《工程测试技术基础》
论文题目:霍尔传感器的工作原理及实际应用班级:
姓名:
学号:
指导教师:
霍尔传感器的工作原理及实际运用
谭振超
摘要:霍尔器件是一种磁传感器。用它们可以检测磁场及其变化,可在各种与磁场有关的场合中使用。霍尔器件以霍尔效应为其工作基础。霍尔器件具有许多优点,它们的结构牢固,体积小,重量轻,寿命长,安装方便,功耗小,频率高(可达1MHZ),耐震动,不怕灰尘、油污、水汽及盐雾等的污染或腐蚀。霍尔线性器件的精度高、线性度好;霍尔开关器件无触点、无磨损、输出波形清晰、无抖动、无回跳、位置重复精度高(可达μm 级)。取用了各种补偿和保护措施的霍尔器件的工作温度范围宽,可达-55℃~150℃。
关键词:霍尔器件;霍尔效应;检测;补偿;
1霍尔传感器的工作原理
按照霍尔器件的功能可将它们分为:霍尔线性器件和霍尔开关器件。前者输出模拟量,后者输出数字量。按被检测的对象的性质可将它们的应用分为:直接应用和间接应用。前者是直接检测出受检测对象本身的磁场或磁特性,后者是检测受检对象上人为设置的磁场,用这个磁场来作被检测的信息的载体,通过它,将许多非电、非磁的物理量例如力、力矩、压力、应力、位置、位移、速度、加速度、角度、角速度、转数、转速以及工作状态发生变化的时间等,转变成电量来进行检测和控制。
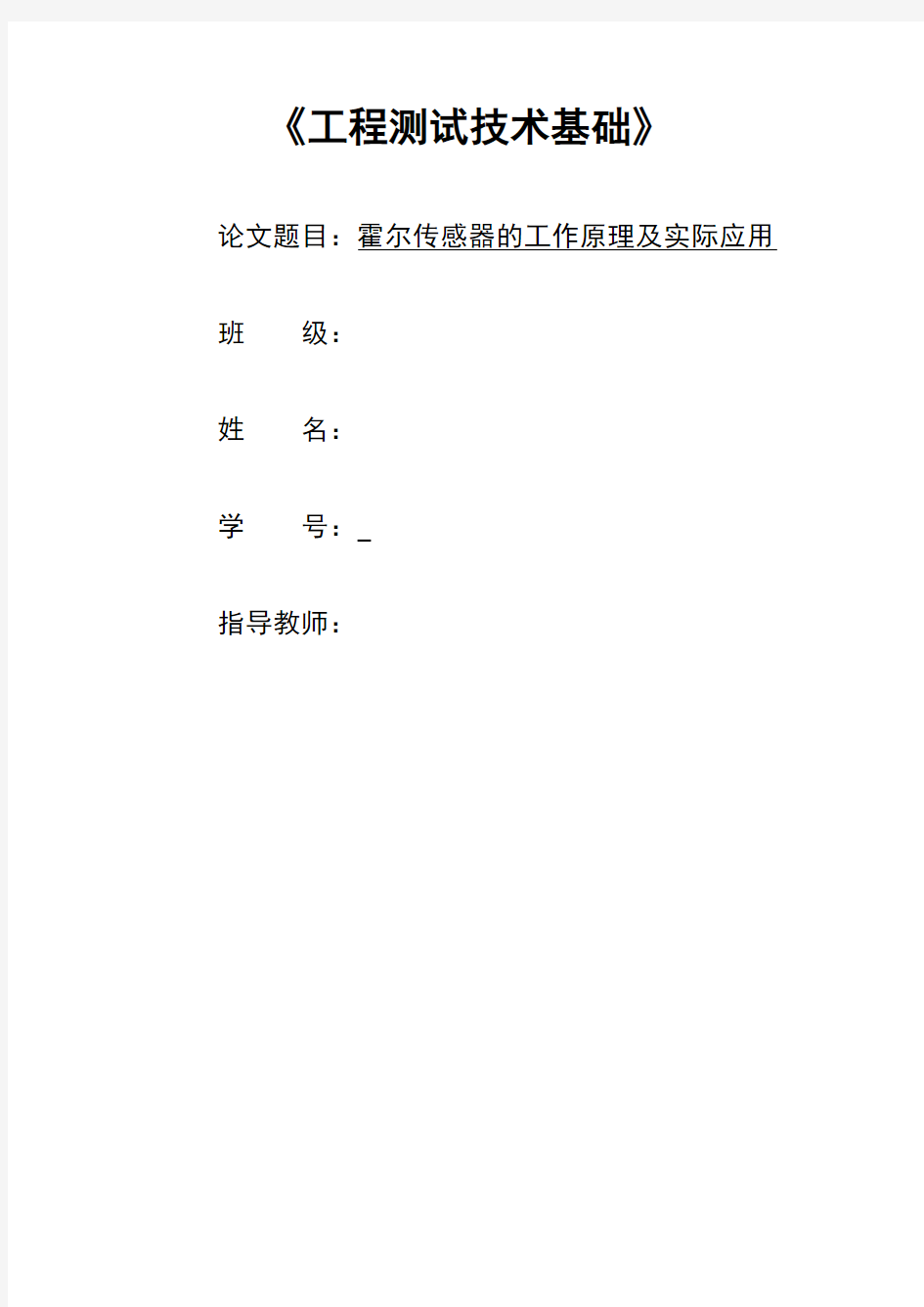
霍尔线性电路, 它由霍尔元件、差分放大器和射极跟随器组成。其输出电压和加在霍尔元件上的磁感强度B 成比例,它的功能框图和输出特性示于图2 和图3。
图 2 霍尔线性电路的功能框图
图 3 霍尔线性电路UGN3501 的磁电转换特性曲线差动霍尔电路(双霍尔电路),它的霍尔电压发生器由一对相距2.5mm 的霍尔元件组成,其功能框图见图6。
图 6 差动霍尔电路的工作原理图
使用时在电路背面放置一块永久磁体,当用铁磁材料制成的齿轮从电路附近转过时,一对霍尔片上产生的霍尔电压相位相反,经差分放大后,使器件灵敏度大为提高。用这种电路制成的汽车齿轮传感器具有极优的性能。
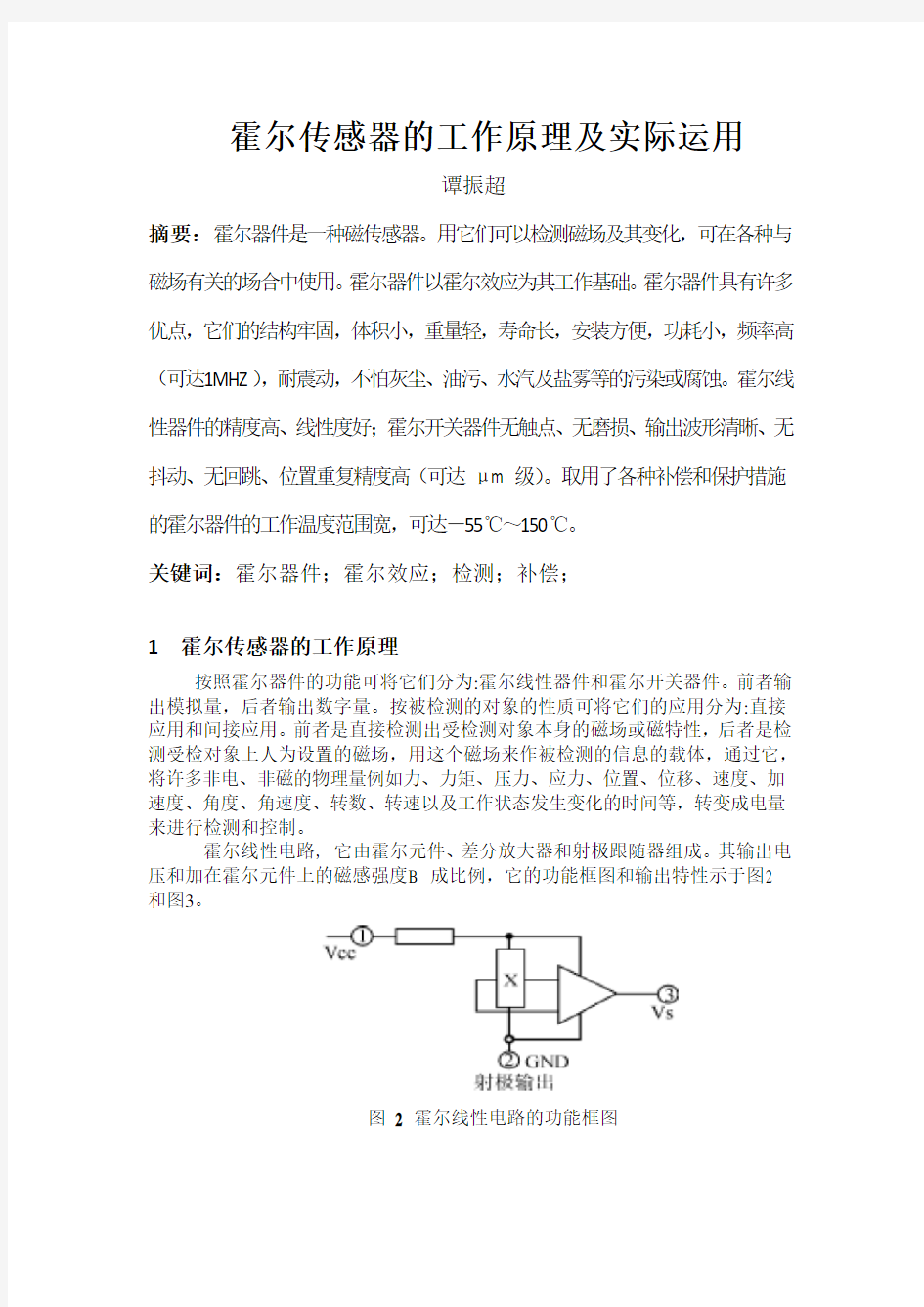
霍尔开关电路又称霍尔数字电路,由稳压器、霍尔片、差分放大器,斯密特触发器和输出级组成。由霍尔效应原理可知, 当霍尔片处于磁场中, 并在垂直于磁场的方向上通以电流时, 霍尔片上与电流和磁场垂直的方向上将会有霍尔电势差V H= K B I输出. 当通过霍尔片的电流恒定不变时, 改变磁场的大小, 可以改变霍尔电势差V H.开关型霍尔传感器由稳压器A、硅霍尔片B、差分放大器C、
施密特触发器D和OC门输出E 五部分组成, 如图1 所示. 从输入端1 输入电压VCC, 经稳压器A 稳压后加在硅霍尔片B的两端, 以提供恒定不变的工作电流. 在垂直于霍尔片的感应面方向施加磁场, 产生霍尔电势差V H,该V H信号经差分放大器C放大后送至施密特触发器 D 整形. 当磁场达到“工作点”( 即Bop) 时, 触发器D 输出高电压( 相对于地电位) , 使三极管E导通, 输出端V o输出低电位,此状态称为“开”.
