第3章设计计算
3.1 汽车转向系主要参数的选择
3.1.1 汽车主要尺寸的确定
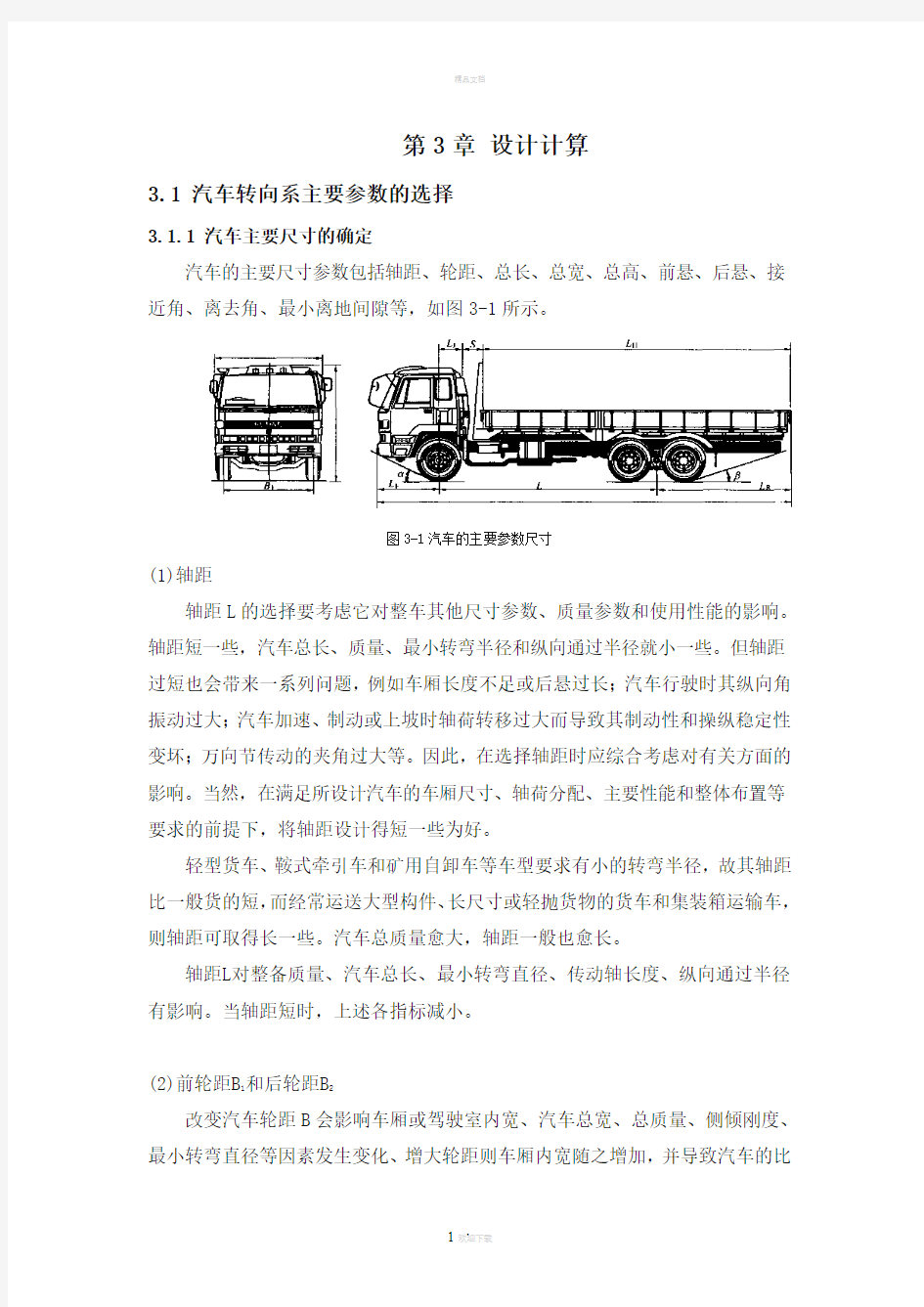
汽车的主要尺寸参数包括轴距、轮距、总长、总宽、总高、前悬、后悬、接近角、离去角、最小离地间隙等,如图3-1所示。
图3-1汽车的主要参数尺寸
(1)轴距
轴距L的选择要考虑它对整车其他尺寸参数、质量参数和使用性能的影响。轴距短一些,汽车总长、质量、最小转弯半径和纵向通过半径就小一些。但轴距过短也会带来一系列问题,例如车厢长度不足或后悬过长;汽车行驶时其纵向角振动过大;汽车加速、制动或上坡时轴荷转移过大而导致其制动性和操纵稳定性变坏;万向节传动的夹角过大等。因此,在选择轴距时应综合考虑对有关方面的影响。当然,在满足所设计汽车的车厢尺寸、轴荷分配、主要性能和整体布置等要求的前提下,将轴距设计得短一些为好。
轻型货车、鞍式牵引车和矿用自卸车等车型要求有小的转弯半径,故其轴距比一般货的短,而经常运送大型构件、长尺寸或轻抛货物的货车和集装箱运输车,则轴距可取得长一些。汽车总质量愈大,轴距一般也愈长。
轴距L对整备质量、汽车总长、最小转弯直径、传动轴长度、纵向通过半径有影响。当轴距短时,上述各指标减小。
(2)前轮距B
1和后轮距B
2
改变汽车轮距B会影响车厢或驾驶室内宽、汽车总宽、总质量、侧倾刚度、最小转弯直径等因素发生变化、增大轮距则车厢内宽随之增加,并导致汽车的比
功率、币转矩指标下降,机动性变坏。
受汽车总宽不得超过2.5m限制,轮距不宜过大。但在选定的前轮距B
1
范围内,应能布置下发动机、车架、前悬架和前轮,并保证前轮有足够的转向空间,
同时转向杆系与车架、车轮之间有足够的运动间隙。在确定后轮距B
2
时,应考虑两纵梁之间的宽度、悬架宽度和轮胎宽度以及它们之间应留有必要的间隙。 (3)外廓尺寸
汽车的外廓尺寸包括其总长、总宽、总高。它应根据汽车的类型、用途、承载量、道路条件、结构选型与布置以及有关标准、法规限制等因素来确定。
GB1589-79 对汽车外廓尺寸界限做了规定,总高不大于4m,总宽(不包括后视镜)不大于2.5m;外开窗,后视镜等突出部分宽250mm。总长:货车及越野车不大于12m;一般大客车不大于12m,铰接式大客车不大于18m;牵引车带半挂车不大于16m,汽车拖带挂车不大于20m,挂车长度不大于8m。
根据毕业设计课题及以上的论述,本次设计初选尺寸数据如下:
轴距: L=6800mm 总长: L
长
=11800mm
前轮距: B
1=2280mm 总宽: L
宽
=2400mm
后轮距: B
2=2270mm 总高: L
高
=3280mm
3.1.2 汽车质量参数的确定
汽车的质量参数包括整车整备质量m0、装载质量m
e
、质量系数η、汽车总质量ma、轴荷分配等。
(1)整车整备质量m0
整车整备质量是指车上带有全部装备(包括随车工具、备胎等),加满燃料、水,但没有装货和载人时的整车质量。
整车整备质量对汽车的制造成本和燃油经济型有影响。目前,尽可能减少整车整备质量的目的是:通过减轻整备质量增加载质量或载客量,抵消因满足安全标准、排气净化标准和噪声标准所带来的整备质量的增加,节约燃料。减少整车整备质量的措施主要有:新设计的车型应使其结构更合理,采用强度足够的轻质材料,如塑料、铝合金等等。过去用金属材料制作的仪表板、油箱等大型结构件,
用塑料取代后减重效果十分明显,目前得到比较广泛的应用。今后,塑料载汽车上会进一步得到应用。
(2)汽车的载质量m
e
汽车的载质量是指在硬质良好路面上行驶时所允许的额定载质量。汽车在碎石路面上行驶时,载质量约为好路面的75%~85%。越野汽车的载质量是指越野汽车行驶时或在土路上行驶的额定在质量。
商用货车载质量m
e
的确定,首先应与企业商品规划符合,其次要考虑到汽车的用途和使用条件。原则上,货流大、运距长或矿用自卸车应采用大吨位货车以利降低运输成本,提高效率;对货源变化频繁、运距短的市内运输车,宜采用中、小吨位的货车比较经济。
(3) 质量系数η
质量系数η是指汽车装载质量与整车整备质量的比值,即η=m
e /m
。该系
数反映了汽车的设计水平和工艺水平,η值越大,说明该汽车的结构和制造工艺越先进。
(4)汽车总质量ma
汽车总质量ma是指装备齐全,并按规定装满客、货时的整车质量。
(5)轴荷分配
汽车的轴荷分配是汽车的重要质量参数,它对汽车的牵引性、通过性、制动性、操纵件和稳定性等主要使用性能以及轮胎的使用寿命都有很大的影响。因此,在总体设计时应根据汽车的布置型式、使用条件及性能要求合理地选定其轴荷分配。汽车的布置型式对轴荷分配影响较大,例如对载货汽车而言,长头车满载时的前轴负荷分配多在28%上下,而平头车多在33%~35%。对轿车而言,前置发动机前轮驱动的轿车满载时的前轴负荷最好在55%以上,以保证爬坡时有足够的附着力;前置发动机后轮驱动的轿车满载时的后轴负荷一般不大于52%;后置发动机后轮驱动的轿车满载时后轴负荷最好不超过59%,否则,会导致汽车具有过多转向特性而使操纵性变坏。
在确定轴荷分配时也要考虑到汽车的使用条件。对于常在较差路面上行驶的载货汽车,为了保证其在泥泞路而上的通过能力,常将满载前轴负荷控制在26%~27%,以减小前轮的滚动阻力并增大后驱动轮的附着力。对于常在潮湿路
面上行驶的后驱动轮装用单胎的4×2平头货车,空载时后铀负荷应不小于41%,以免引起例滑。
在确定轴荷分配时还要充分考虑汽车的结构特点及性能要求。例如:重型矿
用自卸汽车的轴距短、质心高,制动或下坡时质量转移会使前轴负荷过大,故在设计时可将其前轴负荷适当减小,使后轴负荷适当加大。
根据毕业设计课题及以上的论述,本次设计初选质量数据如下:
汽车总质量: ma=150t
整车整备质量: m 0=60t
满载时车辆前轴负荷: 28%×150t=42t
3.1.3 转向系的主要性能参数
(1)转角及最小转弯半径
最小转弯半径是指转向轮转角在最大位置条件下,汽车低速行驶时前外转向
轮与地面接触点的轨迹到转向中心O 点的距离。
汽车的机动性,常用最小转弯半径来衡量,但汽车的高机动性则应由两个条
件保证。即首先应使转向轮转到最大转角时,汽车的最小转弯半径能达到汽车轴距的2-2.5倍;其次,应这样选择转向系的角传动比,即由转向盘处于中间的位置向左或右旋转至极限位置的总旋转圈数,对轿车应不超过2圈,对货车不应超过3圈。
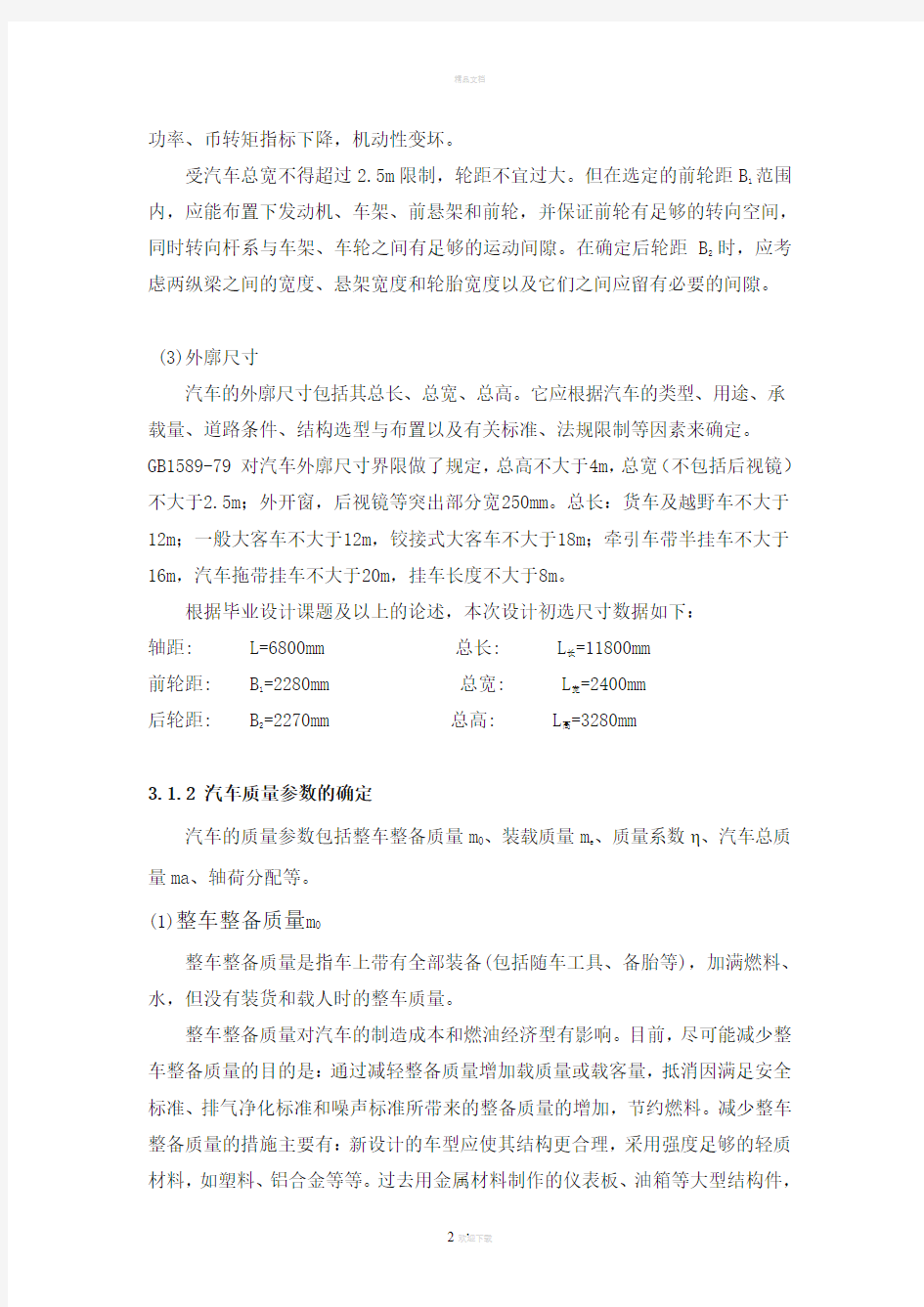
汽车在转向时,若不考虑轮胎的侧向偏离,其内、外转向轮理想的转角关系
如图3-3所示,由下式决定:
L K BD CO DO i o =-=
-θθcot cot (3-1) 式中:
θo —外转向轮转角;
θi
—内转向轮转角; K —两转向主销中心线与地面交点间的距离;
L —汽车轴距
汽车的最小转弯半径R min 与其内、外转向轮在最大转角θi 与θo 、轴距L 、
主销距K 及转向轮的转臂a 等尺寸有关。在转向过程中除内、外转向轮的转角外,其他参数是不变的。最小转弯半径是指汽车在转向轮处于最大转角的条件下以低速转弯时前外轮与地面接触点的轨迹构成圆周的半径。可按下式计算:
a L o R +=θmax min sin
(3-2)
图3-2理想的内、外转向轮转角间的关系
