位移测量装置
指导教师:田裕康
队员及年级:丁志涛 肖斌 许栋 (2005级)
学校及院系:武汉科技学院 电子信息工程学院
摘要摘要 本系统是利用差动变压器完成微小位移的测量,它以单片机C8051f020作为电机控制和数据处理的中心。系统包括正弦信号激励源、差动变压器、信号测量与数据采集、位移控制等四个部分。位移量通过LCD 显示,并实现了语言报数功能。软件设计采用了PID 调节、平均值滤波修正等算法。测试结果表明系统工作稳定,测控精度高,完全满足题目的要求。
Abstract
This system uses differential transformer to complete the small displacement measurement, which use the C8051f020 MCU to control the motor,also use it as the data processing center. The system includes incentives sine signal source, differential transformer, signal measurement and data acquisition, displacement control. The displacement is displayed by LCD as well as automatically reported by voice. Software design utilizes PID algorithm adjustment, and use the filter average to amend. Test results show that the system is stable and high-precision, which completely satisfy the requirements of the title.
一、系统方案系统方案设计与论证设计与论证
要实现满足题目要求的位移测量需要解决以下几个方面的问题:一是正弦信号激励源;二是差动变压器的设计;三是数据采集电路和电机的控制。其中的关键是在差动变压器的设计上,其对称性、线性度将直接关系到位移测量的误差。
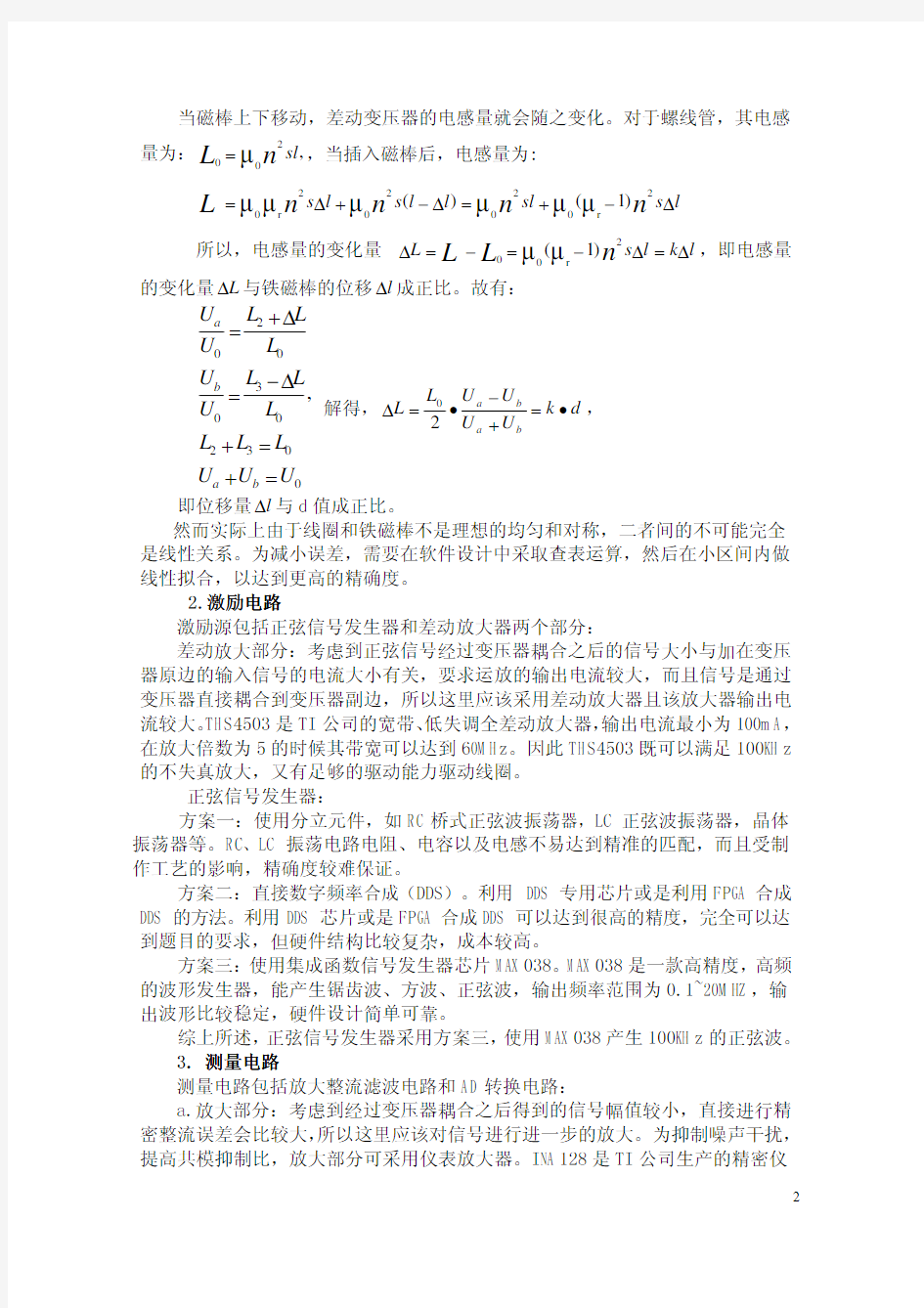
1.1.差动差动差动变压器原理变压器原理变压器原理
图1.1 螺线管式差动变压器示意图
当磁棒上下移动,差动变压器的电感量就会随之变化。对于螺线管,其电感
量为:,200μsl n L =,当插入磁棒后,电感量为:
l s sl l l s l s n n n n L ??+=??+?=2r
020202r 0)1()(μμμμμμ 所以,电感量的变化量l k l s L n L L ?=??=?=?2
r 00)1(μμ,即电感量
的变化量L ?与铁磁棒的位移l ?成正比。故有:
00
320
300
20,U U U L L L L L L U U L L L U U b a b a =+=+??=?+= 解得,d k U U U U L L b
a b a ?=+??=?20, 即位移量l ?与d 值成正比。
然而实际上由于线圈和铁磁棒不是理想的均匀和对称,二者间的不可能完全
是线性关系。为减小误差,需要在软件设计中采取查表运算,然后在小区间内做
线性拟合,以达到更高的精确度。
2.激励激励电路电路电路
激励源包括正弦信号发生器和差动放大器两个部分:
差动放大部分:考虑到正弦信号经过变压器耦合之后的信号大小与加在变压
器原边的输入信号的电流大小有关,要求运放的输出电流较大,而且信号是通过
变压器直接耦合到变压器副边,所以这里应该采用差动放大器且该放大器输出电
流较大。T H S 4503是TI 公司的宽带、低失调全差动放大器,输出电流最小为100m A ,
在放大倍数为5的时候其带宽可以达到60M H z。因此T H S 4503既可以满足100KH z
的不失真放大,又有足够的驱动能力驱动线圈。
正弦信号发生器:
方案一:使用分立元件,如R C 桥式正弦波振荡器,LC 正弦波振荡器,晶体
振荡器等。R C、LC 振荡电路电阻、电容以及电感不易达到精准的匹配,而且受制
作工艺的影响,精确度较难保证。
方案二:直接数字频率合成(DDS)。利用DDS 专用芯片或是利用F P GA 合成
DDS 的方法。利用DDS 芯片或是F P GA 合成DDS 可以达到很高的精度,完全可以达
到题目的要求,但硬件结构比较复杂,成本较高。
方案三:使用集成函数信号发生器芯片M AX 038。M AX 038是一款高精度,高频
的波形发生器,能产生锯齿波、方波、正弦波,输出频率范围为0.1~20M HZ ,输
出波形比较稳定,硬件设计简单可靠。
综上所述,正弦信号发生器采用方案三,使用M AX 038产生100KH z 的正弦波。
3. . 测量电路测量电路测量电路
测量电路包括放大整流滤波电路和A D 转换电路:
a.放大部分:考虑到经过变压器耦合之后得到的信号幅值较小,直接进行精
密整流误差会比较大,所以这里应该对信号进行进一步的放大。 为抑制噪声干扰,
提高共模抑制比,放大部分可采用仪表放大器。I NA 128是TI 公司生产的精密仪
表放大器,带宽较高,失调电压小,共模抑制比高,有利于减小电路的噪声信号,可以进一步提高系统的测量精度。所以采用了I NA128作为后端信号处理的器件。
b.整流滤波部分:
方案一:桥式整流电路。该电路经滤波处理后也可以得到直流信号,但对于本题目而言,纹波电压比较大,达不到测量精度的要求。
方案二:采用相敏检波电路。相敏检波电路可以很好的反应磁铁的位移的方向。但相敏检波的结构复杂,要用到变压器耦合和参考信号。
方案三:利用精密全波整流和R C无源滤波。利用快恢复二极管和高精度放大器做的精密全波整流可以满足题目的要求,而且误差也比较小。
由以上讨论,信号测量部分采用方案三来实现。由于题中要求处理的信号为100KH z,对运放的要求较高,为了达到较好的整流效果,需要选用带宽和速度都较高的运放。O P A606是TI公司生产的宽带放大器,带宽可达13M,压摆率为
35V/us。综合考虑,选择TI公司生产的O P A606完全可以满足题目中的各项要求,所以采用O P A606作为精密整流的运放。
c.A D采样部分:
选用TI公司的模数转换器A DS8326和精密基准源REF02共同构成数据采集系统。考虑到本设计是针对小位移的测量,A D转换器的精度直接关系到整个系统的测量精度。我们考虑选择精度为16位的A D转换器来进一步提高位移测量的精度。
A DS8326是TI公司的16位串行高速模数转换器,转换速度快,线性度好,精度高,且参考电压输入范围宽。REF02是TI公司生产的+5V精密基准源,高线性度,低噪声,低漂移,完全可以满足题目中的各项要求。由A DS8326和REF02所组成的数据采集系统完全可以将整个位移测量系统的精度提高,从而实现精密测量。
