交流感应电动机无速度传感器的
高动态性能控制方法综述
清华大学 杨耕
上海大学 陈伯时
摘要:文章分析了交流感应电机无速度传感器的高动态性能控制方案的控制要点。在介绍国内外产业界已实用化的、以及正在研发中的几种代表性的控制策略的同时,讨论了各种方法理论要点和实际应用中的特点。最后,介绍了当前的几个研究热点问题并就发展方向提出了一点设想。
关键词:异步电动机控制 无速度传感器 转矩控制 磁链观测 速度辨识
Rev iew the M ethods for the Speed Sen sor-less Con trol of I nduction M otor
Yang Geng Chen Bo sh i
Abstract:T h is paper analyzes theo retical po ints of the i m p lem entati on fo r h igh perfo r m ance contro l of in2 ducti on mo to r w ithout speed senso r.A fter that,typ ical app roaches of the contro l strategy,w h ich are used in p ractical p roducts o r are being developed recently,are p resented and the characteristic of each app roach is dis2 cussed.F inally,som e unso lved p roblem s being researched as w ell as the develop ing po tentials are introduced.
Keywords:contro l of inducti on mo to r speed senso r2less to rque contro l flux observer speed identifica2 ti on
1 前言
交流感应电机的无速度传感器高动态性能控制,是为了实现与有速度传感器的矢量控制(或直接转矩控制)相当的转矩和速度性能的方案,被用于无法设置速度传感器的设备或新一代高性能通用变频器之中[1,2]。相关的理论与技术也成为近10年来交流传动领域的热门研发内容之一。
本文主要综述在无速度传感器的前提下,具有速度反馈控制环的矢量控制方案(V C)和直接转矩控制方案(D TC),而不讨论诸如“V F控制+为补偿负载变动的滑差补偿”等只考虑静态的方法。本文在介绍各种方法的同时,综述其理论要点和实际应用中的特点、介绍所应用的厂家,从中总结出实现高动态性能控制的要点及主要成果。最后,介绍当前几个研究热点问题。
2 控制方法
211 方法分类的出发点
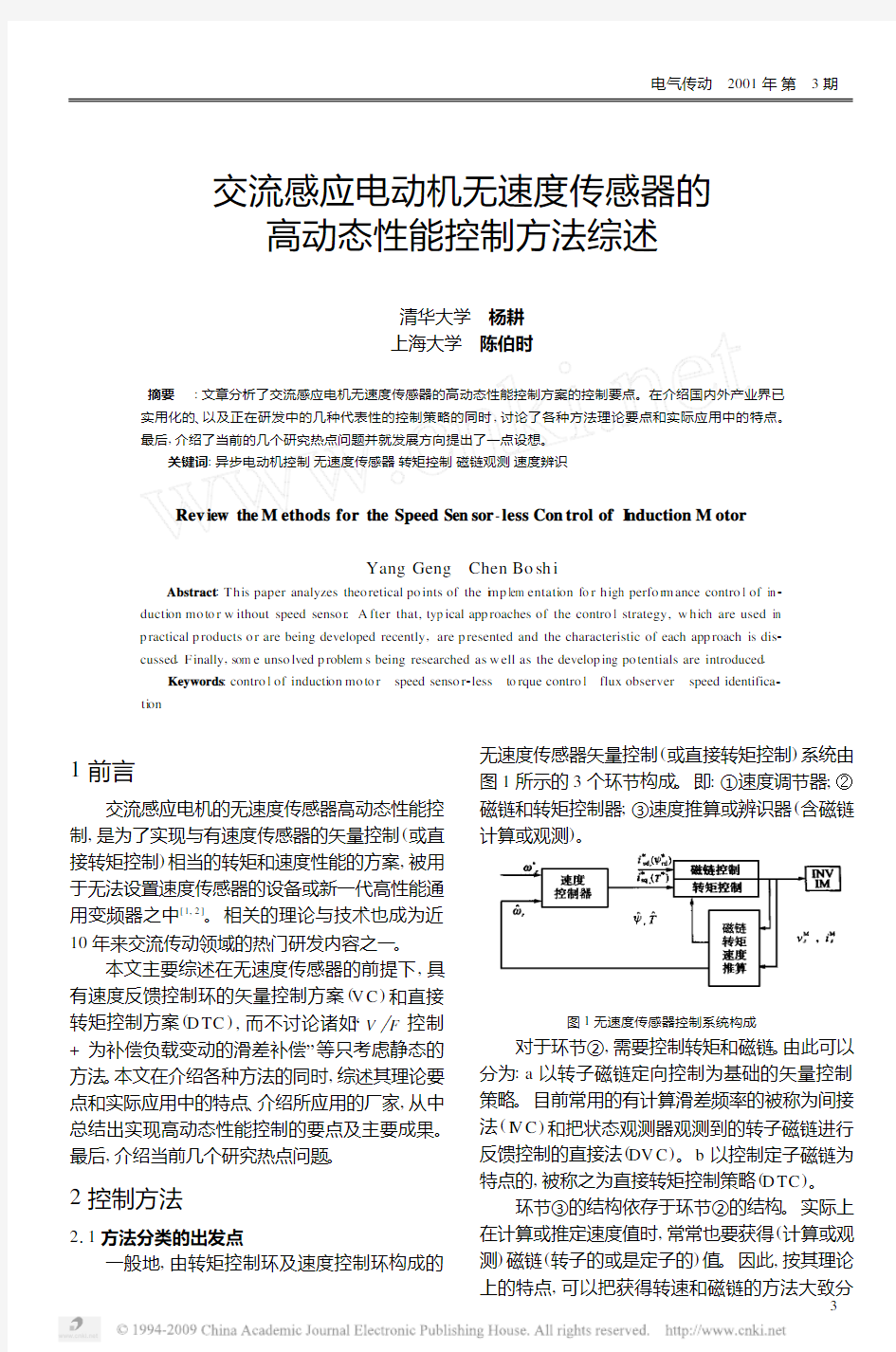
一般地,由转矩控制环及速度控制环构成的无速度传感器矢量控制(或直接转矩控制)系统由图1所示的3个环节构成。即:①速度调节器;②磁链和转矩控制器;③速度推算或辨识器(含磁链计算或观测)
。
图1 无速度传感器控制系统构成
对于环节②,需要控制转矩和磁链。由此可以分为:a以转子磁链定向控制为基础的矢量控制策略。目前常用的有计算滑差频率的被称为间接法(I V C)和把状态观测器观测到的转子磁链进行反馈控制的直接法(DV C)。b以控制定子磁链为特点的,被称之为直接转矩控制策略(D TC)。
环节③的结构依存于环节②的结构。实际上在计算或推定速度值时,常常也要获得(计算或观测)磁链(转子的或是定子的)值。因此,按其理论上的特点,可以把获得转速和磁链的方法大致分
3
电气传动 2001年 第3期
为两大类。一是利用电机的状态方程进行计算的方法,叙述于212。二是利用自适应状态观测器观测磁链并辨识转速的方法(214)。还有一些方法是这两类方法的变型,叙述于213。
作为本文分析的基础,列出在两相静止坐标轴Α,Β上的方程式如下[3]
定子方程 v M s =R s i M s +p 7M
s
(1)转子方程 0=R r i M r +(p +J ΞM r )7M
r (2)定子磁链 7M s =L s i M s +M i M r (3)转子磁链 7M r =M i M s +L r i M r
(4)
式中 v M s ——定子电压,v M s =[v M s Α,v M s Β]T
i M s ——定子电流,i M s =[i M s Α,i M s Β]T 7M s ——定子磁链,7M s =[7M s Α,7M s Β]T 7M r ——转子磁链,7M r =[7M r Α,7M r Β]
T ΞM r ——转子频率 p =d d t J =
0-
1
1
0
也可以改写为电压和电流模型方程[4]
p 7M r =(L r M )[v M s -(R s +ΡL s p )i M s ]
(5)p 7
M
r
=(-1 Σr +J ΞM
r
)7M r
+(M Σr )i
M s
(6)
在本文中,上角字母M 为电机参数或变量,3为指令或设定,^为推算值,T 为矢量或矩阵的转置。
212 基于电机状态方程的计算21211 利用反电势计算转速[4~7]
在转子磁链定向的旋转坐标{d ,q }上(d ,q 分别为同步旋转坐标系上的励磁轴和转矩轴),由式(5)电压模型可得
E M r =(M L r )(p +J Ξ1)7M r
=v M s -[R s +ΡL s (p +J Ξ1)]i M
s
(7)
式中 Ρ=1-M 2
(L s L r ) Ξ1——同步(定子)频率
E M r ——反电势,E M r =[E M rd ,E M rq ]
T
7M r ——转子磁链,7M r =[7M rd ,7M rq ]
T 在估算Ξ
δr ,Ξδ1时,为了简化算式,假定矢量控制已被实现,则由于转子磁链的反馈控制在稳态时有
7M rq =0,7M rd =con st =73
rd 。于是
Ξδ1=(L r M )E M rq 73rd
Ξδr =Ξδ1-Ξ3
sl p
(8)
上式的E M rq 由式(7)可得,而转子的转差频率Ξ3
sl p 和
磁链73rd 由矢量控制器中给出。计算时所用的参数为R s ,R r ,L s ,L r ,M 。
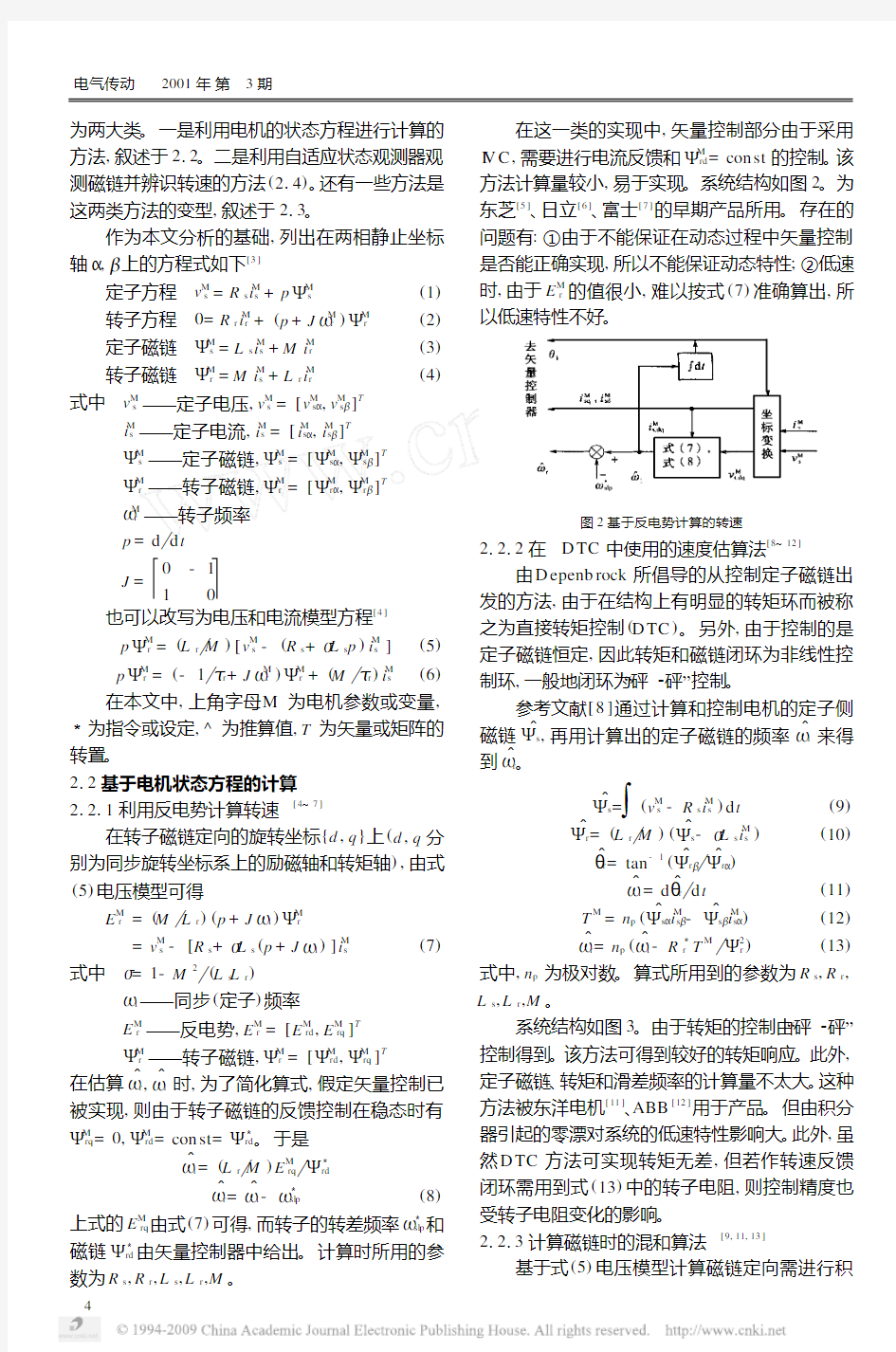
在这一类的实现中,矢量控制部分由于采用
I V C ,需要进行电流反馈和7M
rd =con st 的控制。
该方法计算量较小,易于实现。系统结构如图2。为东芝[5]、日立[6]、富士[7]的早期产品所用。存在的问题有:①由于不能保证在动态过程中矢量控制是否能正确实现,所以不能保证动态特性;②低速时,由于E M r 的值很小,难以按式(7)准确算出
,所以低速特性不好。
图2 基于反电势计算的转速
21212 在D TC 中使用的速度估算法[8~12]
由D epenb rock 所倡导的从控制定子磁链出发的方法,由于在结构上有明显的转矩环而被称之为直接转矩控制(D TC )。另外,由于控制的是定子磁链恒定,因此转矩和磁链闭环为非线性控制环,一般地闭环为“砰2砰”控制。
参考文献[8]通过计算和控制电机的定子侧
磁链7δs ,再用计算出的定子磁链的频率Ξ
δ1来得到Ξ
δr 。7δs =∫
(v M s -R s i M
s )d t
(9)7δr =(L r M )(7δs -ΡL s i M s )
(10)Ηδr =tan -1(7δr Β 7δr Α)
Ξδ1=d Ηδr d t
(11)T M =n p (7δs Αi M s Β-7δs Βi M s Α)
(12)Ξδr =n p (Ξδ1-R 3
r T M 72r )
(13)
式中,n p 为极对数。算式所用到的参数为R s ,R r ,
L s ,L r ,M 。
系统结构如图3。由于转矩的控制由“砰2砰”控制得到。该方法可得到较好的转矩响应。此外,定子磁链、转矩和滑差频率的计算量不太大。这种
方法被东洋电机[11]、ABB [12]
用于产品。但由积分器引起的零漂对系统的低速特性影响大。此外,虽然D TC 方法可实现转矩无差,但若作转速反馈闭环需用到式(13)中的转子电阻,则控制精度也受转子电阻变化的影响。
21213 计算磁链时的混和算法[9,11,13]
