灯片
1
Chapter 8
Analog Optical Information Processing
Weimin Sun College of Science
Harbin Engineering University
幻灯片 2
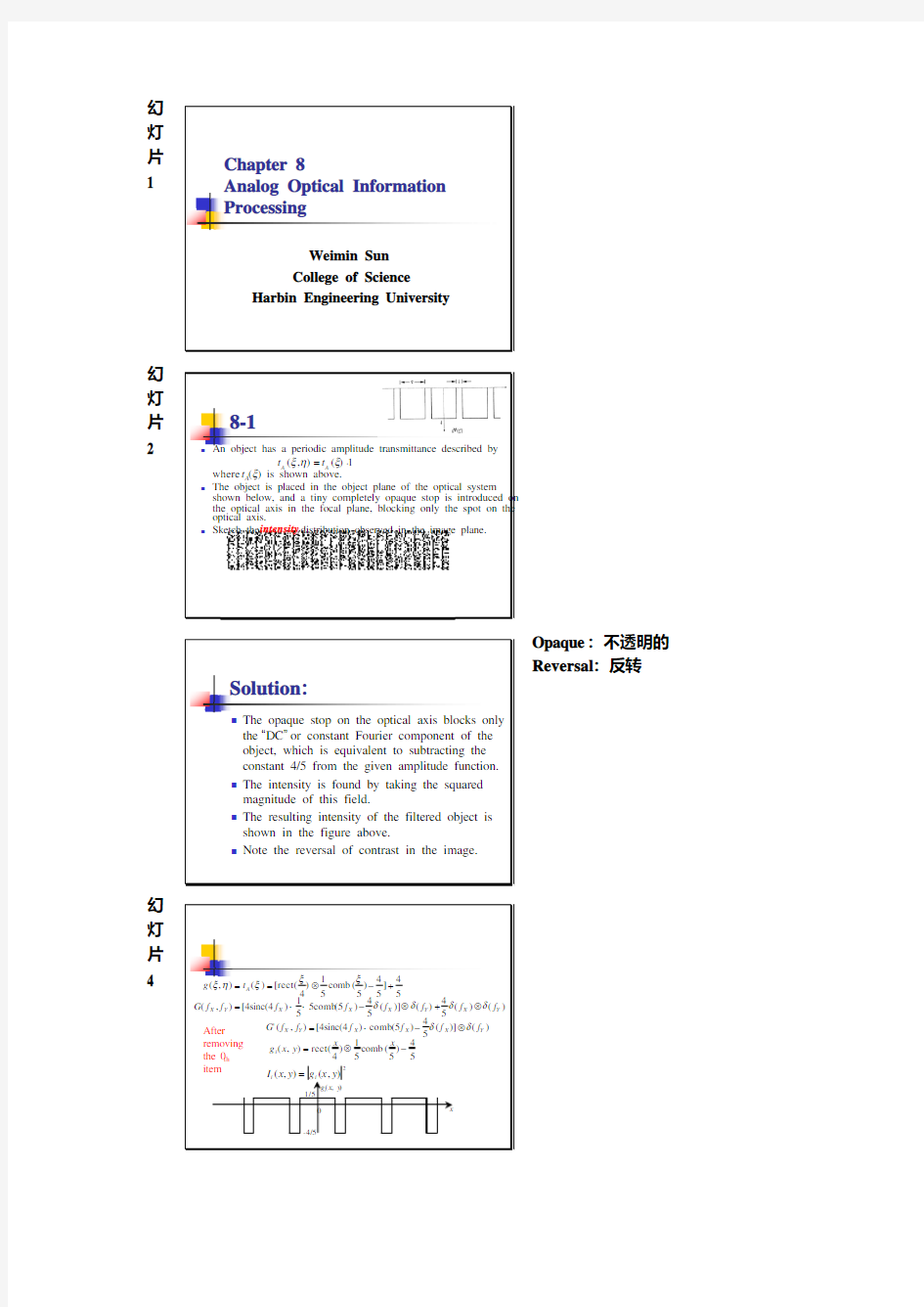
8-1
n
An object has a periodic amplitude transmittance described by
where t A
(ξ) is shown above.
n
The object is placed in the object plane of the optical system
shown below, and a tiny completely opaque stop is introduced on the optical axis in the focal plane, blocking only the spot on the optical axis.
n
Sketch the intensity distribution observed in the image plane.
(,)()1
A A t t ξηξ=?Solution :
n
The opaque stop on the optical axis blocks only the “DC ”or constant Fourier component of the object, which is equivalent to subtracting the constant 4/5 from the given amplitude function. n
The intensity is found by taking the squared magnitude of this field.
n
The resulting intensity of the filtered object is shown in the figure above.
n
Note the reversal of contrast in the image.
Opaque :不透明的 Reversal :反转
幻灯片 4
4
41),=ξξηξ
灯片
5
g(x, y)
幻灯
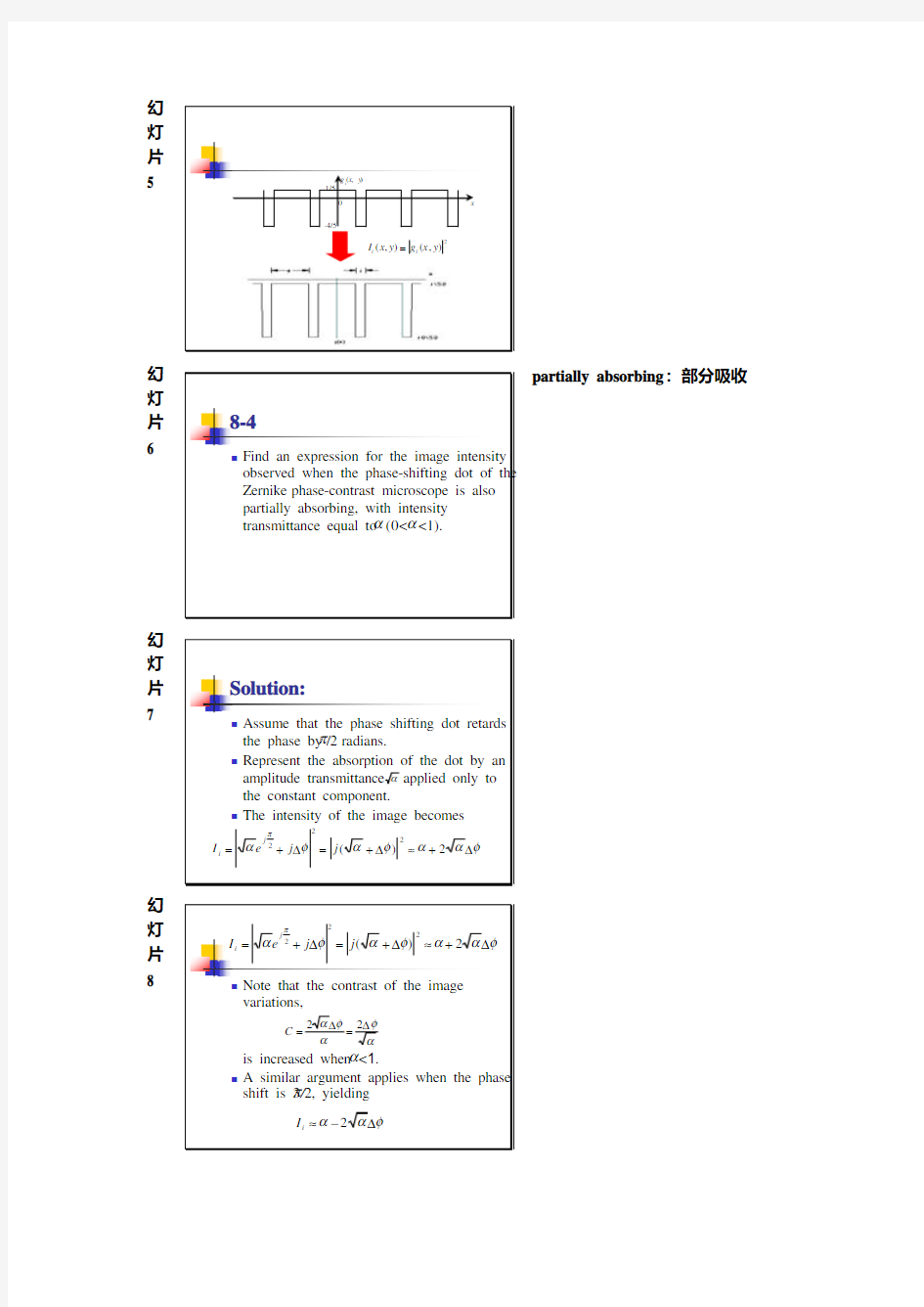
片6 8-4
n Find an expression for the image intensity
observed when the phase-shifting dot of the
Zernike phase-contrast microscope is also
partially absorbing, with intensity
transmittance equal toα(0<α<1).