硬件系统
二、硬件系统
框图
系统总体框图
1、系统总体
框图
系统结构框图如图2.1所示:
2、激励源激励源
a.正弦信号发生器:由M AX 038以及外围电路组成。由M AX 038产生峰峰值为
2V 、频率为100KH z 的正弦波,输出波形稳定不失真,电路图如图2.2所示:
图2.2 正弦信号发生器 其中:KHz 100C R V 5.22f F
IN 0=××=
这里取C F = 0.1u F , 则R IN =500Ω。 b.差动放大器 : T H S 4503既可以满足100KH z 的不失真放大,又有足
够的驱动能力驱动线圈。其电路图如图2.3所示:
图2.3 T H S 4503原理图 其中 )(?+?+???=?=IN IN OUT OUT OUT V V 21V V V β
β 则ββ21A G ?==G F R 2R ,其中F
G G R R R +=β, 为了满足变压器的次级输出的要求,这里选择4A =G 。R G =1.5K ,R F =12K 。其
中V COM 接地。
3、线性可变差动变压器线性可变差动变压器
由于T H S 4503的输出电流达到100m A ,而电压为4V ,信号频率
100KH z,这里我们选用漆包线的直径为0.17mm,匝数比为L1:L2:L 3=2:1:1;
原边线圈为580匝,两个副边线圈为290匝。为了使此位移测量装置有较好的
线性度,一般取线圈骨架长度为测量范围的4~10倍,但受手工制作的限制,
我们只取120mm。线圈的绕法是在骨架上面先绕原边,以原边的中心为对称点,
分别绕在原边的正上方,两个次级的匝数相同绕线方向相反,且尽量在结构上
对称 。考虑到磁芯在以中心点左右移动时必须保证磁芯两端在最大位移时不
超过中心点,磁芯长度比测量范围略大,取42mm 长。
4 、测量电路测量电路
a a、、放大整流滤波部分:
⑴ 放大电路
放大电路由TI 公司的I NA 128组成,为了提高位移测量系统的灵敏度,设
定I NA 128的放大倍数为10,其电路如图2.4所示:
图2.4 信号放大电路
⑵ 精密全波整流
精密全波整流由两片TI 公司的O P A606组成,经测量输出信号波形比较稳定,
干扰很小,输出经过电容滤波后纹波电压在2m V 以内。电路如图2.5。
图2.5 精密全波整流电路
⑶ 滤波电路
经精密全波整流出来后的波形直接采用无源的R C 电路对整流后的波形进行滤波,进一步减少了干扰。原理图见附件1:
b、数据采集控制:
⑴数据采集电路
此电路采用TI 公司的A DS8326,电路如图2.6。
图2.6 A D 转换电路
⑵ 数据处理和电机控制
该部分是由C8051f020最小系统、A D 采样、电机驱动三个电路模块共同构
成的电机闭环控制系统,并经PID 算法进行控制。电机的驱动是通过P W M 电路(如图2.7)和驱动芯片L298来实现的。单片机通过变压器输出的电压值计算出磁棒移动的距离,并以此来调节电机的转速和转动方向,使磁棒移动到指定的位置,而磁棒的移动又改变了变压器输出的电压值,由此形成了一个闭环的控制系统。
图2.7 P W M 控制电路图
c、位移测量的数据计算:
设经A D 采样得L2、L 3的输出电压分别为V 2、V3,则
()()
3232V V V V +?=d 这里的d 与磁棒的位移量成一定的线性关系d =Ax(A 为常数),为简化系统的设计,我们直接采用实测的方式来确定。通过比较V 2,V 3 的大小可判断磁棒的位移方向,从而也可以控制电机的运动方向。
5、硬件设计注意事项硬件设计注意事项:: 电路在设计之初,便考虑到抗干扰措施,从元件布局到安装,均遵循电磁兼容理论,并结合学习和试验中积累的经验,设置了以下几项抗干扰措施:
a:在线路板上多处加装退耦电容,对高频和低频干扰信号均具有很强的抑
制能力。
b:信号线与地线分开,尽量避免交叉连接。另外,电源线应该尽量选择粗
一点的导线,并采用单点接地的方式,即每个芯片的地线单独用一根线连到电源
地上,这样有效的减小了噪声干扰。
c:选用的数字器件全部为CM O S 集成电路,噪声容限大,抗干扰能力强。
三、系统系统软件设计软件设计软件设计
a.软件设计流程图:
图3.1 系统程序流程图
b.软件设计说明:为了使得A D在采集A路电压和B路电压时的准确性,可在软件中用软件滤波的方法来减少A D采集电压时的误差,即每次在测量A路和B 路电压时,通过多次采样取平均来实现。试验也表明这种方法可以有效的减少测量电压的误差。另外,为了使电机的控制更加灵活和平稳,电机带动产生位移量变化的大小与误差采用了简单的PID算法来控制,即电机每移动一下,就测量一下当前位移,并与设定的位移相比较,如果超过了就改变移动的方向,如果还没有到达就继续向前移动,直到达到设定的位移为止。
系统测试
四、系统测试
1.所用仪器和测量工具
稳压电源S G1732SC3A,交流毫伏表WY2294,信号发生器GFG-8255A,毫米卷尺,60M数字示波器TDS1002 。
2.调试方法和过程
采用先分别调试再进行整体调试的方法,以提高调试效率。各个模块调试如下:
a.M AX038正弦信号发生器:上电后观察输出信号波形的失真度和频率
的稳定度。通过M AX038电路的频率调节电位器使频率为100KH z。经测量观察输出的波形很稳定,失真度也很小。
b.T H S4503差动输出:用信号发生器输入V pp为1V,频率为100KH z的
正弦信号,调节放大倍数,使其电压为4V,即得增益为4。
c.变压器调零:
目的是消除零点残余电压,除了设计工艺的精细外也可以采用拆圈的方法,以及电路补偿。这里我们直接用电位器调节,电路如图4.1。
图4.1 变压器调零电路
d.放大整流滤波电路:用信号发生器输入V pp为2V,100KH z的正弦信
号,用交流毫伏表测量输出电压的噪声信号。经测量噪声信号在2m V以下。
3.测量数据和误差分析:
a、位移的测量
系统整体调试好后,用手拨动电机的转轴,使磁铁移动一定的距离,并
记录下此时显示的位移量:
表1 位移的测量
实际位
-20 -18 -12 -8 -40 48 12 18 20 移(mm)
显示位
-20.4-18.2 -12.0 -8.0 -4.0 0 4.0 8.0 12.0 18.320.5 移(mm)
位移误
0.40.2 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.30.5 差绝对
值(mm)
分析:由数据可知,在0点位移附近误差很小,直到磁铁运动到两端
的时候误差变大,最大为0.5mm,这是受变压器边缘效应的影响。但误差仍
然远小于题目要求的2mm。
