基于BP网的异步电机故障诊断方法
- 格式:pdf
- 大小:164.44 KB
- 文档页数:4
基于BP网络的电机故障诊断摘要:介绍了BP神经网络以及电机故障诊断的发展和电动机故障诊断常见的技术方法,列举了电机故障征兆集。
设计一个具有电机故障诊断功能的BP网络系统,给出了matlab关键程序和运行结果。
关键词:BP神经网络电机故障诊断0 引言电机的正常工作对保证生产制造过程的正常进行意义非常重大。
因此对电机故障的诊断要求十分迫切,通过对电机常见故障的诊断和分析,可以及早发现故障和预防故障的进一步恶化。
随着芯片技术的发展及智能技术的应用,诊断技术已经进入了一个新的阶段,一种基于人工智能技术的诊断方法。
该文用BP神经网络综合实现电机故障的诊断。
1 BP神经网络人工神经网络就是模拟人思维的第二种方式。
这是一个非线性动力学系统,其特色在于信息的分布式存储和并行协同处理。
虽然单个神经元的结构极其简单,功能有限,但大量神经元构成的网络系统所能实现的行为却是极其丰富多彩的。
BP(Back Propagation)网络是一种按误差逆传播算法训练的多层前馈网络,是目前应用最广泛的神经网络模型之一。
BP神经网络模型拓扑结构包括输入层(input)、隐层(hide layer)和输出层(output layer)。
BP网络能学习和存贮大量的输入-输出模式映射关系,而无需事前揭示描述这种映射关系的数学方程。
BP算法理论具有依据可靠、推导过程严谨、精度较高、通用性较好等优点,但标准BP算法存在以下缺点:收敛速度缓慢,容易陷入局部极小值,难以确定隐层数和隐层节点个数。
在实际应用中,BP算法很难胜任,因此出现了很多改进算法:①利用动量法改进BP算法;②自适应调整学习速率;③动量-自适应学习速率调整算法;④L-M学习规则。
2 电机故障诊断由于人为的因素,仅依靠日常的“ 听、摸、看” 难免会造成一定的判断失误,一方面造成电机抱轴等严重事故的发生,另一方面又可能对状态较好的电机进行停车检修,如此不仅不能保证装置的平稳运行,同时还造成了检修费用的大量浪费。
基于BP神经网络数控机床主轴电气故障诊断摘要:电气控制系统是保证数控机床正常运行的重要组成部分,如果发生故障,会导致数控机床出现各种异常问题,导致企业难以在规定的时间内完成生产目标,企业最终获得的经济收入将不断下降。
因此,必须高度重视电气控制系统的故障诊断和维护。
关键词:BP神经网络;数控机床;电气故障诊断引言随着我国智能制造不断发展,数控机床作为制造的最终端,在生产加工中的作用日益增强。
数控机床机械结构复杂,控制精度极高,若其发生故障,不仅会威胁生产人员的生命安全,还会对加工零件和机床本身造成损坏。
因此,研发人员在设计产品时有以下两方面的目标:首先,要保证数控机床安全稳定运行,尽量降低设备的故障率;其次,有在故障发生后快速判断故障类型的智能方法。
实现智能检测是企业亟需实现一项重大功能,同时也是实现智能制造的重要途径。
当前,常见的智能诊断方法有以下几种:模糊控制、专家系统、人工神经网络、基于向量机、故障树分析法、小波分析、粗集理论等,本文主要使用BP神经网络进行故障诊断。
1电气控制系统故障原因通常,系统发生地环故障状态大致分为以下几项。
(1)黑社会性质组织的应用现状。
当系统没有发出相应的命令时,坐标轴应始终保持不动。
坐标轴位置环发生故障后,在没有收到相应指令的情况下,将会有自运行等状态类别。
这种现象的主要原因是速度和位置环连接不正确,出现异常的连接断路状态同样是故障的原因之一。
(2)系统坐标搜索功能处于异常状态,难以合理实现零点搜索操作。
这种故障状态主要是由复位开关和栅零点标记造成的,如果零点被证明不符合零方向,这将在系统中产生这种故障状态。
(3)位置环故障警报。
出现这种问题的主要原因是对测量组件的损坏,如果系统中的组件损坏,将导致信号失衡,并使第一时间内的连接工作更加困难。
(4)系统出现零件状态,导致产品质量上浮频率较明显,此类问题的发生通常是由机械传动系统和导轨润滑不良造成的。
2BP神经网络人工神经网络简称神经网络,它是一种通过模仿动物神经网络行为从而建立分布式信息并行运算的数学模型。
基于神经网络的电机转子断条故障诊断1 前言电机是工农业生产中的主要传动机械。
随着现代科学技术的进步和生产的发展,电机的容量不断增大,所组成的系统的规模越来越大,构成也越来越复杂。
但由于工作环境复杂,或者电机频繁起动等原因,电机转子断条等故障时有发生,对其可靠性要求也越来越高。
传统的电机故障诊断方法,需要建立精确的数学模型、有效的状态估计或参数估计、适当的统计决策方法等。
这些前提条件使得传统的电机故障诊断具有相当的局限性。
针对传统检测方法的以上缺陷,有必要对电机转子工作情况进行更先进及时监测,以防造成重大损失。
异步电动机故障检测是通过应用先进的技术手段,在线监测异步电动机相关运行参数(如电压、电流、磁通、转速、温度、振动、局部放电等),判断其是否处于正常状态,以确定合理检修方案,从而达到避免事故停机、提高设备运行可靠性、降低维修费用的目的。
2 电机转子断条故障转子断条故障是指异步电动机转子导条断裂(端环开裂)故障。
异步电动机在运行过程中,转子导条受到径向点磁力、旋转点磁力、离心力、热弯曲挠度力等交变应力的作用,加之转子制造缺陷,导致断条故障。
在冷却效果较差时,起动电流产生的热应力和机械应力较大。
当在重载和频繁起动情况下,笼条与端环焊接处是经常发生断裂的部位。
一般过程如下:(1)在即将断裂的部位经常出现过热,很高的热应力或机械应力。
(2)达到疲劳极限时笼条断裂,并产生电弧。
(3)在继续起动时,相邻的笼条通过更大的电流,并承受更大的机械和热应力。
(4)造成更多笼条断裂,故障范围扩大;产生较大的单边磁拉力,使电机产生振动、噪声;定子电流摆动和温升增加,转速波动。
3 神经网络技术在电机转子断条故障诊断的应用人工神经元的信息处理分三个部分,首先完成输入信号与神经元联接强度内运算,然后再将其结果通过激活函数(如Sigmond函数),再经过阀值函数判决,如果输出值大于阀值,则该神经元被激活否则处于抑制状态。
神经元按一定模式连接成网络型,神经元之间的连接权值的大小反应信号传递的强弱。
基于模糊神经网络的电动机的故障诊断【摘要】本文以异步电动机为研究对象,提出了一种基于模糊神经网络的故障诊断方法,并进行了验证。
