LS-DYNA常见问题汇总
1.0
资料来源:网络和自己的总结yuminhust2005
Copyright of original English version owned by relative author. Chinese version owned by https://www.doczj.com/doc/6e6154131.html,/Kevin
目录
1.Consistent system of units 单位制度 (2)
2.Mass Scaling 质量缩放 (4)
3.Long run times 长分析时间 (9)
4.Quasi-static 准静态 (11)
5.Instability 计算不稳定 (14)
6.Negative Volume 负体积 (17)
7.Energy balance 能量平衡 (20)
8.Hourglass control 沙漏控制 (27)
9.Damping 阻尼 (32)
10.ASCII output for MPP via binout (37)
11.Contact Overview 接触概述 (41)
12.Contact Soft 1 接触Soft=1 (45)
13.LS-DYNA中夹层板(sandwich)的模拟 (47)
14. 怎样进行二次开发 (50)
1.Consistent system of units 单位制度
相信做仿真分析的人第一个需要明确的就是一致单位系统(Consistent Units)。计算机只认识0&1、只懂得玩数字,它才不管你用的数字的物理意义。而工程师自己负责单位制的统一,否则计算出来的结果没有意义,不幸的是大多数老师在教有限元数值计算时似乎没有提到这一点。见下面LS-DYNA FAQ中的定义:Definition of a consistent system of units (required for LS-DYNA):
1 force unit = 1 mass unit * 1 acceleration unit
1 力单位=1 质量单位× 1 加速度单位
1 acceleration unit = 1 length unit / (1 time unit)^2
1 加速度单位= 1 长度单位/1 时间单位的平方
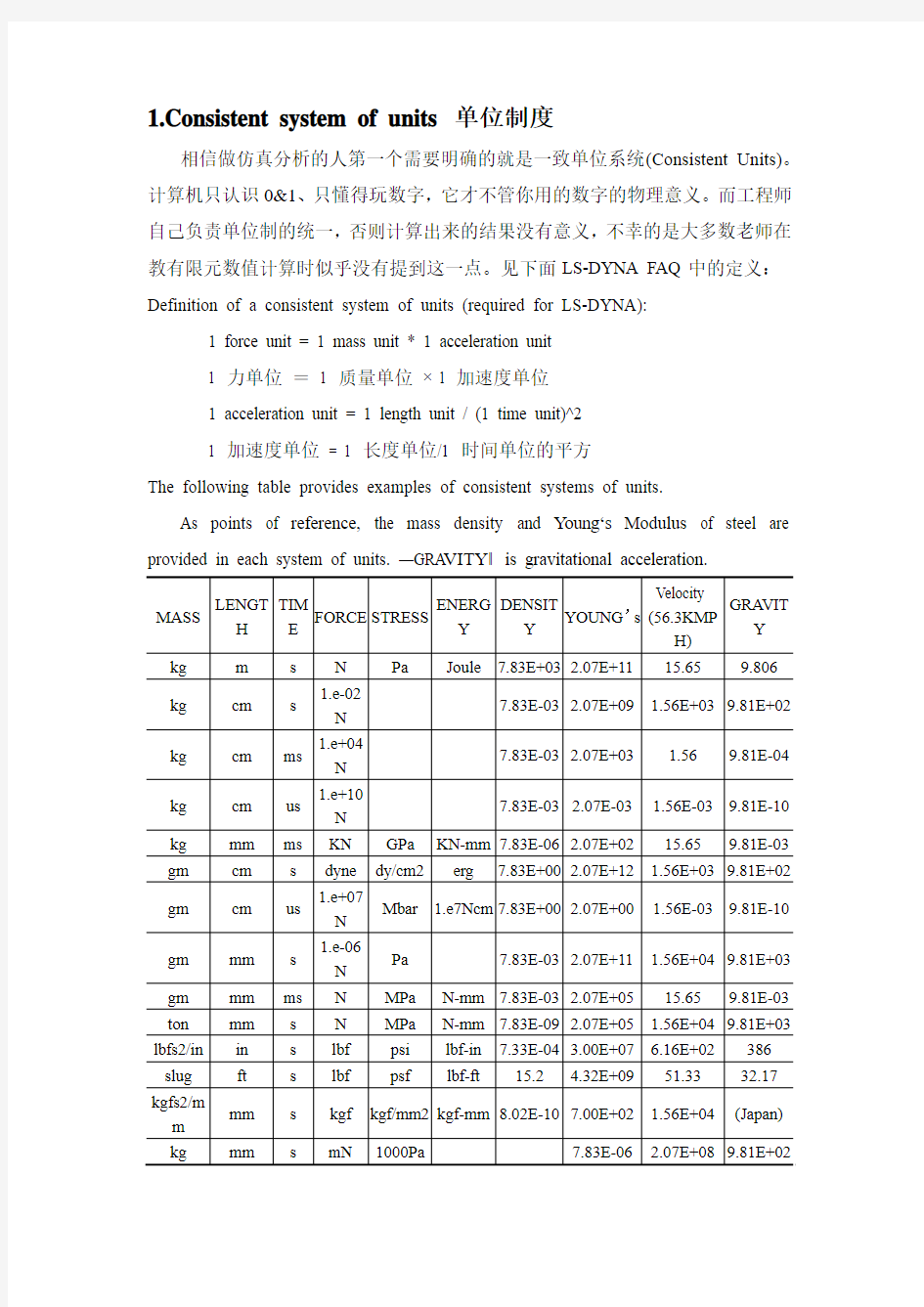
The following table provides examples of consistent systems of units.
As points of reference, the mass density and Young‘s Modulus of steel are provided in each system of units. ―GRA VITY‖ is gravitational acceleration.
2.Mass Scaling 质量缩放
质量缩放指的是通过增加非物理的质量到结构上从而获得大的显式时间步的技术。
在一个动态分析中,任何时候增加非物理的质量来增大时间步将会影响计算结果(因为F=ma)。有时候这种影响不明显,在这种情况下增加非物理的质量是无可非议的。比如额外的质量只增加到不是关键区域的很少的小单元上或者准静态的分析(速度很小,动能相对峰值内能非常小)。总的来说,是由分析者来判断质量缩放的影响。你可能有必要做另一个减小或消除了质量缩放的分析来估计质量增加对结果的灵敏度。
你可以通过人工有选择的增加一个部件的材料密度来实现质量缩放。这种手动质量缩放的方法是独立于通过设置*Control_timestep卡DT2MS项来实现的自动质量缩放。
当DT2MS设置为一个负值时,质量只是增加到时间步小于TSSFAC*|DT2MS|的单元上。通过增加这些单元的质量,它们的时间达到TSSFAC*|DT2MS|。有无数种TSSFAC和DT2MS的组合可以得到同样的乘积,因而有相同的时间步,但是对于每一种组合增加的质量将是不一样的。一般的趋势是TSSFAC越小,增加的质量越多。作为回报,当TSSFAC减小时计算稳定性增加(就像在没有做质量缩放的求解中一样)。如果TSSFAC缺省的值0.9会导致稳定性问题,可以试试0.8或者0.7。如果你减小TSSFAC,你可以相应增加|DT2MS|,这样还是可以保证时间步乘积不变。
为了确定什么时候和位置质量自动增加了,可以输出GLSTAT和MATSUM 文件。这些文件允许你绘出完整的模型或者单独部件所增加的质量对时间的曲线。为了得到由壳单元组成的部件增加的质量云图,将*database_extent_binary 卡的STSSZ项设置为3。这样你可以用ls-prepost绘出每个单元的质量增加量的云图,具体方法是通过选择Fcomp>Misc>time step size。
在*control_timestep中设置DT2MS正值和负值的不同之处如下:
负值:初始时间步将不会小于TSSFAC*-DT2MS。质量只是增加到时间步小于TSSFAC*|DT2MS|的单元上。当质量缩放可接受时,推荐用这种方法。用这种方法时质量增量是有限的。过多的增加质量会导致计算任务终止。
正值:初始时间将不会小于DT2MS。单元质量会增加或者减小以保证每一个单元的时间步都一样。这种方法尽管不会因为过多增加质量而导致计算终止,但更难以作出合理的解释。
*control_timestep卡中的参数MS1ST控制是否只是在初始化时增加一次质量(MS1ST=1)还是任何需要维持由DT2MS所指定的时间步时都增加质量(MS1ST=0)。
你可以通过在*control_termination卡片中设置参数ENDMAS来控制当质量增加到初始质量一定比率时终止计算(只对自动质量缩放有效)
--------------------------
可变形点焊梁的质量缩放
*mat_spotweld卡的质量缩放参数DT只影响点焊单元。如果*control_timestep 卡中没有指定质量缩放(DT2MS=0),而且时间由可变形点焊控制,可以用参数DT来在初始化时增加惯量到点焊单元上来提高时间步达到DT指定的值。当DT 不为0时,增加到可变形点焊梁元上的质量会输出到d3hsp文件里。MATSUM 中动量和动能不受增加到可变形点焊上的质量的影响。GSLTAT中DOES和总的KE受增加的质量的影响。
考虑三种调用可变形点焊的质量缩放的情况:
1.当DT2MS为负值*mat_spotweld卡DT=0时,尽管在d3hsp文件中可变形点焊质量增量百分比不真实。下面几个值是正确的:d3hsp中‖added spotweld mass‖;第一个时间步之后的‖added mass‖& ―percentage increase‖;glstat和matsum中的‖added mass‖。
2. 当DT2MS为负值且*mat_spotweld卡DT≠0时,可变形点焊质量增加不会包含在d3hsp、glstat、matsum文件中的‖added mass‖里。这非常容易令人误解。用户必须检查d3hsp文件的‖added spotweld mass‖。建议不要同时使用两种质量缩放标准,推荐使用第一种方法(即负的DT2MS&DT=0)。
3. 如果DT2MS=0且DT≠0,初始时间步将不考虑增加点焊的质量,但是之后每一个周期时间步都会增加10%,直到时间步达到正确的值(考虑点焊质量增加)。glstat & matsum不包含‖added mass‖的行。
注意质量增加会引起能量比率增长。
English Version:
Mass-scaling refers to a technique whereby nonphysical mass is added to a structure in order to achieve a larger explicit timestep.