b、位移的控制
系统调试好后,通过键盘设定磁棒的位移量,让磁棒在电机的控制下
移动,直到电机停止。记录下此时的实际位移量:
表2 位移的控制
正向位移(由零点向L2移动) 负向位移(由零点向L3移动) 设定位移(mm)实测位移(mm)绝对误差(mm)设定位移(mm)实测位移(mm)绝对误差(mm)
1 1.0 0.0 -1 -1.0 0.0
2 2.0 0.0 -2 -2.0 0.0
3 3.1 0.1 -3 -3.0 0.0
4 4.0 0.0 -4 -4.1 0.1
5 5.2 0.2 -5 -5.0 0.0
6 6.2 0.2 -6 -6.2 0.2
7 7.0 0.0 -7 -7.2 0.2
8 8.2 0.2 -8 -8.0 0.0
9 9.2 0.2 -9 -9.2 0.2
10 10.2 0.2 -10 -10.0 0.0
11 11.0 0.0 -11 -11.2 0.2
12 12.0 0.0 -12 -12.2 0.2
13 13.2 0.2 -13 -13.0 0.0
14 14.2 0.2 -14 -14.2 0.2
15 15.4 0.2 -15 -15.3 0.3
16 16.4 0.4 -16 -16.2 0.2
17 17.2 0.2 -17 -17.4 0.4
18 18.5 0.5 -18 -18.5 0.5
19 19.4 0.4 -19 -19.3 0.3
20 20.5 0.5 -20 -20.4 0.4
分析:设定与实测误差最大为0.5mm,平均误差为0.17mm。完全满足题目要求。误差主要来源于外部干扰,线圈的边缘效应和读数产生的误差。
c、变压器输出检测点C的波形
系统上电后直接用数字示波器TDS1002观察变压器输出检测点C的波形,经测量该处波形十分稳定,失真度也很小。
4.改进方法:为了进一步提高测量位移的精确度以及位移测量的线性度,可以通过增加绕制差动变压器的长度来实现。另外,还可以通过提高变压器在绕制过程中的均匀性以及对称性来提高位移测量的精确度。试验表明,变压器绕制的好坏直接影响位移测量的精确度。
总结
五.总结
此设计把信号处理和电机控制结合在一起,既能实现对微小位移的测量,又实现了对磁棒移动的精确控制,误差的绝对值均小于1mm,移动范围可达
-20mm~+20mm,完成了所有的基本要求和扩展要求。设计过程中我们碰到的最大的问题是变压器的设计和制作,对这个题目而言,变压器的线性度要好,这就要求变压器的骨架长度要合适,太短了线性度达不到,太长了又要考虑绕线的困难。而且变压器的制作还要考虑前端的驱动电压和电流,匝比等,最终在试验中摸索才选择了合适的变压器。在调试过程中发现直流电机对位移的测量有一定的干扰,后经改换电机的位置将干扰消除了。本次设计大量外围器件采用了TI芯片,达到了理想的效果。
参考文献
六.参考文献
【1】徐科军传感器与检测技术 .北京:电子工业出版社,2007.
【2】华成英模拟电子技术基础. 北京:高等教育出版社,2006.
【3】孙肖子 电子设计指南.北京:高等教育出版社,2006.
【4】曾伟一 自动控制原理.北京:中国水利水电出版社,2005.
【5】许建国 电机与拖动基础.北京:高等教育出版社,2005.
附件1:
附图1 系统原理图
附件2:作品照片
物理实验报告记录《用分光计和透射光栅测光波波长》
————————————————————————————————作者:————————————————————————————————日期: 2
3 精选范文:物理实验报告《用分光计和透射光栅测光波波长》(共2篇)【实验目的】 观察光栅的衍射光谱,掌握用分光计和透射光栅测光波波长的方法。 【实验仪器】 分光计,透射光栅,钠光灯,白炽灯。 【实验原理】 光栅是一种非常好的分光元件,它可以把不同波长的光分开并形成明亮细窄的谱线。 光栅分透射光栅和反射光栅两类,本实验采用透射光栅,它是在一块透明的屏板上刻上大量相互平行等宽而又等间距刻痕的元件,刻痕处不透光,未刻处透光,于是在屏板上就形成了大量等宽而又等间距的狭缝。刻痕和狭缝的宽度之和称为光栅常数,用d 表示。 由光栅衍射的理论可知,当一束平行光垂直地投射到光栅平面上时,透过每一狭缝的光都会发生单缝衍射,同时透过所有狭缝的光又会彼此产生干涉,光栅衍射光谱的强度由单缝衍射和缝间干涉两因素共同决定。用会聚透镜可将光栅的衍射光谱会聚于透镜的焦平面上。凡衍射角满足以下条件 k = 0, ±1, ±2, … (10) 的衍射光在该衍射角方向上将会得到加强而产生明条纹,其它方向的光将全部或部分抵消。式(10)称为光栅方程。式中d 为光栅的光栅常数,θ为衍射角,λ为光波波长。当k=0时,θ= 0得到零级明纹。当k = ±1, ±2 …时,将得到对称分立在零级条纹两侧的一级,二级 … 明纹。 实验中若测出第k 级明纹的衍射角θ,光栅常数d 已知,就可用光栅方程计算出待测光波波长λ。 【实验内容与步骤】 1.分光计的调整 分光计的调整方法见实验1。 2.用光栅衍射测光的波长 (1)要利用光栅方程(10)测光波波长,就必须调节光栅平面使其与平行光管和望远镜的光轴垂直。先用钠光灯照亮平行光管的狭缝,使望远镜目镜中的分划板上的中心垂线对准狭缝的像,然后固定望远镜。将装有光栅的光栅支架置于载物台上,使其一端对准调平螺丝a ,一端置于另两个调平螺丝b 、c 的中点,如图12所示,旋转游标盘并调节调平螺丝b 或c ,当从光栅平面反射回来的“十”字像与分划板上方的十字线重合时,如图13所示,固定游标盘。 物理实验报告 ·化学实验报告 ·生物实验报告 ·实验报告格式 ·实验报告模板图12 光栅支架的位置 图13 分划板 (2)调节光栅刻痕与转轴平行。用钠光灯照亮狭缝,松开望远镜紧固螺丝,转动望远镜可观察到0级光谱两侧的±1、±2 级衍射光谱,调节调平螺丝a (不得动b 、c )使两侧的光谱线的中点与分划板中央十字线的中心重合,即使两侧的光谱线等高。重复(1)、(2)的调节,直到两个条件均满足为止。 (3)测钠黄光的波长 ① 转动望远镜,找到零级像并使之与分划板上的中心垂线重合,读出刻度盘上对径方向上的两个角度θ0和θ0/,并记入表 4 中。 ② 右转望远镜,找到一级像,并使之与分划板上的中心垂线重合,读出刻度盘上对径方向上的两个角度θ右和θ右/,并记入表4中。 ③ 左转望远镜,找到另一侧的一级像,并使之与分划板上的中心垂线重合,读出刻度盘上对径方向上的两个角度θ左和θ左/,并记入表4中。 3.观察光栅的衍射光谱。 将光源换成复合光光源(白炽灯)通过望远镜观察光栅的衍射光谱。 【注意事项】 1.分光计的调节十分费时,调节好后,实验时不要随意变动,以免重新调节而影响实验的进行。 2.实验用的光栅是由明胶制成的复制光栅,衍射光栅玻璃片上的明胶部位,不得用手触摸或纸擦,以免损坏其表面刻痕。 3.转动望远镜前,要松开固定它的螺丝;转动望远镜时,手应持着其支架转动,不能用手持着望远镜转动。 【数据记录及处理】 表4 一级谱线的衍射角 零级像位置 左传一级像 位置 偏转角 右转一级像 位置 偏转角 偏转角平均值 光栅常数 钠光的波长λ0 = 589·3 nm 根据式(10) k=1, λ= d sin 1= 相对误差 【思考题】 1. 什么是最小偏向角?如何找到最小偏向角? 2. 分光计的主要部件有哪四个?分别起什么作用? 3. 调节望远镜光轴垂直于分光计中心轴时很重要的一项工作是什么?如何才能确保在望远镜中能看到由双面反射镜反射回来的绿十字叉丝像? 4. 为什么利用光栅测光波波长时要使平行光管和望远镜的光轴与光栅平面垂直? 5. 用复合光源做实验时观察到了什么现象,怎样解释这个现象? [物理实验报告《用分光计和透射光栅测光波波长》(共2篇)]篇一:物理实验报告《用分光计和透射光栅测光波波长》 物理实验报告《用分光计和透 射光栅测光波波长》 【实验 目的】
