偏航系统
偏航系统
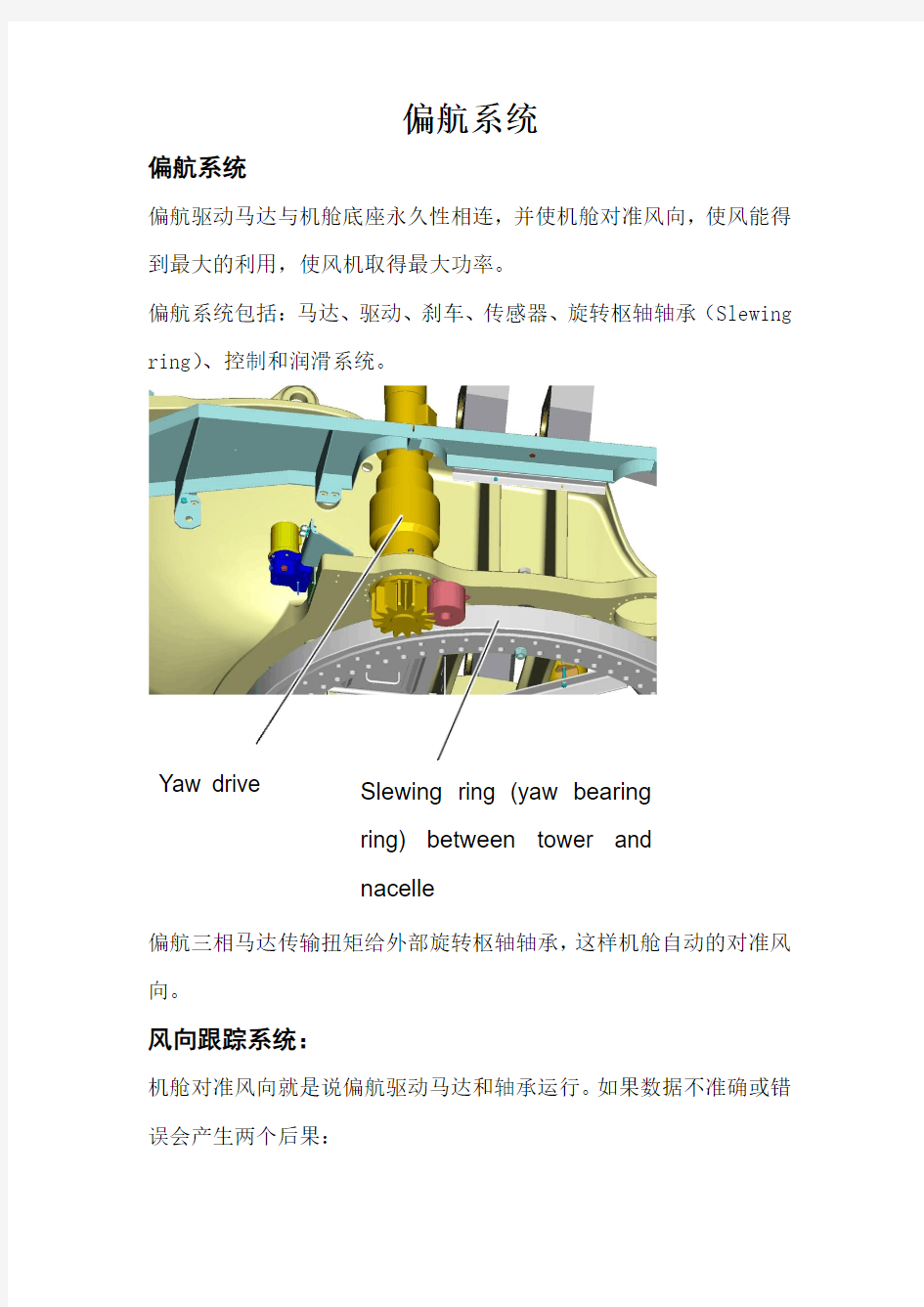
偏航驱动马达与机舱底座永久性相连,并使机舱对准风向,使风能得到最大的利用,使风机取得最大功率。
偏航系统包括:马达、驱动、刹车、传感器、旋转枢轴轴承(Slewing ring )、控制和润滑系统。
偏航三相马达传输扭矩给外部旋转枢轴轴承,这样机舱自动的对准风向。
风向跟踪系统:
机舱对准风向就是说偏航驱动马达和轴承运行。如果数据不准确或错误会产生两个后果:
Yaw drive Slewing ring (yaw bearing
ring) between tower and
nacelle
1.转子叶片不会以最合适的角度方向来对准风向
2.转子的运用负荷不明确
所以错误的数据引起叶片不合适的角度从而导致机械金属疲劳
GE1.5S风机一般有3个驱动器,GE1.5SL有4个偏航驱动器。通过变速齿轮(变速率1:1220)将感应制动发电机的力矩传导到四接触点轴承的外齿上。
运行时,机舱持续运行和旋转方向是由风向仪(偏航传感器)提供数据,再经过PLC控制系统执行。
风向跟踪系统一般运行在风机切入风速之下也就是说在风电之前,风速大于或等于2.5米/秒偏航马达开始工作。机舱偏航速度大约0.5度/秒,转一圈大约12分钟。
偏航驱动马达
机舱一般安装3个偏航马达,马达直接安装在偏航驱动器上面偏航驱动由马达驱动变速器小齿轮组成
偏航驱动马达有一个加热器(寒冷地区使用)
偏航驱动变速器:
偏航驱动轴承使用四级行星齿轮,三个电机必须一致,由三相刹车马达提供功率。
在变速器的底部安装了小齿轮
偏航刹车系统:
偏航刹车系统是为了使机舱对准风向防止空气动力学上的旋转摆动,这些摆动会导致偏航变速齿轮在较高负荷时磨损。
机械刹车(持续运行)由18个活塞组成。
它的分布是前后各有6个,左右各有3个。如果机舱未对准风的方向,电动制动器便断电,驱动器因此缓慢下来。如果持续和机械偏航可能提供一个充足刹车力,电器刹车必须确认机舱是在一个正确的位置。
Yaw drive motors
在偏航时,刹车是释放的不工作的,这时偏航马达转动产生一个驱动力。当驱动力大于刹车摩擦力时机舱跟踪风向。而当偏航停止时偏航刹车工作。
偏航刹车轴套: 偏航刹车轴套一般有2种类型。一种是青铜、一种是钢的。 一些风机系统也安装塑料刹车轴套,这是因为噪音
在偏航刹车盘上有2个刹车片探测孔可以探测摩擦片的厚度来保证偏航刹车的正常工作
Pistons on longitudinal axis
风向仪: 风向仪采集连续的数据和方向,数据被传输到PLC 偏航控制系统,
机
Plastic pins (dual spring assemblies)
Dual spring disk assembly
舱根据这些数据判断旋转方向。
风向仪被安装在机舱顶部机架上。
偏航传感器:
偏航控制系统一般由两个工业的传感器,传感器被用来探测机舱头旋转的方向,如果信号收集N1,N2,N1,N2……说明机舱头转到一个方向,如果信号收集N2,N1,N2, N1……说明机舱头转到另一个方向。装传感器的另一个目的是计算偏航外齿移动齿的齿数,从而判断偏航系统是否正常。在安装时机舱头被校正到正北位置(0°位置) 优点:
1. 精确地计算出机舱位置
2. 解缆
3. 阴影停机
Wind vane
解缆:
风机一般安装一个电缆解缆装置
解缆一般自动被执行,如果机舱在同一方向转动超过2.5圈,当电缆扭转到达一个设定的值,偏航控制系统的传感器探测到扭缆的数值则机舱偏航往相反的方向旋转,直到电缆完全解缆。这样能预防电缆可能的损坏。
另外一种情况它还安装了一个偏航限位开关,当计算到2。5圈时小钢绳拉出铁球在管上,当钢绳被拉紧时触发偏航限位开关,控制系统转动机舱回0°位置。
备注:
通常解缆是由偏航传感器探测到2。5圈时由控制系统自动执行。 偏航限位开关只有在偏航传感器失效的时候才执行。
Sensors
偏航的润滑:
充分持续的润滑优点:
1、
防止过早的磨损 2、 保持最小的维护成本 如何确认偏航持续润滑的方法:
1、
油取样 2、 2,4,6,8,年油必须更换,正确的油分析可以避免偏航损坏,而拆除偏航系统
变速箱自动润滑系统:
一般偏航系统使用自动润滑器,温度控制在25~60度之间。 机器上有二个润滑点在工作
Yaw stop switch activated
Yaw stop switch at rest
在偏航时,润滑轴承只需7秒
Central lubrication
Foamed plastic lubricating pinion
手动润滑:
手动润滑用刷子或油枪刷偏航外齿,每6个月。 偏航轴承用油枪每6个月润滑,而且旋转枢轴轴承上的偏航刹车表面每年用刷子刷一遍
偏航系统的故障:
20 Cables twisted to the right(电缆右扭转)
说明:电动机舱已经到达预制动或重绕的位置。通过反转,重绕操作被自动执行,从而防止电缆被剪切掉。
矫正措施:PLC 使机舱自动倒转
21 Cables twisted to the left(电缆左扭转)
说明:电动机舱已经到达预制动或重绕的位置。通过反转,重绕操作被自动执行,从而防止电缆被剪切掉。
Lubricant feed
矫正措施:PLC使机舱自动倒转
22 Yaw drive in end position(偏航驱动停机位置)
说明:当在计数器中指定的偏航位置数值超出时,该状态信息被触发。矫正措施:PLC使机舱自动倒转
31 Timeout of yaw counter(超时偏航计数器)
说明:尽管有转动的偏航系统,在偏航计数器的入口出信号没有变化。矫正措施:发现并解决问题:e.g.传感器故障或脏,错误的调整,损坏,PLC模块故障
42 Incorrect yawing direction(错误的转动偏航方向)
