)
(1)
)(2t x
response h(t) satisfies ( ).
A. )()()(t x t y dt
t dy =+
B. )()()(t y t x t h -=
C.
)()()
(t t h dt
t dh δ=+ D. )()()(t y t t h -=δ
13. The input-output relationship of a causal continuous-time system is described by the differential equation:
dt
t dx t y dt t dy )
(2
)(3)(=+, then the unit step response =)(t s ( ). A. )(23t u e t - B. )(213t u e t - C. )(23t u e t D. )(2
1
3t u e t
三、综合题(分析、计算题)
1. The input-output relationship of a continuous-time LTI system is described by the equation:
τττd x e t y t
t )2()()(-=?∞---,
a. Determine the unit impulse response h(t) of the system.
b. Determine the system response y(t) to the input signal )2()1()(--+=t u t u t x .
2. Given an LTI system depicted in Figure 2. Assume that the impulse response of the LTI system is h(t) = e -t u(t), the input signal x(t) = u(t) - u(t-2). Determine and sketch the output response y(t) of the system by evaluating the convolution y(t) = x(t)*h(t).
3. Remember the following identities:
)(*)()(t t x t x δ= )(*)()(00t t t x t t x -=-δ
)()(*)(00t t t t t δδδ=-+
dt
t dh t x t h dt t dx dt t dy )
(*
)()(*)()(== 4. Consider an LTI system S and a signal )1(2)(3-=-t u e t x t . If
)()(t y t x →
and
)()(3)
(2t u e t y dt
t dx t -+-→, determine the impulse response h(t) of S.
Figure 2
⊕
)
(t x )t
+
5. Let )5()3()(---=t u t u t x and )()(3t u e t h t -=, as illustrated in the Figure
6.
(a). Compute y(t) = x(t)*h(t).
(b). Compute g(t) = dx(t)/dt * h(t).
(c). How is g(t) related to y(t)?
6. Let ∑∞
-∞
=--=k t
k t t u e t y )3(*
)()(δ
Show that t Ae t y -=)( for 0 ≤ t < 3, and determine the value A. 7. A causal LTI system is described by the differential equation:
)()
()(2)(3)(22t x dt
t dx t y dt t dy dt t y d +=++ If the input signal is )()(2t u e t x t -=, determine the zero-state response y(t) of the system.
8. In this problem, we illustrate one of the most important consequences of the properties of linearity and time invariance. Specifically, once we know the response of a linear system or a linear time-invariant system to a single input or responses to several inputs, we can directly compute the responses to many other input signals.
(a). Consider an LTI system whose response to the signal x 1(t) in Figure 9(a) is the signal y 1(t) illustrated in Figure 9(b). Determine and sketch carefully the response of the system to the input x 2(t) depicted in Figure 9(c).
(b). Determine and sketch the response of the system considered in part (a) to the input x 3(t) shown in Figure 9(d).
)
(t x t
5
)
(t h t
Figure 6
1
3
1
t
t
第二部分:信号与系统的频域分析
一、填空题
1. The frequency response of an ideal filter is given by ????
?<≥=π
ωπωω100,
0100,
2)(j H , if the input
signal is )120cos(5)80cos(10)(t t t x ππ+=, the corresponding output response y(t) = ( ).
2. The Fourier transform of signal )cos()(0t t x ω= is ( ).
3. The Fourier transform of signal )6
sin()(0π
ω+
=t t x is ( ).
4. Assume that the Fourier transform of )(t x is denoted as )(ωj X , then the Fourier transform of
)()(0t x e t y t j ω= is )(ωj Y = ( ).
5. The Fourier transform of a continuous – time periodic signal ∑∞
-∞
==k t
jk k
e
a t x 0)(ω is )(ωj X =
( ).
6. It is known that the Fourier transform of )(t x is 1
1
)(+=
ωωj j X , then the Fourier transform of )(t tx is ( ).
7. The Fourier transform of signal )(t x is denoted as )(ωj X , the Fourier transform of )()1(t x t - is ( ).
8. A time shifting leads to a ( ).
9. The frequency responses of two LTI systems are assumed to be 1()H j ω and 2()H j ω, the frequency response of the interconnection of 1()H j ω cascaded by 2()H j ω is ()H j ω = ( ).
10. A time-domain compression corresponds to a frequency-domain ( ). 11. For a signal x(t), if the condition
?
∞
∞
-∞
exists, this condition is ( ) but not ( ).
12. Figure 12 shows a continuous-time signal )(t x , its Fourier transform is denoted as )(ωj X , then =)0(X ( ). (Without evaluating )(ωj X ).
13. For a continuous-time LTI system, if the zero-state response of the system to
the input signal
)()(t u e t x t -= is
)()()(2t u e t u e t y t t ---=, then the frequency response of the
system is =)(ωj H ( ). 14. The Fourier transform of signal t
t
t x 4sin )(= is =)(ωj X ( ).
15. The inverse Fourier transform of )(ωδ is =)(t x ( ).
16. The frequency spectrum includes two parts, one is ( ), the other is ( ). 17. Let )(ωj X denote the Fourier transform of signal )(t x , then the Fourier transform of signal
)4cos(*)32
()(t t
x t y += is =)(ωj Y ( ). (Expressed using )(ωj X ).
18. Let )(ωj X denote the Fourier transform of signal )(t x , then the Fourier transform of signal
)cos()()(t t x t y π= is =)(ωj Y ( ). (Expressed using )(ωj X ).
19. The period of the periodic square wave increases, the space of the spectral lines ( ).
20. Consider a continuous-time ideal lowpass filter S whose frequency response is
????
?>≤=100
1001)(ωωωj H
When the input to this filter is a signal x(t) with fundamental period T = π/6 and Fourier series coefficients a k , it is found that
)()()(t x t y t x S =?→?
For k ( ) it is guaranteed that a k = 0.
21. Consider a continuous-time LTI system whose frequency response is
ω
ωωω)
4s i n ()()(==
?
+∞
∞
--dt e t h j H t j
If the input to this system is a periodic signal ???<≤-<≤=8414
01)(t t t x with period T = 8, the
corresponding system output is y(t) = ( ).
二、选择题
1. The frequency response of an ideal lowpass filter is
????
?>≤=π
ωπωω120,
0120,
2)(j H .
If the input signal is )200cos(5)100cos(10)(t t t x ππ+=, the output response is )(t y = ( ).
A. )100cos(10t π
B. )200cos(10t π
C. )100cos(20t π
D. )200cos(5t π
2. The Fourier transform of the rectangular pulse )1()1()(--+=t u t u t x is ( ).
A. )(4ωSa
B. )(2ωSa
C. )2(2ωSa
D. )2(4ωSa
3. Let )(ωj X denote the Fourier transform of a signal )(t x , the Fourier transform of jt e t x )( is ( ).
A. )(ωωj X e j -
B. )(ωωj X e j
C. ))1((-ωj X
D. ))1((+ωj X
4. Let )(ωj X denote the Fourier transform of signal )(t x , the Fourier transform of )1(-t x is ( ).
A. )(ωωj X e j -
B. )(ωωj X e j
C. ))1((-ωj X
D.))1((+ωj X 5. The Fourier transform of the rectangular pulse )1()()(--=t u t u t x is ( ).
A. 2
)2
(ωω
j
e
sa - B. 2
)2
(ωω
j
e
sa C. ωωj e sa -)( D. ωωj e sa )(
6. The condition for signal transmission with no distortion is that ( ).
A. The magnitude response is a constant in the passband.
B. The phase response is a line cross the origin in the passband.
C. The magnitude response is a constant and the phase response is a line cross the origin in the passband.
D. The phase response is a constant and the magnitude response is a line cross the origin. 7. The bandwidth of a signal )(t x is 20KHz, the bandwidth of signal )2(t x is ( ).
A.20KHz
B.40KHz
C.10KHz
D.30KHz
8. Let )(ωj X denote the Fourier transform of signal )(t x , the Fourier transform of dt
t dx t )
( is ( ).
