航天器的姿态与轨道最优控制
董丽娜唐晓华吴朝俊司渭滨(第八小组)
(西安交通大学电气工程学院,陕西省,西安市 710049)
【摘要】从航天器的轨道运动学方程出发, 运用线性离散系统最优控制理论, 提出了一种用于航天器轨道维持与轨道机动的最优控制方法, 建立了相关的最优控制模型并给出了求解该模型的算法。仿真计算结果表明, 本文提出的最优控制方法是正确和可行的。
【关键词】航天器轨道保持轨道机动最佳控制
Optimal Control of Spacecraft State and Orbit
Dong LiNa,Tang XiaoHua,Wu ChaoJun,Si WeiBin
(EE School of Xi’an Jiaotong university,Xi’an, Shannxi province, 710049)【Abstract】This paper provides a new optimal control method for orbital maintenance and maneuver ,which begins with the kinetics equation of spacecraft and is based on the linear discrete optimal control theory , establishes the relative optimal control model and gives its solution. The simulation results show that the given optimal control method in this paper is correct and feasible. 【Key word】Spacecraft ,Orbital keeping ,Orbital maneuver ,Optimal control
1 引言
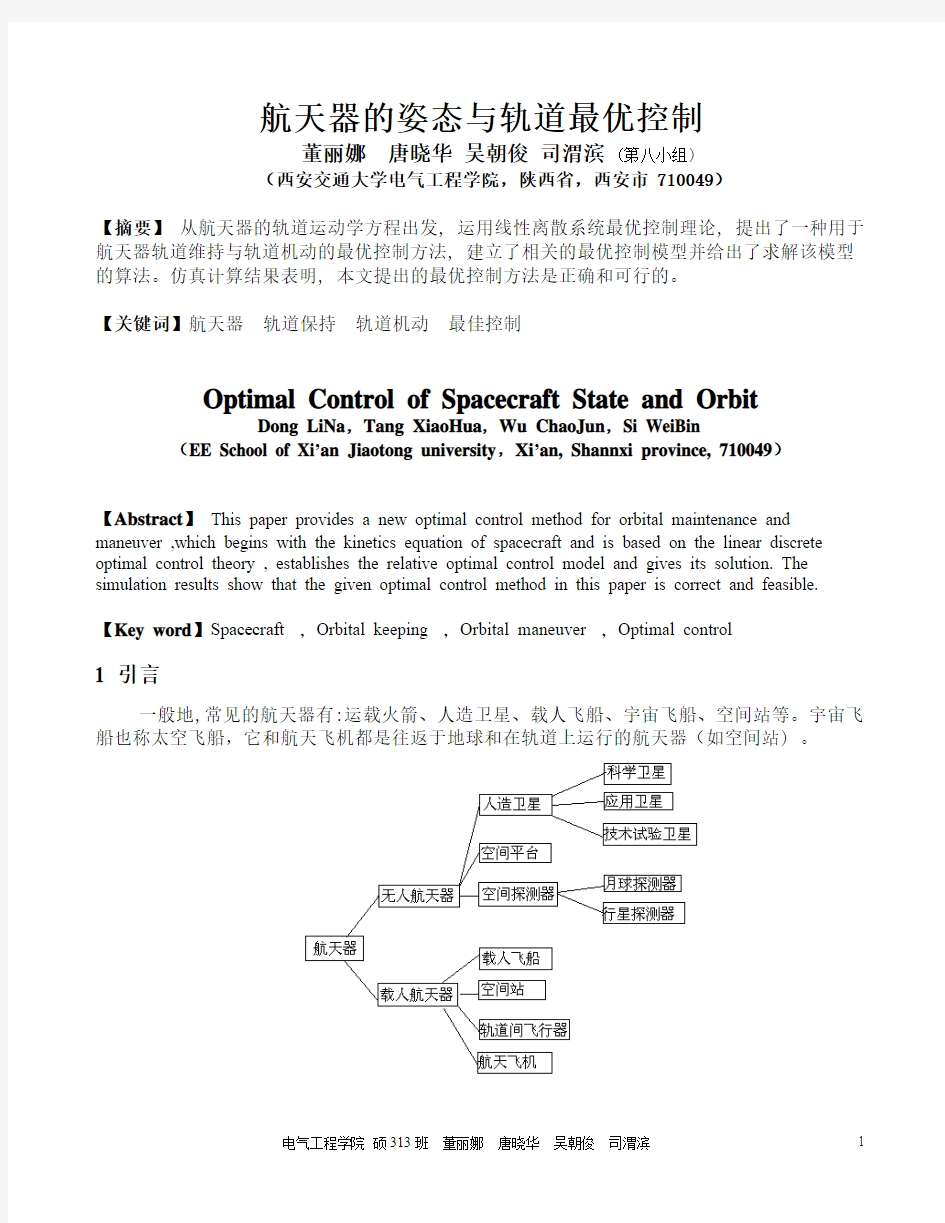
一般地,常见的航天器有:运载火箭、人造卫星、载人飞船、宇宙飞船、空间站等。宇宙飞船也称太空飞船,它和航天飞机都是往返于地球和在轨道上运行的航天器(如空间站) 。
对于无人航天器由一下几部分组成:
(1)有效载荷 (2)结构 (3)动力系统
(4)温度控制系统 (5)姿态和轨道控制 (6)电源系统和遥测、遥控、跟踪系统星载部分
其中姿态和轨道控制是航天器运行过程中比较重要的技术。包括被动式和主动式。
(1)被动式:利用航天器本身的动力特性和自然环境力矩来控制姿态。
a. 不需消耗航天器上的能源
b. 结构简单,适用于较长寿命的航天器
c. 控制精度不高,常用的有自旋稳定,重力梯度稳定,磁稳定等。
(2)主动式:当控制器送来信号后则启动执行机构,控制卫星姿态的执行机构。
a.以喷气三轴控制(卫星上装有轴向,横向和切向喷嘴)
b.以飞轮为主的三轴控制(即角动量控制)
姿态和轨道控制必要性:
(1)卫星进入轨道后,长时间的运行过程中会遇到各种干扰,即使极稀薄的空气也会形成空气阻力,阻力虽然很小但长久的作用也会使卫星速度变慢,偏离预定的轨道。
(2)卫星的天线和观察设备要卫星有一定的指向,当偏离后就需要调整它的姿态。
(3)返回式卫星在轨工作完成后,也要调整卫星姿态。使其发动机喷口对准预定方向,点火产生推力,使卫星进入轨道,然后返回地面。
由此可见,航天器轨道维持和轨道机动是轨道力学研究的重要问题。工程实践中,轨道维持通常是按轨道平面维持和轨道形状维持等多个方面分别进行的,这不但繁琐而且不易实现燃料消耗的最小化。怎样才能以最小的能耗实现航天器的轨道维持呢?对于已偏离其标称轨道(由于入轨误差和空间各种扰动因素的影响)、同时又肩负着变轨使命的在轨航天器而言,又该如何调整预先设定好的各变轨点速度脉冲,最终以最小的能耗代价飞抵原定目标轨道或临时变更的新目标轨道呢?针对这些问题,本文运用线性离散系统最优控制理论对轨道维持与机动问题进行了研究,提出了轨道维持与机动的最优控制模型及其求解算法。该模型的提出,从最优控制的角度出发对轨道维持与机动问题展开研究。