将模糊逻辑引进神经网络,先对输入数据进行模糊预处理,然后将模糊化后的数据导入神经网络中,最后得出的结果满足实际需求,从而证明了模糊神经网络在异步电动机的故障诊断中可行性。
【关键词】模糊神经网络;异步电动机;故障诊断1.引言异步电动机作为人们日常生活和工业生产的主要驱动装置和动力装置,具有广泛的应用范围已成为人们生活生产中不可或缺的重要装置。
据资料显示,90%的工业生产原动力是大型异步电动机。
各种小型的电动机也广泛的应用于人们的日常生活中比如一些风扇、冰箱等家电。
显而易见,电动机的正常工作对保证工业生产和日常生活的低耗、优质、高效和安全运行意义重大。
由此看出,电机一旦发生故障甚至停机,必将带给个人生活和企业的生产带来不便和损失。
因此,对于电机故障的准确和及时地诊断并加以排除具有较大的意义。
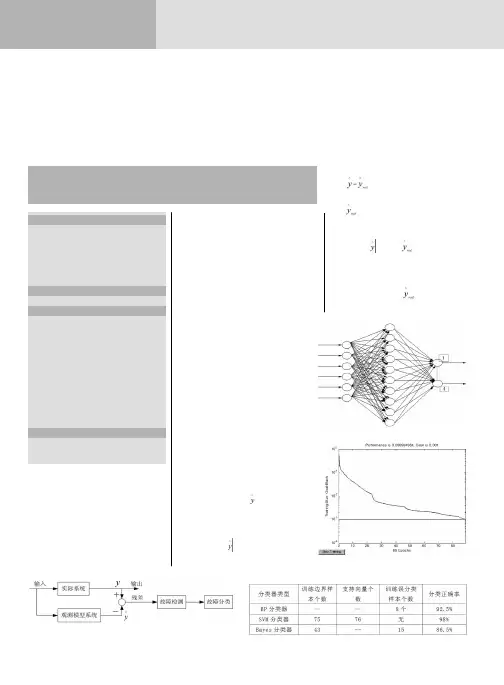
2.异步电动机常见故障及诊断方法异步电动机常见故障按照发生位置不同主要分为定子绕组故障、转子绕组故障、轴承故障等几类。
根据多年经验研究以及对电动机故障的分析,其故障发生概率分别为30%、10%、15%。
根据异步电动机的结构特点可知,其系统主要分为机械系统和电气系统,机械系统故障包括偏心故障及轴承故障,而电气系统故障包括定子绕组和转子绕组故障。
根据异步电动机的常见故障发生概率以及针对性,故本文主要是对定子匝间短路、转子断条、转子偏心故障、轴承内圈故障进行诊断分析研究。
目前,用于电机故障诊断的常用技术包括:定子电流检测法、振动检测法、温度检测法等传统的故障诊断方法一般是在实际测量的参数基础上,用数学的(FFT)、信号处理(小波分析)等方法对测量参数进行故障特征参数的提取,对故障特征参数进行分析来确定其故障。
测量的参数主要包括定子电流、电机温度、振动、噪声等信号。
以上方法各有自己的优点和特点,一般根据实际情况和研究对象来选择合适的方法。
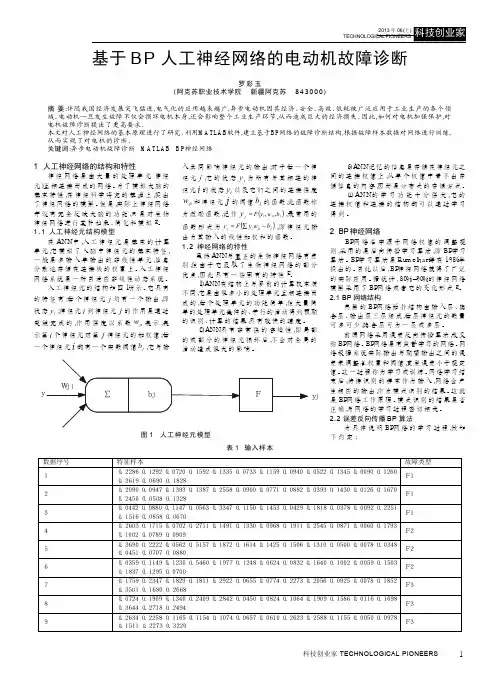
科 技 前 沿2013年06(上)TECHNOLOGICAL P IONEERS1科技创业家 TECHNOLOGICAL PIONEERS 1 人工神经网络的结构和特性神经网络是由大量的处理单元(神经元)互相连接而成的网络。
为了模拟大脑的基本特性,在神经科学研究的基础上,提出了神经网络的模型。
但是,实际上神经网络并没有完全反映大脑的功能,只是对生物神经网络进行某种抽象、简化和模拟[1]。
1.1人工神经元结构模型在ANN中,人工神经元是基本的计算单元,它模拟了人脑中神经元的基本特征,一般是多输入单输出的非线性单元,信息分散地存储在连接线的权重上。
人工神经网络系统是一种自适应非线性动态系统。
人工神经元的结构如图1所示。
它具有的特征有:每个神经元j 均有一个输出,即状态j y ;神经元i 到神经元j 的作用是通过突触完成的,作用强度以系数ji w 表示,表示第i 个神经元对第j 神经元的加权值;每一个神经元i 都有一个实数阈值j b ,它与输入共同影响神经元的输出;对于每一个神经元j ,它的状态j y 为所有与其相连的神经元i 的状态i y 以及它们之间的连接强度ji w 和神经元j 的阈值j b 的函数,此函数称为激励函数,记作j y ()j ji i b w y F ,,=,最常用的函数形式为()j ji i j b w y F y −∑=,即神经元输出为其输入的线性加权和的函数。
1.2神经网络的特性虽然ANN与真正的生物神经网络有差别,但由于它汲取了生物神经网络的部分优点,因此具有一些固有的特性[2]。
(1)ANN在结构上与目前的计算机本质不同,它是由很多小的处理单元互相连接而成的,每个处理单元的功能简单,但大量简单的处理单元集体的、并行的活动得到预期的识别、计算的结果,具有较快的速度。
(2)ANN具有非常强的容错性,即局部的或部分的神经元损坏后,不会对全局的活动造成很大的影响。
(3)ANN记忆的信息是存储在神经元之间的连接权值上,从单个权值中看不出存储信息的内容,因而是分布式的存储方式。
基于神经网络异步电动机故障诊断毕业论文目录第一章绪论 (1)1.1 异步电动机工作原理及用途 (1)1.2 异步电动机常见故障类型及方法 (1)1.2.1 异步电动机常见故障类型 (1)1.2.2 故障诊断方法 (1)1.3 神经网络在故障诊断中的应用 (2)1.4 神经网络特点 (3)1.5 神经网络故障诊断实现步骤 (4)第二章神经网络概述 (4)2.1 BP神经网络 (5)2.2 BP网络模型结构 (5)2.2.1 神经元模型 (5)2.2.2 前馈型神经网络 (6)2.3 BP网络学习算法 (7)2.3.1 学习算法 (7)2.3.2 神经网络的实现过程 (11)第三章异步电动机在MATLAB中的建模仿真及故障设置 (12)3.1 异步电动机在MATLAB中的建模 (12)3.1.1 选择模块 (12)3.1.2 搭建模块 (12)3.1.3 模块参数设置 (13)3.2 三相异步电动机故障设置及故障特征提取 (16)3.2.1 故障设置 (17)3.2.2 故障仿真 (18)3.2.3 特征量提取及预处理 (23)第四章故障诊断实例 (26)4.1 BP神经网络的构建 (26)4.2 BP网络设计 (26)4.2.1 网络创建 (26)4.2.2 网络训练与测试 (27)结论 (30)参考文献 (31)附录 (32)致谢 (35)第一章绪论1.1 异步电动机工作原理及用途三相异步电动机也被称作感应电动机,当其定子侧通入电流以后,部分磁通将穿过短路环,并在短路环产生感应电流。
短路环的电流阻碍磁通的变化,致使有短路环部分和没有短路环部分产生的磁通有了相位差,从而形成旋转磁场。
转子绕组因与磁场间存在着相对运动而感生电动势和感应电流,即旋转磁场与转子存在相对转速,并与磁场相互作用产生电磁转矩,使转子转起来,从而实现能量转换。
三相异步电动机具有结构简单,成本较低,制造、使用和维护方便,运行可靠以及质量较小等优点,从而被广泛应用于家用电器、电动缝纫机、食品加工机以及各种电动工具、小型机电设备中,在工农业、交通运输、国防工业以及其他各行各业中应用也非常广泛。
