“看门狗”概念及其应用
在由单片机构成的系统中,由于单片机的工作有可能会受到来自外界电磁场的干扰,造成程序的跑飞,从而陷入死循环,程序的正常运行被打断,由单片机控制的系统便无法继续工作,这样会造成整个系统陷入停滞状态,发生不可预料的后果,所以出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的芯片,俗称“看门狗”(watch dog)。
加入看门狗电路的目的是使单片机可以在无人状态下实现连续工作,其工作过程如下:看门狗芯片和单片机的一个I/O引脚相连,该I/O引脚通过单片机的程序控制,使它定时地往看门狗芯片的这个引脚上送入高电平(或低电平),这一程序语句是分散地放在单片机其他控制语句中间的,一旦单片机由于干扰造成程序跑飞后而陷入某一程序段进入死循环状态时,给看门狗引脚送电平的程序便不能被执行到,这时,看门狗电路就会由于得不到单片机送来的信号,便将它和单片机复位引脚相连的引脚上送出一个复位信号,使单片机发生复位,从而单片机将从程序存储器的起始位置重新开始执行程序,这样便实现了单片机的自动复位。
通常看门狗电路需要一个专门的看门狗芯片连接单片机来实现,不过这样会给电路设计带来复杂,STC单片机内部自带有看门狗,通过对相应特殊功能寄存器的设置就可实现看门狗的应用,STC89系列单片机内部有一个专门的看门狗定时器寄存器,Watch Dog Timer 寄存器,其相应功能见下个知识点。
看门狗定时器寄存器(WDT_CONTR)
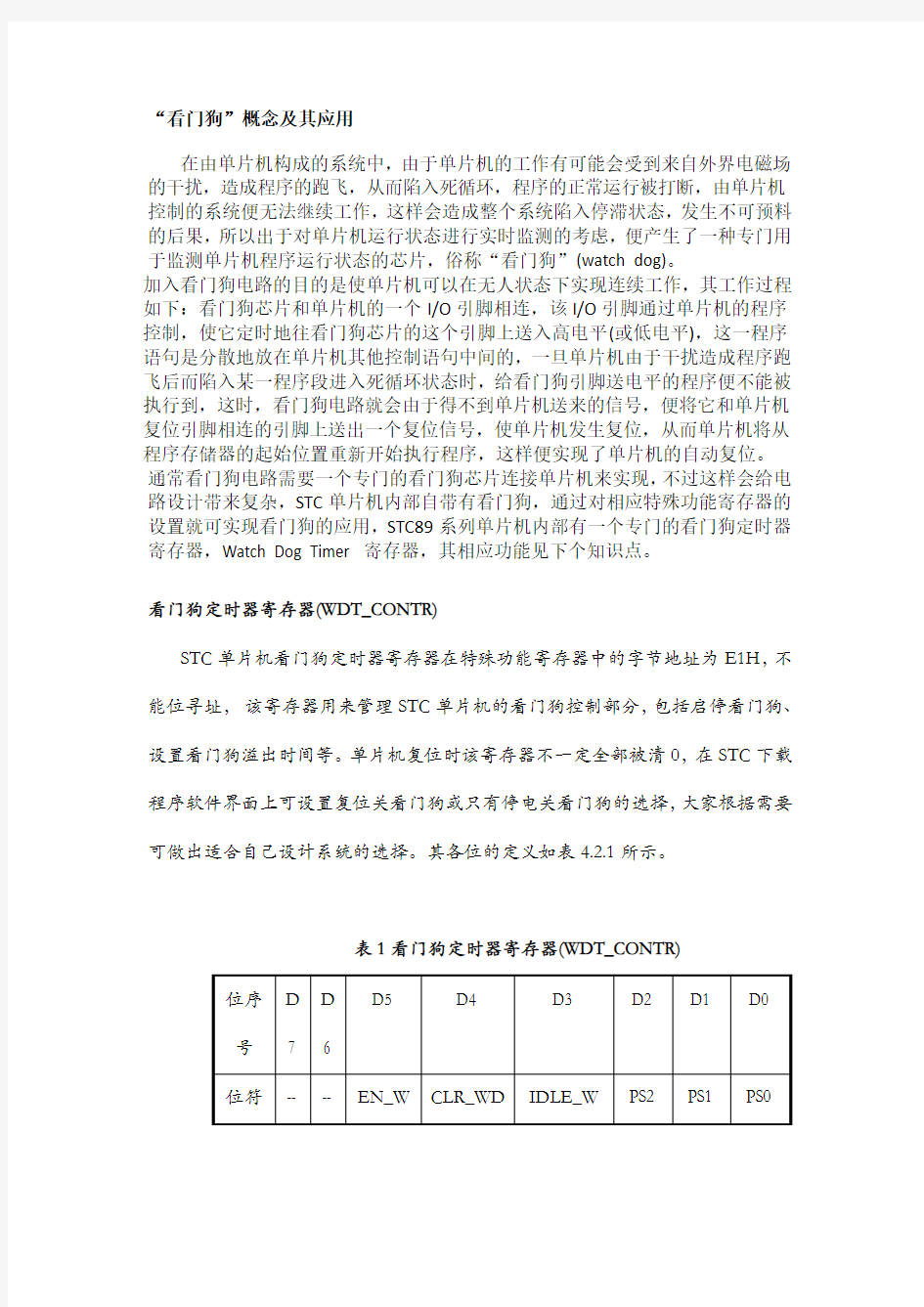
STC单片机看门狗定时器寄存器在特殊功能寄存器中的字节地址为E1H,不能位寻址,该寄存器用来管理STC单片机的看门狗控制部分,包括启停看门狗、设置看门狗溢出时间等。单片机复位时该寄存器不一定全部被清0,在STC下载程序软件界面上可设置复位关看门狗或只有停电关看门狗的选择,大家根据需要可做出适合自己设计系统的选择。其各位的定义如表4.2.1所示。
表1看门狗定时器寄存器(WDT_CONTR)
EN_WDT:看门狗允许位,当设置为“1”时,启动看门狗。
CLR_WDT :看门狗清“0”位,当设为“1”时,看门狗定时器将重新计数。硬件自动清“0”此位。
IDLE_WDT:看门狗“IDLE”模式位,当设置为“1”时,看门狗定时器在单片机的“空闲模式”计数,当清“0”该位时, 看门狗定时器在单片机的“空闲模式”时不计数。
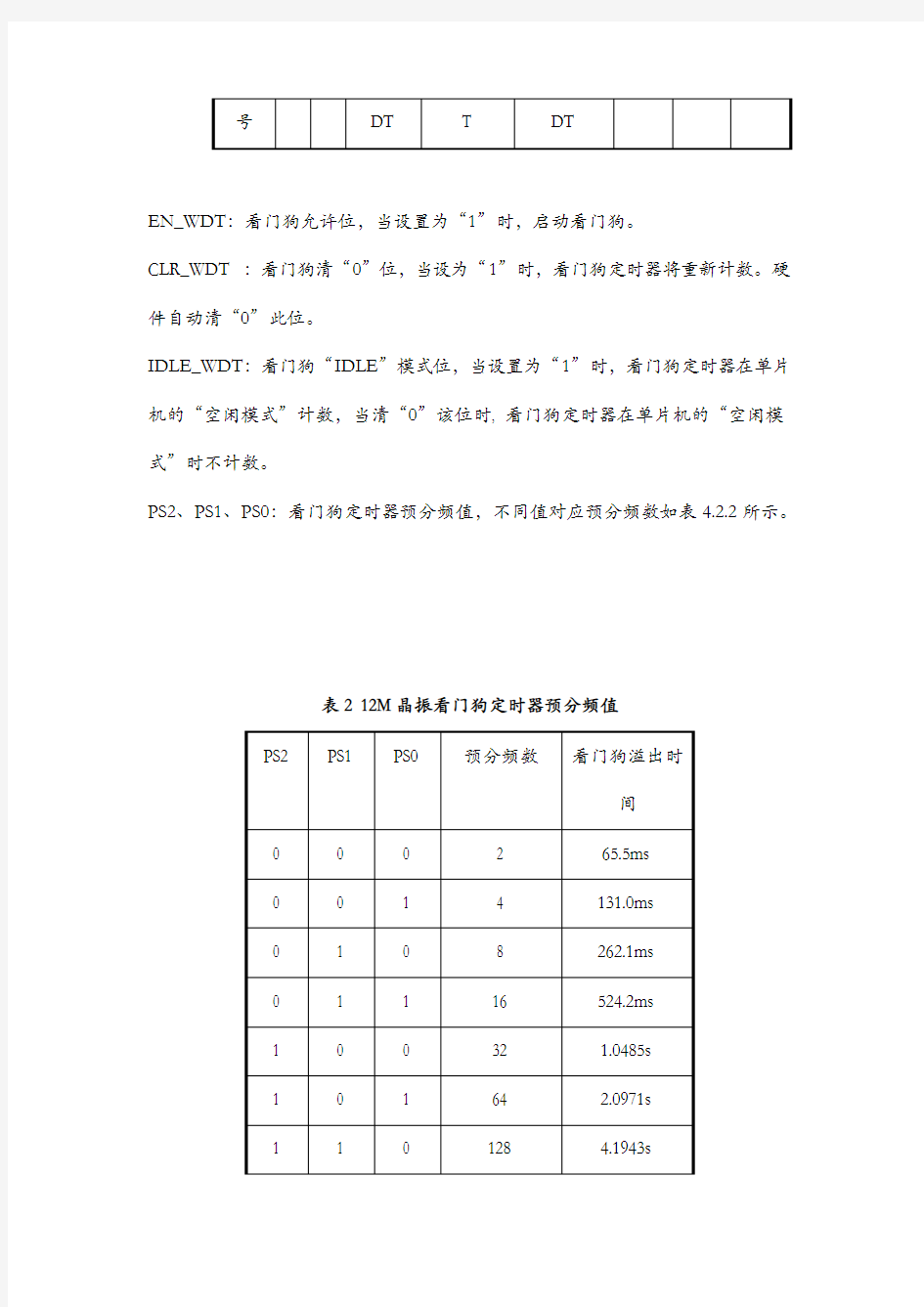
PS2、PS1、PS0:看门狗定时器预分频值,不同值对应预分频数如表4.2.2所示。
表2 12M晶振看门狗定时器预分频值
看门狗溢出时间与预分频数有直接的关系,公式如下:
看门狗溢出时间=(N×预分频数×32768)/晶振频率
上式中N表示STC单片机的时钟模式,STC单片机有两种时钟模式:单倍速,也就是12时钟模式,这种时钟模式下,STC单片机与其它公司51单片机具有相同的机器周期,即12个振荡周期为一个机器周期;另一种为双倍速,又被称为6时钟模式,在这种时钟模式下,STC单片机比其它公司的51单片机运行速度要快一倍,关于单倍速与双倍速的设置在下载程序软件界面上有设置选择,大家可自行下载测试程序运行速度。预分频数的值由PS2、PS1和PS0的组合确定,如表4.2.2所示。晶振频率即为当前系统的时钟频率。
下面我们通过两个例子来进一步讲解使用看门狗和不使用看门狗时程序运
行的区别,由于STC单片机的高抗干扰特点,至今我还未曾遇到过程序跑飞的情况,因此我们也很难人为制造出使单片机程序跑乱的情况,下面的程序演示利用看门狗的溢出时间来使程序自动复位运行。
【例】:在TX-1C实验板上实现如下描述:程序启动后设定看门狗溢出时间为2秒左右,然后点亮第一个发光二极管,稍延时一会,然后熄灭发光二极管,使程序进入等待死循环状态,并且在死循环中大约每隔1秒喂狗一次,看程序运行是否正常。
新建文件part3.4.2.c,程序代码如下:
#include
#define uchar unsigned char
#define uint unsigned int
sfr WDT_CONTR=0xe1;
sbit led1=P1^0;
void delayms(uint xms)
{
uint i,j;
for(i=xms;i>0;i--) //i=xms即延时约xms毫秒
for(j=110;j>0;j--);
}
void main()
{
WDT_CONTR=0x35;
led1=0;
delayms(500);
led1=1;
while(1)
{ delayms(1000);
WDT_CONTR=0x35;
}
}
分析:
(1)“sfr WDT_CONTR=0xe1;”定义STC单片机中新加入的看门狗寄存器,因为reg52.h头文件中没有对该寄存器的定义,以后要定义其它新的寄存器时方法相同,当然也可以写在reg52.h头文件中。
(2)程序开始后,点亮发光二极管后延时约500ms后再熄灭,这里延时不可过长,若两次喂狗之间程序运行的总时间超过看门狗的溢出时间,看门狗将复位单片机,大家可调节这个延时时间看实际演示效果。
