LMCSS参数翻译(完成版)
- 格式:pdf
- 大小:243.51 KB
- 文档页数:13
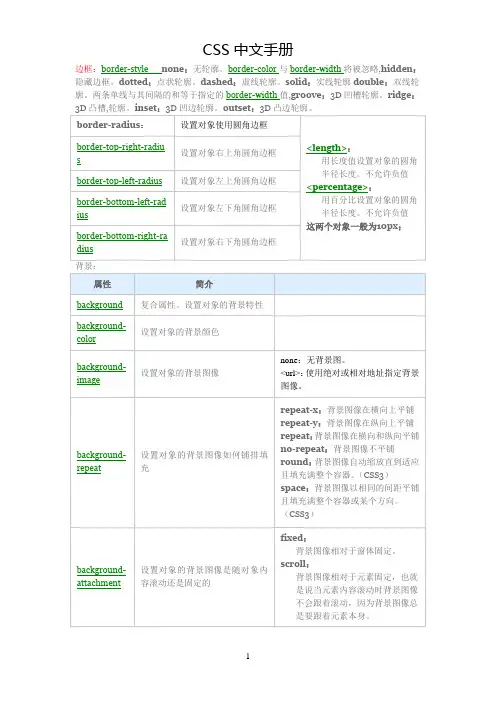
边框:border-style none :无轮廓。
border-color 与border-width 将被忽略,hidden :隐藏边框。
dotted :点状轮廓。
dashed :虚线轮廓。
solid :实线轮廓double :双线轮廓。
两条单线与其间隔的和等于指定的border-width 值,groove :3D 凹槽轮廓。
ridge :3D 凸槽,轮廓。
inset :3D 凹边轮廓。
outset :3D 凸边轮廓。
border-radius : 设置对象使用圆角边框 <length>:用长度值设置对象的圆角半径长度。
不允许负值 <percentage>:用百分比设置对象的圆角半径长度。
不允许负值 这两个对象一般为10px ;border-top-right-radiu s设置对象右上角圆角边框 border-top-left-radius 设置对象左上角圆角边框 border-bottom-left-rad ius设置对象左下角圆角边框border-bottom-right-ra dius 设置对象右下角圆角边框背景:属性 简介background 复合属性。
设置对象的背景特性 background-color 设置对象的背景颜色background-image设置对象的背景图像none :无背景图。
<url>:使用绝对或相对地址指定背景图像。
background-repeat 设置对象的背景图像如何铺排填充repeat-x :背景图像在横向上平铺 repeat-y :背景图像在纵向上平铺 repeat :背景图像在横向和纵向平铺 no-repeat :背景图像不平铺 round :背景图像自动缩放直到适应且填充满整个容器。
(CSS3)space :背景图像以相同的间距平铺且填充满整个容器或某个方向。
(CSS3)background-attachment 设置对象的背景图像是随对象内容滚动还是固定的fixed :背景图像相对于窗体固定。
六、 DW4中CSS属性详解在Dreamweaver4的CSS样式里包含了W3C规范定义的所有CSS1的属性,Dreamweaver4把这些属性分为Type(类型)、Background(背景)、Block(块)、Box(盒子)、Border(边框)、 List(列表)、Positioning(定位)、Extensions (扩展)八个部分,如下图,下面我们分别详细讲解。
1. Type(类型)Type面板主要是对文字的字体,大小,颜色,效果等基本样式进行设置。
设置时,我们只对要改变的属性进行设置,没有必要改变的属性就空着。
注意:属性名带*号的是指样式效果不能在编辑文档时显示,要用浏览器打开才能看到效果。
Font:设置字体系列。
什么叫字体系列呢?是指对文字设定几个字体,当遇到第一个字体不能显示的文字时会自动用系列中的第二个字体或后面的字体显示。
相对应的CSS属性是”font-family”。
注意:Dreamweaver4已经内置设定了6个系列的英文字体,一般英文字体我们用“Verdana, Arial, Helvetica, sans-serif”这个系列比较好看。
如果不用这些字体系列,你就需要自己编辑字体系列,你可以通过下拉框最下面的“Edit Font List”来创建新的字体系列,也可以直接手动在下拉框里写字体名,字体之间用逗号隔开。
中文网页默认字体是宋体,一般就空着不要选取任何字体。
Size:定义文字的大小。
你可以通过选取数字和度量单位来选择具体的字体大小,或者你也可以选择一个相对的字体大小。
最好使用Pixels作为单位,这样不会在浏览器中文本变形。
一般小字体用比较标准的12px。
相对应的CSS属性是”font-size”。
注意:CSS中长度的单位分绝对长度单位和相对长度单位,一般我们常用的绝对长度单位有:px:(象素)根据显示器的分辨率来确定长度。
pt:(字号)根据windows系统定义的字号大小来确定长度。
LMCSS安装参数表页数:Page 1 of 13 日期:2005/1Translated by:翻译: YAN JUN严 军Checked by: XU WEIBIN检查: 许 伟 斌Approved by:批准:WU PENG吴 鹏Motion Control Board With LMCSSInstallation ParametersLMCSS安装参数(翻译版)P1230314AAB09 January, 1997Otis document configuration number 80049WARNINGThe “Default value” specified for the parameters within this document are provided as a template for the contracting process. These settings do not always represent the default settings for a specific contract and; therefore, should not be used for that purpose.NONDISCLOSURE WARNINGThis work contains proprietary information and is the property of Otis Elevator Company. It is distributed only to those employees with a need to know the information and it may not be reproduced,LMCSS安装参数表页数:Page 2 of 13 日期:2005/1Translated by:翻译: YAN JUN严 军Checked by: XU WEIBIN检查: 许 伟 斌Approved by:批准:WU PENG吴 鹏disclosed, or distributed to any person outside the employ of Otis Elevator Company without written authorization from an officer thereof. Otis competitors, customers, former employees, retirees, members of the general public and consultants not bound by a written nondisclosure agreement are among those outside the employ of Otis. In the event that an employee in the possession of this work no longer needs the information, retires, resigns is terminated or laid off from Otis, or in the event that a person outside the employ of Otis comes into possession of this work, such employee or person should destroy the work or return it to Otis.Any unauthorized reproduction, disclosure, or distribution by an person of any portion of this work may be a breach of duty owed by such person to Otis Elevator Company and could result in damages actionable at law.PROHIBITION ON COPYINGAny unauthorized reproduction, disclosure, or distribution of copies by any person of any portion of this work may be a violation of Copyright Law of the United States of America and other countries, could result in the awarding of Statutory Damages of up to $100,000 (17 USC 504) for infringement and may result in further civil and criminal penalties. All rights reserved.LMCSS安装参数表页数:Page 3 of 13 日期:2005/1Translated by:翻译: YAN JUN严 军Checked by: XU WEIBIN检查: 许 伟 斌Approved by:批准:WU PENG吴 鹏Revision HistoryDate AuthorDescription05-Jul-96 H. Vela Original document - transfered from Spec 90 23-Aug-96 LH. Sim Modified for 300VF09-Jan-97 H. Vela Hong Kong Door Lock addition2005年1月18 日严军(BOEC)中文翻译LMCSS安装参数表页数:Page 4 of 13 日期:2005/1Translated by:翻译: YAN JUN严 军Checked by: XU WEIBIN检查: 许 伟 斌Approved by:批准:WU PENG吴 鹏TOP FLOOR Number of the Top Floor (<=Bottom Floor+53).顶层楼层号(〈=53〉BOTTOM FLOOR Number of the Bottom Floor (>=0).底层楼层号(>=0).COUNTRY AJC Country Identification (0=America 1=Japan 2=Germany).国家标志(0=美国,1=日本,2=德国)ENABLE ADO Advanced Door Opening Enable Function (0=Disable 1=Enable).是否允许提前开门(0=禁止,1=允许)ENABL RELEVEL NY Releveling Enable Function (0=Disable 1=Enable). 是否允许再平层(0=禁止,1=允许)ADV BRK LFT Advanced Brake Lift (0=Disable 1=Enable).是否提前打开抱闸(0=禁止,1=允许)DOOR TYPE Selection for DCSS (0=DISS 1=DO2000/HPDS).选择门系统类型(0=DISS门系统,1=DO2000/HPDS门系统)DRIVE TYPE Selection for DBSS (0=MSWL 1=MSVF 2=MSDD 3=VFHD).选择驱动系统类型(0=MSWL系统,1=MSVF系统,2=MSDD系统,3=VFHD系统)OCSS ICD version OCSS ICD Version (0=Version 3.3,4.0 1=Version 3.0).OCSS ICD版本号(0=3.3,4.0版本;1=3.0版本)CAR NON START [s] Car Non Start Time (DDP time).轿厢0速时间(DDP时间)MAN. DECEL TIME Maximum time to shutdown after Manual Run.手动运行的最大减速时间No. of DZ in 1LS Number of Door Zones insides 1LS Switch.在1LS开关内的门区数目No. of DZ in 2LS Number of Door Zones insides 2LS Switch.在2LS开关内的门区数目Abs oversp % NOR Normal Run’s Absolute Overspeed Percentage.正常运行时的绝对超速的百分比Abs oversp % INS Inspection Run’s Absolute Overspeed Percentage.检修运行时的绝对超速的百分比Abs oversp % REC Recover Run’s Absolute Overspeed Percentage.救援运行时的绝对超速的百分比Abs oversp % REI Reinitialize Run’s Absolute Overspeed Percentage.LMCSS安装参数表页数:Page 5 of 13 日期:2005/1Translated by:翻译: YAN JUN严 军Checked by: XU WEIBIN检查: 许 伟 斌Approved by:批准:WU PENG吴 鹏初始化运行时的绝对超速的百分比Abs oversp % JPSDO JPSDO Run’s Absolute Overspeed Percentage.JPSDO运行时的绝对超速的百分比Track err % NOR Normal Run’s Dictated and Measured Speed Difference.正常运行中指示速度和实测速度的误差百分比Track err % INS Inspection Run’s Dictated and Measured Speed Difference.检修运行中指示速度和实测速度的误差百分比Trach err % LOW Slow Run’s Dictated and Measured Speed Difference.慢速运行中指示速度和实测速度的误差百分比NTSD percent Percentage of Nominal Speed for NTSD Relay switching.NTSD继电器动所时的速度相对于额定速度的百分比ETSD percent Percentage of Nominal Speed for ETSD Relay switching.ETSD继电器动所时的速度相对于额定速度的百分比Enable ETSD NY Enable ETSD Relay (0= Disable 1=Enable).允许ETSD继电器(0=禁止,1=允许)PTR drop delay Prepare To Run Drop Delay Time (x10ms).准备运行释放继电器时间(x10ms).max# Abs overspd Maximum no. of Absolute Overspeed Faults.绝对超速故障的最大故障数max# track. retry Maximum no. of Tracking Faults.跟踪故障的最大故障数max# NTSD faults Maximum no. of NTSD Faults.NTSD故障的最大故障数max# ETSD faults Maximum no. of ETSD Faults.ETSD故障的最大的故障数max# tract. loss Maximum no. of Traction Loss Faults.跟踪丢失故障的最大故障数max# UX DX fault Maximum no. of UX/DX Relay Faults.UX/DX继电器故障的最大故障数max# Pos faults Maximum no. of Position Faults.位置故障的最大故障数max# PVT faults Maximum no. of Primary Velocity Transducer Faults.第一速度传感器故障的最大故障数max# ADO retries Maximum no. of Advanced Door Opening Retry Faults.LMCSS安装参数表页数:Page 6 of 13 日期:2005/1Translated by:翻译: YAN JUN严 军Checked by: XU WEIBIN检查: 许 伟 斌Approved by:批准:WU PENG吴 鹏提前开门继电器故障的最大故障数max# EES faults Maximum no. of EES Faults.EES故障的最大故障数max# rdyrun tout Maximum no. of Ready To Run Timeouts.准备运行超时的最大记录数max# brake tout Maximum no. of Brake Lifted Timeouts.抱闸打开超时的最大记录数max# adv brk flt Maximum no. of Advanced Brake Faults.提前打开抱闸故障的最大故障数max# drive fault Maximum no. of Drive Faults.驱动故障的最大故障数max# unsafe start Maximum no. of Unsafe To Start Faults.不安全的启动故障的最大故障数max# DBD faults Maximum no. of DBD input Errors.DBD输入错误的最大故障数max# relevel runs Maximum no. of Releveling Runs between Normal Runs.