BP神经网络与鱼群优化结合在异步电机故障中的应用摘要:在电机的故障诊断中应用BP神经网络建立起异步电机的BP神经网络诊断模型。
由于BP神经网络学习算法容易陷入局部最优,我们引入鱼群算法来优化BP神经网络径向基函数、隐含层层数以及隐含层节点数量、以获得最优的网络模型。
仿真结果表明优化后的BP神经网络的泛化能力和诊断精度都得到了大幅度提高。
关键词: 异步电机、故障诊断、BP基神经网络、鱼群算法引言本文将BP神经网络应用到电机的故障诊断中。
BP神经网络具有较快的学习速度以及较好的分类能力,可以实现电机的故障诊断和状态识别。
但其参数确定比较困难,因此,文中引入了鱼群算法,来优化BP神经网络基函数,隐含层层数以及隐含层节点数量。
最后,对本文所设计的诊断系统进行了仿真,用训练样本对鱼群算法的BP神经网络进行训练,网络训练完成后,建立了基于BP神经网络的异步电机故障诊断系统。
1.BP神经网络与差分进化算法BP神经网络BP神经网络是一种具有多隐含层的反向回传网络。
第1层为输入层由许多信号源节点构成;第2层以及后续若干层为隐含层,隐单元的作用函数为径向基函数;最后一层为输出层,主要对输入作出响应。
隐含层单元作用函数对输入将会产生响应,该响应乘以本隐含层节点的权重,与别的隐含层节点的输出进行线性相加。
即为输出的结果。
输出结果会与设定结果进行对比,产生的差值将会反向回传,修正隐含层节点的权值。
鱼群优化鱼群算法通过设计一种无质量的粒子来模拟鸟群中的鸟,粒子仅具有两个属性:速度和位置,速度代表移动的快慢,位置代表移动的方向。
每个粒子在搜索空间中单独的搜寻最优解,并将其记为当前个体极值,并将个体极值与整个鱼群里的其他粒子共享,找到最优的那个个体极值作为整个鱼群的当前全局最优解,鱼群中的所有粒子根据自己找到的当前个体极值和整个鱼群共享的当前全局最优解来调整自己的速度和位置。
通过多次的迭代计算,可以在待定参数模型中通过多次的寻优计算找到结果最优情况下的对应的参数值。
基于BP神经网络模型的电机故障诊断专家系统BP Neural Network Model Based Expert Syste m of Fault Diagno stic of E lectricalMachinery黄 丹 黄采伦(湘潭工学院信息与电气工程系,湘潭 411201)摘 要 针对传统机械设备故障诊断专家系统存在知识获取能力弱、求解有一定局限性等问题,介绍了BP神经网络旋转机械故障诊断专家系统,对单位BP算法,BP神经网络的建立、训练及应用作了具体说明。
该系统学习效率高,故障诊断准确,已成功应用于铁路机车走行部的轮对电机在线故障诊断。
关键词 BP算法 神经网络 故障诊断 电机 专家系统Abstract T o against the weakness of capability of knowledge acquisition and lim itation of obtaining s olution in traditional fault diagnostic expert system for ma2 chinery equipment,the BP neural netw ork based expert system of fault diagnostic for rotating machinery is introduced.The unit BP alg orithm,BP neural netw ork establishment,training and application of the system are described concretely.The system features high efficiency learning and proper fault diagnosis and has been used success fully in fault diagnostic of electrical machinery of railway locom otives.K ey w ords BP alg orithm Neural netw ork Fault diagnostic E lectrical machinery Expert system0 引言机械设备故障诊断是识别设备运行状态的一门新兴学科,它研究的是设备运行状态的变化在诊断信息中的反映,其研究内容包括对机器运行现状的识别诊断、对其运行过程的监测以及对其运行发展趋势的预测等三个方面。
基于BP神经网络的煤矿电机故障诊断预测鲁建东;鲁啸【摘要】The motor maintenance engineer has plagued by the identification diagnosis of motor soft fault. The paper introduces the concept of BP neural network, and uses the sample data collected to train BP neural network, and then obtains the optimal network model. The typical fault state parameter is used to test the discrimination ability of the new method. By the training and test of coal mine motor parameters, the simulation can verify the effectiveness of the new method for electric fault diagnosis.%电机软故障辨识诊断一直是困扰电机维修工程师一大难题。
引入BP 神经网络概念,利用采集到的样本数据训练BP神经网络,得出最优网络模型。
通过典型故障状态参数测试新方法的辨别能力。
结合对煤矿电机参数的训练测试,通过仿真实验验证了这种新方法对电气故障诊断的有效性。
【期刊名称】《机电设备》【年(卷),期】2013(000)005【总页数】4页(P17-20)【关键词】BP神经网络;煤矿电机;故障诊断【作者】鲁建东;鲁啸【作者单位】江苏省徐州市泉山区庞庄煤矿物业公司,江苏徐州 221141;国电南瑞科技股份有限公司,江苏南京 210032【正文语种】中文【中图分类】TM32由于电机材料、电子电路故障等因素影响,在电机运行时,会产生局部放电现象,尤其对煤矿企业,电机运行时,电机火花会给操作现场带来非常严重的后果。
