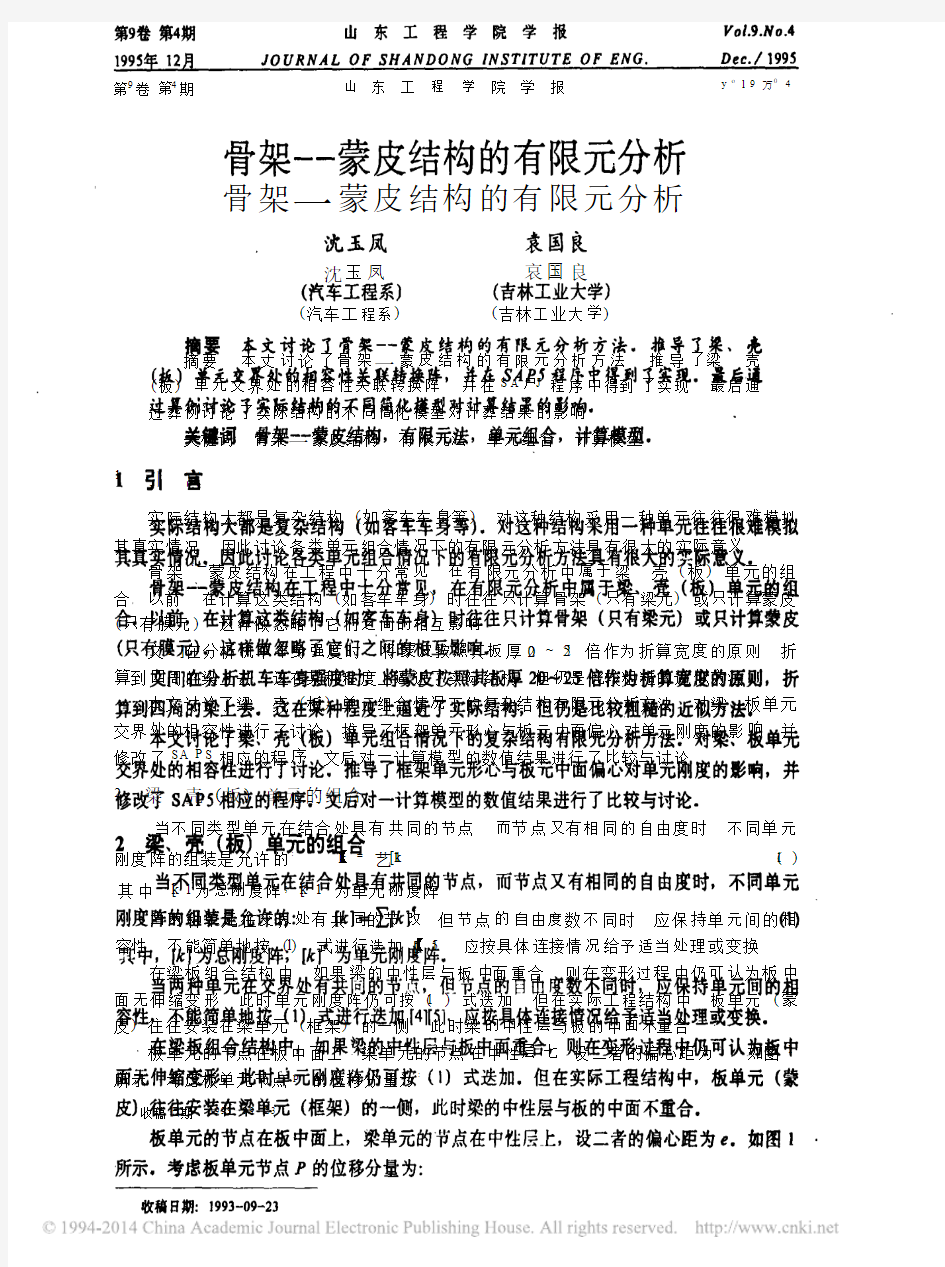
汽车起重机构造与原理 一、汽车起重机基本术语 1、汽车起重机 起重作业部分安装在专用或通用汽车底盘上的起重机。参见图一 2、整机。 具有齐全的上车、下车及附属装置的起重机。 3、上车(起重机部分) 包括回转支承及其以上的全部机构的总和。 4、下车(运载车部分) 回转支承以下部分,包括底架、底盘、支腿等各部件、机构和装置的统称。(包括支腿在内的装载上车而行走的运载车)。 5、起重性能参数(参见表一) 5.1起重量:起吊物体的质量。 5.2总起重量:起吊物体的质量与取物装置质量之和。 5.3额定总起重量 起重机在各种工况和规定的使用条件下所允许起吊的最大总起重量。(工况,指不同的臂长和仰角;规定的使用条件,如打支腿、地面的平整度、风力、设备状况等规定的使用条件) 5.4最大额定总起重量 起重机用基本臂处于最小额定幅度,用支腿进行作业所允许的额定总起重量,并以此作为起重机的名义起重量。 6、幅度(参见图二、图三) 6.1幅度:起重机空钩时,回转中心垂线与吊钩中心之间的水平距离。 6.2工作幅度:起重作业时,回转中心垂线与吊钩中心之间的水平距离。 6.3最小工作幅度:起重机处于最大仰角时的工作幅度。 6.4额定幅度:某一额定总起重量所允许的最大工作幅度。 6.5最小额定幅度:最大额定总起重量所允许的最大工作幅度。 7、起重力矩:总起重量与相应的工作幅度的乘积。 8、起升高度:起重机起升到最高位置时,起重钩钩口中心到支承地面的距离。 9、倍率:动滑轮组的承载钢丝绳数与引入卷筒的钢丝绳数之比。 10、起升速度:平稳运动时,起吊物体的垂直位移速度。 10.1单绳速度:动力装置在额定转速下,在卷筒计算直径处第n层的钢丝绳速度。 10.2起重钩的起升(下降)速度 钢丝绳单绳速度除以起升滑轮组倍率得到的值。 11、变幅时间(速度) 变幅作业时,幅度从最大(最小)变到最小(最大)所用的时间。 12、最大回转速度 空载状态下,基本臂在最大仰角时,所能达到的最快回转速度。 13、起重臂伸(缩)时间(速度) 空载状态下,起重臂处于最大仰角,使吊臂由全缩(伸)状态运动到全伸(缩)状态所用的时间。 14、支腿收放时间(速度) 支腿以全收(放)状态,运动到全放(收)状态所用的时间。 15、仰角:(参见图二、图三) 在起升平面内,起重臂纵向中心线与水平线的夹角。 16、副臂安装角:(参见图二、图三) 起重机主臂轴线与副臂轴线在起升平面内的夹角。 17、起重臂长: 沿起重臂轴线方向,其根部销轴中心到头部定滑轮组中心的轴线距离。 18、起重特性曲线: 表示起重机作业性能的曲线。 18.1起重量特性曲线(参见表一) 在以总起重量和工作幅度为坐标轴的直角坐标系中,以一定臂长在不同工作幅度时的额定起重量为坐标点编制的曲线。
质量技术监督研究 Quality and Technical Supervision Research 2012年第3期(总第21期) NO.3.2012General No.21 基于有限元法的门座起重机结构强度分析 黄文翰 (福建省特种设备检验研究院,福建 福州 350008) 摘要:采用有限元分析软件ANSYS对门座式起重机建立整体结构计算分析有限元模型,进行了两种危险工况下 的应力计算,并通过将有限元计算结果与实测应力结果进行比较,验证了有限元计算结果的可靠性,为门座式起重机的强度分析提供了可行的有限元参考方法。 关键词:门座式起重机;有限元;强度分析 随着贸易经济高速发展和港口货物吞吐量不断增长,门座起重机由于其良好的工作性能和通用性,成为港口装卸作业不可缺少的重要设备。门座起重机的整体金属结构作为主要的承载部件,由于其露天、腐蚀性的工作环境以及较高的使用频率和工作强度,易产生疲劳裂纹、腐蚀等缺陷,影响结构强度和刚度等力学性能,并危及起重机使用安全。因此,分析门座起重机的金属结构强度并为生产和维修提供依据,具有十分重要的意义。传统的门座起重机结构分析多采用力学计算方法,由于其设计变量较多,受力复杂,因此计算量大且较多采用经验简化或估算,势必影响计算结果的准确性。有限元分析方法具有建模方便快捷、计算结果准确的突出优点,日益成为起重机结构强度分析广泛使用的分析方法[1]。 1 SDMQ1260/60E型门座起重机概况 本文分析的SDMQ1260/60E门座起重机由某水工 机械厂1990年制造安装,用于某电站建设施工,1998年起移至某造船厂用于造船用部件和材料的吊运。该起重机自重约377t(含压重56t),结构大体可分为上部旋转部分和下部运行部分(见图1),旋转部分包括臂架系统(由象鼻梁、吊臂、大拉杆、小拉杆、变幅拉杆等组成)、人字架、平衡重、转柱、转台等,通过起升、变幅、旋转运动实现在环形圆柱体空间升降物品;运行部分主要是由门架和运行台车组成[2]。其中转柱、门架和臂架系统是门座起重机最重要的承载构件。 图1 门座式起重机结构简图 收稿日期:2012-05-09 基金项目:本文工作受国家质检总局科技计划项目(编号:2010QK048)资助 作者简介:黄文翰,男,福建省特种设备检验研究院宁德分院副院长,工程师,检验师,硕士 DOI:10.15902/https://www.doczj.com/doc/7910054385.html,ki.zljsjdyj.2012.03.012