2 最优控制模型的建立与求解
设计目的:当航天器在运行工作中,其中某一动量飞轮发生故障或失效,航天器能保持有效的姿态控制和任意的定位。
设计要求:利用最优控制方法提出求解带有2个动量飞轮航天器的姿态控制算法,通过数值仿真,表明该方法对航天器姿态控制是有效的
分析思路:本课题考虑航天器在2个动量飞轮作用下,当系统角动量为0时,将航天器系统的姿态控制问题转化为无漂移系统的运动规划问题,利用最优控制方法确定动量飞轮控制输入规律,以达到航天器主体的期望姿态。
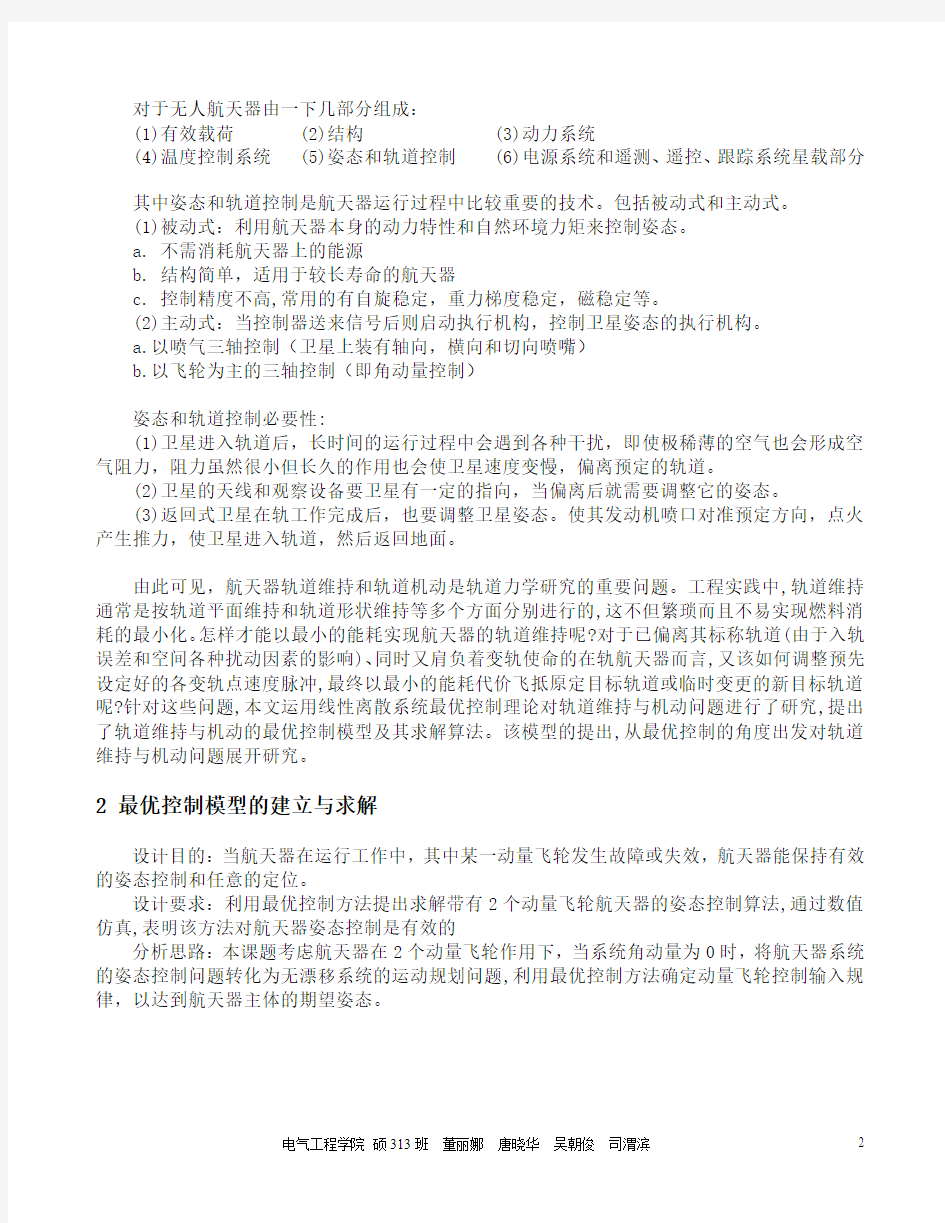
2.1 系统建模
如图1所示以系统质点O 为原点建立相对惯性空间平动的坐标系。i ρ分别是i O 到系统总质心O 的矢径
图1 2动量飞轮航天器系统
两个飞轮相对系统总质心的位置:
其中:
又由牛顿定律,航天器系统相对O点的动量矩可表示为:
当航天器系统起始动量矩H为零。上式可化作为:
以上各式中:
ω 为航天器的绝对角速度矢量。
i I (i =0,1,2) 分别为主刚体和2个飞轮的惯性张量。
10112022
,d b d b ρρρρ=+=+121122,00x x y y b b b b b b ????????
==????????????
2
122000R(,,)J J ()J I I (I J )J b b i i i
i i i i i i i i i i H b j φθψωωθ===T =++??
=++-??
??
=∑∑∑ 22
111(J J )b i i i
i i ωθ-===-+∑∑
i θ(i =1,2) 分别为飞轮B绕b的转动角。 J i (i =1,2) 分别为动量飞轮B绕b的惯量矩。 又因为ω可以用卡尔丹角及其导数表示为:
代入上式,则有:
其中:(,,)q θψφ=
2.2 控制方法
将动量飞轮相对转动角速度 i θ取作输入变量,记作u ,定义航天器主刚体的位形
(,,)q θψφT =状态变量,则系统的状态方程为:
B(x)u q
= 其中:
2
2
-1
1
1
2
11
B(x)=L ()
,u=(,)
i i
i i J J b θθ-T
==-+∑∑
根据最小能量控制原理,选择航天器动量飞轮转动耗散能作为最优控制指标,性能指标函数为:
(),d T
J u u u t =?
在式中()u t 为Hilbert 空间2L 的可测向量函数。实际计算时,只需考虑有限维的情况,则u 可表示为Fourier 基向量{}1N
i i e =的线性组合
1N
i i i U e αφα===∑
其中()1,2,,i i N α== 为函数u在{}1N
i i e =基上的投影。将α视作新的控制变量,考虑终端约束条件,指标函数()J u 写为:
2
21(,)()N
i f i J x T x αλαλ==+-∑
λ为罚因子,可以证明,当N,λ→∞时,式()J u 与(,)J αλ有相同的最优解。()X T 是由控制输入u 给定在t T =时的解,为R αN ∈的函数,记作()()X T f α=。
cos cos sin 0cos cos cos 0sin 01ψφφθωψφφψψφ????????=-????????????
22
1111
L (J J )i i i
i i q b θ--===-+∑∑
给定N 和λ,则上式可变为:
(),()f J f x αααλα=+-
因此寻找控制输入u使式()J u 为最小值的问题转化为寻找α式指标函数()J α为最小值的问题。可以用无约束算法对变换后的系统求最优控制α,将α带入即得到原问题的最优控制u 。利用牛顿法,在极小点附近用指标函数()J u 的Taylor 多项式展开,取二阶近似并令9()/90n J αδδ+=,得到牛顿法的迭代公式
1
212n n n n J J
αααα-+????=- ?????
其中:
2(())n n f n
J
f x αλααT ???=+A -??? ()24212()i n fi i i n J f x λλααT
=???=E +A A +-H ?????