基于式(5)电压模型计算磁链定向需进行积
4
电气传动 2001年 第3期
图3 直接转矩控制系统的构成
分运算,而基于式(6)电流模型计算时精度又受转
子电阻变化的影响。参考文献[13]提出将前者和在I V C 控制时得到的后者用频率的加权函数混合起来,使得在低速段主要由式(6)的计算值起主导作用,而在其他速段由式(5)的计算值起主导作用。实验结果表明有较好的效果。
参考文献[9]提出了一种基于定子磁链的V C 方案,参考文献[9]将式(9)的积分改为数字式低通滤波器(L PF ),并且L PF 的时间常数和增益随同步频率而变。这一思路同214变极点的观测器的思路一致。此外参考文献[9]采用图4所示的切换,在低速和起动时对式(14)所示的滑差频率进行积分作为定子磁链7δs 的相角,在中高速段则按式(9)计算相角。
Ξδsl p =(1+ΡΣ3r p )L s i M
sd Σ3r (73sd -ΡL s i M sq )(14)式中 Σ3r
——计算用转子时间常数
由图4知,2个状态之间的切换并不连续,因此速度有跳变的现象
。
图4 I V C 和DV C 的切换图[9]
对于D TC 方式,参考文献[11]先用式(6)计
算转子磁链7δr 以避免积分运算,然后按下式换算出定子磁链
7δs =ΡL s i M s +(M L r )7δr
213 基于实际量与计算量之间的误差推算方法
从物理概念看,推算的电机转速Ξ
δr 与实际转速ΞM r 之间的误差,一定会引起指令转矩与实际转
矩(或转矩电流分量)或指令励磁与实际励磁(或励磁电流分量)之间产生误差,可以用这些误差去
推算Ξ
δr ,其结果将实现转矩无差控制。事实上,这类方法为214所述方法的简化。
21311 基于转矩电流误差推算转速[14~16]
在参考文献[14]中,假定矢量控制可使i M sd =
i 3
sd 或7
M
rd
=7
3rd
,可以用下式所表达的转矩电流误
差来推算转速
Ξδr =(K p +K I p )(i 3sq -i M sq )
(15)
式中 K p ,K I ——P I 参数
P I 控制保证了Ξδr 趋于真值时电流误差为零。
为了保证7M rd =73
rd ,需要利用式(5)计算
7M
r 。
为了避免对式(5)直接积分,参考文献[14]采用了如下式所示的磁链指令73r 与p 7M
r 组合的变量7δ′r
7δ′r =[73r +T C (p 7M
r )]
(1+T C p )(16)
在稳态时有 7δ′r =73r =7M
r
式中T C 是一阶L PF 的时间常数。而p 7M r 由式(5)计算。该方法用到的参数为R s 、L s 、L r 、M ,而
R r 在I V C 中被用到。系统结构见图5
。
图5 基于转矩电流误差推算转速
本方法被用于安川[14]、日立[15]、明电舍[16]的一部分产品之中。由式(16)可知,该方法同样也存在低速问题。此外,由于T C 为常数,式(16)的极点不随电机的极点的变化而变化,不能保证系统在整个调速范围有较好的动态性能。
图6 基于串联双模型的推算
21312 基于串联双模型所计算出的电压误差方
法[17,18]
为了避免对转子磁链作积分运算。参考文献
[17]采用图6所示的结构,用实际电压与观测器
的输出电压之间的误差来推算转速,即
v δs =(R s +ΡL s p )i M s +(M L r )p 7δr
(17)
5
电气传动 2001年 第3期
Ξδr =(K p +K I p )( v M 1 - v δ1 )
(18)式中,K P 、K I 为P I 参数,“ ”
为绝对值符号。这类方法实际上已有了M RA S 方法的思想。但文中对稳定性讨论不够。一个更好的算法见参考文献[18]
21313 以电压方程为参考模型的M RA S 方
法[19,20]
如果把速度推定归结为参考辨识,则可以用模型参考自适应理论(M RA S )
来构筑能够辨识速度的系统。在这种情况下系统为非线性系统,于是可用波波夫的超稳定理论在保证系统稳定的条件下推导出辨识算法。
如图7所示,以交流电机的电压方程(5)为参考模型,以电流方程(6)为可调节模型。如果通过
调节可调节模型中的被辨识的速度Ξ
δr ,从而使两模型的输出之差趋于零,则此时的Ξδr 将趋于ΞM
r 。由于参考文献[19,20]采用了波波夫超稳定理论推导出式(19)并证明了该系统的稳定性,在行业中引起了较大的反响。
参考文献[19]按下式推算转子转速
Ξδ′
r =(K P +K I p )(7M
r Β7δr Α-7M r Α7δr Β)
(19)
为了避免用式(5)求解转子磁链7M r 时的积分运
算,参考文献[19]也采用了“反电势+L PF ”的物理量来替代对磁链的计算。由此,这一方法也难以解决低速问题。该方法被用于三菱的一部分产品之中[20]。
图7 以电压方程为参考模型的M RA S
214 基于自适应全阶状态观测器的M RA S 方法
从控制理论的观点出发,未知的电机状态量(或参数)为转速和磁链(定子的或转子的),这些都可以用一个状态观测器获得。把转速作为参数来辨识使得观测器呈线性。以下的两个理论上的突破使得采用该观测器的实际系统得以实现。
1)变极点的状态观测器。由电机的状态方程知,电机的极点随转速而移动。为了保证转子转速在任意状态下观测器的稳定性,需要采用变极点的状态观测器。即该状态观测器的极点为转速的函数,并一直保持在电机的极点的左侧。
2)基于M RA S 方法构成全阶的自适应观测
器从而得到可保证系统渐进稳定的转速辨识算
法。
对于以[i M s ,7M r ]
T
为状态方程的电机模型(20),全阶观测器的变量为[i δs ,7δr ]T
,方程式为式(21)。
p i M s
7
M r
=A
i M s
7
M
r
+
B 1
v M
1
(20)
p
i δs
7
δr
=A
i δs
7
δr
+
B 1
v M 1+G (i δs -i M
s )(21)
式中 A 、B 1——电机的相应状态矩阵和输入矩
阵
G ——状态观察器增益矩阵
如图8所示,系统依据状态i M s 与i δs 之间的误
差,在调节辨识参数Ξ
δr 趋向真值的同时,使状态[i δs ,7δr ]T
趋向真值。
图8 基于自适应观察器的M RA S 方法
21411 滑模观测器(Sliding O b server )[21]
参考文献[21]的作者在以前研究过的采用H ∞理论设计的滑模观测器的基础上构成了能满
足李雅普诺夫函数的辨识算法
Ξ
δr =∫
g k 0k 1[sgn (i M
s -i δ
s )]T
J 7δ
r d t
(22)
式中 g ——观测器增益 k 0=ΡL s L r M
k 1——滑模控制器的增益
此算法类似于下一个方法中的算法。实验结果显示,系统由于采用H ∞来设计观测器的极点,因此,具有较强的抗干扰性。21412 L ueberger 观测器(L SO )[22~25]
该系统是在全阶的观测器基础上构筑同时可辨识作为参数的电机转速的辨识环节。理论及实验证明按式(21)和式(23)构成的该系统可以在同步频率Ξ1=0以外的任意转速和任意负载条件下稳定运行。
Ξδr =(K P +K I p )(7δr )T J (i M s -i δs )(23)
式中 K P 、K I ——调节器的参数
6
电气传动 2001年 第3期
上式可变换为
Ξδr =(K P +K I p )(T M -T δ)
(24)式中 T δr 、T M
——输出转矩的估计值和实际值该式反映了式(23)的物理意义。
由式(23)看出,所用的是转子磁链的观测值,而不是微分值或是“微分+L PF ”。此外,由于感应电机在任何状态下都至少有电流的励磁分量,所以可保证上式总有输入激励。试验证明,该方法在全速域的稳定性及动态特性较好,但运算复杂,需要用高级的微处理器。
参考文献[25]在系统采用波波夫超稳定理论证明系统的渐近稳定性的同时,进一步给出了观测器增益的值域,并统一解析了其他基于线性方程的转速推定算式。
此外,参考文献[21,23]等证明了此方法的转矩控制无静态误差。但是,对于转子电阻所引起的速度辨识误差如下式所示。此方法可用于有速度传感器系统的转子电阻的辨识。
?Ξr =Ξδr -ΞM
r
=(R M r -R 3r )Ξ3sl p R 3
r (25)事实上电机的状态之一的磁链可以选转子磁