说明:偏航按照错误的方向转动。偏航被阻塞
矫正措施:发现并解决问题:可能是一相连接错误。
60 Yaw stop switch acticated(偏航限位开关启动)
说明:绞合电缆已经启动了电缆扭转拉线开关。
矫正措施:定点检查,手动执行解缆
82 Yaw drive motor overheated(偏航电动机过热)
说明:偏航电动机上的3台PTC温度传感器中的其中一台报告过热的温度(>155℃)。
矫正措施:定点检查,确认是否是故障在Ptc或在PLC,或马达真的过热
222 Yaw control drift(偏航失控)
说明:电动机舱在没有激活偏航的情况下移动
矫正措施:偏航刹车工作错误,必须检查。偏航驱动的电磁刹车工作
错误。
酒泉职业技术学院 毕业设计 题目:风力发电机组偏航系统的控制学院:酒泉职业技术学院 班级:10级风电(1)班 姓名:李世辉 指导教师:赵玉丽 完成日期:2012年12月20日
摘要 随着社会经济的发展,人们对电的需求日益提高。以石油、煤炭、天然气为的常规能源,不仅资源有限,而且还会在使用中造成严重的环境污染。在我们进入21世纪的今天,世界能源结构正在孕育着重大的转变,即由矿物能源系统向以可再生能源为基础的可持续能源系统转变。风能作为取之不尽,用之不竭的绿色清洁能源己受到全世界的重视,而风力机的偏航系统能使风能得到更好的利用,所以偏航系统的设计非常的重要。 本设计首先分析了偏航系统的工作原理,然后以三菱PLC作为控制器,触摸屏为监控器,设计了硬件系统模块,整个硬件系统采用了闭环控制,并说明了开环控制的缺点。根据偏航控制要求,设计了自动对风控制算法,自动解缆控制算法,90°背风控制算法,不仅提高了风能利用率,增大了发电效率,而且还保证了整个系统的安全性、稳定性,让风力发电机更好的运行。 关键词:偏航系统硬件设计自动对风自动解缆
目录 摘要 (1) 第一章概述.......................................................错误!未定义书签。 1.1设计背景 (2) 1.2设计研究意义 (2) 1.3国内外风力发电概况 (2) 1.3.1世界风电发展 (2) 1.3.2我国风电发展 (3) 第二章偏航控制系统功能简介和原理 (3) 2.1偏航控制系统的功能............................................错误!未定义书签。 2.2风力发电机组偏航控制原理......................................错误!未定义书签。 第三章偏航系统的控制过程.........................................错误!未定义书签。 3.1自动偏航控制..................................................错误!未定义书签。 3.1.1自动偏航传感器ASS状态...................................错误!未定义书签。 3.1.2参数说明和电机运行状态...................................错误!未定义书签。 3.1.3偏航控制流程图..........................................错误!未定义书签。 3.1.4偏航电机电气连接原理图..................................错误!未定义书签。 3.1.5偏航对风控制PLC程序....................................错误!未定义书签。 3.290°侧风控制................................................错误!未定义书签。 3.3人工偏航控制.................................................错误!未定义书签。 3.4自动解缆控制.................................................错误!未定义书签。 第四章总结 (5) 参考文献 (12) 致谢 (13)
风力发电机组偏航系统原理及维护 UP77/82 风电机组偏航控制及维护
目录 1、偏航系统简介 2、偏航系统工作原理 3、偏航系统控制思想 4、偏航系统故障 5、偏航系统维护 偏航系统简介 偏航系统功能 使机舱轴线能够跟踪变化稳定的风向; 当机舱至塔底引出电缆到达设定的扭缆角度后自动解缆。风向标 风向标的接线包括四根线,分别是两根电 源线,两个信号(我们实际的) 线和两根加热线; 目前每台机组上有两个风向标; 风向标的N指向机尾; 偏航取一分钟平均风向。 偏航系统结构 4个偏航电机
偏航刹车片(10 个)偏航内齿 塔筒偏航大齿圈侧面轴承 偏航轴承 内摩擦的滑动轴承系统; 内齿圈设计。 偏航驱动电机: 数量:4个 对称布置,由电机驱动小齿轮带动整个 机舱沿偏航轴承转动,实现机舱的偏航; 内部有温度传感器,控制绕组温度 偏航电子刹车装置, 偏航齿轮箱:行星式减速齿轮箱 偏航小齿轮 偏航编码器 绝对值编码器,记录偏
航位置; 偏航轴承齿数与编码器码盘齿数之比; 左右限位开关,常开触点; 左右安全链限位开关,常闭触点; 偏航刹车片 数量:10个 液压系统偏航刹车控制; 偏航系统未工作时刹车片全部抱闸, 机舱不转动; 机舱对风偏航时,所有刹车片半松开, 设置足够的阻尼,保持机舱平稳偏航; 自动解缆时,偏航刹车片全松开。 偏航润滑装置 偏航轴承润滑150cc/周 偏航齿轮润滑50cc /周 用量3:1 润滑周期16分钟/72小时(偏航润滑油泵启动间隔时间:36H 偏航润滑油泵运行时间:960s ) 偏航系统工作原理 偏航系统原理 由四个偏航电机与偏航内齿轮咬合,偏航内齿轮与塔筒固定在一起,四个偏航电机带动机舱转动。
