跨河水准测量即运用双转点法实施水准测量。若要测A、B两点高差,但A、B两点间跨了河,导致前、后视的中间无法安置仪器,此时要先在A点安置仪器,精平仪器后,读出a11与b11,换尺子另一面(针对有红面与黑面的尺子)或变动仪器高度再测一次得到a12和b12,满足测站精度要求后,将仪器驾到B点,用同样方法测出a21、b21、a22、b22,则A、B两处所测得高差分别为ha=1/2(a11-b11+a12-b12) hb=1/2(a21-b21+a22-B22) A、B两点高差为h=1/2(ha+hb)
GPS定位技术运用于跨河水准测量的理论与实践 目录 第一节:GPS定位技术运用于跨河水准测量的理论依据 (1) 第二节GPS定位技术运用于跨河水准测量的适用范围 (4) 第三节GPS定位技术运用于跨河水准测量的布点要求 (5) 第四节GPS技术运用于跨河水准测量中GPS观测及数据处理 (6) 第五节GPS定位技术运用于淮扬镇新建铁路项目跨河水准测量 (9) 第一节:GPS定位技术运用于跨河水准测量的理论依据 ⒈GPS大地高,水准测量的正常高,高程异常 GPS测量是以WGS-84椭球面为基准,在WGS-84地心坐标系中进行的,所提供的高程为相对于WGS-84椭球的大地高,遗憾的是相对于WGS-84椭球的GPS大地高是没有物理意义的,只是一个假定的高程系统,而实际工程应用中采用的是以似大地水准面为基准的正常高系统。所以,在实际应用中一般要将GPS大地高转化为目前我国使用的正常高(我国现有的高程资料基本属于黄海56高程系或85高程系)。进行GPS高程转换要考虑WGS-84椭球和本地参考椭球的差异以及大地水准面和似大地水准面相对本地参考椭球的高差,即大地水准面高和高程异常。大地高、正常高和高程异常之间有如下关系: H G=H N+ξ 其中,HG为大地高;HN为正常高;ξ为高程异常,
高程异常,即同一测站点以WGS-84为基准的GPS大地高与以似 大地水准面为基准的正常高之间的高程异常。其几何关系见下图 ⒉高程异常变化值,高程异常变化率 高程异常变化值:当测区中某一个点A既用GPS定位技术测得其 GPS大地高HGA,又用常规高程测量方法测得其正常高HNA,我们 就可以求出A点的高程异常值; ξA=H G A- H NA 同样,当测区中某一个点B既用GPS定位技术测得其GPS大地高 HGB,又用常规高程测量方法测得其正常高HNB,我们就可以求出B 点的高程异常值。 ξB=H G B- H NB 测区中AB两点的高程异常变化值即为 △ξAB=ξA-ξB=( H G A- H NA)-( H G B- H NB)高程异常变化率:当AB两点的水平距离为LAB时,那么AB两点 高程异常变化率即为:
跨河精密水准测量
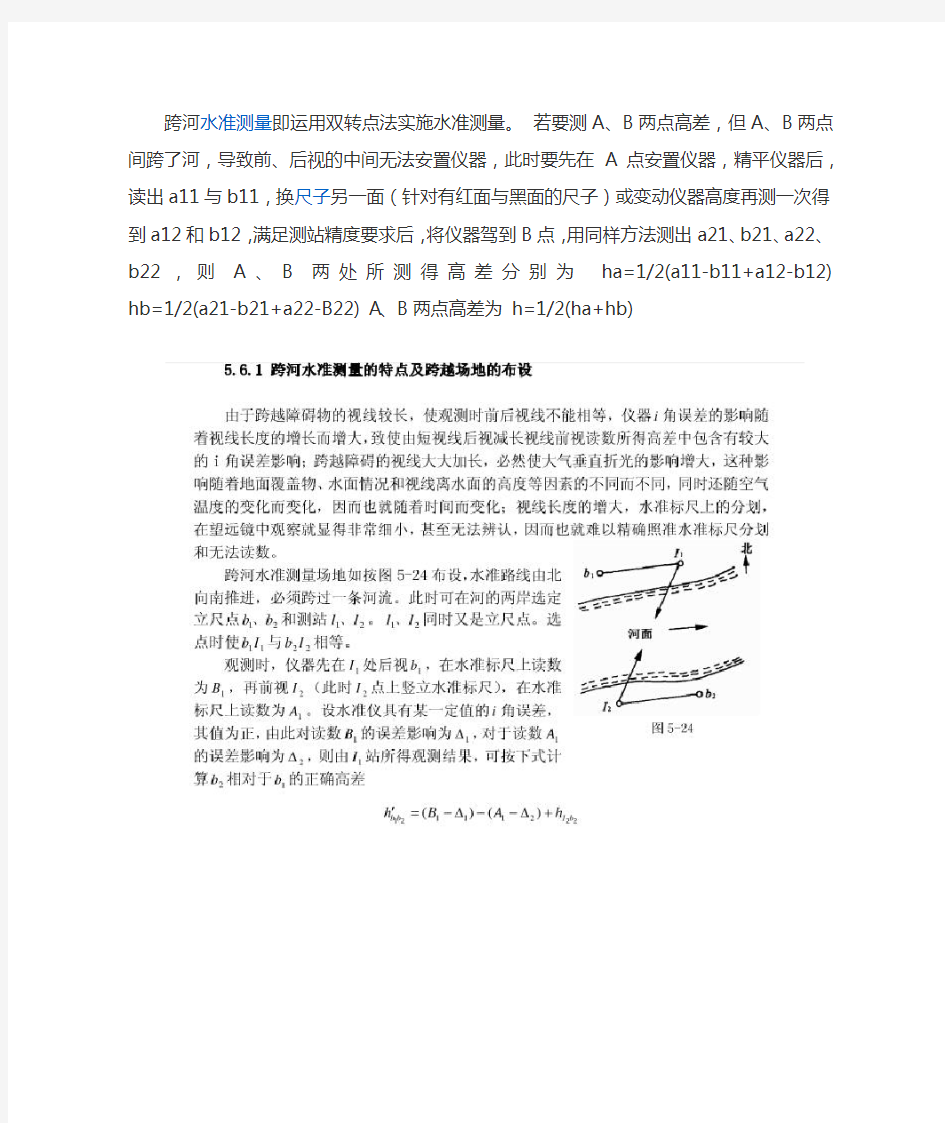
§5.6 跨河精密水准测量 水准规范规定,当一、二等水准路线跨越江河、峡谷、湖泊、洼地等障碍物的视线长度在l00m以内时,可用一般观测方法进行施测,但在测站上应变换一次仪器高度,观测两次的高差之差应不超过1.5mm,取用两次观测的中数。若视线长度超过100m时,则应根据视线长度和仪器设备等情况,选用特殊的方法进行观测。 5.6.1 跨河水准测量的特点及跨越场地的布设 由于跨越障碍物的视线较长,使观测时前后视线不能相等,仪器i角误差的影响随着视线长度的增长而增大,致使由短视线后视减长视线前视读数所得高差中包 含有较大的i角误差影响;跨 3 图5-24
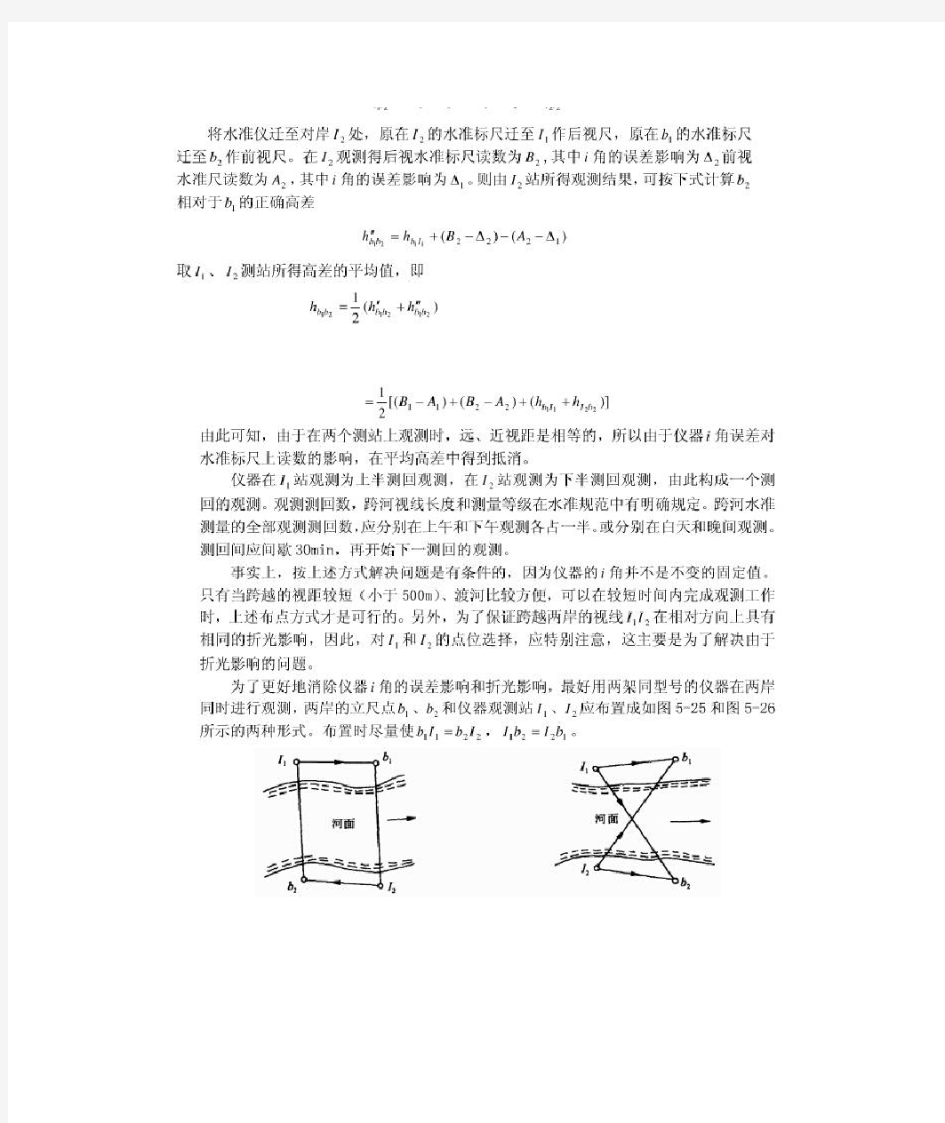
3 越障碍的视线大大加长,必然使大气垂直折光的影响增大,这种影响随着地面覆盖物、水面情况和视线离水面的高度等因素的不同而不同,同时还随空气温度的变化而变化,因而也就随着时间而变化;视线长度的增大,水准标尺上的分划,在望远镜中观察就显得非常细小,甚至无法辨认,因而也就难以精确照准水准标尺分划和无法读数。 跨河水准测量场地如按图5-24布设,水准路线由北向南推进,必须跨过一条河流。此时可在河的两岸选定立尺点21b b 、和测站21I I 、。21I I 、同时又是立尺点。选点时使11I b 与2 2I b 相等。 观测时,仪器先在1I 处后视1 b ,在水准标尺上读数为1B ,再前视2I (此时2 I 点上竖立水准标尺),在水准标尺上读数为1 A 。设水准仪具有某一定值的i 角误差,其值为正,由此对读数1B 的误差影响为1?,对于读数1A 的误差影响为2?, 则由1I 站所得观测结果,可按下式计算2 b 相对于1 b 的正确高差 2221)()(2111b I b b h A B h +?--?-='
角度测量的原理及其方法 角度测量原理 一、水平角测量原理 地面上两条直线之间的夹角在水平面上的投影称为水平角。如图 3-1所示,A、B、O为地面上的任意点,通OA和OB直线各作一垂 直面,并把OA和OB分别投影到水平投影面上,其投影线Oa和Ob 的夹角∠aOb,就是∠AOB的水平角β。 如果在角顶O上安置一个带有水平刻度盘的测角仪器,其度盘 中心O′在通过测站O点的铅垂线上,设OA和OB两条方向线在水 平刻度盘上的投影读数为a1和b1,则水平角β为: β= b1 - a1(3-1) 二、竖直角测量原理 在同一竖直面内视线和水平线之间的夹角称为竖直角或称垂直 角。如图3-2所示,视线在水平线之上称为仰角,符号为正;视线在 水平线之下称为俯角,符号为负。