(3)喂狗时使用和设定看门狗寄存器同样的语句,只要看门狗寄存器中的CLR_WDT位被置1,看门狗定时器将重新计数,CLR_WDT位被置1后,由硬件自动将其清零。
(4)演示结果表现为发光二极管点亮后,马上熄灭,再不会点亮,这说明程序没有被复位,始终停止在while(1)循环中,看门狗处于被正常喂狗的情况下。
【例】只需把while(1)循环中的“WDT_CONTR=0x35;”这句删掉,演示结果为小灯不停的闪烁,因为有了看门狗的作用,当看门狗定时器溢出时,使单片机复位从头重新执行程序,所以小灯闪烁。
在应用看门狗时,需要在整个大程序的不同位置喂狗,每两次喂狗之间的时间间隔一定不能小于看门狗定时器的溢出时间,否则程序将会不停的复位。
一、摘要 本文给出了一个简单51单片机开发板的电路设计,完成了其原理图的绘制和PCB图的制作。着重介绍使用protel99SE画出的电路设计原理图,接着是对电路各个模块功能的分析,然后是电路所用主要芯片和其他重要元件的功能介绍以及内部封装和引脚分布,最后介绍用protel99SE画出的PCB板。此开发板具有串口通信、液晶显示、流水灯、扩展、RTC 时钟、复位、外部中断、外部存储、A/D D/A转换、报警、继电器控制等开发功能。 关键字:51单片机开发板 protel99 PCB 二、实验所用元器件及其介绍 、清单
SW-SPDT1自制封装1KΩ电阻150805 2KΩ电阻50805 三极管90152TO-18 HRS4-S-DC5V继电器1自制封装跳线6 LED110805 9针串口1DB9/M 极性电容10uF1.6 104电容40805 30pF电容50805 电池Battery1自制封装响铃1 n口排针4SIP n 晶振12MHZ1XTAL1 外接晶振1XTAL1 主要芯片引脚图和实物图 STC89C52
图(1) STC89C52引脚图 图(2) STC89C52实物图 8255
图 8255引脚图 DS1302 图(1) DS1302引脚图 表 DS1302引脚描述 引脚号符号描述引脚号符号描述 1VCC2备用电源5复位 2X1晶振引脚6 I/O数据输入/输
24C08 图(1) 24C08引脚图 表 24C08功能表
图(2) 24C08 实物图 MAX232 图(1)MAX232引脚图 表各引脚功能及推荐工作条件
C51单片机和电脑串口通信电路图与源码 51单片机有一个全双工的串行通讯口,所以单片机和电脑之间可以方便地进行串口通讯。进行串行通讯时要满足一定的条件,比如电脑的串口是RS232电平的,而单片机的串口是TTL电平的,两者之间必须有一个电平转换电路,我们采用了专用芯片MAX232进行转换,虽然也可以用几个三极管进行模拟转换,但是还是用专用芯片更简单可靠。我们采用了三线制连接串口,也就是说和电脑的9针串口只连接其中的3根线:第5脚的GND、第2脚的RXD、第3脚的TXD。这是最简单的连接方法,但是对我们来说已经足够使用了,电路如下图所示,MAX232的第10脚和单片机的11脚连接,第9脚和单片机的10脚连接,第15脚和单片机的20脚连接。 串口通讯的硬件电路如上图所示 在制作电路前我们先来看看要用的MAX232,这里我们不去具体讨论它,只要知道它是TTL和RS232电平相互转换的芯片和基本的引脚接线功能就行了。通常我会用两个小功率晶体管加少量的电路去替换MAX232,可以省一点,效果也不错,下图就是MAX232的基本接线图。
按图7-3加上MAX232就可以了。这大热天的拿烙铁焊焊,还真的是热气迫人来呀:P串口座用DB9的母头,这样就可以用买来的PC串口延长线进行和电脑相连接,也可以直接接到电脑com口上。
为了能够在电脑端看到单片机发出的数据,我们必须借助一个WINDOWS软件进行观察,这里我们利用一个免费的电脑串口调试软件。本串口软件在本网站https://www.doczj.com/doc/6510413162.html,可以找到 软件界面如上图,我们先要设置一下串口通讯的参数,将波特率调整为4800,勾选十六进制显示。串口选择为COM1,当然将网站提供的51单片机实验板的串口也要和电脑的COM1连接,将烧写有以下程序的单片机插入单片机实验板的万能插座中,并接通51单片机实验板的电源。
TMS320F2812 Watchdog范例程序 FILE: Example_28xWatchdog.c // // TITLE: DSP28 Watchdog interrupt test program. // // ASSUMPTIONS: // // This program requires the DSP28 header files. To compile the // program as is, it should reside in the DSP28/examples/watchdog // sub-directory. // // As supplied, this project is configured for "boot to H0" operation. // // DESCRIPTION: // This program