Anytime you add nonphysical mass to increase the timestep in a dynamic analysis, you affect the results (think of F = ma). Sometimes the effect is insignificant and in those cases adding nonphysical mass is justifiable. Examples of such cases may include the addition of mass to just a few small elements in a noncritical area or quasi-static simulations where the velocity is low and the kinetic energy is very small relative to the peak internal energy. In the end, it‘s up to the judgement of the analyst to gage the affect of mass scaling. You may have to reduce or eliminate mass scaling in a second run to gage the sensitivity of the results to the amount of mass added.
One can employ mass scaling in a selective manner by artificially increasing material density of the parts you want to mass-scale. This manual form of mass scaling is done independently of the automatic mass scaling invoked with DT2MS in *control_timestep.
When DT2MS is input as a negative value, mass is added only to those elements whose timestep would otherwise be less than TSSFAC * |DT2MS|. By adding mass to these elements, their timestep becomes equal to TSSFAC * |DT2MS|. An infinite number of combinations of TSSF and DT2MS will give the same product and thus the same timestep but the added mass will be different for each of those combinations. The trend is that the smaller the TSSF, the greater the added mass. In return, stability may improve as TSSF is reduced (just as in non-mass-scaled solutions). If stability is a problem with the default TSSF of 0.9, try 0.8 or 0.7. If you reduce TSSF, you can increase |DT2MS| proportionally so that the product/timestep is unchanged.
To determine where and when mass is automatically added, write GLSTAT and MATSUM files. These files will allow you to plot added mass vs. time for the complete model and for individual parts, respectively. To produce fringe plots of added mass in parts comprised of shell elements (DT2MS negative), set STSSZ=3 in *database_extent_binary. You can then fringe the added mass (per element) using LS-POST by choosing Fcomp > Misc > time step size. (Here, the label ―time step
size‖ is really the element added mass.)
The difference between using a positive or negative number for DT2MS in *control_timestep is as follows:
Negative: Initial time step will not be less than TSSF * -DT2MS. Mass is added to only those elements whose timestep would otherwise be less than TSSF*abs(DT2MS). When mass scaling is appropriate, I recommend this method. The amount of mass that can be added using this method is limited. ?Excessive‘ added mass will cause the job to terminate.
Positive: Initial time step will not be less than DT2MS. Mass is added OR TAKEN AWAY from elements so that the timestep of every element is the same. This method is harder to rationalize although it is not subject to termination from ?excessive‘ added mass.
The parameter MS1ST in *control_timestep controls whether mass is added only once during initialization (MS1ST=1) or anytime as necessary to maintain the desired timestep specified via DT2MS (MS1ST=0).
You can use ENDMAS in *control_termination to stop the calculation after a certain amount of mass has been added (active for automatic mass scaling only).
_____________________________________________________________________ Mass-scaling of deformable spotweld beams:
The mass-scaling parameter in *mat_spotweld (DT) affects only the spotwelds. If no mass-scaling is invoked in *control_timestep (DT2MS=0.) AND the timestep is controlled by the deformable spotwelds, DT can be used to add inertia to the spotwelds during intialization in order to increase the timestep to a value of DT. When DT is nonzero, mass added to spotweld beams is reported to d3hsp. MATSUM momentum and KE does NOT factor in added mass to def. spotwelds. GLSTAT DOES factor in added mass to total KE (spotweld.beam.type9.mscale.initvel.k) Consider 3 cases of invoking mass-scaling in a model with deformable spotwelds:
1.Although ―percentage mass increase‖ under ―Deformable Spotwelds:‖ in d3hsp is bogus when DT2MS is neg. and DT in *mat_spotweld = 0, the following are
correct:
―added spotweld mass‖ in d3hsp
―added mass‖ and ―percentage increase‖ in d3hsp AFTER the first time step
―added mass‖ in glstat and matsum
2. Added spotweld mass controlled by DT in *mat_spotweld is NOT INCLUDED in ―added mass‖ given in d3hsp, glstat, or matsum when DT2MS is neg. and DT in *mat_spotweld is nonzero. This can be quite misleading. User must check for ―added spotweld mass‖in d3hsp. Recommended: Do not invoke both mass-scaling criteria. Neg. DT2MS with DT=0 (case 1 above) is preferred.
3. If DT is nonzero and DT2MS=0, the initial timestep will NOT consider added spotweld mass but the time step will increase by 10% each cycle until the correct timestep (considering added spotweld mass) is achieved. Glstat and matsum contain no ―added mass‖ line item.
The above can be illustrated using
/j5000a_2/jday/test/weld/spotweld.beam.type9.mscale.k.
_____________________________________________________________________ Note that added mass may cause the energy ratio to rise.
(See /j5000a_2/jday/test/erode/taylor.mat3.noerode.mscale.k)
3.Long run times 长分析时间
当用显式时间积分时,对于仿真非常小的部件而分析时间又要相当长时没有好的方法。质量缩放(mass-scaling)增加了需要确认非物理质量的增加不会显著影响计算结果的负担。当使用时间缩放(time-scaling)时也有同样的问题。时间缩放(time-scaling)是指为了减小需要的时间步数,通过增加加载速率而缩短仿真时间。
要确认时间步不是仅由很少的小单元或者刚度大单元控制,可以通过在d3hsp文件中搜索‖smallest‖来显示100个最小的时间步单元。如果只有很少的几个单元控制时间步,可以把那些单元及邻近区域重新remesh或者把它们变成刚体。
可是仅运行必要长的时间是很明显的。这意味着在一个跌落分析的情况时,给跌落物体一个初速度,把它放在离地面一个非常小的距离。冲击之后,仅运行足够得到需要的结果的时间。
值得注意的是对于一个长时间的仿真,如果时间步数超过了50万步,最好使用双精度版本的LS-DYNA求解器,使截断误差的影响最小化。运行双精度版本要增加30%的时间。
对于长时间的分析,自动显式/隐式转换可能是一个选择。使用这种方法,用户可以指定在一个时间段内使用隐式积分。隐式积分的优点是时间步不由单元尺寸控制,所以可以得到大的时间步。当然,隐式计算也非常点用cpu时间。而且,目前并不是所有的LS-DYNA的功能和材料都在隐式分析中实现(大部分已经实现)。下面的FEA information newsletter里讨论了显式/隐式转换(https://www.doczj.com/doc/6e6154131.html,/pages/pdfnews/3feadec.pdf)。
See also: mass_scaling, quasistatic
English Version:
When you‘re using explicit time integration, there is no magic cure for long run times associated with simulating very small geometries over relatively long periods of time. Mass-scaling carries a burden of having to confirm that the addition of nonphysical mass does not significantly affect the results (see attached file ―mass_scaling‖). A similar burden exists when time-scaling is employed.
Time-scaling is a technique where the loading rate is increased and thus the simulation time is shortened in order to reduce the required number of timesteps.
Make sure that your timestep is not being controlled by only a few small or stiff elements by searching in the d3hsp file for the string ―smallest‖.If there are only a few controlling elements, you can remesh in the vicinity of those elements or perhaps make them rigid.
Though it‘s rather obvious, run only as long as is necessary. This means in the case of a drop simulation, assigning an initial velocity to the dropped object and placing it a very small distance from the landing surface. After impact, run only long enough to get the results you need.
Be aware that for lengthy simulations where the number of timesteps goes above half a million or so, you‘d be well advised to use a double precision executable of LS-DYNA to minimize error due to roundoff. Running double precision carries with it a cpu penalty of around 30%.
Automatic explicit/implicit switching may be an option. Using this technique, the user can specify time windows in which implicit time integration is used as opposed to explicit time integration. An advantage of implicit time integration is that timesteps are not tied to element size and can thus be much larger. Of course, an implicit timestep is also much more expensive in terms of cpu. Further, not all LS-DYNA features and materials are implemented for implicit analysis at this time (though most are). Explicit/implicit switching is discussed in the following archived FEA Information newsletter…
https://www.doczj.com/doc/6e6154131.html,/pages/pdfnews/3feadec.pdf
See also: mass_scaling, quasistatic.
4.Quasi-static 准静态
动态松驰(Dynamic relaxation)并不是有意为一般的准静态(quasi-static)分析设置的。它适合于当预载只产生小的弹情况应变的施加预载,或者初始化系统到一个预定义的几何形状[1]。但对其它更多情况并不适合。
你可以通过做一个常规的显示仿真来模拟准静态分析,通过按需要调用时间/质量缩放(time-scaling,mass-scaling)来在可接受的时间内得到结果,但这种方法是需要技巧地。你必须监测系统动能按希望的使惯性效应最小化。基本上动能相对内能应该保持在一个较小的值。时间缩放是指加载比在准静态实验里更快,以减少总的仿真时间。关于质量缩放更多内容可以看‖mass_scaling‖一节。或者你可以尝试用LS-DYNA运行一个隐式静力分析。可以看用户手册里的卡片*control_implicit_…‖和Appendix M。
See also: gravity.txt, readme.preload, mass_scaling, long_run_times, implicit.general, quick_initialization.
Note[1]:初始化到预定义的几何
1. 从第一次分析的最终状态输出一个节点位移文件。(这一部分未按原文翻译)注意d3plot文件里不包含节点转动信息,因此转动输出为0。这对初始化壳和梁单元会是个问题。LS-Prepost有一个选项是输出节点位移,在Output->Nodal Displacements里。但是这个输出是i8,3e16格式的,但需要的是i8,3e15,所以要注意修改一下。
如果你做了一个正常的动态松驰分析来得到初始状态,一个预定义位移和转动的drdisp.sif文件在DR阶段结束时会自动创建。
2. 在第二次分析时,快速的初始化到第一步输出的预定义的几何。你需要设置卡片*control_dynamic_relaxation里的参数IDRFLG=2,而且在命令行里指定‖m=filename‖(其中filename指第一步创建的文件)。这样在瞬态分析之前,LS-DYNA会自动做一个100步的预分析来使节点根据文件filename指定的数据移动到指定值。
English Version:
Dynamic relaxation is not intended for general quasistatic analysis. It‘s ok for applying preload when the preload produces only small elastic strains or for
initializing a system to a prescribed geometry[1] but it‘s not good for much else.
You can do a quasi-static analysis by running a regular explicit simulation, invoking time- and/or mass-scaling as necessary to crank out the results in a reasonable timeframe, but this approach can be tricky. You have to keep an eye on the kinetic energy in the system as you want to minimize the inertial effects. Basically, the kinetic energy should remain small relative to the internal energy. (By time-scaling, I mean applying the load more quickly than in the quasi-static experiment in order to reduce the simulation time.) See the file ―mass_scaling‖for more on mass-scaling.