图3-1 水平角测量原理图图3-2 竖直角测 量原理图 如果在测站点O上安置一个带有竖直刻度盘的测角仪器,其竖盘中心通过水平视线,设照准目标点A时视线的读数为n,水平视线的读数为m,则竖直角α为: α= n - m (3-2) 光学经纬仪 一、DJ6级光学经纬仪的构造 它主要由照准部(包括望远镜、竖直度盘、水准器、读数设备)、水平度盘、基座三部分组成。现将各组成部分分别介绍如下:1.望远镜 望远镜的构造和水准仪望远镜构造基本相同,是用来照准远方目标。它和横轴固连在一起放在支架上,并要求望远镜视准轴垂直于横轴,当横轴水平时,望远镜绕横轴旋转的视准面是一个铅垂面。为了控制望远镜的俯仰程度,在照准部外壳上还设置有一套望远镜制动和
微动螺旋。在照准部外壳上还设置有一套水平制动和微动螺旋,以控制水平方向的转动。当拧紧望远镜或照准部的制动螺旋后,转动微动螺旋,望远镜或照准部才能作微小的转动。 2.水平度盘 水平度盘是用光学玻璃制成圆盘,在盘上按顺时针方向从0°到360°刻有等角度的分划线。相邻两刻划线的格值有1°或30′两种。度盘固定在轴套上,轴套套在轴座上。水平度盘和照准部两者之间的转动关系,由离合器扳手或度盘变换手轮控制。 3.读数设备 我国制造的DJ6型光学经纬仪采用分微尺读数设备,它把度盘和分微尺的影像,通过一系列透镜的放大和棱镜的折射,反映到读数显微镜内进行读数。在读数显微镜内就能看到水平度盘和分微尺影像,如图3-4所示。度盘上两分划线所对的圆心角,称为度盘分划值。 在读数显微镜内所见到的长刻划线和大号数字是度盘分划线及其注记,短刻划线和小号数字是分微尺的分划线及其注记。分微尺的长度等于度盘1°的分划长度,分微尺分成6大格,每大格又分成10,每小格格值为1′,可估读到0.1′。分微尺的0°分划线是其指标线,它所指度盘上的位置与度盘分划线所截的分微尺长度就是分微尺读数值。为了直接读出小数值,使分微尺注数增大方向与度盘注数方向相反。读数时,以在分微尺上的度盘分划线为准读取度数,而后读取该度盘分划线与分微尺指标线之间的分微尺读数的分数,并估读
跨河高程传递精密三角高程测量代替一二等水准测量方法 [摘要]跨河高程传递的测量技术有很多,本文主要简述了精密三角高程的方法来代替一二等水准测量方法的过程,国家一、二等水准测量规范》(CB/r12897-2007)规定了精密三角高程法跨河水准测量的作业方法。此方法应用于长距离三角高程多个项目大桥高程控制网。探讨了一下其中几个比较关键的问题,三角高程测量的误差来源及精度,得出了减弱各项误差从而提高精度的一些相关结论。 [关键词]跨河高程传递精密三角高程二等水准测量 目前高程测量方法一般分为几何水准测量、GPS水准测量和三角高程测量三大类。用传统水准的方法测定点与点之间的高差,所得到的地面点高程精度较高,普遍用于建立国家高程控制点。 跨河三角高程测量以它的测量时间、生产效率优于几何水准测量得以广泛应用,尤其在山区、水域作业,几何水准测量困难,精密三角高程测量发挥了很大优势,解决了几何水准测量难以解决的高程传递问题。随着科技的发展,例如莱卡TC2002、TCA2003测距测角的精度大大提高。通过一定的测量方法又可以减弱或者消除三角高程测量中各种误差源的影响,从而达到高等级水准测量的精度。 1具体跨河精密三角高程作业方法 现行《国家一、二等水准测量规范》规定,精密三角高程法跨河水准测量作业应布设成大地四边形,跨海测量既是通过该方法对近海海岛进行高程传递。 如图l所示。该图形由四条跨河边构成三个独立的闭合环。具有检核条件较多的优点。 ①水准仪测定本岸站点间高差hAB和hCD。②用全站仪测量测站点问距离D-AC、D-AD、D-BC、D-BD。③垂直角观测程序:(a)A、C两点设全站仪,B、D两点设标尺,首先观测本岸近标标定仪器高,测定bB,bD然后同步观测对岸远标尺,测定aAD、aCB;(b)A点仪器不动,C点移到D点,同步观测对岸远标尺,测定aAC、aDB;(c)D点仪器不动,同步观测对岸远标尺,测定aBC、aDA;(d)B点仪器不动,观测本岸近标尺,测定bA,再将D点仪器移回到C 点,同步观测对岸远标尺,测定aBD、aCA,最后,c点仪器观测本岸近标尺。至此,第一仪器位置的观测结束,2台仪器共完成4个单测回的观测量。④观测员、仪器、标尺相互调岸,按上述观测程序完成第二时段仪器位置的观测。 每条边均按单向观测进行高差计算,公式为: 式中:D为跨河点问的水平距离;Iv为垂直角;i为仪器高;v为照准高度.k