84. 异步电机的故障诊断方法有哪些?关键信息项:1、异步电机常见故障类型定子故障转子故障轴承故障气隙不均匀故障绕组故障2、故障诊断方法分类基于电气参数的诊断方法基于机械参数的诊断方法基于温度参数的诊断方法基于振动信号的诊断方法基于声学信号的诊断方法3、诊断方法的具体原理与应用不同方法的工作原理适用场景和优缺点11 异步电机常见故障类型111 定子故障定子故障主要包括定子绕组短路、断路、绝缘损坏等。
定子绕组短路可能是由于匝间短路、相间短路引起,这会导致电流异常增大,电机发热严重。
断路则会使电机无法正常工作。
绝缘损坏会导致漏电,威胁电机的安全运行。
112 转子故障转子故障常见的有转子断条、端环开裂、偏心等。
转子断条会使电机的转矩产生波动,运行不平稳。
偏心会导致气隙不均匀,增加电机的振动和噪声。
113 轴承故障轴承故障表现为磨损、疲劳、润滑不良等。
这会引起电机的振动加剧,噪声增大,甚至可能导致转轴卡死。
114 气隙不均匀故障气隙不均匀通常是由于安装不当、定子或转子变形等原因造成。
它会影响电机的性能,导致磁场分布不均,增加损耗。
115 绕组故障绕组故障除了上述提到的短路和断路,还可能有绕组接地、接线错误等问题。
12 故障诊断方法分类121 基于电气参数的诊断方法这种方法通过监测电机的电流、电压、功率等电气参数来判断故障。
例如,通过分析定子电流的频谱,可以发现与故障相关的特征频率成分。
122 基于机械参数的诊断方法主要包括对电机的振动、转速、转矩等机械参数的监测和分析。
利用振动传感器获取振动信号,通过频谱分析来诊断故障。
123 基于温度参数的诊断方法借助温度传感器测量电机各部位的温度,温度异常升高往往暗示着存在故障。
例如,定子绕组过热可能表示绕组短路。
124 基于振动信号的诊断方法振动信号包含丰富的电机运行状态信息。
通过对振动信号的时域、频域分析,可以准确诊断出多种故障。
125 基于声学信号的诊断方法采集电机运行时产生的声音信号,分析其频率和幅值特征,来判断是否存在故障。
异步电机故障诊断方法介绍异步电机是工业生产中常用的一种电动机,但在使用过程中可能出现各种故障。
故障诊断是及时维护和修复异步电机的重要环节,有效的故障诊断方法可以减少生产事故和停机时间,提高设备可靠性和生产效率。
一种常用的异步电机故障诊断方法是霍尔效应传感器诊断技术。
这种技术利用霍尔效应传感器测量电机转子的位置和速度,通过不同位置的信号差异来判断电机是否存在故障。
当电机运行时,霍尔效应传感器会产生信号,这些信号经过信号处理器处理后会得到电机转子的位置信息。
若出现故障,转子位置信号会发生异常,从而可以诊断出电机故障。
另一种常用的异步电机故障诊断方法是电流谐波分析技术。
电机故障会导致电机运行时产生不同的电流谐波,利用电流谐波分析技术可以检测出这些异常谐波,从而判断电机是否存在故障。
通过监测电机运行时的电流谐波情况,可以及时发现电机转子断条、轴承磨损、绕组短路等故障。
除了以上两种方法,还有振动分析、热像检测、声波分析等多种异步电机故障诊断方法。
这些方法各有特点,可以相互补充,从不同角度全面诊断电机故障,提高诊断的准确性和可靠性。
在实际应用中,可以根据电机的具体运行情况和设备条件选择合适的故障诊断方法进行维护和修复。
总而言之,异步电机故障诊断是确保生产设备正常运行的重要环节,采用合适的诊断方法进行故障诊断可以及时发现和修复电机故障,提高设备可靠性和生产效率。
很多工业生产的过程离不开电机,而异步电机是其中应用最为广泛的一种。
然而,就像其他设备一样,异步电机也可能会出现各种故障。
因此,在工业生产中,对异步电机的故障诊断确实是至关重要的。
这不仅有助于提高设备的可靠性和生产效率,还能减少生产中的停机时间和事故发生率。
所以,选择有效的异步电机故障诊断方法至关重要。
一种广泛使用的异步电机故障诊断方法是霍尔效应传感器诊断技术。
这种技术能够测量电机转子的位置和速度,通过不同位置的信号差异来判断电机是否存在故障。
当电机运行时,霍尔效应传感器会产生信号,这些信号经过信号处理器处理后会得到电机转子的位置信息。
第30卷第2期1998年6月西安建筑科技大学学报J.Xi’an U niv.of Arch.&T ech.V ol.30N o.2Jun.1998基于BP网的异步电机故障诊断方法董建园段志善(西安建筑科技大学机械工程系,西安,710055;第一作者男,26岁,硕士摘要在对异步电机三类典型故障机理的分析基础之上,提出了基于BP网的诊断方法,建立了适宜于异步电机故障诊断的网络模型和电气故障模板,开发出基于BP网的电机故障诊断软件.关键词BP网;故障机理;故障模板;诊断方法中图分类号T P391The diagnostic method of a synchronous motorbased on the BP neural networkDong J iany uan Duan Zhishan(D ept.of M ech.Eng.,Xi’an U niv.of Ar ch.&T ech.,X i’a n,710055Abstract By analy sing the thr ee ty pical fault mechanism of t he m oto r,the paper has put for war d a diagno st ic method based o n t he BP neur al net wo rk.At the same tim e,the netw or k mo del and t he standar d moto r electr ical fault patt ern appr opr iate fo r mo tor failure diag nosis ar e set up.A diag no stic softw ar e ba sed on the BP neur al net wo rk w as pro-gr amed.Key words B P neural networ k,f ault mechanism,standr ded f ault p attern,diagnostic method交流异步电动机是当今用于驱动各种机械和工业设备的最通用装置,通过识别运行中的电机故障,以防止灾难性的事故发生,一直是人们关注的问题.