partially absorbing:部分吸收
幻
灯
片
7
Solution:
幻
灯
片
8
I
幻灯
片9 8-7
Specify:指定
Suppress:抑制
幻灯
片10 Solution:
Restrict:限制,约束,限定
幻灯片11
幻灯片12
cancel out:抵偿
幻灯片 13
2
2
2
幻灯片 14
8-10
n Consider the optical system shown in figure above. n
A transparency with a real and nonnegative amplitude transmittance s 1(ξ,η) is placed in plane P 1and coherently illuminated by a monochromatic, unit -intensity, normally incident plane wave.
n
Lenses L 1and L 2are spherical with common focal length f .
n
In plane P 2, which is the rear focal plane of L 1, a moving diffuser is placed.
Nonnegative :非负的
Diffuser :散射体,漫散屏
幻灯片 15
n
The effect of the moving diffuser can be considered to be the conversion of spatially coherent incident light into spatially incoherent transmitted light, without changing the intensity distribution of the light in plane P 2and without appreciably broadening the spectrum of the light. n
In plane P 3, in contact with L 2, is placed a second transparency, this one with amplitude transmittance s 2(x,y ).
n
Find an expression for the intensity distribution incident on plane P 4.
Conversion :变换 Appreciably :略微 Broaden :变宽
幻灯片 16
Solution:
幻灯片17
Destroy:破坏
幻
灯
片
18 Since the amplitude transmittance function in the pupil
Convolution:卷积
金属学与热处理原理哈工大考研初试经典题目呕心沥血总结 -CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN
哈工大金属学与热处理原理初试经典试题呕心沥血总结题记:权威的答案是考研专业课成功的保证!!!希望这份资料,能够照亮每一个苦苦求学的孩子通往哈工大的漫漫征程。 分享人:刚爷闯天下 第三章 什么是成分过冷画图说明成分过冷是如何形成的(以固相中无扩散,液相中只有扩散而无对流搅拌的情况为例说明)并说明成分过冷对晶体长大方式及铸锭组织的影响。 成分过冷:实质是液相成分变化引起过冷状况发生变化。 异分结晶必然导致溶质在液、固相中的浓度变化,而固溶体的平衡结晶温度则随合金成分的不同而变化,进而引起过冷状况变化。 自己把图画上(共五个) 假设液态金属中仅扩散,即扩散不能充分进行。 ,故将溶质排到界面前由图(a)结晶的固相成分总是低于平衡成分C o 沿,由于不能充分扩散,便在界面处产生溶质浓度梯度薄层。结合图(c)(d),固溶体平衡结晶温度随溶质浓度的变化而变化。将实际温度分布(b)与平衡结晶温度分布(e)叠加,便在固液界面前一定范围的液相中出现了过冷区域。平衡结晶温度与实际结晶温度之差为过冷度,这个过冷度是由于液相中成分变化引起的,故称为成分过冷。 成分过冷对晶体长大方式的影响: 随着成分过冷的增大,固溶体晶体由平面状向胞状、树枝状的形态发展 成分过冷对铸锭组织的影响: 固溶体合金的铸锭组织也是由表层细晶区、柱状晶区、中心等轴晶区组成。当溶质含量固定时,随着G/√R的增加成分过冷区下降,铸锭组织由等轴晶向柱状晶发展;当G/√R固定时,随着浓度的增加,成分过冷区增大,铸锭组织由柱状晶向等轴晶过度,有利于等轴晶形成。 (注:液相中的温度梯度G越小,成长速度R和溶质的浓度C o越大,则有利于形成成分过冷。) 第四章 试述铁碳合金平衡组织中铁素体和渗碳体的形态、特征和数量对合金组织和性能的影响。
一、运动学正解程序及结果 1、程序: syms x1x2x3x4x5x6d1d2d4a2a3x d a Rx=[1 0 0 0;0 cos(x) -sin(x) 0;0 sin(x) cos(x) 0;0 0 0 1]; Rz=[cos(x) -sin(x) 0 0;sin(x) cos(x) 0 0;0 0 1 0;0 0 0 1]; Tx=[1 0 0 a;0 1 0 0;0 0 1 0;0 0 0 1]; Tz=[1 0 0 0;0 1 0 0;0 0 1 d;0 0 0 1]; t=pi/180; y1=90;y2=-90;y3=-90; T01=subs(Rz,x,x1)*subs(Tz,d,d1)*subs(Rx,x,y1*t); T12=subs(Rz,x,x2)*subs(Tz,d,d2)*subs(Tx,a,a2); T23=subs(Rz,x,x3)*subs(Tx,a,a3)*subs(Rx,x,y3*t); T34=subs(Rz,x,x4)*subs(Tz,d,d4)*subs(Rx,x,y4*t); T45=subs(Rz,x,x5)*subs(Rx,x,90); T=T01*T12*T23*T34*T45; t=subs(T,{y1,y3,y4,y5},[pi/2,-pi/2,-pi/2,pi/2]); t= simplify(t); nx=t(1,1);ny=t(2,1);nz=t(3,1); ox=t(1,2);oy=t(2,2);oz=t(3,2); ax=t(1,3);ay=t(2,3);az=t(3,3); px=t(1,4);py=t(2,4);pz=t(3,4); 结果: Nx=sin(x2 + x3)*cos(x1)*sin(x5) - cos(x5)*sin(x1)*sin(x4)+cos(x1)*cos(x2)*cos(x3)*cos(x4)*cos(x5) - cos(x1)*cos(x4)*cos(x5)*sin(x2)*sin(x3) Ny=cos(x1)*cos(x5)*sin(x4) + sin(x2 + x3)*sin(x1)*sin(x5)+cos(x2)*cos(x3)*cos(x4)*cos(x5)*sin(x1) - cos(x4)*cos(x5)*sin(x1)*sin(x2)*sin(x3) Nz=sin(x2 + x3)*cos(x4)*cos(x5) - cos(x2 + x3)*sin(x5) Ox=sin(x4)*(cos(x1)*sin(x2)*sin(x3) - cos(x1)*cos(x2)*cos(x3)) - cos(x4)*sin(x1) Oy=cos(x1)*cos(x4) - sin(x4)*(cos(x2)*cos(x3)*sin(x1) - sin(x1)*sin(x2)*sin(x3)) Oz=-sin(x2 + x3)*sin(x4) Ax=cos(x1)*cos(x2)*cos(x3)*cos(x4)*sin(x5) - sin(x2 + x3)*cos(x1)*cos(x5) - sin(x1)*sin(x4)*sin(x5) - cos(x1)*cos(x4)*sin(x2)*sin(x3)*sin(x5) Ay=cos(x1)*sin(x4)*sin(x5) - sin(x2 + x3)*cos(x5)*sin(x1) + cos(x2)*cos(x3)*cos(x4)*sin(x1)*sin(x5) - cos(x4)*sin(x1)*sin(x2)*sin(x3)*sin(x5)
2017 年秋季季学期研究生课程考核 (读书报告、研究报告) 考核科目:信号检测与处理学生所在院(系):航天学院 学生所在学科:控制科学与工程学生姓名: 学号:17B904012 学生类别:学术型 考核结果 阅卷人
第一部分、信号检测 1.相关函数的基础原理 相关函数定义为两样本积的数学期望,表示随机信号关联程度、变化程度的量度。是任意样本相应的时间平均值,表示两个样本在不同时间上的相关性。相关函数是信号检测理论中的基础,只有弄清相关性的意义,才能了解后面以相关为基础的一系列方法与原理。特别地,自相关函数定义如下(各态历经下表达式可以由概率平均简化为时间平均如最右表达式): ()()()(){}()()()12120 1,,;,lim T xx x T R R t t E x t x t x x p x t x t x t x t dt T τττττ∞ -∞→∞=+=+=+=+??? 公式中的期望是在实际中相当于针对时间取的均值,因此相关函数的定义也看作一种对本身共轭的卷积运算后的平均值:()()()1 xx R x t x t T τ= *-。因此,首先讨论卷积的操作与物理意义。 卷积物理意义是将信号分解成冲激信号之和,借助系统冲激响应求出系统ZS N 对任意激励信号的零状态响应。卷积定义推导如下:将输入信号分解为多个时刻冲激信号的叠加,分别输入并作用于系统如图1。 图1.输入信号的冲激示意图 系统输入与输出的基本关系如下式(1): ()() ()() ()()()() ()()()()()() 1 1 ZS ZS ZS n n ZS k k t N h t t k N h t k f k t k N f k h t k f k t k f t N f k h t k r t δδττττδττττττδττττ--==→→-?→→-???-?→→??-???-?≈→ →??-?≈∑∑(1) 则根据以上线性系统输入输出间对应关系可做出如下推导: ()()()()()()()()()()()() 1 01 01 11n a k n k n k f t f t f k t k t k t k t k f k f k t k τετετετετττ τττδτ-=-=-=??≈=?-?--+??? ??-?--+?=????????? ≈??-?∑∑∑ ()()()10 n k f t f k t k ττδτ-=≈??-?∑,()()()1 n k r t f k h t k τττ-=≈??-?∑ (2) 取极限,n d ττ→∞?→可得()()()()()0t f t f t d f t t τδττδ=-=*?, 即冲激信号与任意输
哈工大金属学与热处理复习资料
★课程考试大纲要求 考试内容 1)金属学理论 a:金属与合金的晶体结构及晶体缺陷 b:纯金属的结晶理论 c:二元合金相图及二元合金的结晶 d:铁碳合金及Fe-Fe 3C 相图 e:三元合金相图 f:金属的塑性变形理论及冷变形金属加热时的组织性能变化 (前六章,去掉6.7节 超塑性) 2)热处理原理及工艺 a:钢的加热相变理论 b:钢的冷却相变理论 c:回火转变理论 d:合金的时效及调幅分解 e:钢的普通热处理工艺及钢的淬透性 (后三章) 题型结构 a:基本知识与基本概念题 (约30分) b:理论分析论述题(约60分) c:实际应用题(约30分) d:计算与作图题(约30分) 试题形式 a:选择题 b:判断题 c:简答与计算 d: 综合题等 ★样题 一、选择题(在每小题的五个备选答案中,选出一个或一个以上正确的答案,将其标号填入括号内。正确的答案没有选全或选错的,该题无分。) 1. 与固溶体相比,金属化合物的性能特点是( )。 ①熔点高、硬度低; ② 硬度高、塑性高;③ 熔点高、硬度高; ④熔点高、塑性低; ⑤ 硬度低、塑性高 2.若体心立方晶胞的晶格常数为a, 则其八面体间隙 ( )。 ① 是不对称的; ② 是对称的; ③ 位于面心和棱边中点; ④ 位于体心和棱边中点; ⑤ 半径为a 4 32- 3.奥氏体是( )。 ① 碳在γ- Fe 中的间隙固溶体; ② 碳在α- Fe 中的间隙固溶体; ③ 碳在α- Fe 中的有限固溶体; ④ 碳在γ- Fe 中的置换固溶体; ⑤碳在α- Fe 中的有序固溶体