图1开关型霍尔传感器构成
当施加的磁场达到“释放点”( 即Brp) 时, 触发器 D 输出低电压, 使三极管E截止, 输出端V o 输出高电位, 此状态称为“关”.这样 2 次高低电位变换, 使霍尔传感器完成了1 次开关动作. 如图 2 所示. Bop- B rp称为磁滞.在此差值内, 输出电位Vo保持高电位或低电位不变, 因而输出稳定可靠.
图2开关型霍尔传感器输出电压与外加磁感应强度关系
2 霍尔传感器测量的物理量及应用范围
霍尔元件可以测量磁物理量及电量,还可以通过转换测量其他非电量。
霍尔元件在工程技术上的应用相当广泛,如测量技术、无线电技术、计算机技术及自动控制技术等。具体的应用产品有高斯计在、霍尔逻盘、大电流计、功率计、调制器、位移传感器、微波功率计、频率倍增器、回转器、乘法器、磁带或磁鼓读出器以及霍尔马达等。
3 开关型霍尔传感器的工程实现
开关型霍尔传感器的设计方案很多, 这里提供一种工程上实用的实施方案.
3. 1元件的选择与确定
硅霍尔片灵敏度K = 21. 7mV/ ( mA·T ) ,工作电流的范围为0~10mA, 本文将工作电流定为4mA.选用的磁钢是直径为D-= 11. 812m m,厚度为h-= 3. 806mm 的钕铁硼.选用的施密特触发器为CD40106( 六反相器) . 当电源电压为VCC= 15V 时, 触发器正触发的阈值电压为8. 3V, 负触发的阈值电压为5. 2V( 实测) .
初步选定霍尔开关的“工作点”为Bop=70mT ,此时磁钢与霍尔片的距离为r =4. 2m m. 根据霍尔效应原理, 当Bop= 70mT 时,霍尔电势差为VH= 6. 1mV. 若要使D 触发器输出转换为高电平, 它的输入要大于8. 3V,要将V H放大 1 360 倍以上. 由此增益推出, 若要使 D 触发器输出转换为低电平, 它的输入要小于5. 2V, 对应的VH 小于 3. 8mV, “释放点”为B rp= 44mT ,此时磁钢与霍尔片的距离为r =5. 4m m.硅霍尔片提供的差模直流信号V H放大后要用单端方式输出, 虽然它的差模信号只有几m V, 但是共模噪声可高达几V, 且差模信号的放大倍数要求上千倍之高, 因此放大器减小输入漂移、噪声的能力和抑制共模信号的能力等因素对总的精度至关重要. 考虑到上述这些特点, 若采用单级放大, 一个微小的扰动都会使输出达到饱和, 而且单级放大倍数过大容易引起线路自激振荡, 同时降低频带宽度. 通过对多种方案的试验、比较, 我们认为应该采用多级放大, 本实验中采用的 2 级放大的高输入阻抗差分放大器效果最好.所设计的开关型霍尔传感器的电路如图3所示, 其中: A1~A4 运算放大器全部采用±15V电源.3. 2差分放大器的设计3. 2. 1输入电阻仅使用 2 个放大器的高输入阻抗放大电路如图 3 中的虚线框( 1) 部分, 它是 2 个同相放大器的简单串联组合, 差动输入信号从 2 个放大器的同相端送入, 从而获得很高的输入电阻. 根据运算放大器的理论知识, 由图 3 不难看出, 差动输入电阻几乎就是2个运算放大器的共模输入电阻之和. 当A1, A2 的共模输入电阻rC相等时, 本电路的差动输入电阻可表示为r id≈2rC ( 1)共模输入电阻为r iC ≈12rC ( 2)
3.2差分放大电路的增益
图3开关型霍尔传感器电路图
设V P = 0,图3中的A2是同相比例运算放大器, 它的输出电压为
(3)
A1 是双端输入比例运算放大器, 它的输出电压为
因为在实际应用中, 输入端除了差动输入电压VH外, 还有共模输入电压V iC, 因此输入端的信号可以表示为
把( 5) 式代入( 4) 式整理后得
为了使共模增益为零, 显然, 电路的外部回路电阻应按下式匹配
(7)
可选择R 5= R 6, R 4= R7, R2= R3.这样理想的差分放大电路增益为
在实验过程中发现, 各类差动放大电路都有零位输出, 且很难通过运放本身调零, 这就影响了实验的准确性. 因此为第1级放大电路设计了外部调零线路, 如图 3 的虚线框( 2) 部分.在进行外部调零时, Vi1, V i2均为零. 当电位计P1的中点滑到A 点时, 有
滑到B点时, 有
设计要求R 8= R10, R9= R11,则V B = - V A .这样电位计P1上的电压V P可在V B与V A之间调节. 当输入V i1, V i2为零时, 通过调节P 1,使得V o1= 0.甚至如果只要求输入为零时, 使V o4= 0也可以达到.
电路中运放采用的是双电源制, 这样, 对钕铁硼的极性不做要求时, 对应的差动放大器的输出就可以为正或负. 因此, 第 2 级放大采用的是绝对值电路, 如图3 的虚线框( 3) 部分, 设计要求R 12= R 13= R14= 2R 16= R .当V o1> 0时,D2导通, 有这样, 无论钕铁硼的N 极还是S 极与霍尔片相对, 第 2 级运放均输出正电压, 以便控制D触发器和OC门的正常工作. 其增益为A 2=R /17R.
4结果与分析
通过选配电阻, 再经过外部调零, 使得第1级的放大倍数为A 1= 342,第2 级的放大倍数为A 2= 4,总的放大倍数为A = A 1*A 2= 1 368.在不同外部条件下进行测量, 其稳定性高, 与理论值符合性好, 输出的高、低电位转换点可靠, 稳定。
该设计线路的优越性在于:
1) 由2 个运放组成的差动放大电路的精度高, 且与由3 个运放组成的差动放大电路相比,性价比较好;
2) 可靠的外部调零线路保证了输出的准确性;
3) 绝对值放大电路使得测量时不需要进行磁极判断.通过本实验的设计与完成, 使学生进一步了解了物理原理在其他领域的应用, 同时也看到将理论应用到工程实践中去, 还需要具备很多其他学科的知识, 还需要在工程实践中不断总结经验.
5某一霍尔传感器技术指标及参考价格、生产厂家
M18-HR-10K霍尔传感器
价格92元
上海新创电气厂
技术参数:
1.工作电压:5---24VDC
2.消耗电流:≤25mA
3.动作距离:≤3mm
4.输出方式:PNP
5..输出信号:脉冲信号
6.负载电流:≤200mA
7.响应频率:≤10KHz
8.信号线:三线制
9.引线长度:1米
10.环境温度:-15℃-75℃
11.外形:圆柱形
12.安装方式:螺丝安装
13.外形规格:M18*70
14.外壳材料:镍铜合金
15.防护等级:IP67
16.接线图:
17.信号图示:
6霍尔传感器的优缺点及改进措施
优点:1、灵敏度较高,2、体积很小,便于制成特殊规格的探头,例如只有零点几毫米厚的磁场强度仪
缺点及改进措施:1、互换性差,信号随温度变化,非线性输出,最好用单
片机进行非线性和温度校正。
2、使用中当大的直流电流流过传感器原边线圈,且次级电路没有接通电源稳压器或副边开路,则其磁路被磁化,而产生剩磁,影响测量精度(故使用时要先接通电源和测量端M),发生这种情况时,要先进行退磁处理。其方法是次边电路不加电源,而在原边线圈中通一同样等级大小的交流电流并逐渐减小其值。
3、霍尔传感器都具有较强的抗外磁场干扰能力,但是,为了获得较高的测量准确度,当有较强的磁场干扰时,要采取适当的措施来解决。通常方法有:调整模块方向,使外磁场对模块的影响最小;在模块上加罩一个抗磁场的金属屏蔽罩
参考文献:[ 1] 何希才. 传感器及其应用电路[ M ] . 北京: 电子工业出
版社, 2001. 100~108.[ 2] 焦丽凤. 集成开关型霍尔传感器在测量物体转动惯量中的应用[J]. 实验室探索与研究, 2000( 5) :57.[ 3] 焦丽凤. 用集成开关型霍尔传感器测定弹簧的劲度系数[ J] . 物理实验, 2000, 20(11): 45~46.[ 4] 荣格W G . 集成运算放大器应用手册[ M ] . 张熠中, 姚朝亮译. 北京: 世界图书出版公司, 1990.