在正常运行中再平层运行的最大记录数measure task no. Task Number for Run Time Measurement.运行时间中记录的任务数Relay delay time Relay Delay after feedback indicates U or D is energized (x10ms).U/D继电器自吸合至反馈回信号的延迟时间(x10ms).VHF CNS test Car non start test for VFHydro (0=Normal Mode 1= CNS Test Mode).变频液压梯的轿厢0速测试(0=正常模式,1=CNS测试模式)PreJerk Ramp Dlt Δ(Initial Velocity) to increment Per 20ms cycle.Δ(初始速度)每20ms一周期的增量PreJerk Ramp Cyc Number of 20ms cycles to increment the Initial Velocity.初始速度每20ms一周期的增量累计次数En Pre-Jerk Vel Prejerkin Stiction handling Enable Function (0=Disable 1=Enable).是否允许预加加速功能(0=禁用,1=允许)VELOCITY NORMAL Nominal Velocity for Normal Run.正常运行的额定速度ACCELERA NORMAL Nominal Acceleration for Normal Run.正常运行的额定加速度JERK NORMAL Nominal Jerk for Normal Run.LMCSS安装参数表页数:Page 7 of 13 日期:2005/1Translated by:翻译: YAN JUN严 军Checked by: XU WEIBIN检查: 许 伟 斌Approved by:批准:WU PENG吴 鹏正常运行的额定加加速度VELOCITY INSPECT Nominal Velocity for Inspection Run.检修运行的额定速度ACCELERA INSPECT Nominal Acceleration for Inspection Run.检修运行的额定加速度VELOCITY LEARN Nominal Velocity for Learn Run.自学习运行的额定速度ACCELERA LEARN Nominal Acceleration for Learn Run.自学习运行的额定加速度VELOCITY RELEVEL Nominal Velocity for Releveling Run and Reinitialization Run (to final floor level).再平层运行和初始化运行(至最底楼层)的额定速度ACCELERA RELEVEL Nominal Acceleration for Releveling Run and Reinitialization Run (to final floor level).再平层运行和初始化运行(至最底楼层)的额定加速度VELOCITY RECOVER Nominal Velocity for Recover Run.救援运行的额定速度ACCELERA RECOVER Nominal Acceleration for Recover Run.救援运行的额定加速度VELOCITY SLOW Intermediate Velocity for Reinitialization Run (Velocity Normal>=Velocity Slow>=Velocity Relevel).初始化运行的中间速度(正常速度>=慢速>=再平层速度).VELOCITY REINIT Nominal Velocity for Reinitialization Run.初始化运行的额定速度ACCELERA REINIT Nominal Acceleration for Reinitialization Run deceleration from Nominal Velocity (actual speed) to Velocity Slow.初始化运行中从额定速度到慢速的额定减速度ACCELERA NTSD Acceleration during NTSD Operation.在NTSD操作期间的加速度JERK TIMED Nominal Jerk for Timed Dictated Profiles.时间曲线中的额定加加速度VELOC profile 2 Nominal Velocity for Profile 2 Normal Run.第二正常运行曲线的额定速度ACCEL profile 2 Nominal Acceleration for Profile 2 Normal Run.第二正常运行曲线的额定加速度JERK profile 2 Nominal Jerk for Profile 2 Normal Run.LMCSS安装参数表页数:Page 8 of 13 日期:2005/1Translated by:翻译: YAN JUN严 军Checked by: XU WEIBIN检查: 许 伟 斌Approved by:批准:WU PENG吴 鹏第二正常运行曲线的额定加加速度VELOC profile 3 Nominal Velocity for Profile 3 Normal Run.第三正常运行曲线的额定速度ACCEL profile 3 Nominal Acceleration for Profile 3 Normal Run.第三正常运行曲线的额定加速度JERK profile 3 Nominal Jerk for Profile 3 Normal Run.第三正常运行曲线的额定加加速度VELOCITY ZERO Stopping Velocity.停止速度JPSDO TYPE TBA Type of Japanese Potential Slow Down Operation (0=JPSDO at Top Position 1=JPSDO at BottomPosition 2=JPSDO at all Terminal Positions).日本电位慢降强迫换速操作类型(0=JPSDO在上端站,1=JPSDO在下端站,2=JPSDO在两个端站)VELOCITY JPSDO Nominal Velocity for JPSDO (1<=Velocity Normal; 0=Disable JPSDO).JPSDO状态的额定速度(1<=正常速度; 0=禁用 JPSDO).GAIN FIXED POSCT Gain for Fixed Gain Position Control.固定增益位置控制的增益DELTA TC [ms] Δ(TC) Control Delay (ms).Δ(TC)控制延迟(ms).DECEL / ACCEL % Deceleration/Acceleration Ratio.减速度/加速度比率DESTINATION LEAD Destination (Target Floor) Lead Distance (mm).到目标层减小的爬行距离DESTINATION LAG Destination (Target Floor) Lag Distance (mm).到目标层增加的爬行距离LEVEL TOLERANCE Allowed Leveling Tolerance at Floor (mm).允许的平层误差ZERO SPEED TIME Duration for Zero Speed Dictation after Deceleration.减速后保持在零速的时间BKL to MOV tout Timeout between Brake Lifted and Car Moving (x10ms).从抱闸打开到轿厢运动的时限(x10ms).POSITION DISPLMT Position Displacement to account for DZ1/DZ2 Switches Hysteresis.为防止DZ1/DZ2开关磁滞的允许位移极限1LS2LS TOLERANCE Tolerance for 1LS/2LS Switches in hoistway.井道中1LS/2LS的允许误差值LMCSS安装参数表页数:Page 9 of 13 日期:2005/1Translated by:翻译: YAN JUN严 军Checked by: XU WEIBIN检查: 许 伟 斌Approved by:批准:WU PENG吴 鹏SLIPPAGE TOLERAN Slippage (Position Recalibration) Tolerance for Error Loging (big Slippage detection).绳滑移允许误差(相对于故障记录中的大尺寸滑移)COUNTS PER REVOL Encoder Pulses Per Motor Revolution.电机每转的编码器脉冲数MOTOR SPEED Motor Speed in Revolutions Per Minute.每分钟的电机转数PreJerk Pos Delt No. of PVT counts of movement to wait for while dictacting PreJerk Velocity.等待进入预加加速时PVT的计数次数ASCB Available Choice of ASCB availability (0=Not available 1=Available). 是否可用ASCB?(0=不可用,1=可用)HKDL Available Choice of HKDL availability (0=Not available 1=Available)是否可用HKDL?(0=不可用,=可用)HKDL Cycle Cnt Number of times the Hong Kong Door lock should be cycled before shutting down in case of lock fault 一旦门锁故障,在电梯进入死机状态前香港门锁将循环重试的次数。
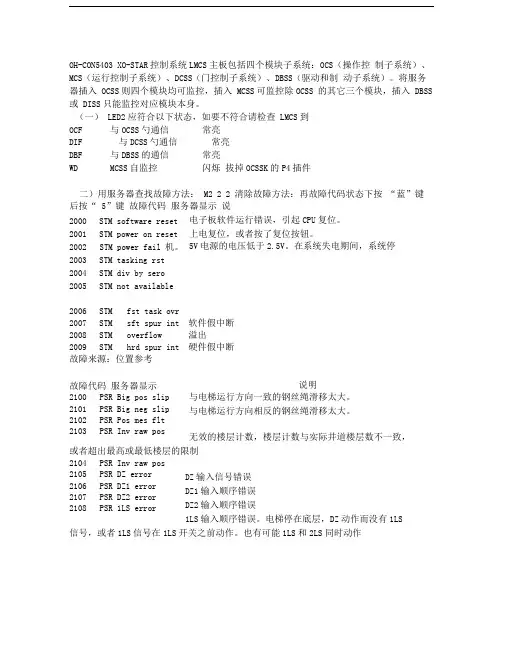
OH-CON5403 XO-STAR 控制系统LMCS 主板包括四个模块子系统:OCS (操作控 制子系统)、MCS (运行控制子系统)、DCSS (门控制子系统)、DBSS (驱动和制 动子系统)。
将服务器插入 OCSS 则四个模块均可监控,插入 MCSS 可监控除OCSS 的其它三个模块,插入 DBSS 或 DISS 只能监控对应模块本身。
(一) LED2应符合以下状态,如要不符合请检查 LMCS 到OCF 与OCSS 勺通信 常亮DIF 与DCSS 勺通信 常亮DBF 与DBSS 的通信 常亮WD MCSS 自监控 闪烁 拔掉OCSSK 的P4插件二)用服务器查找故障方法: M2 2 2 清除故障方法:再故障代码状态下按 “蓝”键后按“ 5”键 故障代码 服务器显示 说电子板软件运行错误,引起CPU 复位。
上电复位,或者按了复位按钮。
5V 电源的电压低于2.5V 。
在系统失电期间,系统停 2006STM fst task ovr 2007STM sft spur int 软件假中断 2008STM overflow 溢出 2009 STM hrd spur int 硬件假中断故障来源:位置参考说明 与电梯运行方向一致的钢丝绳滑移太大。
与电梯运行方向相反的钢丝绳滑移太大。
无效的楼层计数,楼层计数与实际井道楼层数不一致, 或者超出最高或最低楼层的限制DZ 输入信号错误 DZ1输入顺序错误 DZ2输入顺序错误1LS 输入顺序错误。
电梯停在底层,DZ 动作而没有1LS信号,或者1LS 信号在1LS 开关之前动作。
也有可能1LS 和2LS 同时动作 2000STM software reset 2001STM power on reset 2002STM power fail 机。
2003STM tasking rst 2004STM div by sero 2005STM not available 故障代码 服务器显示2100PSR Big pos slip 2101PSR Big neg slip 2102PSR Pos mes flt 2103 PSR Inv raw pos 2104PSR Inv raw pos 2105PSR DZ error 2106PSR DZ1 error 2107PSR DZ2 error 2108 PSR 1LS error2109 PSR 2LS error 1,2 2LS 输入顺序错误。
一、Color(颜色)参数:【颜色值】二、Background(背景)参数:【背景颜色】Background-Color:颜色值参数:【背景图片】Background-image:url("图片地址") 图片参数:【背景重复】Background-repeat 是否重复 repeat-x 平行重复 repeat-y上下重复no-repeat b不重复参数:【背景滚动】Background-attachment:值scroll 背景随着滚动 fixed背景固定 inherit 是继承父值参数:【背景定位】Background-position:值:x y值或者关键字[top conter bottom] [left contet right]三、font(字体)参数:【字体字型】font-family:值或多个字型“、”号分开参数:【字体风格】font-style:oblique italic 斜体 normal没有斜体参数:【字体粗细】font-weight:bold 粗体、bolder 比bold粗、normal 正常、lighter 比正常细、或100-900的数值参数:【字体大小】font-size:数值、medium smaller比前medium小、 normal正常、larger 比较大的或50%四、line-height (行间距)参数:【行间距】100%或数值px 或者数值EM五、font-variant(字体变量属性)参数:可以用来小写变大写,原来大写的更大,normal正常 small-caps 小写到大写六、text-indent(文本缩进属性)参数:数值缩进:数值,可负数(如text-indent:20px)七、text-align: 字体对齐属性参数:left左、right右、 conter中心 justify两端对齐八、text-decoration文本装饰熟悉参数:none 无装饰 underline下划线 overline上划线 line-through删除线九、test-transform:文本变形属性参数:none 不变 capitalize 首字母大写 uppercase全部大写 lowercase全部小写十、链接属性a:link 未访问的属性 a:visited访问过的属性 a:active 鼠标点击与释放之间 a:hover 鼠标悬停其他注意[注意值:inherit是继承父值][注意值:display排列参数inline横着排][伪元素::first-line伪元素向文本的首行添加特殊样式。

故障代码(四位)一、系统操作事件:显示最近一次板子复位或拉闸时间。
1、机械:MCSS上的复位按钮被按过。
2、MC板:软件死循环或看门狗超时。
若看门狗不能被系统复位,在一次正常访问后,看门狗将复位系统。
只在CPU高利用率时才会发生看门狗复位,例如轿厢正在平层时。
大厦拉闸:通常由于大厦主电源线开关断开或电容击穿,按MCSS上的“reset”钮将记录此错误。
轿内急停开关断开也会引起该错误。
微处理器系统错误,若软件两次不能在规定时间内执行完成被分配的任务,则记录此错误。
(在一排中出现两个2006错误)。
此错误会导致微处理器重起。
(类似看门狗错误)。
原因:⑴门区信号干扰(ID1Z ID2Z ODZ)可以引起大量错误。
⑵当轿厢平层时,发向微处理系统的请求增加,增加的临时请求使微处理器系统不能及时的分配时间。
因此会引起本错误。
EEPROM——可能是由于EEPROM某些参数被赋予了零值,导致处理系统进一步计算出错。
通常情况下如果MCSS更换了新的EEPROM,此时可能EEPROM中的许多参数是被赋予零值的。
记录电梯急停次数(或OCSS不响应的次数)原因:(1)OCSS通讯失败(详见2304号错误)(2)DCSS通讯失败(详见2404号错误)(3)DBSS 通讯失败(详见2505号错误) (4)安全链断开(见2809号错误) (5)LMCSS 状态变为NAV微处理系统未在规定时间内容完成软件所分配的工作。
如果你发现本故障记录少于10条或每天1—2条,就不必担心,这是个经常性的错误.如果微处理系统真的超负荷,会出现如下故障:2003号、2100号、2600号、2601号、2602号 原因:参考2003号故障解释微处理系统溢出错误微处理器探测到一个硬件外部中断。
原因:门区信号干扰(ID1Z, ID2Z,ODZ)可引起大量这样的错误。
二、位置参考(PSR)轿厢位置可用两种方式跟踪:(1)PVT监测马达旋转;(2)跟踪门区传感器转换。
TT维修人员使用手册TT是奥的斯电梯的专用服务器,主要用于调试人员的现场调试操作,但如果维修人员能熟悉它,充分利用它,将能缩短故障排查时间,在相对短的时间内解决问题。
下面将以西奥21VF型号的电梯说明TT在此类电梯中的使用方法。
第一篇 XO21VF概述XO21VF用了MECS,即模块化控制系统。