∑ 此式中A 为f 的Jacobi 矩阵,i H 为f 的分量i f 的Hesse 矩阵,E 为单位阵。因()E A A λT +恒为
正定,指标函数()J α又具有平方和形式,上式可用修正牛顿法,即Gauss-Newton 迭代公式表示
1
1
(())n n n n f f x α
ασγγαα+-T T
????=-E +A A +A -????
式中1/γλ=,σ为步长因子,01σ<<。上式中只需求出函数()n f α及其Jacobi 矩阵n
J
A α?=?即可迭代求解n α。应用微分方程的数值积分求出上式中的n
n
J A αα?=
?,
为此定义矩阵函数y 为:
()
()x t y t α
?=
?,且0(0)lim ()0t y y t →==
可得到关于()y t 的微分方程:
31()()i i i x y u y u x α=?B ????==+BΦ???????
∑
对微分方程B(x)u q
= 和上式从0到T 数值积分,并设()()n f X T α=,()A y T =代入迭代求解n α。对于给定系统初始位形0X 和终端位形f X 以及()B x ,可得到连接0X 到f X 的最优控制规律
()U t 。
3 模型仿真求解
考虑航天器利用2个动量飞轮转动控制姿态运动,航天器系统质量几何参数为:
1212120122
0212
2b 100b (0,1,0)0.2,0.5Kg m 500,5Kg,
I diag(86.215,85.07,113.565)Kg m I diag(0.5,0.25,0.25)Kg m I diag(0.25,0.5,0.25)Kg m d d m j j m Kg m m T
T
======?====?=?=?2(,,),
设航天器初始和终端位形分别为: 000q 0,q 00/6f π????
????==????????????
仿真试验中选取10个Fourier 正交基矢量,其中{}6
1()i i e t =为:
1234560.5sin cos sin cos sin e ,e ,e ,e ,e ,e 000000t t t t t ????????????
======????????????????????????
{}10
7()i i e t =分别由上式各基矢量行轮换得到。上例通过19次迭代达到最优指标值,19
α=61.67,
误差精度为210-。图2为航天器动量飞轮相对转动的最优控制输入规律,图3为航天器主刚体姿态运动优化时间历程。
图2 动量飞轮相对转动的最优控制输入规律
图3 (a,b,c )航天器主刚体姿态运动优化时间历程
4 结论
本文理论分析以及从图3的数值仿真可以看出,可以对航天器的位形进行从00q 00????=??????
到
0q 0/6f π??
??=??????
的有效控制,从而说明航天器在系统角动量为零的情况下,可以利用2个动量飞轮对刚体航天器的姿态进行控制。非线性最优控制算法在解决航天器姿态控制问题中是有效的。从仿真算例可看出刚体航天器可控并能完全达到指定终端位形。
参考文献:
[1] 刘延柱. 航天器姿态动力学[M]. 北京:国防工业出版社, 1995. [2] 黄圳圭. 航天器姿态动力学. 长沙, 国防科技大学出版社, 1997 [3] 杨嘉墀. 航天器轨道动力学与控制.. 北京, 宇航出版社, 2001
[4] 中国人民解放军总装备部军事训练教材编辑工作委员会. 航天器飞行控制与仿真. 北京, 国防工业出版社 2004.2
[5] Crouch P E. Spacecraft attitude control and stabilization :application of geometric control theory to rigid body models[J]. IEEE Transactions on Automatic Control ,1984, 29(4): 87-95
[6]Chris Fernandes, leonid Gurvits, Zexiang Li,Member,IEEE.Near-Optimal Nonholonomic Motion Planning For a System of Coujpled Rigid Bodies.1994.IEEE.450-463 附:
第八组人员名单:
1.3 航天器的基本系统组成及各部分作用? 航天器基本系统一般分为有效载荷和保障系统两大类。有效载荷:用于直接完成特定的航天飞行任务的部件、仪器或分系统。保障系统:用于保障航天器从火箭起飞到工作寿命终止, 星上所有分系统的正常工作。 1.4 航天器轨道和姿态控制的概念、内容和相互关系各是什么? 概念:轨道控制:对航天器的质心施以外力, 以有目的地改变其运动轨迹的技术; 姿态控制:对航天器绕质心施加力矩, 以保持或按需要改变其在空间的定向的技术。内容:轨道控制包括轨道确定和轨道控制两方面的内容。轨道确定的任务是研究如何确定航天器的位置和速度, 有时也称为空间导航, 简称导航; 轨道控制是根据航天器现有位置、速度、飞行的最终目标, 对质心施以控制力, 以改变其运动轨迹的技术, 有时也称为制导。姿态控制包括姿态确定和姿态控制两方面内容。姿态确定是研究航天器相对于某个基准的确定姿态方法。姿态控制是航天器在规定或预先确定的方向( 可称为参考方向)上定向的过程, 它包括姿态稳定和姿态机动。姿态稳定是指使姿态保持在指定方向, 而姿态机动是指航天器从一个姿态过渡到另一个姿态的再定向过程。关系:轨道控制与姿态控制密切相关。为实现轨道控制, 航天器姿态必须符合要求。也就是说, 当需要对航天器进行轨道控制时, 同时也要求进行姿态控制。在某些具体情况或某些飞行过程中, 可以把姿态控制和轨道控制分开来考虑。某些应用任务对航天器的轨道没有严格要求, 而对航天器的姿态却有要求。 1.5 阐述姿态稳定的各种方式, 比较其异同。 姿态稳定是保持已有姿态的控制, 航天器姿态稳定方式按航天器姿态运动的形式可大致分为两类。自旋稳定:卫星等航天器绕其一轴(自旋轴) 旋转, 依靠旋转动量矩保持自旋轴在惯性空间的指向。自旋稳定常辅以主动姿态控制, 来修正自旋轴指向误差。三轴稳定: 依靠主动姿态控制或利用环境力矩, 保持航天器本体三条正交轴线在某一参考空间的方向。 1.6主动控制与被动控制的主要区别是什么? 画出星—地大回路控制的结构图。 主动控制与被动控制的主要区别是航天器的控制力和力矩的来源不同。被动控制:其控制力或力矩由空间环境和航天器动力学特性提供, 不需要消耗星上能源。例如利用气动力或力矩、太阳辐射压力、重力梯度力矩,磁力矩等实现轨道或姿态的被动控制, 而不消耗工质或电能。主动控制:包括测量航天器的姿态和轨道, 处理测量数据, 按照一定的控制规律产生控制指令, 并执行指令产生对航天器的控制力或力矩。需要消耗电能或工质等星上能源, 由星载或地面设备组成闭环系统来实现。
航天器制导与控制课后题答案(西电) 1.3 航天器的基本系统组成及各部分作用? 航天器基本系统一般分为有效载荷和保障系统两大类。有效载荷:用于直接完成特定的航天飞行任务的部件、仪器或分系统。保障系统:用于保障航天器从火箭起飞到工作寿命终止, 星上所有分系统的正 常工作。 1.4 航天器轨道和姿态控制的概念、内容和相互关系各是什么? 概念:轨道控制:对航天器的质心施以外力, 以有目的地改变其运动轨迹的技术; 姿态控制:对航天器绕质心施加力矩, 以保持或按需要改变其在空间的定向的技术。内容:轨道控制包括轨道确定和轨道控制两方面的内容。轨道确定的任务是研究如何确定航天器的位置和速度, 有时也称为空间导航, 简称导航; 轨道控制是根据航天器现有位置、速度、飞行的最终目标, 对质心施以控制力, 以改变其运动轨迹的技术, 有时也称为制导。姿态控制包括姿态确定和姿态控制两方面内容。姿态确定是研究航天器相对于某个基准的确定姿态方法。姿态控制是航天器在规定或预先确定的方向( 可称为参考方向)上定向的过程, 它包括姿态稳定和姿态机动。姿态稳定是指使姿态保持在指定方向, 而姿态机动是指航天器从一个姿态过渡到另一个姿态的 再定向过程。关系:轨道控制与姿态控制密切相关。为实现轨道控制, 航天器姿态必须符合要求。也就是说, 当需要对航天器进行轨道控制时, 同时也要求进行姿态控制。在某些具体情况或某些飞行过程中,