Or, you can try an implicit, static analysis using LS-DYNA. See the commands *control_implicit_… and Appendix M in the User‘s Manual. There are examples of implicit analysis on our ―user‖ftp site in the ls-dyna/example directory. See also: gravity.txt, readme.preload, mass_scaling, long_run_times, implicit.general, quick_initialization.
Note [1]
*** Initializing to a prescribed geometry ***
1. Write a file of nodal displacements from the final state of your first run. To get this data in the necessary format, use LS-TAURUS as follows:
ls-taurus g=d3plot < executes 1000 < goes to final state deform < write a file as described above t < termimate LS-TAURUS
Note the d3plot does not contain nodal rotations and thus the rotations are written as zero. This could be a real problem for initialization of shells and beams.
LS-PREPOST has an option to write the displacements using Output > Nodal Displacements but the output is i8,3e16 rather than the required i8,3e15 and hence the suggested use of LS-TAURUS.
LS-TAURUS is not available for Windows PCs. It‘s free and available for Unix and Linux workstations.
If you do a ?regular‘ dynamic relaxation run to get to the initialized state, a file of prescribed displacements and rotations will automatically be written at the conclusion of the DR phase (drdisp.sif).
Bug #2020 reported on 9/22/2004 that rigid body nodes do not get initialized according to data in ―m=pres_geom_file‖.Additional example in /home/jday/test/cantilever/solid/typ2sol_dr_nrb.k (creates drdisp.sif) and typ2sol_presgeom_nrb.k (m=drdisp.sif run). Nodes 11,22,33,44 are not initialized to what‘s in drdisp.sif 2. In your second run, quickly initialize to the prescribed geometry written in step 1. You need to set:
IDRFLG=2 in *control_dynamic_relaxation and include ―m=filename‖on the execution line where ―filename‖ is the file created in step 1. Before the transient run begins, LS-DYNA will automatically run a precusor analysis of 100 timesteps wherein the nodse are displaced according to the data in ―filename‖.
5.Instability 计算不稳定
一些表示计算不稳定的消息如:
―out-of-range velocities‖速度超出范围
―negative volume in brick element‖体单元负体积
―termination due to mass increase‖因质量增加而终止
用来克服显式求解中的不稳定的方法如下:
首先(也是最重要的)是使用可获得的最新的LS-DYNA版本。最新的执行块可以从ftp://user@https://www.doczj.com/doc/6e6154131.html,上下载(注:前提是你有访问权限)。联系LSTC获得user帐号的密码。最新的BETA版执行块可以在ftp://https://www.doczj.com/doc/6e6154131.html,/outgoing/ls971上找到(不需要密码,但lstc公司对ftp访问有IP限制)。
其次是增加d3plot的输出频率到可以显示出不稳定的出现过程。这可以提供导致不稳定性发生的线索。
其它的不些解决数值不稳定性的技巧:
* 试着用双精度LS-DYNA版本运行一次
* 试着减小时间步(timestep)缩放系数(即使使用了质量缩放mass-scaling)
* 单元类型和/或沙漏(hourglass)控制。对出现不稳定的减缩体和壳单元,试着用沙漏控制type 4 和沙漏系数0.05
。或者试着用类型16的壳单元,沙漏控制type 8。如果壳响应主要是弹性,设置BWC=1 和PROJ=1 (仅对B-T壳)。
避免使用type=2体单元。对体单元部件,在厚度方向最少用两个体单元。
* 接触。设置接触的bucket sorts之间周期数为0,这样会使用缺省的分类间隔。如果参与接触的两个部件的相对速
度异常的大,可能需要减小bucket sort的间隔(比如减小到5,2甚至1)。
如果仿真过程中有明显的接触穿透出现,转换到使用*contact_automatic_surface_to_surface或者
*contact_automatic_single_surface,并设置SOFT=1。确保几何考虑了壳单元的厚度。如果壳非常薄,比如小于
1mm,放大或者设置接触厚度到一个更加合理的值。
* 避免冗余的接触定义,也就是说不要对同样的两个部件定义多于一个的接
触对。
* 查找出现不稳定的部件的材料定义中的错误(比如误输入,不一致的单位系统等)
* 关掉所有的*damping
这些技巧是一些通用的方法,可能并不适合于所有的情况。
See also: negative_volume_in_brick_element.tips,shooting-nodes
English Version:
Some messages that indicate an instability has occurred:
―out-of-range velocities‖
―negative volume in brick element‖
―termination due to mass increase‖
Approaches to combating instability of an explicit solution:
First and foremost, use the latest version/revision of LS-DYNA available. The latest production executables can be downloaded from ftp://user@https://www.doczj.com/doc/6e6154131.html,. Contact LSTC for the password to this ―user‖ftp account. More recent BETA executables are found in ftp://https://www.doczj.com/doc/6e6154131.html,/outgoing/ls971 (no password required).
The next step is to write plot states frequently enough to see the evolution of the instability. This should offer clues into what‘s initiating the instability.
Some other general tips toward resolving numerical instabilities:
* Try running a double precision LS-DYNA executable.
* Timestep. Try reducing the timestep scale factor (even if mass-scaling is invoked).
* Element formulation and/or hourglass control. For underintegrated solids or shells that go unstable, try hourglass type 4 with a hourglass coefficient of 0.05. Or, try shell formulation 16 with hourglass type 8. If response of shells is primarily elastic, set BWC=1 and PROJ=1 (B-T shells only).
Avoid type 2 solids. Use at least two solid elements thru the thickness of any solid part.
* Contact. Set number of cycles between bucket sorts to zero so that the default
sort interval will be used. If the relative velocity between two parts in contact is exceptionally high, it may be necessary to reduce the bucket sort interval (for instance to 5, 2, or even 1).
If visible contact penetrations develop during the simulation, switch to *contact_automatic_surface_to_surface or *contact_automatic_single_surface with SOFT set to 1. Make sure geometry takes into account thickness of shells. If shells are VERY thin, e.g., less than 1 mm, scale up or set the contact thickness to a more reasonable value.
Avoid redundant contact definitions, that is, don‘t treat contact between the same two parts using more than one contact definition.
* Look for mistakes (typos, inconsistent units, etc.) in material input of parts that go unstable.
* Turn off all *damping.
These tips are of a general nature and may not be appropriate in all situations. See also: negative_volume_in_brick_element.tips, shooting-nodes
6.Negative Volume 负体积
泡沫材料的负体积(或其它软的材料)
对于承受很大变形的材料,比如说泡沫,一个单元可能变得非常扭曲以至于单元的体积计算得到一个负值。这可能发生在材料还没有达到失效标准前。对一个拉格朗日(Lagrangian)网格在没有采取网格光滑(mesh smoothing)或者重划分(remeshing)时能适应多大变形有个内在的限制。LS-DYNA中计算得到负体积(negative volume)会导致计算终止,除非在*control_timestep卡里面设置ERODE 选项为1,而且在*control_termination里设置DTMIN项为任何非零的值,在这种情况下,出现负体积的单元会被删掉而且计算继续进行(大多数情况)。有时即使ERODE和DTMIN换上面说的设置了,负体积可能还是会导致因错误终止。
有助于克服负体积的一些方法如下:
* 简单的把材料应力-应变曲线在大应变时硬化。这种方法会非常有效。
* 有时候修改初始网格来适应特定的变形场将阻止负体积的形成。此外,负体积通常只对非常严重的变形情况是个问题,而且特别是仅发生在像泡沫这样的软的材料上面。
* 减小时间步缩放系数(timestep scale factor)。缺省的0.9可能不足以防止数值不稳定。
* 避免用全积分的体单元(单元类型2和3),它们在包含大变形和扭曲的仿真中往往不是很稳定。全积分单元在大变形的时候鲁棒性不如单点积分单元,因为单元的一个积分点可能出现负的Jacobian而整个单元还维持正的体积。在计算中用全积分单元因计算出现负的Jacobian而终止会比单元积分单元来得快。
* 用缺省的单元方程(单点积分体单元)和类型4或者5的沙漏(hourglass)控制(将会刚化响应)。对泡沫材料首先的沙漏方程是:如果低速冲击type 6,系数1.0; 高速冲击type 2或者3。
* 对泡沫用四面体(tetrahedral)单元来建模,使用类型10体单元。
* 增加DAMP参数(foam model 57)到最大的推荐值0.5。
* 对包含泡沫的接触,用*contact选项卡B来关掉shooting node logic。
* 使用*contact_interior卡
用part set来定义需要用contact_interior来处理的parts,在set_part卡1的第
5项DA4来定义contact_interior类型。缺省类型是1,推荐用于单一的压缩。在版本970里,类型1的体单元可以设置type=2,这样可以处理压缩和减切混合的模式。
* 如果用mat_126,尝试ELFORM=0
* 尝试用EFG方程(*section_solid_EFG)。因为这个方程非常费时,所以只用在变形严重的地方,而且只用于六面体单元。
See also: instability
English Version:
Negative V olumes in Foams (or other soft materials)
In materials that undergo extremely large deformations, such as soft foams, an element may become so distorted that the volume of the element is calculated as negative. This may occur without the material reaching a failure criterion. There is an inherent limit to how much deformation a Lagrangian mesh can accommodate without some sort of mesh smoothing or remeshing taking place. A negative volume calculation in LS-DYNA will cause the calculation to terminate unless ERODE in *control_timestep is set to 1 and DTMIN in *control_termination is set to any nonzero value in which case the offending element is deleted and the calculation continues (in most cases). Even with ERODE and DTMIN set as described, a negative volume may cause an error termination (see erode/negvol.k).
Some approaches that can help to overcome negative volumes include the following.
- Simply stiffen up the material stress-strain curve at large strains. This approach can be quite effective.
- Sometimes tailoring the initial mesh to accommodate a particular deformation field will prevent formation of negative volumes. Again, negative volumes are generally only an issue for very severe deformation problems and typically occur only in soft materials like foam.
- Reduce the time step scale factor. The default of 0.9 may not be sufficient to prevent numerical instabilities.