汽车起重机转台的有限元分析及优化 摘要:汽车起重机的转台是用来安装吊臂、起升机构、变幅机构、回转机构、上车发动机、司机室、液压阀组及管路等的机架。转台通过回转支承安装在起重机的车架上,为了保证起重机的正常工作,转台应具有足够的刚度和强度。对于汽车起重机,为了有较好的通过性和较低的成本,应尽量减小转台的外形尺寸及重量。 随着计算机辅助工程(CAE)技术在工业应用领域中的广度和深度的不断发展,它在提高产品设计质量、缩短设计周期、节约成本方面发挥了越来越重要的作用。目前CAE分析的对象已由单一的零部件分析拓展到系统级的装配体,如挖掘机、汽车起重机等整机的仿真,而且,CAE分析不再仅仅是专职分析人员的工作,设计人员参与CAE分析已经成为必然。 关键词:汽车起重机;转台;有限元分析 1.引言 1.汽车起重机转台作为起重机三大结构件之一,负责起重机上车和底盘之间力 的传递。在现今高强板大量使用的情况下,如何简化结构、减少重量是起重机设计的难题之一。经典ANSYS有限元分析界面是用板壳单元在ANSYS里面建模并进行计算,但是存在建模过于复杂,难以修改,模型无法导出的问题,属于验证性计算,而使用ANSYS Workbench Enviroment(AWE)则可以用PRO/E 软件建立模型,再导入AWE进行计算,且在PRO/E中修改模型后再次导入可以保留之前设置的边界条件,设计效率成倍提高。 ANSYS Workbench Enviroment(AWE)作为新一代多物理场协同CAE仿真环境,其独特的产品构架和众多支承性产品模块为整机、多场耦合分析提供了非常优秀的系统级解决方案。具体来讲,AWE具有的主要特色如下: 1.强大的装配体自动分析功能
飞机结构详细讲解 2006年12月18日星期一上午 02:25 机翼 机翼是飞机的重要部件之一,安装在机身 上。其最主要作用是产生升力,同时也可以 在机翼内布置弹药仓和油箱,在飞行中可以 收藏起落架。另外,在机翼上还安装有改善 起飞和着陆性能的襟翼和用于飞机横向操 纵的副翼,有的还在机翼前缘装有缝翼等增 加升力的装置。 由于飞机是在空中飞行的,因此和一般的运输工具和机械相比,就有很大的不同。飞机的各个组成部分要求在能够满足结构强度和刚度的情况下尽可能轻,机翼自然也不例外,加之机翼是产生升力的主要部件,而且许多飞机的发动机也安装在机翼上或机翼下,因此所承受的载荷就更大,这就需要机翼有很好的结构强度以承受这巨大的载荷,同时也要有很大的刚度保证机翼在巨大载荷的作用下不会过分变形。 机翼的基本受力构件包括纵向骨架、横向骨架、蒙皮和接头。其中接头的作用是将机翼上的载荷传递到机身上,而有些飞机整个就是一个大的飞翼,如B2隐形轰炸机则根本就没有接头。以下是典型的梁式机翼的结构。 一、纵向骨架机翼的纵向骨架由翼梁、纵 樯和桁条等组成,所谓纵向是指沿翼展方 向,它们都是沿翼展方向布置的。 * 翼梁是最主要的纵向构件,它 承受全部或大部分弯矩和剪力。翼梁一般由 凸缘、腹板和支柱构成(如图所示)。凸缘 通常由锻造铝合金或高强度合金钢制成,腹 板用硬铝合金板材制成,与上下凸缘用螺钉 或铆钉相连接。凸缘和腹板组成工字型梁, 承受由外载荷转化而成的弯矩和剪力。 * 纵樯与翼梁十分相像,二者的区别在于纵 樯的凸缘很弱并且不与机身相连,其长度有 时仅为翼展的一部分。纵樯通常布置在机翼 的前后缘部分,与上下蒙皮相连,形成封闭 盒段,承受扭矩。靠后缘的纵樯还可以悬挂 襟翼和副翼。 * 桁条是用铝合金挤压或板材弯制而成,铆接在蒙皮内表面,支持蒙皮以提高其承载能
汽车防撞梁的受力及优化分析 班级: 学号: 姓名:
一.前言 汽车前后端所装有的保险梁,其重要之处在于可以在冲撞时吸收能量并保护车身和车内成员安全。早先汽车的防撞钢梁以金属材料为主,用厚度为3毫米以上的钢板冲压成U形槽钢,表面处理镀铬,与车架纵梁铆接或焊接在一起,看上去十分不美观。近年来家用车的保险杠主要由加强壳体,吸能材料和加强横梁组成。 fig. 1 保险杠结构 fig. 2 实物图解 由上图可见,在发生高速碰撞时,能起到最大保护作用的是最后一层的防撞钢梁,防撞钢梁大多数由轻质铝合金或钢材制成。目前防撞钢梁的结构有如下横截面。 fig. 3 大多数防撞梁所采取的结构 fig. 4分析中所采取的结构 一.建立模型并求解 1.先按照图4的横截面绘制防撞梁的三维模型。
fig. 5 防撞梁三维模型 2.用import命令将其导入到workbench中,选择材料并设置材料属性,本次分析中采用铝合金。弹性模量E=71Gpa,泊松比为0.3 3. fig. 6 材料属性 3.划分网格,由于三维模型尺寸与实际尺寸相符,为保证求解速度,故网格 单元大小设为5mm,结果如图7所示。 fig. 7 网格划分
4.设置边界条件,如图8所示,在保险梁和车身骨架连接处设置fixed support ,并在正面设置50吨的力,保持和实际撞击情况相符。 fig. 8 边界条件设置 5.求解结果。 从图9和图10可以看出,铝合金梁是可以承受的住50吨的冲击力,梁的变形量最大有19.857mm ,最大应力4751.8Mpa ,还不至发生破坏。 二. 结构优化 fig. 9变形云图 fig. 10 应力云图