热电偶法 热电偶是由两种小同的金属材料组成的。如果把热电偶的热节点置于微波电磁场中,使之直接吸收微波功率,热节点的温度便上升,并由热电偶检测出温度差,该温差热电势便可作为微波功率的量度。用这种原理设计成的功率计称为热电偶式功率计。又因功率测量中热电偶是做成薄膜形式的,故又叫薄膜热电偶式功率计。 热电偶式功率计由两部分组成:一个用于能量转换的薄膜热电偶座,它将微波能量转化为电动势,另一个是高灵敏度的直流放大器,用来检测热电动势。 早期的薄膜热电偶式功率计的热电偶是用铋.锑金属薄膜制成的,这种热电偶的结构示意图如图2-8所示。图中所示的结构用于同轴功率座。热电偶的节点al和a2置于同轴传输线的高频电磁场,节点b2,b1,b3分别置于同轴线的内、外导体上,它的温度保持不变。当微波功率未输入时,热电堆节点之间没有温差,因而没有输出。当微波功率输入时,通过媒质基体的电容耦合,传输到铋-锑薄膜元件,由帕尔帖效应,在a1,a2节点的温度升高,这就与节点bl,b2,b3产生温差,由温差形成热电势,即贝克塞效应。由于这里的热电堆是串联的,因此,总电势等于每对的和。由于热电偶元件可以制成极薄的片状,因此功率灵敏度较高,动态范围也很宽。 功率指示器是一个高灵敏度的直流放大器,图2-9所示为其原理图。热电偶产生的热电势经斩波器转换成交流电压,前置放大器提供了大约60dB的增益。交流信号放大后进入解调器。解调后的输出信号与功率座吸收的微波功率成正比。为了便于修正功率指示器读数,仪器的读数设有“校准系数开关”,改变其位置,就可以使直流放大器的增益随之变化,从而使指示器得到修正。 薄膜热电偶式功率计具有响应速度快,灵敏度高、动态范罔宽、噪声低和零点漂移小等突出优点,适用于多种场合下的功率测量。它的缺点是过载能力差。此外,由于它的寄 牛电抗大,要使这种同轴功率座工作到18GHz以上是很困难的。1973年出现了半导体薄膜热电偶式功率计,它的工作原理同传统的铋一锑薄膜热电偶式功率计相同,但在热偶材料和功率座的结构上做了大的改进。它是在一个0.76mm平方大小的硅片上集成了两个热电 偶。每个热电偶的电阻为100Ω,它们对高频是并联的而对直流是串联的,其等效电路如图2-10所示。 为了使0.76mm平方人小的集成式双热电偶芯片与同轴传输线的阻抗相匹配,用共面传输线将它与同轴线相连接,共面线通过一段渐变线过渡与热电偶相接。这种结构保证了热电偶与 同轴线之间的良好阻抗匹配,从而使功率座的驻波比在0.01~18GHz频率范围内小于1.4。为了不使热电偶输出的微弱信号受到干扰,直流放大器的斩波器和前置放大器置于功率座内,然后用电缆与放大器连接。这种功率指示器实现了数字化读数和自动化操作,不仅能通过指示器面板上的键盘实现人机对话式操作,还具有信息存储和数据处理能力,从而能够采取某些措施消除和修正误差,提高了测量准确度。 热敏电阻法 热敏电阻是一种具有负温度系数的电阻元件,当它的温度升高时,电阻值就变小。由于它对温度非常敏感,因此被广泛的用于微瓦和毫瓦级的功率测量中。热敏电阻大都为珠形,其直径约为0.05~0.5mm,但也有杆形的。早期使用的热敏电阻元件大多用玻璃壳封装。
中北大学 课程设计说明书 学生姓名:XXX 学号:XXXXXXXX 学院:信息与通信工程 专业:电子信息科学与技术 题目:基于PSD的位移测试装置设计 指导教师:程耀瑜、李永红职称: 教授 2013年 01 月 18 日
中北大学 课程设计任务书 12/13 学年第一学期 学院:信息与通信工程学院 专业:电子信息科学与技术 学生姓名:陆金贵学号:0905014114 课程设计题目:基于PSD的位移测试装置设计 起迄日期:2012年12月31日~2013年1月18日课程设计地点:主楼1318室,513教研室 指导教师:程耀瑜、李永红 系主任:程耀瑜 下达任务书日期: 2012年12月31日
一、PSD简介 PSD(Position Sensitive Detectors)是一种能测量光点在探测器表面上连续位置的光学探测器。PSD 由P 衬底、PIN 光电二极管及表面电阻组成。与CCD 探测器相比,PSD 有诸多优点,如位置分辨率高,响应速度快和处理电路简单等。另外,位置信号与落在探测器上的光斑形状无关。 各种精度和规格尺寸的PSD 探测器: PSD特点: 位置分辨率高、光谱响应宽、响应速度快、位置和光强同时测量、不受光斑的约束、可靠性高等。 PSD应用范围: 光学位置和角度的探测、光学遥测系统、位移和振动测量、激光对中和准直、距离测试、人类运动姿态分析等。 PSD分两种类型:一维PSD(1D-PSD)和两维PSD(称2D-PSD)探测器。本次设计中我们用到的是一维PSD,下面仅针对一维PSD作详细介绍,另对二位PSD工作原理作简要介绍。 二、一维PSD位置传感器工作原理 1D-PSD 的结构图: 图1 PSD探测器
简单机械、功和功率测试题及答案 学校:___________姓名:___________班级:___________考号:_________ __ 一、选择题(每题2分) 1.图中所示的简单机械,在使用中属于省力杠杆的是 2.升国旗的旗杆顶端有个重要的装置是() A.定滑轮 B.动滑轮C.滑轮组 D.省力杠杆 3.图中四个机械属于费力机械的是 A.动滑轮B.订书机 C.灭火器手柄D.镊子 4.如图所示,足球以初速度v沿着凹凸不平的草地从a运动到d,足球() A.在b、d两点动能相等 B.在 a、d 两点动能相等 C.从b到 c 的过程机械能减少 D.从 c 到 d 的过程重力势能减少 5.小明学了物理知识后,对图中钢丝钳的构造和外形设计,做了以下分析,其中分析错误的是() A.钳把上的花纹主要是为了美观 B.钳把用塑料制成,可以防止触电C.钢丝钳是省力杠杆 D.钳口较细是为了增大压强6.如图所示的生活用具中,使用时属于费力杠杆的是( ) A.?瓶起子 B. 镊子?