- Avoid fully-integrated solids (formulations 2 and 3) which tend to be less stable in situations involving large deformation or distortion. (The fully integrated element is less robust than a 1-point element when deformation is large because a negative Jacobian can occur at one of the integration points while the element as a whole maintains a positive volume. The calculation with fully integrated element will therefore terminate with a negative Jacobian much sooner than will a 1-point element. (lpb))
- Use the default element formulation (1 point solid) with type 4 or 5 hourglass control (will stiffen response). Preferred hourglass formulations for foams are: type 6 with coef. = 1.0 if low velocity impact types 2 or 3 if high velcocity impact - Model the foam with tetrahedral elements using solid element formulation 10 (see ~pdf/dubois-foam-tets.pdf).
- Increase the DAMP parameter (foam model 57) to the maximum recommended value of 0.5.
- Use optional card B of *contact to turn shooting node logic off for contacts involving foam.
- Use *contact_interior. A part set defines the parts to be treated by contact_interior. Attribute 4 (DA4 = 5th field of Card 1) of the part set defines the TYPE of contact_interior used. The default TYPE is 1 which is recommended for uniform compression. In version 970, solid formulation 1 elements can be assigned TYPE=2 which treats combined modes of shear and compression.
- If mat_126 is used, try ELFORM = 0.
- Try EFG formulation (*section_solid_EFG). Use only where deformations are severe as this formulation is very expensive. Use only with hex elements.
***********************************************************
See also: instablity.tips
7.Energy balance 能量平衡
GLSTAT(参见*database_glstat)文件中报告的总能量是下面几种能量的和:内能internal energy
动能kinetic energy
接触(滑移)能contact(sliding) energy
沙漏能houglass energy
系统阻尼能system damping energy
刚性墙能量rigidwall energy
GLSTAT中报告的弹簧阻尼能‖Spring and damper energy‖是离散单元(discrete elements)、安全带单元
(seatbelt elements)内能及和铰链刚度相关的内能(*constrained_joint_stiffness…)之和。而内能‖Internal Energy‖包含弹簧阻尼能‖Spring and damper energy‖和所有其它单元的内能。因此弹簧阻尼能‖Spring and damper energy‖是内能‖Internal energy‖的子集。
由SMP 5434a版输出到glstat文件中的铰链内能‖joint internal energy‖跟*constrained_joing_stiffness不相关。它似乎与*constrained_joint_revolute(_spherical,etc)的罚值刚度相关连。这是SMP 5434a之前版本都存在的缺失的能量项,对MPP 5434a也一样。这种现象在用拉格朗日乘子(Lagrange Multiplier)方程时不会出现。
与*constrained_joint_stiffness相关的能量出现在jntforc文件中,也包含在glstat文件中的弹簧和阻尼能和内能中。回想弹簧阻尼能‖spring and damper energy‖,不管是从铰链刚度还是从离散单元而来,总是包含在内能里面。
在MATSUM文件中能量值是按一个part一个part的输出的(参见*database_matsum)。
沙漏能Hourglass energy仅当在卡片*control_energy中设置HGEN项为2时才计算和输出。同样,刚性墙能和阻尼能仅当上面的卡片中RWEN和RYLEN 分别设置为2时才会计算和输出。刚性阻尼能集中到内能里面。质量阻尼能以单独的行‖system damping energy‖出现。由于壳的体积粘性(bulk viscosity)而产生的能量耗散(energy dissipated)在版本970.4748之前是不计算的。在后续子版本中,
施工方面常见问题汇总,超经典! 施工方面常见问题汇总,超经典!不需要铭记于心,也要了解这些常见问题! 1、【求助】柱砼为C60,梁板砼为C30,如何施工 答:1、一般必须加钢板网,距柱边300—500,45度斜设.通常固定上工人操作都不太好.方案写细点涉及收措施费. 2、不同标号砼浇筑注意两点 首先,梁柱节点区必须保证是高标号,所以退出柱边300—500,通常节点区砼由塔吊配合浇筑;至于一般必须设钢板网是因为梁高700左右,节点区钢筋密集,浇筑时一定要用振动棒,设了钢板网砼也会流淌相当距离. 其次,梁柱间尽量不留施工缝.一旦监理照章办事,出现施工缝时你就知道什么是焦头烂额. 2、【求助】基础分布钢筋 答:如果是指中间的搭接:就是35D,(分布钢筋也一样),要不你焊接得了(我们一般都是焊接). 如果楼主问的是指基础十字交叉或丁字交叉的时候这种情况,则:基础分布钢筋不需要搭接.具体的情况的确应该由设计院确定,对这个情况有详细的说明,我想你们那里也应该有相应的图集吧. 3、【求助】混凝土道路施工有什么么特别注意的地方吗 答:(1)注意路面交叉处主副路的位置和标高.
(2)一般在交叉处要设置胀缝及传力杆. (3)总之,熟读图纸,按照图纸做就没问题. 4、【求助】请教大虾:做一个工程的技术员要看那些参考书 答:还不清楚你说的技术方向的岗位是指哪些岗位.如果是项目技术负责人,要求掌握的知识和技能就要相当的全面:施工、质量、安全,如果在私人老板这里干,技术负责人还要懂预算.我建议你先从技术员做起最好是跟个师傅做施工员.因为施工员面对全局碰到的事情较多,有利于锻炼和提高.当然还要加强理论学习,一些必要的专业书还是要看的,学校的教材就不用看的太多了.《建筑施工手册》虽然比较全面,但是内容相对较深.其实并不适合刚毕业参加工作的人看.先看一些岗位性较强的书如《施工员必读》《预算员必读》之类的书. 5、【求助】钢结构求知钢构土建基础中间有挖孔,甲方提供H型钢.H型钢柱底板下有一小H型钢插入基础孔内,底座开了两小孔灌无收缩灌浆料. 1、H型钢焊接拼接有无特别要求, 2、现是要土建将基础找平再安装钢构,还是钢构装好后再进行土建基础的二次灌浆. 答:个人认为:H型钢的焊接就是执行一般的焊接标准,没有什么特殊标准;至于与基础的连接,有先预埋和后预埋两种方式,但如果可能的话,建议采用先预埋的方式,而先预埋是应该有预埋铁件的,H型钢必须和预埋铁件连接才有用,你所说的方法看不出有没有预埋铁件,所以不敢妄加评论.
1 如何处理LS-DYNA中的退化单元? 在网格划分过程中,我们常遇到退化单元,如果不对它进行一定的处理,可能会对求解产生不稳定的影响。在LS-DYNA中,同一Part ID 下既有四面体,五面体和六面体,则四面体,五面体既为退化单元,节点排列分别为N1,N2,N3,N4,N4,N4,N4,N4和N1,N2,N3,N4,N5,N5,N6,N6。这样退化四面体单元中节点4有5倍于节点1-3的质量,而引起求解的困难。其实在LS-DYNA的单元公式中,类型10和15分别为四面体和五面体单元,比退化单元更稳定。所以为网格划分的方便起见,我们还是在同一Part ID下划分网格,通过*CONTROL_SOLID关键字来自动把退化单元处理成类型10和15的四面体和五面体单元。 2 LS-DYNA中对于单元过度翘曲的情况有何处理方法 有两种方法: 1. 采用默认B-T算法,同时利用*control_shell控制字设置参数BWC=1,激活翘曲刚度选项; 2. 采用含有翘曲刚度控制的单元算法,第10号算法。该算法是针对单元翘曲而开发的算法,处理这种情况能够很好的保证求解的精度。 除了上述方法外,在计算时要注意控制沙漏,确保求解稳定。 3 在ANSYS计算过程中结果文件大于8GB时计算自动中断,如何解决这个问题? 解决超大结果文件的方案: 1. 将不同时间段内的结果分别写入一序列的结果记录文件; 2. 使用/assign命令和重启动技术; 3. ANSYS采用向指定结果记录文件追加当前计算结果数据方式使用/assign指定的文件,所以要求指定的结果记录文件都是新创建的文件,否则造成结果文件记录内容重复或混乱。特别是,反复运行相同分析命令流时,在重复运行命令流文件之前一定要删除以前生成的结果文件序列。具体操作方法和过程参见下列命令流文件的演示。 4关于梁、壳单元应力结果输出的说明 问题:怎样显示梁单元径向和轴向的应力分布图(我作的梁单元结果只有变形图DOF SOLUTIN –Translation,但是没有stress等值线图,只有一种颜色)和壳单元厚度方向的应力、变形图(我们只能显示一层应力、变形,不知道是上下表层或中间层的结果)。