初选汽车的轴距为:L =6800mm ,而外转向轮偏转角的最大值θmax o 一般取45o,取
转向轮转臂a=0.3m 。
所以计算出最小转弯半径:R min ≈10m
(2)转向系的效率
功率p 1从转向轴输入,经转向摇臂轴输出所求得的效率称为转向器的正效
率,用符号η+
表示,;反之称为逆效率,用符号η-
表示。 正效率η+
计算公式: p p p 121-=+η
(3-3) 逆效率η-计算公式: p p
p 323-=-η
(3-4)
式中, p 1为作用在转向轴上的功率;p 2为转向器中的磨擦功率;p 3
为作用在转向摇臂轴上的功率。
正效率高,转向轻便;转向器应具有一定逆效率,以保证转向轮和转向盘的
自动返回能力。但为了减小传至转向盘上的路面冲击力,防止打手,又要求此逆效率尽可能低。
1) 转向器的正效率η+
影响转向器正效率的因素有转向器的类型、结构特点、结构参数和制造质量
等。在几种转向器中,齿轮齿条式、循环球式转向器的正效率比较高,而蜗杆指销式的正效率要明显的低些。同一类型转向器,因结构不同效率也不一样。如蜗杆滚轮式转向器的滚轮与支持轴之间的轴承可以选用滚针轴承、圆锥滚子轴承和球轴承。选用滚针轴承时,除滚轮与滚针之间有摩擦损失外,滚轮侧翼与垫片之间还存在滑动摩擦损失,故这种转向器的效率η+仅有54%。另外两种结构的转向器效率分别为70%和75%。
转向摇臂轴的轴承采用滚针轴承比采用滑动轴承可使正或逆效率提高约
10%。
如果忽略轴承和其经地方的摩擦损失,只考虑啮合副的摩擦损失,对于蜗杆
类转向器,其效率可用下式计算
)tan(tan 00ρη+=
+a a
(3-5) 式中,0α为蜗杆(或螺杆)的螺线导程角;ρ为摩擦角,ρ=arctanf ;f 为
磨擦因数。
2) 转向器的逆效率η-
根据逆效率不同,转向器有可逆式、极限可逆式和不可逆式之分。
路面作用在车轮上的力,经过转向系可大部分传递到转向盘,这种逆效率较
高的转向器属于可逆式。它能保证转向轮和转向盘自动回正,既可以减轻驾驶员
的疲劳,又可以提高行驶安全性。但是,在不平路面上行驶时,传至转向盘上的车轮冲击力,易使驾驶员疲劳,影响安全行驾驶。
属于可逆式的转向器有齿轮齿条式和循环球式转向器。
不可逆式和极限可逆式转向器
不可逆式转向器,是指车轮受到的冲击力不能传到转向盘的转向器。该冲击
力转向传动机构的零件承受,因而这些零件容易损坏。同时,它既不能保证车轮自动回正,驾驶员又缺乏路面感觉,因此,现代汽车不采用这种转向器。
极限可逆式转向器介于可逆式与不可逆式转向器两者之间。在车轮受到冲击
力作用时,此力只有较小一部分传至转向盘。
如果忽略轴承和其它地方的磨擦损失,只考虑啮合副的磨擦损失,则逆效率
可用下式计算
0tan )tan(a a ρη-=- (3-6) 式(3-5)和式(3-6)表明:增加导程角a 0,正、逆效率均增大。受η-增
大的影响,a 0不宜取得过大。当导程角小于或等于磨擦角时,逆效率为负值或
者为零,此时表明该转向器是不可逆式转向器。为此,导程角必须大于磨擦角。通常螺线导程角选在8°~10°之间。
(3)转向力
(4)传动比变化特性
1)转向系传动比
转向系的传动比包括转向系的角传动比0ωi 和转向系的力传动比p i 。
转向系的力传动比: h W p F F i /2= (3-9) 转向系的角传动比: k k k w d d dt d dt d i β?β?ωωω===//0 (3-10)
转向系的角传动比0ωi 由转向器角传动比ωi
和转向传动机构角传动比ωi '组成,即
ω
ωωi i i '=0=25 (3-11)
转向器的角传动比: p p p w d d dt d dt d i β?β?ωωω===// (一般取ωi
=25) (3-12) 转向传动机构的角传动比: k
p k p k p d d dt d dt d i ββββωωω==='// ( 一般取ω
i '=1) (3-13)
2)转向系力传动比与转向系角传动比的关系 轮胎与地面之间的转向阻力F W 与作用在转向节上的转向阻力矩M r 的关系
式:
a
M Fw r = (3-14) 式中,α为主销偏移距(一般取0.3m),指从转向节主销轴线的延长线与支承
平面的交点至车轮中心平面与支承平面交线间的距离。计算Fw=2.2×105N
作用在转向盘上的手力F h 与作用在转向盘上的力矩M h 的关系式:
sw h h D M F 2= (3-15)
式中,M h 为作用在转向盘上的力矩;D sw 为转向盘直径。
将式(3-12)、式(3-13)代入 h W p F F i /2=后得到 a
M D M i h sw r p = (3-16)
计算得p i =46 如果忽略磨擦损失,根据能量守恒原理,2Mr/M h 可用下式表示
02ωβ?i d d M M k
h r == (3-17)
将式(3-17)代入式(3-16)后得到
a
D i i sw p 20ω=
(3-18)
当α和D
sw 不变时,力传动比p
i越大,虽然转向越轻,但0ωi也越大,表明
转向不灵敏。
3.2 循环球式转向器设计计算
循环球式转向器中有两级传动副,第一级是由螺杆和螺母共同形成的螺旋槽内装有钢球构成的传动副,第二级是由螺母上齿条与摇臂轴上齿扇构成的齿条-齿扇传动副,如下图。
图3-3 循环球式转向器示意图
3.2.1参数的选取及计算
根据毕业设计要求以及机械设计手册,然后参考同类汽车的参数进行初选,经强度验算后,再进行修正。
初选数据:
齿扇模数m=6.5mm;整圆齿数z=13;钢球中心距D=40mm;螺杆外径
1
D=38mm;
钢球直径d=7.144mm;螺线导程角
α=7°;螺距p=11mm;工作圈数W=2.5;
图3-4 螺杆-钢球-螺母传动副
(1)螺母内径2D 应大于1D ,(取螺杆外径1D =38mm,钢球中心距D=40mm ),一般要求
D D D %)10~%5(12=- (3-19)
2D =1D +(5%~10%)D=38+8%×40
=41 mm
(2)钢球数量n (取钢球直径d=7.144mm ,螺线导程角0α=7°,则1cos 0≈α)
钢球直径尺寸d 取得大,能提高承载能力,同时螺杆和螺母传动机构和转响
器的尺寸也随之增大。
增加钢球数量n ,能提高承载能力,但是钢球流动性变坏,从而使传动效率
降低。因为钢球本身有误差,所以共同参加工作的钢球数量并不是全部钢球数。经验证明,每个环路中的钢球数以不超过60粒为好。为保证尽可能多的钢球都承载,应分组装配。每个环路中的钢球数可用下式计算
n =14.447.114
5.240πd πDW cos d πDW 0=??=≈a 粒 (3-20) ≈45粒
(3)滚道截面半径R 2
当螺杆和螺母各有两条圆弧组成,形成四段圆弧滚道截面时,见图3-5,钢
球与滚道有四点接触,传动时轴向间隙最小,可满足转向盘自由行程小的要求。图中滚道与钢球之间的间隙,除用来贮存润滑油之外,还能贮存磨损杂质。为了减少摩擦,螺杆与螺母沟槽的半径R2应大于钢球半径d/2,一般取R2=(0.51~0.53)d 。螺杆滚道应倒角,用来避免该处被啮出毛刺而划伤钢球后降低传动效率。