1 引言 近年来,国内在门座起重机设计和制造上,已有很大的提高。但在现代的港口中,还有很多服役达十多年的门座式起重机仍承担着港口繁重的吊装业务。在门座式起重机进行生产作业的过程中,由于许许多多无法避免的因素使起重机出现各种破坏及故障,以至降低或失去其预定的功能。由于起重机体积大、造价高,不可能一发生故障就即时更换,因此很多起重机普遍存在严重裂纹但仍服役生产第一线,给安全生产带来了极大隐患,甚至造成严重的以至灾难性的事故,致使生产过程不能正常运行而造成巨大的经济损失。“门座起重机风险评估”的研究已成为是国内许多检验机构正在努力探讨的一个研究课题,而找出主要部件的受力最危险点和应力集中区则是这项课题研究的重要基础。 2 门座起重机的结构模型简化 由于门座起重机结构复杂,对门座起重机金属结构进行建模分析时不可能将所有因素都考虑进去,因此必须对其金属结构进行合理有效的简化,建立一个既能方便分析计算,又尽可能的与实际使用工况相符的有限元模型。基于对门座起重机结构的认识,本文主要对港口门座起重机进行了如下的假设和简化: (1)门座起重机模型是参照图纸尺寸建立的,为方便建模计算,其中一些加强筋,肋板等细部结构,在不影响分析结果的可靠性的前提下做适当的简化。 (2)鉴于门座起重机结构复杂,在建立臂架模型分析时对电机、钢丝绳、铰轴等结构做适当的简化处理。 (3)臂架上的梯子结构,均匀分布于臂架整体结构,对分析影响不大,在建模分析时不予考虑,最后采用密度补偿法来考虑其自重对臂架结构的影响。 (4)建模分析时,只考虑门座起重机结构的自重及起吊重量,不考虑风载、地震载荷等附加载荷的影响。 3 门座起重机结构参数 本文以某单位一台45t-60m港口门座起重机为研究对象,对其进行有限元建模、有限元模 门座起重机结构与力学分析 Analysns of structure and mechanics of prortale crane 张 健 (福建省特种设备检验研究院莆田分院 福建莆田 351100)摘要:如何准确高效的对门座起重机金属结构进行受力分析,进而判断疲劳裂纹等危险隐患的存在,正成为检验检测领域当前迫切需要解决的问题之一。本文以一台门座起重机的主要受力部件受力分析为例,分析计算了臂架结构、筒体和底座行走机构这三个主要受力部件在各种极限工况下最危险状况,为有限元分析计算及“门座起重机风险评估”的研究奠定了基础。 关键词:门座起重机,模型简化,危险工况,力学分析 中国分类号:TS213.4
1.Character Studio骨骼蒙皮基础教程Copy to clipboard Posted by: 雪姬儿 Posted on: 2007-12-25 13:47 Character Studio骨骼蒙皮基础教程作者:飞菲 001 骨骼蒙皮是为模型加入一个Physique(体格)修改命令后,在结合到骨骼物体上,这样模型就会遵循骨骼物体的运动,达到蒙皮的效果。蒙皮可以针对各种类型的模型,如Polygon多边型网格物体,Patch面片模型,我们使用的是多边型模型。 002 在蒙皮之前我们首先要设置这个两足步迹骨骼的结构。现在我要做的工作是对齐骨骼,就是在形体模式下进行骨骼的调节包括位置,角度和比例,让他们正好放置在对应的模型部位的中心。
003 现在调入我们要蒙皮的角色模型,这是个已经完成的男角色模型。注意现在的手脚都是分开的姿势,这是个比较好的预备姿势,利于以后的骨骼蒙皮。
004 选择男角色模型,我们准备冻结这个模型。在冻结模型之前我们要把它的冻结属性改成不是灰色的,这样有利于我们调整骨骼。如图选择这个模型,鼠标反键选择Properties(属性)把Show frozen in Gray(以灰色显示冻结对象)的勾去掉。
.Re:Character Studio骨骼蒙皮基础教程 [Re: 雪姬儿] Copy to clipboard Posted by: 雪姬儿 Posted on: 2007-12-25 13:57 006 选择Systeme(系统)>Biped(二足骨骼)按钮 8.Re:Character Studio骨骼蒙皮基础教程[Re: 雪姬儿] Copy to clipboard Posted by: 雪姬儿 Posted on: 2007-12-25 13:58 007 在Front(前)视图中在模型的两脚之间向上移动鼠标,拖动出骨骼。直到高度比例都差不多。
起重机的组成及工作原理 起重机由驱动装置、工作机构、取物装置、操纵控制系统和金属结构组成。通过对控制系统的操纵,驱动装置将动力的能量输入,转变为机械能,在传递给取物装置。取物装置将被搬运物体与起重机联系起来,通过工作机构单独或组合运动,完成物体搬运任务。可移动金属结构将各组成部分连接成一个整体,并承载起重机的自重和吊重。 起重机的组成及工作原理 图2-3起重机的工作原理 一、驱动装置 驱动装置是用来驱动工作机构的动力设备。常见的驱动设备有电力驱动、内燃机驱动和人力驱动等,电能是清洁、经济的能源,电力驱动是现代起重机的主要驱动方式。 二、工作机构 工作机构包括:起升机构、运行机构。 a)起升机构是用来实现物体的垂直升降的机构是任何起重机部可缺少的部分,因此它是起重机最主要、最基本的机构。 b)运行机构是通过起重机或起升小车来实现水平搬运物体的机构,可分为有轨运行和无轨运行。 三、取物装置 取物装置是通过吊钩将物体与起重机联系起来进行物体吊运的装置。根据被吊物体不同的种类、形态、体积大小,采用不同种类的取物装置。合适的取物装置可以减轻工作人员的劳动强度,大大提高工作效率。防止吊物坠落,保证工作人员的安全和吊物不受损伤时对取物装置安全的基本要求。 四、金属结构 金属结构是以金属材料轧制的型钢和钢板做为基本构件,通过焊接、铆接、螺栓连接等方法,按一定的组成规则连接,承受起重机的自重和载荷的钢结构。
金属结构的重量大约是整台起重机的40%-70%左右,重型起重机可达到90%;金属结构按照它的构造可分为实腹式和格构式两类,组成起重机的基本受力构件。起重机金属结构的工作特点有受力复杂、自重大、耗材多和整体可移动性。起重机的金属结构是起重机的重要组成部分,它是整台起重机的骨架,将起重机的机械和电气设备连接组合成一个有机的整体,承受和传递作用在起重机上的各种载荷并形成一定的作业空间,以便使起吊的重物搬运到指定的地点。 五、控制操纵系统 通过电气系统控制操纵起重机各机构及整机的运动,进行各种起重作业。 控制操纵系统包括各种操纵器、显示器及相关元件和线路,是人机对话的接口。该系统的状态直接影响到起重机的作业、效率和安全等。 起重机与一般的机器的显着区别是庞大、可移动的金属结构和多机构组合工作。间歇式的循环作业、起重载荷的不均匀性、各机构运动循环的不一定性、机构负载的不等时性、多人参与的配合作业的特点,又增加了起重机的复杂性、安全隐患多、危险范围大。 纽科伦(新乡)起重机有限公司