原文已完。下文为附加文档,如不需要,下载后可以编辑删除,谢谢!
施工组织设计
本施工组织设计是本着“一流的质量、一流的工期、科学管理”来进行编制的。编制时,我公司技术发展部、质检科以及项目部经过精心研究、合理组织、充分利用先进工艺,特制定本施工组织设计。
一、工程概况:
西夏建材城生活区27#、30#住宅楼位于银川市新市区,橡胶厂对面。
本工程由宁夏燕宝房地产开发有限公司开发,银川市规划建筑设计院设计。
本工程耐火等级二级,屋面防水等级三级,地震防烈度为8度,设计使用年限50年。
本工程建筑面积:27#楼3824.75m2;30#楼3824.75 m2。室内地坪±0.00以绝对标高1110.5 m为准,总长27#楼47.28m;30#楼47.28 m。总宽27#楼14.26m;30#楼14.26 m。设计室外地坪至檐口高度18.6 00m,呈长方形布置,东西向,三个单元。
本工程设计屋面为坡屋面防水采用防水涂料。外墙水泥砂浆抹面,外刷浅灰色墙漆。内墙面除卫生间200×300瓷砖,高到顶外,其余均水泥砂桨罩面,刮二遍腻子;楼梯间内墙采用50
厚胶粉聚苯颗粒保温。地面除卫生间200×200防滑地砖,楼梯间50厚细石砼1:1水泥砂浆压光外,其余均采用50厚豆石砼毛地面。楼梯间单元门采用楼宇对讲门,卧室门、卫生间门采用木门,进户门采用保温防盗门。本工程窗均采用塑钢单框双玻窗,开启窗均加纱扇。本工程设计为节能型住宅,外墙均贴保温板。
本工程设计为砖混结构,共六层。基础采用C30钢筋砼条形基础,上砌MU30毛石基础,砂浆采用M10水泥砂浆。一、二、三、四层墙体采用M10混合砂浆砌筑MU15多孔砖;五层以上采用M7.5混合砂浆砌筑MU15多孔砖。
本工程结构中使用主要材料:钢材:I级钢,II级钢;砼:基础垫层C10,基础底板、地圈梁、基础构造柱均采用C30,其余均C20。
本工程设计给水管采用PPR塑料管,热熔连接;排水管采用UPVC硬聚氯乙烯管,粘接;给水管道安装除立管及安装IC卡水表的管段明设计外,其余均暗设。
本工程设计采暖为钢制高频焊翅片管散热器。
本工程设计照明电源采用BV-2.5铜芯线,插座电源等采用BV-4铜芯线;除客厅为吸顶灯外,其余均采用座灯。
二、施工部署及进度计划
1、工期安排
本工程合同计划开工日期:2004年8月21日,竣工日期:2005年7月10日,合同工期315天。计划2004年9月15日前
完成基础工程,2004年12月30日完成主体结构工程,2005年6月20日完成装修工种,安装工程穿插进行,于2005年7月1日前完成。具体进度计划详见附图-1(施工进度计划)。
2、施工顺序
⑴基础工程
工程定位线(验线)→挖坑→钎探(验坑)→砂砾垫层的施工→基础砼垫层→刷环保沥青→基础放线(预检)→砼条形基础→刷环保沥青→毛石基础的砌筑→构造柱砼→地圈梁→地沟→回填工。
⑵结构工程
结构定位放线(预检)→构造柱钢筋绑扎、定位(隐检)→砖墙砌筑(+50cm线找平、预检)→柱梁、顶板支模(预检)→梁板钢筋绑扎(隐检、开盘申请)→砼浇筑→下一层结构定位放线→重复上述施工工序直至顶。
⑶内装修工程
门窗框安装→室内墙面抹灰→楼地面→门窗安装、油漆→五金安装、内部清理→通水通电、竣工。
⑷外装修工程
外装修工程遵循先上后下原则,屋面工程(包括烟道、透气孔、压顶、找平层)结束后,进行大面积装饰,塑钢门窗在装修中逐步插入。
三、施工准备
1、现场道路
本工程北靠北京西路,南临规划道路,交通较为方便。
场内道路采用级配砂石铺垫,压路机压。
2、机械准备
⑴设2台搅拌机,2台水泵。
⑵现场设钢筋切断机1台,调直机1台,电焊机2台,1
台对焊机。
⑶现场设木工锯,木工刨各1台。
⑷回填期间设打夯机2台。
⑸现场设塔吊2台。
3、施工用电
施工用电已由建设单位引入现场;根据工程特点,设总配电箱1个,塔吊、搅抖站、搅拌机、切断机、调直机、对焊机、木工棚、楼层用电、生活区各配置配电箱1个;电源均采用三相五线制;各分支均采用钢管埋地;各种机械均设置接零、接地保护。具体配电箱位置详见总施工平面图。
3、施工用水
施工用水采用深井水自来水,并砌筑一蓄水池进行蓄水。
楼层用水采用钢管焊接给水管,每层留一出水口;给水管不置蓄水池内,由潜水泵进行送水。
4、生活用水
生活用水采用自来水。
5、劳动力安排
⑴结构期间:
瓦工40人;钢筋工15人;木工15人;放线工2人;材料1人;机工4人;电工2人;水暖工2人;架子工8人;电焊工2人;壮工20人。
⑵装修期间
抹灰工60人;木工4人;油工8人;电工6人;水暖工10人。
四、主要施工方法
1、施工测量放线
⑴施工测量基本要求
A、西夏建材城生活区17#、30#住宅楼定位依据:西夏建材城生活区工程总体规划图,北京路、规划道路永久性定位
B、根据工程特点及<建筑工程施工测量规程>DBI01-21-95,4、3、2条,此工程设置精度等级为二级,测角中误差±12,边长相对误差1/15000。
C、根据施工组织设计中进度控制测量工作进度,明确对工程服务,对工程进度负责的工作目的。
⑵工程定位
A、根据工程特点,平面布置和定位原则,设置一横一纵两条主控线即27#楼:(A)轴线和(1)轴线;30#楼:(A)轴线和(1)轴线。根据主轴线设置两条次轴线即27#楼:(H)轴
线和(27)轴线;30#楼:(H)轴线和(27)轴线。
B、主、次控轴线定位时均布置引桩,引桩采用木桩,后砌一水泥砂浆砖墩;并将轴线标注在四周永久性建筑物或构造物上,施测完成后报建设单位、监理单位确认后另以妥善保护。
C、控轴线沿结构逐层弹在墙上,用以控制楼层定位。
D、水准点:建设单位给定准点,建筑物±0.00相当于绝对标高1110.500m。
⑶基础测量
A、在开挖前,基坑根据平面布置,轴线控制桩为基准定出基坑长、宽度,作为拉小线的依据;根据结构要求,条基外侧1100mm为砂砾垫层边,考虑放坡,撒上白灰线,进行开挖。
B、在垫层上进行基础定位放线前,以建筑物平面控制线为准,校测建筑物轴线控制桩无误后,再用经纬仪以正倒镜挑直法直接投测各轴线。
C、标高由水准点引测至坑底。
⑷结构施工测量
A、首层放线验收后,主控轴一引至外墙立面上,作为以上务层主轴线竖身高以测的基准。
B、施工层放线时,应在结构平面上校投测轴线,闭合后再测设细部尺寸和边线。
C、标高竖向传递设置3个标高点,以其平均点引测水平线折平时,尽量将水准仪安置在测点范围内中心位置,进行测
设。
2、基坑开挖
本工种设计地基换工,夯填砂砾垫层1100mm;根据此特点,采用机械大开挖,留200mm厚进行挖工、铲平。
开挖时,根据现场实际土质,按规范要求1:0.33放坡,反铲挖掘机挖土。开挖出的土,根据现场实际情况,尽量留足需用的好土,多余土方挖出,避免二次搬运。
人工开挖时,由技术员抄平好水平控制小木桩,用方铲铲平。
挖掘机挖土应该从上而下施工,禁止采用挖空底脚的操作方法。机械挖土,先发出信号,挖土的时候,挖掘机操作范围内,不许进行其他工作,装土的时候,任何人都不能停留在装土车上。
3、砌筑工程
⑴材料
砖:MU15多孔砖,毛石基础采用MU30毛石。
砂浆:±0.00以下采用M10水泥砂浆,一、二、三、四层采用M10混合砂浆,五层以上采用M7.5混合砂浆。
⑵砌筑要求
A、开工前由工长对所管辖班组下发技术交底。
B、砌筑前应提前浇水湿润砖块,水率保持在10%-15%。
C、砌筑采用满铺满挤“三一砌筑法“,要求灰浆饱满,
灰缝8-12mm。
D、外墙转角处应同时砌筑,内外墙交接处必须留斜槎,槎子长度不小于墙体高度的2/3,槎子必须平直、通顺。
E、隔墙与墙不同时砌筑又不留成斜槎时可于墙中引出阳槎或在墙的灰缝中预埋拉结筋,每道不少于2根。
F、接槎时必须将表面清理干净,浇水湿润,填实砂浆,保持灰缝平直。
G、砖墙按图纸要求每50mm设置2φ6钢筋与构造柱拉结,具体要求见结构总说明。
H、施工时需留置临时洞口,其侧边离交接处的墙面不少于500mm,顶部设边梁。
4、钢筋工程
⑴凡进场钢筋须具备材质证明,原材料须取样试验,经复试合格后方可使用。
⑵钢筋绑扎前应仔细对照图纸进行翻样,根据翻样配料,施工前由工长对所管辖班组下发技术交底,准备施工工具,做好施工的准备工作。
⑶板中受力钢筋搭接,I级钢30d,II级钢40d,搭接位置:上部钢筋在跨中1/3范围内,下部钢筋在支座1/3范围内。
⑷钢筋保护层:基础40mm,柱、梁30mm,板20mm。保护层采用50mm×50mm的水泥砂浆块。板上部钢筋用马凳按梅花状支起。
⑸所有钢筋绑扎,须填写隐检记录,质评资料及目检记录,验收合格后方可进行下道工序。
5、砼工程
⑴水泥进场后须做复试,经复试合格后由试验室下达配合比。施工中严格掌握各种材料的用量,并在搅拌机前进行标识,注明每立方米、每盘用量。同时搅拌时,须车车进磅,做好记录。
⑵浇筑前,对模板内杂物及油污、泥土清理干净。
⑶投料顺序:石子→水泥→砂子。
⑷本工程均采用插入式振捣器,一次浇筑厚度不宜超过振捣器作用部分长度的1.25倍,捣实砼的移动间距不宜大于振捣器作用半径的1.5倍。