它由四个子系统组成,这些子系统包括操作控制子系统(OCSS)、运行指令子系统(LMCSS)、门控制子系统(DISS)、驱动控制子系统(DBSS)。
每个子系统(也叫服务系统)已经电脑化并能按设计好的要求完成专门的功能。
此外,每个服务系统靠串行传输线传送参数,交换信息。
第二篇 OCSS操作子系统(即RCBII板子)一、概述。
OCSS是一个管理操作功能的服务系统,负责此系统的PC板是RCBII。
OCSS 的功能是:负责指令、召唤、层楼显示、地震、消防运行目的层、开关门方向等的接受处理。
几乎所有的输入、输出信号(如:指令、召唤、层楼显示、停电自拯救、地震、消防、方向灯、蜂鸣器、厅外铃、停止开关等)都靠一个远站(RS5)与OCSS串行传输,此系统能靠一小组电线完成。
在OCSS和远站(RS)之间,考4根电线通讯,其中两根电源线(DC30V,HL2),两根信号线(L1,L2)。
OCSS有三组不同的串行信号线,分别是C/C(连接轿厢)、C/H(连接厅外)、G/H(连接群控)。
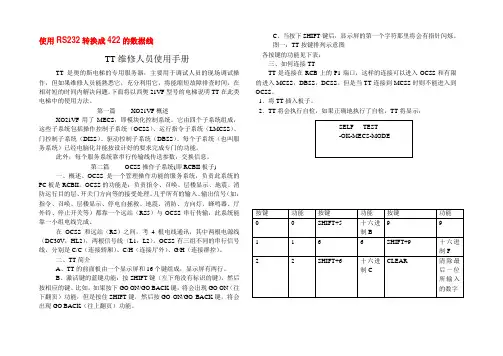
二、TT简介A、TT的前面板由一个显示屏和16个键组成,显示屏有两行。
B、激活键的蓝键功能:按SHIFT键(左下角没有标识的键),然后按相应的键。
比如,如果按下GO ON/GO BACK键,将会出现GO ON(往下翻页)功能,但是按住SHIFT键,然后按GO ON/GO BACK键,将会出现GO BACK(往上翻页)功能。
C、当按下SHIFT键后,显示屏的第一个字符那里将会有指针闪烁。
图一:TT按键排列示意图各按键的功能见下表:三、如何连接TTTT是连接在RCB上的P1端口,这样的连接可以进入OCSS和有限的进入MCSS,DBSS,DCSS。
常用的CSS标签标记属性翻译注释1、字体属性(type)font-family(使用什么字体)font-style(字体的样式,是否斜体):normal/italic/obliquefont-variant(字体大小写):normal/small-capsfont-weight(字体的粗细):normal/bold/bolder/lithterfont-size(字体的大小):absolute-size/relative-size/length/percentage2、颜色和背景属性(backgroud)color(定义前景色,例如:p{color:red})background-color(定义背景色)background-image(定义背景图片)background-repeat(背景图案重复方式):repeat-x/repeat-y/no-repeatbackground-attachment(设置滚动):scroll(滚动)/fixe(固定的)background-position(背景图案的初始位置):percentage/length/top/left/right/bottom3、文本属性:(block)定义间距:word-spacing(单词之间的距离)letter-spacing(字母之间的距离)text-decoration(定义文字的装饰):nore/underline/overline/line-through/blinkvertical-align(元素在垂直方向的位置):baseline(基线)/sub/super/top/text-top/middle/bottom/text-bottomtext-transform(使文本转换为其它方式):capitalize(大写)/uppercase(首字母大写)/lowercase(小写)/nonetext-align(文字的对齐):left/right/center/justifytext-indent(文本的首行缩进)length/percentageline-height(文本的行高):normal/numbet/lenggth/percentage(百分比)定义超链接:a:link {color:green;text-decoration:nore}(未访问过的状态)a:visited {color:ren;text-decoration:underline;16pt}(访问过的状态)a:hover {color:blue;text-decoration:underline;16pt}(鼠标激活的状态)4、块属性(block)边距属性:margin-top(设置顶边距)margin-right(设置右边距)margin-bottom(设置底边距)margin-left(设置左边距)填充距属性:padding-top设置顶端真充距)padding-right设置顶端真充距)padding-bottom设置顶端真充距)padding-left设置顶端真充距)5、边框属性(border)border-top-width(顶端边框宽度)border-right-width(右端边框宽度)border-bottom-width(底端边框宽度)border-left-width(d左边框宽度)border-width(一次定义边框宽度)border-color(设置边框颜色)border-style(设置边框样式)border-top(一次定义顶端各种属性)border-right(一次定义右端各种属性)border-bottom(一次定义底端各种属性)border-left(一次定义左端各种属性)图文混排:width(定义宽度属性)height(定义高度属性)float(文字环绕在一个元素的四周)clear(定义某一边是否有环绕)6、项目符号和编号(list)display(定义是否显示)white-space(怎样处理空白部分):normal/pre/nowraplist-style-type(在列表前加项目符号)disc(圆点)/circle(圈)/square(方形)/decimal(阿拉伯数字)/lower-roman(小写罗马数字)/upper-roman(大写罗马数字)/lower-alpha(小写英文字母)/upper-alpha(大写英文字母)/norelist-style-tyle(在列表前加图案):<url>/nonelist-style-position(决定列表项中第二行的起邕位置)list-style(一次性定义所有属性)7、定位(positioning)即层属性Type:设定对象的定位方式。
使用RS232转换成422的数据线TT维修人员使用手册TT是奥的斯电梯的专用服务器,主要用于调试人员的现场调试操作,但如果维修人员能熟悉它,充分利用它,将能缩短故障排查时间,在相对短的时间内解决问题。
下面将以西奥21VF型号的电梯说明TT在此类电梯中的使用方法。
第一篇XO21VF概述XO21VF用了MECS,即模块化控制系统。
它由四个子系统组成,这些子系统包括操作控制子系统(OCSS)、运行指令子系统(LMCSS)、门控制子系统(DISS)、驱动控制子系统(DBSS)。
每个子系统(也叫服务系统)已经电脑化并能按设计好的要求完成专门的功能。
此外,每个服务系统靠串行传输线传送参数,交换信息。
第二篇OCSS操作子系统(即RCBII板子)一、概述。
OCSS是一个管理操作功能的服务系统,负责此系统的PC板是RCBII。
OCSS的功能是:负责指令、召唤、层楼显示、地震、消防运行目的层、开关门方向等的接受处理。
几乎所有的输入、输出信号(如:指令、召唤、层楼显示、停电自拯救、地震、消防、方向灯、蜂鸣器、厅外铃、停止开关等)都靠一个远站(RS5)与OCSS串行传输,此系统能靠一小组电线完成。
在OCSS和远站(RS)之间,考4根电线通讯,其中两根电源线(DC30V,HL2),两根信号线(L1,L2)。
OCSS有三组不同的串行信号线,分别是C/C(连接轿厢)、C/H(连接厅外)、G/H(连接群控)。
二、TT简介A、TT的前面板由一个显示屏和16个键组成,显示屏有两行。
B、激活键的蓝键功能:按SHIFT键(左下角没有标识的键),然后按相应的键。
比如,如果按下GO ON/GO BACK键,将会出现GO ON(往下翻页)功能,但是按住SHIFT键,然后按GO ON/GO BACK键,将会出现GO BACK(往上翻页)功能。
C、当按下SHIFT键后,显示屏的第一个字符那里将会有指针闪烁。
图一:TT按键排列示意图各按键的功能见下表:三、如何连接TTTT是连接在RCB上的P1端口,这样的连接可以进入OCSS和有限的进入MCSS,DBSS,DCSS。
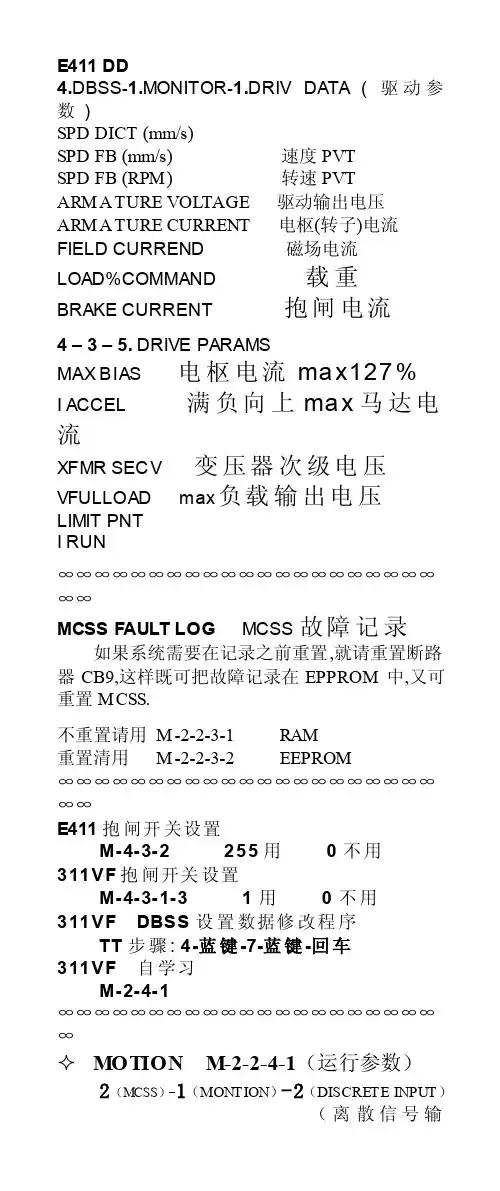
E411 DD4.DBSS-1.MONITOR-1.DRIV DATA ( 驱动参数)SPD DICT (mm/s)SPD FB (mm/s) 速度PVTSPD FB (RPM) 转速PVTARMA TURE VOLTAGE 驱动输出电压ARMA TURE CURRENT 电枢(转子)电流FIELD CURREND 磁场电流LOAD%COMMAND 载重BRAKE CURRENT 抱闸电流4 – 3 – 5. DRIVE PARAMSMAX BIAS 电枢电流ma x127%I ACCEL 满负向上ma x马达电流XFMR SECV变压器次级电压VFULLOAD max负载输出电压LIMIT PNTI RUN∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞MCSS FAULT LOG MCSS故障记录如果系统需要在记录之前重置,就请重置断路器CB9,这样既可把故障记录在EPPROM中,又可重置MCSS.不重置请用M-2-2-3-1 RAM重置清用M-2-2-3-2 EEPROM∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞E411抱闸开关设置M-4-3-2 255用0不用311VF抱闸开关设置M-4-3-1-3 1用0不用311VF DBSS设置数据修改程序TT步骤: 4-蓝键-7-蓝键-回车311VF 自学习M-2-4-1∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞MOTION M-2-2-4-1(运行参数)2(MCSS)-1(MONTION)-2(DISCRETE INPUT)(离散信号输入)MCM 运行控制模式0 INS 检修1 ACC 终端运行2 RCL 取消3 COR 初始化4 EME 应急服务5 RCV 恢复6 RLV 再平层7 NOR 正常MLS 运行逻辑模式0 SHTD 故障(关梯)1 无用途2 STBY 准备状态3 PREP 准备行车4 PRER 起动准备5 LFTB 开抱闸6 LLPP 渐进加速7 RUN 行走8 TMDC 紧急减速9 PPDC 渐进战速10 DRPB 跌抱闸11 RSET 重置PRI CAR VEL(第一轿厢速度,由SPPT反馈)DICT VEL (指令速度,MCSS输出命令)DICT VEL OUT (指令速度输出)DICTACCEL (指令加速度)DICT ACCEL OUT (指令加速度输出)SCC FLAG (停止控制点信号)0=复位SET=减速255=设置POSITION M-2-2-4-2 (位置参数)CUR FLOOR (当时楼辰)CAR POSITION (第一楼层位置)COMMIT FLOOR (可停靠楼层)DEST FLOOR (目的楼宸)DIST TO GO (需运行距离)T DIST TO GO (距端站距离)COMMANDED DIR 0=下. 255=上(指令方向)FRNTL VLG ZN (前门平层区域)ALTNL VLG ZN(后门平层区域)FRNT RLVLG ZN (前门重平层区域)ALTN RLVLG ZN (后门重平层区域)FRNT LEVEL ZN (前门可开门区域)ALTN LEVEL(后门可开门区域)DISC OUTPUTS M-2-2-4-3(离散输出信号)ux (上行命令输出)dx (下行命令输出)PFDZ (前门门区继电器)padz (后门门区继电器)1x2 (舒适运行回路控刺1)1x1 (舒适运行回路控刺2)cio (检测继电器)j7-7RYLE (PC板重置)wdgd (看门狗数据,灯)dtst (方向测试)cpua (PVT)cpub (PVT“A”控制信号)dmas (PVT“B”控制信号)diag (诊断)sppt (SPPT重置)SAFETY M-2-2-4-4 (安全参数)SAFE IN (安全信号输入)SAFE OUT (安全信号输出)SAFE FLAG(安全信号,为1发生故障时安全回路正常,为0发生故障前安全回路断)SYS RESET (需要重置系统)FRT DOOR SAFE (前门安全)ALT DOOR SAFE(后门安全)DISC INPUT M-2-2-4-52(MCSS)-1(MONTION)-2(DISCRETE INPUT)(离散信号输入)30v (30v电源)INIU (大写向上小写向下初始化运行) dbdc (驱动和制动切断)ices (轿厢急停状态)FGDS (前门感应器)INA (检修状态)iis (检修初始开关)upcm (输入向上命令)ux (上方向继电器输入)dncm (输入下行命令)SC (速度检测继电器)dx (下方向继电器输入)SCS1 (前门锁电路,安全回路测试点1)scs2 (后门,安全回路测试点2)DZ (前门区继电器)fid1 (上,前门内区传感器1)fid2 (下,前门内区传感器2)fodz (前门外区传感器)aid1 (后门上,前门内区传感器1)aid2 (后门下,前门内区传感器2)aodz (后门外区传感器)adz (辅助门区继电器)SAFE (安全回路c1.c2继电器,安全信号输入)SCDC (速度检测驱动检查)lxck (舒适运行回路检测)iobd (MCSS I/O板5VDC)GSM (GS轿门开关检测)EES (紧急停止,EES继电器状态)lac (低电压传感J2)j5-7AGDS (后门状态)pwrf (电源故障J1)EEPR (EEPROM准备、不能写入)WDGS (硬件监测)PVTD (PVT方向指示)ANSI (可用模式,ANSI/CEN标准)E2DS (EEPROM打开,EEPROM不允许跳线)drvf (驱动故障)HTBT (软件运行监测)5v (MCSS A板5v检查)∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞2 MCSS —2 TEST (测试) —5 RESET EVENTS(重置事件)∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞LMCSS故障代码✧来自执行系统的故障2000 软件重置2001 重新起动2002 断电,电源故障2003 内部故障2004 内部故障2005 坏梯2006 内部故障2007 内部故障2008 内部故障2009 内部故障✧来自位置资料的故障2100 钢丝绳最大正向打滑2101 钢丝绳最大反向打滑2102 位置错误2103 楼层显示错误2104 位置错误2105 ODZ故障2106 1DZ1故障2107 1DZ2故障2108 1LS故障2109 2LS故障✧来自维修工具的通讯故障2200 超时故障2201 匹配故障2202 超时运行故障2203 部分资料丟失故障2204 信息检查故障,在TT和LMCSS之间✧来自OCSS的通讯故障2300 超时故障2301 匹配故障2302 超时运行故障2303 部分资料丟失故障2304 OCSS通讯故障,在OCSS和LMCSS 之间✧来自DCSS的通讯故障2400 超时故障2401 匹配故障2402 超时运行故障2403 部分资料丟失故障2404 DCSS通讯故障,在DCSS和LMCSS 之间✧来自DBSS的通讯故障2500 超时故障2501 匹配故障2502 超时运行故障2503 部分资料丟失故障2504 DBSS通讯故障,在DBSS和LMCSS 之间✧来自运行曲线的故障2600 电梯越层2601 运行曲线误差过大,软件时间问题2602 超时故障✧来自动作逻辑的故障2700 准备/抱闸故障,驱动无法准备运行或抱闸不能动作2701 准备时间过长,5秒钟内驱动无法完成准备运行状态2702 抱闸时间过长, 5秒钟内驱动无法完成提升或下降指令2703 驱动故障2704 停止/停止工作,驱动器超温2705 扭矩极限,D BSS输出扭矩极限指令2706 再平层运行(次数)2707 恢复运行(次数)2708 初始化运行故障(次数)2710 移动时间过长,不准备移动时间过长✧来自安全系统的故障2800 超速,轿厢以125%的速率运行2801 轨迹出错,马达不按照规定的曲线运行2802 PVT方向,PVT操作方向错误2803 NT SD超速,轿厢进入终端楼层时速度太快2804 电梯超时仍不能起动2805 U/D继电器输入出错2806 DBP继电器输入出错2807 ETSC继电器输入出错2808 SC继电器输入出错2809 DFC继电器输入出错2810 DBD继电器输入出错2811 ESS操作故障,轿厢在3LS/4L S超速2812 SAF操作故障,安全链损坏2813 DFC紧急停车2814 FSO/ASO继电器输入出错2815 EES检测故障,检测安全链运行失败2816 EES输入故障,EES输入进错误状态2817 标准设置,ANSI开关位置2818 D Z故障2819 手动减速2900 MC SS故障2901 轿厢不合规定地运行,轿厢在轿门开着时驶出D Z2902 区域进入故障2903 AUD输入故障,AUD或INS输入进错误状态2904 安全链,安全链打开2905 开门, 轿厢驶出重平层区时轿门开着2906 ETP继电器故障2907 LSP跌落,低速保护继电器跌落2908 LSP继电器故障, LSP继电器无法工作∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞DBSS故障GEM. MVS. HVS DRIVE FAULTSDrive software; AAA30178AAC(U34)AAA30063AAE( U4 );AAA30288AAA( U6 )AAA30289AAA(U11)Base FaultGate Supply Fault原因; 硬件监测到给IGBT门驱动电路的供电丟失.1.