异步电动机常见的故障有三类,定子绕组故障、转子绕组故障和气隙偏心故障.电机发生故障的类型取决于电机的种类和工作环境.在电机出现电的或机械的故障之前,总会呈现机械的、电磁的、声学的及绝缘系统的劣化征兆.如果在电机出现故障之前,能及时地检测到反应电机劣化状态的参数,并对行将出现的故障发出警报,就可避免恶性事故的发生和不必要的停机造成的重大经济损失[1].这里,我们通过监测定子的电流,采用电流分析法对异步电动机的电气故障进行诊断.1机理分析电机故障的诊断方法,是根据故障时运行电机所表现出的特征参量的变化,或者说故障征兆来确定的.通过对电机三类典型故障机理的分析我们得出如下结论:转子绕组故障时,其电流特征频率表达式为:f s=[v(1-S±S]f(v=1,3,5,…,即转子绕组故障后,不对称的异步电机转子将在定子绕组中感应出上述电流频率分量,其大小由转子不对称的严重程度而定.其最明显的特征是在基波两侧出现2Sf为大小的边频带.收稿日期:1997-11-20电机发生气隙偏心故障后,改变了电机定转子之间的正常的气隙磁通波形,气隙磁通波形随空间和时间而变化.这些谐波磁通相对定子移动,它们在静止的定子绕组中感应出相应的电流谐波,即定子电流中出现新的谐波分量.f s =[1±(1-S /p ]f =f ±f r , f s =[(R ±1(1-S /p ±1]f =(R ±1f r ±f ,f s =[R (1-S /p ±1]f =Rf r ±f .其中f r 为转子旋转频率;R f r ±f 为主齿谐波;f 为基波;S 为滑差;p 为极对数.电机在正常运转的情况下,含有基波和主齿谐波.当电机发生静偏心时,主齿谐波分量将会增大;当电机处于动偏心状态时,定子电流被旋转频率所调制,呈现在电流信号的谱图中,是在基波和主齿谐波的两侧分别出现以旋转频率为大小的边频带.此外,气隙偏心时,电机各相绕组内部和彼此之间的电感发生变化,这进一步导致定子各相电流的有效值增大.当电机发生定子绕组故障时,绕组内部不对称,此时,气隙磁场中有较强的空间谐波,定子电流中有较强的时间谐波.其表现是,3次谐波和5次谐波明显增大,三相电流不对称,故障相电流恒为最大,三相电流之间的相位差偏离120°.但是,由于故障征兆与故障模式之间的复杂性和实际中的非线性,给诊断带来了困难.同一种故障可能导致多个特征参量的变化,同一特征参量的变化也可能由多种故障所引起.比如,电机发生定子绕组故障会使气隙磁场畸变,引起或多或少的偏心.而转子绕组故障也会导致三相电流的不对称和气隙偏心.故障之间的耦合,使得单纯依靠某一故障特征参量来识别故障的准确性并不高.人工神经网络以其高度的并行处理、联想记忆、自学习以及极强的非线性映射能力,在各个领域得到了广泛应用,显示了极强的生命力.因此,我们想借助于神经网络的极强的非线性映射能力,实现由故障征兆或者说故障特征参量空间向故障模式空间的映射,从而达到对故障模式的识别.这里,我们采用最具代表性和应用最为广泛的BP 网.2神经元的基本特性和BP网络模型图1神经元结构模型神经网络(见图1是由大量神经元按一定的拓扑结构互相连接而成,每个神经元是神经网络的基本处理单元.一般是多个输入,一个输出的非线性单元.图中Y i 是神经元的输出,i 是阀值,X j 为输入信号,W ji 表示从神经元U j 到U i 的连接权值,S i 表示外部输入信号.上述模型可描述为: i =∑W j i X i +S i ,Y i =f ( i - i ,其中f 为激活函数.人工神经元的信息处理分三个部分,首先完成输入信号与神经元联接强度内运算,然后再将其结果通过激活函数(如Sigm ond 函数,再经过阀值函数判决,如果输出值大于阀值,则该神经元被激活,否则处于抑制状态.神经元按一定模式连接成网络型,神经元之间的连接权值的大小反应信号传递的强弱[2].BP 网络模型(见图2.BP 网是误差反向传播的多层前馈网络,是人工神经网络中最具代表性和应用最为广泛的一种网络模型.它由输入层、隐含层、输出层组成.在网络中,信号由输入单向传至输出,且同一层的神经元之间互不传递信号.每个神经元与相邻层的所有神经元相连.某一层的神经元的输出值通过连接权系数的加强或抑制传输到下一层的神经元.除了输入层外,每一神经元的输入为前一层所有神经元之输出值的加权和.3BP 算法(误差反向传播算法误差反向传播算法是一个监督训练多层神经网络的算法,每一个训练范例在网络中经过两遍的传递计算.一遍是前向传播计算,从输入开始,传递各层并经过处理后,产生一个输出,并得到一个该实际输出和所需输出之差的误差失量.另一遍是反向传播计算,从输出层到输入层,利用差错失量对权值进行逐层修改.160西安建筑科技大学学报第30卷图2网络模型训练的目的是用一组输入矢量产生一组所希望的输出矢量.它是应用一系列输入矢量通过预先确定的算法调整网络的权值来实现的.设第P 个样本的故障特征向量为网络输入层的输入矢量[X p ]=[X p 1,X p 2,…,X p n ]对应的网络输出层状态输出向量[Y p ]=[Y p 1,Y p 2, …,Y pm ]各个神经元激励函数选用Sigmo nd 函数 f (x =1/{1+ex p[-(x + ]}则输入层第i 个神经元的输出为O p i =X pi隐含层第j 个神经元的输入为net p j =∑i W pj i O p i那么隐含层第j 个神经元的输出为O pj =f (net pj =11+ex p[-(net pj + j ]输出层第k 个神经元的输入值为net p k =∑j W pkj O pj输出层第k 个神经元的输出值为O pk =f (net pk =11+ex p[-(net pk + k ]在训练该网络的学习阶段,由给定的模式[X p ]为网络输入,要求网络通过调节所有的连接权系数和各个神经元的阀值,使得在输出层神经元上得到所需要的理想输出值[Y pk ],一般来说,网络输出[O p k ]与理想输出[Y pk ]不完全一致.