当水准路线需要跨越较宽的河流或山谷时,因跨河视线较长,超过了规定的长度,使水准仪i角的误差、大气折光和地球曲率误差均增大,且读尺困难。所以必须采用特殊的观测方法,这就是跨河水准测量方法。 图8-3 进行跨河水准测量,首先是要选择好跨河地点,如选在江河最窄处,视线避开草丛沙滩的上方,仪器站应选在开阔通风处,跨河视线离水面2~3m以上。跨河场地仪器站和立尺点的位置见图8-3。当使用两台水准仪作对向观测时,宜布置成图中的(a)或(b)的形式。图中I1、I2为仪器站,b1、b2为立尺点,要求跨河视线尽量相等,岸上视线I1b1、I2b2不少于10m并相等。当用一台水准仪观测时,宜采用图中(c)的形式,此时图中I1、I2既是仪器站又是立尺点。这种布置除了要观测跨河高差和外,还应观测同岸点高差和,以便求出b1b2的高差。 跨河水准测量,当跨河视线在500m以下时,通常用精密水准仪,以光学测微法进行观测。由于跨河视线较长,须要特制一觇板供照准和读数之用。觇板构造如图8-4。觇板上的照准标志用黑色绘成矩形,其宽度为视线长的1/2.5万,长度为宽度的5倍。觇板中央开一小口,并在中央安装一水平指标线,指标线应平分矩形标志的宽度。 用光学测微法的观测方法如下: 1.观测本岸近标尺。直接照准标尺分划线,用光学测微器读数两次。 2. 图8-4 观测对岸标尺。照准标尺后使气泡精密符合,测微器读旋到50。指挥对岸持尺者将觇板沿标尺上下移动,使觇板指标线置于水平视线附近,并精确对准标尺上的基本分划线,记下标尺读数,每次读数差不大于0.1S(mm),S为视线长(m),如此构成一组观测。然后移动觇板重新对准标尺分划级,按同样顺序进行第二组观测。 以上1、2两步操作,称一测回的上半测回。 3.上半测回完成后,立即将仪器迁至对岸,并互换两岸标尺。然后进行下半测回观测。下半测回应先测远尺再测近尺,观测每一标尺的操作与上半测回相同。 由上、下半测回组成一测回。
跨河水准测量方法及其平差处理方法 1 概述 《国家一、二等水准测量规范》(GB/T12897-2006)规定:当一、二等水准路线跨越江河、峡谷、湖泊、洼地等障碍物的视线长度在 l00m以内时,可用一般观测方法进行施测,但在测站上应变换一次仪器高度,观测两次的高差之差应不超过 1.5mm,取用两次观测的中数。若视线长度超过 100m 时,则应根据视线长度和仪器设备等情况,选用特殊的方法进行观测。 某一等水准网跨河段长度约为 530 米为保证该工程顺利实施,选用合适的跨河水准测量方法是的关键工作之一,本工程实例,采用了三角高程测量方法,精度要求达到国家一等水准准测量精度,仪器采用徕卡 TS30(测角精度0.5“,测距精度 0.6mm+1ppm)。 2 观测网形及场地选择 2.1 观测网形布设 为提高跨河水准精度,减小气温、气压、大气折光的影响,测点C1、C2、D1、D2 近似在同一水平面上,且保证四个测点成一近似矩形。跨河水准示意图如图 1. 2.2 布设场地遵循原则 2.2.1 观测墩建在测线处于河段较狭窄处,保证其同意水平面上。跨河视线不得通过草丛,干丘、沙滩的上方,且保证避免正对日照方向。 2.2.3 两岸由仪器至水边的一段河岸,其距离应近于相等,其地貌、土质、植被等也应相似,仪器位置应选在开阔、通风之处,不得靠近墙壁及土、石、砖堆等。 3 施测方法 在 D1 架 TS30,分别照准 C1、C2、D2,得到一测回观测高差:(S为斜距,δ为竖角),两点之间的高差为S×sinδ+i-(li 为仪器高,l 为目标高),C1 点的高程为Hc1=HD1+S×sinδ+i-l,C2、D2 的高程同理可得。利用以上三点的高程求 C1 D2、C2 D2 之间的高差。HD1,i 均一样,相互抵消,若目标高相等则高差等于S×sinδ的差值。为了使目标高也相互抵消,可以先全部采用使用同一型号的棱镜及觇标,这样目标高可看成一致,但世上没有完全相同的两个物体,为消除不同的目标高对观测高差的影响,把棱镜及觇标分成 A、B 两组,A 组总与仪器在一起,B 组总是在仪器的对岸,这样往返测求平均高差则影响抵消。
城市轨道交通工程~地面高程控制测量一、二等水准测量规范4.1 一般规定 4.1.1 城市轨道交通工程高程测量应采用统一的高程系统,并应与现有城市高程系统相一致。 4.1.2 城市轨道交通工程高程控制网为水准网,应分两个等级布设:一等水准网是与城市二等水准网精度一致的水准网,二等水准网是加密的水准网。现有城市一、二等水准点间距小于4km时,应一次布设城市轨道交通工程二等水准网。 4.1.3 水准网应沿线路附近线路布设成附合线路、闭合线路或节点网。二等水准点间距平均800m,联测城市一、二等水准点的总数不应少于3个,宜均匀分布。 4.1.4 水准网测量的主要技术要求应符合表4.1.4的规定。 表4.1.4 水准网测量的主要技术要求 2 采用数字水准仪测量的技术要求与同等级的光学水准仪测量技术要求相同。 4.1.5 水准点应选在施工影响的变形区域以外稳固、便于寻找、保存和引测的地方,宜每隔3km埋设1个深桩或基岩水准点。车站、竖井及车辆段附近水准点布设数量不应少于2个。 4.1.6 当水准路线跨越江、河、湖、塘且视线长度小于100m时,可采用一般水准测量方法进行观测;视线长度大于100m时,应进行跨河水准测量。跨河水准测量可采用光学测微法、倾斜螺旋法、经纬仪倾角法和光电测距三角高程法等,其技术要求应符合现行国家标准《国家一、二等水准测量规范》GB12897的相关规定。