exercises the watchdog on the F2812/F2810 parts. // // First the watchdog is connected to the WAKEINT interrupt of the // PIE block. The code is then put into an infinite loop. // // The user can select to feed the watchdog key register or not // by commenting one line of code in the infinite loop. // // If the watchdog key register is fed by the KickDog function // then the WAKEINT interrupt is not taken. If the key register // is not fed by the KickDog function then WAKEINT will be taken. // // Watch Variables: // LoopCount for the number of times through the infinite loop // WakeCount for the number of times through WAKEINT // //########################################################################### // // Ver | dd mmm yyyy | Who | Description of changes // =====|=============|======|=============================================== // 0.57| 29 May 2002 | L.H. | Initial Release //########################################################################### // Step 0. Include required header files // DSP28_Device.h: device specific definitions #include statements for // all of the peripheral .h definition files. // DSP28_Example.h is specific for the given example. #include "DSP28_Device.h"
设计题目:STC89C51单片机学习电路板设计 题目性质:一般设计 指导教师:[04054]吕青 毕业设计(论文)要求及原始数据(资料) 1.课题简介: STC89C51系列单片机具有功能强、价格低的特点,是51系列单片机最好的替代机型。本题目就是为入门该系列单片机设计一个学习电路板,满足学习该型号单片机的需求。 该学习电路板用于C8051F330单片机的学习。该板具有RS232接口、数码管、发光二极管显示、键盘、模拟量输入、蜂鸣器和具有扩展实验接口。设计原则是简单实用。 2.技术参数 1)使用美国Silabs公司STC89C51单片机 2)具有1个RS232接口 3)具有8个数码管(HC595驱动) 4)具有4个按钮 5)具有1路模拟量电压输入 6)ISP下载接口与下载电缆电路 7)具有蜂鸣器与驱动电路 8)供电:AC220V 9)具有8个LED 10)具有功率接口(具有AC220V,1A驱动能力) 11)具有D/A输出 毕业设计(论文)主要工作内容 主要内容 1)了解市场上的各种单片机学习板,制定设计方案。 2)学习STC89C51单片机的数据手册 3)学习STC89C51 单片机的相关参考书 4)学习PROTEL软件 5)学习板原理图设计 6)电路板(PCB)设计 7)调试电路板 8)熟悉STC89C51 单片机的C编译器与编程软件 9)编写C语言的电路板测试程序 10)编写学习使用说明 学生应交出的设计文件(论文) 1论文。要求内容准确,叙述清晰流畅,图文详尽,正文不少于60页,不得有错别字,并符合学校对论文的各项要求。主要内容包括: 1)学习板总体设计概述; 2)学习板结构设计说明(包括总体结构总框图); 3)学习板原理图设计说明(包括硬件电路原理图,用Protel98se画); 4)学习板硬件电路板设计说明(包括PCB板图); 5)学习板软件程序设计说明(包括程序流程图和源程序清单及注释); 6)学习板主要示例子程序设计说明(包括程序流程图和源程序清单及注释); 7)设计难点和遗留问题(包括设计中遇到的难题和解决方法,以及尚未解决的问题和解决的思路);