对各个样本,其平方误差为:E p =0.5∑k(Y pk -O p k 2;而全体样本的平方误差则为E =12p ∑p ∑k(Y pk -O pk 2,式中p 为训练样本数.用学习规则,权值W 有如下调整公式:(1对于输出层与隐含层:(2对于隐含层与输入层之间:!W kj (n +1=∀ k O p j +#!W kj (n!W ji (n +1=∀ j O p i +#!W j i (n W kj (n +1=W kj (n +∀ k O pj +#!W kj (nW j i (n +1=W ji (n +∀ j O pi +#!W ji (nk =(Y p k -O pk O p k (1-O p k j =O p j (1-O pj ∑k( k W kj ∀为学习常数; 为神经元的差值;#为动量常数,用于调整网络学习的收敛速度.4异步电机电气故障诊断网络模型的建立和训练4.1网络输入层神经元的确定原则(即故障特征参量由于电机的结构型式、容量和所处的工作环境不同,其工作参数是不同的,因而对特定电机的分析结果一般不具有普遍意义.此外,大部分现场不可能为诊断提供详尽的电机运行参数,这就要求选择具有广泛适用性的特征参量作为输入神经元.因此,故障特征参量的选取遵循以下原则: 无量纲化,无量纲量一般不受电机容量大小的影响,与电机结构、型式和尺寸没有必然的联系; 它具有变量特征,能够反应故障程度的变化; 易于区分故障;!特征参量在工程上易于提取.4.2训练样本的选取神经网络诊断方法相比于逻辑识别具有更强的容错能力,即不会因在某一特征参量上的判别的失误而导致误判,这在一定程度上降低了误判的风险[3].但该方法要求训练样本非常丰富,其诊断的精度依赖于该领域经验和知识的多少.为此,我们建立了适于异步电机故障分析的多回路模型,通过对电机三类典型故障各特征参量大量的仿真数据,以及故障模拟实验来获得样本.本网络采用3层BP 网络结构,输入层节点数为7,隐含层节点数为10,输出层节点数为3.电机定子电流谱图中,各故障特征频率所对应的幅值X =[X 1,X 2,…,X n ]与基波幅值之比作为网络的输入,各161第2期董建园等:基于BP 网的异步电机故障诊断方法162西安建筑科技大学学报第30卷个特征频率对应输入层的神经元.电机的各种故障状态Y=[Y1,Y2,…,Y m]作为网络的输出,故障类型对应输出层神经元.隐含层节点H=[H1,H2,…,H s]用于提取信号中高阶相关特性。
基于小波包和改进BP神经网络算法的电机故障诊断作者:李春华荣明星来源:《现代电子技术》2013年第15期摘要:为了对电机故障实现智能化诊断,仿真实验中将采取基于故障振动信号的诊断方法。
在实验过程中用小波包分析技术得到故障信号的特征向量。
然后用改进的BP神经网络算法即弹性BP算法(RPROPA)来进行神经网络训练,当误差精度符合要求后,用测试样本数据对神经网络进行检测。
通过Matlab平台进行仿真实验来证明小波包神经网络诊断系统能够实现电动机故障类型的智能化诊断。
从而减轻企业经济负担,为电机操作人员提供更可靠的安全保障。
关键词:故障诊断;小波变换;神经网络;电机中图分类号: TN911.6⁃34 文献标识码: A 文章编号: 1004⁃373X(2013)15⁃0133⁃04 Motor fault diagnosis based on wavelet packet and improvedBP neural network algorithmLI Chun⁃hua1, RONG Ming⁃xing2(1. Heilongjiang University of Science and Technology, Harbin 150027, China;2. School of Electric and Information Engineering, Heilongjiang University of Science and Technology, Harbin 150027, China)Abstract: In order to realize intelligentization of motor fault diagnosis, The fault diagnosis method based on vibration signal was adopted in simulation experiment. In the experiment process,the wavelet packet analysis technique was used to obtain the feature vector of fault signal, and the improved BP neural network algorithm, elastic (RPROPA) BP algorithm, was used for neural network training. When the error accuracy meets the requirement, the test sample data is used to test the neural network. The simulation experiment on Matlab platform show that the wavelet packet neural network diagnosis system can implement the intelligent diagnosis of motor fault, reduce the economic burden of enterprises, and provide a more reliable security assurance for motor operation personnel.Keywords: fault diagnosis; wavelet transform; neural network; motor0 引言在当代工业生产过程中,电动机已经成为了不可或缺的重要动力设备。
基于BP神经网络算法的异步电机故障诊断系统研究作者:***来源:《荆楚理工学院学报》2024年第02期摘要:为了确保电机安全可靠地运行,研究了BP神经网络算法对异步电动机进行故障诊断。