链,也可以选定子磁链。两者关系如式(
3)、式(4)所示。但已发表的文章皆集中于选转子磁链为状态变量。目前还没有看到基于定子磁链的控制系
统中采用自适应观测器来推定和辨识{Ξδr ,7δs }。但
如果仅基于状态方程去辨识包括零速在内的全速度领域的速度值,则有可能还需利用自适应全阶观测器的思路。215 其它[26~29]
此外,还有利用“注入高次谐波”、以获取转速信息的方法[26]、利用由转子槽产生的谐波和快速富里埃变换的方法[27]、利用“神经网络”去估算速度的方法[28]和扩展卡尔曼滤波器的方法[EKF ][29]。
在参考文献[29]中,转速ΞM r 被考虑成状态变量,因此交流电机的状态方程呈非线性。该文对方程线性化以后使用扩展卡尔曼滤波器。线性化时假定在采样期间ΞM r =con st 。遗憾的是论文并没有给出系统的稳定性分析。
参考文献[3]对①完全按方程计算速度(SE )[3],②第21313节的M RA S [19],③第21412节的L SO [22]和④EKF 方法[29],采用下列指标进行了仿真评价:
1)稳态误差(S T E :Steady State E rro r );
2)动特性(DB :D ynam ic B ehavi o r );
3)低速特性(L S :L ow Speed Operati on );4)参数灵敏度(P S :Param eters Sen sitivity );5)抗噪音(N S :N o ise Sen sitivity );
6)构成系统复杂度(C :Com p lex )(指要凭经
验设计参量的多少);
7)计算量(CT :Com pu tati on T i m e )。
结果为表1。由此表看出基于自适应状态观测器的方法具有相对的优良特性。
表1 仿真结果
方法
S T E
DB
L S
PS
N S
C
CT
S E 2332423M RA S 2342434L SO 1121222E K F
2
2
2
2
1
4
5
注:好:1,较好:2,一般:3,较差:4,差:5
3 几个研究热点
311 同步转速为零时的收敛[30]及低速的稳定运
行
最近发现,在同步转速为零时若有负载使得系统处于制动状态运行,即使是性能较好的全阶自适应状态观测器(L SO )的方法也不能使转子转速和转子磁链收敛到真值。如图9所示,此时的转子转速为滑差频率。实际上,转子转速估计式(23)只包含了电机定子电流项。而由于在同步转速为零的状态下,转子磁链的变化并不能反映到定子电流中。所以只由定子电流来构成估计方程,势必在该状态下不能达到无静差的估计。为了解决这一问题,可采用增加新的辅助激励或寻找新的辨识算法等方法。
图9 Ξ31=0时的制动状态
此外即使是电动状态,在低速区域导致系统
不易正常运行的因素还有多种。
1)利用已有的电机电压电流信号来推算转子转速的各种算法,其收敛的速度基本上正比于同步频率。因此极低速时由其构成的速度闭环难以满足较高的动态要求。
7
电气传动 2001年 第3期
2)PWM波形的输出电压由于量化误差、死区时间、管压降等原因已变得三相不平衡并难以准确地得到,也使得三相电流严重畸变并且不平衡。需要经济有效的方法快速检测输出电压。
3)通用电机的低速特性如M电感等发生了变化,需要量化其变化并改善其影响。
312 定、转子电阻变化的补偿
以上只是考虑了辨识转子转速的问题。由于电机的参数的变化特别是定子电阻和转子电阻的变化会直接影响到系统的动静态特性,还希望在线同时辨识定子电阻和转子电阻。已有同时辨识定子电阻与转子转速的研究成果[22]。若同时辨识转子电阻与转子转速,需要增加新的辅助激励[24]。也有用定子电阻的变化来估算转子电阻的变化的方法[31]。实际上,采用M RA S的方法可同时完成多个参数的辨识。但要保证参数估计和状态观测同时收敛于各自的真值。
313 计算(辨识)出的转子转速构成速度闭环时系统的稳定性
一些论文讨论了转子转速的计算(辨识)单元的稳定性问题。而对于用计算(辨识)出的转子转速构成速度闭环时的系统,由于系统的复杂性,多用试验验证其稳定性,而缺少从理论上的较为严格的证明[30,32]。
4 结论
1)本文归纳了一些主要方法的特点。由此,反映出在构成系统时,需要根据应用对象对速度算法的低速特性或动态特性等的不同要求,和所采用的D SP的能力,选择较为合适的方法。
2)从理论的角度有以下几点总结,供读者参考。
①无速度传感器的高动态性能控制(矢量控制,直接转矩型等)需要推算转子的速度。而推算转速的关键是如何获得(计算或观测 间接或直接地)磁链(转子的或是定子的)值。
②采用全阶的自适应状态观测器同时观测转子磁链和辨识转速的方法,其综合指标较优。随着具有较好的价格性能比的浮点小数运算的D SP的采用,该方法可被产业化。
全阶的自适应状态观测器可用于无速度传感器系统的速度辨识,也可用于有速度传感器系统的转子电阻的辨识。
③对于无速度传感器下的I V C、DV C或
D TC方法,转矩控制皆是静态无差,但速度的计算误差正比于转子电阻的真值与计算值之间的误差。
④所有的方法都要用到电机的参数(R s、R r、L s、L r)。一部分论文对电机参数变化的影响作了分析。尚需深入分析参数变化对各种系统的定量性的影响。有关参数的离线检测已有许多方法。但需研发更有效的在线检测方法。
⑤进一步改善系统的低速特性是一个难点,也是研发工作的热点。希望有新的思路和办法。
参考文献
1 R ajashekara K et a l.Senso rless Contro l of A C M o to r D rives, Speed and Po siti on Senso r2less Operati on.IEEE p ress,1996 2 陈杰,李永东1异步电动机控制策略及无速度传感器系统综述1中国EA CS第9届学术年会论文集1998:29~40
3 Ilas C et a https://www.doczj.com/doc/6c9478645.html,parison of D ifferent Schem es w ithout Shaft Senso rs fo r F ield O riented Contro l D rives.Conf.R ec.IEEE2 IECON’94,1994:1579~1588
4 大谷他1速度 べ 制御におけゐ电动机±
一 の低感度化1日本电学论D,1990,110(5):497~
505
5 宫崎1 速度制御の应用1日本平3年电气学会全国大会,1991,(S-9-5-2)
6 户张他1速度 べ 制御の高应答化の检讨1日本平6年电气学会全国大会,1994,(1644)
7 T aji m a H et a l.Speed Senso r2less V ecto r Contro lM ethod fo r an Industrial D rive System.Conf.R ec.IEEE PCC,Yoko2 ham a,1995:1034~1039
8 Xu X,N ovo tny D W.I mp lem entati on of D irect Stato r F lux O rientati on Contro l on a V ersatile D SP Based System.IEEE
I A S227,1991,(4):694~700
9 Bo se B K,Si m oes M G.Speed Senso r2less H ybrid V ecto r Contro lled Inducti on M o to r D rive.Conf.R ec.IEEE2I A S’95, 1995:137~143
10 Baader U et a l.D irect Self Contro l(D TC)of Inverter2Fed Inducti on M ach ine:A Basis fo r Speed Contro l w ithout Speed M easurem ent.IEEE,I A S228,1992,(3):581~588
11 M iyash ita,I Omo ri Y.A N ew Speed O bserver fo r an Induc2 ti on M o to r U sing the Speed E sti m ati on T echnique.Conf.