A.ωωω
ωd j dX j X )
()(- B. ω
ωω
ωd j dX j X )
()(+- C. ω
ωωωd j dX j X )
()(-- D. ω
ωω
ωd j dX j X )
()(+ 9. Let )(ωj X denote the Fourier transform of signal )(t x , the Fourier transform of
)()(b a
t
x t y += is ( ).
A. ω
ωjab e
j X a )( B. ω
ωjab e
ja X a -)( C. ωωa b j e a j X a )(1 D. ω
ωa b
j e a
j X a -)(1
10. Let )(ωj X denote the Fourier transform of signal )1()1()(--+=t u t u t x , then =)0(X ( ).
A. 2
B. π
C.
π2
1
D. 4 11. Let )(ωj X denote the Fourier transform of signal )(t x , the Fourier transform of )1(t x - is ( ).
A .ω
ωj e j X )(-- B .ω
ωj e
j X -)( C .ω
ωj e
j X --)( D .ωωj e j X )(-
12. Let )(ωj X denote the Fourier transform of signal )(t x , the Fourier transform of
)()()(a t t x t y -=δ is ( ).
A. ωωja e j X -)(
B. ωja e a x -)(
C. ωωja e j X )(
D. ωja e a x )(
13. The Fourier transform of signal )()()(τδτδ-++=t t t x is =)(ωj X ( ).
A. ωτcos 21
B. ωτcos 2
C. ωτsin 2
1
D. ωτsin 2
14. Let ),()(t e t x t δ-= and ττd x t y t
?∞-=)()(. The Fourier transform of y(t) is =)(ωj Y ( ).
A.
ωj 1 B. ωj C. )(1ωπδω+j D. )(1
ωπδω
+-j 15. Consider the square wave )2
1
()21()(ττ--+=t u t u t x , as τ decreases, the width of the main
lobe of )(ωj X ( ).
A. increases
B. decreases
C. does not change
D. can not be determined
16. It is known that the bandwidth of x(t) is ω?, the bandwidth of )12(-t x is ( ).
A. ω?2
B. 1-ω?
C. ω?21
D. )
(1-2
1
ω? 17. The inverse Fourier transform of 01
)(t j e a
j j X ωωω+=
is =)(t x ( ). A. )()()(0t u e t x t t a +-= B. )()(0)(0t t u e t x t t a +=+- C. )()(0)(0t t u e t x t t a -=-- D. )()()(0t u e t x t t a --=
18. The Fourier transform of signal )(t x τ is )2()(τω
τωτSa j X =, then the Fourier transform of
signal )1()(-=t x t y τ is =)(ωj Y ( ).
A. ωωωj e Sa j Y )()(=
B. ωωωj e Sa j Y -=)()(
C. ωωωj e Sa j Y )(2)(=
D. ωωωj e Sa j Y -=)(2)(
19. Given an LTI system with its frequency response 2
1
)(+=
ωωj j H , it is known that the Fourier transform of the output response y(t) is )
3)(2(1
)(++=
ωωωj j j Y , the input signal
)(t x =( ).
A. )()(2t u e t x t -=
B. )()(3t u e t x t --=-
C. )()(3t u e t x t -=
D. )()(3t u e t x t =
20. The frequency response of an ideal lowpass filter is ??
?≥<=-2
2
)(ωωωω
j e j H , its unit impulse response is h(t) = ( ).
A.
)1(2sin -t t π B. )1()1(2sin --t t π C. )1(sin -t t π D. )
1()1sin(--t t π
三、综合题(分析、计算)
1. Consider a continuous-time LTI system whose frequency response is
ω
ωω)
4sin()(=j H
If the input to this system is a periodic signal ???<≤-<≤=8414
01)(t t t x with period T = 8, determine
the corresponding system output y(t).
2. The fundamental frequency of a continuous-time periodic signal is ω0 = π, Figure 2 shows the spectral coefficients of x(t).
(a) Write out the expression of x(t).
(b) If x(t) is applied to an ideal highpass filter with
frequency response ??
?≥=otherwise
j H ,
015,
1)(π
ωω,
determine the output signal y(t).
3. Figure 3.a illustrates a communication system. Let X 1(j ω) and X 2(j ω) denote the Fourier transforms of x 1(t) and
x 2(t), respectively. It is known that ω1 = 4π, ω2 = 8π, and the frequency response of the ideal bandpass filter is H 1(j ω), the overall output response is y(t). (1). Plot the magnitude of the Fourier transform W(j ω) of w(t).
(2). Choose an appropriate frequency ω3, so that the output response is y(t) = x 1(t); (3). Plot the magnitude responses of H 1(j ω) and H 2(j ω).
Figure 3
?
?
)
t ω)
2t ω)
(1t x )
(2t x
(a)
?
)
cos(3t ω?
??
?
k
k
a ∠Figure 2
4. Figure 4 shows the Fourier transform )(ωj X of a periodic continuous-time signal )(t x . (1). Write out the expression of )(t x .
(2). Let ??
?≤=Otherwise
j H ,
012,
1)(π
ωω be the
frequency response of an ideal lowpass filter, and )(t x is applied to the filter, determine the output response y(t) of the filter.。
5. For a causal LTI system, the input and output signals are )()()(3t u e t u e t x t t --+=,
)()22()(4t u e e t y t t ---=, respectively.
(1). Determine the frequency response )(ωj H . (2). Determine the unit impulse response )(t h .
(3). Determine the differential equation describing the input-output relationship of the system.
6. The frequency response of an ideal bandpass filter is ???≤≤=Otherwise
j H ,03
1,1)(ωω, the unit impulse
response is denoted as h(t), we now have that )(sin )(t g t
t
t h π=
, determine )(t g . 7. A continuous-time signal )cos()(t t x π= is sampled by the impulse train ∑∞
-∞
=-=k kT t t p )()(δ
getting )(t x p , where, T = 0.5s.
(1). Plot the Fourier transform )(ωj X of )(t x . (2). Plot the Fourier transform )(ωj X p of )(t x p .
(3). Let ??
?≤≤=otherwise
j H ,
084,
1)(πωπω be the frequency response of an ideal bandpass filter. If
)(t x p is applied to the filter, the output response is denoted as y(t), plot the Fourier transform
)(ωj Y of y(t).
(4). By observing )(ωj Y , write out the expression of )(t y .
Figure 4
8. Figure 8 illustrates a communication system, The Fourier transforms of the input and output signals )(t x and )(t y are denoted as )(ωj X and )(ωj Y , respectively. If x(t) = cos(0.5πt), determine y(t) and plot )(ωj Y .
9. Let X(j ω) denote the Fourier transform of the signal x(t) depicted in Figure P4.25.
(a). Find )(ωj X ∠.
(b). Find )0(j X .
(c). Evaluate
?∞
∞
-ωωd j X )(.
?
?
)(t x
)5cos(t π
)3cos(t π
)
(1t x t
12
2-1
1
-Figure P4.25.a.
(d). Evaluate
?
∞
∞-ωω
ω
ωωd e j X j 2sin 2)
(.
(e). Evaluate
?
∞
∞
-ωωd j X 2
)(.
(f). Sketch the inverse Fourier transform of Re{ X(j ω)}.
Note: You should perform all these calculations without explicitly evaluating X(j ω). 10. Consider an LTI system whose response to the input
()
)()(3t u e e t x t t --+=
is ())(22)(4t u e e t y t t ---= (a). Find the frequency response of this system. (b). Determine the system ’s impulse response.
(c). Find the differential equation relating the input and the output of this system.
11. Let t
t
t t x t g πsin *cos )()(2=
Assuming that x(t) is real and X(j ω) = 0 for |ω| ≥ 1, show that there exists an LTI system S such that x(t)S
→g(t). (Note: find the relationship between x(t) and g(t))
第三部分:信号与系统的s 域分析
一、填空题
1. The ROC of the Laplace transform 1
1
31)(++
+=s s s X is 3}Re{-
2. It is known that the LTI system described by )
3)(2(1
)(++=s s s H is stable, then the ROC of
H(s) is ( ).