通过MATLAB平台,分别使用附加动量因子和自适应学习率两种梯度下降法进行网络训练,搭建故障诊断BP网络模型。
以MSE值为指标优化最佳隐含层节点数、动量因子与学习率,并通过遗传算法来优化BP网络的初始权值,对故障测试样本进行仿真测试。
结果表明,GA-BP网络模型比MF-BP和AG-BP的MSE值更低,仅为0.009 163,优化后的诊断预测结果与目标值几乎没有差别。
基于遗传算法改进的故障诊断系统模型能够满足异步电动机故障诊断的应用需求。
关键词:故障诊断;MATLAB;BP神经网络;遗传算法;网络优化中图分类号:TP183 文献标志码:A 文章编号:1008-4657(2024)02-0001-100 引言随着科技的发展,电机在高铁、磁悬浮列车、飞机电磁弹射装置等新设施上的应用也越来越广泛了,在提供舒适、快捷服务和有力保障的同时,如何确保电机安全可靠地运行,成为人们关注的重要问题[ 1 ]。
故障初期的电机,往往会产生诸如机械异常振动和电流信号变化异常等不同形式的异常特征变化,那么利用这些异常变化的特征就可第一时间对电机的故障进行准确地检测和诊断,从而快速、精确地诊断出电动机故障类型及故障部位,从而减少电机维修所花费的时间[ 2 ]。
人工神经网络(Artificial Neural Network,ANN)的电机故障诊断法是基于反向传播的异步电机故障诊断系统的设计核心,该电机故障诊断法是目前智能化程度相对较高、应用前景也相对较为广阔的一种电机故障诊断法[ 3 ]。
其中,反向传播神经网络(Back Propagation Neural Network,BP网络)故障诊断法不只限于完成故障诊断,也能进行故障严重性评估,甚至可以进行故障预测[ 4 ]。
第30卷 第2期1998年6月西安建筑科技大学学报J.Xi’an U niv.of Arch.&T ech.V ol.30 N o.2Jun.1998基于BP网的异步电机故障诊断方法董建园 段志善(西安建筑科技大学机械工程系,西安,710055;第一作者男,26岁,硕士)摘 要 在对异步电机三类典型故障机理的分析基础之上,提出了基于BP网的诊断方法,建立了适宜于异步电机故障诊断的网络模型和电气故障模板,开发出基于BP网的电机故障诊断软件.关键词 BP网;故障机理;故障模板;诊断方法中图分类号 T P391The diagnostic method of a synchronous motorbased on the BP neural networkDong J iany uan Duan Zhishan(D ept.of M ech.Eng.,Xi’an U niv.of Ar ch.&T ech.,X i’a n,710055)Abstract By analy sing the thr ee ty pical fault mechanism of t he m oto r,the paper has put for war d a diagno st ic method based o n t he BP neur al net wo rk.At the same tim e,the netw or k mo del and t he standar d moto r electr ical fault patt ern appr opr iate fo r mo tor failure diag nosis ar e set up.A diag no stic softw ar e ba sed on the BP neur al net wo rk w as pro-gr amed.Key words B P neural networ k,f ault mechanism,standr ded f ault p atter n,diagnostic method交流异步电动机是当今用于驱动各种机械和工业设备的最通用装置,通过识别运行中的电机故障,以防止灾难性的事故发生,一直是人们关注的问题.异步电动机常见的故障有三类,定子绕组故障、转子绕组故障和气隙偏心故障.电机发生故障的类型取决于电机的种类和工作环境.在电机出现电的或机械的故障之前,总会呈现机械的、电磁的、声学的及绝缘系统的劣化征兆.如果在电机出现故障之前,能及时地检测到反应电机劣化状态的参数,并对行将出现的故障发出警报,就可避免恶性事故的发生和不必要的停机造成的重大经济损失[1].这里,我们通过监测定子的电流,采用电流分析法对异步电动机的电气故障进行诊断.1 机理分析电机故障的诊断方法,是根据故障时运行电机所表现出的特征参量的变化,或者说故障征兆来确定的.通过对电机三类典型故障机理的分析我们得出如下结论:转子绕组故障时,其电流特征频率表达式为:f s=[v(1-S)±S]f(v=1,3,5,…),即转子绕组故障后,不对称的异步电机转子将在定子绕组中感应出上述电流频率分量,其大小由转子不对称的严重程度而定.其最明显的特征是在基波两侧出现2Sf为大小的边频带.收稿日期:1997-11-20电机发生气隙偏心故障后,改变了电机定转子之间的正常的气隙磁通波形,气隙磁通波形随空间和时间而变化.这些谐波磁通相对定子移动,它们在静止的定子绕组中感应出相应的电流谐波,即定子电流中出现新的谐波分量.f s =[1±(1-S )/p ]f =f ±f r , f s =[(R ±1)(1-S )/p ±1]f =(R ±1)f r ±f ,f s =[R (1-S )/p ±1]f =Rf r ±f .其中f r 为转子旋转频率;R f r ±f 为主齿谐波;f 为基波;S 为滑差;p 为极对数.电机在正常运转的情况下,含有基波和主齿谐波.当电机发生静偏心时,主齿谐波分量将会增大;当电机处于动偏心状态时,定子电流被旋转频率所调制,呈现在电流信号的谱图中,是在基波和主齿谐波的两侧分别出现以旋转频率为大小的边频带.此外,气隙偏心时,电机各相绕组内部和彼此之间的电感发生变化,这进一步导致定子各相电流的有效值增大.当电机发生定子绕组故障时,绕组内部不对称,此时,气隙磁场中有较强的空间谐波,定子电流中有较强的时间谐波.其表现是,3次谐波和5次谐波明显增大,三相电流不对称,故障相电流恒为最大,三相电流之间的相位差偏离120°.但是,由于故障征兆与故障模式之间的复杂性和实际中的非线性,给诊断带来了困难.