单片机:交通灯课程设计(一) 目录 摘要--------------------------------------------------------- 1 1.概述 -------------------------------------------------------- 2 2.硬件设计----------------------------------------------------- 3 2.1单片机及其外围--------------------------------------------3 2.1.1单片机的选择-----------------------------------------3 2.1.2单片机的特点及其应用范围----------------------------- 3 2.1.3存储器的扩展----------------------------------------- 4 2.1.4内存的扩展------------------------------------------- 6 2.1.5MCS-52的I/O接口扩展--------------------------------- 8 2.2电路部分--------------------------------------------------11 2.2.1元器件选用-------------------------------------------11 2.2.2电路完成功能-----------------------------------------13 3.软件设计------------------------------------------------------15 3.1软件概述-------------------------------------------------15 3.2汇编语言指令说明-----------------------------------------16 3.3定时/计数器的原理----------------------------------------16 3.3.1定时/计数器的概述-----------------------------------16 3.3.2 8255A片选及各端口地址-------------------------------18 3.3.3信号控制码------------------------------------------18 3.3.4工作方式寄存器--------------------------------------19 3.3.5定时/计数器初值及定时器T0的工作方式----------------20
看门狗分硬件看门狗和软件看门狗。硬件看门狗是利用一个定时器电路,其定时输出连接到电路的复位端,程序在一定时间范围内对定时器清零(俗称“喂狗”),因此程序正常工作时,定时器总不能溢出,也就不能产生复位信号。如果程序出现故障,不在定时周期内复位看门狗,就使得看门狗定时器溢出产生复位信号并重启系统。软件看门狗原理上一样,只是将硬件电路上的定时器用处理器的内部定时器代替,这样可以简化硬件电路设计,但在可靠性方面不如硬件定时器,比如系统内部定时器自身发生故障就无法检测到。当然也有通过双定时器相互监视,这不仅加大系统开销,也不能解决全部问题,比如中断系统故障导致定时器中断失效。 看门狗本身不是用来解决系统出现的问题,在调试过程中发现的故障应该要查改设计本身的错误。加入看门狗目的是对一些程序潜在错误和恶劣环境干扰等因素导致系统死机而在无人干预情况下自动恢复系统正常工作状态。看门狗也不能完全避免故障造成的损失,毕竟从发现故障到系统复位恢复正常这段时间内怠工。同时一些系统也需要复位前保护现场数据,重启后恢复现场数据,这可能也需要一笔软硬件的开销。 图1:(a) 多任务系统看门狗示意图;(b) 相应的看门狗复位逻辑图。 在单任务系统中看门狗工作原理如上所述,容易实现。在多任务系统中情况稍为复杂。假如每个任务都像单任务系统那么做,如图1(a)所示,只要有一个任务正常工作并定期“喂狗”,看门狗定时器就不会溢出。除非所有的任务都故障,才能使得看门狗定时器溢出而复位,如图1(b)。 而往往我们需要的是只要有一个任务故障,系统就要求复位。或者选择几个关键的任务接受监视,只要一个任务出问题系统就要求复位,如图2(a)所示,相应的看门狗复位逻辑如图2(b)所示。 在多任务系统中通过创建一个监视任务TaskMonitor,它的优先级高于被监视的任务群Task1、Task2...Taskn。TaskMonitor在Task1~Taskn正常工作情况下,一定时间内对硬件看门狗定时器清零。如果被监视任务群有一个Task_x出现故障,TaskMonitor就不对看门狗定时器清零,也就达到被监视任务出现故障时系统自动重启的目的。另外任务TaskMonitor自身出故障时,也不能及时对看门狗定时器清零,看门狗也能自动复位重启。