4.渗碳体是一种 ( )。 ① 间隙相;② 金属化合物; ③正常价化合物; ④电子化合物;⑤ 间隙化合物 5.六方晶系的[100]晶向指数,若改用四坐标轴的密勒指数标定,可表示为 ( )。 ① []0112;② []0211; ③ []0121;④ []1102;⑤ []0110 6.晶面(110)和(111)所在的晶带,其晶带轴的指数为( )。 ① []101;② []011;③ []101;④ []110;⑤ []011 7.在室温平衡状态下,碳钢的含碳量超过0.9%后,随着含碳量增加,其 ( )。 ① 强度、塑性均下降; ② 硬度升高、塑性下降; ③ 硬度、塑性均下降; ④ 强度、塑性均不变; ⑤强度、塑性均不确定 8. 共晶成分的合金通常具有如下特性 ( )。 ① 铸造性能好; ② 锻造性能好; ③ 焊接性能好; ④ 热处理性能好; ⑤ 机械加工性能好 9. 钢的淬透性取决于 ( )。 ① 淬火冷却速度; ② 钢的临界冷却速度; ③ 工件的尺寸、形状; ④ 淬火介质; ⑤ 奥氏体的稳定性 10.淬火+高温回火被称为 ( )。 ① 时效处理;② 变质处理;③ 调质处理;④ 固溶处理;⑤ 均匀化处理 11.铁素体在加热到A3温度时将转变为奥氏体,这种转变称为 ( )。 ① 同素异晶转变;② 再结晶; ③ 结晶;④ 回复; ⑤ 重结晶 12.下贝氏体是 ( )。 ① 过饱和的α固溶体;② 过饱和的α固溶体和碳化物组成的复相组织; ③ 呈现羽毛状; ④ 呈现板条状; ⑤ 呈现竹叶状 13. 铸铁与碳钢的区别在于有无( )。 ① 渗碳体; ② 珠光体; ③ 铁素体; ④莱氏体; ⑤ 马氏体 14.实际金属一般表现出各向同性,这是因为实际金属为( )。 ① 固溶体; ② 单晶体; ③ 理想晶体; ④ 多晶体;⑤ 金属化合物 15. 合金元素碳溶入铁素体,将引起铁素体 ( )。 ①晶格畸变; ② 固溶强化; ③ 韧性提高; ④ 硬度提高; ⑤ 塑性下降 16. 通常情况下,随回火温度提高,淬火钢的 ( )。 ①强度下降;②硬度下降;③塑性提高;④韧性基本不变; ⑤ 硬度变化较小 17. 完全退火主要适用于 ( )。 ① 亚共析钢;②共析钢;③过共析钢;④ 非铁合金; ⑤ 铸铁合金 18.钢的回火处理工艺是 ( )。
龙源期刊网 https://www.doczj.com/doc/7513851341.html, 哈工大机器人集团产业运营生态圈及机器人产业发展动向 作者: 来源:《机器人产业》2018年第04期 如今,在我们的生活中随处可见机器人的身影,伴随科学技术的快速发展,机器人正变得越来越智能,并且在工业、教育、医疗、安防等诸多领域发挥了重要作用。为进一步推动机器人产业发展,哈工大机器人集团在总结过去实践经验的基础上,构建了一套完整的产业生态圈,并对机器人产业的未来发展方向提出了独到见解。 哈工大机器人集团的产业生态圈 哈工大机器人集团成立于2014年12月,经过三年多的探索,初步形成了以产业集团为组织形式,以产业投资和产业孵化服务为工具,以聚合产业发展资源为特色,以高端技术和高端人才为核心竞争力,以科技成果转化为主要任务和重要利润来源,以产业链整体运营和整体进步为目标的工程化创业模式。哈工大机器人集团的缩写是HRG。因此,我们也把哈工大机器人集团的这种创新、创业和产业模式称为HRG模式。 当前,我国的经济已经发展到了一个关键的节点,增长模式由投资引领升级到创新创业驱动。通过探索和实践,目前HRG已经基本形成自己的产业生态圈,打通了创新、创业、产业联动发展的业务和逻辑链条,能够很好地把项目从哪里来,项目如何孵化,以及项目到哪里去的问题统筹起来,形成一个整体的解决方案,构建了完整的创新体系、创业体系和产业体系。 创新平台 创新平台的作用是有效地整合创新要素和资源。通过相关的创新要素聚集、交流和共享,提高技术向产品转化的效率,降低成本,缩短周期。我们联合了哈工大机器人技术与系统国家重点实验室、国家机器人创新中心、国家机器人检测与评定中心等机构以及HRG自己的产业研究院,在关键性的核心技术上谋求突破,力争抢占全球下一代机器人的技术高地、产业高地和人才高地。 创业平台 通过创业平台服务项目孵化,为孵化企业导入营销、人才、技术、供应链、品牌、基地建设、基金等支撑资源,同时为企业提供核心人才培育服务,从而保障创业者将更多的精力和资源投入到技术研发、产品生产、质量监管等核心环节,专注于企业竞争力的打造,助力企业价值快速体提升。
《检测与信号处理技术》模拟题(补) 一.名词解释 1、容许误差:测量仪器在使用条件下可能产生的最大误差范围,它是衡量仪器的重要指标,测量仪器的准确度、稳定度等指标皆可用容许误差来表征。 2、附加误差:当使用条件偏离规定的标准条件时,除基本误差外还会产生的误差, 3、动态误差:在被测量随时间变化很快的过程中测量所产生的附加误差。 4、精确度:它是准确度与精密度两者的总和,即测量仪表给出接近于被测量真值的能力,准确度高和精密度高是精确度高的必要条件。 5、迟滞:迟滞特性表明仪表在正(输入量增大)反(输入量减小)行程期间输入——输出曲线不重合的程度。 6、静态误差:测量过程中,被测量随时间变化缓慢或基本不变时的测量误差。 7、灵敏度:它表征仪表在稳态下输出增量对输入增量的比值。它是静态特性曲线上相应点的斜率。 8、精密度:对某一稳定的被测量在相同的规定的工作条件下,由同一测量者,用同一仪表在相当短的时间内连续重复测量多次,其测量结果的不一致程度,不一致程度愈小,说明测量仪表越精密,精密度反映测量结果中随机误差的影响程度。 9、灵敏限:当仪表的输入量相当缓慢地从零开始逐渐增加,仪表的示值发生可察觉的极微小变化,此时对应的输入量的最小变化值称为灵敏限,它的单位与被测量单位相同。 10、重复性:表示仪表在输入量按同一方向作全量程连续多次变动时,所有特性曲线不一致的程度。特性曲线一致,重复性好,误差也小。 11、线性度:仪表的静态输入——输出校准(标定)曲线与其理论拟合直线之间的偏差。 二.简答题 1、误差按其出现规律可分为几种,它们与准确度和精密度有什么关系? 答:误差按出现规律可分为三种,即系统误差、随机误差和粗大误差。 (1)系统误差是指误差变化规律服从某一确定规律的误差。系统误差反映测量结果的准确度。系统误差越大,准确度越低,系统误差越小,准确度越高, (2)随机误差是指服从大数统计规律的误差。随机误差表现了测量结果的分散性,通常用精密度表征随机误差的大小。随机误差越大,精密度越低,随机误差越小,精密度越高,即表明测量的重复性越好。
实验一 常用连续时间信号的实现 1 实验目的 (1) 了解连续时间信号的特点; (2) 掌握连续时间信号表示的方法; (3) 熟悉MATLAB 基本绘图命令的应用。 2 实验原理 (1) 信号的定义:信号是带有信息的随时间变化的物理量或物理现象。 (2) 信号的描述:时域法和频域法。 (3) 信号的分类:信号的分类方法很多,可以从不同角度对信号进行分类。 在信号与系统分析中,根据信号与自变量的特性,信号可分为确定信号与随机信号,周期信号与非周期信号,连续时间信号与离散时间信号,能量信号与功率信号,时限与频限信号,物理可实现信号。 3 涉及的MATLAB 函数 (1) 正弦信号; (2) 指数信号; (3) 单位冲激信号; (4) 单位阶跃信号; (5) 抽样信号。 4 实验内容与方法 参考给出的程序并观察产生的信号,并通过改变相关参数(例如频率,周期,幅值,相位,显示时间段等),进一步熟悉这些工程实际与理论研究中常用信号的特征。 5 实验要求 (1) 在MATLAB 中输入程序,验证实验结果,并将实验结果存入指定存储 区。 (2) 要求通过对验证性实验的练习,自行编制完整的程序,实现以下几种 信号的模拟,并得出实验结果。 (1)()(),010f t t t ε==取~ (2)()(),010f t t t t ε==取~ (3)2()5e 5e ,010t t f t t --=-=取~ (4)()cos100cos 2000,=00.2f t t t t =+取~ (5)0.5()4e cos ,=010t f t t t π-=取~ (3)在实验报告中写出完整的自编程序,并给出实验结果。 6 实验结果 (1)()(),010f t t t ε==取~t=-1:0.01:10; 程序和输出如下 y=heaviside(t); plot(t,y);