⑸砼浇筑后1昼夜浇水养护,养护期不少于7d,砼强度未达到1.2MP a之前不得上人作业。
6、模板工程
⑴本工程模板采用钢木混合模板。模板支搭的标高、截面尺寸、平整度、垂直度应达到质量验收标准,以满足其钢度,稳定性要求。
⑵模板支撑应牢固可靠,安装进程中须有防倾覆的临时固定措施。
⑶本工程选用851脱模剂,每拆除一次模板经清理后涂刷脱模剂,再重新组装,以保证砼的外观质量。
6、架子工程
⑴本工程采用双排架子防护,外设立杆距墙2m,里皮距墙50cm,立杆间距1.5m,顺水间距1.2m,间距不大于1m。
⑵架子底部夯实,垫木板,绑扫地杆。
⑶为加强架子的稳定性,每七根立杆间设十字盖,斜杆与地面夹角60o。
⑷为防止脚平架外倾,与结构采用钢性拉接,拉接点间距附和“垂四平六“的原则。
⑸外防护架用闭目式安全网进行封闭,两平网塔接和网下口必须绑孔紧密。
⑹结构架子高出作业层1m,每步架子满铺脚手板,要求严密牢固并严禁探头板。
7、装饰工程
装饰工程施工前,要组织质监部门、建设、设计、施工单位四方参加的主体结构工程核验收,对已完全体分部工程进行全面检查、发现问题及时处理,清除隐患,并做好装饰前材料、机具及技术准备工作。
1、根据预算所需材料数量,提出材料进场日期,在不影响施工用料的原则下,尽量减少施工用地,按照供料计划分期分批组织材料进场。
2、将墙面找方垂直线,清理基层,然后冲筋,按照图纸要求,分层找平垂直,阴阳角度方正,然后拉线作灰饼。底子
灰应粘结牢固,并用刮杠刮平,木抹子抹平。
3、罩面应均匀一致,并应在终凝前刮平压光,上三遍灰抹子。
4、油漆、涂料施工:
油漆工程施工时,施工环境应清洁干净,待抹灰、楼地面工程全部完工后方可施工,油漆涂刷前被涂物的表面必须干燥、清洁,刷漆时要多刷多理不流坠,达到薄厚均匀,色调一致,表面光亮。
墙面涂料基层要求现整,对缝隙微小孔洞,要用腻子找平,并用砂纸磨平。
为了使颜色一致,应使用同一配合比的涂料,使用时涂料搅匀,方可涂刷,接槎外留在阴阳角外必须保证涂层均匀一致表面不显刷纹。
8、楼地面工程
楼地面工程只作50厚豆石砼垫层。
做垫层必须先冲筋后做垫层,其平整度要控制在4mm以内,加强养护4-5天后,才能进行上层施工。
10、层面工程
1、屋面保温层及找平层必须符合设计要求,防水采用防水卷材。
2、做水泥砂浆找平层表面应平整压光,屋面与女儿墙交接处抹成R≥150mm圆角。
传感器原理及工程应用(论文) 霍尔传感器应用测速方面 学生姓名: 指导教师: 专业: 学号: 2011 年12 月
目录 前言 (1) 1绪论 (1) 1.1脉冲信号的获得 (1) 1.2方案分析论证 (2) 1.3单片机模块论证与选择 (2) 1.4显示模块论证与选择 (2) 1.5报警模块论证与选择 (3) 1.6电源模块论证与选择 (3) 2 基于霍尔传感器的电机转速测量系统硬件设计 (4) 2.1总体硬件设计 (4) 2.2系统电路设计 (5) 2.3霍尔传感器测量电路设计 (5) 2.4霍尔传感器测量原理 (6) 2.5转速测量方法 (7) 2.6反相器74LS14 (7) 2.7光电耦合器 (8) 2.8蜂鸣器 (9) 结论 (10) 参考文献 (11)
前言 测速是工农业生产中经常遇到的问题,学会使用单片机技术设计测速仪表具有很重要的意义。要测速,首先要解决是采样的问题。在使用模拟技术制作测速表时,常用测速发电机的方法,即将测速发电机的转轴与待测轴相连,测速发电机的电压高低反映了转速的高低。 使用单片机进行测速,可以使用简单的脉冲计数法。只要转轴每旋转一周,产生一个或固定的多个脉冲,并将脉冲送入单片机中进行计数,即可获得转速的信息。在直流电机的多年实际运行的过程中,机械测速电机不足之处日益明显,其主要表现为直流测速电机DG中的炭刷磨损及交流测速发电机TG中的轴承磨损,增加了设备的维护工作量,也随着增加了发生故障的可能性;同时机械测速电机在更换炭刷及轴承的检修作业过程中,需要将直流电动机停运,安装过程中需要调整机械测速电机轴与主电机轴的同轴度,延长了检修时间,影响了设备的长期平稳运行。 随着电力电子技术的不断发展,一些新颖器件的不断涌现,原有器件的性能也随着逐渐改进,采用电力电子器件构成的各种电力电子电路的应用范围与日俱增。因此采用电子脉冲测速取代原直流电动机械测速电机已具备理论基础,如可采用磁阻式、霍尔效应式、光电式等方式检测电机转速。 经过比较分析后,决定采用测速齿轮和霍尔元件代替原来的机械测速电机。霍尔传感器作为测速器件得到广泛应用。霍尔传感器是利用霍尔效应实现磁电转换的一种传感器。霍尔效应这种物理现象的发现,虽然已有一百多年的历史,但是直到20世纪40年代后期,由于半导体工艺的不断改进,才被人们所重视和应用。我国从70年代开始研究霍尔器件,经过20余年的研究和开发,目前已经能生产各种性能的霍尔元件,霍尔传感器具有灵敏度高、线性度好、稳定性高、体积小和耐高温等特点[2]
毕业设计 设计题目:传感器电路设计
目录 1. 引言 1 2. 溶解氧传感器简介 1 3.信号输入部分电路 4 3.1 电源滤波电路图 4 3.2 信号放大电路 5 3.2.1信号放大电路图 5 3.3 AD623放大器简介 6 3.3.1AD623放大器的特点 6 3.3.2AD623放大器的工作原理 6 4 单片机电路7 4.1 单片机电源电路图8 4.2 89LPC925芯片简介8 4.2.1 P89PLC925芯片主要功能8 4.2.2 P89PLC925的低功耗选择11 4.2.3 P89PLC925的极限参数11 4.2.4 P89PLC925芯片管脚图11 5.MiniICP下载线的电路连接13 6.PCB板的绘制13 7.程序流程14 8. 总结16 参考文献16
传感器电路设计 摘要:溶解氧数字化传感器是应用单片机控制的智能化传感器,它可以对液体中溶解氧 的含量进行准确的测量。本设计从总体上介绍了溶解氧数字化传感器的工作原理,着重介 绍了电路元器件的选取以及输入信号的放大和P89LPC925芯片的工作原理,利用P89LPC925 芯片实现对溶解氧浓度的准确测量。 关键词:溶解氧传感器;P89LPC925;AD623 The design of the dissolved oxygen sensor (College of Physics and Electronic Engineering, Electrical Engineering and Its Automation, Class2 Grade2003, 0323110235) Abstract:Dissolved oxygen digital sensor is a king of intelligent sensor which use single-chip computer to control, it could measure the oxygen dissolved in liquid accurately. This design introduces the work principle of dissolved oxygen digital sensor, it introduces the selection of the circuit components and amplification of input signals and the work principle of P89LPC925 chip, P89LPC925 chip using the dissolved oxygen concentration on the measurement accuracy. Key Words: dissolved oxygen sensor; P89LPC925; AD623 1 引言 氧是维持人类生命活动必不可少的物质,它与人类的生存息息相关。氧也是与化学、生化反应、物理现象最密切的一种化学元素,无论是在工业、农业、能源、交通、医疗、生态环境等各个方面都有重要作用。特别是在水产养殖中,水体溶解氧对水中生物如鱼类的生存有着至关重要的影响。缺溶氧(溶解氧低于4mg/L)时将导致水生物窒息死亡;低溶氧导致水生物生长缓慢,增重率低而饵料系数高,对疾病的抵抗能力发病率高,生物的生长受到限制;高溶氧时某些鱼类幼体可能会出现气泡病。因此溶解氧浓度的精确测量显得尤为重要。 2 溶解氧传感器简介 溶解氧是溶解在水中的分子态氧,该定义是可查资料[1]-[4],随着科技和经济的发展,溶解氧测量已从水介质延伸到了非水液体介质,如丙酮、苯、氯苯、环乙烷、甲醇、正辛烷。分布方式有水平分布和垂直分布两种.溶解氧的一个来源是水中溶解氧未饱和时,大气中的氧气向水体渗入;另一个来源是水中植物通过光合作用释放出的氧。溶解氧随着温度、气压、盐分的变化而变化,一般说来,温度越高,溶解的盐分越大,水中的溶解氧越低;气压越高,水中的溶解氧越高。
