电动自行车用永磁无刷直流电机选型及结构参数设计
1.油泥模型电机参数分析
油泥模型的电机设计为38齿牙盘,其转子内径为111mm,电机铁心长度为14mm。其参数见表1。
表1 方案1电机参数表
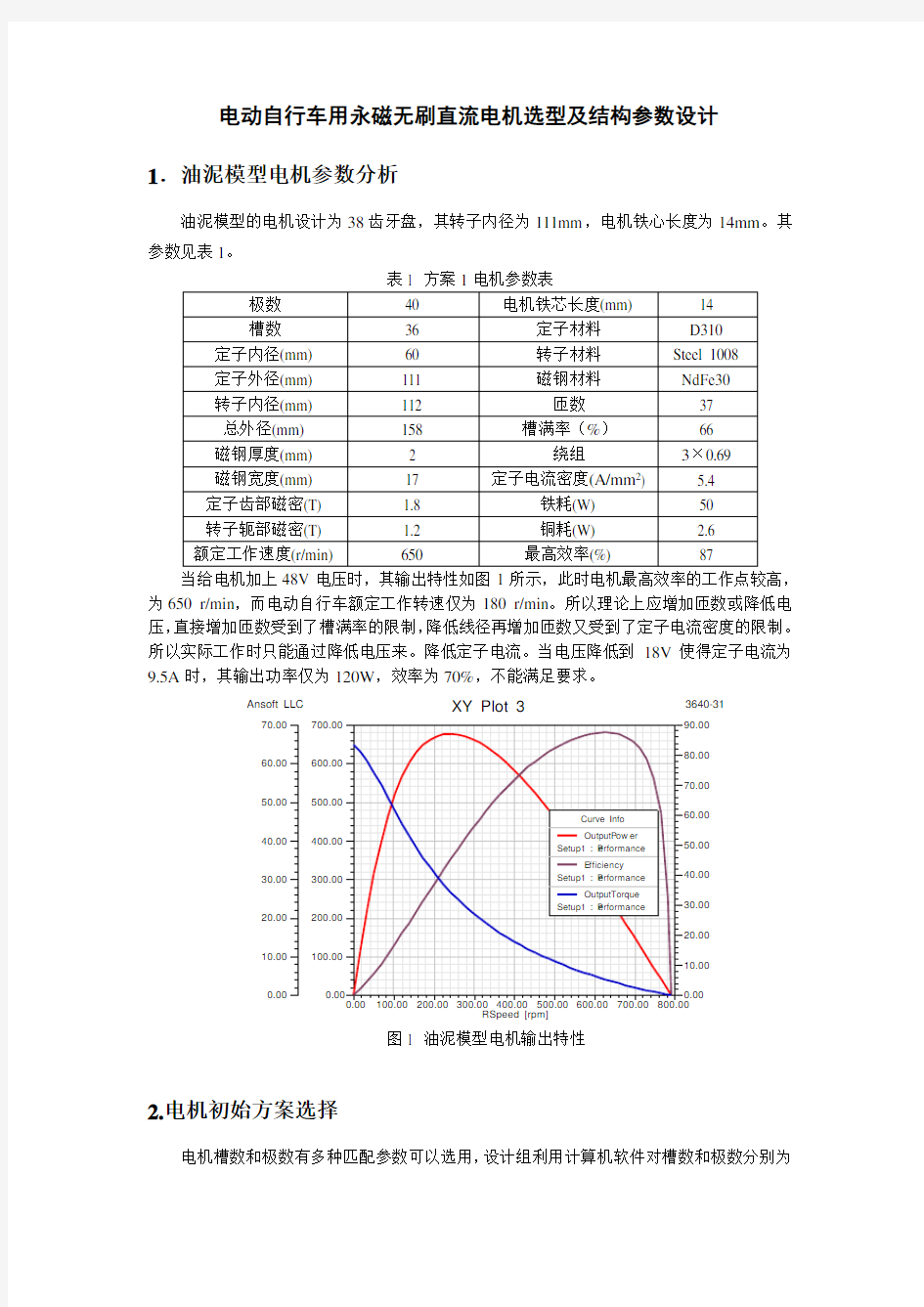
当给电机加上48V电压时,其输出特性如图1所示,此时电机最高效率的工作点较高,为650 r/min,而电动自行车额定工作转速仅为180 r/min。所以理论上应增加匝数或降低电压,直接增加匝数受到了槽满率的限制,降低线径再增加匝数又受到了定子电流密度的限制。所以实际工作时只能通过降低电压来。降低定子电流。当电压降低到18V使得定子电流为9.5A时,其输出功率仅为120W,效率为70%,不能满足要求。
图1 油泥模型电机输出特性
2.电机初始方案选择
电机槽数和极数有多种匹配参数可以选用,设计组利用计算机软件对槽数和极数分别为
36/24、36/40、42/46的电机进行了参数仿真,并对结果进行了分析。结论表明,极数为24的电机极数太少,导致磁钢较宽(17mm),加工困难。另外,由于24极数的电机额定工作速度太高,其低速时效率较低,因此不适合采用。
2.1推荐方案定子、转子参数的确定
推荐方案的定子槽、转子极数分别为36/40,定子绕组为0.69漆包线3股33匝,如表2所示。
表2推荐方案电机参数表
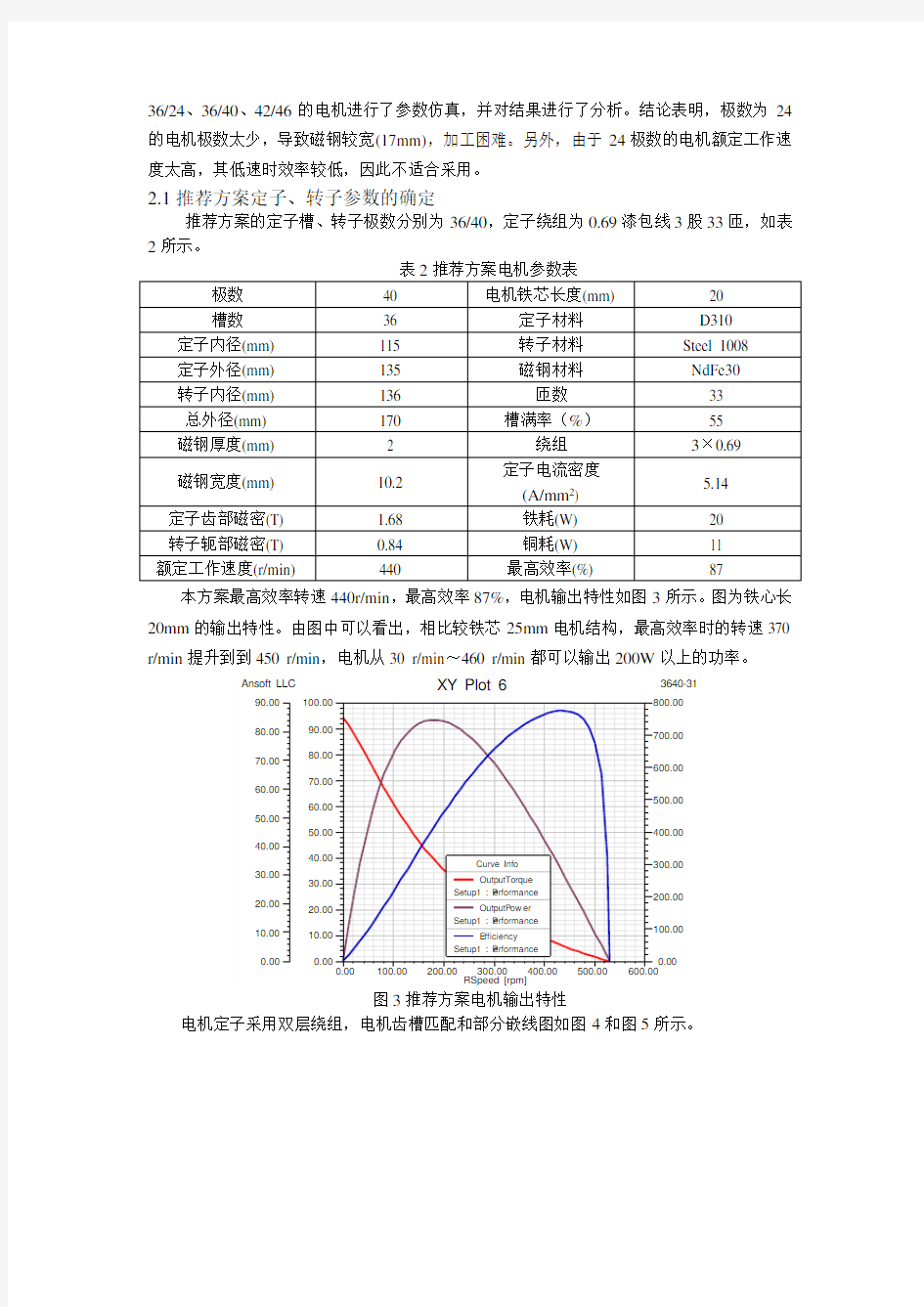
本方案最高效率转速440r/min,最高效率87%,电机输出特性如图3所示。图为铁心长20mm的输出特性。由图中可以看出,相比较铁芯25mm电机结构,最高效率时的转速370 r/min提升到到450 r/min,电机从30 r/min~460 r/min都可以输出200W以上的功率。
图3推荐方案电机输出特性
电机定子采用双层绕组,电机齿槽匹配和部分嵌线图如图4和图5所示。
图4 电机齿槽匹配图
图5 电机嵌线图
三相磁链曲线如图6所示。
Maxwell2DDesign1
20.00
图6 三相磁链曲线图7 电机剖分网格
建立好电机四分之一有限元模型后,把电机分为五部分进行网格剖分。电枢绕组网格的最大步长为2.3mm,磁钢网格的最大步长为1mm,主体网格的最大步长1.5mm,磁钢网格的最大步长0.068mm,气隙网格的最大步长为0.075mm。剖分的网格如图7所示进行分析后,其磁力线如图8所示。
(a)0s时(b)0.02s时
图8 磁力线分布图
电机的局部磁密分布图如图9所示。由图中可以看出,电机定子、转子最大磁密未超过1.7T,即定子和转子未出现磁饱和现象。
(a)0s时(b)0.02s时
图9 局部磁密分布图
(a)0s时(b)0.02s时
图10局部磁密分布矢量图
2.2推荐方案参数调整分析
由于推荐方案的最高效率时的转速为440 r/min,为了进一步降低最高效率的转速,可以采取三种措施:
①在保证槽满率不是太高的情况下,增加绕组匝数并减小绕组线径。
绕组匝数为58匝时电机输出特性如图11所示,电机最高效率时的转速为200 r/min,
可是此时的输出功率不足100W,不能满足设计要求。因此,本方案不适合采用。
图11增加匝数时电机输出特性
②增加定子铁芯轴向长度
定子铁芯长为25mm时的电机输出特性如图12所示。对比图3可以看出,本方案最高效率使得转速降低到370 r/min,而且限流为9A时的功率也可以增加至180W。因此,在安装空间不受限制的情况下,应尽可能增加电机轴向长度。
图12 铁心长为25mm的输出特性
③增加极数和槽数的调整
定子槽、转子极数分别为42/46电机参数见表3。
本方案采用0.69漆包线3股33匝,磁钢宽为9mm,定子齿宽3.5mm,磁密1.85T,最
高效率87%,转速为360r/min,性能和推荐方案相似。输出特性如图13所示。
图13 方案5电机输出特性
在有限的定子外径上选择电机槽数时,应考虑定子结构强度和加工工艺。太多的槽数会导致定子齿太窄而难以加工,强度也难以达到要求。本方案相对于推荐方案来说齿数槽数较多,加工制造工艺复杂,成本高。
3低速时效率参数和功率参数的校核
上述仿真时是假设电机两端直接加在48V电源上的,此时电枢电流过大引起定子的铁耗和铜耗增加,电机在250 r/min以下时效率低于80%。电动自行车电机实际工作时应配合带有限流电路的控制器使用,以实现低速时的过载保护和恒转矩输出。下面根据设计要求的效率参数和功率参数对上述方案进行改进。
4.1推荐方案的校核
若输入24V电压,180 r/min时输出175W功率,效率为78%。此时为3股φ0.69的漆包线并绕,定子电流密度约为8.2A/mm2,若增加匝数减小线径则会出现电流密度过大,减少匝数会导致最高效率的转速太高,低速时电流过大,转矩过小。
4.2推荐方案定子铁芯加长为25mm时的校核
由定子铁芯加长后的输出特性可知,在电机两端加48V直流电,电机输出功率约为200W 时,转速为370 r/min,此时减小电动自行车调速开关即可降低电机转速。当电机PWM控制器控制输入电压的有效值为32V时,电机可在180 r/min时输出280W功率,此时电机效率为75%,达不到设计要求。降低电压有效值至30V时,可以在180 r/min时输出230W功率,此时效率依然为75%。继续降低电压至29V时,在180 r/min时仅能输出170W功率,此时效率依然为77%,由于功率和效率都太小达不到设计要求。
为了提高电机在180 r/min时效率,可以通过适当增加匝数降低电机最高效率时的转速来进行,当绕组线圈由φ0.69×31匝提升至φ0.69×35匝时,绕组槽满率由55%提升至62%。当输入32V电压时,180 r/min时输出160W功率,效率为78%。此时若通过提高输入电压来提高功率,则电机效率降低;若降低电压来提升电机效率,则功率降低。继续升高匝数又有槽满率约束也是如此。
因为定子铁芯加长后的最优设计方案为:绕组线圈为φ0.71×31匝,绕组槽满率为58%。
若输入28V电压,180 r/min时输出190W功率,效率为79%。