3. The system function of a causal LTI system is 3
42
)(2+++=
s s s s H , then the differential equation
describing the input-output relationship of the system is ( ). 4. The Laplace transform of signal )(2t u e t - is ( ), the associated ROC is ( ). 5. Assume that the system function of an anticausal LTI system is 2
1
)(-=
s s H , then the frequency response =)(ωj H ( ), the unit impulse response =)(t h ( ).
6. It is known that a causal continuous-time LTI system H(s) is stable, then all of the poles of H(s) are located in ( ).
7. It is known that the Laplace transform of signal x(t) is 1}Re{,1
1
)(->+=
s s s X , then =-)1(*)(t t x δ ( ).
8. The differential equation )(3)
()(2)(2)(2
2t x dt t dx t y dt t dy dt
t y d +=++ describes the input-output relationship of an LTI system, then the system function is H(s) = ( ).
9. The Laplace transform of a causal signal x(t) is denoted as X(s), then the Laplace transform of signal
ττd x t
?
∞
--)1(is ( ).
10. Given a continuous-time LTI system, it is known that the zero-state response to arbitrary input x(t) is x(t-t 0), t 0 > 0, then the system function of the system is H(s) = ( ). 11. The Laplace transform of a continuous-time signal x(t) is 0}Re{,)
12(1
)(>+=-s e s s s X s , then
x(t) = ( ).
12. Figure 1.12 illustrates an LTI system, its system function is H(s) = ( ).
13. It is known that a causal continuous-time LTI system with system function a
s s H -=1
)( is stable, then the coefficient a must satisfy: ( ).
14. Given two signals )()(21t u e t x t -= and )()(32t u e t x t -=, and )3(*)2()(21+--=t x t x t y , then the Laplace transform of y(t) is Y(s) = ( ).
15. A causal continuous-time LTI system has rational system function H(s). The sufficient and necessary condition for which the system is stable is that all of the poles of H(s) are located in the ( ) of the s-plane.
二、选择题
1. The Laplace transform of signal )1()()(--=t u t u t x is ( ).
A. s e s /)1(--
B. s e s /)1(-
C. )1(s e s --
D. )1(s e s -
2. The system function H(s) of an LTI system has two poles at p 1 = -3, p 2 = -1, and one zero at z = -2 in the finite s-plane. It is known that H(0) = 2, then the system function is ( ).
A. )3)(1()2(2)(+++=
s s s s H B. )1)(2()
3(2)(+++=s s s s H
C. )3)(1()2(3)(+++=
s s s s H D. )
3)(1()
2()(+++=s s s s H
3. The Laplace transform of signal )()()(23t u e t u e t x t t --=-- is 3
1
21)(++
+=s s s X , then the ROC of X(s) is ( ).
A. 2}Re{->s
B. 3}Re{->s
C. 2}Re{3-<<-s
D. 2}Re{-
)1(1
21)(+++=
s s s X with its ROC: 1}Re{->s , then the inverse Laplace transform is x(t) = ( ).
A. )()(2t u e t u e t t --+
B. )()(2t u e t u te t t --+
)(t y
Figure 1.12
C. )()(2t u te t u e t t --+
D. )()(t u te t u e t t --+
5. The system function of an LTI system is 3
42
)(2+++=s s s s H ,1}Re{->s , then the system is
( ).
A. causal and stable
B. causal and unstable
C. anticausal and stable
D. anticausal and unstable
6. The Laplace transform of signal )()()(2t u e t u e t x t t --=-- is 1
1
21)(++
+=s s s X , then the ROC of X(s) is ( ).
A. 2}{->s R
B. 1}{->s R
C. 1}{2-<<-s R
D. 1}{-
7. The system function of an LTI system is 2
)1(111)(+++=s s s X ,1}Re{->s , then impulse response of the system is ( ).
A. )()(2t u e t u e t t --+
B. )()(2t u e t u te t t --+
C. )()(2t u te t u e t t --+
D. )()(t u te t u e t t --+ 8. The system function of a causal LTI system is 6
56
)(2--+=
s s s s H , then the system is ( ).
A. stable
B. unstable
C. critical stable (临界稳定)
D. indeterminacy
9. The unit step response of a continuous-time LTI system is ),()1()(2t u te t s t -+= then the system function of the system is H(s) = ( ).
A .2
)2(1++
s s
B .
2
)2(1++s s s C .2
)2(1
211++++s s s D .2
)2(1
1++
s
10. The Laplace transform of a causal signal x(t) is 2
)
(1
)(a s s X +=
, then x(t) = ( ). A. )(t u e at - B. )(t u te at C. )(2t u e t at -
D. )(t u te at -
11. A continuous-time LTI system can be described by its system function H(s), and it is known that the frequency response H(j ω) exists, then the system must be ( ).
A. time-invariant
B. causal
C. stable
D. linear
12. Let ))4()((*)()(--=t t t u t y δδ, then the Laplace transform of y(t) is Y(s) = ( ).
A. )1(1)(4s e s s Y -=
B. 41
1)(+-=s s s Y
C. )1(1)(4s e s s Y --=
D. 41
1)(++=s s s Y
13. Let 2}Re{,2
1)()
2(->+=--s e s s X s be the Laplace transform of signal x(t), then ( ).
A. )1()(2-=-t u e t x t
B. )1()()2(2-=--t u e t x t
C. )2()(2-=-t u e t x t
D. )1()()1(2-=--t u e t x t
14. Let X(s) denote the Laplace transform of x(t), then the Laplace transform of signal x(2t - 5) is ( ).
A. s e s X 25
)2(21- B. s e s X 5)2(21- C. s
e s X 5)2
(21 D.s e s X 25
)2(21
15. H(s) is the system function of an LTI system, then mathematical form of the unit impulse response h(t) can only be determined by ( ).
A. the zeros of )(s H
B. the poles of )(s H
C. the input signal
D. the input signal and the poles of )(s H
三、综合题(分析、计算)
1. Given a causal LTI system, if the input signal is )()(t u e t x t -=, the output response is
)()6
1
2131()(42t u e e e t y t t t ---+-=,
(1). Determine the system function H(s); (2). Is the system stable? Why?
(3). If we apply the signal )()(2t u e t x t -= to the system, determine the corresponding output response y(t).
2. Consider a causal LTI system described by the differential equation:
)(3)
()(2)(3)(2
2t x dt t dx t y dt t dy dt
t y d +=++ (1). Determine the system function H(s); (2). Plot the pole-zero diagram. (3). Is the system stable? Why?
(4). If we apply the signal )()(t u e t x t -= to the system, determine the corresponding output response y(t).
3. It is known that 2
3)(2
++=
s s s
s X is the Laplace transform of a continuous-time signal x(t). Determine the inverse Laplace transforms for each of the following ROCs:
(1). Re{s} > -1; (2). -2 < Re{s} < -1; (3). Re{s} < -2.
4. Let 12
72
)(2+++=
s s s s X be the Laplace transform of signal x(t). Determine all possible
expressions of x(t) corresponding to X(s) using the partial-fraction expansion technique.
5. It is known that the system function of an LTI system is 2
34)(2+++=s s s s H , and dt t dg t h )
()(=,
where, h(t) and g(t) are the unit impulse and unit step responses of the system. Determine the unit step responses for each of the following ROCs of H(s).
(1). Re{s} > -1; (2). -2 < Re{s} < -1; (3). Re{s} < -2.
6. The block diagram of a causal LTI system is illustrated in Figure 3.6.
(1). Determine the system function H(s); (2). Determine the unit impulse response h(t); (3). Plot the pole-zero diagram of the system; (4). Is the system stable? Why?
7. The block diagram of a causal LTI system is shown in Figure 3.7.
(t x )
(t Figure 3. 6
(s X )(s Y
(1). Determine the unit impulse response h(t);
(2). Determine the differential equation describing the input-output relationship of the system; (3). If the input signal is )()(3t u e t x t
-=, determine the output response y(t);
(4). Is the system stable? Why?
8. The input-output relationship of a causal LTI system is described by the differential equation:
)()(*)()(6)(5)(2
2t x t x t u e t y dt t dy dt
t y d t
+=++- (1). Determine the system function H(s); (2). Determine the unit impulse response h(t); (3). Is the system stable? Why?