maya教程:骨骼绑定+蒙皮+动画 日期 2011年11月19日星期六发布人豆豆来源朱峰社区 我通常会确保我的模型是我喜欢的方式开始。虽然这是不是你没有做才能使一个非法的字符,这些都是我觉得帮助的步骤。你可以看到我在这种情况下,模型是对称的。向下中线边缘了,我已经沿z轴为中心的模式。我也把双脚y轴的原点。我缩放模型的大小,我想它以及。这几个步骤可以从长远来看更容易的事情。 我会开始前从臀部开始了模型中心6关节。我将作为一个规则的网格单元,当我把我从来不到位,旋转或缩放的关节在x。我只把它们翻译成地方。这确保我有一个干净的旋转和尺度,当我开始剥皮,可以很容易地重新定位,一切回0到原来的绑定构成。如果你有旋转的钻机上,当你开始剥皮,如果您需要取回绑定构成某种原因作出调整,你会知道什么样的地位这些关节原来当你第一次skinned.n。
现在不认为我只是随机决定6关节的关节。这些关节的选择,并专门放置。在中心的臀部开始,我一个联合的重心(cog)的,然后扭动的臀部之一以上,权利。下一个是躯干的扭动。上面的脖子和肩膀的基础之一。颈联,然后头部的基地,然后,我们结束在头顶。
如果这是一个更复杂的钻机,具有更为现实的脊椎和ik,我会把它scurve像一个真正的脊柱会。但由于它的fk我要保持挺直脊椎从侧面。这将使得更容易扭动身体,而动画。如果我们有一个scurve 脊柱x中,如果我们扭曲的躯干,它会扭动身体的角度,倾斜的同时回。
如果你现在看看这个关节链在前面视图,你可以看到,其跌幅为中心。现在的位置
注意保持腿直。如果腿不是腿在一条直线太多可能无法弯曲你太期望他们的方式。 下一步,而仍然在前面视图中,我们将手臂关节。锁骨,肩,肘,前臂手腕之一。
Journal of Aerospace Science and Technology 国际航空航天科学, 2019, 7(2), 23-32 Published Online June 2019 in Hans. https://www.doczj.com/doc/7910054385.html,/journal/jast https://https://www.doczj.com/doc/7910054385.html,/10.12677/jast.2019.72004 The Application of Simulation Technology on the Assembly of Heavy Launch Vehicle Riveting Cabin Dongxu Hou1, Xiao Hu1, Wei Zhang2, Yao Ma1, Lihui An3 1Capital Aerospace Machinery Company, Beijing 2Beijing Institute of Astronautically Systems Engineering, Beijing 3China Academy of Launch Vehicle Technology, Beijing Received: May 8th, 2019; accepted: May 24th, 2019; published: May 31st, 2019 Abstract Aiming at the problem of heavy launch vehicle riveting cabins assembly, such as unreasonable as-sembly process, assembly deviation and assembly deformation, the paper focuses on the research of the application of simulation technology. The method of assembly simulation to optimized as-sembly process by the software of DELMIA is put forward. The method of deviation simulation to optimized assembly tolerance by the software of CATIA 3DCS is put forward. The method of de-formation simulation by the software of Ls-DYNA is put forward to optimized assembly deforma-tion and assembly path. At last, the method is validated through an application case. Keywords Launch Vehicle, Riveting Cabin, Assembly Simulation, Deviation Simulation, Deformation Simulation 仿真分析技术在重型运载火箭舱段铆接装配中的应用 侯东旭1,呼啸1,张薇2,马遥1,安立辉3 1首都航天机械有限公司,北京 2北京宇航系统工程研究所,北京 3中国运载火箭技术研究院,北京 收稿日期:2019年5月8日;录用日期:2019年5月24日;发布日期:2019年5月31日