4.1.7 水准点标石和标志应按本规范附录B中的图B.0.1、图B.0.2、图B.0.3和图B.0.4的形式和规格埋设适宜的水准标石。水准点也可以利用精密导线点标石,墙上水准点应选在稳固的永久性建筑上。 4.1.8 水准点标石埋设结束后,应绘制点之记,并办理水准点委托保管书。 4.1.9 对已建成的水准网应定期进行复测,第一次复测应在开工前进行,之后应一年复测一次,且应根据点位稳定情况适当调整复测频次。复测精度不应低于原测精度,高程较差不应大于√2倍高程中误差。当水准点标石被破坏时,应重新埋设,复测时统一观测。 4.2 水准网测量 4.2.1 作业前,应对所使用的水准测量仪器和标尺进行常规检查与校正。水准仪i角检查与校正。水准仪i角检查,在作业第一周内应每天一次,稳定后可半月一次。一等水准测量仪器i角应小于或等于20“。 4.2.2 一等及二等水准网测量的观测方法应符合下列规定: 1 往测奇数站上:后—前—前—后 偶数站上:前—后—后—前 2反测奇数站上:前—后—后—前 偶数站上:后—前—前—后 3 使用数字水准仪,应将有关参数、限差预先输入并选择自动观测模式,水准路线应避开强电磁场的干扰。 4 一等水准每一测段的往测和返测,宜分别在上午、下午进行,也可以夜间观测。 5 由往测转向返测时,两根水准尺必须互换位置,并应重新整置仪器。 4..2. 3 水准测量观测的视线长度、视距差、视线高度应符合表4.2.3的规定。 表4.2.3 水准测量观测的视线长度、视距差、视线高度的要求(m)
毕业设计 [论文] 题目:跨河水准测量方法与精度分析 学院:测绘工程学院 专业:测绘工程 姓名:黄玉鹏 学号:061411122 指导老师:朱淑丽 完成时间:2015.05.24
摘要 工程建设时水准线路布设过程中难免会遇到江河、宽沟、湖泊、山谷等障碍物,有时候根据测量任务的需要,必须通过这些障碍物进行精密水准测量。这个时候,通常的水准测量方法无法实现,因此需要采用特殊的方法和设备在保证一定测量精度和施测可行性的前提下,来完成障碍物的跨越测量。跨河水准测量的基本方法包括直接法几何水准测量、光学测微法水准测量、倾斜螺旋法水准测量、经纬仪倾角法水准测量、测距三角高程法水准测量、GNSS水准测量等方法。本文对这些方法分别进行了论述和精度分析。文章最后采用重庆朝天门观测数据,以表格的形式对整个测距三角高程法的计算过程进行了分析。 关键词:经纬仪倾角法,倾斜螺旋法,光学测微法,测距三角高程法,GNSS高程测量,精度分析
ABSTRACT When construction standard line layout process will inevitably encounter rivers, wide ditch, lakes, valleys and other obstacles, sometimes necessary measurement tasks must be precise leveling through these obstacles. This time, the usual method of leveling is not possible, and therefore require special methods and equipment at guaranteed measurement accuracy and test the feasibility of applying the prerequisite to complete the obstacle across measurements. River - crossing Leveling basic methods including direct geometric leveling method, optical micrometer method leveling, tilt leveling screw method, dip method theodolite leveling, EDM trigonometric leveling method leveling, GNSS leveling and other methods. In this paper, these methods were discussed and precision analysis. Finally, using the Chao tian men observation data in tabular form for the calculation of the entire EDM trigonometric leveling method were analyzed. Key words: Theodolite dip method, tilt spiral, optical micrometer law, EDM trigonometric leveling method, GNSS height measurement, precision analysis