9. Suppose that we are given the following information about an LTI system:
(1). The system is causal;
(2). The system function is rational and has only two poles, at s = -2 and s = 4; (3). If x(t) = 1, then y(t) = 0.
(4). The value of the impulse response at t = 0+ is 4.
Determine the system function H(s), the unit impulse response h(t), interpret the stability of the system.
10. Using geometric evaluation of the magnitude of the Fourier transform from the corresponding pole-zero plot, determine, for each of the following Laplace transforms, whether the magnitude of the corresponding Fourier transform is approximately lowpass, highpass, or bandpass:
(1). 1}Re{,
)
3)(1(1
)(1->++=
s s s s H ;
(2). 21
}Re{,
1)(22->++=s s s s
s H ;
(3). 1}Re{,1
2)(2
2
3->++=s s s s s H
11. Consider an LTI system for which the system function H(s) has the pole-zero pattern shown in Figure 3.11.
(1). Indicate all possible ROCs that can be associated with this pole-zero pattern;
(2). For each ROC identified in part (1), specify whether the associated system is stable and/or causal.
× × × -1 -2 1
2
j ω
σ Figure 3.11
1-1 (2)∞<<-∞=-t e t f t ,)( (3))()sin()(t t t f επ= (4))(sin )(t t f ε= (5))(sin )(t r t f = (7))(2)(k t f k ε= (10))(])1(1[)(k k f k ε-+= 1-3 1-5 判别下列各序列是否为周期性的。如果是,确定其周期。 (2))6 3cos()443cos()(2π πππ+++=k k k f (5))sin(2cos 3)(5t t t f π+= :
1-9 已知信号的波形如图1-11所示,分别画出 )(t f和 dt t df)( 的波形。 解:由图1-11知,) 3(t f-的波形如图1-12(a)所示() 3(t f-波形是由对) 2 3(t f- 的波形展宽为原来的两倍而得)。将) 3(t f-的波形反转而得到)3 (+ t f的波形,如图1-12(b)所示。再将)3 (+ t f的波形右移3个单位,就得到了)(t f,如图1-12(c)所示。dt t df)(的波形如图1-12(d)所示。 1-23 设系统的初始状态为)0(x,激励为)(? f,各系统的全响应)(? y与激励和初始状态的关系如下,试分析各系统是否是线性的。 (1)?+ =-t t dx x xf x e t y ) ( sin )0( )((2)?+ =t dx x f x t f t y ) ( )0( )( )( (3)?+ =t dx x f t x t y ) ( ])0( sin[ )((4))2 ( ) ( )0( )5.0( ) (- + =k f k f x k y k (5)∑=+ = k j j f kx k y ) ( )0( ) (
信号与系统期末考试试题 一、选择题(共10题,每题3分 ,共30分,每题给出四个答案,其中只有一个正确的) 1、 卷积f 1(k+5)*f 2(k-3) 等于 。 (A )f 1(k)*f 2(k) (B )f 1(k)*f 2(k-8)(C )f 1(k)*f 2(k+8)(D )f 1(k+3)*f 2(k-3) 2、 积分 dt t t ? ∞ ∞ --+)21()2(δ等于 。 (A )1.25(B )2.5(C )3(D )5 3、 序列f(k)=-u(-k)的z 变换等于 。 (A ) 1-z z (B )-1-z z (C )11-z (D )1 1--z 4、 若y(t)=f(t)*h(t),则f(2t)*h(2t)等于 。 (A ) )2(41t y (B ))2(21t y (C ))4(41t y (D ))4(2 1 t y 5、 已知一个线性时不变系统的阶跃相应g(t)=2e -2t u(t)+)(t δ,当输入f(t)=3e —t u(t)时,系 统的零状态响应y f (t)等于 (A )(-9e -t +12e -2t )u(t) (B )(3-9e -t +12e -2t )u(t) (C ))(t δ+(-6e -t +8e -2t )u(t) (D )3)(t δ +(-9e -t +12e -2t )u(t) 6、 连续周期信号的频谱具有 (A ) 连续性、周期性 (B )连续性、收敛性 (C )离散性、周期性 (D )离散性、收敛性 7、 周期序列2)455.1(0 +k COS π的 周期N 等于 (A ) 1(B )2(C )3(D )4 8、序列和 ()∑∞ -∞ =-k k 1δ等于 (A )1 (B) ∞ (C) ()1-k u (D) ()1-k ku 9、单边拉普拉斯变换()s e s s s F 22 12-+= 的愿函数等于 ()()t tu A ()()2-t tu B ()()()t u t C 2- ()()()22--t u t D 10、信号()()23-=-t u te t f t 的单边拉氏变换()s F 等于 ()A ()()()232372+++-s e s s ()() 2 23+-s e B s
页脚内容1 信号与系统 习题1 一、填空题 1.离散信号()2()k f k k ε=,则该信号的单边Z 变换为 ① 。 2.信号()f t 的傅里叶变换为()F j ω,则(23)f t -的傅里叶变换为 ① 。 3.已知周期信号()cos(230)sin(4+60)f t t t =++,则其周期为 ① s ,基波频率为 ② rad/s 。 4、已知)(1t f 和)(2t f 的波形如下图所示,设)()()(21t f t f t f *=,则=-)1(f ① ,=)0(f ② 。 5、单边拉氏变换()) 4(22+=s s s F ,其反变换()=t f ① 。 6、一离散系统的传输算子为2 3)(22+++=E E E E E H ,则系统对应的差分方程为 ① ,单位脉冲响应为 ② 。 二、单项选择题 1. 下列说法不正确的是______。 A. 每个物理系统的数学模型都不相同。
页脚内容2 B. 同一物理系统在不同的条件下,可以得到不同形式的数学模型。 C. 不同的物理系统经过抽象和近似,有可能得到形式上完全相同的数学模型。 D. 对于较复杂的系统,同一系统模型可有多种不同的数学表现形式。 2. 周期信号f (t )的傅立叶级数中所含有的频率分量是______。 A. 余弦项的奇次谐波,无直流 B. 正弦项的奇次谐波,无直流 C. 余弦项的偶次谐波,直流 D. 正弦项的偶次谐波,直流 3. 当周期矩形信号的脉冲宽度缩小一半时,以下说法正确的是_____。 A. 谱线间隔增加一倍 B. 第一个过零点增加一倍 C. 幅值不变 D. 谱线变成连续的 4. 图3所示的变化过程,依据的是傅立叶变换的_____。 图3 A. 时移性 B. 频移性 C. 尺度变换 D. 对称性 5. 对抽样信号进行恢复,需将信号通过_____。 A. 理想带通滤波器 B. 理想电源滤波器 C. 理想高通滤波器 D. 理想低通滤波器 6. 连续周期信号的频谱有_____。 A. 连续性、周期性 B. 连续性、收敛性 ω (ω )ω π2πτ4πτ(d ) 2πτ-4πτ-o -π?(b ) (a )-1
08《信号与系统习题集》 一、选择题 1.积分式? --+5 5 25)t (2t δ(t-3)dt 等于 ( C ) A .3 B .0 C .16 D .8 2.周期信号f(t)如图所示,其直流分量等于( B ) A .0 B .4 C .2 D .6 3.已知f(t)的波形如图所示,则f(t)*[δ(t -1)+2δ(t +3)]的波形为( C ) 3.已知信号f (t )的波形如图所示,则f (t )的表达式为( D ) A .(t +1)ε(t) B .δ(t -1)+(t -1)ε(t) C .(t -1)ε(t) D .δ(t +1)+(t +1)ε(t) 4、积分 ? ---2 1)1(dt t e t δ等于( B ) A 、1 2-e B 、1 -e C 、 1 2 1-e D 、0 5、下列各时间函数的波形图,正确的表达式是: (A ) )]1()([--t t t εε (B ))1(+t t ε (C ))1()]1()([----t t t t εεε (C ))1()1(+-t t ε