14、何谓组元?何谓相?何谓固溶体?固溶体的晶体结构有何特点?何谓置换固溶体?影响其固溶度的因素有哪些? 答: 组元:组成合金最基本的、独立的物质。 相:合金中结构相同、成分和性能均一并以界面相互分开的组成部分。 固溶体:合金组元之间以不同的比例相互混合形成的晶体结构与某一组元相同的固相。 固溶体的晶体结构特点:固溶体仍保持着溶剂的晶格类型,但结构发生了变化,主要包括以下几个方面:1)有晶格畸变,2)有偏聚与有序,3)当低于某一温度时,可使具有短程有序的固溶体的溶质和溶剂原子在整个晶体中都按—定的顺序排列起来,转变为长程有序,形成有序固溶体。 置换固溶体:溶质原子位于溶剂晶格的某些结点位置所形成的固溶体。 影响置换固溶体固溶度的因素:原子尺寸,电负性,电子浓度,晶体结构 何谓柏氏矢量? 答:柏氏矢量:不但可以表示位错的性质,而且可以表示晶格畸变的大小和方向,从而使人们在研究位错时能够摆脱位错区域内原子排列具体细节的约束 1、名词解释: 过冷现象:结晶时,实际结晶温度低于理论结晶温度的现象。在一定压力下,当液体的 温度已低于该压力下液体的凝固点,而液体仍不凝固的现象叫液体的过冷现象 结构起伏液态金属中近程有序的原子集团处于瞬间出现、瞬间消失、此起彼伏、变化不定 的状态之中,仿佛在液态金属中不断涌现出一些极微小的固态结构一样。这种不断变化的近 程有序原子集团成为结构起伏。 能量起伏液态金属中处于热运动的原子能量有高有低,同一原子的能量也在随时间不停地 变化,时高时低的现象。 2、根据结晶的热力学条件解释。为什么金属结晶时一定要有过冷度?冷却速度与过冷度有什么关系? 答:由热力学第二定律知道,在等温等压条件下,一切自发过程都朝着使系统自由能降低的方向进行。液态金属要结晶,其结晶温度一定要低于理论结晶温度Tm,此时的固态金属自由能低于液态金属的自由能,两相自由能之差构成了金属结晶的驱动力。要获得结晶过程所必须的驱动力,一定要使实际结晶温度低于理论结晶温度,这样才能满足结晶的热力学条件。过冷度越大,液、固两相自由能的差值越大,即相变驱动力越大,结晶速度越快,所以金属结晶必须有过冷度。冷却速度越大,过冷度越大;反之,冷却速度越小,则过冷度越小. 12、常温下晶粒大小对金属性能有何影响?根据凝固理论,试述细化晶粒的方法有哪些?答:金属的晶粒越细小,强度和硬度则越高,同时塑性韧性也越好。 细化晶粒的方法: 1)控制过冷度,在一般金属结晶时的过冷度范围内,过冷度越大,晶粒越细小;2)变质处理,在浇注前往液态金属中加入形核剂,促进形成大量的非均匀晶核来细化晶粒;3)振动、搅动,对即将凝固的金属进行振动或搅动,一方面是依靠从外面输入能量促使晶核提前形成,另一方面是使成长中的枝晶破碎,使晶核数目增加. 3、何谓枝晶偏析?是如何形成的?影响因素有哪些?对金属性能有何影响,如何消除? 2)答:枝晶偏析:在一个晶粒内部化学成分不均匀的现象称为晶内偏析,由于固溶体晶体通常是树枝状,枝干,枝间的化学成分不同,所以之为枝晶偏析。形成原因:固溶体合金平衡结晶的结果,使前后从液相中结晶出的固相成分不同,再加上冷却较快,不能使成分扩散均匀,结果就使每个晶粒内部的化学成分很不均匀,先结晶的含高熔点组元多,后结晶的含低熔点组元多,再结晶内部存在浓
《机器人技术》大作业 (2015年秋季学期) 题目消防机器人发展与应用 姓名 学号 班级 专业机械设计制造及其自动化 报告提交日期2015.12.04 哈尔滨工业大学
内容及要求 1.以某种机器人(如搬运、焊接、喷漆、装配等工业机器人;服务机 器人;仿生鱼、蛇等仿生机器人;军用及其它机器人等)为例,撰写一篇大作业,题目自拟,以下内容仅作参考: 1) 机器人的机械结构设计(包括各部分名称、功能、传动等); 2) 机器人的运动学及动力学分析; 3) 机器人的控制及轨迹规划; 4) 驱动及伺服系统设计; 5) 电气控制电路图及部分控制子程序。 2.题目自拟,拒绝雷同和抄袭; 3.参考文献不少于7篇,其中至少有2篇外文文献; 4.报告统一用该模板撰写,字数不少于5000字,上限不限; 5.正文为小四号宋体,1.25倍行距;图表规范,标注为五号宋体; 6.用A4纸单面打印;左侧装订,1枚钉; 7.提交打印稿及03版word电子文档,由班长收齐。 8.此页不得删除。 评语: 成绩(20分):教师签名: 年月日
消防机器人发展与应用 一、我国消防机器人的市场需求 近年来,我国石油化工等行业有了飞速的发展和进步,生产过程中的易燃易爆和剧毒化学制品急剧增长,由于设备以及管理等方面的原因,导致化学危险品和放射性物质泄漏以及燃烧、爆炸的事故隐患越来越多。一旦事故发生,假如没有有效的方法、装备及设施,救援人员将无法进入事故现场要冒然采取行动,往往只会造成无辜生命的牺牲出惨重代价,结果仍不能达到预期目的,这方面各地消防及救援部门已有许多次血的教训。深圳清水河大爆炸、南京金陵石化火灾、北京东方化工厂罐区火灾等事件发生后,全国各地要求配备消防机器人的呼声愈来愈高。尤其是在明确公安消防部队作为处置各类化学危险品泄漏事故的主力军之后,在我国消防部门配备消防机器人的问题就显得更为迫切了。 二、国外消防机器人发展现状 国际上较早开展消防机器人研究的是美国和苏联,稍后,英国、日本、法国、德国等国家也纷纷开始研究该类技术。目前已有很多种不同功能的消防机器人用于救灾现场。日本投入应用的消防机器人最多。80年代,日本研制了不少于5种型号的自动行驶灭火机器人,分别配备于大阪、东京、高石、太田、蒲田等消防部门,这类机器人以内燃机或电动机作为动力,配置驱动轮或履带式行驶机构,能爬坡、越障碍;装有较大喷射流量的消防枪炮,能作俯仰和左右回转;装有气体检测仪器和电视监视设备;通过电缆或无线控制,控制距离最大为100m。另一类机器人为侦察、抢险机器人,除装有气体检测仪器和电视监视器设备外,还装有机械手,能通过遥控处理危险物品。 美国已研制出能依靠感觉信息控制的救灾智能化机器人,如1994年用于探测阿拉斯加州斯拍活火山的“但丁2号”,抓获杀人犯的RM 1一9型遥控消防机器人等。亚利桑那州消防部门研制的消防机器人,装有破拆工具和消防水枪,能一边破拆,一边喷射灭火。 英国智能化保安公司生产的RO一VEH遥控消防车已装备于中部和西部消防部门,配置为履带式或轮式行驶机构,能爬楼梯,通过电缆供电或自携蓄电池供电。装有消防水炮、摄像机或热像仪。采用有线控制方式。1985年英国中西部消防部门和Firma SAS公司联合研制的机器人消防车,用HunterIII汽车改装而成,装有双臂、水枪、探测器(温度、化学物质、辐射等)、工业电视摄像机、红外线装置。机械手用来启闭阀门、搬移物品或开门等。 国际上对消防机器人的研究可分为三个阶段(三代),第一代是程序控制消防