1、存在问题:外墙铺贴外墙砖,阴阳角的嵌缝剂吸水导致窗框周围渗水 解决措施:外墙砖改为涂刷质感漆,在上窗框处预留滴水槽 2、存在问题:现浇混凝土板内预埋PVC电管时,混凝土板经常沿管线出现裂缝。解决措施:钢筋混凝土板中预埋PVC等非金属管时,沿管线贴板底(板底主筋外侧)放置钢丝网片,后期内墙、棚顶等满铺纤维网格布,刮腻子抹平。 3、存在问题:首层隔墙自身发生沉降,墙身出现沉降裂缝。 解决措施:首层隔墙下应设钢筋砼基础梁或基础,不得直接将隔墙放置在建筑地面上,不得采用将原建筑地面中的砼垫层加厚(元宝基础)作为隔墙基础的做法。 4、存在问题:凸出屋面的管道、井、烟道周边渗漏。 解决措施:凸出屋面的管道、井、烟道周边应同屋面结构一起整浇一道钢筋混凝土防水反梁,屋面标高定于最高完成面以上250mm。 5、存在问题:门窗耐候胶打胶不美观 解决措施:门窗预留洞口尺寸跟现场测量尺寸存在误差,造成窗框与墙垛的间隙不均匀,打胶不美观。建议在抹灰过程中安装窗户副框,副框对门窗起到一个定尺、定位的作用。弥补门窗型材与墙体间的缝隙,利于防水;增强门窗水平与垂直方向的平整度。有利于门窗的安装,使其操作性更好。 6、存在问题:室内地面出现裂纹 解决措施:出现裂纹的原因是施工中细石混凝土的水灰比过大,混凝土的坍落度过大,分格条过少。在处理抹光层时加铺一道网格布,网格布分割随同分格条位置一同断开。 7、存在问题:内墙抹灰出现部分空鼓 解决措施:空鼓原因,内墙砂浆强度较低,抹灰前基层清理不干净,不同材料的墙面连接未设置钢丝网;墙面浇水不透,砂浆未搅拌均匀。气温过高时,砂浆失水过快;抹灰后未适当浇水养护。解决办法,抹灰前应清净基层,基层墙面应提前浇水、要浇透浇匀,当基层墙体平整和垂直偏差较大时,不可一次成活,应分层抹灰、应待前一层抹灰层凝结后方可涂抹后一层的厚度不超过15mm。 9、存在问题:吊顶顶棚冬季供暖后出现凝结水,造成吊顶发霉 原因:冬季供暖后,管道井内沙层温度升高,水蒸气上升遇到温度较低的现浇板,形成凝结水,凝结水聚集造成吊顶发霉。解决措施:管道井底部做防水层截断水蒸气上升渠道。 10、存在问题:楼顶太阳能固定没有底座,现阶段是简单用钢丝绳捆绑在管道井上固定 解决措施:建议后期结构施工中,现浇顶层楼板时一起浇筑太阳能底座。 11、存在问题:阳台落水管末端直接通入预留不锈钢水槽,业主装修后,楼上的垃圾容易堵塞不锈钢水槽,不易清扫。 解决措施:建议后在阳台上落水管末端预留水簸萁,益于后期的清扫检查。12、存在问题:卫生间PVC管道周围出现渗水现象 原因,出现渗漏的卫生间PVC管道,周围TS防水卷材是冬季低于5℃的环境下施工的,未及时浇筑防水保护层,防水卷材热胀冷缩,胶粘剂开裂,造成PVC
施工图设计中常见问题 一.图纸表达: 1.图纸不满足甲的深度要求,漏项较多,如缺出入口钢结构雨棚、室外坡道顶棚等。 2.图纸不满足甲的技术标准及部品标准,如构造做法标准、门窗标准、栏杆标准、空调位 标准、电梯标准等。 3.住宅小区的不同楼号建筑标准不一致,如构造做法、门窗立面、节能设计等。 4.外墙上应予留的洞口水平和竖向定位不全,留洞没有和结构、水暖、电气专业、人防专 业图核对,出现漏留、冲突现象。 5.地下室平面轴网应与地上建筑物轴网有明确的对应关系,地下室平面中应标注与地上建 筑物轴网的相对关系尺寸。 6.总平面中应标注地下室外轮廓线,并在四角处标注轴线、号,轴线交点处标注坐标,保 证出图前总图和单体建筑形成统一整体,避免因设计过程中地上地下单体的局部变动,而总平面未跟踪变动导致的不对照。 7.设计人员提供的审核校对图普遍对设计说明和总平面位置图不重视,甚至不提供总平面 位置图。 二.防火设计: 1.没有结合不同的功能分区进行防火分区划分。 2.防火墙上的门洞没有设置甲级防火门。 3.防火分区两侧的门窗洞口防火间距不足时,没有相应防火分隔措施。 4.上下层之间门窗洞口防火间距不足时,没有相应防火分隔措施。 5.楼梯间及前室与相邻部位门窗洞口防火间距不足时,没有相应防火分隔措施。 6.火灾危险性较大的房间的房门及外窗洞口没有采取防火分隔措施。 7. 不同的功能分区在一层共用出入口,如住宅配套用房与住宅、商业与住宅等。 8. 对汽车库、修车库、停车场设计防火规的理解: 1)地面上无人员进入的机械停车库,可以理解为停车场,停车场的定义是停车的露天场地 或构筑物,很明显它是用于停车的构筑物。这样它与民用建筑的防火间距最少为6米。 2)对于敞开式汽车库,要注意是指多个防火分区都要达到定义的要求,如对于平面尺度很 大的,有可能个别防火分区不直接对外通风,这样就不能认定它是敞开的。 3)新规对汽车库、修车库、停车场的分类增加了面积控制项,是车位和面积的双控,不要 试图少计算车位规避汽车疏散坡道不够的手法。 4)防火规中计算汽车疏散口的数量時,单车道即可。但是建通评价是按双车道计算的,单 车道只能算半个。
摄影新手拍摄常见的问题及解决办法 1. 太早放弃 这一点很多人都犯过。他们在相机和摄影技巧课程/书籍上花了大把的钱,旅行去一个很棒的拍摄地点,然后很快就——因为有点累、饿或者无聊——放弃了。还有很多人没有在一个地方花太多精力,也许是觉得第一张照片就足够好了。但经验告诉我们,最好的照片往往出现在尝试过所有视角之后。 如今网络上已经有不计其数的照片,如果你想得到一些不同的结果,就必须付出更多时间和精力。你比别人多坚持一会儿,就能成为更好的摄影师。 2. 用广角镜头拍人像 当你打开便携数码相机时,镜头一般都位于广角端。大部分单反相机镜头为了容易装进摄影包,在收起时也位于广角端。因此广角就成了很多人的默认选择。但是广角镜头的畸变并不是非常适合人像摄影,特别是拍人物特写时。除非你刻意追求这种效果,否则请记得把镜头转到长焦端。长焦镜头往往能拍出更有魅力的人像照片。 3. 拍出晃动模糊的照片 这一点也许人人都应该检讨一下。在1/8s甚至1/80s这种快门速度下,相机对晃动非常敏感。初学者往往意识不到,而略有经验的摄影师则认为自己端得很稳。如非刻意,抖动模糊的照片通常都不受欢迎。很多摄影比赛和杂志都不会用模糊的照片。 拍出清晰照片最重要的一点就是保证相机稳定,而最好的方法就是用三脚架。但是我们都不能总是随身带着三脚架,这也没有关系。现在很多镜头都有防抖功能,而且相机的高感效果也在不断提高。所以除了寻找支撑物尽量保持稳定之外,也不要害怕提高ISO感光度。 4. 拍建筑时靠得太近 在近处拍摄建筑,为了取到全景就需要仰起相机,或者使用广角镜头。这样做会让垂直线变成向一个点汇聚的斜线,或者出现很明显的畸变。如何才能做到让平行线在照片中也是平行线呢?理论上讲,你需要让相机焦平面与建筑物平面保持平行。这其中涉及很多摄影技术和方法。 一般来说,你可以把相机举高而不是仰拍。如果在建筑物对面有其他建筑可以登上拍照,一定要利用起来。为了减少畸变,尽量从远处用长焦距拍摄,而不是在近处用广角。但是一定要注意不要让无关的东西进入画面。 5. 照片中没有明确的主体 最后,多数照片永远不会被注意到,就是因为它们没有明确的主体,或者有太多的杂乱元素,令人不知所云。这是由于我们观察世界,与相机记录景象之间的不同造成的。我们会专注于自己想看的东西,忽略其他东西,但相机会忠实地记录下镜头前的一切。 要避免这个问题,最常用的方法是靠近拍摄。一般人会希望拍下整个场景,所以用最广的焦距,站在最远处拍摄。结果照片很小,也没有什么冲击力。大胆地靠近拍摄吧。另外,也要学习运用光线和色彩来突出主体。养成检查背景的习惯,明白自己都在拍些什么。 在摄影实践中,经验不足的初学者,常会出现一些失误。下面哈尔滨完美动力小编简单的和大家一下几个常见的问题及解决办法!仅供参考! 1、用广角镜头拍出的照片四角发黑 主要是由于闪光灯覆盖面与广角镜头的视场角不匹配。老式闪光灯设计的闪光覆盖面大都只能与35mm的小广角镜头配套,28mm广角镜头的视场角比35mm镜头大12度,因此使画面四周受不到光而发黑。防止的办法有二条,一是在灯光上加散光罩,使闪光成为散射光,以扩大覆盖面;二是用白纱布蒙住灯头,让光线散射,使整个画面都能均匀受光。 2、画面影调模糊
一、影响穿透的一些因素解释 I.接触厚度 接触厚度定义的是一个参数——当接触体/面相互穿透的距离大于接触厚度时,程序将不计算这个接触,即认为没有接触了。什么是接触厚度与距离?在自动接触中,接触厚度是一个默认值,大概是面厚度的几倍,在普通接触中,接触厚度无穷大。 II.壳厚度和接触厚度 1. 壳厚度:影响刚度和单元质量; 2. 接触厚度: ①决定解除中的厚度偏移量; ②并不影响刚度或壳体质量; ③默认接触厚度等于壳厚度; ④可以在*CONTACT 或*PART_CONTACAT 中直接缩放接触厚度; ⑤在穿透节点被释放之前影响最大允许穿透深度。 III.运动速度对穿透的影响 如果物体相对运动速度过大,在一个时间步长中所走过的距离会远超过一个单元的尺寸,若缩小时间步长,即缩小在一个时间步长内所走过的距离和单元尺寸的差异,基础检查可以正常进行,若初速度过高,会搜索不到接触,计算会出现问题。 IV.非对称接触算法中,主从面的定义原则 ①粗网格表面定义为主面,细网格表面为从面; ②主从面相关材料刚度相差悬殊,材料刚度大的一面为主面;