检查到控制柜的驱动接地.2.更换PIB板.3.更换驱动单元.Inverter OCT原因; 马达驱动过流. 这与IGBT发生问题.1.校验驱动参数, 校验抱闸操作.2.检查马达接线, 检查马达接地.3.更换驱动D Current FDBKQ Current FDBK原因; 表示当驱动得电要运行时励磁电流启动故障.当一个故障干扰驱动的电流传感时发生.1. 校验驱动参数2. 检查和紧固马达接线3. 检查AMP-TRAP保险丝F1(在驱动排上).若此保险丝爆,不要更换! 与区域工程师联系4. 查驱动内的编码器脉冲,马达转速,铭牌速度参数 5. 更换驱动Current FDSK sum原因; 此故障被DSP软件监测到,如果三相逆变器输出电流与0差值的总数超过在EEPROM参数”inv io limit”的值时,此故障产生1. 校验驱动参数2. 检查处理板接线3. 查PIB板接线4. 更换PIB板5. 更换驱动Overtemp 超温原因; 当驱动散热片内的热开关跳开或马达热保护开关跳开时发生,也可能发生在接口板对热装置的通道读数失效1. 机房空气温度太高2. 驱动柜风扇不工作3. 检查控制柜风扇4. 检查马达热保护开关5. 检查接线端158的30VDC6. 更换PIB板Motor Overload超载原因; 马达”time-current’超过额定电流值1. 校验驱动参数,”Drive rated I RMS””Mtr ovl tmr"2. 查马达接线, 查曳引机抱闸操作3. 校验LMCSS参数;”Accelra Normal”“Jerk Normal”“% of overbalance”4. 校正”% of overbalance”5. 查PVT丟失6. 查马达和编码器的状态Current mean原因; 这是三相逆变器电流当驱动处与”空闲”时的平均值, 检查参数” I off mean lim”1. 校验驱动参数2. 更换驱动3. 更换PIB板Current variance原因; 三相电流反馈信号中的一个与其它两个不同,当驱动处与空闲时,有接近”零”电流通过马达1. 校正驱动参数2. 检查马达接线是否接地或短路3. 驱动处理板故障4. PIB板故障, 更换5. 更换驱动DC link OVT原因; 监测到DC回路电压超过过电压触发点,此故障通常是由于线电压整流的丟失1. 校验驱动参数”Bus OVT”, “DC link OVT”,“AC line voltage”, “Bus fscale”, BRK regfrq”2. 用万用表测量”AC Line Voltage”与TTM-4-1-3-1 ”line-line V”比较, 查M-4-3-1-1参数”AC line Volt”3. 查DBR电阻接线,电阻值4. 动态抱闸晶体管故障, 更换驱动5. 更换PIB板DC link UVT原因; DC回路电压低于低电压触发点1. 低AC线电压, 用万用表测量R,S,T端子的AC电压,与TT的M-4-1-3-1” line-line V”比较,用M-4-3-1-1校验驱动参数”AC lineVolt”2. 校验驱动参数”DC link UVT”3. 更换PIB板PVT loss PVT Tracking Error原因; 此故障仅在”手动模式”发生,通常表示PVT 或PVT接线问题1. 查PVT到驱动的接线2. 查PVT电压3. 更换PVTBrake relay state Brake state原因; 处理器监测到抱闸继电器的错误状态, 此故障通常在”手动模式”发生1. 查LB触点输入到驱动接口板2. 若曳引机安装抱闸开关, 查BSR输入到接口板触点, Area 113. 查驱动参数”PVT threshold min”“PVT threshold max”4. 查到驱动的PVT信号丟失5. 此故障与其它有关抱闸继电器操作故障相结合,查在驱动和LMCSS故障记录内所有故障Brake relay原因; 驱动已发送命令给LMCSS要求吸或掉抱闸,但信号显示驱动在允许的时间内没有收到抱闸继电器改变状态1. 查曳引机抱闸操作2. 查驱动参数”Delay lft brk”3. 查LB继电器触点, 查BRS继电器触点,Area11Sfty chain state原因; 监测到安全回路丢失1. 查Area 5的安全回路2. 查输入到PIB板P10-7的U,D触点3. 更换PIB板UDX pick no UDX pick ncUDX not pick no UDX not pick nc原因; UDX继电器有两个触点被监控,一个常开, 一个常闭,这些故障表示两个触点的一个与驱动处理器的指定状态不一致1. 当安全回路掉落有可能发生此故障2. 表示在PIB板上的UDX继电器有问题, 更换PIB板UDX pick nc warnUDX pick no warn原因; PTR(准备运行)掉落前安全回路失去时发生1. 此故障发生在每次检修运行结束前,这是正常的E2 write protect原因; 当驱动EEPROM写保护开关处于写入位时,驱动接收到一个准备运行信号1. DBSS不允许运行时对EEPROM写保护Mtr thermal cntct原因; 马达热触点改变状态1. 马达过热,查机房温度2. 若马达有风扇,它动作吗?3. 马达热回路问题,驱动要求其触点常闭, 查倒30VDC电压4. 换PIB板Dyn Brk Trnsistr原因; 驱动监控动态刹车三极管(DBT)当驱动处于空闲时,如DBT是on,产生一个故障1. 此故障很少看到,与区域工程师联系Brake dropped原因; 驱动监测到抱闸开关状态改变不按次序1. 查抱闸操作2. 查BSR继电器输入, Area 113. 查驱动参数” Delay brk lftd“Cnvtr phase imbal原因; 交流电源三相不平衡,电压方大相互不同,超过参数” AC ln ph lmbal “1. 主电源保险丝爆2. 测量AC线电压, 查驱动参数3. 驱动输入整流器开路,换驱动Cnvtr AC UVT原因; 驱动测量三相线电压,如电压方大少于TT 的” AC line UVT “设置的低限位时产生1. 测量AC线电压,是否在常规值10%2. 查驱动参数” AC line UVT “Host EPROM chksm原因; 通电后每5秒钟执行一次检查EPROM 1. 更换处理板2. 替换U34 ( U6 ) EPROMDSP user chksmDSP pwr-up chksmDSP code chksm原因; 内部软件检查故障1. 替换U4 ( U11 ) EPROM2. 与区域工程师联系3. 更换处理板E2 Checksum error原因; 当每次EEPROM参数改变后,主机执行一次检查,若发生测试故障,产生此1. 在驱动参数改变完成前写保护开关被触发时此故障发生,重新改变参数(用TT)直到显示改变已完成, 更换U39 EEPROME2 data invalid原因; 输入的参数高于或低于限制值1. 每次输入无效参数时此故障被记录2. 参数输入必须在它的预定范围内HOST schedul orun HOST 10ms tskorn HOST 40ms tskorn HOST 200ms tskornDSP timer orun DSP 400us TtskorunDSP 1.6us Tskorun DSP 10us Tskorun DSP Brk Tskorun DSP ivel orunDSP pw fctr orun DSP inv i orun DSP fid o orun原因; 主机实时执行和DSP软件监控它们自己的任务确保问题的发现1. 这些故障从不发现. 若有, 与区域工程师联系2. 更换处理板MCSS lnvalid Msg.原因; DBSS收到从LMCSS来的数据有差错, 当LMCSS被重置或电源故障时产生1. 典型的噪音通讯线2. 检查DBSS和LMCSS间通讯线的接地,屏蔽和接头PLL Unlocked1. 由于交流线电压低和相间不平衡产生2. 查驱动参数3. 查交流三相电源∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞E311 or E411[HSDD-DBSS] Troubleshooting 发现并修理故障2.0 马达不转2PC上DS5-B亮a. 6PC按手动模式接线, 查接线图b. 6PC不好, 更换6PCc. 2PC不好, 更换2PC2.1马达不转2PC上DS4-D和DS6-A亮a. MCSS和DBSS的J3口串行通讯线不好,TT显示“10 SEC COMM FAULT ”,查串行线及其连接b. MCSS不发送到DBSS, TT故障记录显示“10 SEC COMM FAULT”,查MCSS电源和串行通讯.c. 2PC不好, 更换2PC.d. 串行通讯一经建立后仃止, TT记录“150MS COMM FLTS”,MCSS由于某种原因停止通汛,校验并校正. MCSS和DBSS连接松,校验所有的连接. 2PC不好, 更换2PC.2.2马达不转2PC上DS4-C和DS6-A亮, TT登记“LOOP FAULT”a. 安全回路在J6-5和J6-6间接线不对,校正接线问题.b. CMTB的短接线没有接到6PC, 检查问题c. 6PC不好,更换6PCd. 1CR继电器不好, 若2PC上J1-1到J1-2间无24VDC, 查1CR接线e. C1或C2不好, 查验C1和C2f. 1M或2M不好, 查1M或2M确保吸合g. 1M或2M辅助触点不好, 若1M和2M不吸,72与73线间无115VAC, 更换辅助触点h. 2PC不好, 若步骤g正确,或若J1-1到J1-2无24VDC, 更换2PCI. 6PC有缺陷, 更换6PC2.3马达不转2PC上DS5-A和DS6-A亮a. 抱闸吸合电流太低, 用TT设置吸合电流达合适值b. 抱闸不好, 查抱闸线圈接线或更换c. 抱闸开关不好, 若抱闸不吸而TT设置了抱闸开关,更换开关d. 2PC不好, 更换2PC.e. 6PC不好,更换6PCf.2EA不好,更换2EA2.4马达不转2PC上DS5-A亮, DS7先亮后灭a. 抱闸保持电流太低, 通过TT增加保持电流的值.2.5马达不转2PC上DS5-A积DS7亮, 然后DS4-B和DS6-A亮a. 2PC上J2口接线不正确, 查接线图b. 马达磁场接线错误, 马达磁场接线相反2.6马达不转2PC上DS5-A亮, 然后DS4-A和DS6-A亮a. 抱闸线圈短路或接线不正确, 更换或修理抱闸线圈b. 2PC不好, 更换2PC2.7马达不转,通电后2PC上DS3-C,DS4-A和DS6-A亮, Field/Brake板(1PC-2)上DS1亮a. 马达磁场线圊短路, 查马达磁场及接线, 如有必要更换b. 2EA不好, 更换2EA2.8马达不转,通电后2PC上DS3-C,DS6-A亮,TT 故障显示” FIELD LOSS “a. 马达磁场没接或电阻太高,查马达磁场接线b. 2PC不好,更换2PCc. 2EA不好,更换2EA2.9马达不转2PC上DS3-B和DS6-A亮,TT故障显示” LOW LINE FAULT”a. AC输入电压低,查起因,解决输入低问题b. 3PC不好,若1PC上测试点33,34和36TP到公共点29TP电压不是6VAC,更换3PCc. TT的” SEC VOLTS REF “设置不对,变压器次级电压,查1PT变压器铭牌,再校验TT设置与1PT的次级电压d. 2PC不好, 若PCB少于0.7VDC, 更换2PCe. 1PC不好, 若上述检查正确, 16TP电压大于0.7VDC更换1PC2.10马达不转2PC上DS3-D和DS6-A亮a. 爆AC电源保险丝, 若电源保险丝1F,2F,3F爆,去查征兆4.0b. 爆DC电源保险丝,查电源保险丝4F, 若爆, 查征兆4.0c. TT输入了不正确的” SEC VOLTS REF “值, 输入正确值d. 2PC不好, 若2PC的J1-6到公共端(TP4或TP8)为5VDC,且1PC上18TP大于10VDC, 更换2PCe. 3PC不好,更换2.11马达不转2PC上DS4-C(BLOWN FUSE)和DS6-A亮, TT显示”O.C. VLT FAULT “a. 1PC不好, 若#29和#33之间电压不为0,8TP大于正负0.3 V,更换1PCb. 2PC不好, 若1PC上8TP为0,更换2PCc. SCR不好, 若#29到#33间电压保持,查失效的SCR,若有必要更换2.12马达不转6PC上DSlK 6不亮, 2PC上DS3-C 和DS6-A亮, TT记录“FIELD OVER CURREND”a. 2PC不好,更换2PCb. 2EA不好,更换2EA2.13马达不转2PC上DS3-A(1ST)和DS6-A 亮a. 1PC不好, 更换b. 2 PC不好, 更换c. 3 PC不好, 更换d. SCR不好, 查失效的SCR,若有必要更换3.0马达运行方向错误a. 马达磁场和转向接线相反,将马达礅场接线和转速反馈接线反接4.0马达以减速运行a. 9PC不好, 校验9PC的part number, 若不对,更换9PCb. 转速不正确, TP23电压上行时应为+2VDC,下行时为-2VDCc. EEPROM内设置的转速计数,线速和或RPM不对,通过TT设置正确值d. 力矩不够, 查合适的磁场激励e. 激磁过大, 查合适的磁场激励f. 1PC不好, 更换g. 2PC不好, 更换5.0马达仅以全速运行a. 9PC不好, 更换b. 转速计数, 线速或RPM设置不正确, 设置正确置c. 2PC不好, 更换d. 1PC不好, 更换6.0驱动跳或爆保险丝a. SCR短路, 查SCRb. 输入输出线短路, 排除短路c. 1PC或3PC不好, 更换电脑板7.0马达仅单方向运行或不再发生a. 1PC与2PC之间J1或J2不连接, 连合适的端口b. 1PC不好, 更换c. 2PC不好,更换MCSS SOFTWARE SETUPMCSS 软件版本AAA30045AAESYSTEM E311、E311M、E411、E411MM-2-3-1 CONTRACT/CODE CHECKING 合约/标准参数ACCESS ZONE CHECKING (0)顶, 底层开门检修有255. 无0.ADISS OPTION (255)电子磅或后门用255ADV DOOR OPENING (255)提前开门用255. 无0ALTN DOOR OPTION (0)有后门或双层门有打255. 只有前门打0AUTO LEARN ORION (255)做平层时up放手后不停255否则放就停AVG PASSENGER WEIGHT(70)计算乘梯人数平均每人KgB44 CW OPTION (0)用在加拿大, 必须输入0B44 OPION(0)BIAS TORQUE OPTION (255)在提升抱闸时作预负载, 用255CAR AVAIL TIMEOUT(10000)一台电梯故障MCSS在10秒后重薪派梯 10000毫秒(=10秒)CEN GDS ENABLE(255)欧共体CEN打“255”美亚太区打ENSI“0”CIO RELAY OPTION(255)有CIO继电器MCSS 中写“255”否则写“0”CODE LEVELING VELOCITY(750)平层速度校准750mm/s只能改小CODE MAX PERCENT(100) >100%负载时电梯不动COUNTRY AJG 操作一些确定功能时依据国家标准0(NAO)、1(PAO)、2(ETO)DBL DECK OPTION(0)双层轿厢选项。
CSS(Cascading Style Sheets)是一种用来描述HTML或XML文档样式的语言,它可以用来对网页的布局、字体、颜色、背景等方面进行样式设计。
在CSS中,有一些重要的参数可以帮助我们更好地控制网页的样式,本文将对CSS中的important参数进行详细介绍和讨论。
1. 重要性在CSS中,如果多个样式规则应用到同一个元素上,浏览器会根据“层叠”的原则来确定最终应用哪个样式。
通常情况下,浏览器会根据样式的特异性(specificity)和样式规则的先后顺序来决定哪个样式会被应用。
2. important参数的作用在CSS中,可以使用!important参数来强制指定某个样式规则,使其具有高于其他样式规则的优先级。
使用!important参数可以覆盖其他普通样式规则,确保指定的样式可以生效。
3. 使用方法在CSS中,可以在样式规则的属性值后面添加!important参数,以表示这个样式规则的重要性。
例如:```p {color: red !important;}```上述示例中,p元素的文字颜色将会被设置为红色,并且具有非常高的优先级,其他普通的样式规则很难覆盖这个设置。
4. 注意事项虽然!important参数可以帮助我们快速地解决样式覆盖的问题,但是在实际使用中需要慎重考虑。
因为!important参数会削弱CSS样式的可维护性和可读性,可能会导致样式的混乱和不可预测的后果。
5. 替代方案为了避免滥用!important参数,我们可以尝试使用其他方法来提高样式的优先级,例如提高样式规则的特异性,或者重新调整样式规则的顺序。
使用嵌套的CSS规则或者使用更具体的选择器也是提高样式优先级的有效方法。
6. 总结在CSS中,important参数可以帮助我们快速地解决样式覆盖的问题,但是需要慎重考虑使用。