同一种故障可能导致多个特征参量的变化,同一特征参量的变化也可能由多种故障所引起.比如,电机发生定子绕组故障会使气隙磁场畸变,引起或多或少的偏心.而转子绕组故障也会导致三相电流的不对称和气隙偏心.故障之间的耦合,使得单纯依靠某一故障特征参量来识别故障的准确性并不高.人工神经网络以其高度的并行处理、联想记忆、自学习以及极强的非线性映射能力,在各个领域得到了广泛应用,显示了极强的生命力.因此,我们想借助于神经网络的极强的非线性映射能力,实现由故障征兆或者说故障特征参量空间向故障模式空间的映射,从而达到对故障模式的识别.这里,我们采用最具代表性和应用最为广泛的BP 网.2 神经元的基本特性和BP网络模型图1 神经元结构模型神经网络(见图1)是由大量神经元按一定的拓扑结构互相连接而成,每个神经元是神经网络的基本处理单元.一般是多个输入,一个输出的非线性单元.图中Y i 是神经元的输出,i 是阀值,X j 为输入信号,W ji 表示从神经元U j 到U i 的连接权值,S i 表示外部输入信号.上述模型可描述为: i =∑W j i X i +S i , Y i =f ( i - i ),其中f 为激活函数.人工神经元的信息处理分三个部分,首先完成输入信号与神经元联接强度内运算,然后再将其结果通过激活函数(如Sigm ond 函数),再经过阀值函数判决,如果输出值大于阀值,则该神经元被激活,否则处于抑制状态.神经元按一定模式连接成网络型,神经元之间的连接权值的大小反应信号传递的强弱[2].BP 网络模型(见图2).BP 网是误差反向传播的多层前馈网络,是人工神经网络中最具代表性和应用最为广泛的一种网络模型.它由输入层、隐含层、输出层组成.在网络中,信号由输入单向传至输出,且同一层的神经元之间互不传递信号.每个神经元与相邻层的所有神经元相连.某一层的神经元的输出值通过连接权系数的加强或抑制传输到下一层的神经元.除了输入层外,每一神经元的输入为前一层所有神经元之输出值的加权和.3 BP 算法(误差反向传播算法)误差反向传播算法是一个监督训练多层神经网络的算法,每一个训练范例在网络中经过两遍的传递计算.一遍是前向传播计算,从输入开始,传递各层并经过处理后,产生一个输出,并得到一个该实际输出和所需输出之差的误差失量.另一遍是反向传播计算,从输出层到输入层,利用差错失量对权值进行逐层修改.160西 安 建 筑 科 技 大 学 学 报 第30卷图2 网络模型训练的目的是用一组输入矢量产生一组所希望的输出矢量.它是应用一系列输入矢量通过预先确定的算法调整网络的权值来实现的.设第P 个样本的故障特征向量为网络输入层的输入矢量 [X p ]=[X p 1,X p 2,…,X p n ]对应的网络输出层状态输出向量 [Y p ]=[Y p 1,Y p 2,…,Y pm ]各个神经元激励函数选用Sigmo nd 函数 f (x )=1/{1+ex p[-(x + )]}则输入层第i 个神经元的输出为 O p i =X pi隐含层第j 个神经元的输入为 net p j =∑i W pj i O p i那么隐含层第j 个神经元的输出为 O pj =f (net pj )=11+ex p[-(net pj + j )]输出层第k 个神经元的输入值为 net p k =∑j W pkj O pj输出层第k 个神经元的输出值为 O pk =f (net pk )=11+ex p[-(net pk + k )]在训练该网络的学习阶段,由给定的模式[X p ]为网络输入,要求网络通过调节所有的连接权系数和各个神经元的阀值,使得在输出层神经元上得到所需要的理想输出值[Y pk ],一般来说,网络输出[O p k ]与理想输出[Y pk ]不完全一致.对各个样本,其平方误差为:E p =0.5∑k(Y pk -O p k )2;而全体样本的平方误差则为E =12p ∑p ∑k(Y pk -O pk )2,式中p 为训练样本数.用 学习规则,权值W 有如下调整公式:(1)对于输出层与隐含层: (2)对于隐含层与输入层之间:!W kj (n +1)=∀ k O p j +#!W kj (n )!W ji (n +1)=∀ j O p i +#!W j i (n )W kj (n +1)=W kj (n )+∀ k O pj +#!W kj (n )W j i (n +1)=W ji (n )+∀ j O pi +#!W ji (n )k =(Y p k -O pk )O p k (1-O p k ) j =O p j (1-O pj )∑k( k W kj )∀为学习常数; 为神经元的差值;#为动量常数,用于调整网络学习的收敛速度.4 异步电机电气故障诊断网络模型的建立和训练4.1 网络输入层神经元的确定原则(即故障特征参量)由于电机的结构型式、容量和所处的工作环境不同,其工作参数是不同的,因而对特定电机的分析结果一般不具有普遍意义.此外,大部分现场不可能为诊断提供详尽的电机运行参数,这就要求选择具有广泛适用性的特征参量作为输入神经元.因此,故障特征参量的选取遵循以下原则: 无量纲化,无量纲量一般不受电机容量大小的影响,与电机结构、型式和尺寸没有必然的联系; 它具有变量特征,能够反应故障程度的变化; 易于区分故障;!特征参量在工程上易于提取.4.2 训练样本的选取神经网络诊断方法相比于逻辑识别具有更强的容错能力,即不会因在某一特征参量上的判别的失误而导致误判,这在一定程度上降低了误判的风险[3].但该方法要求训练样本非常丰富,其诊断的精度依赖于该领域经验和知识的多少.为此,我们建立了适于异步电机故障分析的多回路模型,通过对电机三类典型故障各特征参量大量的仿真数据,以及故障模拟实验来获得样本.本网络采用3层BP 网络结构,输入层节点数为7,隐含层节点数为10,输出层节点数为3.电机定子电流谱图中,各故障特征频率所对应的幅值X =[X 1,X 2,…,X n ]与基波幅值之比作为网络的输入,各161第2期 董建园等:基于BP 网的异步电机故障诊断方法162西 安 建 筑 科 技 大 学 学 报 第30卷个特征频率对应输入层的神经元.电机的各种故障状态Y=[Y1,Y2,…,Y m]作为网络的输出,故障类型对应输出层神经元.隐含层节点H=[H1,H2,…,H s]用于提取信号中高阶相关特性。