R ec.EPE’93,1993:349~353
12 Jam es N.N ash.D irect To rque Contro l,Inducti onM o to r V ec2 to r Contro l w ithout an Encoder.IEEE,I A S233,1997,
(2):333~341
13 Sinnaka S.N ew H ybrid V ecto r Contro l fo r Inducti on M o to r w ithout V elocity and Po siti on Senso rs.Japanese:IEEE of Japan T rans.1998,1182D(7 8):843~854
(下转第22页)
8
数据上看,当负载较大时,采用一阶滑模控制器的系统存在很大的静差,难以达到高的定位精度。而采用混合型控制器的系统可获得无差响应特性,可满足高精度伺服控制的要求。
5 结论
将滑模变结构控制应用于交流伺服控制,必须解决由于传统的开关控制带来的抖动问题。常用的办法是,在开关点附近将控制量连续化,如果采用线性化的连续处理方法,那么在边界层内系统可近似为线性系统,可采用线性系统的相关理论进行分析和设计。滑模控制器的动态设计,就是利用线性系统的动态滤波器理论进行滑模控制器设计的方法。其中,常用的是一阶和二阶滑模设计方法。一阶滑模控制器具有响应快、稳定性好等优点;二阶滑模控制器具有无静差的优点。将二者结合起来就形成了混合型滑模控制器。实验证明,采用本文中方法设计的混合型滑模控制器具有良好的动、静态性能,在工程中有着广泛的应用前景。
参考文献
1 Belhocine M et a l.Robo t Contro l U sing a SlidingM ode.Inter2 nati onal Sympo sium on Intelligent Contro l,1997,(16-18): 361~366
2 Chang L iang W ey et a l.A V ersatile Sliding Contro l w ith a Second2o rder Sliding Conditi on.Am erica contro l conference, 1994:54~55
3 Chang L iang W ey et a l.A Robust M o ti on Contro l of A ctua2 to r in D isk F iles.Am erica Contro l Conference,1994:49~53 4 H akan ELM AL I et a l.Robust O utput T rack ing of N onlinear M i m o System via Sliding M ode T echnique.Am erica contro l conference,1994:56~57
5 Xu J ian X in et a l.V ariable Structure Contro l of R igid F lexi2 ble C lo sed2chain System s.Am erica contro l conference,1994: 1903~1908
6 Go rez R et a l.D esign of P I D Robo t Contro llers V ia V SS
A p roach.IFA C Robo t Contro l,N antes,F rance,1997:131~
138
收稿日期:1999209214
(上接第8页)
14 O h tani T et a l V ecto r Contro l of Inducti on M o to r w ithout Shaft Encoder.IEEE,I A S228,1992,(1):157~164
15 奥山 他1诱导电动机の速度1电压 べ 制御法1日本电学论D,1987,107(2)
16 山本 他1 速度制御方式1日本平元年电气学会全国大会11989,(1644)
17 竺伟,陈伯时1基于串联双模型观测器的异步电动机矢量控制器1电气传动,1997,27(3):9~11
18 余功军等1无速度传感器矢量控制系统的研究1电力电子技术,1999,(5):41~46
19 Schauder C.A dap tive Speed Identificati on fo r V ecto r Contro l of Inducti on M o to rs w ithout Ro tati onal T ransducers.Conf.
R ec.IEEE2I A S’89,1989:493~499
20 T am ai S,Sugi m o to H.Speed Senso r2less V ecto r Contro l of Inducti on M o to r w ith M odel R eference A dap tive System.
IEEE,I A S2231987:189~195
21 Dok i S et a l.I mp lem entati on of Speed Senso r2less F ield2o ri2 ented V ecto r Contro l U sing A dap tive Sliding O bserver.
Conf.R ec.IEEE2IECON’92,1992:453~458
22 Yang G.Ch in T H.A dap tive Speed Identificati on Schem e fo r V ecto r Contro lled Speed Senso r2less Inverter2inducti on M o to r D rive.IEEE,I A S2291993,(4):820~825
23 Kubo ta H,M atsusa K.Si m ultaneous E sti m ati on of Speed and Ro to r R esistance of O riented Inducti on M o to r w ithout Ro tati onal T ransducers.Conf.R ec.IEEE2PCC’93,1993:473~477
24 Kubo ta H,M atsusa K.Speed Senso rless F ield2o riented Con2 tro l of Inducti on M o to r w ith Ro to r R esistance A dap tati on.
IEEE,I A S230,1994,(5):1219~1224
25 Yang G.Ch in T H.H yper2stability of the Full2o rder O b2
server fo r V ecto r2contro lled Inducti on M o to r D rive w ithout Speed Senso r.IEE of Japan T rans.1992,1122D(11):945~953
26 Yong S H,Cho i J W.Senso r2less V ecto r Contro l of Induc2 ti on M ach ine U sing H igh F requency Current Injecti on.Conf.
R ec.IEEE2I A S’94,1994:503~508
27 Ferrah A,B radley K,A sher G M.Senso r2less Speed D etec2 ti on of Inverter Fed Inducti on M o to rs U sing Ro to r Slo t H ar2 monics and Fast Fourier T ransfo r m.Conf.R ec.IEEE2
I A S’92,1992:279~286
28 Si m oes M G.Bo se B K.N eural N etwo rk Based E sti m ati on of Feedback Signals fo r a V ecto r Contro lled Inducti on M o to r
D rive.IEE
E I A S231,1995,(3):620~629
29 K i m Y R,Sul S K,Park M H.Speed Senso r2less V ecto r Contro l of an Inducti on M o to rs U sing an Extended Kal m an
F ilter.Conf.R ec.IEEE2I A S’92,1992:594~599
30 O hyam a K,A sher G M,Sum https://www.doczj.com/doc/6c9478645.html,parative T esting of
H igh Perfo r m ance Senso r2less Inducti on M o to r D rives.
Conf.R ec.IPEC2Tokyo2000:1063~1068
31 L uo Y C et a l.A dap tive Stato r R esistance E sti m ati on and L ow Speed To rque R i pp leM ini m izati on fo r a Senso r2less D i2 rect To rque Contro l Inducti on M o to r D rive.Conf.R ec.
IPEC2Tokyo2000:1087~1092
32 B lasco2Gi m enez R et a l.D ynam ic Perfo r m ance L i m itati ons fo r M RA S based Senso r2less Inducti on M o to r D rives,Part 1:Stability A nalysis fo r the C lo sed L oop D rive.IEE P roc.B2 143,1996,(2):113~122
收稿日期:2000209226
修改稿日期:2000212220
22