可以把姿态控制和轨道控制分开来考虑。某些应用任务对航天器的轨道没有严格要求, 而对航天器的姿态却有要求。 1.5 阐述姿态稳定的各种方式, 比较其异同。 姿态稳定是保持已有姿态的控制, 航天器姿态稳定方式按航天 器姿态运动的形式可大致分为两类。自旋稳定:卫星等航天器绕其一轴(自旋轴) 旋转, 依靠旋转动量矩保持自旋轴在惯性空间的指向。自旋稳定常辅以主动姿态控制, 来修正自旋轴指向误差。三轴稳定: 依靠主动姿态控制或利用环境力矩, 保持航天器本体三条正交轴线在 某一参考空间的方向。 1.6主动控制与被动控制的主要区别是什么? 画出星—地大回路控制的结构图。 主动控制与被动控制的主要区别是航天器的控制力和力矩的来 源不同。被动控制: 其控制力或力矩由空间环境和航天器动力学特性提供, 不需要消耗星上能源。例如利用气动力或力矩、太阳辐射压力、重力梯度力矩,磁力矩等实现轨道或姿态的被动控制, 而不消耗工质或电能。主动控制: 包括测量航天器的姿态和轨道, 处理测量数据, 按照一定的控制规律产生控制指令, 并执行指令产生对航天器的控 制力或力矩。需要消耗电能或工质等星上能源, 由星载或地面设备组成闭环系统来实现。 2.1 利用牛顿万有引力定律推导、分析航天器受N 体引力时的运动方程, 并阐述简化为二体相对运动的合理性。 (1)解:牛顿万有引力定律:??r Fg??GMm
航天器控制原理自测试题三 一、名词解释(15%) 1、本体坐标系 2、偏置动量轮 3、主动控制系统 4、大圆弧轨迹机动 5、惯性导航 二、简答题(60%) 1、阐述航天器基本系统组成及各部分作用。 2、引力参数u是如何定义的? 3、叙述质点的动量矩定理及其守恒条件。 4、叙述双轴模拟式太阳敏感器的工作原理,并绘出原理结构图。 5、为了确保稳定性,对惯量比有什么要求? 6、画出喷气三轴姿态稳定控制系统的原理框图。简述喷气推力姿态稳定的基本原理。 7、自旋稳定卫星喷气姿态机动的原理是什么?喷气角的选择为什么不能过小? 8、GPS有哪几部分组成,各有什么功用。 9、举例说明载人飞船的主要构造。 10、航天飞机基本结构组成是什么?哪些可以重复使用,那些不可以? 三、推导题(15%) 1、证明在仅有二体引力的作用下,航天起的机械能守恒。 2、推导欧拉力矩方程式。 四、计算题(10%) 已知一自旋卫星动量矩H=3500Kg·m2/s,自旋角速度为ω=60r/min,喷气力矩Mc=40N·m,喷气角为γ=40。,要求自旋进动θc=80。问喷气一次自旋进动多少?总共需要多少次和多长时间才能完成进动?
航天器控制原理自测试题三答案 一、名词解释15% 1、本体坐标系 答:又称为星体坐标系。在此坐标系中,原点0在航天器质心,Ox ,Oy ,Oz 三轴固定在航天器本体上。若Ox ,Oy ,Oz 三轴为航天器的惯量主轴,则该坐标系称为主轴坐标系。 2、偏置动量轮 答:如果飞轮的平均动量矩是一个不为零的常值——偏置值,也就是说飞轮储存了一个较大的动量矩,飞轮的转速可以相对于偏置值有一定的变化,从而产生控制力矩。具有这种特点的飞轮称为动量轮或偏置动量轮。 3、主动控制系统 答:航天器主动式姿态控制系统的控制力矩来自于航天器上的能源,它属于闭环控制系统。 4、大圆弧轨迹机动 答:若要求自旋轴在天球上描绘的轨迹是大圆弧 ,那么自旋轴必须在同一平面内从初始方向机动到目标方向,所以每次喷气产生的横向控制力矩必须在此平面内,即推力器喷气的相位相对于空间惯性坐标系是固定的。此为大圆弧轨迹机动. 5、惯性导航 答:它主要由惯性测量装置、计算机和稳定平台(捷联式没有稳定平台)组成。通过陀螺和加速度计测量航天器相对于惯性空间的角速度和线加速度,并由计算机推算出航天器的位置、速度和姿态等信息。因此惯性导航系统也是航天器的自备式航位推算系统。 二、简答题 0F AA A 0OA F OA
飞行器姿态控制方法综述 一.引言 经过一个世纪的发展,各种飞行器如雨后春笋般出现,从飞机、导弹到火箭、卫星,从宇宙飞船、航天飞机、空间站到月球探测器、火星探测器。这些飞行器能在空中按预定的轨迹运动总离不开它的姿态控制系统,飞行器在空间的运动是十分复杂的。为使问题简单化,总是将一飞行器的空间运动分解为铅锤平面的纵向运动和水平面内的侧向运动,将飞行器在空间的角运动分解成俯仰、偏航和滚动三个角运动。由于角运.动使飞行器的姿态发生变化,所以对角运动的控制就是对飞行器姿态的控制。对于飞行器姿态的控制,不同的飞行器需要不同的策略,本文主要就飞行器姿态控制方法的应用与发展作一一论述。 二.姿态控制的数学模型 要控制飞行器的姿态,就是要控制使飞行器三个姿态角发生变化的力矩大小。飞行器的姿态模型可以认为是一类不确定MIMO 仿射非线性系统,如式(1)所示: ()//()//()//(cos sin )/cos cos sin sin tan cos tan x y z y x x x x x z x x x y y y x x y x y z z z x x x z x y z I I I M I I I I M I I I I M I ωωωωωωωωωψ ωθωθ??ωθωθ θωθ?ωωθ?=-+??=-+??=-+??=-??=+?=+-?? (1) 式中,x 、y 、z 下标表示空间飞行器的三个主轴方向;I 表示相对于飞行器质心的惯量矩,设飞行器是主轴对称的,则惯量积可以忽略;ω表示飞行器相对于惯性空间的角速度;M 表示控制力矩;,,ψ?θ分别是飞行器的欧拉角。控制了M 的大小,就可以控制飞行器按我们期望的轨迹运动。M 由飞行器上的执行机构产生,常见的有空气舵、推力矢量发动机、反作用飞轮、喷气执行机构或由其它环境力执行机构。 三.飞行器姿态控制方法 3.1空气动力控制 根据运动的相对性原理和气体流动时的基本定律,当飞行器在大气中以一定
姿态解算 姿态解算(attitude algorithm),是指把陀螺仪,加速度计, 罗盘等的数据融合在一起,得出飞行器的空中姿态,飞行器从陀螺仪器的三轴角速度通过四元数法得到俯仰,航偏,滚转角,这是快速解算,结合三轴地磁和三周加速度得到漂移补偿和深度解算。 姿态的数学模型坐标系 姿态解算需要解决的是四轴飞行器和地球的相对姿态问题。地理坐标系是固定不变的,正北,正东,正上构成了坐标系的X,Y,Z轴用坐标系R表示,飞行器上固定一个坐标系用r表示,那么我们就可以适用欧拉角,四元数等来描述r和R的角位置关系。 姿态的数学表示 姿态有多种数学表示方式,常见的是四元数,欧拉角,矩阵和轴角。在四轴飞行器中使用到了四元数和欧拉角,姿态解算的核心在于旋转。姿态解算中使用四元数来保存飞行器的姿态,包括旋转和方位。在获得四元数之后,会将其转化为欧拉角,然后输入到姿态控制算法中。姿态控制
算法的输入参数必须要是欧拉角。AD值是指MPU6050的陀螺仪和加速度值,3个维度的陀螺仪值和3个维度的加速度值,每个值为16位精度。AD值必须先转化为四元数,然后通过四元数转化为欧拉角。在四轴上控制流程如下图: 下面是用四元数表示飞行姿态的数学公式,从MPU6050中采集的数据经过下面的公式计算就可以转换成欧拉角,传给姿态PID控制器中进行姿态控制.