桥梁工程跨河水准测量的计算 1跨河水准测量的高差计算 在CZ1测站点上架设并调平好测量仪器,观测T1、T2两点水准尺的读 数为a1、b1;在CZ2测站点上架设并调平好测量仪器,观测T1、T2两点水准尺的读数为a2、b2。因为所架设的测量仪器CZ1和CZ2到近尺 和远尺的距离是大致相等的,这样就能够消除测量仪器本身的视准轴 和水准管轴不平行后产生的误差,所以地球曲率和大气折射的误差在 近尺和远尺上的读数影响也大致相同,分别为c1和c2,则T1、T2两 点间的高差计算。 通常情况下我们会使用两台同等精度的水准仪,在河道两侧同时相向 观测。如果两操纵点的跨越长度不超过300m,测量精度达到三、四等 水准测量精度时,两台水准仪在河道两侧同时各观测一个测回。如果 使用一台水准仪观测,其每一测回的观测顺序如下。(1)水准仪架设 在CZ1测站点上,调平后直接瞄准T1点尺,用中丝在黑、红面读数各 一次,黑面、红面读数差要求应小于3mm。(2)瞄准对面的T2点,用中丝在黑面、红面读数各一次,如果读数较差小于3mm,就能够计算T1、T2两点间的高差。规范规定黑面、红面所测高差较差应小于5mm,如 果满足以上规范要求,就能够取平均值作为T1、T2两点之间的高差。 以上测量过程就已经完成了上半个测回。(3)将水准仪移至河道对岸 的CZ2测站点上,与第一次架设水准仪的高度最好在30cm以上,瞄准 T1点,用水准仪的中丝观测出黑面、红面的读数,然后再瞄准T2点用同样的方法观测出黑面、红面的读数。如果满足规范的各项要求,就 能够计算出T1、T2两点间的误差。以上完成了一测回的工作。如果在 这两次所测的T1、T2两点间的高差之差小于5mm,取其两次高差平均 数作为最后成果。在水准测量完成后要严格按照表2水准测量的主要 技术要求来平差,所用仪器及其配套附件一定要经过有计量资质的单 位检定合格方可使用。
水准测量的方法及其实施 水准测量原理 水准测量的基本测法是:在图2-1中,已知A点的高程为H A,只要能测出A点至B点的高程之差,简称高差h AB。,则B点的高程 H B就可用下式计算求得: H B=H A+h AB (2-1) 差h AB。的原理如图2-1所示, 在A、B两点上竖立水准尺, 并在A、B两点之间安置— 图2-1 水准测量原理示意图架可以得到水平视线的仪器 即水准仪,设水准仪的水平视线截在尺上的位置分别为M、N,过A 点作一水平线与过B点的竖线相交于C。因为BC的高度就是A、B 两点之间的高差h AB。,所以由矩形MACH就可以得到计算h AB的式: h AB = a - b (2-2) 测量时,a、b的值是用水准仪瞄准水准尺时直接读取的读数值。 因为A点为已知高程的点,通常称为后视点,其读数a为后视读数,
而B点称为前视点,其读数b为前视读数。即 h AB = 后视读数-前视读数 视线高H i=H A+a (2-3)B点高程H B=H i-b (2-4)综上所述要测算地面上两点间的高差或点的高程,所依据的就是一条水平视线,如果视线不水平,上述公式不成立,测算将发生错误。因此,视线必须水平,是水准测量中要牢牢记住的操作要领。 水准仪和水准尺 一、微倾式水准仪的构造 如图2-2所示,微倾式水准仪主要由望远镜、水准器和基座组成。水准仪的望远镜能绕仪器竖轴在水平方向转动,为了能精确地提供水平视线,在仪器构造上安置了一个能使望远镜上下作微小运动的微倾螺旋,所以称微倾式水准仪。 1.望远镜 望远镜由物镜、目镜和十字丝三个主要部分组成,它的主要作用是能使我们看清远处的目标,并提供一条照准读数值用的视线。 十字丝是在玻璃片上刻线后,装在十字丝环上,用三个或四个可
水准仪测量高程的方法和步骤 2010-11-28 01:58:11| 分类:工程测量|举报|字号订阅 [教程]第二章水准测量 未知2009-12-13 16:21:06 网络 内容:理解水准测量的基本原理;掌握 DS3 型微倾式水准仪、自动安平水准仪的构造特点、水准尺和尺垫;掌握水准仪的使用及检校方法;掌握水准测量的外业实施(观测、记录和检核)及内业数据处理(高差闭合差的调整)方法;了解水准测量的注意事项、精密水准仪和电子水准仪的构造及操作方法。 重点:水准测量原理;水准测量的外业实施及内业数据处理。 难点:水准仪的检验与校正。 §2.1 高程测量( Height Measurement )的概念 测量地面上各点高程的工作 , 称为高程测量。高程测量根据所使用的仪器和施测方法的不同,分为: (1)水准测量 (leveling) (2)三角高程测量 (trigonometric leveling) (3)气压高程测量 (air pressure leveling) (4)GPS 测量 (GPS leveling) §2.2 水准测量原理 一、基本原理 水准测量的原理是利用水准仪提供的“水平视线”,测量两点间高差,从而由已知点高程推算出未知点高程。