骨骼蒙皮动画(SkinnedMesh)的原理解析(一) 一)3D模型动画基本原理和分类 3D模型动画的基本原理是让模型中各顶点的位置随时间变化。主要种类有Morph(变形)动画,关节动画和骨骼蒙皮动画(SkinnedMesh)。从动画数据的角度来说,三者一般都采用关键帧技术,即只给出关键帧的数据,其他帧的数据使用插值得到。但由于这三种技术的不同,关键帧的数据是不一样的。 Morph(渐变,变形)动画是直接指定动画每一帧的顶点位置,其动画关键中存储的是Mesh 所有顶点在关键帧对应时刻的位置。 关节动画的模型不是一个整体的Mesh,而是分成很多部分(Mesh),通过一个父子层次结构将这些分散的Mesh组织在一起,父Mesh带动其下子Mesh的运动,各Mesh中的顶点坐标定义在自己的坐标系中,这样各个Mesh是作为一个整体参与运动的。动画帧中设置各子Mesh相对于其父Mesh的变换(主要是旋转,当然也可包括移动和缩放),通过子到父,一级级的变换累加(当然从技术上,如果是矩阵操作是累乘)得到该Mesh在整个动画模型所在的坐标空间中的变换(从本文的视角来说就是世界坐标系了,下同),从而确定每个Mesh在世界坐标系中的位置和方向,然后以Mesh为单位渲染即可。关节动画的问题是,各部分Mesh中的顶点是固定在其Mesh坐标系中的,这样在两个Mesh结合处就可能产生裂缝。 第三类就是骨骼蒙皮动画即SkinnedMesh了,骨骼蒙皮动画的出现解决了关节动画的裂缝问题,而且效果非常酷,发明这个算法的人一定是个天才,因为SkinnedMesh的原理简单的难以置信,而效果却那么好。骨骼动画的基本原理可概括为:在骨骼控制下,通过顶点混合动态计算蒙皮网格的顶点,而骨骼的运动相对于其父骨骼,并由动画关键帧数据驱动。一个骨骼动画通常包括骨骼层次结构数据,网格(Mesh)数据,网格蒙皮数据(skin info)和骨骼的动画(关键帧)数据。下面将具体分析。 二)SkinnedMesh原理和结构分析 SkinnedMesh中文一般称作骨骼蒙皮动画,正如其名,这种动画中包含骨骼(Bone)和蒙皮(Skinned Mesh)两个部分,Bone的层次结构和关节动画类似,Mesh则和关节动画不同:关节动画中是使用多个分散的Mesh,而Skinned Mesh中Mesh是一个整体,也就是说只有一个Mesh,实际上如果没有骨骼让Mesh运动变形,Mesh就和静态模型一样了。Skinned Mesh技术的精华在于蒙皮,所谓的皮并不是模型的贴图(也许会有人这么想过吧),而是Mesh本身,蒙皮是指将Mesh中的顶点附着(绑定)在骨骼之上,而且每个顶点可以被多个骨骼所控制,这样在关节处的顶点由于同时受到父子骨骼的拉扯而改变位置就消除了裂缝。Skinned Mesh这个词从字面上理解似乎是有皮的模型,哦,如果贴图是皮,那么普通静态模型不也都有吗?所以我觉得应该理解为具有蒙皮信息的Mesh或可当做皮肤用的Mesh,这个皮肤就是Mesh。而为了有皮肤功能,Mesh还需要蒙皮信息,即Skin数据,没有Skin数据就是一个普通的静态Mesh了。Skin数据决定顶点如何绑定到骨骼上。顶点
基于Solidworks的桥式起重机主梁有限元分析本文针对桥式起重机的结构特点,采用三维设计软件 solidworks建立了桥式起重机主梁结构的三维模型,并对其进行了应力分析与位移分析。分析指出主梁腹板截面突变处存在严重应力集中,降低了桥式起重机的承载力,对桥式起重机的正常运行过程存在安全影响。因此有必要在改造桥式起重机时,对主梁腹板进行特殊的考虑。 标签:桥式起重机SolidWorks 主梁 0 引言 桥式起重机的大梁横跨于跨间内一定高度的专用轨道上,可沿着轨道在跨间的纵向移动,在大梁上布置有起升装置,大多数起升装置采用起重小车,起升装置可沿着大梁在跨间横向移动,外观像是一条金属的桥梁,所以人们称为桥式起重机。桥式起重机也俗称“天车”。本文采用三维设计软件solidworks分析了目前在研究桥式起重机中存在的问题,对桥式起重机的主梁进行了建模和相应的理论计算,然后对其进行有限元分析,找出了主梁容易发生疲劳损伤的部位,为以后设计、运行与维护提供理论依据[1]。 1 研究对象 尽管桥式起重机的类型繁多,但其基本结构是相同的。桥式起重机主要由大梁,起升装置,端梁,大梁行走机构,起升装置行走机构,轨道和电气动力,控制装置等构成。主梁变形一般是指主梁上拱严重减少和残余下挠(空载时,起重机主梁低于水平线的下挠值),这对起重机的安全使用和承载能力都将产生严重影响,甚至可能发生人身和设备事故,所以主梁变形与设备安全密切相关,应引起设备管理人员,有关领导及天车、起重工的重视[2-3]。本文所研究对象的技术特性表和材料分别在表1,表2中列出。 2 基于Solidworks的三维建模 2.1 桥式起重机主梁三维参数化设计方法Solidworks是windows环境下的三维机械CAD软件。采用windows用户界面,具有三维CAD软件一贯提倡的易用性、高效性和功能强大,完整的提供了产品设计的解决方案。目前,使用solidworks软件进行参数化建模的主要技术特点是:①基于特征。将某些具有代表性的平面几何形状定义为特征,并将其所有尺寸存为可调参数,进而形成实体,以此为基础来进行更为复杂的几何形体的构造。②全尺寸约束。将形状和尺寸联系起来考虑,通过尺寸约束来实现对几何形状的控制。③尺寸驱动设计。通过编辑尺寸数值来驱动几何形状的改变,尺寸参数的修改将导致其他相关模块中的相关尺寸的全盘更新。采用这种技术的理由在于它能够彻底的克服自由建模的无约束状态,几何形状均以尺寸的形式而被牢牢地控制住[4]。