半导体薄片置于磁感应强度为 B 的磁场中,磁场方向垂直于薄片,如图所示。当有电流 I 流过薄片时,在垂直于电流和磁场的方向上将产生电动势 EH ,这种现象称为霍尔效应,该电动势称为霍尔电势,上述半导体薄片称为霍尔元件。 原理简述如下:激励电流 I 从 a 、 b 端流入,磁场 B 由正上方作用于薄片,这时电子 e 的运动方向与电流方向相反,将受到洛仑兹力 FL 的作用,向内侧偏移,该侧形成电子的堆积,从而在薄片的 c 、 d 方向产生电场 E 。电子积累得越多, FE 也越大,在半导体薄片 c 、 d 方向的端面之间建立的电动势 EH 就是霍尔电势。 由图可以看出,流入激励电流端的电流 I 越大、作用在薄片上的磁场强度B 越强,霍尔电势也就越高。磁场方向相反,霍尔电势的方向也随之改变,因此霍尔传感器能用于测量静态磁场或交变磁场。 半导体薄片置于磁感应强度为 B 的磁场中,磁场方向垂直于薄片,如图所示。当有电流 I 流过薄片时,在垂直于电流和磁场的方向上将产生电动势 EH ,这种现象称为霍尔效应,该电动势称为霍尔电势,上述半导体薄片称为霍尔元件。 原理简述如下:激励电流 I 从 a 、 b 端流入,磁场 B 由正上方作用于薄片,这时电子 e 的运动方向与电流方向相反,将受到洛仑兹力 FL 的作用,向内侧偏移,该侧形成电子的堆积,从而在薄片的 c 、 d 方向产生电场 E 。电子积累得越多, FE 也越大,在半导体薄片 c 、 d 方向的端面之间建立的电动势 EH 就是霍尔电势。 由图可以看出,流入激励电流端的电流 I 越大、作用在薄片上的磁场强度B 越强,霍尔电势也就越高。磁场方向相反,霍尔电势的方向也随之改变,因此霍尔传感器能用于测量静态磁场或交变磁场。
传感器与测控电路课程设计报告学生姓名:禹振榜 指导老师:杨书仪余以道 专业班级:12级测控二班 所在学院:机电工程学院 学号1203030214 课题基于单片机的霍尔测速报警系统
基于单片机的霍尔测速报警系统的设计 摘要 在生产中,电机应用十分广泛,比如汽车速度显示,设备工作时的档位,都需要我们了解电机或者机器的转速。转速作为工程中应用的一个非常广泛的参数,它的测量方法有很多,特别是单片机对脉冲数字信号的强大处理能力,使得全数字测量系统越来越普及,越来越方便。 本设计属于码盘转速测量系统,实现转速的实时测量和显示。本系统以STC90C51单片机为核心,旋转编码器通过用传感器测量非电量,转变成模拟电量,再通过一系列测控电路。获得数字信号,实现实时轴转速测量,同时用四位段码式LED数码管显示模块显示电机转速,并且加入了报警模块。详细阐述了转速测量系统的工作过程,以及硬件电路的设计、显示效果。本文吸收了硬件软件化的思想,实现了题目要求的功能。 关键词:转速测量,,单片机, LED显示模块,霍尔传感器。
目录 第一部分绪论 1.1 设计的任务与要求————————————————1 第二部分功能分析与设计要求 2.1 测控系统功能的概述———————————————1 2.2系统模块的确定————————————————— 2 2.3各模块的选择—————————————————— 2 2.1.1传感器模块的论证与选择——————————————2 2.1.2报警模块的论证与选择———————————————3 2.1.3显示模块的论证与选择———————————————3 2.1.2单片机模块的论证与选择——————————————3 2.4 小结——————————————————————3 第三部分测控系统的总体设计 3.1 测控系统的总体设计———————————————4 3.1.1 硬件原理图———————————————————4 3.1.2 硬件电路设计总图————————————————5 3.2 测控系统子模块简介———————————————5 3.2.1传感器原理及分电路析—————————————— 5 3.2.2 报警模块————————————————————7 3.2.3 LED数码管———————————————————8
目录 一.概述 (1) 二.生物传感器的基本原理、分类及特点 (1) 1.生物传感器的基本原理 (1) 2.生物传感器的分类 (1) 3.生物传感器的特点 (1) 三.几种典型的生物传感器 (2) 1.酶传感器 (2) 2.微生物传感器 (2) (1)呼吸机能型微生物传感器 (3) (2)代谢机能型微生物传感器 (3) 3.免疫传感器 (3) 4.生物组织传感器 (4) 5.半导体生物传感器 (4) (1)酶光敏二极管 (5) (2)酶FET (5) 四.生物传感器应用 (5) 五.生物传感器发展前景 (6) 参考文献 (8)
一.概述 20世纪70年代以来,生物医学工程迅猛发展,作为检测生物体内化学成分的各种生物传感器的不断出现。60年代中期起,首先利用酶的催化作用和它的催化专一性开发了酶传感器,并达到实用阶段。70年代又研制出微生物传感器、免疫传感器等。80年代以来,生物传感器的概念得到公认,作为传感器的一个分支它从化学传感器中独立出来,并且得到了发展,使生物工程与半导体技术相结合,进入了生物电子学传感器时代。生物传感器在发酵工艺、环境检测、食品工程、临床医学、军事及军事医学等方面得到了深度重视和广泛应用。随着社会的进一步信息化,生物传感器必将获得越来越广泛的应用。 二.生物传感器的基本原理、分类及特点 1.生物传感器的基本原理 生物传感器的基本原理是待测物质与分子识别原件特异性结合,发生生物化学反应,产生的生物学信息通过信号转换器转化为可以定量转化的电、光等信号,再经仪表放大和输出,从而达到分析检测的目的。生物传感器由固定化的生物敏感材料作识别元件(包括酶、抗体、抗原、微生物、细胞、组织、核酸等物质)。 2.生物传感器的分类 1.根据生物传感器中分子识别即敏感元件可分为五类:酶传感器,微生物传感器,细胞传感器,组织传感器和免疫传感器。显而易见,所应用的敏感材料依次为酶、微生物个体、细胞器、动植物组织、抗原和抗体。 2.根据生物传感器的换能器即信号转换器分类有:生物电极传感器,半导体生物传感器,光生物传感器,热生物传感器,压电晶体生物传感器等,换能器依次为电化学电极、半导体、光电转换器、热敏电阻、压电晶体等。 3.以被测目标与分子识别元件的相互作用方式进行分类有生物亲合型生物传感器。 3.生物传感器的特点 1.采用固定化生物活性物质作催化剂,价值昂贵的试剂可以重复多次使用,
霍尔式传感器应用论文 学生姓名: 指导教师:孟洁 所在学院:信息技术学院 专业:电气工程及其自动化 中国·大庆 2011 年 5 月
目录 1引言 (3) 2系统设计 (3) 2.1霍尔传感器 (4) 2.2高频滤波电路 (5) 2.3差分运算放大器 (5) 2.4比较器 (5) 2.5断弧提升器 (5) 2.6模拟开关手动自动转换器 (6) 2.7定位起弧电路 (6) 2.2高频滤波电路 (7) 2.3差分运算放大器 (7) 2.4比较器 (7) 2.5断弧提升器 (7) 2.6模拟开关手动自动转换器 (7) 2.7定位起弧电路 (8) 2.8可变占空比产生器 (8) 2.9光电耦合与电机驱动电路 (8) 3割炬定位结构系统图 (10) 结束语 (18)
1引言 等离子自动高低调节器是切割机中必不可少的配套设备,广泛应用于大型装备制造、造船和切割等领域,其主要功能是保证切割割炬与被切割工件保持最佳切割距离,消除由被切割工件的不平度变化引起的加工精度误差。切割机在工作过程中不能准确获取切割割炬与钢板的距离,这就必然影响钢板的切割质量。切割的弧电流强光会给操作人员造成视觉疲劳。因此,给出了一种基于霍尔传感器的设计方案,保证切割过程中割缝宽度均匀,切割精度提高。 2系统设计 该设计方案利用霍尔效应原理产生随磁场变化而产生变化的电压,把变化的电压送到自动高低调节器,控制割炬的上升与下降,形成一个闭环的自动高低调节系统,如图1所示。该闭环自动控制系统由霍尔传感器、自检器、高频滤波器、运算放大器、比较器、断弧提升器、模拟开关手动自动转换器、光电耦合器、三态门互锁器、电机驱动器以及机械丝杆传递定位系统组成。图2所示是系统控制电路图,从而能在切割过程中实时控制割炬与钢板的距离,有效保证钢板的切割质量。
一、霍尔电流电压传感器、变送器的基本原理与使用方法 1.霍尔器件 霍尔器件是一种采用半导体材料制成的磁电转换器件。如果在输入端通入控 制电流I C ,当有一磁场B穿过该器件感磁面,则在输出端出现霍尔电势V H 。 如图1-1所示。 霍尔电势V H 的大小与控制电流I C 和磁通密度B的乘积成正比,即:V H =K H I C Bsin Θ 霍尔电流传感器是按照安培定律原理做成,即在载流导体周围产生一正比于该电流的磁场,而霍尔器件则用来测量这一磁场。因此,使电流的非接触测量成为可能。 通过测量霍尔电势的大小间接测量载流导体电流的大小。因此,电流传感器经过了电-磁-电的绝缘隔离转换。 2.霍尔直流检测原理 如图1-2所示。由于磁路与霍尔器件的输出具有良好的线性关系,因此霍尔 器件输出的电压讯号U 0可以间接反映出被测电流I 1 的大小,即:I 1 ∝B 1 ∝U 我们把U 0定标为当被测电流I 1 为额定值时,U 等于50mV或100mV。这就制成 霍尔直接检测(无放大)电流传感器。