1 汽车转向系统的功能 1.1 驾驶者通过方向盘控制转向轮绕主销的转角而实现控制汽车运动方向。 对方向盘的输入有两种方式:对方向盘的角度输入和对方向盘的力输入。装有动力转向系统的汽车低速行驶时,操作方向盘的力很轻,却要产生很大的方向盘 转角输入,汽车的运动方向纯粹是由转向系统各杆件的几何关系所确定。这时, 基本上是角输入。而在高速行驶时,可能出现方向盘转角很小,汽车上仍作用有 一定的侧向惯性力,这时,主要是通过力输入来操纵汽车。 1.2 将整车及轮胎的运动、受力状况反馈给驾驶者。这种反馈,通常称为路感。 驾驶者可以通过手—---感知方向盘的震动及运转情况、眼睛—---观察汽车运动、 身体—---承受到的惯性、耳朵—---听到轮胎在地面滚动的声音来感觉、检测汽车 的运动状态,但最重要的的信息来自方向盘反馈给驾驶者的路感,因此良好的路 感是优良的操稳性中不可缺少的部分。 反馈分为力反馈和角反馈 从转向系统的功能可以得知:人、车通过转向系统组成了人车闭环系统,是驾驶者对汽车操纵控制的一个关键系统。 2 转向系统设计的基本要求 转向系是用来保持或者改变汽车行驶方向的机构,在汽车转向行驶时,保证各转向轮之间有协调的转角关系。转向系的基本要求如下: 2.1 汽车转弯时,全部车轮应绕瞬时回转中心(瞬心)旋转,任何车轮不应有侧滑。 不满足这项要求会加剧轮胎磨损,并降低汽车的操作稳定性。实际上,没有哪 一款汽车能完全满足这项要求,只能对转向梯形杆系进行优化,一般在常用转向 角(轮15°~25°围)使转向外轮运动关系逼近上述要求。 2.2 良好的回正性能 汽车转向动作完成后,在驾驶者松开方向盘的条件下,转向轮能自动返回到直线行驶位置,并稳定行驶。转向轮的回正力矩的大小主要由悬架系统所决定的前 轮定位参数确定,一般来说,影响汽车回正的因素有:轮胎侧偏特性、主销倾角、 主销后倾角、前轮外倾、转向节上下球节的摩擦损失、转向节臂长、转向系统的 逆效率等。 2.3汽车在任何行驶状态下,转向轮不得产生自振,方向盘没有摆动。 2.4 转向机构与悬架机构的运动不协调所造成的运动干涉应尽可能小,由于运动干涉使转向轮产生的摆动应最小。 汽车转弯行驶时,作用在汽车质心处的离心力的作用,轮载荷减小,外轮载荷
计算器模拟系统设计 学生:XXX 指导教师:XXX 内容摘要:本设计是基于51系列的单片机进行的简易计算器系统设计,可以完成计算器的键盘输入,进行加、减、乘、除3位无符号数字的简单四则运算,并在LED 上相应的显示结果。 设计过程在硬件与软件方面进行同步设计。硬件选择AT89C51单片机和 74lS164,输入用4×4矩阵键盘。显示用5位7段共阴极LED静态显示。软件从分析计算器功能、流程图设计,再到程序的编写进行系统设计。选用编译效率最高的Keil 软件用汇编语言进行编程,并用proteus仿真。 关键词:LED 计算器 AT89C51芯片 74LS164
Calculator simulation system desig n Abstract:The design is a simple calculator based on 51 series microcontroller system design, to complete the calculator keyboard input, add, subtract, multiply, and in addition to three unsigned numeric simple four operations, and the corresponding result will be displayed on the LED. The design process of hardware and software aspects of the synchronous design. Hardware choose AT89C51 microcontroller and 74ls164--enter the 4 × 4 matrix keyboard. Static display with five 7-segment common cathode LED display. Software calculator function from the analysis, flow charts, design, and then program the preparation of system design. Selected to compile the most efficient Keil software in assembly language programming, and with proteus simulation. Keywords: LED calculator AT89C51 chip 74LS164
电气工程学院 《电力系统分析综合实验》2017年度PSASP实验报告 学号: 姓名: 班级:
实验目的: 通过电力系统分析的课程学习,我们都对简单电力系统的正常和故障运行状态有了大致的了解。但电力系统结构较为复杂,对电力系统极性分析计算量大,如果手工计算,将花费 大量的时间和精力,且容易发生错误。而通过使用电力系统分析程序PSASP,我们能对电 力系统潮流以及故障状态进行快速、准确的分析和计算。在实验过程中,我们能够加深对电力系统分析的了解,并学会了如何使用计算机软件等工具进行电力系统分析计算,这对我们以后的学习和工作都是有帮助的。 潮流计算部分: 本次实验潮流计算部分包括使用牛顿法对常规运行方式下的潮流进行计算,以及应用PQ分解法规划运行方式下的潮流计算。在规划潮流运行方式下,增加STNC-230母线负荷的有功至1.5.p.u,无功保持不变,计算潮流。潮流计算中,需要添加母线并输入所有母线 的数据,然后再添加发电机、负荷、交流线、变压器、支路,输入这些元件的数据。对运行方案和潮流计算作业进行定义,就可以定义的潮流计算作业进行潮流计算。 因为软件存在安装存在问题,无法使用图形支持模式,故只能使用文本支持模式,所以 无法使用PSASP绘制网络拓扑结构图,实验报告中的网络拓扑结构图均使用Visio绘制, 请见谅。 常规潮流计算: 下图是常规模式下的网络拓扑结构图,并在各节点标注电压大小以及相位。 下图为利用复数功率形式表示的各支路功率(参考方向选择数据表格中各支路的i侧母
线至j侧),因为无法使用图形支持模式,故只能通过文本支持环境计算出个交流线功率,下图为计算结果。
汽车运动机构课程设计说明书 温州大学机电工程学院 2013年6月
机械原理设计说明书 题目:汽车转向机构 学院:机电工程学院 专业:汽车服务工程 班级:11汽车服务本 姓名:叶凌峰俞科王栋柄 王璐吴海霞欧阳凯强 学号:11113003233 11113003243 11113003199 11113003209 11113003218 11113003174指导老师:李振哲