华锐风机偏航系统滑动衬 垫更换方案 Prepared on 22 November 2020
偏航系统滑动衬垫更换步骤 工具: 侧面轴承更换工装一套(100T千斤顶,顶升轴,侧面轴承支撑架,拆卸螺栓一套),液压千斤顶,吊葫芦,钢丝绳,O型锁扣,撬棍,10"活扳,记号笔,液压站,3MXT扳头,55套筒,1"驱动方电动冲击扳手,50开口2个,55敲击扳手2个,小棘轮1套,4mm内六角,对中垫片若干。 更换步骤: 前期准备工作: 1. 将滑动衬垫用LOCTITE496黏贴在滑垫保持装置和滑动衬垫压板上,在 滑垫保持装置上涂抹LOCTITE496。 a 下表面滑动衬垫的黏贴
打磨并清理下表面滑动衬垫压板 将胶水涂 将胶水涂抹到滑动衬垫压板上,涂成米字形,将直径为110mm的滑垫装入垫板上,用手压紧滑垫左右旋转180度,以保证胶水在滑垫和垫板均匀分布。
b. 上表面滑动衬垫的黏贴 将滑垫安装槽清理干净
在滑垫安装槽内将胶水涂成“米”字形 将直径为100mm的滑动衬垫装入安装槽,用力压紧,并左右旋转,以保证胶水在滑垫和保持装置之间均匀分布。 具体更换步骤: 更换前的准备工作:
1.将机舱吊车旋臂梁支架旋转至机舱爬梯口上方,用钢丝绳和O 型锁扣将葫芦吊装上,葫芦吊挂钩应置于机舱爬梯口中心位置,固定机舱内小吊车旋臂支架。如图所示: 2.机舱偏航,使得侧面轴承正下方错开塔筒吊物口和塔筒爬梯口。 3.将靠机舱爬梯口边的三个侧面轴承的预紧力调节螺栓(M30)松开至能手动旋转状态。同时将六个侧面轴承编号,我们将靠近机舱爬梯边齿轮箱侧的侧面轴承标号为1,随后将其余侧面轴承逆时针依次编号为2-6。 用O 形环 钢丝绳与 1 6 5 4 2 3
1.5MW风力发电机组 偏航系统原理及维护 UP77/82 风电机组偏航控制及维护 目录 1、偏航系统简介 2、偏航系统工作原理 3、偏航系统控制思想 4、偏航系统故障 5、偏航系统维护 偏航系统简介 偏航系统功能 ?使机舱轴线能够跟踪变化稳定的风向; ?当机舱至塔底引出电缆到达设定的扭缆角度后自动解缆。 风向标 ?风向标的接线包括四根线,分别是两根电源线,两个信号(我们实际的) 线和两根加热线; ?目前每台机组上有两个风向标; ?风向标的N指向机尾; ?偏航取一分钟平均风向。 偏航系统结构
4个偏航电机 偏航刹车片(10 个)偏航内齿圈 塔筒偏航大齿圈侧面轴承 ?偏航轴承 ?内摩擦的滑动轴承系统; ?内齿圈设计。 偏航驱动电机: ?数量:4个 ?对称布置,由电机驱动小齿轮带动整个 机舱沿偏航轴承转动,实现机舱的偏航; ?内部有温度传感器,控制绕组温度 ?偏航电子刹车装置, ?偏航齿轮箱:行星式减速齿轮箱 ?偏航小齿轮 ?偏航编码器 ?绝对值编码器,记录偏
航位置; ?偏航轴承齿数与编码器码盘齿数之比; ?左右限位开关,常开触点; ?左右安全链限位开关,常闭触点; 偏航刹车片 运行时间:960s ) 偏航系统工作原理 偏航系统原理 ?由四个偏航电机与偏航内齿轮咬合,偏航内齿轮与塔筒固定在一起,四个偏航电机带动机舱转动。 ?偏航电机由软启动器控制。
偏航软启动器 ?软启动器使偏航电机平稳启动; ?晶闸管控制偏航电机启动电压缓 慢上升,启动过程结束时,晶闸 管截止; 1. 2. 3. 4. 5. : 10组偏 ~ 固制动;偏航时,刹车仍 然保持一定的余压 (15bar的余压),使偏 航过程中始终有阻尼存 在,保证偏航运动更加平稳,避免可能发生的振动现象;
风力发电机组偏航系统详细介绍2012-12-15 资讯频道 偏航系统的主要作用有两偏航系统是水平轴式风力发电机组必不可少的组成系统之一。 使风力发电机组的风轮始终处于迎风状态,其一是与风力发电机组的控制系统相互配合,个。以保障风力发其二是提供必要的锁紧力矩,充分利用风能,提高风力发电机组的发电效率;被动风力发电机组的偏航系统一般分为主动偏航系统和被动偏航系统。电机组的安全运行。舵轮常见的有尾舵、偏航指的是依靠风力通过相关机构完成机组风轮对风动作的偏航方式,常见的有主动偏航指的是采用电力或液压拖动来完成对风动作的偏航方式,和下风向三种;通常都采用主动偏航的齿轮驱动对于并网型风力发电机组来说,齿轮驱动和滑动两种形式。形式。 1.偏航系统的技术要求 1.1. 环境条件 在进行偏航系统的设计时,必须考虑的环境条件如下: 1). 温度; 2). 湿度; 3). 阳光辐射; 雨、冰雹、雪和冰;4). 5). 化学活性物质; 机械活动微粒;6). 盐雾。风电材料设备7). 近海环境需要考虑附加特殊条件。8). 应根据典型值或可变条件的限制,确定设计用的气候条件。选择设计值时,应考虑几 气候条件的变化应在与年轮周期相对应的正常限制范围内,种气候条件同时出现的可能性。不影响所设计的风力发电机组偏航系统的正常运行。 1.2. 电缆 必须使电缆有足够为保证机组悬垂部分电缆不至于产生过度的纽绞而使电缆断裂失效, 电缆悬垂量的多少是根据电缆所允许的扭转角度确定的悬垂量,在设计上要采用冗余设计。的。阻尼1.3. 偏航系统在机组为避免风力发电机组在偏航过程中产生过大的振动而造成整机的共振, 阻尼力矩的大小要根据机舱和风轮质量总和的惯性力矩来偏航时必须具有合适的阻尼力矩。只有在其基本的确定原则为确保风力发电机组在偏航时应动作平稳顺畅不产生振动。确定。阻尼力矩的作用下,机组的风轮才能够定位准确,充分利用风能进行发电。 1.4. 解缆和纽缆保护 偏航系统的偏航动解缆和纽缆保护是风力发电机组的偏航系统所必须具有的主要功能。 所以在偏航系统中应设置与方向有关的计数作会导致机舱和塔架之间的连接电缆发生纽绞,检测装置或类一般对于主动偏航系统来说,装置或类似的程序对电缆的纽绞程度进行检测。对于被动偏航系统检测装置或类似似的程序应在电缆达到规定的纽绞角度之前发解缆信号;偏航系并进行人工解缆。的程序应在电缆达到危险的纽绞角度之前禁止机舱继续同向旋转,一般与偏航圈统的解缆一般分为初级解缆和终极解缆。初级解缆是在一定的条件下进行的,这个装置的控制逻纽缆保护装置是风力发电机组偏航系统必须具有的装置,数和风速相关。辑应具有最高级别的权限,一旦这个装置被触发,则风力发电机组必须进行紧急停机。偏航转速 1.5. 1 对于并网型风力发电机组的运行状态来说,风轮轴和叶片轴在机组的正常运行时不可避免的产生陀螺力矩,这个力矩过大将对风力发电机组的寿命和安全造成影响。为减少这个力矩对风力发