a ——后视读数 A ——后视点 b ——前视读数 B ——前视点 1、A 、 B 两点间高差: 2、测得两点间高差后,若已知 A 点高程,则可得B点的高程: 。 3、视线高程: 4、转点 TP(turning point) 的概念:当地面上两点的距离较远,或两点的高差太大,放置一次仪器不能测定其高差时,就需增设若干个临时传递高程的立尺点,称为转点。 二、连续水准测量
桥梁是公路最重要的组成部分之一,在桥位的控制测量中,一般精度要求较高,特别是特大桥的桥位控制网更是如此。建立特大桥的桥位控制网的传统方法,一般是采用测角网,随着电磁波测距仪的广泛应用,又出现了测边网。测角网有利于控制方向误差,而测边网有利于控制长度误差。为了充分发挥二者的优点,现在一般布设同时测角和测边的边角网。 桥梁施工控制网是全桥施工测量的基准。控制网布置是否合理和能否达到预定精度要求,直接影响到工程的施工质量。测量施工控制网分为平面控制网和高程控制网两种。建立施工平面控制网的目的是为了满足施工中平面放样的需要,并保证所放样的平面点坐标满足施工的精度要求。 一、特大桥控制网布设要求 特大桥的桥位控制网的布设除满足三角测量本身的需要外,还要求控制点应选在不被水淹,不受施工干扰便于放线的地方,并且其中两点应设在桥轴线上,桥轴线上的控制点间应实测距离,基线应尽量与桥轴线垂直。基线长度一般不小于桥轴线长度的0.7倍,困难地段不小于0.5倍。 桥位控制边角网应根据地形情况以及桥梁长度进行布设,若桥位有一岸有障碍物或其它因素不宜测定基线的地形,可布设为双三角形;若两岸均有一侧不宜测定基线的地形,可布设为四边形;若两岸是两侧均可测定基线的地形且长度>2000m时可布设双四边形。 由测量平差原理可知,如果三角形的所有边和角都测了,无论采用条件平差还是采用间接平差,都会大量增加法方程式的解算工作。因此布设边角网时,还需考虑计算的难易、繁简,一般情况下,不一定观测所有的边长,尽可能采用较简捷的方法进行布网和观测,只要有足够的多余观测可作为检核即可。 二、特大桥梁施工控制网的观测方案 桥梁施工平面控制网观测方案主要有测角网、测边网和边角网几种。 (一)测角网是用经纬仪观测控制网的所有内角,并在每岸各丈量一条基线 其它边长根据基线及内角推算。测角网的精度主要由测角的中误差控制,这种网的外业工作量较大,一般在测距工具受到限制时考虑采用。 (二)测边网是用测距仪观测控制网的所有边长,但不观测内角 测边网的精度完全决定于测距的精度。由于当前测距仪(包括全站仪)已能达到相当高的测距精度,而且用测距仪测距劳动强度低,工效高。因此测边网的外业工作量小,控制网也能达到较高的精度。但由于测边网的多余观测量小,相对其他两种观测方案而言其可靠性较差。 (三)边角网是既用测距仪观测控制网的边长,又用经纬仪观测控制网的内角 若所有的边长和所有的内角均全部观测,这种边角网称为完全边角网,其精度最高,但外业工作量很大。其实,在观测所有边长的基础上根据优化设计原理有选择地观测少量的几个内角,既可使控制网的精度接近完全边角网的精度,又可使外业工作量较少。 桥位控制边角网的网形主要有双三角形、四边形、双四边形。
GPSt位技术运用于跨河水准测量的理论与实践 目录 第一节: GPS 定位技术运用于跨河水准测量的理论依据 (1) 第二节 GPS 定位技术运用于跨河水准测量的适用范围 (5) 第三节 GPS 定位技术运用于跨河水准测量的布点要求 (5) 第四节 GPS 技术运用于跨河水准测量中 GPS 观测及数据处理 (7) 第五节 GPS 定位技术运用于淮扬镇新建铁路项目跨河水准测量 (9) 第一节:GPS定位技术运用于跨河水准测量的理论依据 1 GPS大地高,水准测量的正常高,高程异常 GPS测量是以WGS-84椭球面为基准,在WGS-84地心坐标系中进行的,所提供的高程为相对于WGS-84椭球的大地高,遗憾的是相对于WGS-84椭球的GPS大地高是没有物理意义的,只是一个假定的高程系统,而实际工程应用中采用的是以似大地水准面为基准的正常高系统。所以,在实际应用中一般要将GPS大地高转化为目前我国使用的正常高(我国现有的高程资料基本属于黄海56 高程系或85高程系)进行GPS高程转换要考虑WGS-84椭球和本地参考椭球的差异以及大地水准面和似大地水准面相对本地参考椭球的高差,即大地水准面高和高程异常。大地高、正常高和高程异常之间有如下关系: H G=H N+ E 其中,HG为大地高;HN为正常高;为高程异常, 高程异常,即同一测站点以WGS-84为基准的GPS大地高与以似
大地水准面为基准的正常高之间的高程异常。其几何关系见下图