PID控制算法 先简单说明下四轴飞行器是如何飞行的,四轴飞行器的螺旋桨与空气发生相对运动,产生了向上的升力,当升力大于四轴的重力时四轴就可以起飞了。四轴飞行器飞行过程中如何保持水平:我们先假设一种理想状况:四个电机的转速是完全相同的是不是我们控制四轴飞行器的四个电机保持同样的转速,当转速超过一个临界点时(升力刚好抵消重力)四轴就可以平稳的飞起来了呢?答案是否定的,由于四个电机转向相同,四轴会发生旋转。我们控制四轴电机1和电机3同向,电机2电机4反向,刚好抵消反扭矩,巧妙的实现了平衡, 但是实际上由于电机和螺旋
航天器控制工具箱 Spacecraft Control Toolbox 基于Matlab软件的航天器控制工具箱Spacecraft Control Toolbox 是Princeton Satellite System公司(简称PSS)最早和应用最广的产品之一,有20多年的历史,被广泛用来设计控制系统、进行姿态估计、分析位置保持精度、制定燃料预算以及分析航天器动力学特性等工作。Spacecraft Control Toolbox 工具箱经过多次飞行验证,证明是行之有效的。这个工具箱涵盖了航天器控制设计的各个方面。用户可以在很短的时间内完成各种类型航天器控制系统的设计和仿真试验。软件的模型和数据易于修改,具有良好的可视化功能。大部分算法都可以看到源代码。 Spacecraft Control Toolbox(简称SCT)由不同的模块组成。 组成结构图如下 各个模块的主要功能和特点
SCT Core Toolbox -- 基本工具箱 SCT基本工具箱针对需要迅速解决实际工程问题的工程师而设计,包含了航天器控制系统设计的基本内容,也是其他SCT模块运行的基础。它建立在PSS公司大量工程经验的基础上,其中包括GPS IIR、Inmarsat 3和GGS Polar Platform卫星的控制系统设计。迄今这些系统仍然在太空正常运行。PSS公司使用这个工具箱完成的Cakrawarta-1卫星姿态控制系统设计,所花费用仅仅是通常的十分之一。这颗卫星从1997年11月升空一直运行至今。另外的例子还包括一颗NASA卫星的姿态控制系统设计。 主要功能和特点 ?航天器控制系统设计和分析 ?柔性多体航天器姿态动力学建模 ?包含柔性体展开模型和多体的逻辑树描述 ?轨道动力学分析和仿真 ?姿态估计 ?星历表计算 ?包括大气、重力场和磁场的环境模型 ?指向保持的燃料预算 ?各种有用参数的数据库; ?可视化
航天器的姿态与轨道最优控制 董丽娜唐晓华吴朝俊司渭滨(第八小组) (西安交通大学电气工程学院,陕西省,西安市 710049) 【摘要】从航天器的轨道运动学方程出发, 运用线性离散系统最优控制理论, 提出了一种用于航天器轨道维持与轨道机动的最优控制方法, 建立了相关的最优控制模型并给出了求解该模型的算法。仿真计算结果表明, 本文提出的最优控制方法是正确和可行的。 【关键词】航天器轨道保持轨道机动最佳控制 Optimal Control of Spacecraft State and Orbit Dong LiNa,Tang XiaoHua,Wu ChaoJun,Si WeiBin (EE School of Xi’an Jiaotong university,Xi’an, Shannxi province, 710049)【Abstract】This paper provides a new optimal control method for orbital maintenance and maneuver ,which begins with the kinetics equation of spacecraft and is based on the linear discrete optimal control theory , establishes the relative optimal control model and gives its solution. The simulation results show that the given optimal control method in this paper is correct and feasible. 【Key word】Spacecraft ,Orbital keeping ,Orbital maneuver ,Optimal control 1 引言 一般地,常见的航天器有:运载火箭、人造卫星、载人飞船、宇宙飞船、空间站等。宇宙飞船也称太空飞船,它和航天飞机都是往返于地球和在轨道上运行的航天器(如空间站) 。
实验一航天器轨道要素与空间位置关系 一、实验目的 1.了解航天器轨道六要素与空间位置的关系。 2.掌握航天器轨道要素的含义。 二、实验设备 安装有Matlab的计算机。 三、实验内容 1.实验原理 航天器的六个轨道要素用于描述航天器的轨道特性,有明显的几何意义。它们决定轨道的大小、形状和空间的方位,同时给出航天器运动的起始点。这六个轨道要素分别是: ①轨道半长轴(a):它的长度是椭圆长轴的一半,可用公里或地球赤道半径或天文单位为单位。根据开普勒第三定律,半长轴与运行周期之间有确定的换算关系。 ②轨道偏心率(e):为椭圆两焦点之间的距离与长轴的比值。偏心率为0时轨道是圆;偏心率在0~1之间时轨道是椭圆,这个值越大椭圆越扁;偏心率等于1时轨道是抛物线;偏心率大于1时轨道是双曲线。抛物线的半长轴是无穷大,双曲线的半长轴小于零。 ③轨道倾角(i):轨道平面与地球赤道平面的夹角,用地轴的北极方向与轨道平面的正法线方向之间的夹角度量,轨道倾角的值从0°~180°。倾角小于90°为顺行轨道,卫星总是从西(西南或西北)向东(东北或东南)运行。倾角大于90°为逆行轨道,卫星的运行方向与顺行轨道相反。倾角等于90°为极轨道。 ④升交点赤经(Ω):它是一个角度量。轨道平面与地球赤道有两个交点,卫星从南半球穿过赤道到北半球的运行弧段称为升段,这时穿过赤道的那一点为升交点。相反,卫星从北半球到南半球的运行弧段称为降段,相应的赤道上的交点为降交点。在地球绕太阳的公转中,太阳从南半球到北半球时穿过赤道的点称为春分点。春分点和升交点对地心的张角为升交点赤经,并规定从春分点逆时针量到升交点。轨道倾角和升交点赤经共同决定轨道平面在空间的方位。
1.1 世界航天技术发展的概况 航天技术发展是当今世界上最引人注目的事业之一,它推动着人类科学技术的进步,使人类活动的领域由大气层内扩展到宇宙空间。航天技术是现代科学技术的结晶,是基础科学和技术科学的集成,力学、热力学、材料学、医学、电子技术、光电子技术、自动控制、计算机、真空技术、低温技术、半导体技术、喷气推进、制造工艺学等学科,以及这些科学技术在航天应用中相互交叉、渗透而产生的大量新学科,都对航天技术的发展起了重要作用。所以,航天技术是一个国家科学技术水平的重要标志。 航天技术是一门综合性的工程技术,主要包括:制导与控制技术,热控制技术,喷气推进技术,能源技术,空间通信技术,遥测遥控技术,生命保障技术,航天环境工程技术,火箭及航天器的设计、制造和试验技术,航天器的发射、返回和在轨技术等。由多种技术融于一体的航天系统是现代高技术的复杂大系统,不仅规模庞大,技术高新、尖端,而且人力、物力耗费巨大,工程周期长。时至今日,航天技术已被广泛应用到政治、军事、经济和科学探测等领域,已成为一个国家综合国力的象征。 .1.2 近代航天技术的发展 19世纪末20世纪初,火箭才又重新蓬勃地发展起来。近代的火箭技术和航天飞行的发展,涌现出许多勇于探索的航天先驱者,其中代表人物K.3.齐奥尔科夫斯基,R.戈达德(Robert Goddard),H.奥伯特(Hermann Oberth)。 航天技术从20世纪50年代末期的研究试验阶段到70年代中期,发展到了广泛实际应用阶段。其中60年代以来,为科学研究、国民经济和军事服务的各种科学卫星与应用卫星得到了很大发展。至70年代,军、民用卫星已全面进入应用阶段。一方面向侦察、通信、导航、预警、气象、测地、海洋、天文观测和地球资源等专门化的方向发展,同时另一方面,各类卫星亦向多用途、长寿命、高可靠性和低成本的方向发展。这两种趋势相互补充,取得了显著的效益。80年代中后期,基于模块化和集成化设计思想的新型微、小卫星崛起,成为航天技术发展中的一个新动向。这类卫星重量轻、成本低、研制周期短、见效快,已逐渐成为今后应用卫星的一支生力军。