③平直或者凹面为主面,凸面为从面。 V.接触刚度的影响 穿透可以认为是一种虚拟穿透,如果设定的穿透刚度(fkn)值,就可以减小这种穿透, 但却不可避免。如果fkn 值过大,会使到那元刚度病态,而不能求解。 二、穿透的可能解决方案 I.接触方面: 1. 修改接触类型,尝试自动接触类型: ①STS(面面接触),当一个体的表面穿透另外一个体的表面是创建 ②SS(单面接触),当一个体的表面自身接触或者接触另一个体的表面时创建 2. 接触定义存在问题: ①增加接触刚度因子 ②改变接触面的主从设置,将刚体设置为主面,同时使用单向接触 ③修改关键字CONTROL_CONTACT中RWPNAL=2 3. 接触穿透距离超过了接触厚度,从而不再计算接触; 4. 如果两个接触体的材料属性和网格差别较大,可以修改SOFT值为1 或者2. 5. 接触群组设置不直接用PART,将可能接触的地方设置为segment; 6. 修改摩擦系数: Fs和Fd通常设置为相同的值,避免额外的噪声产生。 7.注意设定接触厚度;
1、 【求助】柱砼为C60,梁板砼为C30,如何施工? 答: 1、 一般必须加钢板网,距柱边300—500,45度斜设。通常固定上工人操作都不太好。方案写细点涉及收措施费。 2、不同标号砼浇筑注意两点 首先,梁柱节点区必须保证是高标号,所以退出柱边300—500,通常节点区砼由塔吊配合浇筑;至于一般必须设钢板网是因为梁高700左右,节点区钢筋密集,浇筑时一定要用振动棒,设了钢板网砼也会流淌相当距离。 其次,梁柱间尽量不留施工缝。一旦监理照章办事,出现施工缝时你就知道什么是焦头烂额。 2、【求助】基础分布钢筋? 答:如果是指中间的搭接:就是35D,(分布钢筋也一样),要不你焊接得了(我们一般都是焊接)。 如果楼主问的是指基础十字交叉或丁字交叉的时候这种情况,则: 基础分布钢筋不需要搭接。 具体的情况的确应该由设计院确定,四川有一本专门的图集(川 03G601《砌体结构基础》四川省建筑设计院),对这个情况有详细的说明,我想你们那里也应该有相应的图集吧。 3 、【求助】混凝土道路施工有什么么特别注意的地方吗? 答: (1)注意路面交叉处主副路的位置和标高。 (2)一般在交叉处要设置胀缝及传力杆。 (3)总之,熟读图纸,按照图纸做就没问题。 4、【求助】请教大虾:做一个工程的技术员要看那些参考书? 答:还不清楚你说的技术方向的岗位是指哪些岗位。如果是项目技术负责人,要求掌握的知识和技能就要相当的全面:施工、质量、安全,如果在私人老板这里干,技术负责人还要懂预算。 我建议你先从技术员做起最好是跟个师傅做施工员。因为施工员面对全局碰到的事情较多,有利于锻炼和提高。 当然还要加强理论学习,一些必要的专业书还是要看的,学校的教材就不用看的太多了。《建筑施工手册》(第四版)虽然比较全面,但是内容相对较深。其实并不适合刚毕业参加工作的人看。先看一些岗位性较强的书如《施工员必读》《预算员必读》之类的书。 5、【求助】钢结构求知 钢构土建基础中间有挖孔,甲方提供H型钢。H 型钢柱底板下有一小H型钢插入基础孔内,底座开了两小孔灌无收缩灌浆料。 1、H型钢焊接拼接有无特别要求, 2、现是要土建将基础找平再安装钢构,还是钢构装好后再进行土建基础的二次灌浆。 答:个人认为:H型钢的焊接就是执行一般的焊接标准,没有什么特殊标准;至于与基础的连接,有先预埋和后预埋两种方式,但如果可能的
前期: ?第一部分:图片之重“曝光” 图片基本要素曝光 曝光三要素:光圈、快门、感光度 光圈:控制进光量大小、用F值表示,当F值越小,进光量越大,当F值越大的时候进光量越小,光圈越大的时候进光量越大光圈越小的时候进光量越小。 快门:控制进光量的时间长短,当快门速度越慢的时候进光量越多,快门速度越快的时候进光量越少。 感光度:对光线的感知度敏感程度,用ISO表示,ISO决定呈像质量,DISO感光度低,呈像越好,感光度高,的时候呈像不好,容易出现噪点。
快门速度:快门速度越慢,越容易看到物体的流线。 感光度:感光度越低,呈像质量越好,感光度越低,呈像质量越差,容易出现噪点。 成像不好:噪点较多,清晰度不够. 控制好曝光是一张图片成像的基本标准。
手机拍照与单反拍照的区别:手机是恒定光圈固定焦距,所以没有单反拍摄这么麻烦。
? 手机上的相机上点一下都有黄颜色的方框焦点,手机的焦点可以控制手机的曝光,我们选好一个焦点,按住焦点不动的时候可以出现手机曝光调节,当手指向上调的时候就是调高曝光过曝了,手指向下调的时候就是降低曝光,调到最低的时候就是一片黑暗了。初学者做到曝光正常就可以了。
从上面三张图片我们可以看出对焦点的不同,就影响整个曝光的不同。第一张图片选择比较暗的部分,要使暗的部分曝光正常,点暗的部分曝光正常高光,亮的部分越亮,第三张图片,选择天空曝光正常,天空曝光正常了,选择亮的部分,暗的部分越暗。拍摄明暗差距比较大的时候尽量选择光线一般,不要选择太亮页也不要太暗,中间这张就是曝光比较正常状态。总结一下,焦点对准暗的部分,亮的部分就会越亮,对准亮的部分,暗的部分就会越暗。 ?HDR:高动态范围成像<可提供更多的动态范围与图像细节,建议拍摄风光照时候使用>
1如何处理LS-DYNA中的退化单元?在网格划分过程中,我们常遇到退化单元,如果不对它进行一定的处理,可能会对求解产生不稳定的影响。在LS-DYNA 中,同一Part ID 下既有四面体,五面体和六面体,则四面体,五面体既为退化单元,节点排列分别为N1,N2,N3,N4,N4,N4,N4,N4和N1,N2,N3,N4,N5,N5,N6,N6。这样退化四面体单元中节点4有5倍于节点1-3的质量,而引起求解的困难。其实在LS-DYNA的单元公式中,类型10和15分别为四面体和五面体单元,比退化单元更稳定。所以为网格划分的方便起见,我们还是在同一Part ID下划分网格,通过*CONTROL_SOLID关键字来自动把退化单元处理成类型10和15的四面体和五面体单元。 2 LS-DYNA中对于单元过度翘曲的情况有何处理方法 有两种方法: 1. 采用默认B-T算法,同时利用*control_shell控制字设置参数BWC=1,激活翘曲刚度选项; 2. 采用含有翘曲刚度控制的单元算法,第10号算法。该算法是针对单元翘曲而开发的算法,处理这种情况能够很好的保证求解的精度。 除了上述方法外,在计算时要注意控制沙漏,确保求解稳定。 3在ANSYS计算过程中结果文件大于8GB时计算自动中断,如何解决这个问题? 解决超大结果文件的方案: 1. 将不同时间段内的结果分别写入一序列的结果记录文件; 2. 使用/assign命令和重启动技术; 3. ANSYS采用向指定结果记录文件追加当前计算结果数据方式使用/assign指定的文件,所以要求指定的结果记录文件都是新创建的文件,否则造成结果文件记录内容重复或混乱。特别是,反复运行相同分析命令流时,在重复运行命令流文件之前一定要删除以前生成的结果文件序列。具体操作方法和过程参见下列命令流文件的演示。 4关于梁、壳单元应力结果输出的说明 问题:怎样显示梁单元径向和轴向的应力分布图(我作的梁单元结果只有变形图DOF SOLUTIN –Translation,但是没有stress等值线图,只有一种颜色)和壳单元厚度方向的应力、变形图(我们只能显示一层应力、变形,不知道是上下表层或中间层的结果)。
土建施工中常见问题及处理方法 很多刚入施工的新手都会碰到一些常见的问题,本文总结了施工中常见的问题和处理办法,供新手学习,希望能帮助到需要的人…… 一、蜂窝 常见问题有: (1)配合比计量不准,砂石级配不好; (2)搅拌不匀; (3)模板漏浆; (4)振捣不够或漏振; (5)一次浇捣混土太厚,分层不清,混凝土交接 不清,振捣质量无法掌握; (6)自由倾落高度超过规定,混凝土离析、石子赶堆; (7)振捣器损坏,或监时断电造成漏振; (8)振捣时间不充分,气泡未排除。 防治措施为: ①严格控制配合比,严格计量,经常检查; ②混凝土搅拌要充分、均匀; ③下料高度超过2m要用串筒或溜槽; ④分层下料、分层捣固、防止漏振; ⑤堵严模板缝隙,浇筑中随时检查纠正漏浆情况。 处理措施为: ①对小蜂窝,洗刷干净后1:2水泥砂浆抹平压实; ②较大蜂窝,凿去薄弱松散颗粒,洗净后支模,用高一强度等级的细石混凝土仔细填塞捣实; ③较深蜂窝可在其内部埋压浆管和排气管,表面抹砂浆或浇筑混凝土封闭后进行水泥压浆处理。 二、麻面 常见问题有: (1)同“蜂窝”原因; (2)模板清理不净,或拆模过早,模板粘连; (3)脱模剂涂刷不匀或漏刷; (4)木模未浇水湿润,混凝土表面脱水,起粉;
(5)浇注时间过长,模板上挂灰过多不及时清理,造成面层不密实; (6)振捣时间不充分,气泡未排除。 防治措施为: ①模板要清理干净,浇筑混凝土前木模板要充分湿润,钢模板要均匀涂刷隔离剂; ②堵严板缝,浇筑中随时处理好漏浆; ③振捣应充分密实。 处理方法: 表面做粉刷的可不处理,表面不做粉刷的,应在麻面部位充分湿润后用水泥砂浆抹平压光。 三、孔洞 常见问题有: (1)同蜂窝原因; (2)钢筋太密,混凝土骨料太粗,不易下灰,不易振捣; (3)洞口、坑底模板无排气口,混凝土内有气囊。 防治措施为: ①在钢筋密集处采用高一强度等级的细石混凝土,认真分层捣固或配以人工插捣; ②有预留孔洞处应从其两侧同时下料,认真振捣; ③及时清除落人混凝土中的杂物。 处理方法: 凿除孔洞周围松散混凝土,用高压水冲洗干净, 立模后用高一强度等级的细石混凝土仔细浇筑捣固。 四、露筋 常见问题有: (1)同“蜂窝”原因; (2)钢筋骨架加工不准,顶贴模板; (3)缺保护层垫块; (4)钢筋过密; (5)无钢筋定位措施、钢筋位移贴模。 防治措施为 ①浇筑混凝土前应检查钢筋及保护层垫块位置正确,木模板应充分湿润; ②钢筋密集时粗集料应选用适当粒径的石子; ③保证混凝土配合比与和易性符合设计要求。 处理方法:
笔者在数年建筑工程施工图审查工作中,通过多项建筑工程的施工图审查,发现了建筑设计中总平面图设计、建筑说明、建筑平面、立面、剖面、建筑构件有关深度设计及强制性条文等内容设计中较为常见的问题,现分别总结如下: 一、总平面布置图 送审的施工图文件中,总平面布置图基本上都有,但表达深度差别较大,大 部分工程只做到平面定位图,不符合《建筑工程设计文件编制深度规定》的有关 要求。主要问题有: 1.总平面图要有一定的范围。只有用地范围不够,要有场地四邻原有规划的 道路、建筑物、构筑物,多数施工图只有用地范围内的布置图。 2.保留原地形和地物。场地测量坐标网及测量标高,包括场地四邻的测量坐 标(或定位尺寸),有些工程的总图设计往往无保留。 3.竖向设计。往往只有标注建筑物的±0.000设计标高的相对场地的测量标 高数值,有的只有标注室内外高差数而已。结果是: (1)竖向设计标高不符合规划部门的控制标高。 (2)场地内与场地外围的城市道路标高不衔接,不合理。 (3)场地及其道路的标高不利于排水。 (4)场地内道路无设计标高,特别是交接处、建筑物的入口处,也无标注道 路坡长、坡向、坡度以及地面的关键性标高,也无路面的设计断面。 4.没土方工程平衡设计。盲目的竖向设计,往往会带来不必要的挖方或填方, 增加造价,造成经济损失。 5.总图设计没有必要的详图设计。比如道路横断面、路面结构,反映管线上 下、左右尺寸关系的剖面图,以及挡土墙、护坡排水沟、广场、活动场地、停车 场、花坛绿地等详图,场地的排水、场地内道路与城市道路的关系,给施工带来 困难,也无法保证总图的合理性。 6.消防车道宽度不满足消防要求。消防车道距离高层建筑外墙小于5 米,不满足消防登高面要求。 二、建筑设计说明部分 1.装饰做法光是文字说明表达不完整。最好是有各种材料做法一览表+各部 位装修材料一览表方能完整地表达清楚,少数能做到,多数工程还只是文字说明。 总说明中占地面积一般都缺标注。
数码相机拍摄中常见问题解决方法 有的时候,我们经常会发现数码照片里面的景物和原来我们眼睛看到的景物的颜色发生了变化,有的时候偏红,有的时候偏黄。这是怎么回事呢?这主要是由于白平衡没有调节好的原因。白平衡调节功能的作用和在传统彩色摄影时加色温转换滤色镜的作用是类似的,目的是达到准确的色彩还原,只是数码相机的色温不需要在镜头上加滤镜,而是采用电路调整方式,靠电子线路改变红、绿、蓝三基色的混合比例,把光线中偏多的颜色成分修正掉。多数数码相机中都有自动的白平衡调节,这种功能在一般条件下还是比较准确的,但是在一些复杂的条件拍摄下就很难保证了。事实上,我们接触到的光源一般都比较复杂。所以我们在拍摄的时候一定要养成先观察周围的环境,拍照之前就把白平衡调节好的习惯。有一些数码相机中的白平衡调节有自调模式,一般用上面一个矩形的小方块,下面两个小三角的符号来表示。这种模式的白平衡调节是让你将相机对准拍摄现场白色的物体,然后半按下快门,此时,相机会自动记录这种光线下白色的状态,依据这个数值,就可以在接下来的拍摄中正确的对色彩进行还原了。我建议大家在相机有这种白平衡调节模式的条件下使用它,多数情况下,它更为精确。 一、拍出来的照片是虚的 这主要可能是有几个因素造成的。首先,由于数码相机的快门延迟时间比较长,所以人的手就不容易拿稳,这是拍
出来的影像就会是虚的,原因就是在于手的抖动。一般来讲,人手的抖动可以忽略不计的情况是在快门度和焦距成倒数关系,以及比这个速度更快的时候。所以在光线不是很好,速度较慢的时候,我们最好借助角架或者固定不会动的物体来固定相机。其次,照片是虚的还可能是由于焦点没有选择好的原因。很多时候,我们只注意到了将要拍的景物放在取景框里面,而忽略了将焦点对准要拍的主体,那么照片上的情况就会是主体不实。再次,就是主体的位置发生了移动,由于数码相机的快门较慢,造成从按下快门到拍摄完成所用的时间相对较长,此时主体就很容易发生了位置的移动,在这种情况下拍出来的照片也会是虚的。解决以上问题的方法,一个是利用和借助固定不动的物体来固定相机,另外一个就是可以平举相机,使相机随着拍摄的物体一起移动,这样,照片中虽然背景是模糊的,但是主体却是清晰的。后边的方法经常用于拍摄移动较快的物体,例如车子等等。 二、拍好的照片上有很多小点 这种情况多数出现在夜景的拍摄中。这是由于感光度高造成的。就是我们所说的照片中的噪音。要知道感光度(ISO)的数值越高,画面的质量就会越粗糙,感光度的数值越低,画面就会越细腻。但是,感光度意味着对光的敏感度高,所以,在弱光拍摄的时候,我们常常要选择高感光度,那么,如果相机本身的降噪系统不好的话,就会造成画面上出现噪音的情况。想要避免这样的情况,我们就需要人为地将感光度调的稍低一些,然后用相对较长的曝光时间来补偿光线的
LS-DYNA常见问题汇总 1.0 资料来源:网络和自己的总结yuminhust2005 Copyright of original English version owned by relative author. Chinese version owned by https://www.doczj.com/doc/6e6154131.html,/Kevin 目录 1.Consistent system of units 单位制度 (2) 2.Mass Scaling 质量缩放 (4) 3.Long run times 长分析时间 (9) 4.Quasi-static 准静态 (11) 5.Instability 计算不稳定 (14) 6.Negative Volume 负体积 (17) 7.Energy balance 能量平衡 (20) 8.Hourglass control 沙漏控制 (27) 9.Damping 阻尼 (32) 10.ASCII output for MPP via binout (37) 11.Contact Overview 接触概述 (41) 12.Contact Soft 1 接触Soft=1 (45) 13.LS-DYNA中夹层板(sandwich)的模拟 (47) 14. 怎样进行二次开发 (50)
1.Consistent system of units 单位制度 相信做仿真分析的人第一个需要明确的就是一致单位系统(Consistent Units)。计算机只认识0&1、只懂得玩数字,它才不管你用的数字的物理意义。而工程师自己负责单位制的统一,否则计算出来的结果没有意义,不幸的是大多数老师在教有限元数值计算时似乎没有提到这一点。见下面LS-DYNA FAQ中的定义:Definition of a consistent system of units (required for LS-DYNA): 1 force unit = 1 mass unit * 1 acceleration unit 1 力单位=1 质量单位× 1 加速度单位 1 acceleration unit = 1 length unit / (1 time unit)^2 1 加速度单位= 1 长度单位/1 时间单位的平方 The following table provides examples of consistent systems of units. As points of reference, the mass density and Young‘s Modulus of steel are provided in each system of units. ―GRA VITY‖ is gravitational acceleration.
房屋建筑工程施工中常见问题与解决方法
房屋建筑工程施工中常见问题与解决方法 一、结构设计容易出现的设计问题 【一】因施工原因造成问题 1、部门、专业间配合类 存在问题1:女儿墙、沉厕管井侧墙、屋面天窗壁等,大多是在钢筋混凝土板上为砌筑的砖或砌块墙体,砌体和混凝土2种不同材料界面处易形成裂缝,造成漏水。解决措施:所有建筑要求做泛水处,均采用现浇混凝土泛水,泛水高度如建筑无特定要求的,按200mm高。 存在问题2:梁与板混凝土强度等级不同,施工不便。解决措施:同时浇筑的梁、板混凝土强度等级应一致。 存在问题3:地下室后浇带要在至少60d后方可浇筑,但地下室外墙的防水及基坑回填工程却需要先行施工,如何处理。 解决措施:地下室外墙后浇带处,在外侧设一通高预制钢筋混凝土板,该板置于地下室外墙防水层内侧,建筑设计需考虑该处的防水做法,结构设计需考虑该板在后浇带尚未浇筑前用于拦挡回填土。 存在问题4:有些墙垛的尺寸太小,不便于砌筑且质量不宜保证。 解决措施:与混凝土墙、柱相连的墙垛尺寸≤120mm×120mm或某一边长小于120mm时,采用现浇混凝土墙垛。
2、现浇混凝土楼板裂缝类 存在问题1:屋面板混凝土强度等级偏高,易产生裂缝而漏水。 解决措施:屋面结构混凝土强度等级尽可能≤C25级。 存在问题2:地下室底板混凝土强度等级偏高,易产生裂缝而漏水。 解决措施:施工周期较长的大体积混凝土(如地下室底板、外墙等),设计时宜考虑混凝土的后期强度,可采用不少于60d龄期的混凝土强度。 存在问题3:地下室底板及侧墙后浇带新旧混凝土界面处易产生裂缝,经常出现渗漏。 解决措施:后浇带接缝处应做成企口;主筋在后浇带处按断开处理;采用膨胀止水带。 存在问题4:现浇混凝土板内预埋PVC电管时,混凝土板经常沿管线出现裂缝。 解决措施:钢筋混凝土板中预埋PVC等非金属管时,沿管线贴板底(板底主筋外侧)放置300mm宽?1.0×10×10钢丝网片。 存在问题5:现电梯间前室有大量设备管线暗埋在混凝土板内,造成结构隐患,易出现裂缝。 解决措施:预埋管线非常多的板(如高层建筑电梯前室等),板厚宜按结构设计所需板厚+30mm。 存在问题6:屋面等有防水要求的混凝土板,对裂缝控制要求较严,如何控制裂缝。 解决措施:有防水要求的屋面板结构混凝土内添加抗裂纤维。添加量由招标中心或总承包提供中标产品参数,由设计单位确定。 3、防止首层地坪沉陷类
市面上评价较好的手机剪辑软件:VUE QUIK 一闪 闪光灯+反差色=胶片的感觉 利用全景模式——人物分身的效果 延时摄影——时光飞逝的感觉 手机拍照三大点:对焦、测光、快门 HDR——主要用于‘’明暗对比比较强烈的时候”、为了展示场景更多的细节。拍摄“井”字法,拍摄时注意人与场景的互动 横构图——平静、稳定、宽广 竖构图——更能关注到视觉两边的内容 日常拍照常见搭配: 对比色——将色环上对比强的颜色组合进行搭配。{橙色--青色红色---绿色} 类比色(相近色)——天空(上衣) 草地(下衣) 逆光拍摄:1.选择时间段(日出之前或之后) 2.尽量选择空旷的地方 3.大光比情况下建议拍摄剪影照 4.掌握逆光拍摄中的测光位置