题目: 根据已知位移曲线,求速度曲线 要求: ? 由数据文件画出位移曲线( Δt=0.0005s ); ? 对位移数据不作处理,算出速度并画出速度曲线; ? 对位移数据进行处理,画出位移曲线,并与原位移曲线对比; ? 画出由处理后的位移数据算出的速度曲线; ? 写出相应的处理过程及分析。 1. 由数据文件画出位移曲线( Δt=0.0005s ); MATLAB 程序: data=importdata('dat2.dat'); x=(0.0005:0.0005:55); y=data'; plot(x,y); xlabel('时间/s'); ylabel('位移/mm'); title('原始位移曲线'); 曲线如图: 图1 原始位移曲线 2. 对位移数据不作处理,算出速度并画出速度曲线; MATLAB 程序: clear; data=importdata('dat2.dat'); t X V ??=
x=(0.0005:0.0005:55); y=data'; dt=0.0005; for i=1:109999 dx=y(i+1)-y(i); v(i)=dx/dt; end v(110000)=0; plot(x,v); 速度曲线: 图2 原始速度曲线 3.对位移数据进行处理,画出位移曲线,并与原位移曲线对比; 先对位移信号进行快速傅里叶变换: MATLAB程序:fft(y) 结果如图: 图3 原始位移曲线FFT变换
可以得知:频率在0附近为有用的位移信号,而频率大于0HZ的信号则为干扰信号,被滤去。 MATLAB程序: data=importdata('dat2.dat'); x=0.0005:0.0005:55; y=data'; wp=1/1000;ws=4/1000; [n,Wn]=buttord(wp,ws,0.7,20); %使用buttord函数求出阶数n,截止频率Wn。 [b,a]=butter(n,Wn); %使用butter函数求出滤波系数。 y2=filter(b,a,y); plot(x,y2); 曲线如图: 图4 滤波后位移曲线 与原位移曲线对比如下图: 图5 滤波后位移曲线与原曲线对比
第一章 1?作图表示出立方晶系(1 2 3)、(0 -1-2)、(4 2 1)等晶面和[-1 0 2]、 今有一晶面在X、Y、Z坐标轴上的截距分别是5个原子间距,2个原子间距和3个原子间距,求该晶面的晶面参数。 解:设X方向的截距为5a, Y方向的截距为2a,则Z方向截距为3c=3X2a/3=2a,取截距的倒数,分别为 1/5a,1/2a, 1/2a 化为最小简单整数分别为2,5,5 故该晶面的晶面指数为(2 5 5) 4体心立方晶格的晶格常数为a,试求出(1 0 0)、(1 1 0)、(1 1 1) 晶面的晶面间距,并指出面间距最大的晶面 3?某晶体的原子位于正方晶格的节点上,其晶格常数
解:(1 0 0)面间距为a/2, (1 1 0)面间距为"2a/2, (1 1 1)面间距为"3a/3 三个晶面晶面中面间距最大的晶面为(1 1 0) 7证明理想密排六方晶胞中的轴比c/a=1.633 证明:理想密排六方晶格配位数为12,即晶胞上底面中心原子 与其下面的3个位于晶胞内的原子相切,成正四面体,如图所示 贝卩OD=c/2,AB=BC=CA=CD=a 因厶ABC是等边三角形,所以有OC=2/3CE 由于(BC)2=(CE)2+(BE)2 有(CD)2=(OC)2+(1/2C)2,即 I /T J (CU)(c)2- ' 3 2 因此c/a=V8/3=1.633 8?试证明面心立方晶格的八面体间隙半径为r=0.414R 解:面心立方八面体间隙半径r=a/2-v2a/4=0.146a
面心立方原子半径R二辺a/4,贝卩a=4R/\2,代入上式有 R=0.146X4R/ V2=0.414R 9. a )设有一刚球模型,球的直径不变,当由面心立方晶格转变为体心立方晶格时,试计算其体积膨胀。b)经X射线测定,在912C时丫-Fe的晶格常数为0.3633nm, a -Fe的晶格常数为0.2892nm,当由丫-Fe转化为a -Fe时,求其体积膨胀,并与a)比较,说明其差别的原因。 解:a)令面心立方晶格与体心立方晶格的体积及晶格常数分别 为V面、V踢与a面、a体,钢球的半径为r,由晶体结构可知,对于面心晶胞有 4r=辺a 面,a 面=2辺/2r, V 面二(a 面)3= (2辺r)3 对于体心晶胞有 4r= \3a 体,a 体=4v3/3r, V 体二(a 体)3= (4\3/3r)3 则由面心立方晶胞转变为体心立方晶胞的体积膨胀厶V为 △V=2X V体-V 面=2.01r3 B)按照晶格常数计算实际转变体积膨胀厶V实,有 △V实=2^ V体-V 面=2x(0.2892)3-(0.3633)3=0.000425nm3 实际体积膨胀小于理论体积膨胀的原因在于由丫-Fe转化为a -Fe时,Fe原子的半径发生了变化,原子半径减小了。 10. 已知铁和铜在室温下的晶格常数分别为0.286nm和0.3607nm,求
第一章绪论 1. 机器人学(Robotics)它包括有基础研究和应用研究两个方面,主要研究内容有:(1) 机械手设计;(2) 机器人运动学、动力学和控制;(3) 轨迹设计和路径规划;(4) 传感器(包括内部传感器和外部传感器);(5) 机器人视觉;(6) 机器人语言;(7) 装置与系统结构;(8) 机器人智能等。 2. 机器人学三原则:(1)机器人不得伤害人(2)机器人应执行人们的命令,除非这些命令与第一原则相矛盾(3)机器人应能保护自己的生存,只要这种保护行为不与第一第二原则相矛盾。 3. 6种型式的机器人: (1) 手动操纵器:人操纵的机械手,缺乏独立性; (2) 固定程序机器人:缺乏通用性; (3) 可编程机器人:非伺服控制; (4) 示教再现机器人:通用工业机器人; (5) 数控机器人:由计算机控制的机器人; (6) 智能机器人:具有智能行为的自律型机器人。 4. 按以下特征来描述机器人: (1)机器人的动作机构具有类似于人或其他生物体某些器官 ( 如肢体、感官等 ) 的功能; (2)机器人具有通用性,工作种类多样,动作程序灵活易变,是柔性加工主要组成部分; (3)机器人具有不同程度的智能,如记忆、感知、推理、决策、学习等;(4)机器人具有独立性,完整的机器人系统,在工作中可以不依赖于人的干预。 5. 机器人主要由执行机构、驱动和传动装置、传感器和控制器四大部分构成 6. 控制方式主要有示教再现、可编程控制、遥控和自主控制等多种方式。 7. 示教-再现即分为示教-存储-再现-操作四步进行。 8. 控制信息顺序信息:位置信息:时间信息: 9. 位置控制点位控制-PTP(Point to Point): 连续路径控制-CP(Continuous Path): 10. 操纵机器人可分为两种类型:能力扩大式机器人:遥控机器人: 11. 第三代智能机器人应具备以下四种机能:运动机能感知机能: 思维能力:人-机对话机能: 智能机器人是一种“认知-适应"的工作方式。 12.目前我国机器人的发展正朝着实用化、智能化和特种机器人的方向发展。