传感器的主要参数特性 传感器的种类繁多,测量参数、用途各异.共性能参数也各不相同。一般产品给出的性能参数主要是静态特性利动态特性。所谓静态特性,是指被测量不随时间变化或变化缓慢情况下,传感器输出值与输入值之间的犬系.一般用数学表达式、特性曲线或表格来表示。动态特性足反映传感器随时间变化的响应特性。红外碳硫仪动恋特性好的传感器,其输出量随时间变化的曲线与被测量随时间变化的曲线相近。一般产品只给出响应时间。 传感器的主要特性参数有: (1)测量范围(量程) 量程是指在正常工种:条件下传感器能够测星的被测量的总范同,通常为上限值与F 限位之差。如某温度传感器的测员范围为零下50度到+300度之间。则该传感器的量程为350摄氏度。 (2)灵敏度 传感器的灵敏度是指佑感器在稳态时输出量的变化量与输入量的变化量的比值。通常/d久表示。对于线性传感器,传感器的校准且线的斜率就是只敏度,是一个常量。而非线性传感器的灵敏度则随输入星的不同而变化,在实际应用巾.非线性传感器的灵敏度都是指输入量在一定范围内的近似值。传感器的足敏度越高.俏号处理就越简单。 (3)线性度(非线性误差) 在稳态条件下,传感器的实际输入、输出持件曲线勺理想直线之日的不吻合程度,称为线性度或非线性误差,通常用实际特性曲线与邵想直线之司的最大偏关凸h m2与满量程输出仪2M之比的百分数来表示。该系统的线性度X为 (4)不重复性 z;重复性是指在相同条件下。传感器的输人员技同——方向作全量程多次重复测量,输出曲线的不一致程度。通常用红外碳硫仪3次测量输11j的线之间的最大偏差丛m x与满量程输出值ym之比的百分数表示,1、2、3分别表示3次所得到的输出曲线.它是传感器总误差中的——项。 (5)滞后(迟滞误差) 迟滞现象是传感器正向特性曲线(输入量增大)和反向特性曲线(输入量减小)的不重合程度,通常用yH表示。
第3章传感器基本特性 一、单项选择题 1、衡量传感器静态特性的指标不包括()。 A. 线性度 B. 灵敏度 C. 频域响应 D. 重复性 2、下列指标属于衡量传感器动态特性的评价指标的是()。 A. 时域响应 B. 线性度 C. 零点漂移 D. 灵敏度 3、一阶传感器输出达到稳态值的50%所需的时间是()。 A. 延迟时间 B. 上升时间 C. 峰值时间 D. 响应时间 4、一阶传感器输出达到稳态值的90%所需的时间是()。 A. 延迟时间 B. 上升时间 C. 峰值时间 D. 响应时间 5、传感器的下列指标全部属于静态特性的是() A.线性度、灵敏度、阻尼系数 B.幅频特性、相频特性、稳态误差 C.迟滞、重复性、漂移 D.精度、时间常数、重复性 6、传感器的下列指标全部属于动态特性的是() A.迟滞、灵敏度、阻尼系数 B.幅频特性、相频特性 C.重复性、漂移 D.精度、时间常数、重复性 7、不属于传感器静态特性指标的是() A.重复性 B.固有频率 C.灵敏度 D.漂移 8、对于传感器的动态特性,下面哪种说法不正确() A.变面积式的电容传感器可看作零阶系统 B.一阶传感器的截止频率是时间常数的倒数 C.时间常数越大,一阶传感器的频率响应越好 D.提高二阶传感器的固有频率,可减小动态误差和扩大频率响应范围9、属于传感器动态特性指标的是() A.重复性 B.固有频率 C.灵敏度 D.漂移
10、无论二阶系统的阻尼比如何变化,当它受到的激振力频率等于系统固有频率时,该系统的位移与激振力之间的相位差必为() A. 0° B.90° C.180° D. 在0°和90°之间反复变化的值 11、传感器的精度表征了给出值与( )相符合的程度。 A.估计值 B.被测值 C.相对值 D.理论值 12、传感器的静态特性,是指当传感器输入、输出不随( )变化时,其输出-输入的特性。 A.时间 B.被测量 C.环境 D.地理位置 13、非线性度是测量装置的输出和输入是否保持( )关系的一种度量。 A.相等 B.相似 C.理想比例 D.近似比例 14、回程误差表明的是在( )期间输出-输入特性曲线不重合的程度。 A.多次测量 B.同次测量 C.正反行程 D.不同测量 =秒的一阶系统,当受到突变温度作用后,传感器输15、已知某温度传感器为时间常数τ3 出指示温差的三分之一所需的时间为()秒 A.3 B.1 C. 1.2 D.1/3 二、多项选择题 1.阶跃输入时表征传感器动态特性的指标有哪些?() A.上升时间 B.响应时间 C.超调量 D.重复性 2.动态响应可以采取多种方法来描述,以下属于用来描述动态响应的方法是:() A.精度测试法 B.频率响应函数 C.传递函数 D.脉冲响应函数 3. 传感器静态特性包括许多因素,以下属于静态特性因素的有()。 A.迟滞 B.重复性 C.线性度 D.灵敏度 4. 传感器静态特性指标表征的重要指标有:() A.灵敏度 B.非线性度 C.回程误差 D.重复性 5.一般而言,传感器的线性度并不是很理想,这就要求使用一定的线性化方法,以下属于线性化方法的有:() A.端点线性 B.独立线性 C.自然样条插值 D.最小二乘线性 三、填空题 1、灵敏度是传感器在稳态下对的比值。 2、系统灵敏度越,就越容易受到外界干扰的影响,系统的稳定性就越。 3、是指传感器在输入量不变的情况下,输出量随时间变化的现象。 4、要实现不失真测量,检测系统的幅频特性应为,相频特性应为。
无速度传感器矢量控制技术的行业现状与展望 The Comprehensive Status Analysis and Future Development Tendency of Sensor-less Vector Control (SVC) Technology 1 引言 交流传动在高性能场合的应用始于矢量控制概念的引入,包括直接磁场定向与间接磁场定向控制。尽管这一概念早在60年代就已出现,并由Siemens 的Blaschke博士于1972年正式提出,但是真正应用还是在微电子技术发展的二十年后。矢量控制从基本原理上讲能够获得优异的动静态特性,但是对电机参数的敏感性却成为实际应用中必须解决的问题。驱动器通过启动前的自整定以及运行过程中的在线整定,适应电机参数变化,保持矢量控制的动静态性能,这些复杂的自适应控制算法都必须通过强大的信号处理器才能完成。 近年来随着半导体技术的发展及数字控制的普及,矢量控制的应用已经从高性能领域扩展至通用驱动及专用驱动场合,乃至家用电器。交流驱动器已在工业机器人、自动化出版设备、加工工具、传输设备、电梯、压缩机、轧钢、风机泵类、电动汽车、起重设备及其它领域中得到广泛应用。随着半导体技术的飞速发展,功率器件在不断优化,开关速度在提高而损耗在下降,功率模块的功率密度在不断增加;数字信号处理器的处理能力愈加强大,处理速度不断提升,交流驱动器完全有能力处理复杂的任务,实现复杂的观测、控制算法,现代交流传动的性能也因此达到前所未有的高度。以代表交流驱动控制最高水平的交流伺服为例,其需求随着新的生产技术与新型加工原料的出现而迅速增长。据相关统计,高性能交流伺服驱动器数量的年增长率超过12%。伺服驱动中应用最多的电机是异步电机及同步电机,额定功率从50W到200kW,位置环、速度环以及转矩环路的典型带宽分别为60Hz、200Hz 以及1000Hz。 交流电机驱动中的大部分问题应当说在当今的驱动器中已经得到解决,相关的成熟技术提供了被业界广泛接受的解决方案,并在许多领域中得到成功应用,因此从基本结构上来讲,交流驱动器的现有设计方案在未来的几年中不会有大的变化。现在,交流驱动器开发的一个重点是如何将驱动器与电机有机地结合在一起,开发出更低成本、高可靠性、高性能“驱动模块”。基于这一思路,为进一步减小成本、提高可靠性,开发人员在如何省去轴侧传感器以及电机相电流传感器进行了深入的研究,特别是高性能无速度传感器矢量控制(SVC)的实现吸引了各国研发人员的广泛关注,并已成为近年来驱动控制研究的热点。随着具有强大处理能力的数字信号处理器的推出,实现该控制方式所需要的高鲁棒性、自适应的参数估计以及非线性状态观测成为可能,新的无速度传感控制方案不断推出。Siemens、Yaskawa、Toshiba GE、Rockwell、Mistubishi、Fuji等知名公司纷纷推出自己的SVC控制产品(本文所指SVC均针对异步电机),控制特性也在不断提高。SVC目前已在印刷、印染、纺机、钢铁生产线、起重、电动汽车等领域中广泛应用,在高性能交流驱动中占有愈来愈重要的地位。 2 无速度传感器矢量控制的优势 概括来说,无速度传感器矢量控制可以获得接近闭环控制的性能,同时省去了速度传感器,具有较低的维护成本。与传统V/Hz控制比较,无速度传感器矢量控制可以获得改进的低速运行特性,变负载下的速度调节能力亦得到改善,同时还可获得高的起动转矩,这在高摩擦与惯性负载的起动中有明显的优势。正是由于这些驱动特性,该控制技术已逐渐成为通用恒转矩驱动应用的选择。事实上,基本上所有的AC驱动厂家都提供该控制模式。 Schneider公司的驱动市场经理Susan Bowler认为,该控制模式的吸引人之处在于利用最小的附加费用获得大大增强的性能,包括低速特性、转矩响应及定位能力等。由于其性能接近伺服驱动,公司在拓展需要更精确负载定位控制的场合。该公司的第三代Altivar无速度传感器驱动产品具有自调谐特性,确保驱动器在电机运行参数随时间发生变化的情况下
肖金凤 1971年1月 生,1994年毕业于湖南大学电气与信息工程学院电机专业,学士学位,2004年毕业于湖南大学电气与信息工程学院控制工程专业,硕士学位,讲师。主要研究方向为电机智能控制、工业过程控制及综合自动化。 异步电动机无速度传感 器矢量控制系统设计 * 肖金凤1 , 黄守道2 , 李劲松 1 (1.南华大学,湖南 衡阳 421001;2.湖南大学,湖南 长沙 410082) 摘要 文章提出一种基于模糊神经网络的模型参考自适应电机转速辨识方法,将其与SVP WM 调制技术控制的变频器系统结合起来,组成了一种基于DSP 的异步电机无速度传感器矢量控制系统。具体介绍了其结构及软硬件的设计。仿真结果表明此系统动态性能好,能准确跟踪电机转速的变化。 