目录 一.设计题目 (1) 1.1课程设计目的和任务 (1) 1.2课程设计内容与基本要求 (2) 1.3机构简介 ........................................................................ 错误!未定义书签。 1.4参考数据 (5) 1.5设计要求 (5) 二. 设计方案比较 (6) 2.1设计方案一 (6) 2.2设计方案二 (7) 2.3设计方案三 (8) 2.4最终设计方案 ................................................................ 错误!未定义书签。 三.虚拟样机实体建模与仿真 (9) 四.虚拟样机仿真结果分析 (10) 4.1运动学仿真 (11) 4.1.1运动学仿真--转向盘位移仿真曲线 (11) 4.1.2运动学仿真--轮胎位移仿真曲线 (11) 4.1.3运动学仿真--转向盘速度仿真曲线 (12) 4.1.4运动学仿真--轮胎速度仿真曲线 (12) 4.1.5运动学仿真--转向盘加速度仿真曲线 (13) 4.1.6运动学仿真--轮胎加速度仿真曲线 (13) 4.2动力学分析 (14) 4.2.1转向盘受力仿真曲线 (14) 4.2.2轮胎受力仿真曲线 (14) 五. 课程设计总结 (15) 5.1机械原理课程设计总结 (15) 5.2设计过程 (15) 5.3设计展望 (16) 5.4设计工作分工表 (16) 5.5参考文献 (16)
报告: 张昌世 自动化091 109031027 小组成员:刘锋 自动化091 109031023 陈奇英 自动化091 109031001 彭桂贤 自动化091 109031002 指导老师:陈才 摘要: 课题: 嵌 入式课程设计 基于 uCOS/uCGUI 的模拟计算器实现
计算器这一小小的程序机器实际上是从计算机中割裂出来的衍生品,但因其方便快捷的操作模式,已经被广泛应用于工程、学习、商业等日常生活中,极大的方便了人们对于数字的整合运算。现今的计算器已经不仅仅停留在传统的硬件上,而是越来越软件化,它可以在手机里,在电脑上,在许许多的的电子产品上。所以有必要在自己平时学习的开发板上做个带界面显示的计算器来证明下自己的能力。 引言: 简单的计算器包括0~9的数字输入键,小数点输入键,+、-*、人=运算键等,还可以 加入其他运算:如三角运算(sin, cos,ta n,cot等),一些当木运算(平方,开方,阶乘等)。由于条件和能力有限,所以就做个能实现四则运算的简易计算器。 计算器的程序设计实际上富有一定的难度,虽然乍一想很简单,只要实现下加减乘除运算,然后显示出来就可以了,但实际上运算结果跟图像界面的数据交换,还有浮点数的处理等都很折腾人。通过本次设计,体会到了学习的不易,还有自己能力上的不足! 一、课题描述: 在STM32开发板上实现简易的计算器。计算器界面显示在TFT彩屏上,采用触摸屏 上模拟按钮来实现数据及运算符的输入。最后把运算的结果显示在彩屏。最基本要求:有加减乘除运算,有带小数点的运算。 二、课题分析 a)、硬件要求: 处理器选择:STM32F103ZE,这款处理器具有512K的flash,64K的RAM,足够大的空间,可以让程序员的可以有更大的发挥空间,而不用为节省空间而上脑筋。 TFT彩屏:带触摸的TFT彩屏,3.2寸,分辨为240*320的真彩彩屏。 JLink仿真器:使用JLink v8仿真器,仿真器能够下载程序、在线仿真,便于程序编写与错误检查。 b)、软件要求: 操作系统:使用uC/OS嵌入式实时操作系统。由于触屏要实时响应,所以需要使用操作系统,并给触屏专门建立一个任务。CPU其他的操作组成一个任务。程序在两个任务中相互切换。 图形软件:使用uCGUI嵌入式图形界面软件。uCGUI是个小型的图形软件,包括有基 本的图形显示,还有许多图形控件,如:按钮,编辑框,窗口,滚动条等等,而我们的计算器的制作就要用到其中的按钮、编辑框和窗口3个控件。 固件库:STM32编程,可以使用固件库,ST公司提供STM32处理器的固件库,以方 便程序员编程,缩短了项目的编程周期。 C)、设计方案: 界面布局: 1 个编辑框:位于彩屏左上角,占整屏的1/5 左右,用于数据输入显示,运算符的输
课程设计报告 学生姓名:学号: 学院:电气工程学院 班级: 题目: 电力系统潮流计算 职称: 副教授 指导教师:李翠萍职称: 副教授 2014年 01月10日
1 潮流计算的目的与意义 潮流计算的目的:已知电网的接线方式与参数及运行条件,计算电力系统稳态运行各母线电压、个支路电流与功率及网损。对于正在运行的电力系统,通过潮流计算可以判断电网母线电压、支路电流和功率是否越限,如果有越限,就应采取措施,调整运行方式。对于正在规划的电力系统,通过潮流计算,可以为选择电网供电方案和电气设备提供依据。潮流计算还可以为继电保护和自动装置定整计算、电力系统故障计算和稳定计算等提供原始数据。 潮流计算的意义: (1)在电网规划阶段,通过潮流计算,合理规划电源容量及接入点,合理规划网架,选择无功补偿方案,满足规划水平的大、小方式下潮流交换控制、调峰、调相、调压的要求。 (2)在编制年运行方式时,在预计负荷增长及新设备投运基础上,选择典型方式进行潮流计算,发现电网中薄弱环节,供调度员日常调度控制参考,并对规划、基建部门提出改进网架结构,加快基建进度的建议。 (3)正常检修及特殊运行方式下的潮流计算,用于日运行方式的编制,指导发电厂开机方式,有功、无功调整方案及负荷调整方案,满足线路、变压器热稳定要求及电压质量要求。 (4)预想事故、设备退出运行对静态安全的影响分析及作出预想的运行方式调整方案。 2 潮流计算数学模型 1.变压器的数学模型: 变压器忽略对地支路等值电路:
2.输电线的数学模型: π型等值电路: 3 数值方法与计算流程 利用牛顿拉夫逊法进行求解,用MATLAB 软件编程,可以求解系统潮流分 布根据题目的不同要求对参数进行调整,通过调节变压器变比和发电厂的电压,求解出合理的潮流分布,最后用matpower 进行潮流分析,将两者进行比较。 牛顿—拉夫逊法 1、牛顿—拉夫逊法概要 首先对一般的牛顿—拉夫逊法作一简单的说明。已知一个变量X 函数为: 0)(=X f 到此方程时,由适当的近似值) 0(X 出发,根据: ,......)2,1() ()() ()() () 1(='-=+n X f X f X X n n n n 反复进行计算,当) (n X 满足适当的收敛条件就是上面方程的根。这样的方 法就是所谓的牛顿—拉夫逊法。 这一方法还可以做下面的解释,设第n 次迭代得到的解语真值之差,即) (n X 的误差为ε时,则: 0)()(=+εn X f 把)() (ε+n X f 在) (n X 附近对ε用泰勒级数展开 0......)(! 2)()()()(2 )() () (=+''+ '+=+n n n n X f X f X f X f εεε 上式省略去2ε以后部分 0)()()()(≈'+n n X f X f ε