C. 钢丝钳子D.?剪纸剪刀 7.玲玲同学用水桶从水井中提水做清洁,她在把水从井底提上来的过程中,下列关于做功的说法中正确的是 A. 对桶所做的功是有用功 B. 对水所做的功是额外功 C. 对水所做的功是有用功 D. 对水所做的功是总功 8.在图17中,要将一圆柱体重物推上台阶, 最小的作用力应是() A.F1 B.F2 C.F3 D.F4 9.如图所示是正在工作的挖掘机,下列说法错误的是( ) A.机械臂A被液面压杆撑起时,相当于省力杠杆 B.挖掘机的两条履带,可以减小挖掘机对地面的压强 C.挖掘臂水平转动时,挖掘铲内土的重力没有做功 D.挖掘铲的前端做成齿状,是为了增大压强 10.如图所示,小刚对子弹击穿木板靶心前后,子弹能量变化的问题进行了思考,有以下四点看法: ①动能减少,是因为有部分机械能转化成内能 ②动能减少,是因为子弹的机械能增加了 ③动能减少,是因为子弹克服摩擦做了功 ④动能减少,是因为子弹的机械能不变 你认为他的看法中,正确的是 A.①②B.②③C.①③ D.③④ 11.下面四幅图描述的情景中属于动能转化为重力势能的是( ) A. 小刚用弹弓上行变的橡皮条将 “子弹”弹射出去
位置检测装置 位置检测装置是数控系统的重要组成部分,在闭环或半闭环控制的数控机床中,必须利用位置检测装置把机床运动部件的实际位移量随时检测出来,与给定的控制值(指令信号)进行比较,从而控制驱动元件正确运转,使工作台(或刀具)按规定的轨迹和坐标移动。 一、数控机床对检测装置的基本要求: 1)稳定可靠、抗干扰能力强。数控机床的工作环境存在油污、潮湿、灰尘、冲击振动等,检测装置要能够在这样的恶劣环境下工作稳定,并且受环境温度影响小,能够抵抗较强的电磁干扰。 2)满足精度和速度的要求。为保证数控机床的精度和效率,检测装置必须具有足够的精度和检测速度,位置检测装置分辨率应高于数控机床的分辨率一个数量级。 3)安装维护方便、成本低廉。受机床结构和应用环境的限制,要求位置检测装置体积小巧,便于安装调试。尽量选用价格低廉,性能价格比高的检测装置。 数控机床加工精度,在很大程度上取决于数控机床位置检测装置的精度,因此,位置检测装置是数控机床的关键部件之一,它对于提高数控机床的加工精度有决定性的作用。 二、位置检测装置的主要性能指标: 1.精度符合输出量与输入量之间特定函数关系的准确程度称作精度,数控机床用传感器要满足高精度和 高速实时测量的要求。 2.分辨率位置检测装置能检测的最小位置变化量称作分辨率。分辨率应适应机床精度和伺服系统的要求。 分辨率的高低,对系统的性能和运行平稳性具有很大的影响。检测装置的分辨率一般按机床加工精度的1/3~1/10选取,也就是说,位置检测装置的分辨率要高于机床加工精度。 3.灵敏度输出信号的变化量相对于输入信号变化量的比值为灵敏度。实时测量装置不但要灵敏度高,而 且输出、输入关系中各点的灵敏度应该是一致的。 4.迟滞对某一输入量,传感器的正行程的输出量与反行程的输出量的不一致,称为迟滞。数控伺服系统 的传感器要求迟滞小。 5.测量范围和量程传感器的测量范围要满足系统的要求,并留有余地。 6.零漂与温漂零漂与温漂是在输入量没有变化时,随时间和温度的变化,位置检测装置的输出量发生了 变化。传感器的漂移量是其重要性能标志,零漂和温漂反映了随时间和温度的改变,传感器测量精度的微小变化。 三、位置检测装置分类: 1.按输出信号的形式分类: 数字式:将被测量以数字形式表示,测量信号一般为电脉冲。 模拟式:将被测量以连续变化的物理量来表示(电压相位/ 电压幅值变化) 2.按测量基点的类型分类: 增量式:只测量位移增量,并用数字脉冲的个数表示单位位移的数量。 绝对式:测量的是被测部件在某一绝对坐标系中的绝对坐标位置。 3.按位置检测元件的运动形式分类: 直线式:测量直线位移。 回转式:测量角位移 四、适合锯床用传感器分析: 1.光栅 光栅是一种高精度的位移传感器,按结构可分为直线光栅和圆光栅,直线光栅用于测量直线位移,圆光栅用来测量角位移。光栅装置在数控设备、坐标镗床、工具显微镜X-Y工作台上广泛使用的位置检测装置,光栅主要用于测量运动位移,确定工作台运动方向及确定工作台运动的速度。 与其他位置检测装置相比,光栅的主要特点如下: 1)检测精度高。直线光栅的精度可达3μm,分辨率可达0.1μm。
唐山学院课程设计 一、系统工作原理光栅位移传感器的原理1.1随着主光与位移部 件固定连接,光栅位移传感器通过主光栅(即标尺光栅),则光栅组透光部分θ栅和副光栅(即指示光栅)进行相对位移,栅线间夹角为光栅位移传感器位移即形成了莫尔条纹。呈菱形,综合效果是一组等间距亮带,经过光电器件转换使黑白相间的条纹转换成正弦波变化的电时莫尔条纹也移动,信号。 (a)长光栅结构(b)莫尔条纹的形成 1 莫尔条纹的原理图电信号再经过放大器放大、整形电路整形,细分、辨向等电路,最终送到单 LCD屏显示。片机对移动的莫尔条纹进行计数,运算后送到系统整体设计框图1.2 所示:系统整体框图如图2四单光放 倍LCD片栅大频机传整位移信号细计感形屏分数器电显辨运路示向算 图2 系统整体框图 该光栅传感器检测后产生近似正弦波的电信号。光栅尺移动产生莫尔条纹,辨向电路实现模再经四细分、整形电路将正弦信号变成方波,电信号经过放大、数转换的部分使电路简单,编程容易。细-拟信号到数字信号的转变,省去了模1 唐山学院课程设计 分信号输入到单片机T0口进行计数,通过程序运算,再由LCD屏显示出运算结
果。 二、系统硬件设计 2.1放大电路设计 采用同向比例放大电路,如图3: 图3 同向比例放大电路 同相比例放大电路结构简单,比较常用,放大倍数易于调整。 采用LM324系列运算放大器(引脚图如图4),是价格便宜的差动输入功能的四运算放大器。可工作在单电源下,电压范围是3.0V-32V。
LM324的特点: 短跑保护输出1. 2.真差动输入级 3V-32V 3.可单电源工作:)LM324A 4.低偏置电流:最大100nA(每封装含四个运算放大器。 5. 具有内部补偿的功能。6. 7.共模范围扩展到负电源行业标准的引脚排列8. 输入端具有静电保护功能9. 图引脚图4 LM324 2 唐山学院课程设计 2.2整形电路设计 图5可以把幅值为0.7v~15v的正弦波转换为方波。 NE5532为一个滞回比较器,把正弦波转化为有正负值的方波,再接一级LM311,可以使方波只有5v和0v电压值。 NE5532A是一种双运放高性能低噪声运算放大器。相比较大多数标准运算放大器,如1458,它显示出更好的噪声性能,提高输出驱动能力和相当高的小信号和电源带宽。这使该器件特别适合应用在高品质和专业音响设备,仪器控制电路和电话通道放大器。 LM311的电压比较器设计运行在更宽的电源电压:从标准的±15V运算放大器到单5V电源用于逻辑集成电路。其输出兼容RTL,DTL和TTL以MOS电路。此外,他们可以驱动继电器,开关电压高达50V,电流高达50mA。
位移测量装置 指导教师:田裕康 队员及年级:丁志涛 肖斌 许栋 (2005级) 学校及院系:武汉科技学院 电子信息工程学院 摘要摘要 本系统是利用差动变压器完成微小位移的测量,它以单片机C8051f020作为电机控制和数据处理的中心。系统包括正弦信号激励源、差动变压器、信号测量与数据采集、位移控制等四个部分。位移量通过LCD 显示,并实现了语言报数功能。软件设计采用了PID 调节、平均值滤波修正等算法。测试结果表明系统工作稳定,测控精度高,完全满足题目的要求。 Abstract This system uses differential transformer to complete the small displacement measurement, which use the C8051f020 MCU to control the motor,also use it as the data processing center. The system includes incentives sine signal source, differential transformer, signal measurement and data acquisition, displacement control. The displacement is displayed by LCD as well as automatically reported by voice. Software design utilizes PID algorithm adjustment, and use the filter average to amend. Test results show that the system is stable and high-precision, which completely satisfy the requirements of the title. 一、系统方案系统方案设计与论证设计与论证 要实现满足题目要求的位移测量需要解决以下几个方面的问题:一是正弦信号激励源;二是差动变压器的设计;三是数据采集电路和电机的控制。其中的关键是在差动变压器的设计上,其对称性、线性度将直接关系到位移测量的误差。 1.1.差动差动差动变压器原理变压器原理变压器原理 图1.1 螺线管式差动变压器示意图