在实际开发中,我们应该尽量避免滥用!important参数,而是通过调整样式规则的特异性和顺序来提高样式的优先级,以确保样式代码的可维护性和可读性。
GUIDE598.DocProductGuide Lines Date:06-May-1998 AdministrationC. Safety Functions:- Provide safety device monitoring and emergency braking- Assure door and door zone operations safety- Assure terminal operations safety- Determine motion control modesD. Installation and Maintenance:- Monitoring of elevator dependent data- Setup of installation parameters- Event logging- DiagnosticsProductGuide Lines Date:06-May-1998 Administration2.1 RelevellingIf the car sags outside of the specified levelling tolerance, a relevelling operation takes place to bring the car back within the specified tolerance. Maximum duration of relevelling run is 5 seconds.2.2 PretorquingThe MCSS transmits measured car load data to the DBSS prior to issuing a brake-lift com-mand. It is the task of the DBSS to keep the car in balance (pretorquing at dictated zero velocity) after lifting the brake. Only when the brake-lifted signal has been received from the DBSS the MCSS starts generating the velocity/acceleration profile.2.3 SafetyThe safety function of the MCSS monitors the safety chain and 'safe status' from the vari-ous subsystems.With the safety chain open all car motion is prohibited. The MCSS removes all motion de-mands to the DBSS and goes into a shut-down state. A new motion demand will only be issued when the safety chain is closed. Additional safety functions monitors the car speed for the different motion modes and allows door opening at appropriate speed when the car is in the door zone. If there is a load weighing possibility, above 125% overload an over-load flag is set and car motion is prohibited.2.4 CodeComplies with EN 81/1 and TRA 200 code.ProductGuide Lines Date:06-May-1998 Administration3 DESCRIPTION OF HARDWARE3.1 MainComponentsThe main components of the board are listed below:- U1:7705 Voltage detector- U2,U3:75176 RS 485 Transmitter/Receiver- U4:75174 RS 422 Driver- U15,U18:Z84C40AP CMOS SIO 6MHz- U16:P82C55A PIO- U20,U25:P82C54 Counter/Timer- U29:P80C88A-2 CPU 8MHz- U33:43256 RAM 32kB 150ns- U36:82C84 Clock generator- U37:27C1000-15 EPROM 128kB- U38:7111 BI-PROM 256x8- U44:28C64-25 EEPROM 8kB- U45:LM336 Voltage reference- U48:LM340 Regulator 5V- XU48:Heatsink 6013- Y1:Crystal 22.1184Hz- OC1,OC2,OC4:Opto Coupler PC900- OC3:Opto Coupler HCPL-2630- DIS1:16 Seg. Display HPDL-1414- LED2:LED Array HLMP-6654- SW1:RESET Switch- SW2:DIP Switch 2pol. for EEPROM write protection and selection of servicetool or enhanced diagnostics serial interface.- BAT1:Battery 3V for memory protection- HC1, . . . . HC4:30VAC Input Level Converter Hybrid Integrated Circuit- HC5, . . . . HC1:110VAC Input Level Converter Hybrid Integrated Circuit- SSR1, . . .SSR7:110VAC Solid State Relay 80239ProductGuide Lines Date:06-May-1998 Administration4 GENERAL FUNCTIONAL DESCRIPTION4.1 Motion Control ModesThe system provides the following Motion Control Modes (MCM) or Operational Modes :- NRD Not ReaDy- NOR NORmal- REC RECover - rescue- RIN (Re)INitialization- RLV ReLevelling- INS INSpection - electrical recall- LRN LeaRNing- EST Emergency STop- TCI Top of Car Inspection- ERO Electrical Recall OperationThese various motion control modes contain commonly used sequences to execute the required functions. At the other hand there are also only slight differences between some modes.Therefore, three separate but interdependent state sequences are introduced:- Motion Logic State(MLS)- Motion Drive State (MDS)- Profile Generator State(PGS)The Motion Logic State performs essentially the MCM specific actions, whereas the Motion Drive State describes more closer the motion states. The specific velocity and accelera-tion/deceleration segments during motion are described by the Profile Generator State. Their dependencies are shown in the following section.The actual operational mode and the different states of the system can be monitored via the Service Tool Display.For a complete list of all modes and states refer to the Service Tool Reference ListProductGuide Lines Date:06-May-1998 AdministrationElectrical Characteristics:- input impedance: 6.95kOhms- voltage level:input: V0 >= 7.2 VDC; Riv = 3.3 kOhms --> output: V >= 4.5 VDCinput: V0 <= 6.5 VDC; Riv = 3.3 kOhms --> output: V <= 0.5 VDC5.1.5 Position/Velocity Transducer Inputs (PVT)Phase A/B quadrature signals are sent from the DBSS to the MCSS over RS 422 interface lines. The specifications are:- balanced, unidirectional data transmission- data output TBD- input sensitivity TBDThese signals are then fed into the MCSS board circuitry which converts them into pulse trains. One of them represents upward movement (up count), the other one downward movement (down count).ProductGuide Lines Date:06-May-1998 AdministrationElectrical Characteristics:- input operating voltage:5V ±8 %- input impedance:300 Ohms- load voltage:75...250 VAC- operating frequency:45 - 65 Hz- threshold voltage:0.5 V- continuous max. load current: 2 A5.3 PowerSupplies- Main PCB supply voltage:10V AC ±15%A separate secondary of the main transformer is wired to the MCSS PCB assembly viaJ5.- Doorzone signal supply voltage:+24V DC+24VDC supply voltage for the input level converter of the DZ/DZ1/DZ2 signals via J7.- Backup power:8V DC +60%Additional backup power from the DBSS is connected to J8 (not available at all DBSS systems).- RAM backup:3V Lithium batteryOn board battery backup is provided to keep the contents of RAM data between power failures。
CSS属性大全字体属性:(font)大小font-size: x-large;(特大) xx-small;(极小) 一般中文用不到,只要用数值就可以,单位:PX、PD样式font-style: oblique;(偏斜体) italic;(斜体) normal;(正常)行高line-height: normal;(正常) 单位:PX、PD、EM粗细font-weight: bold;(粗体) lighter;(细体) normal;(正常)变体font-variant: small-caps;(小型大写字母) normal;(正常)大小写text-transform: capitalize;(首字母大写) uppercase;(大写) lowercase;(小写) none;(无)修饰text-decoration: underline;(下划线) overline;(上划线) line-through;(删除线)blink;(闪烁)常用字体:(font-family)"Courier New", Courier, monospace, "Times New Roman", Times, serif, Arial, Helvetica, sans-serif, Verdana背景属性:(background)色彩background-color: #FFFFFF;图片background-image: url();重复background-repeat: no-repeat;滚动background-attachment: fixed;(固定) scroll;(滚动)位置background-position: left(水平) top(垂直);简写方法background:#000 url(..) repeat fixed left top;区块属性:(Block)字间距letter-spacing: normal; 数值对刘text-align: justify;(两端对齐) left;(左对齐) right;(右对齐) center;(居中)缩进text-indent: 数值px;垂直对齐vertical-align: baseline;(基线) sub;(下标) super;(下标) top; text-top; middle; bottom; text-bottom;词间距word-spacing: normal; 数值空格white-space: pre;(保留) nowrap;(不换行)显示display:block;(块) inline;(内嵌) list-item;(列表项) run-in;(追加部分) compact;(紧凑) marker;(标记) table; inline-table; table-raw-group; table-header-group;table-footer-group; table-raw; table-column-group; table-column; table-cell;table-caption;(表格标题)方框属性:(Box)width:; height:; float:; clear:both; margin:; padding:; 顺序:上右下左边框属性:(Border)border-style: dotted;(点线) dashed;(虚线) solid; double;(双线) groove;(槽线) ridge;(脊状) inset;(凹陷) outset;border-width:; 边框宽度border-color:#;简写方法border:width style color;列表属性:(List-style)类型list-style-type: disc;(圆点) circle;(圆圈) square;(方块) decimal;(数字) lower-roman;(小罗码数字) upper-roman; lower-alpha; upper-alpha;位置list-style-position: outside;(外) inside;图像list-style-image: url(..);定位属性:(Position)Position: absolute; relative; static;visibility: inherit; visible; hidden;overflow: visible; hidden; scroll; auto;clip: rect(12px,auto,12px,auto) (裁切)css属性代码大全一CSS文字属性:color : #999999; /*文字颜色*/font-family : 宋体,sans-serif; /*文字字体*/font-size : 9pt; /*文字大小*/font-style:itelic; /*文字斜体*/font-variant:small-caps; /*小字体*/letter-spacing : 1pt; /*字间距离*/line-height : 