3.霍尔磁补偿原理 原边主回路有一被测电流I1,将产生磁通Φ1,被副边补偿线圈通过的电流I2所产生的磁通Φ2进行补偿后保持磁平衡状态,霍尔器件则始终处于检测零磁通的作用。所以称为霍尔磁补偿电流传感器。这种先进的原理模式优于直检原理模式,突出的优点是响应时间快和测量精度高,特别适用于弱小电流的检测。霍尔磁补偿原理如图1-3所示。 从图1-3知道:Φ 1=Φ 2 I 1N 1 =I 2 N 2 I 2=N I /N 2 ·I 1 当补偿电流I 2流过测量电阻R M 时,在R M 两端转换成电压。做为传感器测量电 压U 0即:U =I 2 R M 按照霍尔磁补偿原理制成了额定输入从0.01A~500A系列规格的电流传感器。 由于磁补偿式电流传感器必须在磁环上绕成千上万匝的补偿线圈,因而成本增加;其次,工作电流消耗也相应增加;但它却具有直检式不可比拟的较高精度和快速响应等优点。 4.磁补偿式电压传感器 为了测量mA级的小电流,根据Φ 1=I 1 N 1 ,增加N 1 的匝数,同样可以获得高磁 通Φ 1 。采用这种方法制成的小电流传感器不但可以测mA级电流,而且可以测电压。 与电流传感器所不同的是在测量电压时,电压传感器的原边多匝绕组通过串 联一个限流电阻R 1,然后并联连接在被测电压U 1 上,得到与被测电压U 1 成比 例的电流I 1 ,如图1-4所示。
现代检测技术论文 测控11-2班 范国霞 1105070202
绪论 现代技术关于速度的测量方法多种多样,其中包括线速度和角速度两个方面,速度和转速测量在工业农业、国防中有很多应用,如汽车、火车、轮船及飞机等行驶速度测量;发动机、柴油机、风力发电机等输出轴的转速测量等等。其中有微积分转换法,线速度与角速度转换方法,时间位移方法等等,下面我所介绍的是霍尔传感器对于速度的测量方法。霍尔式传感器是基于霍尔效应原理设计的传感器. 关键字:霍尔效应,霍尔传感器
霍尔传感器 霍尔传感器是基于霍尔效应的一种传感器。1879年美国物理学家霍尔首先在金属材料中发现了霍尔效应,但由于金属材料的霍尔效应太弱而没有得到应用,随着半导体技术的发展,开始用半导体材料制成霍尔元件,由于他的霍尔效应显著而得到了应用和发展。在了解霍尔传感器之前先了解一下什么是霍尔元件以及它的基本特性。 霍尔元件的结构很简单,它是由霍尔片、四根引线和壳体组成的,如图1所示。 图1 霍尔片是一块矩形半导体单晶薄片,引出四根引线:1、1ˊ两根引线加激励电压或电流,称激励电极;2、2ˊ引线为霍尔输出引线,称霍尔电极。霍尔元件的壳体是用非到此金属、陶瓷或环氧树脂封装的。在电路中,霍尔元件一般可用两种符号表示,如图1(b)所示。
霍尔元件的基本特性 (1)额定激励电流和最大允许激励电流当霍尔元件自身温度升高10℃所流过的激励电流成为额定激励电流。以元件允许最大温升为限定的激励电流称为最大允许激励电流。因霍尔电势随激励电流增加而线性增加,所以使用中希望选用尽可能大的激励电流,因而需要知道元件的最大允许激励电流。 (2)输入电阻和输出电阻激励电极间的电阻称为输入电阻。霍尔电极输出电势对电路外部来说相当于一个电压源,其电源内阻即为输出电阻。 (3)不等位电势及不等为电阻当霍尔元件的激励电流为I时,若元件所处位置磁感应强度为零,则它的霍尔电势应该为零,但实际不为零。这是测得的空载电势称为不等位电势。 (4)寄生直流电势再外加磁场为零、霍尔元件用交流激励时,霍尔电极输出除了交流不等位电势外,还有一直流电势,称为寄生直流电势。 (5)霍尔电势温度系数在一定磁感应强度和激励电流下温度每变化1℃时,霍尔电势变化的百分率称为霍尔电势温度系数。他同时也是霍尔系数的温度系数。
1引言 1.1 课题的研究背景及意义 振动测试近十多年来发展非常迅速,受到了国内外专家和工业、农业、国防各部门科技工作者的重视。近代工程技术的飞跃发展,特别是航空航天、海洋工程、电力、化工等技术的发展,必须对振动进行预测、采集、并实时处理在运行过程中的载荷数据的响应数据,对大型结构系统进行振动和噪声分析,对可能产生的过大振动事先加以避免或进行控制以确保安全、经济合理。因此,振动测试包括振动、冲击、波动、噪声和各种动态技术(包括试验技术、测试分析技术、计算技术、信号和信息处理技术、自动控制技术、检测和故障诊断技术以及试验设备和材料动力性能等方面)的研究,已越来越在国民经济中发挥重要作用[1]。 振动测量的意义主要有以下两个方面: (1)预防事故、保证人身和设备的安全。预防事故,保证人身和设备的安全是开展设备诊断工作的直接目的和基本任务之一。我们知道,一些设备,特别是流程大型设备一旦发生故障将会引起链锁反应,造成巨大的经济损失,甚至灾难性的后果。因此,为了避免设备事故,保障人身和设备的安全,应当积极发展设备振动诊断。 (2)提高经济效益:开展设备诊断所带来的经济效益包括减少可能发生的事故损失和延长检修周期所节约的维修费用,国外一些调查资料显示,开展设备诊断可带来可观的经济效益。英国曾对2000个工厂作过调查,结果表明,采用设备诊断技术后维修费用每年节约3亿英镑,除去诊断技术的费用0.5亿英镑,净获利2.5亿英镑。在我国的大型电厂,若出现故障其停机一天造成的损失就达一百多万元。因此对设备故障进行有效的诊断有着明显的经济效益。 随着电子技术和计算机技术的快速发展,微型计算机技术,尤其是微控制器(单片机)的发展极为迅速,其应用越来越广。单片机主要应用于控制领域,用以实现各种测试和控制功能。目前,单片机还广泛应用于工业测控、计算机外围设备、工业智能化仪表、生产过程的自动控制、军事和航空航天等领域。 AT89C51是美国ATMEL公司生产的低电压,高性能CMOS8位单片机,片
学号:*********** 某某某某某某某学院学年论文 专业:********* 年级:20**级 姓名:******* 指导教师:******* 完成学期:20**-20**第**学期
霍尔效应实验应用与拓展 摘要:霍尔效应实验是物理专业学生的一个重要实验。本文详细介绍了霍尔效应的实验原理、霍尔效应的发现、本质以及霍尔实验的应用及霍尔实验的拓展。 关键词:霍尔效应;测量方法;应用发展前景 With the development of experimental application of Hall effect Abstract: Hall Effect experiment is an important experiment physics majors. This paper introduces the experimental principle, the Hall Effect of the discovery of the Hall Effect, nature and application and Hall experimental development. Key words: Hall Effect; Measuring method; Applied prospects for development 引言随着半导体物理学的迅速发展,霍尔系数和电导率的测量已成为研究半导体材料的主要方法之一。通过实验测量半导体材料的霍尔系数和电导率可以判断材料的导电类型、载流子浓度、载流子迁移率等主要参数。若能测量霍尔系数和电导率随温度变化的关系,还可以求出半导体材料的杂质电离能和材料的禁带宽度。如今,霍尔效应不但是测定半导体材料电学参数的主要手段,而且随着电子技术的发展,利用该效应制成的霍尔器件,由于结构简单、频率响应宽、寿命长、可靠性高等优点,已广泛用于非电量测量、自动控制和信息处理等方面。在工业生产要求自动检测和控制的今天,作为敏感元件之一的霍尔器件,将有更广阔的应用前景。了解这一富有实用性的实验,对日后的工作将有益处。 1.霍尔效应的原理 霍尔效应是电磁效应的一种,这一现象是美国物理学家霍尔(A.H.Hall,1855—1938)于1879年在研究金属的导电机制时发现的。如果对位于磁场(B)中的导体(d)施加一个电压(Iv),该磁场的方向垂直于所施加电压的方向,那么则在既与磁场垂直又和所施加电流方向垂直的方向上会产生另一个电压(UH),人们将这个电压叫做霍尔电压,产生这种现象被称为霍尔效应。这个电势差也被称为霍尔电势差。 2.霍尔效应的发现与本质 霍尔效应在1879年被物理学家霍尔发现,它定义了磁场和感应电压之间的关系,这种效应和传统的电磁感应完全不同。当电流通过一个位于磁场中的导体的时候,磁场会对导体