一种造船门式起重机的主结构有限元分析方法 【摘要】在四种危险工况下,对造船门式起重机的主结构进行了结构静力学有限元和分析。分析了其等效应力、位移云图。通过与起重机设计规范相比较,该门式起重机的强度及静刚度均满足设计规范的要求。 【关键词】门式起重机;静力学;有限元 门式起重机(以下简称门机)是一个桥架形承载结构的起重机[1],可用于搬运货物、装卸及安装建筑构件等,尤其能在铁路及港口货场的装卸中发挥重要作用。而门机在提高工作效率、节省人力的同时,也存在着巨大的安全隐患,寻求一种在能评估门式起重机安全运行的方法势在必行[2,5]。振动不但可能会造成门机结构破坏,当所受激振力的频率与结构的的某一固有频率相接近时,会引起共振[3,4],造成结构强度的破坏及产生不允许的大变形,破坏整机的性能。 1门机有限元模型的建立 1.1门机基本参数 双梁式门机由主梁、柔性支腿、刚性支腿、大车、上小车、下小车、操纵室等构成,如图1所示,选用的门机参数如下所述。 门机相关基本参数:主梁跨度48.124m,起升高度42m,上小车轨距6.33m,下小车轨距2.6m;上小车自重9.9t,最大起重量200t,起升速度5 m/min;下小车自重5.5t,主起升机构最大起重量150t,起升速度5 m/min,副起升机构起重量10t,起升速度12.2 m/min;大车运行速度:30m/min,大车轨距43米;门机主要材料为Q345B,杨氏模量为2.06×1011,密度为7850kg/m3,泊松比为0.3。 1.2模型的单元组成 门机的刚性支腿、主梁结构是由薄板焊接成的箱体梁,柔性支腿是由钢板焊接而成的圆管。为使原模型真实,计算模型单元选择如下:门架结构选用空间板单元shell63,小车等附件在模型的相应节点处设置质单元。建立的有限元模型如图2所示。 图1门式起重机结构示意图 Fig.1The Sketch Map of The Gantry Crane 图2 有限元模型 Fig.2The Finite Element Model 2门机的结构静力学分析 作用在门式起重机上的外载荷种类多,工况较复杂,计算分析时只考虑与门式起重机结构破坏形式有关的典型工况,就能确定结构强度与刚度是否满足要求,从而进一步改进设计。根据该门机设计要求(两小车同时工作时,最大抬吊重量300t,上下小车相距至少12米)考虑最危险的四种工况:①上小车位于主梁柔性支腿侧,下小车距上小车12m;②上小车位于主梁跨中,下小车偏向柔性支腿处,距上小车12m;③上小车位于主梁刚性支腿侧,下小车距上小车12m; ④上小车位于主梁跨中,下小车偏向刚性支腿处,距上小车12m。 表1门式起重机静态有限元计算结果 Tab.1Static Calculation Results in ANSYS of Gantry Crane 按第Ⅱ类载荷组合进行结构强度计算[5],对建立的有限元模型进行加载求解,利用V on Mises屈服准则评判结构应力值,各工况下最大应力值及最大位移
履带式起重机的组成及工作原理 来源: 本站发表日期:08-01-18 09:11 编辑: lxh 一、履带式起重机概况 履带式起重机是在行走的履带式底盘上装有行走装置、起重装置、变幅装置、回转装置的起重机。履带式起重机有一个独立的能源,结构紧凑、外形尺寸相对较小,机动性好,可满足工程起重机流动性的要求,比较适合建筑施工的需要,达到作业现场就可随时技入工作。 履带式起重机按传动方式不同,可分为机械式、液压式和电动式三种。其中,机械式又分为内燃机一机械驱动和电动一机械驱动两种。 目前,工程起重机通常采用以下复合驱动方式: 内燃机一电力驱动内燃机一电力驱动与外接电源的电力驱动的主要区别是动力源不同,前者采用独立的内燃机作动力源,后者外接电网电源。内燃机一电力驱动通常是由柴油机驱动发电机发电,把内燃机的机械能转化为电能,传送到工作机构的电动机上,再变为机械能带动工作机构运转。 内燃机一液压驱动内燃机一液压驱动在现代工程起重机中得到了越来越广泛的应用,主要原因一是柴油发动机机械能转化为液压能后,实现液压传动有许多优越性,二是由于液压技术发展很快,使起重机液压传动技术日趋完美。 二、履带式起重机的组成部分 如下图所示,履带式起重机主要由下列几部分组成。
1. 取物装置 履带式起重机的取物装置主要是吊钩(抓斗、电磁吸盘等作为附属装置)。 2. 吊臂 用来支承起升钢丝绳、滑轮组的钢结构,它可以俯仰以改变工作半径。它直接装在上部回转平台上。吊臂可以根据施工需要在基本吊臂基础上接长。在必要时,还可在主吊臂的顶端装一吊臂,扩大作业范围,这种吊臂称副臂。 3. 上车回转部分 它是在起重作业时可以回转的部分包括装在回转平台上除吊臂、配重、吊钩等以外的全部
桥式起重机主梁结构有限元分析
一、桥式起重机介绍 桥式起重机是横架于车间、仓库和料场上空进行物料吊运的起重设备。由于它的两端坐落在高大的水泥柱或者金属支架上,形状似桥。桥式起重机的桥架沿铺设在两侧高架上的轨道纵向运行,可以充分利用桥架下面的空间吊运物料,不受地面设备的阻碍。它是使用范围最广、数量最多的一种起重机械。 桥式起重机一般由桥架(又称大车),提升机构、小车、大车移行机构,操纵室,小车导电装置(辅助滑线),起重机总电源导电装置(主滑线)等部分组成。 桥架是桥式起重机的基本构件,它由主梁、端梁、走台等部分组成。主梁跨架在跨间上空,有箱形、析架、腹板、圆管等结构形式。主梁两端连有端梁,在两主梁外侧安有走台,设有安全栏杆。在驾驶室一侧的走台上装有大车移行机构,在另一侧走台上装有往小车电气设备供电的装置,即辅助滑线。在主梁上方铺有导轨,供小车移动。整个桥式起重机在大车移动机构拖动下,沿车间长度方向的导轨上移动。 1.主梁 我们本次研究的是75t桥式起重机的主梁结构,主梁是起重机的主要承重结构,对于它的受力分析及工作状况的校核是很有必要的。 (1)桥式起重机主梁的CAD图纸