2高程异常变化值,高程异常变化率 高程异常变化值:当测区中某一个点A既用GPS定位技术测得其 GPS大地咼HGA,又用常规咼程测量方法测得其正常咼HNA,我们就可以求出A 点的高程异常值; 直二H GA- H NA 同样,当测区中某一个点B既用GPS定位技术测得其GPS大地高HGB,又用常规高程测量方法测得其正常高HNB,我们就可以求 出B 点的高程异常值 B=H GB- H NB 测区中AB 两点的高程异常变化值即为 △AB =直-fe=( H GA-H NA)-( H GB- H NB)高程异常变化率:当AB两点的水平距离为LAB时,那么AB两点高程异常变化率即为: 三AB / L AB V E AB =△ 3.跨河水准测量理论依据 高程异常变化值,以及高程异常变化率在工程实践中应用非常广泛,其内涵及外延各种论述专著各有不同,本文上述两个概念是专为论述跨河水准测量而设,仅以此文为限。 高程异常产生的物理原因如下: 第一:地球是一个类椭球,而非严格意义上的椭球。在某些区域地球形状与几何椭球相去甚远。
浅谈跨江(河)大桥的测量控制 【摘要】:本文通过南宁铁路枢纽新南宁邕江四线特大桥跨邕江桥墩的测量控制,重点对跨河测量的平面、高程以及变形观测控制进行阐述,以达到提高测量精度的目的。【关键词】:跨江(河) GPS平面三角高程测量 一、引言 新南宁邕江四线特大桥梁全长为1723.68m,依次跨越江北大道、邕江、江南大道、五一路。邕江在本桥位处属内河Ⅱ级航道,桥位跨越邕江处江面宽约370m,江面至轨面约33.5m。连续梁主墩采用圆端型实体墩,边墩及其余桥跨桥墩均采用矩形墩,钻孔桩承台基础。本桥主跨(72+2〓128+72)m连续梁20#~22#号桥墩基础位于邕江水中,现施工常水位水深约5.3~13.8m,且河床覆盖层较厚,30m内地质大致情况是第一层覆盖层粘土厚 1.5m,第二层细圆砾土厚10m,第三层泥岩夹泥质粉砂岩夹褐煤20m。当路线跨越江河时,前后视距将相差很大,测量的精度将会降低,另一方面仪器i角误差及大气折光的影响也会急剧增大。为了满足大桥施工放样的需要,建立高精度、高可靠性的大桥施工测量控制网是十分必要的。
二、平面控制网的测设 1、布网 GPS 平面控制网的所有控制点与桥轴线的里程起算点及桥轴线方向存在着精密的相对关系。对大跨径桥梁来说, GPS 控制网一般应由一个或若干个独立观测环构成,以三角形和大地四边形组成的混合网的形式布设。由于大跨径桥梁的实测边长在投影面上的变形影响不容忽视, 应采用工程独立坐标系, 把投影的中央子午线设定在桥梁中轴线处, 实测边长归算至测区的抵偿高程面上。在选定这些控制点时, 应注意下列问题: ⑴GPS 控制网的控制点必须能控制全桥及与之相关的重要附属工程。 ⑵桥轴线一般是控制网中的一条边。 ⑶所有控制点都必须选定在开阔、安全、稳固的地方, 便于安臵GPS 接收机和卫星信号的接收, 高度角15°以上不能有障碍物阻挡卫星信号, 远离大功率无线电发射台和高压输电线。 ⑷ GPS 控制网的图形应力求简单、刚强, 以利于提高精度。并应保证控制网的扩展和墩台定位的精度。同时还应注意边长要适中, 各边长度不宜相差过大。并方便施工定位放样和减少工作量。 利用GPS测量方法具有比传统的三角网测量方法布网灵活的优点,我们在桥址现场通视不利的情况下,通过精心设计和比选,在沿邕江两岸防洪大堤布设了如图1所示的平面控制网,在控制点上埋设顶部为半球状并刻有“十”字的钢筋头,兼作高程控制点使用。
水准测量基本原理(教案)
水准测量基本原理 课型:讲授 教学目的与要求: 了解高程测量常用的方法。 理解水准测量基本原理。 掌握高差法、仪高法及连续水准测量计算未知点高程的方法。教学重点、难点: 重点:水准测量基本原理。 高差法、仪高法及连续水准测量计算未知点高程的方法。 难点:水准测量基本原理。 采用教具: 多媒体课件 复习、提问 1、高程的定义、高差的定义。
第一讲 水准测量基本原理 一、高程测量(测定地面点高程)的方法 高程是确定地面点位置的要素之一,在工程建设的设计、施工与管理等阶段都具有十分重要的作用。测定地面点高程的工作称为高程测量。按所使用的仪器和施测方法分:水准测量、三角高程测量、气压高程测量和GPS 高程测量。 二、水准测量基本原理 水准测量不是直接测定地面点的高程,而是测出两点间的高差。即在两个点上分别竖立水准尺,利用水准测量的仪器提供一条水平视线,瞄准并在水准尺上读数,求得两点间的高差,从而由已知点高程推求未知点高程。 如图1-1所示,设已知A 点高程为A H ,用水准测量方法求未知点B 的高程B H 。在A 、B 两点中间安置水准仪,并在A 、B 两点上分别竖立水准尺,根据水准仪提供的水平视线在A 点水准尺上读数为a ,在B 点的水准尺上读数为b ,则A 、B 两点间的高差为:b a h AB -= 图1-1 水准测量原理