航天器控制课程大作业 1.基本内容 ?建立带有反作用飞轮的三轴稳定对地定向航天器的姿态动力学和姿态运动学模型; ?基于欧拉角或四元数姿态描述方法,设计PD型或PID型姿态控制律(任选一种); ?利用MATLAB/Simulink软件建立航天器闭环姿态控制系统,设计姿态控制器进行闭合回路数学仿真,实现给定控制指标和 性能指标。 ?调研基于星敏感器+陀螺的姿态确定算法并撰写报告,要求不少于1500字。内容包括: ?星敏感器、陀螺数学模型 ?Landsat-D卫星姿态确定调研 包括:姿态敏感器组成、姿态敏感器性能、姿态确定算法及其精度 ?单星敏感器+陀螺的kalman滤波器姿态估计 ?双星敏感器姿态确定算法(双矢量定姿) ?列出主要参考文献 2.具体要求和相关参数 1)建立航天器姿态动力学方程以及基于欧拉角描述(3-1-2转序)的姿态运动学方程。基于如下假设,对航天器姿态动力学和姿态运动学模型进行简化: ?航天器的轨道为近圆轨道,对应轨道角速度为常数; ?航天器的本体坐标系与其主惯量坐标系重合,惯量积为零;
? 航天器姿态稳定控制时,姿态角和姿态角速度均为小量。 进一步建立适用于航天器姿态稳定或小姿态角度工况下的线性化航天器姿态动力学和运动学模型。 2) 航天器转动惯量矩阵 2200024142460018kg m 14182500????=??????? I 轨道角速度00.0012rad/s ω=。设航天器本体系三轴方向所受干扰力矩如下: 040003cos 1() 1.510 1.5sin 3cos N m 3sin 1d t t t t t ωωωω-+????=?+?????+??T 仿真中,假设初始三轴姿态角为002~5和初始三轴姿态角速度000.01/s ~0.05/s 。 3) 采用三正装反作用飞轮作为执行机构,飞轮最大控制力矩为0.4Nm ,最大角动量20Nms 。飞轮采用力矩模式,模型采用一阶惯性环节(时间常数为0.005s ),考虑库仑摩擦力矩4410Nm -?,要求飞轮的数学模型带有饱和特性。 4) 控制指标和性能指标: ? 稳定度(姿态角速度):优于0.005deg/s ; ? 指向精度(姿态角):优于0.1deg ; ? 姿态稳定收敛时间小于100s 。
航天器控制原理自测试题一 一、名词解释(15%) 1、姿态运动学 2、惯性轮 3、姿态机动控制 4、空间导航 5、空间站的姿态控制 二、简答题(60%) 1、航天器按载人与否是如何分类的?各类航天器的作用和特点是什么?请举出你所知的各类航天器的国内外的例子。 2、开普勒三大定律是什么?牛顿三大定律是什么? 3、分析描述航天器姿态运动常用的参考坐标系之间的相对关系。 4、画出航天器控制系统结构图并叙述其原理。 5、液体环阻尼器有什么特点,适用于什么场合? 6、写出卫星姿态自由转动的欧拉动力学方程。 7、主动姿态稳定系统包括哪几种方式? 8、推力器的工作时间为什么不能过小? 9、简述导航与制导系统的功能,及其为实现此功能而必须完成的工作。 10、载人飞船在结构上较一般卫星有什么特点? 三、推导题(15%) 1、利用牛顿万有引力定律推导、分析航天器受N体引力时的运动方程,并阐述简化为二体相对运动的合理性。8% 2、推导Oxyz和OXYZ两坐标系之间按“1-2-3”顺序旋转的变换矩阵和逆变换矩阵,并在小角度假设下予以线性化。7%
四、计算题(10%) 1. 已知一自旋卫星动量矩H=2500Kg·m2/s,自旋角速度为ω=60r/min,喷气力矩 Mc=20N·m,喷气角为γ=45。,要求自旋进动θc=90。。问喷气一次自旋进动多少?总共需 要多少次和多长时间才能完成进动? 航天器控制原理自测试题一答案 一、名词解释(15%) 1、姿态运动学 答:航天器的姿态运动学是从几何学的观点来研究航天器的运动,它只讨论航天器运动的几何性质,不涉及产生运动和改变运动的原因 2、惯性轮 答:当飞轮的支承与航天器固连时,飞轮动量矩方向相对于航天器本体坐标系Oxyz不变,但飞轮的转速可以变化,这种工作方式的飞轮通常称为惯性轮。 3、姿态机动控制 答:姿态机动控制是研究航天器从一个初始姿态转变到另一个姿态的再定向过程。如果初始姿态未知,例如当航天器与运载工具分离时,航天器还处在未控状态;或者由于受到干扰影响,航天器姿态不能预先完全确定,那么特地把这种从一个未知姿态或者未控姿态机动到预定姿态的过程称为姿态捕获或对准。 4、空间导航 答:航天器轨道的变化也称为空间导航,包括轨道确定和轨道控制两个方面,由导航与制导系统完成。 5、空间站的姿态控制 答:空间站姿态控制分为姿态稳定和姿态机动两部分。姿态稳定又分为两种情况:第一种情况为对地球指向稳定,主要为与地面通信联系和有关的数据传递提供稳定姿态。第二种情况,姿态控制精度由有效载荷或者在空间站进行的有关实验提出,此种精度要求视有效载荷和实验研究的不同而不同。 二、简答题(60%) 1、航天器按载人与否是如何分类的?各类航天器的作用和特点是什么?请举出你所知的各类航天器的国内外的例子。
实验一卫星轨道参数仿真 一、实验目的 1、了解STK的基本功能; 2、掌握六个轨道参数的几何意义; 3、掌握极地轨道、太阳同步轨道、地球同步轨道等典型轨道的特点。 二、实验环境 卫星仿真工具包STK 三、实验原理 (1)卫星轨道参数 六个轨道参数中,两个轨道参数确定轨道大小和形状,两个轨道参数确定轨道平面在空间中的位置,一个轨道参数确定轨道在轨道平面内的指向,一个参数确定卫星在轨道上的位置。 ? 轨道大小和形状参数: 这两个参数是相互关联的,第一个参数定义之后第二个参数也被确定。 第一个参数第二个参数 semimajor axis 半长轴Eccentricity 偏心率 apogee radius 远地点半径perigee radius 近地点半径 apogee altitude 远地点高度perigee altitude 近地点高度 Period 轨道周期Eccentricity 偏心率 mean motion平动Eccentricity 偏心率
图1 决定轨道大小和形状的参数 ?轨道位置参数: 轨道倾角(Inclination)轨道平面与赤道平面夹角 升交点赤经(RAAN)赤道平面春分点向右与升交点夹角 近地点幅角(argument of perigee)升交点与近地点夹角 ?卫星位置参数: 表1 卫星位置参数 (2)星下点轨迹 在不考虑地球自转时,航天器的星下点轨迹直接用赤经α、赤纬δ表示(如图2)。直接由轨道根数求得航天器的赤经赤纬。