第十一章习题 11.1 单项选择题 11.1.1 DSS涉及计算机、管理决策、数学、人工智能等多学科的理论、方法和技术,对使用者而言,以下最好的说法是(C)。 a. 计算机知识最重要 b. 数学知识最重要 c. 管理决策知识最重要 d. 很难说哪种知识最重要 11.1.2 关于使用DSS的问题有以下几种说法,其中最好的说法是(B)。 a. 无论是谁,只要有说明书,慢慢地试着用,会用好的 b. 经验丰富的经理会用的好些 c. 懂计算机的人会用的好些 d.没有计算机专业人员的引导很难用好 11.1.3 以下与DSS产生和发展最无关的是(D)。 a. 信息技术的发展 b. 管理决策理论的发展 c. 企业环境的变化 d. 白领工人的增加 11.1.4 与MIS等其他信息系统相比,以下DSS的定义中,(C)是DSS最显著的特色。 a. DSS是一种以计算机为工具的信息系统 b. DSS应用决策科学及有关学科的理论与方法 c. DSS以人机交互方式辅助决策者 d. DSS是解决半结构化和非结构化问题的信息系统 11.1.5 传统的DSS有许多功能,如A. 企业内外部信息查询;B. 决策模型构建;C. 求解算法供选;D. 决策问题分析。现在如果要你作为用户就其重要程度排队,排在最前面的是(D)。 a. A b. B c. c d. D 11.1.6 DSS是基于两种基本形式的结构分解和组合而演变起来的,这两种基本形式是(B)。 a. 数据库与模型库 b. 两库结构与基于知识的结构 c.人机对话子系统和三库结构 d. 模型库和方法库 11.1.7 MIS和DSS都有模型,但它们的模型在(A)方面是有区别的。 a. 模型的可组建性 b. 模型的大小 c.模型的多少 d. 模型的储存方式 11.1.8 DSS中的模型库和方法库是两个重要的构件,它们所存储的决策资源不同,作用也不同。模型库储存的模型和方法库储存的方法之间的区别(A)。 a. 在于对决策支持作用的“幕前”和“幕后” b. 实际上是很难识别的 c. 实际上并不大 d. 在于对决策支持作用的大小 11.1.以下关于各种信息系统的说法中正确的是(C)。 a.某企业建立了多个OAS b.某企业建立了多个CRM c. 某企业建立了多个DSS d.某企业建立了多个ERP 11.1.10 与专家系统相比,人工神经元网络具有(B)的特点。 a.解决问题的逻辑清晰 b某些应用会超过专家的水平 c. 能对结果进行合理的解释 d. 较人性化 1传统的DSS与智能DSS在构成、应用对象、性能等方面有许多区别,但其中最主要的区别是(D )。 a. 部件的多少 b. 使用方便程度 c. 计算能力的大小 d. 人机之间距离的远近 11.1.12 DSS需要良好的人机对话子系统,最主要是为了(A)。 a. 使计算机更接近人 b. 方便决策人员的使用 c. 使人更接近计算机 d. 便于维护人员维护 11.l.13 推理机是IDSS中的重要构件,也是IDSS的主要特色,在决策支持的过程中发挥(B )的作用。
1.5M风机液压系统及偏航系统分析 1.5M风机中使用的是哈威的液压系统。液压泵电机额定功率为0.25Kw,额定转速为1320转/分,三相交流690V50Hz供电。液压系统如图: 液压系统功能如下: 1、为偏航闸提供140—160bar的液压压力; 2、为叶轮锁定闸提供锁定压力; 3、在特殊情况下,可以用液压站上的手动液压泵为叶轮锁定闸提供锁定压力。系统油路分析如下: 截流手阀7.1、12.6 旋紧拧死,截流手阀11.2、6.1旋松打开。(5个的六方扳手) 正常工作状态(不偏航):电磁阀9.1、12.1、12.2的线圈均始终不得电。 正常工作状态(偏航):电磁阀12.2线圈始终得电,电磁阀9.1、12.1的线圈均始终不得电。 使用液压闸锁定叶轮时:电磁阀9.1的线圈得电。 叶轮锁定闸建压:电磁阀9.1的线圈得电阀芯动作,P口和A口连通,液压泵1.3工作建压,液压油流经导流块的P通道,进入滤芯3,经过单向阀4,进入阀组9经P口A口液压油进入叶轮闸的液压缸内,在液压压力的作用下叶轮锁定闸动作闭合。 叶轮锁定闸失压:电磁阀9.1的线圈失电,电磁阀的阀芯在弹簧力的作用下阀芯动作归位,A口和T口连通,液压油在叶轮锁定闸上的归位弹簧的作用下液压油经过A口T口流回油箱。 偏航闸建压:偏航电磁阀12.2和偏航泄压电磁阀12.1的线圈失电(不得电),阀组的P口与A口连通,液压泵工作建压,液压油流经导流块的P通道,进入
滤芯3,经过单向阀4,经过截流手阀11.2,经过单向阀12.5,经过不可调节流孔12.3,流过阀组的P口与A口进入,液压油进入偏航闸的油缸内。 偏航闸泄压松闸:偏航电磁阀12.2的线圈得电阀芯动作,使A口与T口连通A口与P口关闭,液压油由偏航油缸回流入A口,经过溢流阀12.4和管路,进入连接块的R口,回流入油箱。 各个部分的简介: 贮压罐7 偏航电磁阀12.2 压力表6 偏航余压溢流阀12.4 偏航卸压电磁阀12.1 (偏航清洁/零压力电 磁阀) 偏航油管B 加油口1.5 偏航油管A 叶轮锁定闸油管 叶轮锁定闸电磁阀9.1 压力继电器10 滤芯堵塞发讯器3.1 截流手阀11.2 系统溢流阀5 截流手阀7.1 截流手阀6.1