光栅式位移测量 欣欣机械学院 摘要光栅是高精度位移测量元件,它与数字信号处理仪表配套,组成位移测量系统,被广泛地应用于数控机床等自动化设备当中。光栅测量位移的原理主要是利用光栅莫尔条纹原理来实现的.本文主要介绍了光栅的测量位移原理以及几种干涉的测量方法,有助于简单了解光栅式位移测量。 关键词光栅莫尔条纹辨向光栅干涉 1 引言 随着人们对大量程、高分辨力和高精度的测量要求的不断深化,光栅位移测量技术正在受到越来越广泛的重视。相比于其它高精度位移测量方法,光栅位移测量在结构、光路、电路和数据处理方面都比较简单、紧凑,整个系统体积小、成本低、易于仪器化、适合于推广应用;同时,它以实物形式提供测量基准,既可以采用低热膨胀系数的石英或零膨胀玻璃等材料作为基体,也可以采用具有和钢等材料非常接近的热膨胀系数的玻璃或金属材料作为基体,稳定可靠,零点漂移极小,对环境条件的要求低,对实验研究及工程应用都非常方便,在位移测量领域具有广阔的发展前景。 传统的光栅测量系统一般是采用接受光栅副的莫尔条纹信号,然后进行电子细分和处理来实现位移量的测量。但此类基于光强幅度调制的测量系统,为达到信噪比很大的稳定输出,必须使得经莫尔条纹产生的光电输出电压的交变成分幅值尽可能大。这就要求标光栅和指示光栅之间的距离必须很小且稳定。中间不能有异物而生产现场环境恶劣,常常会因为污染而使传感器信号变坏,甚至不能工作。粗光栅位移测量系统继承了传统光栅测量的优点,同时又改进了它的不足。它采用栅距为0.635mm的反射式粗线纹光栅尺光学系统设计成物方远心光路,取消了指示光栅这种系统中光栅尺不用密封。传感头与光栅尺之间工作间隙为15mm左右,表面不怕沾有油或水。同时由于其具有自对准特性加之线纹间距大,因而具有接长方便的特点。特别适用于需要进行大范围测量和定位的各种大中型数控机床。 2 光栅式位移测量分析 2.1光栅测量原理 2.1.1光栅的分类和结构 光栅种类很多,可分为物理光栅和计量光栅。物理光栅主要是利用光的衍 射现象,常用于光谱分析和光波波长测定,而在检测技术中常用的是计量光 栅。计量光栅主要是利用光的透射和反射现象,常用于位移测量,有很高的分 辨力。计量光栅可分为透射式光栅和反射式光栅两大类,均由光源、主光栅、指 示光栅、光电元件三大部分组成。光电元件可以是光敏二极管,也可以是光电 池。透射式光栅一般是用光学玻璃或不锈钢做基体,在其上均匀地刻划出间 距、宽度相等的条纹,形成连续的透光区和不透光区。 计量光栅的结构图如图2.1所示。
光栅光谱仪的使用 学号 2015212822 学生姓名张家梁 专业名称应用物理学(通信基础科学) 所在系(院)理学院 2017 年 3 月 14 日
光栅光谱仪的使用 张家梁 1 实验目的 1.了解光栅光谱仪的工作原理。 2.学会使用光栅光谱仪。 2实验原理 1. 光栅光谱仪 光栅光谱仪结构如图所示。光栅光谱仪的色散元件为闪耀光栅。入射狭缝和出射狭缝分别在两个球面镜的焦平面上,因此入射狭缝的光经过球面镜后成为平行光入射到光栅上,衍射光经后球面镜后聚焦在出射狭缝上。光栅可在步进电机控制下旋转,从而改变入射角度和终聚焦到出射狭缝处光线的波长。控制入射光源的波长范围,确保衍射光无级次重叠,可通过控制光栅的角度唯一确定出射光的波长。 光谱仪的光探测器可以有光电管、光电倍增管、硅光电管、热释电器件和CCCD 等多种,经过光栅衍射后,到达出射狭缝的光强一般都比较弱,因此本仪器采用光电倍增管和CCD 来接收出射光。 2. 光探测器 光电倍增管是一种常用的灵敏度很高的光探测器,它由光阴极、电子光学输入系统、倍增系统及阳极组成,并且通过高压电源及一组串联的电阻分压器在阴极──打拿极(又称“倍增极”) ──阳极之间建立一个电位分布。光辐射照射到阴极时,由于光电效应,阴极发射电子,把微弱的光输入转换成光电子;这些光电子受到各电极间电场的加速和聚焦,光电子在电子光学输入系统的电场作用下到达第一倍增极,产生二次电子,由于二次发射系数大于1,电子数得到倍增。以后,电子再经倍增系统逐级倍增,阳极收集倍增后的电子流并输出光电流信号,在负载电阻上以电压信号的形式输出。
CCD 是电荷耦合器件的简称,是一种金属—氧化物—半导体结构的新型器件,在电路中常作为信号处理单元。对光敏感的CCD 常用作图象传感和光学测量。由于CCD 能同时探测一定波长范围内的所有谱线,因此在新型的光谱仪中得到广泛的应用。 3. 闪耀光栅 在光栅衍射实验中,我们了解了垂直入射时(Φ=90°)光栅衍射的一般特性。当入射角Φ=90°时,衍射强度公式为 光栅衍射强度仍然由单缝衍射因子和多缝衍射因子共同决定,只不过此时 当衍射光与入射光在光栅平面法线同侧时,衍射角θ取+号,异侧时取-号。单缝衍射中央主极大的条件是u=0,即sinΦ=-sinθ或Φ=θ。将此条件代入到多缝干涉因子中,恰好满足v=0,即0 级干涉大条件。这表明单缝衍射中央极大与多缝衍射0 级大位置是重合的(图9.1a),光栅衍射强度大的峰是个波长均不发生散射的0 级衍射峰,没有实用价值。而含有丰富信息的高级衍射峰的强度却非常低。 为了提高信噪比,可以采用锯齿型的反射光栅(又称闪耀光栅)。闪耀光栅的锯齿相当于平面光栅的“缝”。与平面光栅一样,多缝干涉条件只取决于光栅常数,与锯齿角度、形状
超声波声强测量仪 一、详细介绍 超声波在液体声扬中产生空化效应的超声波强度(声功率)仪、超声波声强测量仪是超声波系统一个最主要的指标。它对清洗机的清洗效果,超声波处理机的工作效率有直接的影响。超声波功率(声强)测量仪可随时随地,快速简便地测量声场强度,并直观地给出声功率数值。 根据使用场合不同,超声波功率测试仪可做便携式和在线监测式。 二、技术参数 名称先欧超声波声功率(声强)测量仪 型号X0-2008 / XO-2008D (带D型为高温型) 可测声强范围0~150Wcm2 可测频率范围10KHz~1MHz 探头长度30cm, 40cm, 50cm, 60cm, 100cm 使用温度0~90℃(普通型)/ 0~300℃(高温型带D) 使用介质液体酸碱值PH4~PH10(可选择耐强酸碱型) 响应时间小于0.1秒 使用电源220V,1A
三、基本配置 超声波声功率(声强)测量仪包括毫伏表一台,探头一根,无选配件。 四、技术参数 可测声强范围:0~150W/cm2 可测频率范围:10kHz~1MHz 探头长度:60cm 使用温度:0~90℃(普通型) 0~300℃(高温型) 使用说明书: 液体声场中的超声波强度(声功率)是超声波系统一个最主要的指标。它对清洗机的清洗效果,超声波处理机的工作效率有直接的影响。超声波功率(声强)测试仪可随时随地,快速简便地测量声场强度,并直观地给出声功率数值。 根据使用场合地不同,超声波功率测试仪可做成便携式和在线监测式。 工作原理: 测量仪运用的是压电陶瓷的正压电特性,即压电效应。当我们对压电陶瓷施加一个作用力时,它就能将该作用力转换成电信号。在同样条件下,作用力越强,电压越高。若该作用力的大小以一定的周期变化,则压电陶瓷就输出一个同频率的交流电压信号。由于空化作用和其他干扰,实际的电压波形是一个主波和许多次波的叠加。要了解声场的实际作用波形,建议用频谱分析仪或示波器观察。 连接: 探测仪的输出端请接通用的交流微伏表或交流毫伏表INPUT端,仪表量程一般可设定在300mv或3v。OUTPUT端输出超声波的实际波型状态。如有必要,可外接示波器或频谱分析仪观察。探棒头部是超声波的敏感区域。 测量: 手握探棒手柄,将探棒头部插入到待测区域,同时看探测仪的输出,此电压值V即代表了该测量区域的超声波强度。若电压表的量程不合适,请随时调整。 超声波声强测量仪实物图片