(A) (B) (C) (D) 6、冲激信号具有抽样特性,下列表示式正确的是:(C ) (A ) )()()(0t f dt t t f =?∞ ∞-δ (B ))()()(00t f dt t t t f -=-? ∞ ∞-δ (C )2)2()(2-=++? ∞ ∞--e dt t t e t δ; (D ) 6)6()sin (π πδ=-+?∞ ∞-dt t t t ; 7、写出的图对应的波形的正确函数式是:(D ) (A ) )2(4)2()1([2)]1()([)(-+--++--=t t t t t t f εεεεε (B ))2(4)2()1([2)]1()([)(-++--+--=t t t t t t f εεεεε (C ))2(4)2()1([2)]1()([)(-+-+-+--=t t t t t t f εεεεε (D ))2(4)2()1([2)]1()([)(-+---+--=t t t t t t f εεεεε 8、 题图所示系统是由几个“子系统”组成,各子系统的冲激响应分别为: )()(1t t h ε= (积分器))1()(2-=t t h δ(单位延时))()(3t t h δ-= (倒相器) 系统的冲激响应)(t h 是:(A ) (A ))1()()(--=t t t h εε (B ))1()()(-+=t t t h εε (C ))1()()(+-=t t t h εε (D ))1()1()(---=t t t h εε 9、图示电路的微分方程是:(B ) (A )()()()t u t u t u s c c =+' (B )()()()t u t u t u s c c =+' (C )()()()t u t u t u s c c =+' (D )()()()t u t u t u s c c =+' + — Ω=1R () t u c
精品文档 为 O 信号与系统试题库 一、填空题: 1? 计算 e (t 2) u(t) (t 3) 。 2. 已知X(s) — 士的收敛域为Re{s} 3, X(s) s 3 s 1 的逆变换为 。 3. 信号x(t) (t) u(t) u(t to)的拉普拉斯变换 为 。 4. 单位阶跃响应 g(t )是指系统对输入为 的零状态响应。 5. 系统函数为H (S ) ( 2) ; 3)的LTI 系统是稳 (s 2)(s 3) 定的,贝g H(s)的收敛域 为 。 6. 理想滤波器的频率响应为 H (j ) 2' 100 , 如果输入信号为 0, 100 7 x(t) 10cos(80 t) 5cos(120 t) , 则输出响应y(t) 则描述系统的输入输出关系的微分方程7. 因果LTI 系统的系统函数为 H(s) s 2 s 2 4s 3
精品文档8. 一因果LTI连续时间系统满足: 弟5畔6y(t) d^ 3畔2x(t),则系统的单dt d t dt dt 7 位冲激响应h(t) 为 。 9.对连续时间信号X a(t) 2sin(400 t) 5cos(600 t)进行抽 样,则其奈奎斯特频率为。 10.给定两个连续时间信号X(t)和h(t), 而x(t)与h(t)的卷积表示为y(t),则x(t 1) 与h(t 1)的卷积为 。 11.卷积积分X(t t1)* (t t2) 。 12.单位冲激响应h(t)是指系统对输入为的零状态响应。 13. e 2t u(t)的拉普拉斯变换 为。 14.已知X(s)七七的收敛域为 3 Re{s} 2 , s 2 s 3 X (S)的逆变换为 _____________________ 15.连续LTI系统的单位冲激响应h(t)满足____________________ ,贝g系统稳定。为。 17.设调制信号X(t)的傅立叶变换X(j )已知, 16.已知信号X(t) cos( 0t),则其傅里叶变换
3-1 求图3-1所示对称周期矩形信号的傅利叶级数(三角形式和指数形式)。 图3-1 解 由图3-1可知,)(t f 为奇函数,因而00==a a n 2 1120 11201)cos(2)sin(242,)sin()(4T T T n t n T n E dt t n E T T dt t n t f T b ωωωπωω-== = =?? 所以,三角形式的傅利叶级数(FS )为 T t t t E t f πωωωωπ2,)5sin(51)3sin(31)sin(2)(1111=?? ? ???+++= Λ 指数形式的傅利叶级数(FS )的系数为??? ??±±=-±±==-=ΛΛ,3,1,0,,4,2,0, 021n n jE n jb F n n π 所以,指数形式的傅利叶级数为 T e jE e jE e jE e jE t f t j t j t j t j π ωπππ π ωωωω2,33)(11111= ++- + -=--Λ 3-2 周期矩形信号如图3-2所示。若:
图3-2 2 T -2- 重复频率kHz f 5= 脉宽 s μτ20= 幅度 V E 10= 求直流分量大小以及基波、二次和三次谐波的有效值。 解 对于图3-2所示的周期矩形信号,其指数形式的傅利叶级数(FS )的系数 ?? ? ??=??? ??== = =??--22 sin 12,)(1112212211τωττωππωτ τ ωωn Sa T E n n E dt Ee T T dt e t f T F t jn T T t jn n 则的指数形式的傅利叶级数(FS )为 ∑∑∞ -∞ =∞ -∞ =?? ? ? ?== n t jn n t jn n e n Sa T E e F t f 112 )(1ωωτωτ 其直流分量为T E n Sa T E F n ττωτ=?? ? ??=→2lim 100 基波分量的幅度为??? ? ? ?= +-2sin 2111τωπE F F 二次谐波分量的幅度为??? ? ? ?= +-22sin 122τωπE F F 三次谐波分量的幅度为??? ? ? ?=+-23sin 32133τωπE F F 由所给参数kHz f 5=可得
期末试题一 、选择题(每小题可能有一个或几个正确答案,将正确得题号填入[ ]内) 1.f (5-2t )就是如下运算得结果————————( ) (A )f (-2t )右移5 (B )f (-2t )左移5 (C )f (-2t )右移 2 5 (D )f (-2t )左移25 2.已知)()(),()(21t u e t f t u t f at -==,可以求得=)(*)(21t f t f —————() (A )1-at e - (B )at e - (C ))1(1at e a -- (D )at e a -1 3.线性系统响应满足以下规律————————————( ) (A )若起始状态为零,则零输入响应为零。 (B )若起始状态为零,则零状态响应为零。 (C )若系统得零状态响应为零,则强迫响应也为零。 (D )若激励信号为零,零输入响应就就是自由响应。 4.若对f (t )进行理想取样,其奈奎斯特取样频率为f s ,则对)23 1 (-t f 进行取 样,其奈奎斯特取样频率为————————( ) (A )3f s (B ) s f 31 (C )3(f s -2) (D ))2(3 1 -s f 5.理想不失真传输系统得传输函数H (jω)就是 ————————( ) (A ) 0j t Ke ω- (B )0 t j Ke ω- (C )0 t j Ke ω-[]()()c c u u ωωωω+-- (D )00 j t Ke ω- (00,,,c t k ωω为常数) 6.已知Z 变换Z 1 311 )]([--= z n x ,收敛域3z >,则逆变换x (n )为——( ) (A ))(3n u n (C )3(1)n u n - (B ))(3n u n -- (D ))1(3----n u n 二.(15分) 已知f(t)与h(t)波形如下图所示,请计算卷积f(t)*h(t),并画出f(t)*h(t)波形。
《信号与系统》复习题 1. 已知f(t)如图所示,求f(-3t-2)。 2. 已知f(t),为求f(t0-at),应按下列哪种运算求得正确结果?(t0和a 都为正值) 3.已知f(5-2t)的波形如图,试画出f(t)的波形。 解题思路:f(5-2t)?????→?=倍 展宽乘22/1a f(5-2×2t)= f(5-t) ??→?反转f(5+t)??→?5 右移 f(5+t-5)= f(t) 4.计算下列函数值。 (1) dt t t u t t )2(0 0--?+∞ ∞-) (δ (2) dt t t u t t )2(0 --?+∞ ∞-) (δ (3) dt t t e t ?+∞ ∞ --++)(2)(δ
5.已知离散系统框图,写出差分方程。 解:2个延迟单元为二阶系统,设左边延迟单元输入为x(k) 左○ ∑:x(k)=f(k)-a 0*x(k-2)- a 1*x(k-1)→ x(k)+ a 1*x(k-1)+ a 0*x(k-2)=f(k) (1) 右○ ∑: y(k)= b 2*x(k)- b 0*x(k-2) (2) 为消去x(k),将y(k)按(1)式移位。 a 1*y(k-1)= b 2* a 1*x(k-1)+ b 0* a 1*x(k-3) (3) a 0*y(k-2)= b 2* a 0*x(k-2)-b 0* a 0*x(k-4) (4) (2)、(3)、(4)三式相加:y(k)+ a 1*y(k-1)+ a 0*y(k-2)= b 2*[x(k)+ a 1*x(k-1)+a 0*x(k-2)]- b 0*[x(k-2)+a 1*x(k-3)+a 0*x(k-4)] ∴ y(k)+ a 1*y(k-1)+ a 0*y(k-2)= b 2*f(k)- b 0*f(k-2)═>差分方程 6.绘出下列系统的仿真框图。 )()()()()(10012 2t e dt d b t e b t r a t r dt d a t r dt d +=++ 7.判断下列系统是否为线性系统。 (2) 8.求下列微分方程描述的系统冲激响应和阶跃响应。 )(2)(3)(t e dt d t r t r dt d =+
信科0801《信号与系统》复习参考练习题 参考答案 信号与系统综合复习资料 考试方式:闭卷 考试题型:1、简答题(5个小题),占30分;计算题(7个大题),占70分。 一、简答题: 1.dt t df t f x e t y t ) ()()0()(+=-其中x(0)是初始状态, 为全响应,为激励,)()(t y t f 试回答该系统是否是线性的?[答案:非线性] 2.)()(sin )('t f t ty t y =+试判断该微分方程表示的系统是线性的还是非线性的, 是时变的还是非时变的?[答案:线性时变的] 3.已知有限频带信号)(t f 的最高频率为100Hz ,若对)3(*)2(t f t f 进行时域取样, 求最小取样频率s f =?[答案:400s f Hz =] 4.简述无失真传输的理想条件。[答案:系统的幅频特性为一常数,而相频特性为通过原点的直线] 5.求[]?∞ ∞ --+dt t t e t )()('2δδ的值。[答案:3] 6.已知)()(ωj F t f ?,求信号)52(-t f 的傅立叶变换。 [答案:521(25)()22 j f t e F j ωω --?]