实验一: 用FFT 作谱分析 实验目的: (1) 进一步加深DFT 算法原理和基本性质的理解(因为FFT 只是DFT 的一种快速算法, 所以FFT 的运算结果必然满足DFT 的基本性质)。 (2) 熟悉FFT 算法原理和FFT 子程序的应用。 (3) 学习用FFT 对连续信号和时域离散信号进行谱分析的方法,了解可能出现的分析误差及其原因,以便在实际中正确应用FFT 。 实验原理: DFT 的运算量: 一次完整的DFT 运算总共需要2N 次复数乘法和(1)N N -复数加法运算,因而 直接计算DFT 时,乘法次数和加法次数都和2N 成正比,当N 很大时,运算量很客观的。例如,当N=8时,DFT 运算需64位复数乘法,当N=1024时,DFT 运算需1048576次复数乘法。而N 的取值可能会很大,因而寻找运算量的途径是很必要的。 FFT 算法原理: 大多数减少离散傅里叶变换运算次数的方法都是基于nk N W 的对称性和周期 性。 (1)对称性 ()*()k N n kn kn N N N W W W --==
(2)周期性 ()(mod`)()()kn N kn n N k n k N N N N N W W W W ++=== 由此可得 ()()/2 (/2)1 n N k N n k nk N N N N N k N k N N W W W W W W ---+?==?=-??=-? 这样: 1.利用第三个方程的这些特性,DFT 运算中有些项可以合并; 2.利用nk N W 的对称性和周期性,可以将长序列的DFT 分解为短序列的DFT 。 前面已经说过,DFT 的运算量是与2N 成正比的,所以N 越小对计算越有利, 因而小点数序列的DFT 比大点数序列的DFT 运算量要小。 快速傅里叶变换算法正是基于这样的基本思路而发展起来的,她的算法基本 上可分成两大类,即按时间抽取法和按频率抽取法。 我们最常用的是2M N =的情况,该情况下的变换成为基2快速傅里叶变换。 完成一次完整的FFT 计算总共需要 2log 2 N N 次复数乘法运算和2log N N 次复数加法运算。很明显,N 越大,FFT 的优点就越突出。 实验步骤 (1) 复习DFT 的定义、 性质和用DFT 作谱分析的有关内容。 (2) 复习FFT 算法原理与编程思想, 并对照DIT-FFT 运算流图和程序框图, 读懂本实验提供的FFT 子程序。 (3) 编制信号产生子程序, 产生以下典型信号供谱分析用:
第2页 共 4页 y 1(t); 4. 写出描述该系统的系统方程。 四、(12分) 设一因果连续时间LTI 系统输入x (t)和输出y (t)关系为: y ''(t)+3y '(t)+2y (t)=x (t) 1. 求该系统的系统函数H (s),画出其零极点图,并判别系统的稳定性; 2. 确定此系统的冲激响应h (t); 3. 求系统的幅频特性与相频特性表达式。 五、(8分) 一个离散LTI 系统的单位样值响应为:h (n )=αn u (n ) 1. 试用时域卷积方法求该系统的单位阶跃响应g(n ); 2. 确定该系统的系统方程。 六、(24分) 已知函数x (t)和y (t)分别为: ∑∞ -∞ =-= n n t t x )4()(δ ,t t t y 6sin 4cos )(+= 1. 求y (t)的指数傅立叶级数表示,说明其频带宽度; 2. 求x (t)的傅立叶级数展开表达式,简略画出其幅度谱线图; 3. 求x (t)的傅立叶变换表达式X (j ω),简略画出X (j ω); 4. 求y (t)的傅立叶变换表达式Y (j ω),简略画出Y (j ω); 5. 确定信号y (t)的奈奎斯特频率与奈奎斯特间隔。 6. 确定信号s (t)=x (t)y (t)的频谱。 七、(16分) 一个因果的离散时间LTI 系统描述如下: )()2(2 1 )1(43)(n x n y n y n y =-+-- 其中x (n)为输入,y (n)为输出。 1. 试求该系统的系统函数H (z),画出H (z)的零、极点图; 2. 求系统的单位样值响应h (n),并说明系统的稳定性; 3. 用求和器、数乘器和延时器画出其结构框图; 4. 如)(31)(,1)2(,2)1(n u n x y y n ?? ? ??==-=-,求y (n)。
招标投标企业报告哈工大机器人智能制造有限公司
本报告于 2019年9月24日 生成 您所看到的报告内容为截至该时间点该公司的数据快照 目录 1. 基本信息:工商信息 2. 招投标情况:中标/投标数量、中标/投标情况、中标/投标行业分布、参与投标 的甲方排名、合作甲方排名 3. 股东及出资信息 4. 风险信息:经营异常、股权出资、动产抵押、税务信息、行政处罚 5. 企业信息:工程人员、企业资质 * 敬启者:本报告内容是中国比地招标网接收您的委托,查询公开信息所得结果。中国比地招标网不对该查询结果的全面、准确、真实性负责。本报告应仅为您的决策提供参考。
一、基本信息 1. 工商信息 企业名称:哈工大机器人智能制造有限公司统一社会信用代码:91430600MA4PNLMQ22工商注册号:/组织机构代码:MA4PNLMQ2 法定代表人:梁先仁成立日期:2018-06-28 企业类型:其他有限责任公司经营状态:存续 注册资本:5000万人民币 注册地址:湖南城陵矶新港区云港路欣登孵化器办公楼3楼 营业期限:2018-06-28 至 2048-06-27 营业范围:机器人技术咨询,机器人开发,机器人零配件组装,机器人零配件、专用设备的销售,机械技术开发服务,机械技术咨询、交流服务,计算机技术开发、技术服务,自动识别和标识系统开发及应用,电子、通信与自动控制技术研发,节能技术开发服务、咨询、交流服务、转让服务,工业机器人、具有独立功能专用机械、工业自动控制系统装置、物料搬运设备、海洋工程专用设备、冶金专用设备、航空、航天器及设备、船用配套设备的制造,金属切割及焊接设备制造,激光器件制造,光电子产品制造,自营和代理各类商品及技术的进出口(国家限制经营或禁止进出口的商品和技术除外)。(依法须经批准的项目,经相关部门批准后方可开展经营活动) 联系电话:*********** 二、招投标分析 2.1 中标/投标数量 企业中标/投标数: 个 (数据统计时间:2017年至报告生成时间) 7