汽车转向系统总结报告 本节课首先讲述了转向系概述,包括其定义、功用、分类、组成、转向理论。 一、定义 驾驶员用来改变或恢复汽车行驶方向的机构称为汽车转向系统。改变或恢复行驶方向的方法是,驾驶员通过一套专设的机构,使汽车的转向桥上的车轮相对于汽车纵轴线偏转一定角度。 二、功用 遵从驾驶员的操纵,改变汽车行驶方向,并和汽车行驶系共同保证汽车机动灵活、稳定安全地行驶。 三、分类 机械转向系:以驾驶员施加于转向盘上的体力为转向能源。 动力转向系:兼用驾驶员体力和发动机部分动力为转向能源。 转向装置的作用有三点: 1、增大驾驶员作用力 2、改变运动方向 3、把转动变为摆动 接着讲述了转向器的作用及要求、分类、结构。 作用:改变力的传递方向和大小,并获得所要求的摆动速度和角度,进而通过传动机构带动转向车轮偏转。 要求: 省力、灵活 稳定 传给转向器的反冲力尽可能小,又能自动回正 有间隙调整装置,保证自由行程在规定范围 分类:蜗杆齿扇式转向器,循环球式转向器,蜗杆曲柄双销式转向器,齿轮齿条转向器。 重点讲述了转向器的工作原理! 转向系统的设计、制造所需知识包含在哪些课程中呢? 机械原理机械制造基础机械设计机械制造工程学 高等数学等等等 可见转向系统的设计极其制造需要依赖很多门课程的知识,同时也反应了转向系统是很复杂的,想要完成好转向系统的设计、制造,不是一件容易的事情,需要广阔的知识涉猎,才能又完成这项任务资格! 对于未来的转向系统又有如何的发展趋势呢? 传统的汽车转向系统是机械式的转向系统,汽车的转向由驾驶员控制方向盘,通过转向器等一系列机械转向部件实现车轮的偏转,从而实现转向。对于未来汽车的转向系统,动力转向是发展方向。动力转向主要是从减轻驾驶员疲劳,提高操作轻便性和稳定性出发。动力转向有3种形式:整体式,半分置式及联阀式动力转向结构。目前3种形式各有特点,发现较快,整体式多用于前桥负荷3~8t汽车。从发展趋势上看,国外整体式转向器发展较快,而整体式转向器中转阀结构是目前发展方向。 机制十二班康斌学号2013141411167
嵌 入 式 课 程 设 计 课题:基于uCOS/uCGUI的模拟计算器实现报告:张昌世自动化091 109031027 小组成员:刘锋自动化091 109031023 陈奇英自动化091 109031001 彭桂贤自动化091 109031002 指导老师:陈才
摘要: 计算器这一小小的程序机器实际上是从计算机中割裂出来的衍生品,但因其方便快捷的操作模式,已经被广泛应用于工程、学习、商业等日常生活中,极大的方便了人们对于数字的整合运算。现今的计算器已经不仅仅停留在传统的硬件上,而是越来越软件化,它可以在手机里,在电脑上,在许许多的的电子产品上。所以有必要在自己平时学习的开发板上做个带界面显示的计算器来证明下自己的能力。 引言: 简单的计算器包括0~9的数字输入键,小数点输入键,+、-*、/、=运算键等,还可以加入其他运算:如三角运算(sin,cos,tan,cot等),一些当木运算(平方,开方,阶乘等)。由于条件和能力有限,所以就做个能实现四则运算的简易计算器。 计算器的程序设计实际上富有一定的难度,虽然乍一想很简单,只要实现下加减乘除运算,然后显示出来就可以了,但实际上运算结果跟图像界面的数据交换,还有浮点数的处理等都很折腾人。通过本次设计,体会到了学习的不易,还有自己能力上的不足! 一、课题描述: 在STM32开发板上实现简易的计算器。计算器界面显示在TFT彩屏上,采用触摸屏上模拟按钮来实现数据及运算符的输入。最后把运算的结果显示在彩屏。最基本要求:有加减乘除运算,有带小数点的运算。 二、课题分析 a)、硬件要求: 处理器选择:STM32F103ZE,这款处理器具有512K的flash,64K的RAM,足够大的空间,可以让程序员的可以有更大的发挥空间,而不用为节省空间而上脑筋。 TFT彩屏:带触摸的TFT彩屏,3.2寸,分辨为240*320的真彩彩屏。 JLink仿真器:使用JLink v8仿真器,仿真器能够下载程序、在线仿真,便于程序编写与错误检查。 b)、软件要求: 操作系统:使用uC/OS嵌入式实时操作系统。由于触屏要实时响应,所以需要使用操作系统,并给触屏专门建立一个任务。CPU其他的操作组成一个任务。程序在两个任务中相互切换。 图形软件:使用uCGUI嵌入式图形界面软件。uCGUI是个小型的图形软件,包括有基本的图形显示,还有许多图形控件,如:按钮,编辑框,窗口,滚动条等等,而我们的计算器的制作就要用到其中的按钮、编辑框和窗口3个控件。 固件库:STM32编程,可以使用固件库,ST公司提供STM32处理器的固件库,以方便程序员编程,缩短了项目的编程周期。 c)、设计方案:
目录 1.概述 (1) 1.1任务来源 (1) 1.2转向系统基本介绍 (1) 1.3转向系统结构简图 (1) 2.转向系统相关参数 (1) 3.最小转弯半径 (2) 4.转向系传动比的计算 (3) 5.转向系载荷的确定 (3) 5.1原地转向阻力矩 M (3) r 5.2车轮回正阻力矩Ms (3) 5.3作用在转向盘上的力 F (3) k 6.转向管柱布置的校核 (4) 6.1转向管柱布置角度的测量 (4) 6.2转向管柱角速度及力矩波动计算 (4) 6.3转向管柱固有频率要求 (7) 7.结论 (7) 参考文献................................................... 错误!未定义书签。
1.概述 1.1任务来源 根据6430车型设计开发协议书, 6430项目是一款全新开发的车型,需对转向系统进行设计计算。 1.2转向系统基本介绍 转向管柱为角度不可调式管柱,转向机采用结构简单、布置容易的齿轮齿条式转向机。 转向盘采用软发泡三辐式,轮辐中间有一块大盖板,打开时可拆装调整转向盘。 1.3转向系统结构简图 2.转向系统相关参数
轮胎规格为185R14LT ,层级为8。轮辋偏置距为+45mm ,负荷下静半径为304㎜,滚动半径约317mm ,满载下前胎充气压力240KPa 。 3.最小转弯半径 汽车的最小转弯半径是汽车在转向轮处于最大转角条件下以低速转弯时前外轮中心与地面接触点的轨迹构成圆周半径,它在汽车转向角达到最大时取得。 转弯半径越小,则汽车转向所需场地就愈小,汽车的机动性就越好。为了避免在汽车转向时产生的路面对汽车行驶的附加阻力和轮胎过快磨损,要求转向系能保证在汽车转向时,所有车轮应绕瞬时转向中心作纯滚动。此时,内转向轮偏转角β应大于外转向轮偏转角α,在车轮为绝对刚体的假设条件下,角α与β的理想关系式应是: L ctg ctg K +=βα 式中: K —两侧主销轴线与地面相交点之间的距离; L —轴距。 3.1按外轮最大转角 C L R += α sin 1 =5194.9(mm ) 3.2按内轮最大转角 C KL K L R +++=2 1 222]tan 2)sin [(ββ =5912.3(mm )
本科生实验报告 实验课程电力系统分析 学院名称核技术与自动化工程学院 专业名称电气工程及其自动化 学生姓名 学生学号 指导教师顾民 实验地点6C901 实验成绩