4基于SIMPLORER的联合仿真模型的建立
采用仿真软件MAXWELL(有限元电磁场仿真软件)与SIMPLORER(电路仿真软件)可共同构建BLDC电机控制系统的FEA(电磁场有限元仿真)模型,并通过SIMPLORER 与MAXWELL的联机仿真,来获得所设计电机的仿真结果。联机仿真模型如图14所示。
A
B
C
26-30彪,31匝不彪
图17电机在180 r/min时输出转矩(-0.5°)
在较低转速,例如100 r/min时,电机输出转矩如图18所示(初始角0.5),转矩仍约为8Nm左右。
图18电机在100r/min时输出转矩
5结论
通过对各方案电机设计参数的比较可知:
推荐方案设计的40极36槽分数槽绕组BLDC电机最高本体效率为87%,最高系统效率可达80%左右,在180r/min时可输出8Nm转矩,功率为150W。因此,主要考虑成本时推荐推荐方案为首选方案。
若果能进一步增加定子铁芯的轴向长度至25mm,则:
推荐方案设计的40极36槽分数槽绕组BLDC电机最高本体效率为88%,最高系统效率可达83%左右,在180r/min时可输出9Nm转矩,功率为188W,可以达到设计要求。因此,主要考虑成本时推荐推荐方案为首选方案。
永磁无刷直流电动机的基本工作原理 无刷直流电动机由电动机主体和驱动器组成,是一种典型的机电一体化产品。 1. 电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。 无刷直流电动机的原理简图如图一所示: 永磁无刷直流电动机的基本工作原理 主电路是一个典型的电压型交-直-交电路,逆变器提供等幅等频5-26KHZ调制波的对称交变矩形波。 永磁体N-S交替交换,使位置传感器产生相位差120°的U、V、W方波,结合正/反转信号产生有效的六状态编码信号:101、100、110、010、011、001,通过逻辑组件处理产生T1-T4导通、T1-T6导通、T3-T6导通、T3-T2导通、T5-T2导通、T5-T4导通,也就是说将直流母线电压依次加在A+B-、A+C-、B+C-、B+A-、C+A-、C+B-上,这样转子每转过一对N-S极,T1-T6功率管即按固定组合成六种状态的依次导通。每种状态下,仅有两相绕组通电,依次改变一种状态,定子绕组产生的磁场轴线在空间转动60°电角度,转子跟随定子磁场转动相当于60°电角度空间位置,转子在新位置上,使位置传感器U、V、W按约定产生一组新编码,新的编码又改变了功率管的导通组合,使定子绕组产生的磁场轴再前进60°电角度,如此循环,无刷直流电动机将产生连续转矩,拖动负载作连续旋转。正因为无刷直流电动机的换向是自身产生的,而不是由逆变器强制换向的,所以也称作自控式同步电动机。 2. 无刷直流电动机的位置传感器编码使通电的两相绕组合成磁场轴线位置超前转子磁场轴线位置,所以不论转子的起始位置处在何处,电动机在启动瞬间就会产生足够大的启动转矩,因此转子上不需另设启动绕组。 由于定子磁场轴线可视作同转子轴线垂直,在铁芯不饱和的情况下,产生的平均电磁转矩与绕组电流成正比,这正是他励直流电动机的电流-转矩特性。 电动机的转矩正比于绕组平均电流: Tm=KtIav (N·m) 电动机两相绕组反电势的差正比于电动机的角速度: ELL=Keω (V) 所以电动机绕组中的平均电流为: Iav=(Vm-ELL)/2Ra (A) 其中,Vm=δ·VDC是加在电动机线间电压平均值,VDC是直流母线电压,δ是调制波的占空比,Ra为每相绕组电阻。由此可以得到直流电动机的电磁转矩: Tm=δ·(VDC·Kt/2Ra)-Kt·(Keω/2Ra) Kt、Ke是电动机的结构常数,ω为电动机的角速度(rad/s),所以,在一定的ω时,改变占空比δ,就可以线性地改变电动机的电磁转矩,得到与他励直流电动机电枢电压控制相同的控制特性和机械特性。
三相无刷直流电机系统结构及工作原理
图2.3 直流无刷电动机的原理框图位置传感器在直流无刷电动机中起着测定转子磁极位置的作用,为逻辑开关电路提供正确的换相信息,即将转子磁钢磁极的位置信号转换成电信号,然后去控制定子绕组换相。位置传感器种类较多,且各具特点。在直流无刷电动机中常见的位置传感器有以下几种:电磁式位置传感器、光电式位置传感器、磁敏式位置接近传感器【3】。 2.4基本工作原理 众所周知,一般的永磁式直流电动机的定子由永久磁钢组成,其主要的作用是在电动机气隙中产生磁场。其电枢绕组通电后产生反应磁场。其电枢绕组通电后产生反应磁场。由于电刷的换向作用,使得这两个磁场的方向在直流电动机运行的过程中始终保持相互垂直,从而产生最大转矩而驱动电动机不停地运转。直流无刷电动机为了实现无电刷换相,首先要求把一般直流电动机的电枢绕组放在定子上,把永磁磁钢放在转子上,这与传统直流永磁电动机的结构刚好相反。但仅这样做还是不行的,因为用一般直流电源给定子上各绕组供电,只能产生固定磁场,它不能与运动中转子磁钢所产生的永磁磁场相互作用,以产生单一方向的转矩来驱动转子转动。所以,直流无刷电动机除了由定子和转子组成电动机本体以外,还要由位置传感器、控制电路以及功率逻辑开关共同构成的换相装置,使得直流无刷电动机在运行过程中定子绕组所产生的的磁场和转动中的转子磁钢产生的永磁磁场,在空间始终保持在(π/2)rad左右的电角度。 2.5无刷直流电机参数 本系统采用的无刷电机参数 ·额定功率:100W ·额定电压:24V(DC) ·额定转速:3000r/min ·额定转矩:0.23N?m ·最大转矩:0.46N?m ·定位转矩:0.01N?m ·额定电流:4.0A