两种霍尔传感器的工作原理 霍尔电流传感器是根据霍尔原理制成的.它有两种工作方式,即磁平衡式和直式.霍尔电流传感器一般由原边电路、聚磁环、霍尔器件、(次级线圈)和放大电路等组成. 1 直放式电流传感器(开环式) 众所周知,当电流通过一根长导线时,在导线周围将产生一磁场,这一磁场的大小与流过导线的电流成正比,它可以通过磁芯聚集感应到霍尔器件上并使其有一信号输出.这一信号经信号放大器放大后直接输出,一般的额定输出标定为4V. 2 磁平衡式电流传感器(闭环式) 磁平衡式电流传感器也称补偿式传感器,即主回路被测电流Ip在聚磁环处所产生的磁场通过一个次级线圈,电流所产生的磁场进行补偿,从而使霍尔器件处于检测零磁通的工作状态。 磁平衡式电流传感器的具体工作过程为:当主回路有一电流通过时,在导线上产生的磁场被聚磁环聚集并感应到霍尔器件上,所产生的信号输出用于驱动相应的功率管并使其导通,从而获得一个补偿电流Is.这一电流再通过多匝绕组产生磁场,该磁场与被测电流产生的磁场正好相反,因而补偿了原来的磁场,使霍尔器件的输出逐渐减小.当与I H与匝数相乘与“原边电流与匝数相乘”所产生的磁场相等时, I H不再增加,这时的霍尔器件起指示零磁通的作用,此时可以通过I H来平衡.被测电流的任何变化都会破坏这一平衡.一旦磁场失去平衡,霍尔器件就有信号输出.经功率放大后,立即就有相应的电流I H流过次级绕组以对失衡的磁场进行补偿.从磁场失衡到再次平衡,所需的时间理论上不到1μs,这是一个动态平衡的过程。
工作原理主要是霍尔效应原理. 一、以零磁通闭环产品原理为例: 1、当原边导线经过电流传感器时,原边电流 IP 会产生磁力线,原边磁力线集中在磁芯气隙周围,内置在磁芯气隙中的霍尔电片可产生和原边磁力线成正比的,大小仅为几毫伏的感应电压,通过后续电子电路可把这个微小的信号转变成副边电流IS,并存在以下关系式:IS* NS= IP*NP 其中,IS—副边电流;IP—原边电流;NP—原边线圈匝数;NS—副边线圈匝数; NP/NS—匝数比,一般取 NP=1。 电流传感器的输出信号是副边电流IS,它与输入信号(原边电流IP)成正比,IS 一般很小,只有 10~400mA。如果输出电流经过测量电阻 RM,则可以得到一个与原边电流成正比的大小为几伏的电压输出信号。 2、传感器供电电压 VA VA 指电流传感器的供电电压,它必须在传感器所规定的范围内。超过此范围,传感器不能正常工作或可靠性降低,另外,传感器的供电电压VA又分为正极供电电压VA+和负极供电电压VA-。要注意单相供电的传感器,其供电电压VAmin是双相供电电压VAmin的2倍,所以其测量范围要相供高于双电的传感器。 3、测量范围 Ipmax 测量范围指电流传感器可测量的最大电流值,测量范围一般高于标准额定值 IPN。二、电流传感器主要特性参数1、标准额定值 IPN 和额定输出电流 ISN IPN 指电流传感器所能测试的标准额定值,用有效值表示(A.r.m.s),IPN 的大小与传感器产品的型号有关。ISN指电流传感器额定输出电流,一般为10~400mA,当然根据某些型号具体可能会有所不同。 2、偏移电流 ISO 偏移电流也叫残余电流或剩余电流,它主要是由霍尔元件或电子电路中运算放大器工作状态不稳造成的。电流传感器在生产时,在25℃,IP=0时的情况下,偏移电流已调至最小,但传感器在离开生产线时,都会产生一定大小的偏移电流。产品技术文档中提到的精度已考虑了偏移电流增加的影响。 3、线性度 线性度决定了传感器输出信号(副边电流IS)与输入信号(原边电流IP)在测量范围内成正比的程度。 4、温度漂移 偏移电流ISO是在25℃时计算出来的,当霍尔电极周边环境温度变化时,ISO会产生变化。因此,考虑偏移电流ISO的最大变化是很重要的,其中,IOT是指电流传感器性能表中的温度漂移值。5、过载电流传感器的过载能力是指发生电流过载时,在测量范围之外,原边电流仍会增加,而且过载电 流的持续时间可能很短,而过载值有可能超过传感器的允许值,过载电流值传感器一般测量不出来,但不会对传感器造成损坏。
毕业论文声明 本人郑重声明: 1.此毕业论文是本人在指导教师指导下独立进行研究取得的成果。除了特别加以标注地方外,本文不包含他人或其它机构已经发表或撰写过的研究成果。对本文研究做出重要贡献的个人与集体均已在文中作了明确标明。本人完全意识到本声明的法律结果由本人承担。 2.本人完全了解学校、学院有关保留、使用学位论文的规定,同意学校与学院保留并向国家有关部门或机构送交此论文的复印件和电子版,允许此文被查阅和借阅。本人授权大学学院可以将此文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本文。 3.若在大学学院毕业论文审查小组复审中,发现本文有抄袭,一切后果均由本人承担,与毕业论文指导老师无关。 4.本人所呈交的毕业论文,是在指导老师的指导下独立进行研究所取得的成果。论文中凡引用他人已经发布或未发表的成果、数据、观点等,均已明确注明出处。论文中已经注明引用的内容外,不包含任何其他个人或集体已经发表或撰写过的研究成果。对本文的研究成果做出重要贡献的个人和集体,均已在论文中已明确的方式标明。
学位论文作者(签名): 年月
关于毕业论文使用授权的声明 本人在指导老师的指导下所完成的论文及相关的资料(包括图纸、实验记录、原始数据、实物照片、图片、录音带、设计手稿等),知识产权归属华北电力大学。本人完全了解大学有关保存,使用毕业论文的规定。同意学校保存或向国家有关部门或机构送交论文的纸质版或电子版,允许论文被查阅或借阅。本人授权大学可以将本毕业论文的全部或部分内容编入有关数据库进行检索,可以采用任何复制手段保存或编汇本毕业论文。如果发表相关成果,一定征得指导教师同意,且第一署名单位为大学。本人毕业后使用毕业论文或与该论文直接相关的学术论文或成果时,第一署名单位仍然为大学。本人完全了解大学关于收集、保存、使用学位论文的规定,同意如下各项内容: 按照学校要求提交学位论文的印刷本和电子版本;学校有权保存学位论文的印刷本和电子版,并采用影印、缩印、扫描、数字化或其它手段保存或汇编本学位论文;学校有权提供目录检索以及提供本学位论文全文或者部分的阅览服务;学校有权按有关规定向国家有关部门或者机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入学校有关数据库和收录到《中国学位论文全文数据库》进行信息服务。在不以赢利为目的的前提下,学校可以适当复制论文的部分或全部内容用于学术活动。 论文作者签名:日期: 指导教师签名:日期: 本科毕业设计(论文)
霍尔齿轮转速传感器的工作原理和优点 作者: 发布时间:2009-11-25 来源: 关键字:霍尔转速传感器 霍尔转速传感器的主要工作原理是霍尔效应,也就是当转动的金属部件通过霍尔传感器的磁场时会引起电势的变化,通过对电势的测量就可以得到被测量对象的转速值。霍尔转速传感器的主要组成部分是传感头和齿圈,而传感头又是由霍尔元件、永磁体和电子电路组成的。 霍尔转速传感器的工作原理 霍尔转速传感器在测量机械设备的转速时,被测量机械的金属齿轮、齿条等运动部件会经过传感器的前端,引起磁场的相应变化,当运动部件穿过霍尔元件产生磁力线较为分散的区域时,磁场相对较弱,而穿过产生磁力线较为几种的区域时,磁场就相对较强。 霍尔转速传感器就是通过磁力线密度的变化,在磁力线穿过传感器上的感应元件时,产生霍尔电势。霍尔转速传感器的霍尔元件在产生霍尔电势后,会将其转换为交变电信号,最后传感器的内置电路会将信号调整和放大,输出矩形脉冲信号。 霍尔转速传感器的测量方法 霍尔转速传感器的测量必须配合磁场的变化,因此在霍尔转速传感器测量非铁磁材质的设备时,需要事先在旋转物体上安装专门的磁铁物质,用以改变传感器周围的磁场,这样霍尔转速传感器才能准确的捕捉到物质的运动状态。 霍尔转速传感器主要应用于齿轮、齿条、凸轮和特质凹凸面等设备的运动转速测量。高转速磁敏电阻转速传感器除了可以测量转速以外,还可以测量物体的位移、周期、频率、扭矩、机械传动状态和测量运行状态等。 霍尔转速传感器目前在工业生产中的应用很是广泛,例如电力、汽车、航空、纺织和石化等领域,都采用霍尔转速传感器来测量和监控机械设备的转速状态,并以此来实施自动化管理与控制。 霍尔转速传感器的应用优势 霍尔转速传感器的应用优势主要有三个,一是霍尔转速传感器的输出信号不会受到转速值的影响,二是霍尔转速传感器的频率相应高,三是霍尔转速传感器对电磁波的抗干扰能力强,因此霍尔转速传感器多应用在控制系统的转速检测中。 同时,霍尔转速传感器的稳定性好,抗外界干扰能力强,如抗错误的干扰信号等,因此不易因环境的因素而产生误差。霍尔转速传感器的测量频率范围宽,