二〇一五年十月——二〇一五年十二月 实验一MATPOWER软件在电力系统潮流计算中的应用实例 一、简介 Matlab在电力系统建模和仿真的应用主要由电力系统仿真模块(Power System Blockset 简称PSB)来完成。Power System Block是由TEQSIM公司和魁北克水电站开发的。PSB是在Simulink环境下使用的模块,采用变步长积分法,可以对非线性、刚性和非连续系统进行精确的仿真,并精确地检测出断点和开关发生时刻。PSB程序库涵盖了电路、电力电子、电气传动和电力系统等电工学科中常用的基本元件和系统仿真模型。通过PSB可以迅速建立模型,并立即仿真。PSB程序块程序库中的测量程序和控制源起到电信号与Simulink程序之间连接作用。PSB程序库含有代表电力网络中一般部件和设备的Simulink程序块,通过PSB 可以迅速建立模型,并立即仿真。 1)字段baseMVA是一个标量,用来设置基准容量,如100MVA。 2)字段bus是一个矩阵,用来设置电网中各母线参数。 ①bus_i用来设置母线编号(正整数)。 ②type用来设置母线类型, 1为PQ节点母线, 2为PV节点母线, 3为平衡(参考)节点母线,4为孤立节点母线。 ③Pd和Qd用来设置母线注入负荷的有功功率和无功功率。 ④Gs、Bs用来设置与母线并联电导和电纳。 ⑤baseKV用来设置该母线基准电压。 ⑥Vm和Va用来设置母线电压的幅值、相位初值。 ⑦Vmax和Vmin用来设置工作时母线最高、最低电压幅值。 ⑧area和zone用来设置电网断面号和分区号,一般都设置为1,前者可设置范围为1~100,后者可设置范围为1~999。 3)字段gen为一个矩阵,用来设置接入电网中的发电机(电源)参数。 ①bus用来设置接入发电机(电源)的母线编号。 ②Pg和Qg用来设置接入发电机(电源)的有功功率和无功功率。 ③Pmax和Pmin用来设置接入发电机(电源)的有功功率最大、最小允许值。 ④Qmax和Qmin用来设置接入发电机(电源)的无功功率最大、最小允许值。 ⑤Vg用来设置接入发电机(电源)的工作电压。 1.发电机模型 2.变压器模型 3.线路模型 4.负荷模型 5.母线模型 二、电力系统模型 电力系统中输送和分配电能的部分称为电力网,它包括升降压变压器和各种电压等级的输电线路、动力系统、电力系统和电力网简单示意如图
标题 转向系统设计与优化 摘要 汽车在行驶过程中,需要按照驾驶员的意志经常改变行驶方向,即所谓汽车转向。用来改变或保持汽车行驶方向的机构称为汽车转向系统。汽车转向系统的功能就是按照驾驶员的意愿控制汽车的行驶方向。汽车转向系统对汽车的行驶安全是至关重要的。因此需要对转向系统进行优化,从而使汽车操作起来更加方便、安全。本次设计是EPS电动转向系统,即电动助力转向系统。该系统是由一个机械系统和一个电控的电动马达结合在一起而形成的一个动力转向系统。EPS系统主要是由扭矩传感器、电动机、电磁离合器、减速机构和电子控制单元等组成。驾驶员在操纵方向盘进行转向时,转矩传感器检测到转向盘的转向以及转矩的大小,将电压信号输送到电子控制单元,电子控制单元根据转矩传感器检测到的转距电压信号、转动方向和车速信号等,向电动机控制器发出指令,使电动机输出相应大小和方向的转向助力转矩,从而产生辅助动力。汽车不转向时,电子控制单元不向电动机控制器发出指令,电动机不工作。该系统由电动助力机直接提供转向助力,省去了液压动力转向系统所必需的动力转向油泵、软管、液压油、传送带和装于发动机上的皮带轮,既节省能量,又保护了环境。另外,还具有调整简单、装配灵活以及在多种状况下都能提供转向助力的特点。因此,电动助力转向系统是汽车转向系统的发展方向。 关键词:机械系统,扭矩传感器,电动机,电磁离合器,减速机构,电子控制单元。 概述 汽车在行使过程中,需要经常改变行驶方向,即所谓的转向。这就需要有一套能够按照司机意志来改变或恢复汽车行驶方向的专设机构,它将司机转动方向盘的动作转变为车轮的偏转动作,这就是所谓的转向系统。转向系统是用来改变汽车的行使方向和保持汽车直线行使的机构,既要保持车辆沿直线
1. 手算过程 已知: 节点1:PQ 节点, s(1)= -0.5000-j0.3500 节点2:PV 节点, p(2)=0.4000 v(2)=1.0500 节点3:平衡节点,U(3)=1.0000∠0.0000 网络的连接图: 0.0500+j0.2000 1 0.0500+j0.2000 2 3 1)计算节点导纳矩阵 由2000.00500.012j Z += ? 71.418.112j y -=; 2000.00500.013j Z += ? 71.418.113j y -=; ∴导纳矩阵中的各元素: 42.936.271.418.171.418.1131211j j j y y Y -=-+-=+=; 71.418.11212j y Y +-=-=; 71.418.11313j y Y +-=-=; =21Y 71.418.11212j y Y +-=-=; 71.418.12122j y Y -==; 002323j y Y +=-=; =31Y 71.418.11313j y Y +-=-=; =32Y 002323j y Y +=-=; 71.418.13133j y Y -==; ∴形成导纳矩阵B Y : ?? ?? ? ?????-++-+-+-+-+--=71.418.10071.418.10071.418.171.418.171.418.171.418.142.936.2j j j j j j j j j Y B 2)计算各PQ 、PV 节点功率的不平衡量,及PV 节点电压的不平衡量: 取:000.0000.1)0(1)0(1)0(1j jf e U +=+= 000.0000.1)0(2) 0(2)0(2j jf e U +=+= 节点3是平衡节点,保持000.0000.1333j jf e U +=+=为定值。 ()()[] ∑==++-=n j j j ij j ij i j ij j ij i i e B f G f f B e G e P 1 )0()0()0()0()0()0() 0(;
标准计算器的设计 一、设计思想: .创建3个字符串显示控件num1,num2,num3,其中: 1、第一个输入数据存储在num1中 2、第二个输入数据存入num2中 3、将其赋给 num3,并使num2为空,以便输入的数据存入num2 4、所有的运算是在num1和 num3间进行 5、运算结果都赋给result,同时赋给num1,用于下一次的运算 .创建4个布尔开关按钮change,change1,change2,change3,其中: 1、Change的真假用来判断是第一个数据还是第二个数据 2、change1的功能是在输入=,运算完后,不需要初始化即可进行下一次运算 3、change2用来去掉数据小数末尾的0 4、change3用来保证backspace键仅对输入的数据有效,对运算结果无效 .创建2个数值显示控件type1,type2,并分别在其后面板的属性——数据类型——表示法中选择U8其中: 1、type1用来存储运算符号 2、type2用来保证连续“+、-、*、/”的正确性 3、所有的运算结果都赋给result 4、result经过去零处理后得到result1,将数据显示在前面板上。 二、实现过程 1、面板按键的设计及感应 首先,在前面板上建立一个簇 然后在簇中再建立布尔量,复制20个以满足键的需求(0--9十个数字键,一个小数点键,一个等号键,四则运算键,一个开方键,一个倒数键,一个反号键,一个清零键及一个退出键并注意按键的顺序)。 将按键给值并作适当的美化处理
在后面板中通过将簇中元素按产生的顺序组成一个一维数组,这样就实现了每 个键与数字(0--20)之间的对应。每次按下一个键时,通过查找出对应的键并把结果(对应的数字)连接到一个case结构,然后执行对应case结构中的程序,至此就完成了对
密级:版本/更改状态:第一版/0 编号: 长城汽车股份有限公司技术文件 CC6460K/KY 转向系统设计计算书 编制: 审核: 审定: 批准: 长城汽车股份有限公司 二OO四年四月十五日