无刷直流电机通常情况下转子磁极采用瓦型磁钢,经过磁路设计,可以获得梯形波的气隙磁密,定子绕组多采用集中整距绕组,因此感应反电动势也是梯形波的。无刷直流电机的控制需要位置信息反馈,必须有位置传感器或是采用无位置传感器估计技术,构成自控式的调速系统。控制时各相电流也尽量控制成方波,逆变器输出电压按照有刷直流电机PWM的方法进行控制即可。本质上,无刷直流电机也是一种永磁同步电动机,调速实际也属于变压变频调速范畴。 通常说的交流永磁同步伺服电机具有定子三相分布绕组和永磁转子,在磁路结构和绕组分布上保证感应电动势波形为正弦,外加的定子电压和电流也应为正弦波,一般靠交流变压变频器提供。永磁同步电机控制系统常采用自控式,也需要位置反馈信息,可以采用矢量控制(磁场定向控制)或直接转矩控制的先进控制方式。 两者区别可以认为是方波和正弦波控制导致的设计理念不同。最后明确一个概念,无刷直流电机的所谓“直流变频”实质上是通过逆变器进行的交流变频,从电机理论上讲,无刷直流电机与交流永磁同步伺服电机相似,应该归类为交流永磁同步伺服电机;但习惯上被归类为直流电机,因为从其控制和驱动电源以及控制对象的角度看,称之为“无刷直流电机”也算是合适的。 无刷直流电机通常情况下转子磁极采用瓦型磁钢,经过磁路设计,可以获得梯形波的气隙磁密,定子绕组多采用集中整距绕组,因此感应反电动势也是梯形波的。无刷直流电机的控制需要位置信息反馈,必须有位置传感器或是采用无位置传感器估计技术,构成自控式的调速系统。控制时各相电流也尽量控制成方波, 逆变器输出电压按照有刷直流电机PWM的方法进行控制即可。 本质上,无刷直流电动机也是一种永磁同步电动机,调速实际也属于变压变频调速范畴。通常说的永磁同步电动机具有定子三相分布绕组和永磁转子,在磁路结构和绕组分布上保证感应电动势波形为正弦,外加的定子电压和电流也应为正弦波,一般靠交流变压变频器提供。永磁同步电机控制系统常采用自控式,也需要位置反馈信息,可以采用矢量控制(磁场定向控制)或直接转矩控制的先进控制 策略。 两者区别可以认为是方波和正弦波控制导致的设计理念不同。 最后纠正一个概念,“直流变频”实际上是交流变频,只不过控制对象通常称之为“无刷直流电机”。 仅对电机结构而言,二者确实相差不大,个人认为二者的区别主要在于: 1 概念上的区别。无刷直流电机指的是一个系统,准确地说应该叫“无刷直流电机系统”,它强调的是电机和控制器的一体化设计,是一个整体,相互的依存度非常高,电机和控制器不能独立地存在并独立工作,考核的也是他们整体的技术性能。而交流永磁同步电机指的是一台电机,强调的是电机本身就是一台独立的设备,它可以离开控制器或变频器而独立地存在独立地工作。 2 从设计和性能角度上看,“无刷直流电机系统”设计时主要考虑将普通的机械换向变为电子换向后如何还能保持机械换向电机的优点,考核的重点也是系统的直流电机特性,如调速特性等;而交流永磁同步电机设计主要着重电机本身的性能,特别是交流电机的性能,如电压的波形、电机的功率因数、效率功角特性等。 3 从反电势波形看,无刷直流电机多为方波,而交流永磁同步电机反电势波形多为正弦波。 4 从控制角度看无刷直流电机系统基本不用什么算法,只是依据转子位置考虑给那个绕组通电流即可,而交流永磁同步电机如果需要变频调速则需要一定的算法,需要考虑电枢电流的无功和有功等。
无刷直流电机驱动 James P. Johnson, Caterpiller公司 本章的题目是无刷直流电动机及其驱动。无刷直流电动机(BLDC)的运行仿效了有刷并励直流电动机或是永磁直流电动机的运行。通过将原直流电动机的定子、转子内外对调—变成采用包含电枢绕组的交流定子和产生磁场的转子使得该仿效得以可能。正如本章中要进一步讨论的,输入到BLDC定子绕组中的交流电流必须与转子位置同步更变,以便保持磁场定向,或优化定子电流与转子磁通的相互作用,类似于有刷直流电动机中换向器、电刷对绕组的作用。该原理的实际运用只能在开关电子学新发展的今天方可出现。BLDC电机控制是今天世界上发展最快的运动控制技术。可以预见,随着BLDC的优点愈益被大家所熟知且燃油成本持续增加,BLDC必然会进一步广泛运用。 2011-01-30 23.1 BLDC基本原理 在众文献中无刷直流电动机有许多定义。NEMA标准《运动/定位控制电动机和控制》中对“无刷直流电动机”的定义是:“无刷直流电动机是具有永久磁铁转子并具有转轴位置监测来实施电子换向的旋转自同步电机。不论其驱动电子装置是否与电动机集成在一起还是彼此分离,只要满足这一定义均为所指。”
图23.1 无刷直流电机构形 2011-01-31 若干类型的电机和驱动被归类于无刷直流电机,它们包括: 1 永磁同步电机(PMSMs); 2 梯形反电势(back - EMF)表面安装磁铁无刷直流电机; 3 正弦形表面安装磁铁无刷直流电机; 4 内嵌式磁铁无刷直流电机; 5 电机与驱动装置组合式无刷直流电机; 6 轴向磁通无刷直流电机。 图23.1给出了几种较常见的无刷直流电机的构形图。永磁同步电机反电势是正弦形的,其绕组如同其他交流电机一样通常不是满距,或是接近满距的集中式绕组。许多无刷直流电
超高速永磁直流无刷电机的特点 永磁无刷直流电机由于气隙大,效率高,转子结构简单,适合于超高速运行,是特种电机领域研究的热点,也是超高速精密电主轴理想的驱动部件之一。 永磁无刷直流电机的转子常采用高性能永磁铁,设计成磁环或者扇形块粘贴在转子上,强度低;另外电机高频引起的损耗大,转子散热困难等特有的问题,使得高速永磁无刷直流电机转子温升过大,永磁体易于退磁,制约了电机转速的进一步提高。 在掌握高速永磁无刷直流电机设计理论的基础上,通过电主轴用永磁直流无刷电机的主要问题进行深入的分析,从电机本体结构设计、电磁设计、超高速转子设计等方面对超高速电主轴用电机进行设计,并对开发的超高速永磁直流无刷电机的性能进行了分析。 主要的研究内容包括:首先,阐述了课题的背景及意义,国内外的研究现状,研究内容及结构安排,接着对永磁无刷直流电机的结构组成和工作原理进行了分析。采用传统的磁路计算和电磁场有限元相结合的方法,进行了高速永磁电机的电磁计算。 针对超高速电机的损耗过大等关键问题,结合永磁无刷直流电机的电磁计算方法,给出了一套比较完整的电主轴用内装式超高速永磁无刷直流电机本体设计方案。 其次,研究了力辉电机转子机械强度,转子采用的是整体磁环式结构,为了防止永磁体在高速旋转时产生的巨大拉应力作用下而破