题目:风力发电机偏航系统控制 风力发电机偏航系统控制 摘要 本文介绍了风力机的偏航控制机构、驱动机构的基础上,采用PLC作为主控单元,设计了风电机组的偏航控制系统。系统根据风向、风速传感器采集的数据,采取逻辑控制主动对风,实现了对风过程可控。论文给出了基于风向标、风速仪的偏航控制系统的软硬件设计结果。 关键词:
Wind turbine yaw control system Abstract In this paper, the wind turbine yaw control mechanism, drive mechanism, based on the use of single-chip PLC as the main control unit, designed for wind turbine yaw control system. Systems based on wind direction, wind speed data collected by sensors, logic control to take the initiative on the wind, to achieve controllability of the wind process. Papers are given based on the wind direction, wind speed sensor yaw control system hardware and software design. Key words:Wind turbine ;Yaw control system;
1.5MW风力发电机 组 偏航系统原理及维护
UP77/82 风电机组偏航控制及维护 目录 1、偏航系统简介 2、偏航系统工作原理 3、偏航系统控制思想 4、偏航系统故障 5、偏航系统维护 偏航系统简介 偏航系统功能 ?使机舱轴线能够跟踪变化稳定的风向; ?当机舱至塔底引出电缆到达设定的扭缆角度后自动解缆。风向标 ?风向标的接线包括四根线,分别是两根电源 线,两个信号(我们实际的) 线和两根加热线; ?目前每台机组上有两个风向标; ?风向标的N指向机尾; ?偏航取一分钟平均风向。 偏航系统结构 4个偏航电机
偏航刹车片(10 个)偏航内齿圈 塔筒偏航大齿圈侧面轴承 ?偏航轴承 ?内摩擦的滑动轴承系统; ?内齿圈设计。 偏航驱动电机: ?数量:4个 ?对称布置,由电机驱动小齿轮带动整个 机舱沿偏航轴承转动,实现机舱的偏航; ?内部有温度传感器,控制绕组温度 ?偏航电子刹车装置, ?偏航齿轮箱:行星式减速齿轮箱 ?偏航小齿轮 ?偏航编码器 ?绝对值编码器,记录偏
航位置; ?偏航轴承齿数与编码器碼盘齿数之比; ?左右限位开关,常开触点; ?左右安全链限位开关,常闭触点; 偏航刹车片 ?数量:10个 ?液压系统偏航刹车控制; ?偏航系统未工作时刹车片全部抱闸, 机舱不转动; ?机舱对风偏航时,所有刹车片半松开, 设置足够的阻尼,保持机舱平稳偏航; ?自动解缆时,偏航刹车片全松开。 偏航润滑装置 ?偏航轴承润滑150cc/周 ?偏航齿轮润滑50cc /周 ?用量3:1 ?润滑周期16分钟/72小时(偏航润滑油泵启动间隔时间:36H 偏航润滑油泵运行时间:960s ) 偏航系统工作原理 偏航系统原理 ?由四个偏航电机与偏航内齿轮咬合,偏航内齿轮与塔筒固定在一起,四个偏航电机带动机舱转动。
第11章管理知识 单项选择题(一) 1.知识管理价值链的最后一个步骤是什么? A)反馈 B)采集 C)传播 D)存储 E)应用 Answer: E Difficulty: Moderate 2.当前,大约有_______%的美国国内生产总值(GDP)是由知识和信息部门创 造。 A)15 B)25 C)55 D)65 E) 85 Answer: C Difficulty: Challenging 3.下列哪个选项最准确地描述了协作和知识管理之间的关系? A)没有知识就难以协作 B)没有协作就不存在知识 C)只有和别人分享,知识才是有用的 D)随着知识的增加,协作也增强了 E)知识是协作的结果 Answer: C Difficulty: Moderate 4.被组织系统获取的一系列事件或交易描述的文本是 ________: A)信息 B)数据 C)智慧 D)知识 E)经验 Answer: B Difficulty: Easy 5.没有被组织成员文件记录的文本是________: A)智慧
B)信息 C)数据 D)经验 E)隐性知识 Answer: E Difficulty: Moderate 6.下列描述中哪个不是对公司中知识重要性的正确描述? A)知识网络被更多的人分享才有效 B)知识应该被视为无形的关键资产 C)知识使的企业在应用稀缺资源时更加有效率 D)知识的应用是没有前提条件的 E)公司价值依赖于创造知识的; Answer: D Difficulty: Challenging 7.“知识具有粘性”这句话的含义是什么? A)知识难以转移 B)知识具有普遍适用性 C)知识基于特定情境 D)知识是无形的 E)知识难易替换 Answer: A Difficulty: Challenging 8.下列哪个不属于本章所述的四个知识的重要特征? A)知识是一种公司资产 B)知识有不同的形式 C)知识有位置 D)知识与情景相关 E)知识是没有时间性的 Answer: E Difficulty: Challenging 9.通过感知和响应新的经验和知识来改变组织的行为被称为________: A)变革管理 B)知识杠杆 C)知识价值链 D)机器学习 E)知识管理 Answer: D Difficulty: Moderate 10.在知识价值链中,第一个增值步骤是什么?