服装搭配: 1选择服装搭配和场景色调融合 2.规避身材的缺陷(肥胖驼背等) 3.减少拍摄时衣服的颜色 4.增加一些小配件 旅行拍摄技巧: 1.在旅行时尝试拍摄特写 2.有些景点等到没人的时候拍 3.拍纪实类照片与陌生人保持一定的距离 (可以尝试找反射场景,如水,拍摄倒影的效果往往会更好。) 拍摄女友小技巧: 1.拍摄过程中不必每次正脸出镜 2.可以尝试拍摄系列组图 3.掌握后期修图技能 调色滤镜类软件: 泼辣修图snapseed vscoam mix lightroom 标注拼图类软件: 黄油相机简拼拼立得 创意特效类软件: Union picsart ld slrwt fused circulart 人脸修饰类软件: Spring 美图秀秀 后期修图的相关步骤:
日系风格修图技巧
人物修图 最后的拍照建议:制定一周的拍摄同一类型相片的计划,多拍多看。可以从模仿优秀作品开始。 当然也要注重尝试调色和拍摄的方式,不能局限于一种题材。
施工方面常见问题汇总 1、【求助】柱砼为C60,梁板砼为C30,如何施工?答:(1)一般必须加钢板网,距柱边300—500,45 度斜设。通常固定上工人操作都不太好。方案写细点涉及收措施费。 (2)不同标号砼浇筑注意两点首先,梁柱节点区必须保证是高标号,所以退出柱边300—500,通常节点区砼 由塔吊配合浇筑;至于一般必须设钢板网是因为梁高700 左右,节点区钢筋密集, 浇筑时一定要用振动棒,设了钢板网砼也会流淌相当距离。其次,梁柱间尽量不留施工缝。 一旦监理照章办事, 出现施工缝时你就知道什么是焦头烂额。 2、【求助】基础分布钢筋? 答:如果是指中间的搭接:就是35D,(分布钢筋也一样),要不你焊接得了(我们一般都是焊接) 。 如果楼主问的是指基础十字交叉或丁字交叉的时候这种情况,则:基础分布钢筋不需要搭接。具体的情况的确应该由设计院确定,对这个情况有详细的说明,我想你们那里也应该有相应的图集吧。 3 、【求助】混凝土道路施工有什么么特别注意的地方吗? 答:( 1)注意路面交叉处主副路的位置和标高。 ( 2)一般在交叉处要设置胀缝及传力杆。 ( 3)总之,熟读图纸,按照图纸做就没问题。 4、【求助】请教大虾:做一个工程的技术员要看那些参考书?答:还不清楚你说的技术方向的岗位是指哪些岗位。如果是项目技术负责人,要求掌握的知识和技能就要相当的全面:施工、质量、安全,如果在私人老板这里干,技术负责人还要懂预算。我建议你先从技术员做起最好是跟个师傅做施工员。因为施工员面对全局碰到的事情较多,有利于锻炼和提高。当然还要加强理论学习,一些必要的专业书还是要看的,学校的教材就不用看的太多了。《建筑施工手册》虽然比较全面,但是内容相对较深。其实并不适合刚毕业参加工作的人看。先看一些岗位性较强的书如《施工员必读》 《预算员必读》之类的书。 5、【求助】钢结构求知钢构土建基础中间有挖孔,甲方提供H型钢。H型钢柱底板下有一小H 型钢插入基础孔内,底座开了两小孔灌无收缩灌浆料。 ( 1 ) H 型钢焊接拼接有无特别要求, ( 2)现是要土建将基础找平再安装钢构,还是钢构装好后再进行土建基础的二次灌浆。 答:个人认为:H型钢的焊接就是执行一般的焊接标准,没有什么特殊标准;至于与基础的连接,有先预埋和后预埋两种方式,但如果可能的话,建议采用先预埋的方式,而
手机常见故障解决方法 一、不能开机我们先看一下正常开机需要经过那些处理过程:按下开机键→开机指令送到电源IC模块→电源IC的控制脚得到信号→电源IC工作→CPU;13MHz主时钟加电→CPU 复位及完成初始化程序→CPU发出poweron信号到电源IC块→电源IC稳定输出各个单元所需的工作电压→手机开启成功然后进入入网搜索登记阶段。根据开机的处理过程,我们可以分析出下列相关部分需进行的检查和处理:.由于手机的开机键使用较频繁,此按键是否接触不良? .电源IC模块虚焊或烧坏?由于该IC的工作电流较大,故它出故障的概率比较高。.电源IC有无开机信号送到CPU? .电源IC的某一路负载有严重漏电或短路,造成开机电流很大,因而保护关机。常见的故障点是PA或PA的MOS开关管烧毁。.CPU相应的管脚虚焊?这是常见的故障点。.CPU正常工作的三个基本条件是否满足:(a)3V的工作电压;(b)13MHz 时钟;(c)复位电路。.CPU有无输出poweron信号到电源IC? .初始化软件有错误?重新写软件试试看。(注意:在检查此类故障时,可采用人为的故障单元分离法,即采用人为跨接法(可用一段短的细漆包线)对电源IC的poweron脚加一电压,若此时电源IC每一种均能输出正常的电压,则故障点一般在CPU控制部分或软件,反之故障点在电源IC部分或其负载。在检查故障时,可以按信号处理过程的方向由前向后检查,也可由后向前检查,还可以从中间某一处开始进行检查,具体方法视具体的情况和手机机型而定。) 二、能开机和关机,但在基站信号强度足够的地理区域不能登记入网该故障也是常见的故障之一。它涉及到较多的单元。当接收、发射、频率合成器、BB处理、CPU、软件有问题时,都会造成此类故障。检查与处理:.天线的接触是否良好?处理方法:用无水酒精清洗,校正天线簧片。.检查RF和IF频率合成器、RFVCO、IFVCO的工作电压?是否存在虚焊? .检查接收前端的LNA(低噪声放大器)工作点?有无虚焊? .检查RFSAW或IFSAW性能有无变差?有无虚焊?可用100P的电容跨接试试看。.检查RFIC的工作电压?有无虚焊? .检查I/Q正交MODEM的工作电压是否正常?一般的正常值为:DC1.2V左右,单端AC500mVpp左右。.检查BB处理单元工作电压?有无虚焊? .检查发射VCO、PA、MOS开关管、APC控制电路是否有问题?有无虚焊?这是典型故障点。.对于早期的机型,还需检查RF与BB之间的接插件有无虚焊? .补焊CPU、重新写软件。 三、插入SIM卡后,手机仍然检测不到SIM卡故障分析:(1)由于手机内器件的接触点面积均很小而且接触压力不能太大,再加上有些手机SIM卡座的结构设计不够合理,故容易出现这种故障。(2)目前SIM卡既有5V卡,也有3V卡,这里就涉及到一个SIM卡电源的转换问题,还需要有一个由3V升压到5V的升压电路。检查与处理:(1)SIM卡的簧片是否接触良好?若有问题,可以清洗或小心校正SIM卡簧片;(2)SIM卡的工作电压或升压电路是否正常? (3)和SIM相关的检测控制电路有无问题?特别是有无虚焊? (4)软件数据有错误或部分数据丢失,可重新再写一次软件试试看? 四、信号时好时坏故障分析:在排除了电池故障和外界环境干扰的情况下,故障原因可能是手机内部存在虚焊点(特别是对于受到碰撞、挤压、跌落的手机更是如此),也可能是软件存在问题。检查与处理:根据故障现象,可在相关的电路部位全面补焊一次并清洁(重点检查部位是天线、发射通道、接收通道、频率合成器),然后再仔细地安装手机,若手机能够正常稳定地工作半个月(指在不同的时间和地点的条件下,故障一次都没有出现),则说明故障已经排除,否则的话,故障点还存在。这种故障在家用电器的维修中称之为“软故障”,它的排除有时十分“棘手”,这需要维修者丰富的经验、细致和全面的分析。 五、工作或待机时间明显变短故障分析:出现此故障的原因会有1)电池未充足电、质量变差、容量减小;(2)PA部分有问题,发射效率降低,导致耗电增加;(3)机内存在漏电故障,特别是对于浸过水的手机更是如此。通过测量手机的工作电流、待机电流、关机
LS-DYNA初学者常见的问题 LS-DYNA在1976年由美国劳伦斯·利沃莫尔国家实验室(Lawrence Livermore National Laboratory)J.O.Hallquist博士主持开发,时间积分采用中心差分 格式,当时主要用于求解三维非弹性结构在高速碰撞、爆炸冲击下的大变形动 力响应,是北约组织武器结构设计的分析工具。LS-DYNA的源程序曾在北约的 局域网Pubic Domain公开发行,因此在广泛传播到世界各地的研究机构和大学。从理论和算法而言,LS-DYNA是目前所有的显式求解程序的鼻祖和理论基础。 1988年,J.O.Hallquist创建利沃莫尔软件技术公司(Livermore Software Technology Corporation),LS-DYNA 开始商业化进程,总体来看,到目前为止在单元技术、材料模式、接触算法以及多场耦合方面获得非常大的 进步。 以下为LS-DYNA初学者常见的问题: 一、LS-DYNA与市面上其它的前处理软件兼容性如何? 解答:由于LS-DYNA是全球使用率最高的结构分析软件,因此其它的前处理软件与LS-DYNA是完全兼容的。在此要强调的是:LS-DYNA的官方前处理程序为FEMB,因为FEMB是专门为LS-DYNA量身订作的前处理程序,有许多设定条件及架构逻辑是其它前处理软件所难望其项背的,为了避免在学习LS-DYNA的过程 及操作上产生困扰,强烈建议使用者采用原厂出品的FEMB来做为LS-DYNA的前处理工具,使用者必定更能体会LS-DYNA直觉式的设定与强大的分析能力。. 二、LS-DYNA似乎很重视「Contact Algorithm」,这是为什么? 解答:是的,LS-DYNA很早以前就已经发展「接触算法」,这是因为基础力学 所分析的对像均只考虑「力的受体」,故输入条件皆为外力量值。然而在真实 情况下,物体受力通常是因为与其它的物体发生「接触」(Contact)才受力,此时外力量值是无法预期的,应该输入的条件往往都是几何上的接触条件。因 为有完备的接触力学演算方式,LS-DYNA才得以忠实的仿真现实环境的复杂结 构行为。 三、如果要利用LS-DYNA进行MPP(平行运算)的计算,硬件配备及操作系统有 无特殊需求? 解答:不论是PC cluster、工作站及一般的PC环境,都适合执行LS-DYNA的MPP平行运算功能,一般我们还是会建议要用来执行平行运算的计算机群组, 彼此的等级宜尽量一致;操作系统方面并无特别需求,以一般的windows2000、LINUX或是UNIX皆可执行。国外已有很多厂商利用非办公时间,将办公室内 的计算机串连在一起,结合LS-DYNA来分析问题,宛如一部超级计算机,不仅 可以有效提升研发的竞争力,同时亦可弹性地运用计算机资源,一举数得。 四、FEMB能够自动产生有限元素网格吗?