坏,利用非导磁合金钢护套对永磁体进行了保护,保护套与永磁体之间采用过盈配合。基于弹性力学理论和有限元接触理论建立了高速永磁转子应力计算模型,计算了永磁体和护套的接触应力,确定了护套和永磁体之间的过盈量。 根据电主轴实际运行时的温升现象,校核了不同温度下的永磁体和护套的强度,从而保证永磁转子的安全运行。 第三,对高速永磁无刷直流电机内的损耗进行了分析计算,采用有限元法研究了槽开口和气隙长度对转子涡流损耗的影响,在空,负载状态下的研究结果均表明:随着槽开口的增加或者气隙长度的减小,转子损耗都会增加。由于定转子损耗与磁场波形密切相关,对比分析了平行充磁和径向充磁对高速永磁无刷直流电机气隙磁场和电机损耗的影响,结果表明:平行充磁优于径向充磁。 最后,在电机设计的基础上,利用软件搭建了永磁无刷直流电机有限元模型,分析了电磁转矩脉动的抑制方法,并对磁路方案进行了校正,仿真分析了电机性能,完善了电机的结构设计。
无刷直流电机的组成及工作原理 2.1 引言 直流无刷电动机一般由电子换相电路、转子位置检测电路和电动机本体三部分组成,电子换相电路一般由控制部分和驱动部分组成,而对转子位置的检测一般用位置传感器来完成。工作时,控制器根据位置传感器测得的电机转子位置有序的触发驱动电路中的各个功率管,进行有序换流,以驱动直流电动机。下文从无刷直流电动机的三个部分对其发展进行分析。 2.2 无刷直流电机的组成 2.2.1 电动机本体 无刷直流电动机在电磁结构上和有刷直流电动机基本一样,但它的电枢绕组放在定子上,转子采用的重量、简化了结构、提高了性能,使其可*性得以提高。无刷电动机的发展与永磁材料的发展是分不开的,磁性材料的发展过程基本上经历了以下几个发展阶段:铝镍钴,铁氧体磁性材料,钕铁硼(NdFeB)。钕铁硼有高磁能积,它的出现引起了磁性材料的一场革命。第三代钕铁硼永磁材料的应用,进一步减少了电机的用铜量,促使无刷电机向高效率、小型化、节能的方向发展。 目前,为提高电动机的功率密度,出现了横向磁场永磁电机,其定子齿槽与电枢线圈在空间位置上相互垂直,电机中的主磁通沿电机轴向流通,这种结构提高了气隙磁密,能够提供比传统电机大得多的输出转矩。该类型电机正处于研究开发阶段。 2.2.2 电子换相电路 控制电路:无刷直流电动机通过控制驱动电路中的功率开关器件,来控制电机的转速、转向、转矩以及保护电机,包括过流、过压、过热等保护。控制电路最初采用模拟电路,控制比较简单。如果将电路数字化,许多硬件工作可以直接由软件完成,可以减少硬件电路,提高其可靠性,同时可以提高控制电路抗干扰的能力,因而控制电路由模拟电路发展到数字电路。 驱动电路:驱动电路输出电功率,驱动电动机的电枢绕组,并受控于控制电路。驱动电路由大功率开关器件组成。正是由于晶闸管的出现,直流电动机才从有刷实现到无刷的飞跃。但由于晶闸管是只具备控制接通,而无自关断能力的半控性开关器件,其开关频率较低,不能满足无刷直流电动机性能的进一步提高。随着电力电子技术的飞速发展,出现了全控型的功率开关器件,其中有可关断晶体管(GTO)、电力场效应晶体管(MOSFET)、金属栅双极性晶体管IGBT 模块、集成门极换流晶闸管(IGCT)及近年新开发的电子注入增强栅晶体管(IEGT)。随着这些功率器件性能的不断提高,相应的无刷电动机的驱动电路也获得了飞速发展。目前,全控型开关器件正在逐渐取代线路复杂、体积庞大、功能指标低的普通晶闸管,驱动电路已从线性放大状态转换为脉宽调制的开关状态,相应的电路组成也由功率管分立电路转成模块化集成电路,为驱动电路实现智能化、高频化、小型化创造了条件。 2.2.3 转子位置检测电路
无刷直流永磁电动机设计实例 一. 主要技术指标 1. 额定功率:W 30P N = 2. 额定电压:V U N 48=,直流 3. 额定电流:A I N 1< 3. 额定转速:m in /10000r n N = 4. 工作状态:短期运行 5. 设计方式:按方波设计 6. 外形尺寸:m 065.0036.0?φ 二. 主要尺寸的确定 1. 预取效率63.0='η、 2. 计算功率i P ' 直流电动机 W P K P N N m i 48.4063 .030 85.0'=?= = η,按陈世坤书。 长期运行 N i P P ?'' += 'ηη321 短期运行 N i P P ?'' += 'η η431 3. 预取线负荷m A A s /11000'= 4. 预取气隙磁感应强度T B 55.0'=δ 5. 预取计算极弧系数8.0=i α 6. 预取长径比(L/D )λ′=2
7.计算电枢内径 m n B A P D N s i i i 233 11037.110000 255.0110008.048 .401.61.6-?=?????=''''='λαδ 根据计算电枢内径取电枢内径值m D i 21104.1-?= 8. 气隙长度m 3107.0-?=δ 9. 电枢外径m D 211095.2-?= 10. 极对数p=1 11. 计算电枢铁芯长 m D L i 221108.2104.12--?=??='='λ 根据计算电枢铁芯长取电枢铁芯长L= m 2108.2-? 12. 极距 m p D i 22 1 102.22 104.114.32--?=??==πτ 13. 输入永磁体轴向长m L L m 2108.2-?== 三.定子结构 1. 齿数 Z=6 2. 齿距 m z D t i 22 1 10733.06 104.114.3--?=??==π 3. 槽形选择 梯形口扇形槽,见下图。 4. 预估齿宽: m K B tB b Fe t t 2210294.096 .043.155 .010733.0--?=???==δ ,t B 可由 设计者经验得1.43T ,t b 由工艺取m 210295.0-? 5. 预估轭高: m B K B a K lB h j Fe i Fe j j 211110323.056 .196.0255 .08.02.222-?=????=≈Φ= δδτ