看门狗电路设计 在工业现场运行的单片机应用系统,由于坏境恶劣,常有强磁场、电源尖峰、电火花等外界干扰,这些干扰可能造成仪表中单片机的程序运行出现“跑飞”现象,引起程序混乱,输出或显示不正确,甚至“死机”。系统无法继续正常的运行,处在一种瘫痪状态,它的硬件电路并没有损坏,只是内部程序运行出现了错误,这时,即使干扰消失,系统也不会恢复正常,这就需要采取一些措施来保障系统失控后能自动恢复正常,“程序运行几天来视系统”(Watchdog看门狗)就是常用的一种抗干扰措施,用以保证系统因干扰失控后能自动复位。为了提高仪表可靠性及抗干扰能力,通常在智能仪表中采用“看门狗”技术。 看门狗电路它实质上是一个可由CPU复位的定时器,它的定时时间是固定不变的,一旦定时时间到,电路就产生复位信号或中断信号。当程序正常运行时,在小于定时时间隔内,单片机输出一信号刷新定时器,定时器处于不断的重新定时过程,因此看门狗电路就不会产生复位信号或中断信号,反之,当程序因出现干扰而“跑飞”时,单片机不能刷新定时器,产生复位信号或产生中断信号使单片机复位或中断,在中断程序中使其返回到起始程序,恢复正常。 它的工作原理如同图3-4所示的两个计时周期不同的定时器T1和T2是两个时钟源相同的定时器,设T1=1.0s,T2=1.1s,而用T1定时器的溢出脉冲P1同时对T1和T2定时器清零,只要T1定时器工作正常,则定时器T2永远不可能计时溢出。当T1定时器不在计时,定时器T2则会计时溢出,并产生溢出脉冲P2。一旦产生溢出脉冲P2,则表明T1出了故障。这里的T2即是看门狗。利用溢出脉冲P2并进行巧妙的程序设计,可以检测系统的出错,而后使“飞掉”的程序重新恢复运行。 图3-4 看门狗工作原理示意图 看门狗电路的应用,使单片机可以在无人关态下实现连续工作。看门狗芯片和单片机的一个I/O引脚相连,该I/O引脚通过程序控制它定时地往看门狗的这
AD0809在51单片机中的应用 我们在做一个单片机系统时,常常会遇到这样那样的数据采集,在这些被采集的数据中,大部分可以通过我们的I/O口扩展接口电路直接得到,由于51单片机大部分不带AD转换器,所以模拟量的采集就必须靠A/D或V/F实现。下现我们就来了解一下AD0809与51单片机的接口及其程序设计。 1、AD0809的逻辑结构 ADC0809是8位逐次逼近型A/D转换器。它由一个8路模拟开关、一个地址锁存译码器、一个A/D转换器和一个三态输出锁存器组成(见图1)。多路开关可选通8个模拟通道,允许8路模拟量分时输入,共用A/D转换器进行转换。三态输出锁器用于锁存A/D转换完的数字量,当OE端为高电平时,才可以从三态输出锁存器取走转换完的数据。
2、AD0809的工作原理 IN0-IN7:8条模拟量输入通道 ADC0809对输入模拟量要求:信号单极性,电压围是0-5V,若信号太小,必须进行放大;输入的模拟量在转换过程中应该保持不变,如若模拟量变化太快,则需在输入前增加采样保持电路。 地址输入和控制线:4条 ALE为地址锁存允许输入线,高电平有效。当ALE线为高电平时,地址锁存与译码器将A,B,C三条地址线的地址信号进行锁存,经译码后被选中的通道
的模拟量进转换器进行转换。A,B和C为地址输入线,用于选通IN0-IN7上的一路模拟量输入。通道选择表如下表所示。 C B A 选择的通道 0 0 0 IN0 0 0 1 IN1 0 1 0 IN2 0 1 1 IN3 1 0 0 IN4 1 0 1 IN5 1 1 0 IN6 1 1 1 IN7 数字量输出及控制线:11条 ST为转换启动信号。当ST上跳沿时,所有部寄存器清零;下跳沿时,开始进行A/D转换;在转换期间,ST应保持低电平。EOC为转换结束信号。当EOC为高电平时,表明转换结束;否则,表明正在进行A/D转换。OE为输出允许信号,用于控制三条输出锁存器向单片机输出转换得到的数据。OE=1,输出转换得到的数据;OE=0,输出数据线呈高阻状态。D7-D0为数字量输出线。 CLK为时钟输入信号线。因ADC0809的部没有时钟电路,所需时钟信号必须由外界提供,通常使用频率为500KHZ, VREF(+),VREF(-)为参考电压输入。
STM32窗口看门狗程序 窗口看门狗(WWDG)通常被用来监测由外部干扰或不可预见的逻辑条件造成的应用程序背离正常的运行序列而产生的软件故障。除非递减计数器的值在T6位(WWDG->;CR的第六位)变成0前被刷新,看门狗电路在达到预置的时间周期时,会产生一个MCU复位。在递减计数器达到窗口配置寄存器(WWDG->;CFR)数值之前,如果7位的递减计数器数值(在控制寄存器中)被刷新,那么也将产生一个MCU复位。这表明递减计数器需要在一个有限的时间窗口中被刷新。
图 3.6.1.1中,T[6:0]就是WWDG_CR的低七位,W[6:0]即是WWDG->;CFR的低七位。T[6:0]就是窗口看门狗的计数器,而W[6:0]则是窗口看门狗的上窗口,下窗口值是固定的(0X40)。当窗口看门狗的计数器在上窗口值之外被刷新,或者低于下窗口值都会产生复位。 上窗口值(W[6:0])是由用户自己设定的,根据实际要求来设计窗口值,但是一定要确保窗口值大于0X40,否则窗口就不存在了。 窗口看门狗的超时公式如下: Twwdg=(4096×2^WDGTB×(T[5:0]+1)) /Fpclk1; 其中: Twwdg:WWDG超时时间(单位为ms) Fpclk1:APB1的时钟频率(单位为Khz) WDGTB:WWDG的预分频系数 T[5:0]:窗口看门狗的计数器低6位 窗口看门狗寄存器介绍:
如何使用窗口看门狗: 1)使能WWDG时钟 2)设置WWDG_CFR和WWDG_CR两个寄存器 在时钟使能完后,我们设置WWDG的CFR和CR两个寄存器,对WWDG进行配置。包括使能窗口看门狗、开启中断、设置计数器的初始值、设置窗口值并设置分频数WDGTB 3)开启WWDG中断并分组 4)编写中断服务函数 软件例程: //---------------------------wdg.c----------------------- #include "wdg.h" #include "led.h" u8 wwdg_cnt=0x7f; //窗口看门狗计数器初值 void wwdg_init(u8 tr,u8 wr,u8 fprer) { RCC->;APB1ENR|=1;CFR|=fprer;CFR|=1;CFR&=0xff80; //窗口值清零 WWDG->;CFR|=wr; //设定窗口值 WWDG->;CR|=(wwdg_cnt|1;CR|=(cnt&0x7f); //喂狗值 } void WWDG_IRQHandler(void)
看门狗电路。在单片机中,为了能使得程序能够正常的运行。设定的及时根据程序所返回的值检测程序运行情况的定时电路。 在主程序中设定一定的值,把这个值在看门狗定时电路数值益处之前定时赋给看门狗赋给定时电路,让看门狗定时器复位。主程序的赋值周期要小于看门狗定时电路的运行周期。 看门狗 百科名片 单片机"看门狗" 在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造成程序的跑飞,而陷入死循环,程序的正常运行被打断,由单片机控制的系统无法继续工作,会造成整个系统的陷入停滞状态,发生不可预料的后果,所以出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的芯片,俗称"看门狗"(watchdog) 目录[隐藏] 应用 基本原理 看门狗使用注意 看门狗运用 设计思路 [编辑本段]应用 看门狗电路的应用,使单片机可以在无人状态下实现连续工作,其工作原理是:看门狗芯片和单片机的一个I/O引脚相连,该I/O引脚通过程序控制它定时地往看门狗的这个引脚上送入高电平(或低电平),这一程序语句是分散地放在单片机其他控制语句中间的,一旦单片机由于干扰造成程序跑飞后而陷入某一程序段进入死循环状态时,写看门狗引脚的程序便不能被执行,这个时候,看门狗电路就会由于得不到单片机送来的信号,便在它和单片机复位引脚相连的引脚上送出一个复位信号,使单片机发生复位,
即程序从程序存储器的起始位置开始执行,这样便实现了单片机的自动复位。 [编辑本段]基本原理 看门狗,又叫watchdog timer,是一个定时器电路, 一般有一个输入,叫喂狗(kicking the dog or service the dog),一个输出到MCU的RST端,MCU正常工作的时候,每隔一端时间输出一个信号到喂狗端,给WDT 清零,如果超过规定的时间不喂狗,(一般在程序跑飞时),WDT 定时超过,就会给出一个复位信号到MCU,使MCU复位. 防止MCU死机. 看门狗的作用就是防止程序发生死循环,或者说程序跑飞。工作原理:在系统运行以后也就启动了看门狗的计数器,看门狗就开始自动计数,如果到了一定的时间还不去清看门狗,那么看门狗计数器就会溢出从而引起看门狗中断,造成系统复位。所以在使用有看门狗的芯片时要注意清看门狗。硬件看门狗是利用了一个定时器,来监控主程序的运行,也就是说在主程序的运行过程中,我们要在定时时间到之前对定时器进行复位如果出现死循环,或者说PC指针不能回来。那么定时时间到后就会使单片机复位。常用的WDT芯片如MAX813 ,5045, IMP 813等,价格4~10元不等. 软件看门狗技术的原理和这差不多,只不过是用软件的方法实现,我们还是以51系列来讲,我们知道在51单片机中有两个定时器,我们就可以用这两个定时器来对主程序的运行进行监控。我们可以对T0设定一定的定时时间,当产生定时中断的时候对一个变量进行赋值,而这个变量在主程序运行的开始已经有了一个初值,在这里我们要设定的定时值要小于主程序的运行时间,这样在主程序的尾部对变量的值进行判断,如果值发生了预期的变化,就说明T0中断正常,如果没有发生变化则使程序复位。对于T1我们用来监控主程序的运行,我们给T1设定一定的定时时间,在主程序中对其进行复位,如果不能在一定的时间里对其进行复位,T1 的定时中断就会使单片机复位。在这里T1的定时时间要设的大于主程序的运行时间,给主程序留有一定的的裕量。而T1的中断正常与否我们再由T0定时中断子程序来监视。这样就够成了一个循环,T0监视T1,T1监视主程序,主程序又来监视T0,从而保证系统的稳定运行。51 系列有专门的看门狗定时器,对系统频率进行分频计数,定时器溢出时,将引起复位.看门狗可设定溢出率,也可单独用来作为定时器使用。凌阳61的看门狗比较单一,一个是时间单一,第二是功能在实际的使用中只需在循环当中加入清狗的指令就OK了。AVR系列中,avr-libc 提供三个API 支持对器件内部Watchdog 的操作,它们分别是:wdt_reset() // Watchdog 复位wdt_enable(timeout) // Watchdog 使能wdt_disable() // Watchdog 禁止C8051Fxxx单片机内部也有一个21位的使用系统时钟的定时器,该定时器检测对其控制寄存器的两次特定写操作的时间间隔。如果这个时间间隔超过了编程的极限值,将产生一个WDT复位。-------------------------------------------------------------------------------- [编辑本段]看门狗使用注意