7.已知)(t f 的波形图如图所示,画出)2()2(t t f --ε的波形。 [答案: ] 8.已知线性时不变系统,当输入)()()(3t e e t x t t ε--+=时,其零状态响应为 )()22()(4t e e t y t t ε--+=,求系统的频率响应。[答案: ()) 4)(2(52)3(++++ωωωωj j j j ] 9.求象函数2 ) 1(3 2)(++= s s s F ,的初值)0(+f 和终值)(∞f 。 [答案:)0(+f =2,0)(=∞f ] 10.若LTI 离散系统的阶跃响应为)(k g ,求其单位序列响应。 其中:)()2 1 ()(k k g k ε=。 [答案:1111 ()()(1)()()()(1)()()(1)222 k k k h k g k g k k k k k εεδε-=--=--=--] 11.已知()1 1 , 0,1,20 , k f k else ==??? ,()2 1 , 0,1,2,3 0 , k k f k else -==??? 设()()()12f k f k f k =*,求()3?f =。[答案:3] 12.描述某离散系统的差分方程为()()()122()y k y k y k f k +---=
《信号与系统》复习题 1.已知 f(t) 如图所示,求f(-3t-2) 。 2.已知 f(t) ,为求 f(t0-at) ,应按下列哪种运算求得正确结果?(t0 和 a 都为正值)
3.已知 f(5-2t) 的波形如图,试画出f(t) 的波形。 解题思路:f(5-2t)乘a 1 / 2展宽 2倍f(5-2 × 2t)= f(5-t)
反转 右移 5 f(5+t) f(5+t-5)= f(t) 4.计算下列函数值。 ( 1) ( 2) ( t ) t 0 )dt t 0 u(t 2 (t t 0)u(t 2t 0 )dt ( 3) (e t t ) (t 2)dt 5.已知离散系统框图,写出差分方程。 解: 2 个延迟单元为二阶系统,设左边延迟单元输入为 x(k) ∑ 0 1 1) → 左○ :x(k)=f(k)-a *x(k-2)- a*x(k- x(k)+ a 1*x(k-1)+ a 0*x(k-2)=f(k) (1) ∑ y(k)= b 2*x(k)- b 0*x(k-2) (2) 右○ : 为消去 x(k) ,将 y(k) 按( 1)式移位。 a 1*y(k-1)= b 2 * a 1*x(k-1)+ b * a 1*x(k-3) (3) a 0*y(k-2)= b 2 * a 0*x(k-2)-b 0* a 0*x(k-4) (4) (2) 、( 3)、( 4)三式相加: y(k)+ a 1*y(k-1)+ a 0*y(k-2)= b *[x(k)+ a 1 *x(k-1)+a *x(k-2)]- b *[x(k-2)+a 1*x(k-3)+a *x(k-4)] 2 0 0 0 ∴ y(k)+ a 1 *y(k-1)+ a *y(k-2)= b 2 *f(k)- b *f(k-2) ═ >差分方程
信科0801《信号与系统》复习参考练习题一、单项选择题:
14、已知连续时间信号,) 2(100)2(50sin )(--=t t t f 则信号t t f 410cos ·)(所占有的频带宽度为() A .400rad /s B 。200 rad /s C 。100 rad /s D 。50 rad /s
f如下图(a)所示,其反转右移的信号f1(t) 是() 15、已知信号)(t f如下图所示,其表达式是() 16、已知信号)(1t A、ε(t)+2ε(t-2)-ε(t-3) B、ε(t-1)+ε(t-2)-2ε(t-3) C、ε(t)+ε(t-2)-ε(t-3) D、ε(t-1)+ε(t-2)-ε(t-3) 17、如图所示:f(t)为原始信号,f1(t)为变换信号,则f1(t)的表达式是() A、f(-t+1) B、f(t+1) C、f(-2t+1) D、f(-t/2+1)
18、若系统的冲激响应为h(t),输入信号为f(t),系统的零状态响应是( ) 19。信号)2(4sin 3)2(4cos 2)(++-=t t t f π π 与冲激函数)2(-t δ之积为( ) A 、2 B 、2)2(-t δ C 、3)2(-t δ D 、5)2(-t δ ,则该系统是()>-系统的系统函数.已知2]Re[,6 51)(LTI 202s s s s s H +++= A 、因果不稳定系统 B 、非因果稳定系统 C 、因果稳定系统 D 、非因果不稳定系统 21、线性时不变系统的冲激响应曲线如图所示,该系统微分方程的特征根是( ) A 、常数 B 、 实数 C 、复数 D 、实数+复数 22、线性时不变系统零状态响应曲线如图所示,则系统的输入应当是( ) A 、阶跃信号 B 、正弦信号 C 、冲激信号 D 、斜升信号
重庆大学信号与线性系统期末考试试题 一、填空题:(30分,每小题3分) 1. =-? ∞ ∞ -dt t t )()5cos 2(δ 。 2. ()dt t e t 12-?+∞ ∞ --δ= 。 3. 已知 f (t )的傅里叶变换为F (j ω), 则f (2t -3)的傅里叶变换为 。 4. 已知 6 51 )(2 +++= s s s s F ,则=+)0(f ; =∞)(f 。 5. 已知 ω ωπδεj t FT 1 )()]([+=,则=)]([t t FT ε 。 6. 已知周期信号 )4sin()2cos()(t t t f +=,其基波频率为 rad/s ; 周期为 s 。 7. 已知 )5(2)2(3)(-+-=n n k f δδ,其Z 变换 =)(Z F ;收敛域为 。 8. 已知连续系统函数1342 3)(2 3+--+= s s s s s H ,试判断系统的稳定性: 。 9.已知离散系统函数1.07.02 )(2+-+=z z z z H ,试判断系统的稳定性: 。 10.如图所示是离散系统的Z 域框图,该系统的系统函数H(z)= 。 二.(15分)如下方程和非零起始条件表示的连续时间因果LTI 系统,
?????==+=++-- 5 )0(',2)0() (52)(4522y y t f dt df t y dt dy dt y d 已知输入 )()(2t e t f t ε-=时,试用拉普拉斯变换的方法求系统的零状态响应 )(t y zs 和零输入响应)(t y zi ,0≥t 以及系统的全响应),(t y 0≥t 。 三.(14分) ① 已知2 36 62)(22++++=s s s s s F ,2]Re[->s ,试求其拉氏逆变换f (t ); ② 已知) 2(2 35)(2>+-=z z z z z X ,试求其逆Z 变换)(n x 。 四 (10分)计算下列卷积: 1. }1,0,6,4,3{}4,1,2,1{)()(21--*=*k f k f ; 2. )(3)(23t e t e t t εε--* 。
信号与系统 习题1 一、填空题 1、离散信号()2()k f k k ε=,则该信号得单边Z 变换为 ① 。 2、信号()f t 得傅里叶变换为()F j ω,则(23)f t -得傅里叶变换为 ① 。 3、已知周期信号()cos(230)sin(4+60)f t t t =++o o ,则其周期为 ① s,基波频率为 ② rad/s 。 4、已知)(1t f 与)(2t f 得波形如下图所示,设)()()(21t f t f t f *=,则=-)1(f ① ,=)0(f ② 。 5、单边拉氏变换()) 4(2 2+= s s s F ,其反变换()=t f ① 。 6、一离散系统得传输算子为2 3)(22+++=E E E E E H ,则系统对应得差分方程为 ① , 单位脉冲响应为 ② 。 二、单项选择题 1、 下列说法不正确得就是______。 A 、 每个物理系统得数学模型都不相同。 B 、 同一物理系统在不同得条件下,可以得到不同形式得数学模型。 C 、 不同得物理系统经过抽象与近似,有可能得到形式上完全相同得数学模型。 D 、 对于较复杂得系统,同一系统模型可有多种不同得数学表现形式。 2、 周期信号f (t )得傅立叶级数中所含有得频率分量就是______。 A 、 余弦项得奇次谐波,无直流 B 、 正弦项得奇次谐波,无直流 C 、 余弦项得偶次谐波,直流 D 、 正弦项得偶次谐波,直流 3、 当周期矩形信号得脉冲宽度缩小一半时,以下说法正确得就是_____。 A 、 谱线间隔增加一倍 B 、 第一个过零点增加一倍 C 、 幅值不变 D 、 谱线变成连续得 4、 图3所示得变化过程,依据得就是傅立叶变换得_____。