ZYT直流永磁电机 概述 ZYT直流永磁电机采用铁氧体永磁磁铁作为激磁,系封闭自冷式。作为小功 率直流马达可以用在各种驱动装置中做驱动元件。 产品说明 (1)产品特点:直流电动机的调速范围宽广,调速特性平滑;直流电动机 过载能力较强,热动和制动转矩较大;由于存在换向器,其制造复杂,价格较高。 (2)使用条件:海拔w 4000m环境温度:-25 C —+40C ;相对湿度w 90%(+25C时);允许温升,不超过75K。 型号说明 90ZYT08/H1 1.90位置表示机座号。用55、70、90、110和130表示。其相应机座号外径为 55mm 70mm 90mm 110mn和130mm 2. ZYT表示直流永磁马达。 3.08位置表示铁芯长度。其中01-49为短铁芯,51-99为长铁芯和101-149为超长铁芯。 4.H1位置为派生结构。其代号用H1、H2 H3??…。 安装形式 1. A1表示单轴伸底脚安装,AA1表示双轴伸底脚安装。 2. A3表示单轴伸法兰安装,AA3表示双轴伸法兰安装。 3. A5表示单轴伸机壳外圆安装,AA5表示双轴伸机壳外圆安装。 使用条件 1. 海拔不超过4000米。 2. 环境温度:-25度到40度。 3. 相对温度:小于等于95度。 4. 在海拔不超过1000米时,不超过75K. 技术参数 以下数值为参考使用,在实际生产时可以根据客户要求调整。 1. 型号55ZYZT01-55ZYZ10转矩55.7-63.7(毫牛米),速度3000-6000(r/min), 功率20-35(W),电压24-110(V),电流1.5-3.2 (A)和允许逆转速度差
直流无刷电机规格书 a c e 集团标准化工作小组 #Q8QGGQT-GX8G08Q8-GNQGJ8-MHHGN#
BLDCM 相关技术要求 沛城内部使用 2012年3月7日起草 接口类参数 一针座间距设计 1. 2.5 mm间距(适用于电机最大工作电流为2A的设计) 2. 3.96mm 间距(适用于电机最大工作电流大于2A但是小于5A的设计) 3. 5.08mm 间距(适用于电机最大工作电流大于5A但是小于12A的设计) 4. 7.62mm 间距(适用于D=225mm以上的离心风机用电机) 二针座定义 电气类参数 一额定工作电压 ◆ 12V DC ◆ 24V DC ◆ 48V DC ◆ 110V AC ◆ 220V AC 二工作电压范围 ◆ 12V DC(7~15V DC)◆ 24V DC(12~30V DC)◆ 48V DC(28~72V DC)◆ 110V AC ◆ 220V AC ---(宽电压范围90~265V AC) 三启动电压即是工作电压范围中的最低电压值(V)。 四额定电流即是产品在额定工作电压下的工作电流(A)。 五最大启动电流即是最高工作电压时的启动电流(A)。
六最大工作电流即是最高工作电压时的输入电流(A)。 七堵转电流即是在最高工作电压时的堵塞保护时的电流(常规是倍工作电流,可持续10S)(A)。 八电流波形即是在采样电阻处可检测的电流形式。正玄波/方波 九额定转速即是在全速时的转速,要求规定参考值和允许偏差值(RPM)。 十最高转速即是在最高工作电压时所能达到的最高转速(RPM)。 十一额定功率即是在自由空间,额定工作电压下的功率(W)。 十二最大功率即是在最高工作电压、最大静压下的最大功率(W)。 基本性能指标 一最大风量是指单位时间内的空气流通量(下图是风量换算公式) 二噪声规定额定噪声和最大噪声(行业要求≤50dB) 控制信号和调速方式 一控制方式(PWM) 二信号电平范围视控制信号输出MCU的I/O VDD值而定。三输入控制信号频率范围 30HZ~30KHZ 四额定电压下,启动所需最小占空比 10% 五占空比≤10%对应状态电机停转(Stop) 六 PWM控制端子悬空(NC)对应状态全速 七占空比=100%对应状态全速 九占空比10%~100%对应转速 RPM Min~RPM Max,近似正比线性 十转速精度 1500RPM及以下转速,要求±150转;1500RPM以上转速,要求±5%可靠性要求
无刷直流永磁电动机设计实例 . 主要技术指标 1. 额定功率: P N 30W 2. 额定电压: U N 48V ,直流 3. 额定电流: I N 1A 3. 额定转速: n N 10000r /min 4. 工作状态:短期运行 5. 设计方式:按方波设计 6. 外形尺寸: 0.036 0.065m . 主要尺寸的确定 1. 预取效率 0.63 、 2. 计算功率 P i 直流电动机 Pi ' K m P N 0.85 30 40.48W ,按陈世坤书 i N 0.63 12 长期运行 P i 132 P N 13 短期运行 P i 1 3 P N 4 3. 预取线负荷 A s ' 11000 A / m 4. 预取气隙磁感应强度 B ' 0.55T 5. 预取计算极弧系数 i 0.8 6. 预取长径比( L/D )λ′=2
7.计算电枢内径 根据计算电枢内径取电枢内径值 D i1 1.4 10 2 m 8. 气隙长度 0.7 10 3 4 m 9. 电枢外径 D 1 2.95 10 2 m 10. 极对数 p=1 11. 计算电枢铁芯长 L D i1 2 1.4 10 2 2.8 10 2 m 根据计算电枢铁芯长取电枢铁芯长 L= 2.8 10 2 m 13. 输入永磁体轴向长 L m L 2.8 10 2 m 定子结构 1. 齿数 Z=6 设计者经验得 1.43T , b t 由工艺取 0.295 10 2 m 3 槽形选择 梯形口扇形槽,见下图 D i1 3 i A 6s . B 1P i n N 6.1 40.48 0.8 11000 0.55 2 10000 1.37 10 2 m 4. 预估齿宽 : b t tB B t K Fe 0.733 10 2 0.55 1.43 0.96 0.294 10 2m , B t 可由 12. 极距 D i1 2p 3.14 1.4 10 2 2 2.2 10 2 m 2. 齿距 i1 3.14 1.4 10 2 0.733 10 2m 5. 预 估 轭 高 : h j1 a i B 2lB j1K Fe 2K Fe B j1 2.2 0.8 0.55 0.323 10 2m