用CD4060制作看门狗报警电路 看门狗定时器(WDT,Watch Dog Timer)是单片机的一个组成部分,它实际上是一个计数器,一般给看门狗一个大数,程序开始运行后看门狗开始倒计数。如果程序运行正常,过一段时间CPU应发出指令让看门狗,重新开始倒计数。如果看门狗减到0就认为程序没有正常工作,强制整个系统复位。 原理图: CD4060芯片特性 1) 电压范围宽,应该可以工作在3V~15V,输入阻抗高,驱动能力差外,跟74系列的功能基本没有区别; 2) 输入时,1/2工作电压以下为0,1/2工作电压以上为1; 3) 输出时,1=工作电压;0=0V; 4) 驱动能力奇差,在设计时最多只能带1个TTL负载; 5) 如果加上拉电阻的话,至少要100K电阻; 6) 唯一现在使用的可能就是计数器,CD4060的计数器可以到14级二进制串行计数。 以AT89C51为例: 看门狗电路由14位二进制计数器CD4060和三极管VT1、VT2等组成。
Vout接单片机AT89C51的引脚输出口P1.7,由单片机的CPU向看门狗电路发送喂狗信号——正脉冲,在两个正脉冲间隔内,P1.7保持为低电平(此功能要结合软件才能实现,相应的软件设计在下面介绍)。我们知道,单片机AT89C51的I/O口带灌电流负载的能力比较大,每个引脚低电平时的吸入电流为20 mA,带拉电流负载的能力却很小,实测情况是,每个引脚高电平时的输出电流仅25μA,现在P1.7口被设计成带拉电流负载的方式,为了提高P1.7口带拉电流负载的能力,所以,电路中设置了上拉电阻R3。 14位二进制计数器CD4060的计数脉冲由其内部振荡器和外接阻容元件R1、R2、C1组成的电路产生,振荡周期为 T0SC=2.2×R1×C1=0.22 ms 振荡器产生的计数脉冲(矩形波)可以直接引出,同时还可以从CD4060的10个输出端Q4~Q10和Q12~Q14得到不同分频系数的方波输出,各方波输出信号的周期如表1所示。这样,如果CD4060得不到CPU通过P1.7口发送来的喂狗信号——正脉冲,则CD4060的输出端Q14在1.8S内将产生一个完整周期的方波信号,而且低电平在前,高电平在后,其高电平经三极管VT1、VT2处理后形成单片机AT89C51的复位信号,使单片机AT89C51复位。由此可见,单片机AT89C51正常工作时,只要在0.9S内从P1.7口送出一个正脉冲,便可及时清零看门狗,输出端Q14就不会产生定时溢出信号,从而使看门狗电路对单片机系统不起作用。并且,从CD4060的10个输出端Q4~Q10和Q12~Q14可以得到不同周期的方波信号,经三极管VT1、VT2处理后形成单片机系统的复位信号,可以适应不同用户应用程序,从而该硬件看门狗电路可以适应不同的单片机应用系统。 对MCS-51系列的单片机而言,它所需要的复位信号是高电平宽度大于2个机器周期的正脉冲,例如,单片机的时钟脉冲频率为12 MHz时,则所需要的复位信号高电平宽度为2μs以上就可以了,而由上面的分析可知,CD4060的Q14输出的是高电平宽度为0.9 s的方波,如果让它直接作为单片机的复位信号,则单片机的复位时间势必在0.9 s以上,这样尽管可以使程序跑飞的单片机复位,但是显然没有做到尽快地引导跑飞的程序到正确的轨道来,如果这样做的话,对于某些单片机应用系统而言可能带来非常严重的后果。图1中的三极管VT1、VT2及其周围阻容元件构成波形转换电路,把较宽的正脉冲变换为较窄的正脉冲,从而较好地解决了上述的问题。三极管VT1、VT2构成的2级直接耦合放大器作为缓冲器使用,它是CD4060的输出端Q14的灌电流负载,C2、R8是微分电路。 经分析后不难看出,电路中的R7、R8、C2还具有单片机上电复位的功能。 2 上电复位与看门狗信号复位的不同处理过程 由于程序跑飞很可能会造成一些随机破坏事件,对某些系统而言,希望尽可能从断点处恢复运行,因此,有必要妥善解决跑飞的程序回复后的处理。 单片机应用系统上电时,上电复位电路会使得单片机处于复位状态,这一般称为冷启动,这种情况下,单片机处于复位状态表现为: (1) 程序计数器PC的值为0000H。 (2) I/O口(P0、P1、P2、P3(1))为FFH状态,即准双向I/O口的输入状态。 (3) 堆栈指示器SP=07H,即堆栈底为片内RAM的07H单元。 (4) 除上述状态外,所有特殊功能寄存器SFR的有效位均为0。 (5) 上电复位时,由于是重新供电,RAM在断电时数据丢失,上电复位后为随机数。