机器人技术课程作业——PUMA机器人 如上图所示的PUMA机器人,要求实现右图所示的运动,求解: ①建立坐标系; ②给出D-H参数表; ③推导正运动学、逆运动学; ④编程得出工作空间。 解: ①建立坐标系 a、建立原始坐标系
b、坐标系简化 ②给出D-H参数表 a、PUMA机器人的杆件参数 d0.6604m,1 d 0.14909m, 2 d 0.43307m, 4 d 0.05625m 6 a 0.4318m,a3 0.02032m 2 b、D-H参数表 关节i i i L i d i 运动范围 1 90 0 0 0 -160 o~160o o o 2 0 -90 0 d2 0.14909m -225 ~45 3 -90 0 a2 0.4318m 0 -45 o ~225o 4 0 -90 a3 0.02032m d4 0.43307m -110 o ~170o 5 0 90 0 0 -100 o ~100o 6 0 -90 0 d6 0.05625m -266 o ~266o
③推导正运动学、逆运动学 a、正运动学推导 c s0a i i i 1 由式i1 T i s c c c s d s i i1i i1i1i i1 s s c s c d c i i1i i1i1i i1 可得:0001 c s 1100c s 22 00c s0a 332 0 T 1s c 00 11 0010 1 T 2 001 d 2 s c 22 00 2 T 3 s c 00 33 0010 000100010001 c s0a 443 c s 55 00c s 66 00 3 T 4001 d 4 s c 44 00 4 T 5 0010 s c 55 005T 6 0010 s c 66 00 000100010001 由0012345 T T T T T T T,得机械手变换矩阵: 6123456 n o a p x x x x 0 T 6n o a p y y y y n o a p z z z z 0001 n c(c c c c s s c)s c s c c c s s s c s x236541641236516541641 n c(c c c s s s s)s c s s c c s c s c c y236541641236516541641 n s(c c c s s)c c s z23654642365 o c(s c c c c s c)s s s c s c s s c c s x236541641236516541641 o c(s c c s c s s)s s s s s s c c c c c y236541641236516451641 o s(s c c s s)c c s z23654642365 a c s c c s c c s s s x235412351541 a c s c s s c s s s c y235412351541 a c c s s c z2352354
金属学与热处理课后答案 第一章 填表: 晶格类型原子 数 原子半径配位数致密 度 体心立方2 a 4 3 8 68% 面心立方4 a 4 2 12 74% 密排六方6 a 2 1 12 74% 5、作图表示出立方晶系(1 2 3)、(0 -1 -2)、(4 2 1)等晶面和[-1 0 2]、[-2 1 1]、[3 4 6] 等晶向 10、已知面心立方晶格常数为a,分别计算(100)、(110)、和(111)晶面的晶面间距;并求出【100】、【110】和【111】晶向上的原子排列密度(某晶向上的原子排列密度是指该晶向上单位长度排列原子的个数) 答:(100): (110):
(111): 14、何谓组元?何谓相?何谓固溶体?固溶体的晶体结构有何特点?何谓置换固溶体?影响其固溶度的因素有哪些? 答: 组元:组成合金最基本的、独立的物质。 相:合金中结构相同、成分和性能均一并以界面相互分开的组成部分。 固溶体:合金组元之间以不同的比例相互混合形成的晶体结构与某一组元相同的固相。 固溶体的晶体结构特点:固溶体仍保持着溶剂的晶格类型,但结构发生了变化,主要包括以下几个方面:1)有晶格畸变,2)有偏聚与有序,3)当低于某一温度时,可使具有短程有序的固溶体的溶质和溶剂原子在整个晶体中都按—定的顺序排列起来,转变为长程有序,形成有序固溶体。 置换固溶体:溶质原子位于溶剂晶格的某些结点位置所形成的固溶体。 影响置换固溶体固溶度的因素:原子尺寸,电负性,电子浓度,晶体结构 15、何谓固溶强化?置换固溶体和间隙固溶体的强化效果哪个大?为什么? 答:固溶强化:在固溶体中,随着溶质浓度的增加,固溶体的强度、硬度提高,而塑性、韧性有所下降的现象。间隙固溶体的强化效果大于置换固溶体的强化效果。原因:溶质原子与溶剂原子的尺寸差别越大,所引起的晶格畸变也越大,强化效果越好。间隙固溶体晶格畸变大于置换固溶体的晶格畸变 16、何谓间隙相?它与间隙固溶体及复杂晶格间隙化合物有何区别? 答:间隙相:当非金属原子半径与金属原子半径的比值小于0.59时,形成的简单的晶体结构称为间隙相。间隙相与间隙固溶体有本质的区别,间隙相是一种化合物,它具有与其组元完全不同的晶格结构,而间隙固溶体则任保持着溶剂组元的晶格类型。间隙相与间隙化合物相比具有比较简单的晶体结构,间隙相一般比间隙化合物硬度更高,更稳定。 21、何谓刃型位错和螺型位错?定性说明刃型位错的弹性应力场与异类原子的相互作用,对金属力学性能有何影响? 答:刃型位错:设有一简单立方晶体,某一原子面在晶体内部中断,这个原子平面中断处的边缘就是一个刃型位错,犹如一把锋利的钢刀将晶体上半部分切开,沿切口硬入一额外半原子面一样,将刃口处的原子列为刃型位错线。螺型位错:一个晶体的某一部分相对于其余部分发生滑移,原子平面沿着一根轴线盘旋上升,每绕轴线一周,原子面上升一个晶面间距。在中央轴线处即为一螺型位错。 刃型位错的应力场可以与间隙原子核置换原子发生弹性交互作用,各种间隙及尺寸较大的置换原子,聚集于正刃型位错的下半部分,或者负刃型位错的上半部分;对于较小的置换原子来说,则易于聚集于刃型位错的另一半受压应力的地反。所以刃型位错往往携带大量的溶质原子,形成所谓的“柯氏气团”。这样一来,就会使位错的晶格畸变降低,同时使位错难于运动,从而造成金属的强化。 23何谓柏氏矢量?用柏氏矢量判断图中所示的位错环中A、B、C、D、E五段位错各属于哪一类位错? 答:柏氏矢量:不但可以表示位错的性质,而且可以表示晶格畸变的大小和方向,从而使人们在研究位错时能够摆脱位错区域内原子排列具体细节的约束。A是右螺旋型位错、B左螺旋型位错、C