200%; /*设置行高*/font-weight:bold; /*文字粗体*/vertical-align:sub; /*下标字*/vertical-align:super; /*上标字*/text-decoration:line-through; /*加删除线*/text-decoration:overline; /*加顶线*/text-decoration:underline; /*加下划线*/text-decoration:none; /*删除链接下划线*/text-transform : capitalize; /*首字大写*/text-transform : uppercase; /*英文大写*/text-transform : lowercase; /*英文小写*/text-align:right; /*文字右对齐*/text-align:left; /*文字左对齐*/text-align:center; /*文字居中对齐*/text-align:justify; /*文字分散对齐*/vertical-align属性vertical-align:top; /*垂直向上对齐*/vertical-align:bottom; /*垂直向下对齐*/vertical-align:middle; /*垂直居中对齐*/vertical-align:text-top; /*文字垂直向上对齐*/vertical-align:text-bottom; /*文字垂直向下对齐*/二、CSS边框空白padding-top:10px; /*上边框留空白*/padding-right:10px; /*右边框留空白*/padding-bottom:10px; /*下边框留空白*/padding-left:10px; /*左边框留空白三、CSS符号属性:list-style-type:none; /*不编号*/list-style-type:decimal; /*阿拉伯数字*/list-style-type:lower-roman; /*小写罗马数字*/list-style-type:upper-roman; /*大写罗马数字*/list-style-type:lower-alpha; /*小写英文字母*/list-style-type:upper-alpha; /*大写英文字母*/list-style-type:disc; /*实心圆形符号*/list-style-type:circle; /*空心圆形符号*/list-style-type:square; /*实心方形符号*/list-style-image:url(/dot.gif); /*图片式符号*/list-style-position:outside; /*凸排*/list-style-position:inside; /*缩进*/四、CSS背景样式:background-color:#F5E2EC; /*背景颜色*/background:transparent; /*透视背景*/background-image : url(/image/bg.gif); /*背景图片*/ background-attachment : fixed; /*浮水印固定背景*/ background-repeat : repeat; /*重复排列-网页默认*/ background-repeat : no-repeat; /*不重复排列*/ background-repeat : repeat-x; /*在x轴重复排列*/ background-repeat : repeat-y; /*在y轴重复排列*/指定背景位置background-position : 90% 90%; /*背景图片x与y轴的位置*/ background-position : top; /*向上对齐*/background-position : buttom; /*向下对齐*/background-position : left; /*向左对齐*/background-position : right; /*向右对齐*/background-position : center; /*居中对齐*/五、CSS连接属性:a /*所有超链接*/a:link /*超链接文字格式*/a:visited /*浏览过的链接文字格式*/a:active /*按下链接的格式*/a:hover /*鼠标转到链接*/鼠标光标样式:链接手指CURSOR: hand十字体cursor:crosshair箭头朝下cursor:s-resize十字箭头cursor:move箭头朝右cursor:move加一问号cursor:help箭头朝左cursor:w-resize箭头朝上cursor:n-resize箭头朝右上cursor:ne-resize箭头朝左上cursor:nw-resize文字I型cursor:text箭头斜右下cursor:se-resize箭头斜左下cursor:sw-resize漏斗cursor:wait光标图案(IE6) p {cursor:url("光标文件名.cur"),text;}六、CSS框线一览表:border-top : 1px solid #6699cc; /*上框线*/border-bottom : 1px solid #6699cc; /*下框线*/border-left : 1px solid #6699cc; /*左框线*/border-right : 1px solid #6699cc; /*右框线*/以上是建议书写方式,但也可以使用常规的方式如下:border-top-color : #369 /*设置上框线top颜色*/border-top-width :1px /*设置上框线top宽度*/border-top-style : solid/*设置上框线top样式*/其他框线样式solid /*实线框*/dotted /*虚线框*/double /*双线框*/groove /*立体内凸框*/ridge /*立体浮雕框*/inset /*凹框*/outset /*凸框*/七、CSS表单运用:文字方块按钮复选框选择钮多行文字方块下拉式菜单选项1选项2八、CSS边界样式:margin-top:10px; /*上边界*/margin-right:10px; /*右边界值*/margin-bottom:10px; /*下边界值*/margin-left:10px; /*左边界值*/CSS 属性:字体样式(Font Style)序号中文说明标记语法1 字体样式{font:font-style font-variant font-weight font-size font-family}2 字体类型{font-family:"字体1","字体2","字体3",...}3 字体大小{font-size:数值|inherit| medium| large| larger| x-large| xx-large| small| smaller| x-small| xx-small}4 字体风格{font-style:inherit|italic|normal|oblique}5 字体粗细{font-weight:100-900|bold|bolder|lighter|normal;}6 字体颜色{color:数值;}7 阴影颜色{text-shadow:16位色值}8 字体行高{line-height:数值|inherit|normal;}9 字间距{letter-spacing:数值|inherit|normal}10 单词间距{word-spacing:数值|inherit|normal}11 字体变形{font-variant:inherit|normal|small-cps }12 英文转换{text-transform:inherit|none|capitalize|uppercase|lowercase}13 字体变形{font-size-adjust:inherit|none}14 字体{font-stretch:condensed|expanded|extra-condensed|extra-expanded|inherit|narrower |normal| semi-condensed|semi-expanded|ultra-condensed|ultra-expanded|wider}文本样式(Text Style)序号中文说明标记语法1 行间距{line-height:数值|inherit|normal;}2 文本修饰{text-decoration:inherit|none|underline|overline|line-through|blink}3 段首空格{text-indent:数值|inherit}4 水平对齐{text-align:left|right|center|justify}5 垂直对齐{vertical-align:inherit|top|bottom|text-top|text-bottom|baseline|middle|sub|super} 6 书写方式{writing-mode:lr-tb|tb-rl}背景样式序号中文说明标记语法1 背景颜色{background-color:数值}2 背景图片{background-image: url(URL)|none}3 背景重复{background-repeat:inherit|no-repeat|repeat|repeat-x|repeat-y}4 背景固定{background-attachment:fixed|scroll}5 背景定位{background-position:数值|top|bottom|left|right|center}6 背影样式{background:背景颜色|背景图象|背景重复|背景附件|背景位置}框架样式(Box Style)序号中文说明标记语法1 边界留白{margin:margin-top margin-right margin-bottom margin-left}2 补白{padding:padding-top padding-right padding-bottom padding-left}3 边框宽度{border-width:border-top-width border-right-width border-bottom-width border-left-width}宽度值:thin|medium|thick|数值4 边框颜色{border-color:数值数值数值数值}数值:分别代表top、right、bottom、left 颜色值5 边框风格{border-style:none|hidden|inherit|dashed|solid|double|inset|outset|ridge|groove}6 边框{border:border-width border-style color}上边框{border-top:border-top-width border-style color}右边框{border-right:border-right-width border-style color}下边框{border-bottom:border-bottom-width border-style color}左边框{border-left:border-left-width border-style color}7 宽度{width:长度|百分比| auto}8 高度{height:数值|auto}9 漂浮{float:left|right|none}10 清除{clear:none|left|right|both}分类列表序号中文说明标记语法1 控制显示{display:none|block|inline|list-item}2 控制空白{white-space:normal|pre|nowarp}3 符号列表{list-style-type:disc|circle|square|decimal|lower-roman|upper-roman|lower-alpha|up per-alpha|none}4 图形列表{list-style-image:URL}5 位置列表{list-style-position:inside|outside}6 目录列表{list-style:目录样式类型|目录样式位置|url}7 鼠标形状{cursor:hand|crosshair|text|wait|move|help|e-resize|nw-resize|w-resize|s-resize|se-r esize|sw-resize}posted @ 2009-06-08 13:39 DELPHI&.NET初学者[TECSOON WENDAY] 阅读(143) | 评论(0) |编辑表单验证代码全集1:js 字符串长度限制、判断字符长度、js限制输入、限制不能输入、textarea 长度限制2.:js判断汉字、判断是否汉字、只能输入汉字3:js判断是否输入英文、只能输入英文4:js只能输入数字,判断数字、验证数字、检测数字、判断是否为数字、只能输入数字5:只能输入英文字符和数字6: js email验证、js 判断email 、信箱/邮箱格式验证7:js字符过滤,屏蔽关键字8:js密码验证、判断密码2.1: js 不为空、为空或不是对象、判断为空、判断不为空2.2:比较两个表单项的值是否相同2.3:表单只能为数字和"_",2.4:表单项输入数值/长度限定2.5:中文/英文/数字/邮件地址合法性判断2.6:限定表单项不能输入的字符2.7表单的自符控制2.8:form文本域的通用校验函数1. 长度限制<script>function test(){if(document.a.b.value.length>50){alert("不能超过50个字符!");document.a.b.focus();return false;}}</script><form name=a onsubmit="return test()"><textarea name="b" cols="40" wrap="VIRTUAL" rows="6"></textarea><input type="submit" name="Submit" value="check"></form>2. 只能是汉字<input onkeyup="value="/oblog/value.replace(/[^\u4E00-\u9FA5]/g,'')">3." 只能是英文<script language=javascript>function onlyEng(){if(!(event.keyCode>=65&&event.keyCode<=90))event.returnvalue=false;}</script><input onkeydown="onlyEng();">4. 只能是数字<script language=javascript>function onlyNum(){if(!((event.keyCode>=48&&event.keyCode<=57)||(event.keyCode>=96&&event.key Code<=105)))//考虑小键盘上的数字键event.returnvalue=false;}</script><input onkeydown="onlyNum();">5. 只能是英文字符和数字<input onkeyup="value="/oblog/value.replace(/[\W]/g,"'')"onbeforepaste="clipboardData.setData('text',clipboardData.getData('text').replace(/[ ^\d]/g,''))">6. 验证邮箱格式<SCRIPT LANGUAGE=javascript RUNAT=Server>function isEmail(strEmail) {if(strEmail.search(/^\w+((-\w+)|(\.\w+))*\@[A-Za-z0-9]+((\.|-)[A-Za-z0-9]+)*\.[A-Z a-z0-9]+$/) != -1)return true;elsealert("oh");}</SCRIPT><input type=text onblur=isEmail(this.value)>7. 屏蔽关键字(这里屏蔽***和****)<script language="javascript1.2">function test() {if((a.b.value.indexOf ("***") == 0)||(a.b.value.indexOf ("****") == 0)){alert(":)");a.b.focus();return false;}}</script><form name=a onsubmit="return test()"><input type=text name=b><input type="submit" name="Submit" value="check"></form>8. 两次输入密码是否相同<FORM METHOD=POST ACTION=""><input type="password" id="input1"><input type="password" id="input2"><input type="button" value="test" onclick="check()"></FORM><script>function check(){with(document.all){if(input1.value!