1. 理想低通滤波器是(C ) A 因果系统 B 物理可实现系统 C 非因果系统 D 响应不超前于激励发生的系统 2. 某系统的系统函数为)(s H ,若同时存在频响函数)(ωj H ,则该系统必须满足条件(D ) A 时不变系统 B 因果系统 C 线性系统 D 稳定系统 3一个LTI 系统的频率响应为3) 2(1)(+=ωωj j H ,该系统可由(B ) A 三个一阶系统并联 B 三个一阶系统级联 C 一个二阶系统和一个一阶系统并联 D 以上全对 4.下列关于冲激函数性质的表达式不正确的是(A ) A )(1)(t a at δδ= B )()0()()(t f t t f δδ= C )()(t d t εττδ=?∞- D )()(t t δδ=- 5. 6. 7.微分方程f f y y y y 225)1()1()2()3(+=+++所描述系统的状态方程和输出方程为(A ) A []x y t f x X 012)(100512100010=??????????+??????????---=? B []x y t f x X 012)(100215100010=???? ??????+??????????---=? C []x y t f x X 210)(100512100010=??????????+??????????---=? D []x y t f x X 210)(100215100010=???? ??????+??????????---=? 8. 满足傅氏级数收敛条件时,周期信号)(t f 的平均功率(D ) A 大于各谐波分量平均功率之和 B 不等于各谐波分量平均功率之和 C 小于各谐波分量平均功率之和 D 等于各谐波分量平均功率之和 9.连续时间信号)1000cos(]50)100sin([)(t t t t f ?=,该信号的频带为(B ) A 100 rad/s B 200 rad/s C 400rad/s D 50 rad/s 10. 若)(t f 为实信号,下列说法中不正确的是(C ) A 该信号的幅度谱为偶对称 B 该信号的相位谱为奇对称
第一次 1.1 画出下列各个信号的波形[式中()()r t t t ε=为斜升函数] 知识要点:本题主要考查阶跃函数和单位阶跃序列的性质,包括()t ε和()k ε的波形特性以及它们与普通函数结合时的波形变化特性。 解题方法:①首先考虑各信号中普通函数的波形特点,再考虑与()t ε或()k ε结合时的变化情况; ②若()t f 只是普通信号与阶跃信号相乘,则可利用()t ε或()k ε的性质直接画出 0>t 或0≥k 部分的普通函数的波形; ③若()t f 是普通函数与阶跃信号组合成的复合信号,则需要考虑普通函数值域及其对应的区间。 (1) ()()()t t t f εsin = 解:正弦信号周期ππ ω π 21 22== = T 1 -1 2ππ t () f t (2) ()()sin f t t επ= 解:()0 sin 0 1 sin 0 t f t t ππ?,
正弦信号周期22== π π T 10-1-1 -212 -1 -2 12 1 () f t t t () sin t π (3) ()()cos f t r t = 解:()0 cost 0 cos cos 0f t t t ?, 正弦信号周期221 T π π= = 1 0-1t () cos t π 2π π -2π -1 () f t 0 t π 2π π -2π -
(4) ()()k k k f ε)12(+= -1 -2 1 2 k 3 13 5() f k …… …… (5) ()()()1 11k f k k ε+??=+-? ? -2 -4 1 2 k 3 12 () f k …… …… 4 5 -1 -3 1.2 画出下列各信号的波形[式中()()r t t t ε=为斜升函数] 知识要点:本题主要考查阶跃函数和单位阶跃序列的性质,包括()t ε和()k ε的波形特性以及它们与普通函数结合时的波形变化特性。 解题方法:①首先考虑各信号中普通函数的波形特点,再考虑与()t ε或()k ε结合时的变化情况; ②若()t f 只是普通信号与阶跃信号相乘,则可利用()t ε或()k ε的性质直接画出 0>t 或0≥k 部分的普通函数的波形;
信号与系统期末考试试题6 课程名称: 信号与系统 一、选择题(共10题,每题3分 ,共30分,每题给出四个答案,其中只有一个正确的) 1、 卷积f 1(k+5)*f 2(k-3) 等于 。 (A )f 1(k)*f 2(k) (B )f 1(k)*f 2(k-8)(C )f 1(k)*f 2(k+8)(D )f 1(k+3)*f 2(k-3) 2、 积分dt t t ?∞ ∞--+)21()2(δ等于 。 (A )1.25(B )2.5(C )3(D )5 3、 序列f(k)=-u(-k)的z 变换等于 。 (A ) 1 -z z (B )- 1 -z z (C ) 1 1-z (D ) 1 1--z 4、 若y(t)=f(t)*h(t),则f(2t)*h(2t)等于 。 (A ) )2(4 1t y (B ) )2(2 1t y (C ) )4(4 1t y (D ) )4(21t y 5、 已知一个线性时不变系统的阶跃相应g(t)=2e -2t u(t)+)(t δ,当输入f(t)=3e —t u(t)时,系 统的零状态响应y f (t)等于 (A )(-9e -t +12e -2t )u(t) (B )(3-9e -t +12e -2t )u(t) (C ))(t δ+(-6e -t +8e -2t )u(t) (D )3)(t δ +(-9e -t +12e -2t )u(t) 6、 连续周期信号的频谱具有 (A ) 连续性、周期性 (B )连续性、收敛性 (C )离散性、周期性 (D )离散性、收敛性 7、 周期序列2)455.1(0 +k COS π的 周期N 等于 (A ) 1(B )2(C )3(D )4 8、序列和 ()∑∞ -∞ =-k k 1δ等于 (A )1 (B) ∞ (C) ()1-k u (D) ()1-k ku 9、单边拉普拉斯变换()s e s s s F 22 12-+= 的愿函数等于 ()()t tu A ()()2-t tu B ()()()t u t C 2- ()()()22--t u t D 10、信号()()23-=-t u te t f t 的单边拉氏变换()s F 等于 ()A ()()()232372+++-s e s s ()()2 23+-s e B s