1引言无刷直流电机最本质的特征是没有机械换向器和电刷所构成的机械接触式换向机构。现在,无刷直流电机定义有俩种:一种是方波/梯形波直流电机才可以被称为无刷直流电机,而正弦波直流电机则被认为是永磁同步电机。另一种是方波/梯形波直流电机和正弦波直流电机都是无刷直流电机。国际电器制造业协会在1987年将无刷直流电机定义为“一种转子为永磁体,带转子位置信号,通过电子换相控制的自同步旋转电机”,其换相电路可以是独立的或集成于电机本体上的。本次设计采用第一种定义,把具有方波/梯形波无刷直流电机称为无刷直流电机。从20世纪90年代开始,由于人们生活水平的不断提高和现代化生产、办公自动化的发展,家用电器、工业机器人等设备都向着高效率化、小型化及高智能化发展,电机作为设备的重要组成部分,必须具有精度高、速度快、效率高等优点,因此无刷直流电机的应用也发展迅速[1]。 1.1 无刷直流电机的发展概况 无刷直流电动机是由有刷直流电动机的基础上发展过来的。 19世纪40年代,第一台直流电动机研制成功,经过70多年不断的发展,直流电机进入成熟阶段,并且运用广泛。 1955年,美国的D.Harrison申请了用晶体管换相线路代替有刷直流电动机的机械电刷的专利,形成了现代无刷直流电动机的雏形。 在20世纪60年代初,霍尔元件等位置传感器和电子换向线路的发现,标志着真正的无刷直流电机的出现。 20世纪70年代初,德国人Blaschke提出矢量控制理论,无刷直流电机的性能控制水平得到进一步的提高,极大地推动了电机在高性能领域的应用。 1987年,在北京举办的德国金属加工设备展览会上,西门子和博世两公司展出了永磁自同步伺服系统和驱动器,引起了我国有关学者的注意,自此我国开始了研制和开发电机控制系统和驱动的热潮。目前,我国无刷直流电机的系列产品越来越多,形成了生产规模。 无刷直流电动机的发展主要取决于电子电力技术的发展,无刷直流电机发展的初期,由于大功率开关器件的发展处于初级阶段,性能差,价格贵,而且受永磁材料和驱动控制技术的约束,这让无刷直流电动机问世以后的很长一段时间内,都停
.注意事项 9.1控制方式,当接通220VAC(50Hz)电源,如果没有H/M/L 档位信号输入, 则电机处于待机状态;当H/M/L 任何一档有信号输入时,驱动器根据板子拨码开关状态控制电机按照给定的转速运行。 9.2驱动器具备过热保护功能,当驱动器超温时,首先让电机降频运行,如果 降频后仍然超温,则切断电机电流,直到驱动器温度降至安全范围内,电机才能重新启动。 9.3驱动器具有过电流保护和堵转保护功能。 9.4电机轴承为精密部件,请勿在转轴上冲击,以防产生噪声,影响使用寿命。 9.5使用环境应避免腐蚀性和其它有害气体对电机的损害。 9.6电机转动时请勿接触电机转轴或旋转部件,以免发生危险。 电机接线图: H M L ACL ACN 电源板 温控器 VA 注:电机选用1台或2台根据客户需求使用。 L N PE 火零 接地AC220V Vm (P) GND (N) Vcc (15V) Vsp (PWM) FG 直流电机 DC MOTOR Vm (P) GND (N) Vcc (15V) Vsp (PWM) FG 直流电机 DC MOTOR ACL ACN H M L .运转测试 高中低速测试 如图所示将电源的L 与调速的H,M,L 中的任何一个 端子短接即可按照短接的速度指令运行。
.拨码表:拨码状态表,拨码开关共8位,7、8两位为温控器类型选择(厂家内部设置,00 为三档温控),1~6位为状态选择。 温控器类型00 (三档温控) 序号拨码状态高速H 中速M 低速L 1 000000 611 461 306 2 000010 639 484 322 3 000100 667 506 340 4 000110 694 528 356 5 001000 722 551 372 6 001010 750 573 388 7 001100 777 595 405 8 001110 803 617 421 9 010000 831 639 438 10 010010 858 661 454 11 010100 884 682 470 12 010110 911 704 487 13 011000 937 725 502 14 011010 962 747 518 15 011100 988 767 534 16 011110 1014 789 550 17 100000 1039 809 566 18 100010 1065 830 581 19 100100 1090 852 597 20 100110 1115 872 612 21 101000 1140 892 628 22 101010 1164 912 643 23 101100 1189 933 659 24 101110 1213 953 674 25 110000 1237 973 689 26 110010 1261 993 705 27 110100 1285 1013 720 28 110110 1309 1032 735 29 111000 1332 1052 750 30 111010 1357 1071 765 31 111100 1379 1092 780 32 111110 1403 1111 795
直流永磁电机基本知识 一.直流电机的工作原理 1.直流电机的工作原理 这是分析直流电机的物理模型图。 其中,固定部分有磁铁,这里称作主磁极;固定部分还有电刷。转动部分有环形铁心和绕在环形铁心上的绕组。(其中2个小圆圈是为了方便表示该位置上的导体电势或电流的方向而设置的) 上图表示一台最简单的两极直流电机模型,它的固定部分(定子)上,装设了一对直流励磁的静止的主磁极N和S,在旋转部分(转子)上装设电枢铁心。定子与转子之间有一气隙。在电枢铁心上放置了由A和X两根导体连成的电枢线圈,线圈的首端和末端分别连到两个圆弧形的铜片上,此铜片称为换向片。换向片之间互相绝缘,由换向片构成的整体称为换向器。换向器固定在转轴上,换向片与转轴之间亦互相绝缘。在换向片上放置着一对固定不动的电刷B1和B2,当电枢旋转时,电枢线圈通过换向片和电刷与外电路接通。