图2 航天器星下点的球面解法 在球面直角三角形SND 中: ?? ???+==??+Ω=+==)tan(cos tan cos tan )sin(sin sin sin sin f i u i f i u i ωαα αωδ (1) 由于地球自转和摄动影响,相邻轨道周期的星下点轨迹不可能重合。设地球自转角速度为E ω,t 0时刻格林尼治恒星时为0G S ,则任一时刻格林尼治恒星时G S 可表示成: )(00t t S S E G G -+=ω (2) 在考虑地球自转时,星下点地心纬度? 与航天器赤纬δ仍然相等,星下点经度(λ)与航天器赤经α的关系为: ???=---=-=δ ?ωααλ)(00t t S S E G G (3) 将(1)代入上式,得到计算空间目标星下点地心经纬度()?λ,的公式,即空间目标的星下点轨迹方程为: ? ???=---?+Ω=)sin arcsin(sin )()tan arctan(cos 00u i t t S u i E G ?ωλ (4) 其中? 为星下点的地理纬度,λ 为星下点的地理经度,u 是纬度幅角,ωE 为地球自转角速度。由(4)中的第二式可知,i =90?时,? 取极大值?max 。i =-90?时,? 取极小值
飞行器姿态控制方法综述 一.引言 经过一个世纪的发展,各种飞行器如雨后春笋般出现,从飞机、导弹到火箭、卫星,从宇宙飞船、航天飞机、空间站到月球探测器、火星探测器。这些飞行器能在空中按预定的轨迹运动总离不开它的姿态控制系统,飞行器在空间的运动是十分复杂的。为使问题简单化,总是将一飞行器的空间运动分解为铅锤平面的纵向运动和水平面内的侧向运动,将飞行器在空间的角运动分解成俯仰、偏航和滚动三个角运动。由于角运.动使飞行器的姿态发生变化,所以对角运动的控制就是对飞行器姿态的控制。对于飞行器姿态的控制,不同的飞行器需要不同的策略,本文主要就飞行器姿态控制方法的应用与发展作一一论述。 二.姿态控制的数学模型 要控制飞行器的姿态,就是要控制使飞行器三个姿态角发生变化的力矩大小。飞行器的姿态模型可以认为是一类不确定MIMO 仿射非线性系统,如式(1)所示: ()//()//()//(cos sin )/cos cos sin sin tan cos tan x y z y x x x x x z x x x y y y x x y x y z z z x x x z x y z I I I M I I I I M I I I I M I ωωωωωωωωωψωθωθ??ωθωθθωθ?ωωθ? =-+??=-+??=-+??=-??=+?=+-??&&&&&& (1) 式中,x 、y 、z 下标表示空间飞行器的三个主轴方向;I 表示相对于飞行器质心的惯量矩,设飞行器是主轴对称的,则惯量积可以忽略;ω表示飞行器相对于惯性空间的角速度;M 表示控制力矩;,,ψ?θ分别是飞行器的欧拉角。控制了M 的大小,就可以控制飞行器按我们期望的轨迹运动。M 由飞行器上的执行机构产生,常见的有空气舵、推力矢量发动机、反作用飞轮、喷气执行机构或由其它环境力执行机构。 三.飞行器姿态控制方法 3.1空气动力控制 根据运动的相对性原理和气体流动时的基本定律,当飞行器在大气中以一定
从开始做四轴到现在,已经累计使用了三个月的时间,从开始的尝试用四元数法进行姿态检测,到接着使用的卡尔曼滤波算法,我们走过了很多弯路,我在从上周开始了对德国人四轴代码的研究和移植,发现德国人的代码的确有他的独到之处,改变了很多我对模型的想法,因为本人是第一次尝试着制作模型,因此感觉很多想法还是比较简单。经过了一周的时间,我将德国人的代码翻译并移植到了我目前的四轴上,并进行了调试,今天,专门请到了一个飞直升机的教练,对我们的四轴进行试飞,并与一个华科尔的四轴进行了现场比较,现在我们四轴的稳定性已经达到了商品四轴的程度。下面是我这一周时间内对德国人代码的一些理解: 德国人代码中的姿态检测算法: 首先,将陀螺仪和加速度及的测量值减常值误差,得到角速度和加速度,并对角速度进行积分,然后对陀螺仪积分和加速度计的数值进行融合。融合分为两部分,实时融合和长期融合,实时融合每一次算法周期都要执行,而长期融合没256个检测周期执行一次,(注意检测周期小于控制周期的2ms) 实时融合: 1.将陀螺仪积分和加表滤波后的值做差; 2.按照情况对差值进行衰减,并作限幅处理; 3.将衰减值加入到角度中。 长期融合: 长期融合主要包括两个部分,一是对角速度的漂移进行估计(估计值是要在每一个控制周期都耦合到角度中的),二是对陀螺仪的常值误差(也就是陀螺仪中立点)进行实时的修正。 1.将陀螺仪积分的积分和加速度积分做差(PS:为什么这里要使用加表积分和陀螺仪积分的积分,因为在256个检测周期内,有一些加速度计的值含有有害的加速度分量,如果只使用一个时刻的加表值对陀螺仪漂移进行估计,显然估计值不会准确,使用多个周期的值进行叠加后做座平均处理,可以减小随机的有害加速度对估计陀螺仪漂移过程中所锁产生的影响) 2.将上面两个值进行衰减,得到估计的陀螺仪漂移 3.对使考虑了陀螺仪漂移和不考虑陀螺仪漂移得到的角度做差,如果这两个值较大,说明陀螺仪在前段时间内测到的角速率不够准确,需要对差值误差(也就是陀螺仪中立点)进行修正,修正幅度和差值有关 长期融合十分关键,如果不能对陀螺仪漂移做修正,则系统运行一段时间后,速率环的稳定性会降低。 下面比较一下德国四轴中姿态检测部分和卡尔曼滤波之间的关系: 卡尔曼滤波是一种线性系统的最优估计滤波方法。对于本系统而言,使用卡尔曼滤波的作用是通过对系统状态量的估计,和通过加速度计测量值对系统状态进行验证,从而得到该系统的最优状态量,并实时更新系统的各参数(矩阵),而最重要的一点,改滤波器能够对陀螺仪的常值漂移进行估计,从而保证速率环的正常运行,并在加速度计敏感到各种有害加速度的时候,使姿态检测更加准确。但是卡尔曼滤波器能否工作在最优状态很大程度上取决于系统模型的准确性,模型参数的标定和系统参数的选取。然而,仅仅通过上位机观测而得到最优工作参数是不显示的,因为参数的修改会导致整个系统中很多地方发生改变,很难保证几个值都恰好为最优解,这需要扎实的理论知识,大量的测量数据和系统的仿真,通过我对卡尔曼滤波器的使用,发现要想兼顾锁有的问题,还是有一定难度的。