4.2.2霍尔传感器的测速电路设计 首先选定传感器,霍尔传感器具有灵敏、可靠、体积小巧、无触点、无磨损、使用寿命长、功耗低等优点,综合了电机转速测量系统的要求。 其次设计一个单片机小系统,利用单片机的定时器和中断系统对脉冲信号进行测量或计数。 再次实时测量显示并有报警功能,实时测量根据脉冲计数来实现转速测量的方法。要求霍尔传感器转速为0~5000r/min。 霍尔测速模块论证与选择 采用霍尔传感器;选型号为CHV-25P/10的霍尔传感器,其额定电压为10v,输出信号5v/25mA,电源为12~15v。体积大,价格一般为40~120元之间不等。性价比较高 计数器模块论证与选择 采用片内的计数器。其优点在于降低单片机系统的成本。每到一个脉冲将会产生一个T1的计数,在T0产生的100ms中断完成后,T1的中断溢出次数就是所需要计的脉冲数。特点在于:使用了内部的T1作为外部脉冲的计数器,并且,为了避免计数器的溢出,将T1的初值设为0。 显示模块论证与选择 采用LCD液晶显示器作为显示模块核心。LCD显示器工作原理简单,编程方便,节能环保。 报警模块论证与选择 采用蜂鸣器与发光二极管作为声光报警主要器件。该方案不论在硬件和焊接方面还是在编写软件方面都简单方便,而且成本低廉。 电源模块论证与选择 采用交流220V/50Hz电源转换为直流5V电源作为电源模块。 该方案实施简单,电路搭建方便,可作为单片机开发常备电源使用。 单片机模块论证与选择 选用P89C51的单片机速度极快、功耗低、体积小、资源丰富,有各种不同的规格,最快的达100MPS ,引脚还可编程确定功能 选用51系列的单片机,是因为51的架构十分典型。而且: 1.价格便宜; 2.开发手段便宜; 3.自己动手焊接相对容易。 转速测量方案论证
摘要 随着计算机辅助设计技术(CAD)、微机电系统(MEMS)技术、光纤技术和信息技术的发展,获取各种信息的传感器已经成为各个应用领域,特别是自动检测、自动控制系统中不可缺少的重要技术工具,越来越成为信息社会赖以存在和发展的物质与技术基础。因此,在当今信息时代掌握传感器技术尤为重要。本文简述了传感器在机电一体化系统中的作用及其地位,也讲述了在机电一体化中常用传感器的类型、特点、结构及用途等,还介绍了在机电一体化中传感器的选择指标以及在以后的发展。 关键词:传感器,机电一体化
目录 前言 一、传感器的定义与组成 (4) 二、传感器在机电一体化技术中的地位及作用 (4) 三、常用传感器的类型、特点、结构及用途 (5) 3.1电阻式传感器 (5) 3.2电容式传感器 (5) 3.3电感式传感器 (6) 3.4压电式传感器 (6) 四、机电一体化系统中传感器的选择 (7) 五、机电一体化系统中常用传感器的发展 (8) 5.1传感器的微型化 (8) 5.2传感器的智能化 (9) 六、结论 七、参考文献 八、谢辞
前言 传感器作为机电一体化技术中不可缺少的部分,作为一名机电一体化专业的学生,我们必须了解传感器的在机电一体化技术中所扮演的角色,了解传感器的分类、组成、功能等。了解和学习传感器技术对于我们今后的学习和工作都有很大的帮助。传感器作为信息集训的一脉正在越来越广泛的普及及发展到我国的各行各业各个领域,其中为使我国从劳动密集型向技术型转化,必须利用其信息技术,即传感器技术,使传感器在工业自动化,农业国防军工,能源交通,家用电器等应用领域均有其开发市场。在我国尤以传感器技术的潜力最大。应用方面主要用于化学方面、环境保护方面、生物工程方面以及医疗卫生方面等等。
关于霍尔效应的论文 一:基本概念 美国物理学家霍尔于1879年在实验中发现,当电流垂直于外磁场通过导体时,在导体的垂直于磁场和电流方向的两个端面之间会出现电势差,这一现象便是霍尔效应。这个电势差也被叫做霍尔电势差。二:基本原理 霍尔效应是磁电效应的一种,当电流垂直于外磁场通过导体时,在导体的垂直于磁场和电流方向的两个端面之间会出现电势差,这个电势差就被叫做霍尔电势差。 导体中的载流子在外加磁场中运动时,因为受到洛仑兹力的作用而使轨迹发生偏移,并在材料两侧产生电荷积累,形成垂直于电流方向的电场,最终使载流子受到的洛仑兹力与电场斥力相平衡,从而在两侧建立起一个稳定的电势差即霍尔电压。正交电场和电流强度与磁场强度的乘积之比就是霍尔系数。平行电场和电流强度之比就是电阻率。此外,大量的研究揭示:参加材料导电过程的不仅有带负电的电子还有带正电的空穴。 方便起见,假设一导体为长方体,长度为a ,b ,c .磁场垂直ab 平面,电流经过ad,则I=nqv(ad),n为电荷密度。设霍尔电压VH,导体沿霍尔电压方向的电场为VH/a,设磁场强度为B。则由 qVH/a=qvB得VH=vBa,把v=i/nqad带入得VH=iB/nqd. 因此,对于一个已知霍尔系数的导体,通过一个已知方向、大小的电
流,同时测出该导体两侧的霍尔电势差的方向与大小,就可以得出该导体所处磁场的方向和大小。 三:霍尔效应的主要应用 根据霍尔效应做成的霍尔器件,就是以磁场为工作媒体,将物体的运动参量转变为数字电压的形式输出,使之具备传感和开关的功能。 讫今为止,已在现代汽车上广泛应用的霍尔器件有:在分电器上作信号传感器、ABS系统中的速度传感器、汽车速度表和里程表、液体物理量检测器、各种用电负载的电流检测及工作状态诊断、发动机转速及曲轴角度传感器、各种开关,等等。 例如:汽车点火系统,设计者将霍尔传感器放在分电器内取代机械断电器,用作点火脉冲发生器。这种霍尔式点火脉冲发生器随着转速变化的磁场在带电的半导体层内产生脉冲电压,控制电控单元(ECU)的初级电流。相对于机械断电器而言,霍尔式点火脉冲发生器无磨损免维护,能够适应恶劣的工作环境,还能精确地控制点火正时,能够较大幅度提高发动机的性能,具有明显的优势。 用作汽车开关电路上的功率霍尔电路,具有抑制电磁干扰的作用。许多人都知道,轿车的自动化程度越高,微电子电路越多,就越
实验九霍尔转速传感器测速实验 一、实验目的 了解霍尔转速传感器的应用。 二、基本原理 根据霍尔效应表达示U H=K H IB,当K H I不变时,在转速圆盘上装上N只磁性体,并在磁钢上方安装一霍尔元件。圆盘每转一周,表面的磁场B从无到有就变化N次,霍尔电势也相应变化N次。此电势通过放大、整形和计数电路就可以测量被测旋转体的转速。 三、需用器件与单元 霍尔转速传感器、转速测量控制仪。 四、实验步骤 1、根据图9-1,将霍尔转速传感器装于转动源的传感器调节支架上,探头对准转盘内的磁钢。 图9-1 霍尔转速传感器安装示意图 2、将+15V直流电源加于霍尔转速器的电源输入端,红(+)、绿( ),不要接错。 3、将霍尔传感器输出端(黄线)接示波器或者频率计。 4、调节电动转速电位器使转速变化,用示波器观察波形的变化(特别注意脉宽的变化), 或用频率计观察输出频率的变化。
五、实验结果分析与处理 1、记录频率计六组输出频率数值如下: 由以上数据可得:最快转速对应的频率f1=152.83Hz,最慢转速对应频率f6=20.1Hz。随着转速的减小,脉宽T1逐渐变大,但占空比基本保持不变,而且速度不能无限减小。 六、思考题 1、利用霍尔元件测转速,在测量上是否有所限制? 答:有,测量速度不能过慢,因为磁感应强度发生变化的周期过长,大于读取脉冲信号的电路的工作周期,就会导致计数错误。 2、本实验装置上用了二只磁钢,能否只用一只磁钢? 答:如果霍尔是单极的,可以只用一只磁钢,但可靠性和精度会差一些;如果霍尔是双极的,那么必须要有一组分别为n/s极的磁钢去开启关断它,那么至少要两只磁钢。 1
目录 摘要 (3) 1.1传感器技术的发展 (4) 1.2机电一体化系统的发展 (8) 1.3传感器在机电一体化系统的应用 (27) 1.4如何为机电一体化系统选择传感器 (33) 1.5机电一体化系统中常用传感器的发展 (36) 结论 (38) 参考文献 (40)
摘要 传感器是检测中首先感受被测量、并将它转换成与被测量有确定对应关系的电量器件,它是检测和控制系统中最关键的部分。机电一体化是机械的主功能、动力功能、信息功能和控制功能上引进微电子技术,并将机械装置与电子装置用相关软件有机结合而构成系统的总称。在机电一体化系统中,传感器处系统之首,其作用相当于系统感受器官,能快速、精确地获取信息并能经受严酷环境考验,是机电一体化系统达到高水平的保证。如缺少这些传感器对系统状态和对信息精确而可靠的自动检测,系统的信息处理、控制决策等功能就无法谈及和实现。传感器在机电一体化系统中应用广泛,是机电产品中是必不可少的器件之一。 关键词:传感器机电一体化系统
传感器技术 传感器来自“感觉”一词,人们用视觉、听觉、味觉、嗅觉和触觉等感官感受外界的有关信息,如物体的大小、形状和颜色,感觉到的声音、气味等。在视觉情况下,绝不是靠眼睛本身进行感觉,而是从眼睛进入的外界刺激信号通过神经传送到大脑,有大脑感知物体的大小和颜色,然后由大脑提供命令信号支配行动。听觉和嗅觉等也完全一样。然而,要使大脑受到这些刺激,首先必须有接受外界刺激的“五官”,人的“五官”可以称之为传感器。它们的基本功能是首先接受外界的刺激信号,然后产生作用于各种神经传递信号的能量,最后在传送到大脑。在传感器的系统中,传感器模拟人“五官”的这些作用,将外界刺激信号转换为能传递的信号,即使特定的被测量(包括物理量、化学量、生物量等)按照一定的规律转换成某种可用的输出信号。 传感器是一种以一定的精确度把被测量转换为与之有确定对应关系的、便于应用的另一种量的测量装置。传感器的定义具体包含:①传感器是测量装置,能、完成检测任务;②它的输入量是某一被测量,可能是物理量,也可能是化学量、生物量等;③它的输出量是某种物理量,这种量应便于传输、转换、处理、显示等,它可以是气、光、电,但主要是电量。 传感器一般由敏感元件和转换元件两大部分组成。但很多时候也将转换电路及辅助电路作为其组成部分,因为传感器作为一个完整的器件,绝大部分都是把转换电路及必要的辅助电源单元与敏感元件、