1,某系统(7,4)码 ) ()(01201230123456c c c m m m m c c c c c c c ==c 其三位校验 位与信息位的关系为: 231013210 210c m m m c m m m c m m m =++?? =++??=++? (1)求对应的生成矩阵和校验矩阵; (2)计算该码的最小距离; (3)列出可纠差错图案和对应的伴随式; (4)若接收码字R =1110011,求发码。 解:(1) 10001100 10001100101110001101G ?? ??? ?=?? ???? 101110011100100111001H ?? ??=?????? (2) d min =3 (3) (4). RH T =[001] 接收出错 E =0000001 R+E=C = 1110010 (发码) 2. 已知(),X Y 的联合概率(),p x y 为: 求()H X ,()H Y ,(),H X Y ,();I X Y 解: (0)2/3p x == (1)1/3p x == (0)1/3p y == (1)2/3p y == ()()(1/3,2/3)H X H Y H ===0.918 bit/symbol (),(1/3,1/3,1/3)H X Y H ==1.585 bit/symbol 01 X Y 011/31/30 1/3
();()()(,)I X Y H X H Y H X Y =+-=0.251 bit/symbol 3.一阶齐次马尔可夫信源消息集},,{321a a a X ∈, 状态集},,{321S S S S ∈,且令3 ,2,1,==i a S i i ,条件转移概率为 [ ] ?? ?? ? ?????=03132313131214141)/(i j S a P ,(1)画出该马氏链的状态转移图; (2)计算信源的极限熵。 解:(1) (2)??? ????=++=+=++=++132132 311212331 2311411332231141w w w w w w w w w w w w w w →??? ??===3.03.04.03 21w w w H(X|S 1) =H (1/4,1/4,1/2)=1.5比特/符号 H(X|S 2)=H (1/3,1/3,1/3)=1.585比特/符号 H(X|S 3)=H (2/3,1/3)= 0.918比特/符号 () 3 |0.4 1.50.3 1.5850.30.918 1.3511 H w H X S i i i ==?+?+?=∑∞=比特/符号 4.若有一信源?? ? ???=???? ??2.08.021x x P X ,每秒钟发出2.55个信源符号。 将此信源的输出符号送入某一个二元信道中进行传输 (假设信道是无噪无损的,容量为1bit/二元符号), 而信道每秒钟只传递2个二元符号。 (1) 试问信源不通过编码(即x 10,x 2 1在信道中传输) (2) 能否直接与信道连接? (3) 若通过适当编码能否在此信道中进行无失真传输?
第1章 习题答案 1-1 题1-1图所示信号中,哪些是连续信号?哪些是离散信号?哪些是周期信号?哪些是非周期信号?哪些是有始信号? 解: ① 连续信号:图(a )、(c )、(d ); ② 离散信号:图(b ); ③ 周期信号:图(d ); ④ 非周期信号:图(a )、(b )、(c ); ⑤有始信号:图(a )、(b )、(c )。 1-2 已知某系统的输入f(t)与输出y(t)的关系为y(t)=|f(t)|,试判定该系统是否为线性时不变系统。 解: 设T 为此系统的运算子,由已知条件可知: y(t)=T[f(t)]=|f(t)|,以下分别判定此系统的线性和时不变性。 ① 线性 1)可加性 不失一般性,设f(t)=f 1(t)+f 2(t),则 y 1(t)=T[f 1(t)]=|f 1(t)|,y 2(t)=T[f 2(t)]=|f 2(t)|,y(t)=T[f(t)]=T[f 1(t)+f 2(t)]=|f 1(t)+f 2(t)|,而 |f 1(t)|+|f 2(t)|≠|f 1(t)+f 2(t)| 即在f 1(t)→y 1(t)、f 2(t)→y 2(t)前提下,不存在f 1(t)+f 2(t)→y 1(t)+y 2(t),因此系统不具备可加性。 由此,即足以判定此系统为一非线性系统,而不需在判定系统是否具备齐次性特性。 2)齐次性 由已知条件,y(t)=T[f(t)]=|f(t)|,则T[af(t)]=|af(t)|≠a|f(t)|=ay(t) (其中a 为任一常数) 即在f(t)→y(t)前提下,不存在af(t)→ay(t),此系统不具备齐次性,由此亦可判定此系统为一非线性系统。 ② 时不变特性 由已知条件y(t)=T[f(t)]=|f(t)|,则y(t-t 0)=T[f(t-t 0)]=|f(t-t 0)|, 即由f(t)→y(t),可推出f(t-t 0)→y(t-t 0),因此,此系统具备时不变特性。 依据上述①、②两点,可判定此系统为一非线性时不变系统。 1-3 判定下列方程所表示系统的性质: )()()]([)()(3)(2)(2)()()2()()(3)(2)()()()()() (2''''''''0t f t y t y d t f t y t ty t y c t f t f t y t y t y b dx x f dt t df t y a t =+=++-+=+++=? 解:(a )① 线性 1)可加性 由 ?+=t dx x f dt t df t y 0)()()(可得?????→+=→+=??t t t y t f dx x f dt t df t y t y t f dx x f dt t df t y 01122011111)()()()()()()()()()(即即 则 ???+++=+++=+t t t dx x f x f t f t f dt d dx x f dt t df dx x f dt t df t y t y 0212102201121)]()([)]()([)()()()()()( 即在)()()()()()()()(21212211t y t y t f t f t y t f t y t f ++前提下,有、→→→,因此系统具备可加性。 2)齐次性 由)()(t y t f →即?+=t dx x f dt t df t y 0)()()(,设a 为任一常数,可得 )(])()([)()()]([)]([000t ay dx x f dt t df a dx x f a dt t df a dx x af t af dt d t t t =+=+=+??? 即)()(t ay t af →,因此,此系统亦具备齐次性。 由上述1)、2)两点,可判定此系统为一线性系统。
“信号与系统”2003/2004第二学期 期末考试 B 卷 一、给定某系统的微分方程为)()(2)(6)(5)(22t e t e dt d t r t r dt d t r dt d +=++,初始状态为 2)(0=- =t t r dt d ,2)(0=-=t t r ,试求当)()(t u e t e t -=时的完全响应。(12分) 二、已知f (t )的傅里叶变换为)(1ωF ,求f (6-2t )的傅里叶变换)(2ωF 。(8分) 三、(1)求)]2()1()[1()(----=t u t u t t f 的单边拉普拉斯变换。 (2)求?? ? ??+s s 2ln 的拉普拉斯反变换。(16分) 四、已知某因果稳定系统的系统函数为6 51 )(2+++= s s s s H 。 (1)求系统的单位冲激响应)(t h ; (2)画出系统的零、极点分布; (3)粗略画出系统的频率响应特性。 (4)若有输入信号t t e sin 2)(=,求系统的稳态响应。(14分) 五、如下图中,cos(w 0 t ) 是自激振荡器,理想低通滤波器H 1(w )为 0)]2()2([)(1jwt e w u w u w H -Ω--Ω+= 且w 0 ≥ Ω (1)虚框中系统的冲激响应h(t); (2)若输入e(t) 为)cos()sin(02 t w t t ?? ? ??ΩΩ时,求输出r(t)。(10分) 六、已知LTI 系统的单位样值响应)()(n u n h n α=,10<<α,激励序列)()(n u n x n β=, 10<<β,且αβ≠,求系统的输出序列)()()(n h n x n y *=。(8分) 七、已知因果序列的z 变换) 21)(1(1)(112 1------++=z z z z z X ,求序列的初值x (0)和终值)(∞x 。(8 分)