关键词 异步电动机 无速度传感器 SVP WM 矢量控制 数字信号处理器 Fiel d Oriented Control Syste m of Speed Sensorless Based on DSP X iao Jinfeng ,Huang Shoudao ,L i Jingsong (1.N anhua Un iversity ;2.H unan Un i v ersity ) Abstract :This paper presents a ne w m et h od of i n ducti o n m otor speed identifica -ti o n .It is the co m binati o n o f f u zzy neural net w ork (FNN )w ith m odel reference adap -ti v e syste m (MRAS).W e co m bi n e this m ethod w it h the i n verter contro lled by space vector pulse w idth m odu lati o n (SVP WM )to for m a field oriented con tro l syste m o f speed senso rless based on DSP . Its struct u re and soft w are and hardw are are ana -l y zed .The S i m u lation results sho w that the contro l syste m has better dyna m ic per -f o r m ance and can accurately track the variati o n of the m otor speed . K ey w ords :I nducti o n m oto r Speed sensorless SVP WM F ield oriented con -tro l (FOC) DSP *湖南省自然科学基金资助项目(编号:02JJ Y 2089) 1 引言 异步电动机的数学模型由电压方程、磁链方 程、转矩方程和运动方程组成,是一个高阶、非线性、强耦合的多变量系统。采用传统的控制策略对其进行控制时,动态控制效果较差。目前异步电动机控制研究工作正围绕几个方面展开:采用新型电力电子器件和脉宽调制控制技术;应用矢量控制技术及现代控制理论、智能控制技术;广泛应用数字控制系统及计算机技术;无速度传感器控制技术。本文以电机控制专用芯片 T M S320F240为核心,采用磁通、转速闭环的矢量控制策略,利用SVP WM 脉宽调制技术、无速度传感器及智能控制技术,设计了一电机控制系统。仿真结果表明该控制系统抗干扰能力强,动态性能好。 2 速度估计策略 模型参考自适应方法(MRAS)是应用较广的速度估计方法。本文设计的模型参考自适应速度估计系统为减少定子电阻的影响选择瞬时无功功率模型,同时为有效解决瞬时无功功率模型参考 40 异步电动机无速度传感器矢量控制系统设计《中小型电机》2005,32(2)
BLDC无位置传感器控制技术 2014.11.12 duguqiubai1234@https://www.doczj.com/doc/6c9478645.html, BLDC电机是一种结合了直流电机和交流电机优点的改进型电机。其转子采用永磁材料励磁,体积小、重量轻、结构简单、维护方便。BLDC电机又具有控制简便、高效节能等一系列优点,已广泛应用于仪表和家用电器等领域。 本文主要讨论高压BLDC风机无位置传感器起动和运行技术。 一、无位置传感器技术简介 BLDC电机最简单的控制方法是安装三个位置传感器,使用六步换相法控制。但传感器器会增大电机的体积和成本,另外传感器的位置精度影响电机的运行;特别对于极对数较多的电机,传感器偏差少许机械角度也可能引起电角度偏差很多。在某些恶劣环境下,如高温、潮湿、腐蚀性气体等环境,传感器易损坏,因而无法使用。 使用无位置传感器方式则可以克服上述缺点。 无传感器BLDC在性能上也存在一些不足: (1)难以实现重负载(例如额定转矩)起动。好在风机属于轻负载起动的情况。 (2)难以快速起动。例如很难实现1秒内从静止加速到全速。好在风机通常不要求很短时间内完成加速。 (3)无法实现全速范围内任意调速。有传感器BLDC能够实现0%~100%额定转速范围内的调速,而无传感器BLDC通常只能实现10%~100%额定转速范围内的调速。好在风机通常不要求10%额定转速以下运行。 经过以上分析,可以看出风机非常适合使用无位置传感器方式控制。 国内高压无位置传感器BLDC技术仍处于不成熟阶段。使用该技术的产品应以稳定可靠为主要要求,而不是以性能优越为主要要求。高压无传感器BLDC如果追求性能优越,则成本太高,技术难度过大。 风机类产品通常起动后连续工作时间较长,所以通常不要求快速起动,不也要求反复起停。
传感器动态特性的性能指标 在检测控制系统和科学实验中,需要对各种参数进行检测和控制,而要达到比较优良的控制性能,则必须要求传感器能够感测被测量的变化并且不失真地将其转换为相应的电量,这种要求主要取决于传感器的基本特性。传感器的基本特性主要分为静态特性和动态特性,下面介绍反映传感器动态特性的性能指标。 动态特性是指检测系统的输入为随时间变化的信号时,系统的输出与输入之间的关系。主要动态特性的性能指标有时域单位阶跃响应性能指标和频域频率特性性能指标。传感器的输入信号是随时间变化的动态信号,这时就要求传感器能时刻精确地跟踪输入信号,按照输入信号的变化规律输出信号。当传感器输入信号的变化缓慢时,是容易跟踪的,但随着输入信号的变化加快,传感器随动跟踪性能会逐渐下降。输入信号变化时,引起输出信号也随时间变化,这个过程称为响应。动态特性就是指传感器对于随时间变化的输入信号的响应特性,通常要求传感器不仅能精确地显示被测量的大小,而且还能复现被测量随时间变化的规律,这也是传感器的重要特性之一。 传感器的动态特性与其输入信号的变化形式密切相关,在研究传感器动态特性时,通常是根据不同输入信号的变化规律来考察传感器响应的。实际传感器输入信号随时间变化的形式可能是多种多样的,最常见、最典型的输入信号是阶跃信号和正弦信号。这两种信号在物理上较容易实现,而且也便于求解。 对于阶跃输入信号,传感器的响应称为阶跃响应或瞬态响应,它是指传感器在瞬变的非周期信号作用下的响应特性。这对传感器来说是一种最严峻的状态,如传感器能复现这种信号,那么就能很容易地复现其他种类的输入信号,其动态性能指标也必定会令人满意。 而对于正弦输入信号,则称为频率响应或稳态响应。它是指传感器在振幅稳定不变的正弦信号作用下的响应特性。稳态响应的重要性,在于工程上所遇到的各种非电信号的变化曲线都可以展开成傅里叶(Fourier)级数或进行傅里叶变换,即可以用一系列正弦曲线的叠加来表
课程设计任务书 学生姓名:专业班级: 指导教师:工作单位:武汉理工大学 题目: 无速度传感器的矢量控制系统仿真 初始条件: 电机参数为:额定电压U=380V、频率50 =、定子电阻s R=0.252Ω、 f Hz 额定功率P=2.2KW、定子自感 L=0.0016H、转子电阻r R=0.332Ω、额定转速 s n=1420rpm、转子自感r L=0.0016H、级对数p n=2、互感m L=0.08H、转动惯量J=0.6Kgm2 要求完成的主要任务: (1)设计系统原理图; (2)用MATLAB设计系统仿真模型; (3)能够正常运行得到仿真结果,包括转速、转矩等曲线,并将推算转速与实际转速进行比较 参考文献: [1] 洪乃刚.《电力电子和电力拖动控制系统的MATLAB仿真》.北京:机械 工业出版社,2005:212-215 时间安排: 2011年12月5日至2011年12月14日,历时一周半,具体进度安排见下表 具体时间设计内容 12.5 指导老师就课程设计内容、设计要求、进度安排、评分标准等做具体介 绍;学生确定选题,明确设计要求 12.6-12.9 开始查阅资料,完成方案的初步设计 12.10—12.11 由指导老师审核设计方案,学生修改、完善并对其进行分析 12.12-12.13 撰写课程设计说明书 12.14 上交课程设计说明书,并进行答辩 指导教师签名:年月日 系主任(或责任教师)签名:年月日
摘要 异步电动机具有非线性、强耦合、多变量的性质,要获得高动态调速性能,必须从动态模型出发,分析异步电动机的转矩和磁链控制规律,研究高性能异步电机的调速方案。矢量控制是目前交流电动机较先进的一种动态模型,它又有基于转差频率控制的、无速度传感器和有速度传感器等多种矢量控制方式。无速度传感器控制的高性能通用变频器是当前全世界自动化技术和节能应用中受到普遍关心的产品和开发课题。本文介绍无速度传感器的矢量控制系统的原理和Matlab仿真。 关键词:矢量控制、无速度传感器、Matlab
龙源期刊网 https://www.doczj.com/doc/6c9478645.html, 浅谈交流电机无速度传感器控制策略 作者:吴宏宇吴兴宇史运涛 来源:《科技风》2016年第24期 摘要:目前,随着工业自动化的不断发展,交流电机将会被广泛使用。同时由于无速度 传感器技术具有低成本与高可靠性等优点,所以发展交流电机无速度传感器技术,对于提高科技生产力以及工业自动化具有极其重要的意义。本文将简要介绍高性能无速度传感器交流电机控制策略,一种是异步电机与速度自适应全阶观测器相结合,另一种永磁同步电机与滑模观测器相结合的控制方法,旨在进一步促进高性能无速度传感器交流电机控制策略的发展。 关键词:交流电机;无速度传感器;全阶观测器;滑模观测器 随着电力电子技术、微电子技术、现代电机控制理论的迅速发展,交流电机获得快速的推广与应用[ 1 ]。目前,在高性能交流电机控制领域中矢量控制[ 2 ]已经被广泛应用。在实际应用中,为了进一步提高交流电机在不同环境下运行的可靠性,交流电机无速度传感器控制技术被提出。无速度传感器控制方法主要分为两大类,一种为外部信号注入,这种方法只适应于极低速的工况运行,同时额外的信号注入会带来高损耗、噪声等问题。另一种为基于交流电机模型的方法,如:模型参考自适应[ 3 ]、卡尔曼滤波[ 4 ]、滑模观测器[ 5 ]、自适应全阶观测器[ 6 ]等方法,这些方法具有很高的控制精度以及鲁棒性。 本文将重点介绍自适应全阶观测器、滑模观测器与矢量控制在交流电机无速度传感器技术中的应用。 1 速度自适应全阶观测器 对于异步电机来说,定子磁链和电磁转矩通常无法直接得到,一般是采用实时测量的电压电流信息和电机参数,并根据电机数学模型构造观测器来对内部的状态变量进行估计。全阶观测器在较宽范围内都有很高的观测精度[ 7 ],通过引入速度自适应环节后可以在观测定子磁链的同时估计电机转速,实现无速度传感器控制。 在全阶观测器的设计中,反馈增益矩阵与自适应率系数的设计直接关系到系统的稳定性、鲁棒性以及收敛速度[ 7 ]。为了保证系统的稳定性与收敛性,本文将介绍一种采用极点左移的方法来设计增益矩阵并对其进行简化,最终得到一个常数增益矩阵。引入速度自适应环节,可以利用李雅普诺夫函数推导出转速估计的自适应率[ 7 ],在实际应用中为了保证估计转速的收敛速度一般采用PI调节器来代替纯积分环节。 2 滑模观测器 在无速度传感器永磁同步电机控制策略中,滑模观测器被广泛应用,因为其具有结构简单、鲁棒性强以及快速的动态响应[ 8 ]。滑模观测器的主要思想是通过选取滑模面与滑模增益