=input2.value){alert("false")input1.value = "";input2.value = "";}else document.forms[0].submit();}}</script>够了吧:)屏蔽右键很酷oncontextmenu="return false" ondragstart="return false" onselectstart="return false" 加在body中二2.1 表单项不能为空<script language="javascript"><!--function CheckForm(){if (.value.length == 0) {alert("请输入您姓名!");.focus();return false;}return true;}--></script>2.2 比较两个表单项的值是否相同<script language="javascript"><!--function CheckForm()if (document.form.PWD.value != document.form.PWD_Again.value) {alert("您两次输入的密码不一样!请重新输入.");document.ADDUser.PWD.focus();return false;}return true;}--></script>2.3 表单项只能为数字和"_",用于电话/银行帐号验证上,可扩展到域名注册等<script language="javascript"><!--function isNumber(String){var Letters = "1234567890-"; //可以自己增加可输入值var i;var c;if(String.charAt( 0 )=='-')return false;if( String.charAt( String.length - 1 ) == '-' )return false;for( i = 0; i < String.length; i ++ ){c = String.charAt( i );if (Letters.indexOf( c ) < 0)return false;}return true;}function CheckForm(){if(! isNumber(document.form.TEL.value)) {alert("您的电话号码不合法!");document.form.TEL.focus();return false;}return true;}--></script>2.4 表单项输入数值/长度限定<script language="javascript">function CheckForm(){if (document.form.count.value > 100 || document.form.count.value < 1) {alert("输入数值不能小于零大于100!");document.form.count.focus();return false;}if (document.form.MESSAGE.value.length<10){alert("输入文字小于10!");document.form.MESSAGE.focus();return false;}return true;}//--></script>2.5 中文/英文/数字/邮件地址合法性判断<SCRIPT LANGUAGE="javascript"><!--function isEnglish(name) //英文值检测{if(name.length == 0)return false;for(i = 0; i < name.length; i++) {if(name.charCodeAt(i) > 128)return false;}return true;}function isChinese(name) //中文值检测{if(name.length == 0)return false;for(i = 0; i < name.length; i++) {if(name.charCodeAt(i) > 128)return true;return false;}function isMail(name) // E-mail值检测{if(! isEnglish(name))return false;i = name.indexOf(" at ");j = name dot lastIndexOf(" at ");if(i == -1)return false;if(i != j)return false;if(i == name dot length)return false;return true;}function isNumber(name) //数值检测{if(name.length == 0)return false;for(i = 0; i < name.length; i++) {if(name.charAt(i) < "0" || name.charAt(i) > "9") return false;}return true;}function CheckForm(){if(! isMail(form.Email.value)) {alert("您的电子邮件不合法!");form.Email.focus();return false;}if(! isEnglish(.value)) {alert("英文名不合法!");.focus();return false;}if(! isChinese(name.value)) {alert("中文名不合法!");name.focus();return false;}if(! isNumber(form.PublicZipCode.value)) {alert("邮政编码不合法!");form.PublicZipCode.focus();return false;}return true;}//--></SCRIPT>2.6 限定表单项不能输入的字符<script language="javascript"><!--function contain(str,charset)// 字符串包含测试函数{var i;for(i=0;i<charset.length;i++)if(str.indexOf(charset.charAt(i))>=0)return true;return false;}function CheckForm(){if ((contain(.value, "%\(\)><")) || (contain(document.form.MESSAGE.value, "%\(\)><"))) {alert("输入了非法字符");.focus();return false;}return true;}//--></script>1. 检查一段字符串是否全由数字组成---------------------------------------<script language="Javascript"><!--function checkNum(str){return str.match(/\D/)==null} alert(checkNum("1232142141"))alert(checkNum("123214214a1"))// --></script>2. 怎么判断是否是字符---------------------------------------if (/[^\x00-\xff]/g.test(s)) alert("含有汉字");else alert("全是字符");3. 怎么判断是否含有汉字---------------------------------------if (escape(str).indexOf("%u")!=-1) alert("含有汉字"); else alert("全是字符");4. 邮箱格式验证---------------------------------------//函数名:chkemail//功能介绍:检查是否为Email Address//参数说明:要检查的字符串//返回值:0:不是1:是function chkemail(a){ var i=a.length;var temp = a.indexOf('@');var tempd = a.indexOf('.');if (temp > 1) {if ((i-temp) > 3){if ((i-tempd)>0){return 1;}}}return 0;}5. 数字格式验证---------------------------------------//函数名:fucCheckNUM//功能介绍:检查是否为数字//参数说明:要检查的数字//返回值:1为是数字,0为不是数字function fucCheckNUM(NUM){var i,j,strTemp;strTemp="0123456789";if ( NUM.length== 0)return 0for (i=0;i<NUM.length;i++){j=strTemp.indexOf(NUM.charAt(i)); if (j==-1){//说明有字符不是数字return 0;}}//说明是数字return 1;}6. 电话号码格式验证--------------------------------------- //函数名:fucCheckTEL//功能介绍:检查是否为电话号码//参数说明:要检查的字符串//返回值:1为是合法,0为不合法function fucCheckTEL(TEL){var i,j,strTemp;strTemp="0123456789-()# ";for (i=0;i<TEL.length;i++){j=strTemp.indexOf(TEL.charAt(i)); if (j==-1){//说明有字符不合法return 0;}}//说明合法return 1;}7. 判断输入是否为中文的函数--------------------------------------- function ischinese(s){var ret=true;for(var i=0;i<s.length;i++)ret=ret && (s.charCodeAt(i)>=10000); return ret;}8. 综合的判断用户输入的合法性的函数---------------------------------------<script language="javascript">//限制输入字符的位数开始//m是用户输入,n是要限制的位数function issmall(m,n){if ((m<n) && (m>0)){return(false);}else{return(true);}}9. 判断密码是否输入一致--------------------------------------- function issame(str1,str2){if (str1==str2){return(true);}else{return(false);}}10. 判断用户名是否为数字字母下滑线--------------------------------------- function notchinese(str){var reg=/[^A-Za-z0-9_]/gif (reg.test(str)){return (false);}else{return(true); }}2.8. form文本域的通用校验函数---------------------------------------作用:检测所有必须非空的input文本,比如姓名,账号,邮件地址等等。
LMCSS安装参数表页数:Page 1 of 13 日期:2005/1Translated by:翻译: YAN JUN严 军Checked by: XU WEIBIN检查: 许 伟 斌Approved by:批准:WU PENG吴 鹏Motion Control Board With LMCSSInstallation ParametersLMCSS安装参数(翻译版)P1230314AAB09 January, 1997Otis document configuration number 80049WARNINGThe “Default value” specified for the parameters within this document are provided as a template for the contracting process. These settings do not always represent the default settings for a specific contract and; therefore, should not be used for that purpose.NONDISCLOSURE WARNINGThis work contains proprietary information and is the property of Otis Elevator Company. It is distributed only to those employees with a need to know the information and it may not be reproduced,LMCSS安装参数表页数:Page 2 of 13 日期:2005/1Translated by:翻译: YAN JUN严 军Checked by: XU WEIBIN检查: 许 伟 斌Approved by:批准:WU PENG吴 鹏disclosed, or distributed to any person outside the employ of Otis Elevator Company without written authorization from an officer thereof. Otis competitors, customers, former employees, retirees, members of the general public and consultants not bound by a written nondisclosure agreement are among those outside the employ of Otis. In the event that an employee in the possession of this work no longer needs the information, retires, resigns is terminated or laid off from Otis, or in the event that a person outside the employ of Otis comes into possession of this work, such employee or person should destroy the work or return it to Otis.Any unauthorized reproduction, disclosure, or distribution by an person of any portion of this work may be a breach of duty owed by such person to Otis Elevator Company and could result in damages actionable at law.PROHIBITION ON COPYINGAny unauthorized reproduction, disclosure, or distribution of copies by any person of any portion of this work may be a violation of Copyright Law of the United States of America and other countries, could result in the awarding of Statutory Damages of up to $100,000 (17 USC 504) for infringement and may result in further civil and criminal penalties. All rights reserved.LMCSS安装参数表页数:Page 3 of 13 日期:2005/1Translated by:翻译: YAN JUN严 军Checked by: XU WEIBIN检查: 许 伟 斌Approved by:批准:WU PENG吴 鹏Revision HistoryDate AuthorDescription05-Jul-96 H. Vela Original document - transfered from Spec 90 23-Aug-96 LH. Sim Modified for 300VF09-Jan-97 H. Vela Hong Kong Door Lock addition2005年1月18 日严军(BOEC)中文翻译LMCSS安装参数表页数:Page 4 of 13 日期:2005/1Translated by:翻译: YAN JUN严 军Checked by: XU WEIBIN检查: 许 伟 斌Approved by:批准:WU PENG吴 鹏TOP FLOOR Number of the Top Floor (<=Bottom Floor+53).顶层楼层号(〈=53〉BOTTOM FLOOR Number of the Bottom Floor (>=0).