目录 1 系统概述????????????????????????????????????????????????????????????????????????????????????????????????????????????????1 2 转向系统设计依据的整车参数计设计要求????????????????????????????????????????????????????????2 3 转向系统设计过程????????????????????????????????????????????????????????????????????????????????????????????????2 3.1 最小转弯半径计算?????????????????????????????????????????????????????????????????????????????????????????2 3.2 转向系的角传动比计算?????????????????????????????????????????????????????????????????????????????????3 3.3 转向系的力传动比计算?????????????????????????????????????????????????????????????????????????????????3 3. 4 转向系的内外轮转角?????????????????????????????????????????????????????????????????????????????????????4 3. 5 液压系统的匹配计算?????????????????????????????????????????????????????????????????????????????????????5 3.5.1 转向油泵流量的计算??????????????????????????????????????????????????????????????????????????5 3.5.2 转向油泵压力的变化??????????????????????????????????????????????????????????????????????????6 4 结论说明????????????????????????????????????????????????????????????????????????????????????????????????????????????????7 5 参考文献????????????????????????????????????????????????????????????????????????????????????????????????????????????????8
郑州科技学院 《单片机原理及应用》课程设计 题目基于单片机简易设计与实现 学生姓名 专业班级 学号 院(系) 指导老师 完成时间年月日
目录 0.引言 (1) 1. 设计方案 (3) 1.1 方案论证 (3) 1.2 方案比较与选择 (4) 2. 系统设计 (4) 2.1系统组成及总体框图 (5) 2.2硬件原理 (5) 2.2.1.单片机最小系统 (6) 2.2.2键盘电路 (14) 2.2.3显示电路 (16) 2.3.软件流程 (18) 2.3.1主程序控制流程 (18) 2.3.2键盘扫描子程序 (19) 2.3.3LCD1602显示控制流程 (21) 2.4仿真与实物制作 (26) 3.结论 (27) 参考文献 (28) 附录一:总体电路原理图 (29)
附录二: 元器件 (29) 附录三:源程序 (30)
基于单片机简易设计与实现 0.引言 随着社会的发展,科学的进步,人们的生活水平在逐步的提高,尤其是微电子技术的发展,犹如雨后春笋般的变化。电子产品的更新速度快就不足惊奇了。计算器在人们的日常中是比较的常见的电子产品之一。如何使计算器技术更加的成熟,充分利用已有的软件和硬件条件,设计出更出色的计算器,使其更好的为各个行业服务,成了如今电子领域重要的研究课题[1]。 今天,人们的日常生活中已经离不开计算器了,社会的各个角落都有它的身影,比如商店,办公室,学校……。因此设计一款简单实用的计算器会有很大的实际意义。 本设计对字符液晶显示模块的工作原理,如初始化、清屏、显示、调用及外特性有较清楚的认识,并会使用LCD(液晶显示模块)实现计算结果的显示;掌握液晶显示模块的驱动和编程,设计LCD和单片机的接口电路,以及利用单片机对液晶模块的驱动和操作;在充分分析内部逻辑的概念,进行软件和调试,学会使用,并能够以其为平台设计出具有四则运算能力简易计算器的硬件电路和软件程序。 同时在进一步掌握单片机理论知识,理解嵌入式单片机系统的硬软件设计,加强对实际应用系统设计的能力。通过本设计的学习,使我掌
(理工类) 课程名称:电力系统分析专业班级: 学生学号:学生姓名: 所属院部:机电工程学院指导教师: 20 15 ——20 16 学年第 2 学期 金陵科技学院教务处制
实验一电力系统分析计算 实验项目名称:电力系统分析计算实验学时: 4 同组学生姓名:无实验地点: 2334 实验日期:实验成绩: 批改教师:批改时间: 一.实验目的 1.掌握用Matlab软件编程计算电力系统元件参数的方法. 2.通过对不同长度的电力线路的三种模型进行建模比较,学会选取根据电路要求选取模 型。 3.掌握多级电力网络的等值电路计算方法。 4.理解有名制和标幺制。 二.实验内容 1.电力线路建模 有一回220kV架空电力线路,导线型号为LGJ-120,导线计算外径为15.2mm,三相导 线水平排列,两相邻导线之间的距离为4m。试计算该电力线路的参数,假设该线路长度分 别为60km,200km,500km,作出三种等值电路模型,并列表给出计算值。 2.多级电力网络的等值电路计算 部分多级电力网络结线图如图1-1所示,变压器均为主分接头,作出它的等值电路模型, 并列表给出用有名制表示的各参数值和用标幺制表示的各参数值。 线路额定电压电阻 (欧/km) 电抗 (欧/km) 电纳 (S/km) 线路长度 (km) L1(架空线)220kv 0.08 0.406 2.81*10-6 200 L2(架空线)110kV 0.105 0.383 2.81*10-6 60 L3(架空线)10kV 0.17 0.38 忽略15 变压器额定容量P k(kw) U k% I o% P o(kW) T1 180MVA 893 13 0.5 175 T2 63MVA 280 10.5 0.61 60 三.实验设备 1.PC一台 2.Matlab软件
(完整)基于51单片机的简易计算器设计 编辑整理: 尊敬的读者朋友们: 这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望((完整)基于51单片机的简易计算器设计)的内容能够给您的工作和学习带来便利。同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。 本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为(完整)基于51单片机的简易计算器设计的全部内容。