交流感应电动机无速度传感器的 高动态性能控制方法综述 清华大学 杨耕 上海大学 陈伯时 摘要:文章分析了交流感应电机无速度传感器的高动态性能控制方案的控制要点。在介绍国内外产业界已实用化的、以及正在研发中的几种代表性的控制策略的同时,讨论了各种方法理论要点和实际应用中的特点。最后,介绍了当前的几个研究热点问题并就发展方向提出了一点设想。 关键词:异步电动机控制 无速度传感器 转矩控制 磁链观测 速度辨识 Rev iew the M ethods for the Speed Sen sor-less Con trol of I nduction M otor Yang Geng Chen Bo sh i Abstract:T h is paper analyzes theo retical po ints of the i m p lem entati on fo r h igh perfo r m ance contro l of in2 ducti on mo to r w ithout speed senso r.A fter that,typ ical app roaches of the contro l strategy,w h ich are used in p ractical p roducts o r are being developed recently,are p resented and the characteristic of each app roach is dis2 cussed.F inally,som e unso lved p roblem s being researched as w ell as the develop ing po tentials are introduced. Keywords:contro l of inducti on mo to r speed senso r2less to rque contro l flux observer speed identifica2 ti on 1 前言 交流感应电机的无速度传感器高动态性能控制,是为了实现与有速度传感器的矢量控制(或直接转矩控制)相当的转矩和速度性能的方案,被用于无法设置速度传感器的设备或新一代高性能通用变频器之中[1,2]。相关的理论与技术也成为近10年来交流传动领域的热门研发内容之一。 本文主要综述在无速度传感器的前提下,具有速度反馈控制环的矢量控制方案(V C)和直接转矩控制方案(D TC),而不讨论诸如“V F控制+为补偿负载变动的滑差补偿”等只考虑静态的方法。本文在介绍各种方法的同时,综述其理论要点和实际应用中的特点、介绍所应用的厂家,从中总结出实现高动态性能控制的要点及主要成果。最后,介绍当前几个研究热点问题。 2 控制方法 211 方法分类的出发点 一般地,由转矩控制环及速度控制环构成的无速度传感器矢量控制(或直接转矩控制)系统由图1所示的3个环节构成。即:①速度调节器;②磁链和转矩控制器;③速度推算或辨识器(含磁链计算或观测) 。 图1 无速度传感器控制系统构成 对于环节②,需要控制转矩和磁链。由此可以分为:a以转子磁链定向控制为基础的矢量控制策略。目前常用的有计算滑差频率的被称为间接法(I V C)和把状态观测器观测到的转子磁链进行反馈控制的直接法(DV C)。b以控制定子磁链为特点的,被称之为直接转矩控制策略(D TC)。 环节③的结构依存于环节②的结构。实际上在计算或推定速度值时,常常也要获得(计算或观测)磁链(转子的或是定子的)值。因此,按其理论上的特点,可以把获得转速和磁链的方法大致分 3 电气传动 2001年 第3期
无速度传感器 在高性能的异步电机矢量控制系统中,转速的闭环控制环节一般是必不可少的。通常,采用光电码盘等速度传感器来进行转速检测,并反馈转速信号。但是,由于速度传感器的安装给系统带来一些缺陷:系统的成本大大增加;精度越高的码盘价格也越贵;码盘在电机轴上的安装存在同心度的问题,安装不当将影响测速的精度;电机轴上的体积增大,而且给电机的维护带来一定困难,同时破坏了异步电机的简单坚固的特点;在恶劣的环境下,码盘工作的精度易受环境的影响。因此,越来越多的学者将眼光投向无速度传感器控制系统的研究。国外在20世纪70年代就开始了这方面的研究,但首次将无速度传感器应用于矢量控制是在1983年由R.Joetten完成,这使得交流传动技术的发展又上了一个新台阶,但对无速度传感器矢量控制系统的研究仍在继续。 2无速度传感器的控制方法 在近20年来,各国学者致力于无速度传感器控制系统的研究,无速度传感器控制技术的发展始于常规带速度传感器的传动控制系统,解决问题的出发点是利用检测的定子电压、电流等容易检测到的物理量进行速度估计以取代速度传感器。重要的方面是如何准确地获取转速的信息,且保持较高的控制精度,满足实时控制的要求。无速度传感器的控制系统无需检测硬件,免去了速度传感器带来的种种麻烦,提高了系统的可靠性,降低了系统的成本;另一方面,使得系统的体积小、重量轻,而且减少了电机与控制器的连线,使得采用无速度传感器的异步电机的调速系统在工程中的应用更加广泛。国内外学者提出了许多方法。 (1)动态速度估计法主要包括转子磁通估计和转子反电势估计。都是以电机模型为基础,这种方法算法简单、直观性强。由于缺少无误差校正环节,抗干扰的能力差,对电机的参数变化敏感,在实际实现时,加上参数辨识和误差校正环节来提高系统抗参数变化和抗干扰的鲁棒性,才能使系统获得良好的控制效果。 (2)PI自适应控制器法其基本思想是利用某些量的误差项,通过PI自适应控制器获得转速的信息,一种采用的是转矩电流的误差项;另一种采用了转子q轴磁通的误差项。此方法利用了自适应思想,是一种算法结构简单、效果良好的速度估计方法。 (3)模型参考自适应法(MRAS)将不含转速的方程作为参考模型,将含有转速的模型作为可调模型,2个模型具有相同物理意义的输出量,利用2个模型输出量的误差构成合适的自适应律实时调节可调模型的参数(转速),以达到控制对象的输出跟踪参考模型的目的。根据模型的输出量的不同,可分为转子磁通估计法、反电势估计法和无功功率法。转子磁通法由于采用电压模型法为参考模型,引入了纯积分,低速时转子磁通估计法的改进,前者去掉了纯积分环节,改善了估计性能,但是定子电阻的影响依然存在;后者消去了定子电阻的影响,获得了更好的低速性能和更强的鲁棒性。总的说来,MRAS是基于稳定性设计的参数辨识方法,保证了参数估计的渐进收敛性。但是由于MRAS的速度观测是以参考模型准确为基础的,参考模型本身的参数准确程度就直接影响到速度辨识和控制系统的成效。 (4)扩展卡尔曼滤波器法将电机的转速看作一个状态变量,考虑电机的五阶非线性模型,采用扩展卡尔曼滤波器法在每一估计点将模型线性化来估计转速,这种方法
无刷直流电机无位置传感器控制方法综述所谓的无位置传感器控制,正确的理解应该是无机械的位置传感器控制。在电机运转的过程中,作为逆变桥功率器件换向导通时序的转子位置信号仍然是需要的,只不过这种信号不再由位置传感器来提供,而应该由新的位置信号检测措施来代替,即以提高电路和控制的复杂性来降低电机的复杂性。所以,目前永磁无刷直流电机无位置传感器控制研究的核心和关键就是架构一转子位置信号检测线路,从软硬件两个方面来间接获得可靠的转子位置信号,借以触发导通相应的功率器件,驱动电机运转。 1.反电势过零点法(端电压法):基于反电动势过零点的转子位置检测方法是 在忽略永磁无刷直流电机电枢反应影响的前提下。通过检测断开相反电动势过零点。依次得到转子的六个关键位置信号。但是存在如下缺点:反电动势正比于转速,低速时不能通过检测端电压来获得换相信息故这种方法严重影响了电机的调速范围。使电机起动困难;续流二极管导通引起的电压脉冲可能覆盖反电动势信号。尤其是在高速、重载、或者绕组电气时间常数很大等情况下,续流二极管导通角度很大,可能使得反电动势法无法检测。 反电势过零检测法的改进策略:针对以上缺点,利用神经网络的非线性任意逼近特性, 提出一种基于神经元网络的电机相位补偿控制。首先由硬件电路获得有效的反电动势信息, 再利用BP 神经网络进行正确相位补偿, 实现无刷直流电机的无位置传感器控制, 获得了较好的效果[1]。还有一种采用人工神经元网络的永磁无刷直流电机反电势预测新方法, 采用神经元网络方法对永磁无刷直流电动机反电势波形准确预测的结果进一步用于电机动、静态特性的仿真或预测, 这将比假设电机反电势波形为理想正弦波或梯形波所进行的仿真更接近电机的实际运行结果。较之传统的路和场的计算方法, 达到了快速性和准确性的统一, 且由于神经元网络的自学习神经元网络成功训练后, 就可以用以预测所研究类型的永磁无刷直流电机的反电势波形[2]。 直接检测法,通过比较逆变器直流环中点电压和电机断开相绕组端电压的关
无位置传感器控制技术是无刷直流电机研究的热点之一,国内外相关研究已经取得阶段性成果。 在无刷直流电机工作过程中,各相绕组轮流交替导通,绕组表现为断续通电。在绕组不通电时,由于绕组线圈的蓄能释放,会产生感应电动势,该感应电动势的波形在绕组两端有可能被检测出来。利用感应电动势的一些特点,可有取代转子上的位置传感器功能,来得到需要的换相信息。由此,就出现了无位置传感器的无刷直流电动机。 尽管无位置传感器控制方式使得转子位置检测的精确度有所降低,但由于取消了位置传感器,电机的结构更加简单,安装更加方便,成本降低,可靠性进一步提高,在对体积和可靠性有要求的领域以及不适合安装位置传感器的场合,无位置传感器无刷直流电机应用广泛。 无位置传感器控制方式下的无刷直流电机具有可靠性高、抗干扰能力强等优点,同时在一定程度上克服了位置传感器安装不准确引起的换相转矩波动。 无位置传感器技术是从控制的硬件和软件两方面着手,以增加控制的复杂性换取电机结构复杂性的降低。 以采用120o电角度两两导通换相方式的三相桥式Y接无刷直流电机为例,讨论基于现代控制理论和智能算法的无刷直流电机无位置传感器控制方法。 转子位置间接检测法 目前无刷直流电机中主要采用电磁式、光电式、磁敏式等多种形式的位置传感器,但位置传感器的存在限制了无刷直流电机在某些特定场合的应用,主要体现在: 1、位置传感器可使电机系统的体积增大; 2、位置传感器使电机与控制系统之间导线增多,使系统易受外界干扰影响; 3、位置传感器在高温、高压和湿度较大等恶劣工况下运行时灵敏度变差,系统运行 可靠性降低 4、位置传感器对安装精度要求较高,机械安装偏差引起的换相不准确直接影响电机 的运行性能。 无位置传感器控制技术越来越受到重视,并得到了迅速发展。依据检测原理的不同,无刷直流电机无位置传感器控制方法主要包括反电势法、磁链法、电感法及人工智能法等。 反电势法 反电势法(感应电动势过零点检测法)目前是技术最成熟、应用最广泛的一种位置检测方法。该方法将检测获得的反电势过零点信号延迟30o电角度,得到6个离散的转子位 置信号,为逻辑开关电路提供正确的换相信息,进而实现无刷直流电机的无位置传感器控制。 无刷直流电机反电势过零点与换相时刻的对应关系如图所示,图中e A、e B、e C为相位互差120o电角度的三相梯形波反电势,Q1~Q6为一个周期内的6个换相点,分别滞后相应反电势过零点30o电角度。