1.5MW风力发电机组 变桨系统原理及维护 国电联合动力技术有限公司 培训中心 (内部资料严禁外泄) UP77/82 风电机组变桨控制及维护
目录 1、变桨系统控制原理 2、变桨系统简介 3、变桨系统故障及处理 4、LUST与SSB变桨系统的异同 5、变桨系统维护 定桨失速风机与变桨变速风机之比较 定桨失速型风电机组 发电量随着风速的提高而增长,在额定风速下达到满发,但风速若再增加,机组出力反而下降很快,叶片呈现失速特性。 优点:机械结构简单,易于制造; 控制原理简单,运行可靠性高。 缺点:额定风速高,风轮转换效率低; 电能质量差,对电网影响大; 叶片复杂,重量大,不适合制造大风机 变桨变速型风电机组 风机的每个叶片可跟随风速变化独立同步的变化桨距角,控制机组在任
何转速下始终工作在最佳状态,额定风速得以有效降低,提高了低风速下机组的发电能力;当风速继续提高时,功率曲线能够维持恒定,有效地提高了风轮的转换效率。 优点:发电效率高,超出定桨机组10%以上; 电能质量提高,电网兼容性好; 高风速时停机并顺桨,降低载荷,保护机组安全; 叶片相对简单,重量轻,利于制造大型兆瓦级风机 缺点:变桨机械、电气和控制系统复杂,运行维护难度大。 变桨距双馈变速恒频风力发电机组成为当前国内兆瓦级风力发电机组的主流。 变桨系统组成部 分简介 变桨控制系统简介
?主控制柜 ?轴柜 ?蓄电池柜 ?驱动电机 ?减速齿轮箱 ?变桨轴承 ?限位开关 ?编码器 ?变桨主控柜 ?变桨
轴柜 ?蓄电池柜
?电机编码器 GM 400绝对值编码器共10根线,引入变桨控制柜,需按线号及颜色接入变桨控制柜端子排上。 ?限位开关
偏航系统滑动衬垫更换步骤工具: 千斤顶,顶升轴,侧面轴承支撑架,拆卸螺侧面轴承更换工装一套(100T活扳,记号型锁扣,撬棍,?栓一套),液压千斤顶,1.5t吊葫芦,钢丝绳,O55个,驱动方电动冲击扳手,50开口2套筒,笔,液压站,3MXT扳头,55就内六角,对中垫片若干。1套,4mm敲击扳手2个,小棘轮 更换步骤:前期准备工作:在将滑动衬垫用LOCTITE496黏贴在滑垫保持 装置和滑动衬垫压板上,1. LOCTITE496。滑垫保持装置上涂抹 下表面滑动衬垫的黏贴a 打磨并清理下表面滑动衬垫压板
将胶水涂成米字形 的滑垫装入将胶水涂抹到滑动衬垫压板上,涂成米字形,将直径为110mm 度,以保证胶水在滑垫和垫板均匀分布。垫板上,用手压紧滑垫左右旋转180 上表面滑动衬垫的黏贴b. 将滑垫安装槽清理干净
在滑垫安装槽内将胶水涂成“米”字形 的滑动衬垫装入安装槽,用力压紧,并左右旋转,以保证100mm将直径为胶水在滑垫和保持装置之间均匀分布。具体更换步骤: 更换前的准备工作:型锁扣将1.将机舱吊车旋臂梁支架旋转至机舱爬梯口上方,用钢丝绳和O固定机舱内小吊车旋臂支葫芦吊装上,葫芦吊挂钩应置于机舱爬梯口中心位置,架。如图所示: 形环定钢丝钢丝绳与葫芦相连
.机舱偏航,使得侧面轴承正下方错开塔筒吊物口和塔筒爬梯口。2)松开至能M303.将靠机舱爬梯口边的三个侧面轴承的预紧力调节螺栓(我们将靠近机舱爬梯边齿轮箱侧的侧手动旋转状态。同时将六个侧面轴承编号,2-6。面轴承标号为1,随后将其余侧面轴承逆时针依次编号为 3 4 5 2 1 6 .将侧面轴承调整工装的圆钢穿于两侧偏航电机下部的主机架圆孔中,将4详情如千斤顶应放置在靠近齿轮箱侧的偏航电机附近。千斤顶放于偏航齿圈上,下图所示:
第十一章决策支持系统 第十一章习题 11.1 单项选择题 11.1.1 DSS涉及计算机、管理决策、数学、人工智能等多学科的理论、方法和技术,对使用者而言,以下最好的说法是( C )。 a. 计算机知识最重要 b. 数学知识最重要 c. 管理决策知识最重要 d. 很难说哪种知识最重要 11.1.2 关于使用DSS的问题有以下几种说法,其中最好的说法是( B )。 a. 无论是谁,只要有说明书,慢慢地试着用,会用好的 b. 经验丰富的经理会用的好些 c. 懂计算机的人会用的好些 d.没有计算机专业人员的引导很难用好 11.1.3 以下与DSS产生和发展最无关的是( D )。 a. 信息技术的发展 b. 管理决策理论的发展 c. 企业环境的变化 d. 白领工人的增加 11.1.4 与MIS等其他信息系统相比,以下DSS的定义中,( C )是DSS最显著的特色。 a. DSS是一种以计算机为工具的信息系统 b. DSS应用决策科学及有关学科的理论与方法 c. DSS以人机交互方式辅助决策者 d. DSS是解决半结构化和非结构化问题的信息系统 11.1.5 传统的DSS有许多功能,如A. 企业内外部信息查询;B. 决策模型构建;C. 求解算法供选;D. 决策问题分析。现在如果要你作为用户就其重要程度排队,排在最前面的是( D )。 a. A b. B c. c d. D 11.1.6 DSS是基于两种基本形式的结构分解和组合而演变起来的,这两种基本形式是( B )。 a. 数据库与模型库 b. 两库结构与基于知识的结构 c.人机对话子系统和三库结构 d. 模型库和方法库 11.1.7 MIS和DSS都有模型,但它们的模型在( A )方面是有区别的。 a. 模型的可组建性 b. 模型的大小 c.模型的多少 d. 模型的储存方式 11.1.8 DSS中的模型库和方法库是两个重要的构件,它们所存储的决策资源不同,作用也不同。模型库储存的模型和方法库储存的方法之间的区别( A )。 a. 在于对决策支持作用的“幕前”和“幕后” b. 实际上是很难识别的 c. 实际上并不大 d. 在于对决策支持作用的大小 11.1.9 以下关于各种信息系统的说法中正确的是( C )。 a. 某企业建立了多个OAS b. 某企业建立了多个CRM c. 某企业建立了多个DSS d. 某企业建立了多个ERP 11.1.10 与专家系统相比,人工神经元网络具有( B )的特点。 a. 解决问题的逻辑清晰 b. 某些应用会超过专家的水平 c. 能对结果进行合理的解释 d. 较人性化 11.1.11 传统的DSS与智能DSS在构成、应用对象、性能等方面有许多区别,但其中最主要的区别是( D )。
1.5MW风机学习资料 一、偏航系统 偏航系统主要有两个功能,一是使机舱轴线跟踪变化稳定的风向,二是当机舱至塔底引出电缆到达设定的扭缆角度后自动进行解缆,结构图如下所示: 结构原理介绍: 偏航系统是由偏航轴承和四台偏航电机驱动的齿轮传动机构组成的。偏航轴承为内摩擦的滑动轴承系统,为内齿圈设计。四台偏航驱动对称布臵,由电机驱动小齿轮带动整个机舱沿偏航轴承转动,实现机舱的偏航。 当风向与机舱轴线偏离一个角度时(风小时为±8°,风大时为±15°),控制系统经过一段时间的确认后,会控制偏航电机将机舱轴线调整到与风向一致的方位,实现机舱对风。 运行状态介绍: 当偏航电机带动偏航轴承偏航时,偏航液压刹车系统处于半释放状态,从而设臵足够大的阻尼,偏航时使机舱保持足够的稳定性。当偏航电机停止时,偏航液压系统处于刹车状态,将机舱固定到相应的位臵上。 当机舱偏航到某一角度,由机舱引入到塔底的发电机电缆将处于缠绕的状态,这时风力发电机组会进行解缆处理(偏航系统按缠绕的反方向偏航),使电缆解除缠绕的状态。由于解缆时希望能够快速偏航,这时偏航液压系统刹车处于完全释放状态。