直流电机的原理图 对上上图所示的直流电机,如果去掉原动机,并给两个电刷加上直流电源,如上图(a)所示,则有直流电流从电刷A 流入,经过线圈,从电刷B 流出,根据电磁力定律,载流导体和收到电磁力的作用,其方向可由左手定则判定,两段导体受到的力形成了一个转矩,使得转子逆时针转动。如果转子转到如上图(b)所示的位置,电刷A 和换向片2接触,电刷B 和换向片1接触,直流电流从电刷A 流入,在线圈中的流动方向是,从电刷B 流出。 此时载流导体和受到电磁力的作用方向同样可由左手定则判定,它们产生的转矩仍然使得转子逆时针转动。这就是直流电机的工作原理。外加的电源是直流的,但由于电刷和换向片的作用,在线圈中流过的电流是交流的,其产生的转矩的方向却是不变的。 实用中的直流电机转子上的绕组也不是由一个线圈构成,同样是由多个线圈连接而成,以减少电动机电磁转矩的波动,绕组形式同发电机。 将直流电机的工作原理归结如下
永磁直流電機設計 1.電機主要尺寸與功率,轉速的關系: 與異步電機相似,直流電機的功率,轉速之間的關系是: D22*Lg=6.1*108*p’/(αP*A*Bg*Ky*n) (1) D2 電樞直徑(cm) 電机初設計時的主要尺寸 Lg 電樞計算長度(cm) 根據電机功率和實際需要確定 p’計算功率(w) p’=E*Ia=(1+2η)*P N/3η E=Ce*Φ*n*Ky=(P*N/60*a)*Φ2*n*Ky*10-8 Ce 電勢系數 a 支路數在小功率電機中取a=2 p 极數在小功率電機中取p=2 N 電樞總導体數 n 電机額定轉速 Ky 電樞繞組短矩系數小功率永磁電机p=2時,采用單疊繞組Ky=Sin[(y1/τ)*π/2] y1繞組第一節矩 αP 極弧系數一般取αP=0.6~0.75 正弦分布時αP=0.637 Φ每極磁通Φ=αP*τ*Lg*Bg τ極矩(cm) τ=π*D2/P Bg 氣隙磁密(Gs) 又稱磁負荷對鋁鎳Bg=(0.5~0.7) Br 對鐵氧体Bg=(0.7~0.85) Br, Br為剩磁密度 A 電樞線負荷 A=Ia*N/(a*π*D2)Ia電樞額定電流對連續運行的永磁電動机,一般取A=(30~80)A/cm另外電機負荷Δ= Ia/(a*Sd),其中Sd=π*d2/4 d為導線直徑.為了保証發熱因子A*Δ≦1400 (A/cm*A/mm2 )通常以電樞直徑D2和電樞外徑La作為電机主要尺寸,而把電動機的輸出功率和轉睦為電机的主要性能,在主要尺寸和主要性能的基礎上,我們就可以設計電機了. 在(1)式的基礎上經過變換可為:
D22*Lg*n/P’=(6.1*108/π2)*1/(αP*Bg*A)=C A 由上式可以看, C A的值並不取決於電機的容量和轉速,也不直接與電樞直徑和長度有關,它 僅取決於氣隙的平均磁密及電樞線負荷,而Bg和A的變化很小,它近似為常數,通常稱為電機 常數,它的導數K A=1/C A=(p’/n)/(D22* Lg)∞αP*Bg*A 稱為電機利用系數,它是正比於單位電 樞有效体積產生的電磁轉矩的一個比例常數. 2.直流電機定子的確定 2.1磁鋼內徑 根據電機電樞外徑D2確定磁鋼內徑 Dmi=D2+2g+2Hp 其中g為氣隙長度,小功率直流電機g=0.02-0.06cm ,鐵氧體時g可取得大些,鋁鎳鈷磁 鋼電機可取得較小,因鐵氧體H C較大.氣隙對電機的性能有很大的影響,較小的g可以使電樞 反應引起的氣隙磁場畸變加劇,使電機的換向不良加劇,及電機運行不穩定,主極表面損耗和 噪音加劇,以及電樞撓度加大,較大的氣隙,使電機效率下降,溫升提高. 有時電機磁鋼采用極靴,這樣可以起聚磁作用,提高氣隙磁密,還可稠節極靴 形狀以改善空載氣隙磁場波形,負載時交軸電樞反應磁通經極靴閉,合對永磁磁 極的影響較小.但這樣會使磁鋼結構复雜,制造成本增加,漏磁系數較大,外形尺 寸增加,負載時氣隙磁場的畸變較大.而無極靴時永磁體直接面向氣隙,漏磁系數小,能產生較多的磁通,材料利用率高,氣隙磁場畸變,而且結構簡單,便於生產. 其缺點是容易引起不可逆退磁現象. Hp 極靴高(cm) 無極靴結構時Hp=0 2.2磁鋼外徑 Dm0=Dmi+2Hm (瓦片形結構) Hm 永磁體磁路長度,它的尺寸應從滿足(1)有足夠的氣隙磁密(產生不可逆退磁),(2)在要求的任何情運行狀態下會形成永久性退磁等方面來確定,一般Hm=(5~15)g Hm越大,則氣隙磁密也越大,否則,則氣隙磁密也越小. 2.3磁鋼截面積Sm 對于鐵氧體由于Br小,則Sm取較大值,而對于鋁鎳鈷來說, Br較大,則Sm取小值. 環形鐵氧體磁鋼截面積: Sm=αP*π*(Dmi+Hm)Lg/P (cm)
概述 无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。无刷电机是指无电刷和换向器(或集电环)的电机,又称无换向器电机。 无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。 参数 无刷直流减速电机参数分为标准参数和定制电机参数; 标准小型电机参数如下: 直径尺寸:4mm、6mm、8mm、10mm、12mm、16mm、18mm、20mm、22mm、28mm、32mm、38mm; 齿轮箱材质分为:金属、塑胶材质结构; 输出转速:5-2000rpm; 减速比:5-1500; 功率:3V-24V; 输出扭矩:1gf-cm到50KGf-cm; 定制参数,即可按照项目设备需求定制无刷直流减速电机参数、规格和性能需求。
用途 小型无刷直流减速电机广泛应用在医疗器械,智能家居,机器人,汽车驱动,自动化设备,光学设备,精密仪器,工控设备等领域;按照应用方式分为:持续负载应用、可变负载应用、定位应用;在智能家居、智慧城市、机器人自动化领域均有广泛应用,通常是定制参数,规格模式。 品牌介绍 深圳市兆威机电股份有限公司成立于2001年,是一家研发、生产精密传动系统及汽车精密注塑零组件的制造型企业,为客户提供传动方案设计,零件的生产与组装的定制化服务。
电机与拖动基础 课程设计报告 设计题目: 学号: 指导教师: 信息与电气工程学院 二零一六年七月