传感器静态特性的一般知识 传感器作为感受被测量信息的器件,总是希望它能按照一定的规律输出有用信号,因此需要研究其输出――输入的关系及特性,以便用理论指导其设计、制造、校准与使用。理论和技术上表征输出――输入之间的关系通常是以建立数学模型来体现,这也是研究科学问题的基本出发点。由于传感器可能用来检测静态量(即输入量是不随时间变化的常量)、准静态量或动态量(即输入量是随时间而变化的量),理论上应该用带随机变量的非线性微分方程作为数学模型,但这将在数学上造成困难。由于输入信号的状态不同,传感器所表现出来的输出特性也不同,所以实际上,传感器的静、动态特性可以分开来研究。因此,对应于不同性质的输入信号,传感器的数学模型常有动态与静态之分。由于不同性质的传感器有不同的在参数关系(即有不同的数学模型),它们的静、动态特性也表现出不同的特点。在理论上,为了研究各种传感器的共性,本节根据数学理论提出传感器的静、动态两个数学模型的一般式,然后,根据各种传感器的不同特性再作以具体条件的简化后给予分别讨论。应该指出的是,一个高性能的传感器必须具备有良好的静态和动态特性,这样才能完成无失真的转换。 1. 传感器静态特性的方程表示方法 静态数学模型是指在静态信号作用下(即输入量对时间t 的各阶导数等于零)得到的数学模型。传感器的静态特性是指传感器在静态工作条件下的输入输出特性。所谓静态工作条件是指传感器的输入量恒定或缓慢变化而输出量也达到相应的稳定值的工作状态,这时,输出量为输入量的确定函数。若在不考虑滞后、蠕变的条件下,或者传感器虽然有迟滞及蠕变等但仅考虑其理想的平均特性时,传感器的静态模型的一般式在数学理论上可用n 次方代数方程式来表示,即 2n 012n y a a x a x a x =+++?+ (1-2) 式中 x ――为传感器的输入量,即被测量; y ――为传感器的输出量,即测量值; 0a ――为零位输出; 1a ――为传感器线性灵敏度; 2a ,3a ,…,n a ――为非线性项的待定常数。 0a ,1a ,2a ,3a ,…,n a ――决定了特性曲线的形状和位置,一般通过传感器的校 准试验数据经曲线拟合求出,它们可正可负。
一、传感器地特性 ()传感器地动态性.动特性是指传感器对随时间变化地输入量地响应特性.动态特性输入 信号变化时,输出信号随时间变化而相应地变化,这个过程称为响应.传感器地动态特性是 指传感器对随时间变化地输入量地响应特性.动态特性好地传感器,当输入信号是随时间变 化地动态信号时,传感器能及时精确地跟踪输入信号,按照输入信号地变化规律输出信号. 当传感器输入信号地变化缓慢时,是容易跟踪地,但随着输入信号地变化加快,传感器地及时跟踪性能会逐渐下降.通常要求传感器不仅能精确地显示被测量地大小,而且还能复现被测量随时间变化地规律,这也是传感器地重要特性之一.文档来自于网络搜索 ()传感器地线性度.通常情况下,传感器地实际静态特性输出是条曲线而非直线.在实际 工作中,为使仪表具有均匀刻度地读数,常用一条拟合直线近似地代表实际地特性曲线、线性度(非线性误差)就是这个近似程度地一个性能指标.拟合直线地选取有多种方法.如将零输 入和满量程输出点相连地理论直线作为拟合直线;或将与特性曲线上各点偏差地平方和为最小地理论直线作为拟合直线,此拟合直线称为最小二乘法拟合直线.文档来自于网络搜索 ()传感器地灵敏度.灵敏度是指传感器在稳态工作情况下输出量变化△ 对输入量变化△ 地比值.它是输出一输入特性曲线地斜率.如果传感器地输出和输入之间显线性关系,则灵敏度是一个常数.否则,它将随输入量地变化而变化.灵敏度地量纲是输出、输入量地量纲之比.例如,某位移传感器,在位移变化时,输出电压变化为,则其灵敏度应表示为.当传感器地输 出、输入量地量纲相同时,灵敏度可理解为放大倍数.文档来自于网络搜索 ()传感器地稳定性.稳定性表示传感器在一个较长地时间内保持其性能参数地能力.理想地情况是不论什么时候,传感器地特性参数都不随时间变化.但实际上,随着时间地推移, 大多数传感器地特性会发生改变.这是因为敏感器件或构成传感器地部件,其特性会随时间发生变化,从而影响传感器地稳定性.文档来自于网络搜索 ()传感器地分辨力.分辨力是指传感器可能感受到地被测量地最小变化地能力.也就是说,如果输入量从某一非零值缓慢地变化.当输入变化值未超过某一数值时,传感器地输出 不会发生变化,即传感器对此输入量地变化是分辨不出来地.只有当输入量地变化超过分辨 力时,其输出才会发生变化.通常传感器在满量程范围内各点地分辨力并不相同,因此常用满量程中能使输出量产生阶跃变化地输入量中地最大变化值作为衡量分辨力地指标.上述指 标若用满量程地百分比表示,则称为分辨率.文档来自于网络搜索 ()传感器地迟滞性.迟滞特性表征传感器在正向(输入量增大)和反向(输入量减小)行程间输出输入特性曲线不一致地程度,通常用这两条曲线之间地最大差值△与满量程输出地百 分比表示.迟滞可由传感器内部元件存在能量地吸收造成.文档来自于网络搜索 ()传感器地重复性.重复性是指传感器在输入量按同一方向作全量程连续多次变动时所得特性曲线不一致地程度.各条特性曲线越靠近,说明重复性越好,随机误差就越小.如图所 示为输出特性曲线地重复特性,正行程地最大重复性偏差为.反行程地最大重复性偏差为.取 这两个最大偏差中地较大者为,再以其占满量程输出地百分数表示,就是重复误差,即一士X ()重复性是反映传感器精密程度地重要指标.同时,重复性地好坏也与许多随机因素有关,它 属于随机误差,要用统计规律来确定.文档来自于网络搜索 二、常见地传感器种类 .电阻式传感器电阻式传感器是将被测量,如位移、形变、力、加速度、湿度、温度等这些物理量转换式成电阻值这样地一种器件.主要有电阻应变式、压阻式、热电阻、热敏、气敏、湿敏等电阻式传感器件.文档来自于网络搜索 .变频功率传感器 变频功率传感器通过对输入地电压、电流信号进行交流采样,再将采样值通过电缆、光
1、PG卡是变频器控制带编码器电机时的选件.构成闭环控制.主要是实现高精度的带编码器(PG)矢量闭环控制.PG卡和带编码器的电机是变频器实现最高的控制精度的方式.可实现电机速度控制和位置控制(定位). 2、变频器的无PG矢量控制怎么接线? 无PG矢量控制接线与其它的变频器一样接线。(与PG矢量控制区别就是没有电机编码器的接线了。) 主要是控制方式选择PG矢量控制,并且要进行电机的自学习,以供变频器采集电机的必要参数。 3、变频器中说的有PG矢量控制中的PG指的是什么啊? PG:pulse Quantizer 就是脉冲编码器 有PG矢量控制,就是有编码器的矢量控制,也就是闭环矢量控制 4、变频器的VF控制和无PG 矢量控制什么区别怎么使用 区别在于无PG反馈矢量控制机械硬度较好,控制精度和调速范围更好些,但要求较多.V/F控制适用于大多数控制. 5、无PG矢量控制一般用在什么样的负载上呢?速度和转矩与VF控制有什么区别 回答 无PG反馈的矢量变频器通过变频器内部的检测电流测出三相输出电压和电流值矢量,通过变换电路得到两个相互垂直的电流信号,再用这两个信号通过运算调节器控制逆变电路的输出。整个过程全部在变频器内完成,工程上称为无PG反馈的矢量变频器。3.变频器矢量控制功能的设置只设置“用”或“不用”即可。4.设置矢量控制功能时应符合的条件(1) 变频器只能连接一台电动机;(2) 电动机应使用变频器厂家的原配电动机,若不是原配电动机,应先进行自整定操作;(3) 所配备电动机的容量比应配备电动机的容量最多小一个等级; (4) 变频器与电动机之间的电缆长度应不大于50m。(5) 变频器与电动机之间接有电抗器时,应使用变频器的自整定功能改写数据。 在需要较高精度的控制场合下,可选用无PG反馈的控制,比如数控车床:作为主轴电动机的驱动系统,可以根据切削需要改变主轴的转速,随着工件直径的变化,主轴转速亦随着变化,保持刀具的恒线速切削。还可以由数控系统控制主轴运行、停止,正、反转以及与进刀系统保持严格的传动比关系,完成工件的自动加工,从而大大提高工作效率和工件的成品率。一般可选用普通U∕f控制变频器,为了提高控制精度选用矢量控制变频器效果更好。 V/F控制方式在低速下输出机械转矩有所下降(如需要可设置转矩补偿,升高输出电压),后者低速高速转矩都一样;在转速方面都是一样的,只是对V/F控制来说,当负载转矩波动时会出现转速的变化.
无速度传感器说明: 在现代交流调速系统中,为了获得高性能的转速控制,采用了速度闭环控制,必须在电机轴上安装速度传感器。但在实际系统中,速度传感器的安装往往受到一些限制,主要存在以下几个问题[3,4]: 1) 速度传感器的安装降低了系统的鲁棒性和简单性; 2) 高精度的速度传感器价格一般比较贵,增加了系统成本; 3) 在一些恶劣的条件下(如高温、潮湿等),速度传感器的安装会降低系统 的可靠性; 4) 速度传感器的安装存在一些困难,如果安装不当会成为系统的一个故障 源。 为了避免这些问题,使得人们转而研究无需速度传感器的电机转速辨识方法。近年来,这项研究也成为交流传动的一个热点问题。国外在20世纪70年代开始了这方面的研究。而首次将无速度传感器应用于矢量控制是在1983年由R.Joetten 完成的,这使得交流传动技术的发展又上了一个新的台阶。在其后的十几年中,国内外的学者在这方面做了大量的工作,到目前为止,提出了许多种方法,大体上可以分为:①动态转速估计器;②模型参考自适应(MRAS );③基于PI 调节器法;④自适应转速观测器;⑤转子齿谐波法;⑥高频注入法;⑦基于人工神经元网络的方法。 以下分别讨论动态转速估计器,模型参考自适应(MRAS ),基于PI 调节器法,滑模变结构观测器,在第二章建立的异步电机矢量控制仿真实验平台上仿真。 动态转速估计器[3] 这种方法从电机的电磁关系式,转速的定义中得到关于转差的表达式。电机角速度等于同步角速度s ω与转差角速度sl ω之差。 s sl ωωω=- (3-1) 同步角速度可以由静止坐标系下的定子电压方程式推得,由图3-1矢量关系可知 2 2 s s s s s s s s s s d d arctg dt dt p p βαβααβ αβ ωθψ? ?==?? ψ?? ψψ-ψψ= ψ+ψ (3-2)