设水准测量是由A 点向B 点进行,如图1-1中箭头所示,则规定 A 点为后视点,其水准尺读数a 为后视读数; B 点为前视点,其水准 尺读数b 为前视读数。由此可见,两点之间的高差一定是“后视读数”减“前视读数”。如果a >b ,则高差AB h 为正,表示B 点比A 点高;如果 a < b ,则高差AB h 为负,表示B 点比A 点低。 在计算高差AB h 时,一定要注意AB h 的下标A B 的写法: AB h 表示A 点至B 点的高差,BA h 则表示B 点至A 点的高差,两个高差应该是绝对值相同而符号相反,即:BA AB h h =- 测得A 、B 两点间高差AB h 后,则未知点B的高程B H 为: )(b a H h H H A AB A B -+=+= (1-1) 水准测量:水平视线(水准仪)+水准尺→待定点与已知点高差+已知点高程→未知点高程。 三、推导以下几种计算未知点高程的公式: 1、高差法(由一点求另一点):直接利用高差计算未知点高程。 b a h AB -=(后视读数-前视读数);AB A B h H H += 2、视线高法(仪高法,由一点求多点):由仪器视线高程H i 计算未知点B 点高程。H A 为A 点的高程,a 为水准尺读数,b 为待求高程点水准尺读数。 ?? ? -=+=b H H a H H i B A i 注意事项: ①区别仅在与计算方法不同;
水准测量的基本原理及测量方法 内容:理解水准测量的基本原理;掌握DS3 型微倾式水准仪、自动安平水准仪的构造特点、水准尺和尺垫;掌握水准仪的使用及检校方法;掌握水准测量的外业实施(观测、记录和检核)及内业数据处理(高差闭合差的调整)方法;了解水准测量的注意事项、精密水准仪和电子水准仪的构造及操作方法。 重点:水准测量原理;水准测量的外业实施及内业数据处理。 难点:水准仪的检验与校正。 §2.1 高程测量(Height Measurement )的概念 测量地面上各点高程的工作, 称为高程测量。高程测量根据所使用的仪器和施测方法的不同,分为: (1)水准测量(leveling) (2)三角高程测量(trigonometric leveling) (3)气压高程测量(air pressure leveling) (4)GPS 测量(GPS leveling) §2.2 水准测量原理 一、基本原理 水准测量的原理是利用水准仪提供的“水平视线”,测量两点间高差,从而由已知点高程推算出未知点高程。
a ——后视读数A ——后视点 b ——前视读数B ——前视点 1、A 、 B 两点间高差: 2、测得两点间高差后,若已知A 点高程,则可得B点的高程: 。 3、视线高程: 4、转点TP(turning point) 的概念:当地面上两点的距离较远,或两点的高差太大,放置一次仪器不能测定其高差时,就需增设若干个临时传递高程的立尺点,称为转点。 二、连续水准测量
如图所示,在实际水准测量中,A 、 B 两点间高差较大或相距较远,安置一次水准仪不能测定两点之间的高差。此时有必要沿A 、 B 的水准路线增设若干个必要的临时立尺点,即转点(用作传递高程)。根据水准测量的原理依次连续地在两个立尺中间安置水准仪来测定相邻各点间高差,求和得到A 、 B 两点间的高差值,有: h 1 = a 1 - b 1 h 2 = a 2 - b 2 …… 则:h AB = h 1 + h 2 +…… + h n = Σ h = Σ a -Σ b 结论:A 、 B 两点间的高差等于后视读数之和减去前视读数之和。 § 2.3 水准仪和水准尺 一、水准仪(level) 如图所示,由望远镜、水准器和基座三部分组成。
水准测量的原理和使用方法 确定地面点高程的测量工作,称为高程测量。高程测量又是测量三项基本工作之一。根据使用仪器和施测方法的不同,高程测量可分为水准测量、三角高程测量和气压高程测量。用水准仪测量高程,称为水准测量,它是高程测量中最常用、最精密的方法。 水准测量的原理: 水准测量是利用一条水平视线,并借助水准尺,来测定地面两点间的高差,这样就可由已知点的高程推算出未知点的高程。测定待测点高程的方法有高差法和仪高法两种。 1.高差法 如图2-1所示,若已知A 点的高程A H ,欲测定B 点的高程B H 。在A 、B 两点上竖立两根尺子,并在A 、B 两点之间安置一架可以得到水平视线的仪器。假设水准仪的水平视线在尺子上的位置读数分别为A 尺(后视)读数为a ,B 尺(前视)读数为b ,则A 、B 两点之间的高程差(简称高差AB h )为 b a h AB -= (2-1) 于是B 点的高程B H 为 AB A B h H H += (2-2) b a H h H H A AB A B -+=+= (2-3) 这种利用高差计算待测点高程的方法,称高差法。这种尺子称为水准尺,所用的仪器称为水准仪。 图2-1 水准测量原理
2.仪高法 由式2-3可以写为 b a H H A B -+=)( (2-4) 如图2-2所示,即 b H H i B -= 上式中i H 是仪器水平视线的高程,常称为仪器高程或视线高程。仪高法是,计算一次仪高,就可以测算出几个前视点的高程。即放置一次仪器,可以测出数个前视点的高程。 综上所述,高差法和仪高法都是利用水准仪提供的水平视线测定地面点高程。必须注意 ①前视与后视的概念一定要清楚,不能误解为往前看或往后看所得的水准尺读数。 ②两点间高差AB h 是有正负的,计算高程时,高差应连其符号一并运算。在书写AB h 时,注意h 的下标,AB h 是表示B 点相对于A 点的高差;BA h 则表示是A 点相对于B 点的高差。AB h 与BA h 的绝对值相等,但符号相反。 图2-2 仪高法水准测量