直流无刷电机本体设计 1. 设计任务 (1) 额定功率 80N P W = (2) 额定电压310N U V ≤ (3) 电动机运行时额定转速 1000/min N n r = (4) 发电机运行时空载转速max 6000/min n r = (5) 最大允许过载倍数 2.5λ= (6) 耐冲击能力21500/m a m s = (7) 机壳外径42D mm ≤ 设计内容: 1. 根据给定的技术指标,计算电机基本尺寸,包括:定子铁心外径、定子铁心内径、铁心长度等。 2. 磁路计算,包括极对选择、磁钢选型、磁钢厚度、气隙长度等方面计算。 3. 定子绕组计算,包括定子绕组形式、定子槽数、绕组节距等计算。 2. 理论与计算过程 2.1 直流无刷电机的基本组成环节 直流无刷电动机的结构原理如图2-1-1所示。它主要由电机本体、位置传感器和电子开关线路三部分组成。电机本体在结构上与永磁同步电动机相似,但没有笼型绕组和其他起动装置。其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,……)组成。图中的电机本体为三相电机。三相定子绕组分别与电子开关线路中相应的功率开关器件连接,位置传感器的跟踪转子与电动机转轴相连接。 当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各相绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。 因此,所谓直流无刷电机,就其基本结构而言,可以认为是一台由电子开关线路、永磁式同步电机以及位置传感器三者组成的“电动机系统”。其原理框图如图2-1-2所示。
用途 永磁直流电机是用永磁体建立磁场的一种直流电机。永磁直流电机广泛应用于各种便携式的电子设备或器具中,如录音机、VCD机、电唱机、电动按摩器及各种玩具,也广泛应用于汽车、摩托车、电动自行车、蓄电池车、船舶、航空、机械等行业,在一些高精尖产品中也有广泛应用,如录像机、复印机、照相机、手机、精密机床、银行点钞机、捆钞机等。在舞台灯光方面,永磁直流电机,特别是小型永磁直流齿轮电机的用量非常大。计算机行业中的打印机、扫描仪、硬盘驱动器、光盘驱动器、刻录机、冷却风扇等都要用到大量的永磁直流电机。 汽车行业中的各种风扇、刮水器、喷水泵、熄火器、反视镜、打气泵更是用到各种永磁直流电机。宾馆中的自动门、自动门锁、自动窗帘、自动给水系统、柔巾机等都用到永磁直流电机、在武器装备中,永磁直流电机广泛应用于导弹、火炮、人造卫星、宇宙飞船、舰艇、飞机、坦克、火箭、雷达、战车等场合。 在工农业方面,永磁直流电机也广泛用于电气和自动化控制及仪器仪表中。在医用方面,永磁直流电机用处更不小,如医用的各种仪器、手术工具,如开脑手术中的电动锯骨刀,特别是野外手术中的各种仪器基本上都是用的永磁直流电机。在残疾人用品方面,如机械手、残疾车等都用到永磁直流电机。在生活方面,用处更多,连牙刷也用永磁直流电机做成电动牙刷了。永磁直流电机的应用真是举不胜举,可以说是无处不在。 随着时代的发展,永磁直流电机的应用会更多,原先用交流电机的许多场合均被永磁直流电机所替代。特别是出现永磁无刷电机后,永磁直流电机的生产数量在不断地上升。我国每年生产的各种永磁直流电机大达数十亿台以上,生产永磁直流电机的厂家不计其数。
特点 1、可替代直流电机调速、变频器+变频电机调速、异步电机+减速机调速; 2、具有传统直流电机的优点,同时又取消了碳刷、滑环结构; 3、可以低速大功率运行,可以省去减速机直接驱动大的负载; 4、体积小、重量轻、出力大; 5、转矩特性优异,中、低速转矩性能好,启动转矩大,启动电流小; 6、无级调速,调速范围广,过载能力强; 7、软启软停、制动特性好,可省去原有的机械制动或电磁制动装置; 8、效率高,电机本身没有励磁损耗和碳刷损耗,消除了多级减速耗,综合节电率可达20%~60%。 9、可靠性高,稳定性好,适应性强,维修与保养简单; 10、耐颠簸震动,噪音低,震动小,运转平滑,寿命长; 11、不产生火花,特别适合爆炸性场所,有防爆型; 12、根据需要可选梯形波磁场电机和正弦波磁场电机。
BLDCM 相关技术要求 沛城内部 使用 2012年3 月7日起草 接口类参数 一针座间距设计 1. 2.5 mm间距(适用于电机最大工作电流为2A的设计) 2. 3.96mm 间距(适用于电机最大工作电流大于2A但是小于5A的设计) 3. 5.08mm 间距(适用于电机最大工作电流大于5A但是小于12A的设计) 4. 7.62mm 间距(适用于D=225mm以上的离心风机用电机) 二针座定义 电气类参数 一额定工作电压 ◆ 12V DC ◆ 24V DC ◆ 48V DC ◆ 110V AC ◆ 220V AC 二工作电压范围 ◆ 12V DC(7~15V DC)◆ 24V DC(12~30V DC)◆ 48V DC(28~72V DC)◆ 110V AC ◆ 220V AC ---(宽电压范围90~265V AC) 三启动电压即是工作电压范围中的最低电压值(V)。
四额定电流即是产品在额定工作电压下的工作电流(A)。 五最大启动电流即是最高工作电压时的启动电流(A)。 六最大工作电流即是最高工作电压时的输入电流(A)。 七堵转电流即是在最高工作电压时的堵塞保护时的电流(常规是1.5倍工作电流,可持续10S)(A)。 八电流波形即是在采样电阻处可检测的电流形式。正玄波/方波 九额定转速即是在全速时的转速,要求规定参考值和允许偏差值(RPM)。十最高转速即是在最高工作电压时所能达到的最高转速(RPM)。 十一额定功率即是在自由空间,额定工作电压下的功率(W)。 十二最大功率即是在最高工作电压、最大静压下的最大功率(W)。 基本性能指标 一最大风量是指单位时间内的空气流通量(下图是风量换算公式) 二噪声规定额定噪声和最大噪声(行业要求≤50dB) 控制信号和调速方式 一控制方式(PWM) 二信号电平范围视控制信号输出MCU的I/O VDD值而定。 三输入控制信号频率范围 30HZ~30KHZ 四额定电压下,启动所需最小占空比 10% 五占空比≤10%对应状态电机停转(Stop) 六 PWM控制端子悬空(NC)对应状态全速 七占空比=100%对应状态全速