基于单片机的简易计算器设计 摘要 (3) 关键字:80C51 LCD1602 4*4矩阵键盘计算器 (3) 第一章绪论 (4) 1.1 系统开发背景 (4) 1.2 系统开发意义 (4) 1.3 设计目的 (4) 1。4 设计任务 (4) 第二章单片机发展现状 (5) 2。1 目前单片机的发展状况 (5) 2。1。1单片机的应用场合 (6) 2。2 计算器系统现状 (6) 2.3 简易计算器系统介绍 (6) 第三章系统硬件设计及说明 (7) 3。1 系统组成及总体框图 (8) 3.2 AT89S52单片机介绍 (8) 3.3 其它器件介绍及说明 (10) 3.3.1 LCD1602液晶显示 (10) 3.3。2 4*4矩阵扫描按键 (13) 第四章 PROTEUS模拟仿真 (14) 第五章系统硬件设计及说明 (16) 第六章软件设计 (17) 6.1 汇编语言和C语言的特点及选择 (17) 6。2 源程序代码 (17)
摘要 近年来随着科技的飞速发展,单片机的应用正在不断深入,同时带动传统控制检测技术日益更新。在实时检测和自动控制的单片机应用系统中,单片机往往作为一个核心部件来使用,但仅单片机方面的知识是不够的,还应根据具体硬件结构、软硬件结合,来加以完善。 计算机在人们的日常生活中是比较常见的电子产品之一.可是它还在发展之中,以后必将出现功能更加强大的计算机,基于这样的理念,本次设计主要以80C51单片机为控制芯片,用C语言进行编程实现,通过4*4矩阵键盘控制,输出用液晶屏LCD1602显示,该计算器可以实现一般的加减乘除四则混合运算。 关键字:80C51 LCD1602 4*4矩阵键盘计算器
1 转向系统的功能 1.1 驾驶者通过方向盘控制转向轮绕主销的转角而实现控制汽车运动方向。 对方向盘的输入有两种方式:对方向盘的角度输入和对方向盘的力输入。装有动力转向系统的汽车低速行驶时,操作方向盘的力很轻,却要产生很大的方向盘 转角输入,汽车的运动方向纯粹是由转向系统各杆件的几何关系所确定。这时, 基本上是角输入。而在高速行驶时,可能出现方向盘转角很小,汽车上仍作用有 一定的侧向惯性力,这时,主要是通过力输入来操纵汽车。 1.2 将整车及轮胎的运动、受力状况反馈给驾驶者。这种反馈,通常称为路感。 驾驶者可以通过手—---感知方向盘的震动及运转情况、眼睛—---观察汽车运动、 身体—---承受到的惯性、耳朵—---听到轮胎在地面滚动的声音来感觉、检测汽车 的运动状态,但最重要的的信息来自方向盘反馈给驾驶者的路感,因此良好的路 感是优良的操稳性中不可缺少的部分。 反馈分为力反馈和角反馈 从转向系统的功能可以得知:人、车通过转向系统组成了人车闭环系统,是驾驶者对汽车操纵控制的一个关键系统。 2 转向系统设计的基本要求 转向系是用来保持或者改变汽车行驶方向的机构,在汽车转向行驶时,保证各转向轮之间有协调的转角关系。转向系的基本要求如下: 2.1 汽车转弯时,全部车轮应绕瞬时回转中心(瞬心)旋转,任何车轮不应有侧滑。 不满足这项要求会加剧轮胎磨损,并降低汽车的操作稳定性。实际上,没有哪 一款汽车能完全满足这项要求,只能对转向梯形杆系进行优化,一般在常用转向 角内(内轮15°~25°范围)使转向内外轮运动关系逼近上述要求。 2.2 良好的回正性能 汽车转向动作完成后,在驾驶者松开方向盘的条件下,转向轮能自动返回到直线行驶位置,并稳定行驶。转向轮的回正力矩的大小主要由悬架系统所决定的前 轮定位参数确定,一般来说,影响汽车回正的因素有:轮胎侧偏特性、主销内倾 角、主销后倾角、前轮外倾、转向节上下球节的摩擦损失、转向节臂长、转向系 统的逆效率等。 2.3汽车在任何行驶状态下,转向轮不得产生自振,方向盘没有摆动。 2.4 转向机构与悬架机构的运动不协调所造成的运动干涉应尽可能小,由于运动干涉使转向轮产生的摆动应最小。 汽车转弯行驶时,作用在汽车质心处的离心力的作用,内轮载荷减小,外轮载荷增加,使悬架上的载荷发生相应变化。若转向桥采用非独立悬架、钢板弹簧机
课程设计报告 ( 2014—2015年度第二学期) 名称:电力系统暂态上机计算院系:电气与电子工程学院班级:电气1211 学号:1121210205 学生:郝阳 指导教师:艳波 设计周数:两周 成绩: 日期:2015年7月4日
一、课程设计的目的与要求 巩固电力系统暂态分析理论知识,使学生掌握采用计算机对电力系统电磁暂态过程和机电暂态过程进行计算的基本方法,并进一步巩固计算机编程能力,为将来从事相关的技术工作打下必要的基础。 二、设计正文(详细容见附录,用A4纸,页数不限) 1.对称短路计算过程流程图和计算结果 2.不对称短路计算过程流程图和计算结果 3.静态稳定性计算过程流程图和计算结果 4.暂态稳定性计算过程流程图和计算结果 5.思考题 三、课程设计总结或结论 本次电力系统暂态上机主要讨论了计算各种类型短路故障下系统网络中的电压电流分布以及电力系统的静态稳定、暂态稳定问题。通过本次课程设计,本人对电力系统故障分析有了更深刻的理解,电力系统的故障时,大部分电磁量将随时间变化,描述其特性的是微分方程,这给分析计算带来一定困难。在分析过程常尽量避免对微分方程直接求解,而是采用一定的工具和假设使问题得以简化,即把“微分方程代数化,暂态分析稳态化”。在分析不对称故障时,各相之间电磁量的耦合使问题的分析更为复杂,此时常用的分析方法是采用对称分量法将不对称问题转化为对称问题来求解。同时我对用来分析电力系统静态稳定的试探法,用来分析电力系统暂态稳定的改进欧拉法有了一些使用心得。这与手算系统短路电流时使用的网络化简方法大大不同。 在学习中,参照潮流程序,我加深了对节点导纳矩阵建立方法的理解与学习,巩固了不同类型短路的短路电流计算方法,和序电压、序电流,相电压、相电流基于matlab软件的计算。利用小干扰分析法判别静态稳定可以使用劳斯判据,也可以使用特征根判别的方法。二者都能够判断,在书中的例题中使用的是劳斯判据,但是,特征根判别放法更适合在matlab软件的环境下使用,因为该软件提供了计算矩阵特征根的函数,使用起来简便易懂。利用改进欧拉法计算最大切除角或切除时间虽然比较方便,但是由于计算机有效位数的限制而引起的舍入误差随步长的减小以及运算次数的增多而增大。在上机编程中体会比较深的是自己犯的几个错误,比如说在算短路电流时,发电机之路的电流和电压是否要经过相位的变换,在静态稳定计算中的角度是弧度制,在计算中使用的都是标幺值等等,这些看似细微的地方,往往考验的就是自己对电力系统分析中的知识的基础,虽然小但是也非常的重要,往往就是这些错误会令程序得不到正确的结果,值得我注意和反思。 总的来说,结合我们上学期潮流上机编程的经验,虽然这次用的是matlab,但是明显感觉到对计算机处理电力系统问题的简便,程序的编写也显得更加的轻松和得心应手,体会到matlab软件的强大。经过两个星期的回顾与学习,我巩固了电力系统暂态分析理论知识,在编程的过程中很深刻的感受到要想得出正确的结果,就必须认真地理解课本上对应的例题,知道这些原理,不能仅仅照着书抄公式;同时我也初步掌握了采用计算机对电力系统电磁暂态过程和机电暂态过程进行计算的基本方法,并进一步巩固计算机编程能力,为将来从事相关的技术工作打下必要的基础,更好地建设我国的电力系统。 四、参考文献 1.《电力系统暂态过程》,常鲜戎、书强编,机械工业,2010年1月,第一版; 2.《电力系统分析基础》,庚银,机械工业,2011年,第一版;