控制原理: 在不同的风速条件下,偏航的动作方式不同,分为高风速偏航和低风速偏航。高风速下自动偏航:60秒平均风速大于等于9 m/s,触发偏航程序的条件如下:? 偏航对风60秒平均偏差大于8°,延时210s,风机偏航。 ? 偏航对风60秒平均偏差大于15°,延时20s,风机偏航。 低风速下自动偏航:60秒平均风速小于9 m/s,触发偏航程序的条件如下:? 偏航对风60秒平均偏差大于10°,延时250s,风机偏航。 ? 偏航对风60秒平均偏差大于18°,延时25s,风机偏航。 禁止偏航的条件: 在下列情况下,不允许自动偏航: ? 产生偏航故障; ? 偏航解缆动作; ? 风机处于维护模式; ? 30s平均风速<2.5m/s; ? 紧急停机过程; ? 发生风向故障; ? 发生液压故障; 自动偏航不影响风机的当前状态。 自动解缆的条件: 1)风机处于待机状态和非维护模式,同时不出现偏航和液压故障 2)判断当位臵大于580或小于-580时,向右或向左解缆动作 解缆停止条件: 情况1:偏航位臵回到小于360度,对风角度(风向标数值与180度差值) 小于30度; 情况2:偏航位臵小于40度 偏航解缆后,风机处于待机状态。
一、单选题 1.下列哪项不是一般信息的特点( ) A.可识别性 B.不可储存性 C.可传递性D.可替代性 2.“护理信息储存于计算机中,各级护理人员可以通过医院的计算机网络方便地共享信息资源"表明了理护理信息的( ) A.可识别性 B.不可储存性 C.可传递性 D.可替代性 3.“信息是一种可创造价值的知识,它的价值不但可以替代资本、劳动力、物资,而且比它们更重要"表明了理护理信息的( ) A.可识别性 B.不可储存性 C.可传递性 D.可替代性 4.下列哪项不是护理信息的特点( ) A.相关性 B.生物医学属性 C.准确性 D.非连续性 5.护理论文检索和护理诊断查询主要用下列哪种方式获得信息( ) A.口头方式 B.文书传递 C.简单的计算工具 D.计算机处理 6.护理信息较常用的传递方式是( ) A.口头方式 B.文书传递 C.简单的计算工具 D。计算机处理 7.下列哪项不是口头方式传递信息的特点( ) A.错误的责任有时难以追查 B.简单易行 C.晨交班用 D.不容易发生错误 8.利用计算机处理信息不包括( ) A.无逻辑判断能力 B.有大容量记忆功能 C.计算精确度高 D.是一种先进的信息管理方式 9.目前应用计算机管理系统在护理管理中不包括( ) A.住院病人医嘱处理系统 B.住院病人信息管理系统 C.住院病人药物管理系统 D.社区卫生服务处理系统 10.护理信息系统的描述,下列哪项不正确( ) A.收集信息 B.整理信息 C.处理信息 D.储存信息 11.护理信息最常用的传递方式是( ) A.人工处理 B.口头方式 C.文书方式 D.计算机处理 12.下列哪项不是口头传递信息方式的特点( ) A.速度较快 B.容易发生错误 C.错误的责任有时难以追查 D.较可靠 13.文书传递信息的优点不包括下列哪项( ) A.保留时间长 B.有据可查 C.容易发生错误 D.传递速度较慢 14.抢救病人时常用的信息传递方式是( ) A.人工处理 B.口头方式
新疆大学大作业 题目:偏航系统的原理 学号: 学生姓名: 所属院系:电气工程学院 专业:电气工程及其自动化班级: 指导老师: 完成日期:20年月日
偏航系统的功能和原理 摘要 能源、环境是当今人类生存和发展所要解决的紧迫问题。风力发电作为一种可持续发展的新能源,不仅可以节约常规能源,而且减少环境污染,具有较好的经济效益和社会效益,越来越受到各国的重视。 由于风能具有能量密度低、随机性和不稳定性等特点,风力发电机组是复杂多变量非线性不确定系统,因此,控制技术是机组安全高效运行的关键。偏航控制系统成为水平轴风力发电机组控制系统的重要组成部分。风力发电机组的偏航控制系统,主要分为两大类:被动迎风偏航系统和主动迎风系统。前者多用于小型的独立风力发电系统,由尾舵控制,风向改变时,被动对风。后者则多用大型并网型风力发电系统,由位于下风向的风向标发出的信号进行主动对风控制。本文设计是大型风力发电机组根据风速仪、风向标等传感器数据,对风、制动、开闸并确定起动,达到同步转速一段时间后,进行并网操作,开始发电。 偏航系统的功能和原理 偏航系统是风力发电机组特有的伺服系统,是风力发电机组电控系统必不可少的重要组成部分。它的功能有两个:一是要控制风轮跟踪变化稳定的风向;二是当风力发电机组由于偏航作用,机舱内引出的电缆发生缠绕时,自动解除缠绕。风力机偏航的原理是通过风传感器检测风向、风速,并将检测到的风向信号送到微处理器,微处理器计算出风向信号与机舱位置的夹角,从而确定是否需要调整机舱方向以及朝哪个方向调整能尽快对准风向。当需要调整方向时,微处理器发出一定的信号给偏航驱动机构,以调整机舱的方向,达到对准风向的目的。 1.1 偏航控制系统的功能 偏航控制系统主要具备以下几个功能: (1)风向标控制的自动偏航;
浅析风机偏航系统 newmaker 随着风能公司不断的向前发展,达坂城风电场的扩建也进行到了第三期。其中包括BOUNS150KW、TACKE600KW、AN BONUS450KW、JACOBS500KW、国产化600KW等五种不同型号的风机。各类风机的偏航系统也都有一些不同地方和特点,现就对偏航系统作些探讨。 一.偏航的构成及原理: 偏航系统主要由偏航测量及偏航驱动部分,机械传动部分,扭缆保护装置三大部分组成,其各部分组成及工作原理如下: (一)、偏航测量及偏航驱动部分: 偏航测量及偏航驱动主要由风向标、偏航识别和偏航执行机构组成。 1.测量: 风机对风的测量主要是由风向标来完成。随着数字电路的发展,风向标的种类也有许多。风向标是一种光电感应传感器。有一种内部带有一个8位的格雷码盘,当风向标随风转动时,同时也带动格雷码盘转动,由此得到不同的格雷码盘,通过光电感应元件,变成一组8位数字信号传入单板机。格雷码盘将360°分成256个区,每个区为1.41°,固其测量精度为1.41°.另一种风向标在转动时,将同时带动两个传感器一起转动,风向标正向是一号传感器,为0°轴,二号传感器同一号传感器成90°夹角,为90°轴,这样就将形成一个虚拟的坐标,坐标里有4个象限,当风向标转动后,就会同风机现在的方向形成夹角,而风机现在的方向必定会落在风向标所带的坐标象限内,这样一来就会使风机偏航,偏航动作见表
2.偏航识别和执行机构 当风向标的信号被采集后,通过数据传输到工业单板机.工业单板机通过程序计算后进行判断,是否应偏航?当确定须偏航后,计算机发出偏航动作信号.信号经放大后先驱动顺偏或逆偏继电器,再由继电器驱动接触器吸合,使偏航电机带电运行来完成顺时针或逆时针转动对风.偏航正、反向驱动电路是互为闭锁回路。 (二)机械传动部分 传动部分主要由偏航电机、偏航减速机构、偏航小齿轮、偏航齿圈、偏航刹车组成。 1.偏航电机 各类风机都采胩三相异步电动机,额定功率BONUS150KW风机为0.55KW,TACKE 600KW 风机为2.2KW,AN BONUS450KW风机为0.55KW(双电机),JACOBS500KW风机为0.55KW(双电机),国产化600KW风机为0.55KW(双电机),都带有电磁闸.双电机可增加齿面的接触面积,增大啮合强度,转动更平稳. 2.偏航减速机构 减速器一般都由二通讯组成.第一级都是螺旋齿轮减速器,第二级为行里齿轮减速器.TACKE 风机为使偏航转动平稳,还单独安装了一个减速器. 3.偏航小齿轮和偏航齿盘 小齿轮由偏航电机经减速器减速后驱动,带动机舱在偏航齿盘上转动,偏航齿盘固定在塔架上是不动的,这样就可使机舱能正确对风叶轮能转动对风.