我们使用的是solidworks进行的建模,下面是我们的模型图: 模型剖视图:
小车工况分析: 从图纸中我们可以看出主钩的工作范围(即小车在梁上的运动范围),小车在梁上的各段进行工作是对梁造成的负载是不同的,因此在对梁施加载荷前,我们要对主梁的模型进行一些处理,使载荷能单独的加在主梁各段,较为精确的模拟主梁的受力情况; 主梁模型的处理: 我们使用Workbench对模型进行切片处理,把主梁分成7个部分,其中需要加载荷的部分为中间有:A、B、C、D、E五部分,其中这五部分的长度都与小车长度基本相等,以此来模拟小车在梁上不同位置工作时的工况。
起重机的机械组成及工 作原理 Document number:NOCG-YUNOO-BUYTT-UU986-1986UT
起重机的组成及工作原理 起重机由驱动装置、工作机构、取物装置、操纵控制系统和金属结构组成。通过对控制系统的操纵,驱动装置将动力的能量输入,转变为机械能,在传递给取物装置。取物装置将被搬运物体与起重机联系起来,通过工作机构单独或组合运动,完成物体搬运任务。可移动金属结构将各组成部分连接成一个整体,并承载起重机的自重和吊重。 起重机的组成及工作原理 图2-3起重机的工作原理 一、驱动装置 驱动装置是用来驱动工作机构的动力设备。常见的驱动设备有电力驱动、内燃机驱动和人力驱动等,电能是清洁、经济的能源,电力驱动是现代起重机的主要驱动方式。 二、工作机构 工作机构包括:起升机构、运行机构。 a)起升机构是用来实现物体的垂直升降的机构是任何起重机部可缺少的部分,因此它是起重机最主要、最基本的机构。 b)运行机构是通过起重机或起升小车来实现水平搬运物体的机构,可分为有轨运行和无轨运行。 三、取物装置 取物装置是通过吊钩将物体与起重机联系起来进行物体吊运的装置。根据被吊物体不同的种类、形态、体积大小,采用不同种类的取物装置。合适的取物装置可以减轻工作人员的劳动强度,大大提高工作效率。防止吊物坠落,保证工作人员的安全和吊物不受损伤时对取物装置安全的基本要求。 四、金属结构 金属结构是以金属材料轧制的型钢和钢板做为基本构件,通过焊接、铆接、螺栓连接等方法,按一定的组成规则连接,承受起重机的自重和载荷的钢结构。 金属结构的重量大约是整台起重机的40%-70%左右,重型起重机可达到90%;金属结构按照它的构造可分为实腹式和格构式两类,组成起重机的基本受力构件。起重机金属结构的工作特点有受力复杂、自重大、耗材多和整体可移动性。起重机的金属结构是起重机的重要组成部分,它是整台起重机的骨架,将起重机的机械和电气设备连接组合成一个有机的整体,承受和传递作用在起重机上的各种载荷并形成一定的作业空间,以便使起吊的重物搬运到指定的地点。
1 ?在视图中创建一个跟模型差不多高的 CS 骨骼。 Φ ∣π ∕?∣vM1 fX ∣ Jlii ?i?odr?l ∣ Fh W UY 氏 1 WlTl - I i rr a d 1 --- S3. :L l 丫 ; a iflκ?1 二 IWr ?,ι H* **回? Q 国辽L Eki Sd ? 34 ? -1?- r ■ ^??w ?n? X W I ?f! F “ P r 'i ?'l $” 或"帝 Hb ELt TJLL Se OMW *?∣∣* 3j?ιsΛ? FyLLK J S IIIjtLiI G-a ∣∕fcI≠JU i > E,7∣
2 ?根据列图在运动面版中修改参数,主要是调整颈部,胸部,手指,腿部和脚趾的关节数量,使骨骼关节数与模型适当。 ?∣-j÷iα 1-^J-哄H - * I 1' -T ^ [ X -P-"iT : I - - II Irrl 八g T 厂 ” ? 二 」 £ ? C τ - e V
3 ?当骨骼数量设置好以后,使用移动和旋转工具调整骨骼的位置,并缩放骨骼大小,使骨骼的一边与模型相匹配,另一边我们可以复制后粘贴。 4 ?对骨骼的另一边进行复制后粘贴,检查骨骼是否与模型完全匹配。
*srzπ∣7TPE∏d?- '?,d?∣' Xi sz* ι*rιKJr i ■ ≡≠ ! ?-B>Lj, j≡! Lf*l-?rf ∣l C 、 3M 住n? 甦>fi?? ??LTg Si'?f^ 5 .选择模型,在修改器中选择Skin修改器。 ?r S? ?1 ■> L r ?>Y-i? !l I ■ '≡1'∣4* ?F?.r r∣≠t-?* l r5t-≡- ∣*f ∕WT*!T Γ?!??? Γ ∣jb'Arik ■ 「商??c? Γ LlFkta -j Λ-? t∣>π?^^ I 沽?≠uηβ∣H 3 W M-t> I l,η-' M S R ■件h U - V,M A?,!∣ jt÷e Ii i LW -F ?7i?r . *X = ∣Γ ?L P JL ^ l?卜IeX^ JLJ-J l*< 1? ? ?i" ? i HtM ftt∣∣* TtMcOjG1AVri J !≡*J ?∏p3? ,-yτ ,√r∣ S i--',≡≠ ■ ? I m Ξ榔3 : ”I E&n f∣z?cte 1:C4-JUEL O5k ??:?!**?∣ *?也肝??τ:■?£ j!' τ?≡ [ej