位移测量装置的设计 摘要:微小位移量的精确测量是测控工程技术中的一个重要课题。本文介绍了基于线性可变差动变压器的位移测量系统的系统结构,主要硬件设计和软件流程,以及相关参数的设置。硬件设计采用的直接频率合成芯片AD9851、电流负反馈高速运放AD811、高精度串行AD 转换芯片ADS7886、直流电机驱动专用芯片MC33887等高性能芯片较好地满足了低功耗、高精度、实时测控的设计要求;软件设计遵循模块化编程思想,便于系统升级。 关键词:DDS 信号 位移测量 差动变压器 单片机 运算放大器 Design of Displacement Measuring System Abstract :Accurate measurement of small displacement in measurement and control-technology is an important issue. A differential transformer displacement measuring system based on linear variable differential transformer is designed. The system structure, main hardware design, software processes and critical parameter configuration are presented. Some high performance ASIC chips used in the hardware design, such as direct frequency synthesizer chip AD9851, high-speed current feedback amplifier AD811, precision serial AD converter chip ADS7886, DC motor drive chip MC33887, which is satisfied with the design demands for the low power, high precision and realtime monitoring control. Software design follows the modular design principle, and easy to upgrade. Key words :DDS, displacement measuring, differential transformer, MCU, amplifier 1 引言 随着生产加工方式的变革、检测指标要求的提高,需要用非接触式测量方法取代传统的接触式测量。当前位移测量技术主要有以下几种:有机械的浮子方法,利用电阻、电感、电容的非电量电测量方法;有光学或激光测量方法;有利用放射性或射流技术的测量方法等。数字处理器处理能力的增强尤其是各式传感器的更新换代,使各种非接触式测量装置的设计趋于智能化。本文设计了一种基于线性可变差动变压器的位移测量装置,有着设计成本低、位移线性度好、功耗低等有点,具有一定的实用价值。 2 系统设计 2.1 位移计算方法 如图1(a )所示,初级绕组为N 1,次级绕组为N 2-1和N 2-2,初级线圈接入适当的u 1后,由于互感作用在两个次级线圈上产生的磁感应电动势为 111111E j 1jwM wM I U r jwL ?? ?=-=-+, 222111E j 1jwM wM I U r jwL ??? =-=-+ (1) 式(1)中,1 U 为初级线圈激励电压相量,M 1和M 2为次级线圈1和2的互感,r 1为初级线圈的有效电阻,L 1为初级线圈的电感。如果把两个次级线圈的同名端相连,则传感器的输出电压为 22122u u u =- (2)
实验一 双光栅测量微弱振动位移量 精密测量在自动化控制的領域里一直扮演着重要的角色,其中光电测量因为有较佳的精密性与准确性,加上轻巧、无噪音等优点,在测量的应用上常被采用。作为一种把机械位移信号转化为光电信号的手段,光栅式位移测量技术在长度与角度的数字化测量、运动比较测量、数控机床、应力分析等领域得到了广泛的应用。 多普勒频移物理特性的应用也非常广泛,如医学上的超声诊断仪、测量海水各层深度的海流速度和方向、卫星导航定位系统、音乐中乐器的调音等。 双光栅微弱振动测量仪在力学实验项目中用作音叉振动分析、微振幅(位移)、测量和光拍研究等。 【实验目的】 1. 了解利用光的多普勒频移形成光拍的原理并用于测量光拍拍频; 2. 学会使用精确测量微弱振动位移的一种方法; 3. 应用双光栅微弱振动测量仪测量音叉振动的微振幅。 【实验原理】 1. 位移光栅的多普勒频移 多普勒效应是指光源、接受器、传播介质或中间反射器之间的相对运动所引起的接收器接收到的光波频率与光源频率发生的变化,由此产生的频率变化称为多普勒频移。 由于介质对光传播时有不同的相位延迟作用,对于两束相同的单色光,若初始时刻相位相同,经过相同的几何路径,但在不同折射率的介质中传播,出射时两光的位相则不相同。对于位相光栅,当激光平面波垂直入射时,由于位相光栅上不同的光密和光疏媒质部分对光波的位相延迟作用,使入射的平面波变成出射时的摺曲波阵面,见图1。 激光平面波垂直入射到光栅,由于光栅上每缝自身的衍射作用和各缝之间的干涉,通过光栅后光的强度出现周期性的变化。在远场,我们可以用大家熟知的光栅衍射方程即(1)式来表示主极大位置: λθk d ±=sin ???=,2,1,0k (1) 式中 ,整数k 为主极大级数,d 为 光栅常数,θ为衍射角,λ为光波波长。 如果光栅在y 方向以速度v 移动,则从光栅出射的光的波阵面也以速度v 在y 方向移动。因此在不同时刻,对应于同一级的衍射光线,它从光栅出射时,在y 方向也有一个vt 的位移量,见图2。 这个位移量相应于出射光波位相的变化量为)(t φ? 图1 出射的摺曲波阵面
光栅衍射实验 系别 精仪系 班号 制33 姓名 李加华 学号 2003010541 做实验日期 2005年05月18日 教师评定____________ 一、0i =时,测定光栅常数和光波波长 光栅编号:___2____;?=仪___1’___;入射光方位10?=__7°6′__;20?=__187°2′__。 由衍射公式,入射角0i =时,有sin m d m ?λ=。 代入光谱级次m=2、绿光波长λ=546.1及测得的衍射角m ?=19°2′,求得光栅常数 ()2546.13349sin sin 192/60m m nm d nm λ??= ==+? cot cot 2m m m d d ?????==?=? ()4cot 192/601/60 5.962101802180ππ-????=+??=? ? ????? 445.96210 5.962103349 1.997d d nm nm --?=??=??= ()33492d nm =± 代入其它谱线对应的光波的衍射角,得 ()3349sin 2013/60sin 578.72 m nm d nm m ?λ?+?===黄1
()3349sin 209/60576.82 nm nm λ?+? = =黄2 ()3349sin 155/60435.72 nm nm λ?+?==紫 λ λ?== 578.70.4752nm nm λ?==黄1 576.80.4720nm nm λ?= =黄2 435.70.4220nm nm λ?==紫()578.70.5nm λ=±黄1,()576.80.5nm λ=±黄2,()435.70.4nm λ=±紫 由测量值推算出来的结果与相应波长的精确值十分接近,但均有不同程度的偏小。由于实验中只有各个角度是测量值(给定的绿光波长与级数为准确值),而分光计刻度盘读数存在的误差为随机误差,观察时已将观察显微镜中心竖直刻线置于谱线中心——所以猜测系统误差来自于分光镜调节的过程。 二、150'i =?,测量波长较短的黄线的波长 光栅编号:___2____;光栅平面法线方位1n ?=__352°7′__;2n ?=__172°1′__。