偏航系统原理及技术特点的分析 一.偏航的构成及原理: 偏航系统主要由偏航测量及偏航驱动部分,机械传动部分,扭缆保护装置三大部分组成,其各部分组成及工作原理如下: (一)、偏航测量及偏航驱动部分: 偏航测量及偏航驱动主要由风向标、偏航识别和偏航执行机构组成。 1.测量: 风机对风的测量主要是由风向标来完成。随着数字电路的发展,风向标的种类也有许多。风向标是一种光电感应传感器。有一种内部带有一个8位的格雷码盘,当风向标随风转动时,同时也带动格雷码盘转动,由此得到不同的格雷码盘,通过光电感应元件,变成一组8位数字信号传入单板机。格雷码盘将360°分成256个区,每个区为1.41°,固其测量精度为1.41°.另一种风向标在转动时,将同时带动两个传感器一起转动,风向标正向是一号传感器,为0°轴,二号传感器同一号传感器成90°夹角,为90°轴,这样就将形成一个虚拟的坐标,坐标里有4个象限,当风向标转动后,就会同风机现在的方向形成夹角,而风机现在的方向必定会落在风向标所带的坐标象限内,这样一来就会使风机偏航,偏航动作见表 2.偏航识别和执行机构 当风向标的信号被采集后,通过数据传输到工业单板机.工业单板机通过程序计算后进行判断,是否应偏航?当确定须偏航后,计算机发出偏航动作信号.信号经放大后先驱动顺偏或逆偏继电器,再由继电器驱动接触器吸合,使偏航电机带电运行来完成顺时针或逆时针转动对风.偏航正、反向驱动电路是互为闭锁回路。
(二)机械传动部分 传动部分主要由偏航电机、偏航减速机构、偏航小齿轮、偏航齿圈、偏航刹车组成。 1.偏航电机 各类风机都采胩三相异步电动机,额定功率BONUS150KW风机为0.55KW,TACKE600KW风机为2.2KW,ANBONUS450KW风机为0.55KW(双电机), JACOBS500KW风机为0.55KW(双电机),国产化600KW风机为0.55KW(双电机),都带有电磁闸.双电机可增加齿面的接触面积,增大啮合强度,转动更平稳. 2.偏航减速机构 减速器一般都由二通讯组成.第一级都是螺旋齿轮减速器,第二级为行里齿轮减速器.TACKE风机为使偏航转动平稳,还单独安装了一个减速器. 3.偏航小齿轮和偏航齿盘 小齿轮由偏航电机经减速器减速后驱动,带动机舱在偏航齿盘上转动,偏航齿盘固定在塔架上是不动的,这样就可使机舱能正确对风叶轮能转动对风. 4.偏航刹车及减振 除了150KW风机只有电磁闸以外,其它的风机还都带有液压刹车.在液压刹车里,TACKE600KW、JACOBS500KW及国产化600KW风机采用盘式刹车, ANBONUS450KW风机采用撑杆式刹车。并且JACBOS500KW和国产化600KW风机在偏航时,液压刹车不带有一定的余压,使转动平稳,减小叶轮因偏航引起的振动,保护偏航轴承,150KW风机还装有五个滑爪,滑爪由上滑靴构成,上滑靴为一个尼龙块,下滑靴中有一长方形的槽,槽内有二组碟簧上放一个长方形的铜块,偏航齿盘夹在上、下滑靴之间,通过螺栓可以调节偏航盘与滑靴之间的间隙,依靠滑块与偏航盘之间的磨擦力减小由偏航引起的振动。 (三)扭缆保护装置 扭缆保护一般由凸轮控制器(或偏航位置传感器)和扭缆开关组成 凸轮控制器由小齿轮与偏航盘相啮合,在偏航动作的同时也会带动凸轮控制器内部的齿轮转动,当转动一定圈后会触动机械开关动作。计算机接收到后就进行判断,是否需要解缆。一般凸轮控制器有三个开关顺偏位置开关、中间位置开关、逆偏位置开关。 TACKE600KW风机是靠偏航位置传感器来进行扭缆测量的。这个装置由两个距半个齿间隔的记数传感器组成,当偏航动作后,由这两个记数据传感器记录偏航齿圈上的齿数,由计算机进行数据运算来识别偏航的圈数,转过3圈后,进行无条件解缆。电缆转
《管理信息系统》第13版 (Laudon/Laudon) 第11章管理知识 单项选择题 1)企业内容管理系统用于管理结构化信息,其他系统例如KWS(知识工作系统)用于管理半结构化信息和非结构化信息。 参考答案: FALSE 难度系数: 1 2)保存在员工头脑中而没有记录在文件中的知识被称作显性知识。 参考答案: FALSE 难度系数: 2 3)知识可以存储在电子邮件、语音邮件、图像、非结构化文件以及结构化文件中。 参考答案: TRUE 难度系数: 1 4)知识具有普遍适用性,可被轻易转移。 参考答案: FALSE 难度系数: 1 5)CAD是一种智能技术。 参考答案: FALSE 难度系数: 1 6)知识工作者包括从高层次的科学家到文本和数据处理者,他们的主要工作任务是为组织管理和创造知识。 参考答案: FALSE 难度系数: 1 7)结构化知识是一种存在于非正式文件中的显性知识。 参考答案: FALSE 难度系数: 1 8)半结构化知识是存储在公司的有经验员工头脑中的所有知识。 参考答案: FALSE 难度系数: 2 9)虚拟现实建模语言(VRML)要求使用强大的服务器以及大流量的带宽网络。参考答案: FALSE
难度系数: 2 10)专家系统是用于知识挖掘的基本工具。 参考答案: FALSE 难度系数: 1 11)专家系统捕获熟练员工的知识,将其转化为软件系统中一系列规则,供组织使用。 参考答案: TRUE 难度系数: 1 12)专家系统被广泛应用于企业中一些离散的、高结构化的决策中。 参考答案: TRUE 难度系数: 2 13)专家系统是一些与/或规则的应用,与特定的知识库相对,两者都是获取自人类专家。 参考答案: FALSE 难度系数: 2 14)基于案例推理不适用于医学上的诊断系统。 参考答案: FALSE 难度系数: 1 15)模糊逻辑系统可以用语言描述一个特殊的现象或过程,然后用少量的灵活规则来表达。 参考答案: TRUE 难度系数: 2 16)模糊逻辑系统通过筛虑数据,寻找关系,建立模型,以及不断进行模型校正得的方法,从大量数据中“学习”模式。 参考答案: FALSE 难度系数: 2 17)由于神经网络不能解释得到特定解决方案的原因,因此并不适用于医学领域。参考答案: FALSE 难度系数: 2 18)3D打印如今被用于制造小物件,例如髋关节假肢。 参考答案: TRUE 难度系数: 2 19)智能代理能够在大量数据集中挖掘出潜在模式,分类和行为。