第一章航天器控制的基本概念1.轨道控制 a.轨道确定(导航) 研究如何确定航天器的位置和速度b. 轨道控制(制导) 根据位置、速度、飞行最终目标,对质心施以控制力,以改变运动轨迹的技术轨道机动、轨道保持轨道交会、再入返回控制2.姿态控制a.姿态确定研究航天器相对于某个基准的确定姿态方法;可以是惯性基准或其他基准,如地球;采用姿态敏感器和相应的数据处理方法;确定精度取决于数据处理方法和敏感器精度。b. 姿态控制在规定或预定方向(参考方向)上定向的过程;姿态稳定是指使姿态保持在指定方向;姿态机动是指航天器从一个姿态过渡到另一个姿态的再定向过程。3.姿态稳定 a.特点长期而持续的所需控制力矩较小b.种类定向粗对准精对准4. 姿态机动a.特点短暂过程所需控制力矩较大b.种类再定向捕获跟踪和搜索4. 姿态控制与轨道控制的关系为实现轨道控制,航天器姿态必须符合要求;在某些具体情况或某些飞行过程中,可把姿态控制和轨道控制分开考虑;某些应用任务对航天器轨道没有严格要求,而对航天器姿态确有要求;例如:空间环境探测卫星绕地球的运行往往不需要轨道控制,卫星在开普勒轨道上运行就能满足对环境探测的要求。5.姿态控制系统分类 a.根据姿态稳定方式三轴稳定.保持航天器本体三条正交轴线在某一参考空间的方向自旋稳定.绕自旋轴旋转,依靠旋转动量矩在惯性空间的指向b.根据力来源被动控制.不需消耗星上能源,如重力梯度力矩、磁力矩等主动控制.星上自主控制、星-地大回路控制,消耗电能和工质6.姿态控制系统的设计要求可靠性控制性能a.动量、稳定性b.稳态精度c.动态响应控制系统质量和能源需求附带要求a.经济性b.坚固性c.生产可能性7.姿态控制系统设计任务a.了解任务参数任务类型、质量、结构、轨道几何参数、任务寿命、精度、机动要求b.推导出控制系统质量和能源需求可靠性及寿命动量要求力矩要求:大小、频率、杠臂限制动态响应精度 能源要求c.具体设计 第二章姿态运动学与动力学1.方向余弦阵的性质及特点方向余弦阵只有三个独立参数方向余弦阵是正交矩阵AA T=E方向余弦阵的行列式为1|A|=1方向余弦阵可作为坐标变换矩阵V a=A Vb相继姿态运动的方向余弦阵具有中间脚标的吸收性质。缺点:不直观,缺乏明显的几何图象概念,使用不方便2.用EulerEuler轴/角描述姿态的理论依据Euler定理:刚体绕固定点的任一位移,可由绕通过此点的某一轴转过一个角度得到。姿态描述可用转轴e和绕此轴的转角φ来描述两个坐标系间的相对姿态。Euler轴/角的形式及特点形式转轴e在参考坐标系中的三个方向余弦(ex, ey, ez)转角φ优点具有明确的几何意义,直观,易于理解;是四元素、Rodrigues参数等其它姿态描述方法的基础。缺点仍具有一个约束条件,不是姿态描述的最小实现;与姿态之间不是一一对应的。常用Euler角3-1-3 ψ, θ, ?自旋卫星绕oZ轴旋转, Rz(ψ)绕oX'轴旋转, Rx(θ)绕oZ"轴旋转Rz(?)3-1-2 ψ, ?, θ三轴稳定卫星绕oZ轴旋转, Rz(ψ)绕oX'轴旋转, Rx(?)绕oY"轴旋转,Ry(θ) 在轨道坐标系内ψ为偏航角?为滚动角θ为俯仰角。3. Euler角的特点优点几何意义直观、明显小角度线性化方便在某些情况下,可直接测量缺点包含三角函数,计算效率低运动学方程有奇点4. 四元数特点与方向余弦阵相比,四元素只包含4个变量和1个约束与Euler轴/角相比,四元素姿态矩阵不含三角函数四元素可看作姿态机动参数。缺点:四元数仍存在一个约束条件,不是姿态描述的最小实现。5.Rodrigues参数的优缺点优点姿态描述的最小实现;简单、直观,计算效率高;由其描述的运动学方程结构简洁,无多余约束。缺点当φ→±180°时,x→±∞,不能有效描述姿态;当φ远小于180°时,才能有效描述姿态。6.重力梯度力矩的性质重力梯度力矩与主惯量差成正比重力梯度力矩与轨道角速度的平方成反比重力梯度力矩与姿态偏差角(小角度假设下)成正比当Izz< 《基于 STK 的航天器轨道仿真与设计》 课程设计报告 班级 : 341511班 组长 :王楷 组 员 :邹希、赵俊杰、聂秋华 日期 : 2007年 12月 20日 目录 一、介绍STK的应用背景和主要功能................................- 1 - 1. STK 应用背景.............................................................................................- 1 - 2. STK 主要功能.............................................................................................- 1 - 二、嫦娥奔月的设计过程.........................................- 2 - 1.各国的探月计划............................................................................................- 2 - 2.设计要求.......................................................................................................- 4 - 3. 设计思路.....................................................................................................- 5 - 4. 设计中使用的参数......................................................................................- 5 - 5. 地球停泊轨道分析与设计..........................................................................- 5 - 6. 地月转移轨道分析与设计..........................................................................- 5 - 三、基于STK模型描述语言的航天器三维造型及动画制作.............. - 13 - 1. STK/VO 模块简介....................................................................................- 13 - 2. STK/VO 设计要求....................................................................................- 13 - 3. STK/VO 设计模型选择............................................................................- 13 - 4. 中巴地球资源卫星简介............................................................................- 14 - 5. 中巴地球资源卫星模型设计....................................................................- 14 - 6. 动画制作...................................................................................................- 16 - 四、收获与体会 ............................................... - 17 - 五、参考文献 ................................................. - 17 - 六、成员分工 ................................................. - 17 -基于STK的航天器轨道仿真与设计
相关主题
文本预览