摘要 在现代工业生产过程中,常常需要测量很多不同的位移量。与此同时对位移量进行较为精确地检测,是提高控制精度的基础。因此之前所普遍采用的传统位移测量装置已经不能适应时代发展的潮流。在此情况下通过科研人员的不断努力终于研制出了数字式光电编码器,它的输入量是角位移量其输出量是相应的电脉冲,并且它有体积小,精度高的优点。故而,这次毕业设计选用的是光电编码器。 本次毕业设计是以AT89C51单片机为核心,用光电编码器来实现对位移量的精确测量,再将测量结果显示在LCD液晶显示器上。其中本次设计中所选用的是输出电压为5V的光电编码器。 本文由浅入深先介绍了一些关于位移测量的基本原理,进而阐述了各个模块的设计思路,工作过程以及显示效果。本文借鉴了一些当前较为流行的设计思想,例如硬件软件化,很好的满足了设计要求。 关键词:位移,测量,光电编码器,单片机,LCD显示器
Abstract In the control field, a variety of displacement measurements often need to be carried out. In actual industry position control domain, to increase the control precision, carries on the examination to the controlled member is accurately very important.The traditional machinery survey displacement installs has not been able to satisfy the modern production by far the need, but the digital sensor electro-optic encoder, can transform the angular displacement into with it correspondence electricity pulse output, mainly uses in the mechanical position and the velocity of whirl examination, has the precision to be high, volume small and so on characteristics, therefore this design decided that uses the electro-optical encoder to carry on the displacement to examine. This design to use the electro-optical encoder to realize the displacement survey and the simulation, realizes the survey from the exterior different displacement value and the demonstration. Makes concrete using at89C51 monolithic integrated circuit is the core, the electro-optical encoder carries on the displacement to survey, simultaneously by LCD liquid crystal display module demonstration. This design uses the electro-optical encoder output voltage is 5V, the output signal after four doubling circuit processing sends in the monolithic integrated circuit to carry on counting processing, finally sends in the LCD module demonstration. In this paper, detailed working process of displacement measurement system is started with principle ofdisplacement measurement, and hardware circuit design and display. This paper has absorbed the idea of hardware and software to achieve with the subject required functionality. Key words:The displacement surveys, electro-optical encoder, microcontroller, LCD display module
物理实验报告《用分光计和透射光栅测光波波长》 【实验目的】 观察光栅的衍射光谱,掌握用分光计和透射光栅测光波波长的方法。 【实验仪器】 分光计,透射光栅,钠光灯,白炽灯。 【实验原理】 光栅是一种非常好的分光元件,它可以把不同波长的光分开并形成明亮细窄的谱线。 光栅分透射光栅和反射光栅两类,本实验采用透射光栅,它是在一块透明的屏板上刻上大量相互平行等宽而又等间距刻痕的元件,刻痕处不透光,未刻处透光,于是在屏板上就形成了大量等宽而又等间距的狭缝。刻痕和狭缝的宽度之和称为光栅常数,用d 表示。 由光栅衍射的理论可知,当一束平行光垂直地投射到光栅平面上时,透过每一狭缝的光都会发生单缝衍射,同时透过所有狭缝的光又会彼此产生干涉,光栅衍射光谱的强度由单缝衍射和缝间干涉两因素共同决定。用会聚透镜可将光栅的衍射光谱会聚于透镜的焦平面上。凡衍射角满足以下条件 k = 0,±1,±2, (10) 的衍射光在该衍射角方向上将会得到加强而产生明条纹,其它方向的光将全部或部分抵消。式(10)称为光栅方程。式中d为光栅的光栅常数,θ为衍射角,λ为光波波长。当k=0时,θ= 0得到零级明纹。当k = ±1,±2 …时,将得到对称分立在零级条纹两侧的一级,二级… 明纹。
实验中若测出第k级明纹的衍射角θ,光栅常数d已知,就可用光栅方程计算出待测光波波长λ。 【实验内容与步骤】 1.分光计的调整 分光计的调整方法见实验1。 2.用光栅衍射测光的波长 (1)要利用光栅方程(10)测光波波长,就必须调节光栅平面使其与平行光管和望远镜的光轴垂直。先用钠光灯照亮平行光管的狭缝,使望远镜目镜中的分划板上的中心垂线对准狭缝的像,然后固定望远镜。将装有光栅的光栅支架置于载物台上,使其一端对准调平螺丝a ,一端置于另两个调平螺丝b、c的中点,如图12所示,旋转游标盘并调节调平螺丝b或c ,当从光栅平面反射回来的“十”字像与分划板上方的十字线重合时,如图13所示,固定游标盘。 物理实验报告·化学实验报告·生物实验报告·实验报告格式·实验报告模板 图12 光栅支架的位置图13 分划板 (2)调节光栅刻痕与转轴平行。用钠光灯照亮狭缝,松开望远镜紧固螺丝,转动望远镜可观察到0级光谱两侧的±1、±2 级衍射光谱,调节调平螺丝a (不得动b、c)使两侧的光谱线的中点与分划板中央十字线的中心重合,即使两侧的光谱线等高。重复(1)、(2)的调节,直到两个条件均满足为止。 (3)测钠黄光的波长 ① 转动望远镜,找到零级像并使之与分划板上的中心垂线重合,读出刻度盘上对径方向上的两个角度θ0和θ0/,并记入表4 中。