履带式起重机臂架有限元分析 摘要:为了解决在传统设计方法下履带式起重机试制样机成本高、设计效率低等弊端,应用CAE软件ANSYS对SC50C液压履带式起重机的臂架进行建模与有限元分析,通过对臂架的强度校核,验证了该型履带式起重机设计方案的合理性,也验证了有限元分析法的可行性。从而为履带式起重机产品的设计、生产和制造提供理论依据。 关键词:履带式起重机;臂架;ANSYS软件;强度分析 0 引言 履带起重机是广泛应用于国民经济各领域的一种起重设备,随着我国经济建设的发展,对其需求量越来越大,对其性能的要求也越來越高。履带式起重机臂架是履带式起重机的重要组成部分,它是靠电动机驱动来完成物料吊卸的空间桁架结构,其设计水平的高低直接影响整机的工作性能。以前起重机设计多采用以力学与数学为基础的半理论半经验设计法,设计过程重复、周期长、精度低,设计出的产品粗大笨拙,已难以适应市场需要。而起重机臂架作为起重机的工作装置,在起重机产品的设计内容中处于核心地位,其传统的设计方法又往往是依据材料力学中的许用应力校核原理得出的,真正分析的对象仅仅是臂架结构的截面形状和面积等参数。由于受工作量限制,该方法只能验算几个在理论上认为是危险的截面,计算的精度从建模开始就受到限制,不仅工作量很大并且具有一定的盲目性,已不能适应由激烈市场竞争造成的最短周期产品设计的要求。 目前国内外广泛应用大型有限元软件ANSYS对起重机的初始设计方案进行有限元分析,校验设计方案中是否存在问题,为起重机设计提供理论基础,从而使其结构参数符合起重机设计规范要求。采用有限元分析的方法进行机械产品的设计计算将会极大地提高设计效率、保证其设计质量。设计者只需借助通用有限元软件建立模型并进行仿真分析,就能真实地反映机械产品的尺寸外形特征和工作过程,并进行各种类型的力学分析,尽早发现设计缺陷,从而有效地缩短研发周期,降低生产成本,使产品的结构和性能更加合理。本文应用有限元软件ANSYS对履带式起重机臂架结构进行快速校核分析。 1.臂架结构的载荷分析 结合相关设计标准和工程经验,起重机臂架静强度分析计算时需要考虑的主要载荷如下。 1.1.在变幅平面内,臂架为铰接外伸梁,臂架与平台相连处简化为固定铰支座,变幅钢丝绳下铰点处简化为可动支座,外载荷包括吊重、臂架自重、变幅绳拉力、起升绳拉力,如下图a所示。 1.2.在回转平面内,臂架下端一侧简化为固定铰支座,另一侧简化为可动铰
浅析起重机吊臂结构的有限元分析与优化 发表时间:2019-04-08T09:26:17.523Z 来源:《建筑学研究前沿》2018年第34期作者:黄浩 [导读] 以起重机吊臂为分析对象,采用CERO软件建模,以有限元分析软件ANSYSWorkbench为平台,在各种典型的工作条件下对起重机臂进行有限元分析 广东省特种设备检测研究院珠海检测院 519000 摘要:以起重机吊臂为分析对象,采用CERO软件建模,以有限元分析软件ANSYSWorkbench为平台,在各种典型的工作条件下对起重机臂进行有限元分析,并利用ansys软件对基础臂的截面参数进行优化。将目标函数设置为起重机臂的重量,并对其进行优化,以满足强度和刚度作为约束的要求。计算最合理的结构以节约成本。 关键词:CERO 软件建模 ANSYS Workbench 有限元分析结构优化 引言:随着我国起重机行业的不断壮大,起重机吊臂结构有限元的问题引起了人们的重视。市场反馈的信息及客户需求,制定了 2013— 2014 年度随车起重机吊臂结构优化设计指标及措施: 1.吊臂采用HG70高强度结构钢,强度提高10%。相比HG60钢重量降低6%。 2.吊臂最大工作幅度同比国内同型号产品增加8%,10 t机型基本臂达到 4500 mm,工作范围增加 8%。 3.吊臂优化设计,筒体焊缝减少到道焊缝,焊缝长度降低到同类型号的1 /4 ~ 1 /2(其他机型有的多达8条焊缝,对焊接要求很高),且大大减少焊后校正的工作量。 4.吊臂增加了滑块接触点与接触面积,提高了吊臂的可靠性。采用4点支撑,加大滑块面积。 5.吊臂内置伸缩机构,设计上采用了具有部分带载伸缩的结构,整个吊臂整洁美观,保护伸缩机构效果好,内部采用全钢滑轮及重载轴承,且具有一定的带载伸缩能力。 吊臂的结构形式主要由吊臂本体结构:即各吊臂的截面形状,吊臂工作长度,加强结构,伸缩机构设计决定。对吊臂本体结构和伸缩机构进行了优化设计。 1 吊臂本体结构设计 吊臂大都采用以高强度钢板为主的箱形截面,国内起重机吊臂的截面形式主要有四边形、五边形、六边形、八边形等,而中小吨位的起重机吊臂截面形式以五边形居多。国外的起重机发展时间较长,吊臂的截面形式主要是优化设计过的圆角化多边形、椭圆形、U 形等,如德国和意大利的起重机吊臂截面主要以椭圆形居多,而国内只有徐工的大型全路面起重机才使用这样的截面形式。国内的起重机的吊臂结构基本上都是两块钢板折弯后对焊,整体结构粗糙且不够合理。选用了强度较好,工艺性好的六边型截面,并对起重机吊臂结构进行合理的力学分析和优化设计,可以在保证吊臂结构强度和刚度的前提下,较好地选择吊臂截面形状与尺寸,从而减轻吊臂的自重,进而可以提高吊臂的整体起重性能。对于吊臂结构的研究,如果采用传统的力学方法来设计和分析起重机吊臂,不但计算量巨大,理论模型与实际相差远,而且精度较低,设计师为了保证吊臂结构的安全性和可靠性,往往采取加大安全系数的方法来设计,这样制造出来的起重机就显得粗糙和笨重。领域里广泛应用的有限元法与 CAD 技术相结合,来共同实现“设计-评价-再设计”任务的分析自动化,先CERO 进行建模,然后利用整合在一起的有限元软件 AN-SYS WORKBENCH 对吊臂进行各种典型工况的有限元分析,大大缩短了对其结构进行研究设计和分析的循环周期,提高了产品可靠性,降低了材料的消耗和生产成本,因此具有良好的社会效益和经济效益。 CERO详细建模,各个截面尺寸确定及 ANSYS WORK-BENCH 联合分析,具体见图 1 ~ 8。