底层楼层号(>=0).COUNTRY AJC Country Identification (0=America 1=Japan 2=Germany).国家标志(0=美国,1=日本,2=德国)ENABLE ADO Advanced Door Opening Enable Function (0=Disable 1=Enable).是否允许提前开门(0=禁止,1=允许)ENABL RELEVEL NY Releveling Enable Function (0=Disable 1=Enable). 是否允许再平层(0=禁止,1=允许)ADV BRK LFT Advanced Brake Lift (0=Disable 1=Enable).是否提前打开抱闸(0=禁止,1=允许)DOOR TYPE Selection for DCSS (0=DISS 1=DO2000/HPDS).选择门系统类型(0=DISS门系统,1=DO2000/HPDS门系统)DRIVE TYPE Selection for DBSS (0=MSWL 1=MSVF 2=MSDD 3=VFHD).选择驱动系统类型(0=MSWL系统,1=MSVF系统,2=MSDD系统,3=VFHD系统)OCSS ICD version OCSS ICD Version (0=Version 3.3,4.0 1=Version 3.0).OCSS ICD版本号(0=3.3,4.0版本;1=3.0版本)CAR NON START [s] Car Non Start Time (DDP time).轿厢0速时间(DDP时间)MAN. DECEL TIME Maximum time to shutdown after Manual Run.手动运行的最大减速时间No. of DZ in 1LS Number of Door Zones insides 1LS Switch.在1LS开关内的门区数目No. of DZ in 2LS Number of Door Zones insides 2LS Switch.在2LS开关内的门区数目Abs oversp % NOR Normal Run’s Absolute Overspeed Percentage.正常运行时的绝对超速的百分比Abs oversp % INS Inspection Run’s Absolute Overspeed Percentage.检修运行时的绝对超速的百分比Abs oversp % REC Recover Run’s Absolute Overspeed Percentage.救援运行时的绝对超速的百分比Abs oversp % REI Reinitialize Run’s Absolute Overspeed Percentage.LMCSS安装参数表页数:Page 5 of 13 日期:2005/1Translated by:翻译: YAN JUN严 军Checked by: XU WEIBIN检查: 许 伟 斌Approved by:批准:WU PENG吴 鹏初始化运行时的绝对超速的百分比Abs oversp % JPSDO JPSDO Run’s Absolute Overspeed Percentage.JPSDO运行时的绝对超速的百分比Track err % NOR Normal Run’s Dictated and Measured Speed Difference.正常运行中指示速度和实测速度的误差百分比Track err % INS Inspection Run’s Dictated and Measured Speed Difference.检修运行中指示速度和实测速度的误差百分比Trach err % LOW Slow Run’s Dictated and Measured Speed Difference.慢速运行中指示速度和实测速度的误差百分比NTSD percent Percentage of Nominal Speed for NTSD Relay switching.NTSD继电器动所时的速度相对于额定速度的百分比ETSD percent Percentage of Nominal Speed for ETSD Relay switching.ETSD继电器动所时的速度相对于额定速度的百分比Enable ETSD NY Enable ETSD Relay (0= Disable 1=Enable).允许ETSD继电器(0=禁止,1=允许)PTR drop delay Prepare To Run Drop Delay Time (x10ms).准备运行释放继电器时间(x10ms).max# Abs overspd Maximum no. of Absolute Overspeed Faults.绝对超速故障的最大故障数max# track. retry Maximum no. of Tracking Faults.跟踪故障的最大故障数max# NTSD faults Maximum no. of NTSD Faults.NTSD故障的最大故障数max# ETSD faults Maximum no. of ETSD Faults.ETSD故障的最大的故障数max# tract. loss Maximum no. of Traction Loss Faults.跟踪丢失故障的最大故障数max# UX DX fault Maximum no. of UX/DX Relay Faults.UX/DX继电器故障的最大故障数max# Pos faults Maximum no. of Position Faults.位置故障的最大故障数max# PVT faults Maximum no. of Primary Velocity Transducer Faults.第一速度传感器故障的最大故障数max# ADO retries Maximum no. of Advanced Door Opening Retry Faults.LMCSS安装参数表页数:Page 6 of 13 日期:2005/1Translated by:翻译: YAN JUN严 军Checked by: XU WEIBIN检查: 许 伟 斌Approved by:批准:WU PENG吴 鹏提前开门继电器故障的最大故障数max# EES faults Maximum no. of EES Faults.EES故障的最大故障数max# rdyrun tout Maximum no. of Ready To Run Timeouts.准备运行超时的最大记录数max# brake tout Maximum no. of Brake Lifted Timeouts.抱闸打开超时的最大记录数max# adv brk flt Maximum no. of Advanced Brake Faults.提前打开抱闸故障的最大故障数max# drive fault Maximum no. of Drive Faults.驱动故障的最大故障数max# unsafe start Maximum no. of Unsafe To Start Faults.不安全的启动故障的最大故障数max# DBD faults Maximum no. of DBD input Errors.DBD输入错误的最大故障数max# relevel runs Maximum no. of Releveling Runs between Normal Runs.在正常运行中再平层运行的最大记录数measure task no. Task Number for Run Time Measurement.运行时间中记录的任务数Relay delay time Relay Delay after feedback indicates U or D is energized (x10ms).U/D继电器自吸合至反馈回信号的延迟时间(x10ms).VHF CNS test Car non start test for VFHydro (0=Normal Mode 1= CNS Test Mode).变频液压梯的轿厢0速测试(0=正常模式,1=CNS测试模式)PreJerk Ramp Dlt Δ(Initial Velocity) to increment Per 20ms cycle.Δ(初始速度)每20ms一周期的增量PreJerk Ramp Cyc Number of 20ms cycles to increment the Initial Velocity.初始速度每20ms一周期的增量累计次数En Pre-Jerk Vel Prejerkin Stiction handling Enable Function (0=Disable 1=Enable).是否允许预加加速功能(0=禁用,1=允许)VELOCITY NORMAL Nominal Velocity for Normal Run.正常运行的额定速度ACCELERA NORMAL Nominal Acceleration for Normal Run.正常运行的额定加速度JERK NORMAL Nominal Jerk for Normal Run.LMCSS安装参数表页数:Page 7 of 13 日期:2005/1Translated by:翻译: YAN JUN严 军Checked by: XU WEIBIN检查: 许 伟 斌Approved by:批准:WU PENG吴 鹏正常运行的额定加加速度VELOCITY INSPECT Nominal Velocity for Inspection Run.检修运行的额定速度ACCELERA INSPECT Nominal Acceleration for Inspection Run.检修运行的额定加速度VELOCITY LEARN Nominal Velocity for Learn Run.自学习运行的额定速度ACCELERA LEARN Nominal Acceleration for Learn Run.自学习运行的额定加速度VELOCITY RELEVEL Nominal Velocity for Releveling Run and Reinitialization Run (to final floor level).再平层运行和初始化运行(至最底楼层)的额定速度ACCELERA RELEVEL Nominal Acceleration for Releveling Run and Reinitialization Run (to final floor level).再平层运行和初始化运行(至最底楼层)的额定加速度VELOCITY RECOVER Nominal Velocity for Recover Run.救援运行的额定速度ACCELERA RECOVER Nominal Acceleration for Recover Run.救援运行的额定加速度VELOCITY SLOW Intermediate Velocity for Reinitialization Run (Velocity Normal>=Velocity Slow>=Velocity Relevel).初始化运行的中间速度(正常速度>=慢速>=再平层速度).VELOCITY REINIT Nominal Velocity for Reinitialization Run.初始化运行的额定速度ACCELERA REINIT Nominal Acceleration for Reinitialization Run deceleration from Nominal Velocity (actual speed) to Velocity Slow.初始化运行中从额定速度到慢速的额定减速度ACCELERA NTSD Acceleration during NTSD Operation.在NTSD操作期间的加速度JERK TIMED Nominal Jerk for Timed Dictated Profiles.时间曲线中的额定加加速度VELOC profile 2 Nominal Velocity for Profile 2 Normal Run.第二正常运行曲线的额定速度ACCEL profile 2 Nominal Acceleration for Profile 2 Normal Run.第二正常运行曲线的额定加速度JERK profile 2 Nominal Jerk for Profile 2 Normal Run.LMCSS安装参数表页数:Page 8 of 13 日期:2005/1Translated by:翻译: YAN JUN严 军Checked by: XU WEIBIN检查: 许 伟 斌Approved by:批准:WU PENG吴 鹏第二正常运行曲线的额定加加速度VELOC profile 3 Nominal Velocity for Profile 3 Normal Run.第三正常运行曲线的额定速度ACCEL profile 3 Nominal Acceleration for Profile 3 Normal Run.第三正常运行曲线的额定加速度JERK profile 3 Nominal Jerk for Profile 3 Normal Run.第三正常运行曲线的额定加加速度VELOCITY ZERO Stopping Velocity.停止速度JPSDO TYPE TBA Type of Japanese Potential Slow Down Operation (0=JPSDO at Top Position 1=JPSDO at BottomPosition 2=JPSDO at all Terminal Positions).日本电位慢降强迫换速操作类型(0=JPSDO在上端站,1=JPSDO在下端站,2=JPSDO在两个端站)VELOCITY JPSDO Nominal Velocity for JPSDO (1<=Velocity Normal; 0=Disable JPSDO).JPSDO状态的额定速度(1<=正常速度; 0=禁用 JPSDO).GAIN FIXED POSCT Gain for Fixed Gain Position Control.固定增益位置控制的增益DELTA TC [ms] Δ(TC) Control Delay (ms).Δ(TC)控制延迟(ms).DECEL / ACCEL % Deceleration/Acceleration Ratio.减速度/加速度比率DESTINATION LEAD Destination (Target Floor) Lead Distance (mm).到目标层减小的爬行距离DESTINATION LAG Destination (Target Floor) Lag Distance (mm).到目标层增加的爬行距离LEVEL TOLERANCE Allowed Leveling Tolerance at Floor (mm).允许的平层误差ZERO SPEED TIME Duration for Zero Speed Dictation after Deceleration.减速后保持在零速的时间BKL to MOV tout Timeout between Brake Lifted and Car Moving (x10ms).从抱闸打开到轿厢运动的时限(x10ms).POSITION DISPLMT Position Displacement to account for DZ1/DZ2 Switches Hysteresis.为防止DZ1/DZ2开关磁滞的允许位移极限1LS2LS TOLERANCE Tolerance for 1LS/2LS Switches in hoistway.井道中1LS/2LS的允许误差值LMCSS安装参数表页数:Page 9 of 13 日期:2005/1Translated by:翻译: YAN JUN严 军Checked by: XU WEIBIN检查: 许 伟 斌Approved by:批准:WU PENG吴 鹏SLIPPAGE TOLERAN Slippage (Position Recalibration) Tolerance for Error Loging (big Slippage detection).绳滑移允许误差(相对于故障记录中的大尺寸滑移)COUNTS PER REVOL Encoder Pulses Per Motor Revolution.电机每转的编码器脉冲数MOTOR SPEED Motor Speed in Revolutions Per Minute.每分钟的电机转数PreJerk Pos Delt No. of PVT counts of movement to wait for while dictacting PreJerk Velocity.等待进入预加加速时PVT的计数次数ASCB Available Choice of ASCB availability (0=Not available 1=Available). 是否可用ASCB?(0=不可用,1=可用)HKDL Available Choice of HKDL availability (0=Not available 1=Available)是否可用HKDL?(0=不可用,=可用)HKDL Cycle Cnt Number of times the Hong Kong Door lock should be cycled before shutting down in case of lock fault 一旦门锁故障,在电梯进入死机状态前香港门锁将循环重试的次数。