51单片机的若干电路原理图 单片机 2007-10-23 20:36:31 阅读198 评论0 字号:大中小订阅 利用下面这些原理图,就可以自己动手做个简单的实验板啦~~~~ 1 外接电源供电电路及电源指示灯 在单片机实训板上为系统设计了一个外接电源供电电路,这个电源电路具备两种电源供电方式:一种是直接采用PC的USB接口5V直流电源给实训板供电,然后在电源电路中加入一个500mA电流限制的自恢复保险丝给PC的USB电源提供了保护的作用;另一种是采用小型直流稳压电源供电,输出的9V直流电源加入到电源电路中,通过LM7805稳压芯片的降压作用,给实训板提供工作所需的5V电源。 如图2.4所示为采用LM7805稳压芯片进行降压供电的电源电路。 图2.4 外接电源供电电路 同时,为了显示外接电源给实训板提供了电源,在系统中增加了电源指示灯电路,如图2.5。 发光二极管工作在正常工作状态时,流过LED的电流只需要5~10mA左右就行,在电路中采用白发红高亮LED,所以可以取5mA左右
的电流值,通过计算,可知:连接LED的限流电阻的阻值可以采用680Ω。 图2.5 电源指示灯电路 2 系统复位电路 复位是单片机的初始化操作,只要给RESET引脚加上2个机器周期以上的高电平信号,即可使单片机复位。除了进入系统的正常初始化之外,当程序运行出错或是操作错误使系统处于死锁状态时,为了摆脱死锁状态,也需要按复位键重新复位。 在系统中,为了实现上述的两项功能,采用常用的按键电平复位电路,如图2.6所示。 2.6 按键电平复位电路 从途中可以看出,当系统得到工作电压的时候,复位电路工作在上电自动复位状态,通过外部复位电路的电容充电来实现,只要Vcc
C51单片机看门狗电路及 程序设计案 院系:信息工程学院 年级:2010级 电子一班禹豪 电子一班训虎 电子二班邓启新 一、引言 在由单片机构成的微型计算机系统中,程序的正常运行常常会因为来自外界的电磁场干扰等原因而被打断,从而造成程序的跑飞,而陷入死循环。由此导致单片机控制的系统无法继续工作,造成整个系统的陷入停滞状态,发生不可预料的后果,所以出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的芯片或程序,俗称"看门狗"(watchdog) (1)看门狗电路基本原理 看门狗电路的应用,使单片机可以在无人状态下实现连续工作,其工作原理是:看门狗芯片和单片机的一个I/O引脚相连**,该I/O引脚通过程序控制它定时地往看门狗的这个引脚上送入高电平(或低电平),这一程序语句是分散地放在单片机其他控制语句中间的,一旦单片机由于干扰造成程序跑飞后而陷入某一程序段进入死循环状态时,写看门狗引脚的程序便不能被执行,这个时候,看门狗电路就会由于得不到单片机送来的信号,便在它和单片机复位引脚相连的引脚上送出一个复位信号,使单片机发生复位,即程序从程序存储器的起始位置开始执行,这样便实现了单片机的自动复位。 *此处设计原理实际上为下文中硬件看门狗设计思路。
(2)看门狗电路一般设计式 “看门狗”电路一般分为硬件看门狗与软件看门狗两种设计式。 硬件看门狗是利用了一个定时器,来监控主程序的运行,也就是说在主程序的运行过程中,我们要在定时时间到之前对定时器进行复位。如果出现死循环,或者说PC指针不能回来,那么定时时间到后就会使单片机复位。常用的WDT芯片如MAX813,5045,IMP 813等,价格4~10元不等. 软件看门狗技术的原理和硬件看门狗类似,只不过是用软件的法实现(即利用单片机部定时器资源,通过编程模拟硬件看门狗工作式),以51系列为例:因在51单片机中有两个定时器,在利用部定时器资源来对主程序的运行进行监控时。可以对T1(或T0)设定一定的定时时间(设定的定时值要小于主程序的运行时间),当产生定时中断的时候对一个变量进行赋值(此变量在主程序运行的开始已有一个初值)。当主程序运行至最后时对此变量的值进行判断,如果值发生了预期的变化,就说明T0中断正常,如果没有发生变化则使程序复位。 考虑到设计要求,本设计采用软件看门狗设计思路。 二、看门狗电路整体设计思路 根据设计要求,本设计利用C51单片机部自带的定时器1进行编程,并配合少量电路实现“看门狗“电路功能。整个设计分为软件部分与硬件部分,如下: (1)软件部分设计原理: 软件设计分为三部分:“看门狗“定时器设置程序、溢出中断服务程序和喂狗代码。 1.1设计思路: 1)在主程序开头,“看门狗“定时器设置程序设置定时器1计时50ms。 2)当定时达50ms时,定时器1产生溢出中断,溢出中断服务程序开始工作,将看门狗标志num加1。当num的值等于100时,说明看门狗定时器已经计时5s,此时,单片机I/O端口P1.0输出高电平,对程序进行复位。 3)在此过程中,喂狗代码将被穿插于程序中循环体末尾。当循环体结束时,喂狗代码执行,关闭定时器1、清空num并重新初始化定时器设置。若循环体进入死循环,喂狗代码无法执行,num将一直累加至100,此时程序复位。 注:喂狗代码放置位置可根据num预计数值进行调整:当num门限值较小,即看门狗计数时间较短时,喂狗代码可放于程序中各循环体之后或均匀分布于整个主程序中。当num门限值较大,即看门狗计数时间较长时,喂狗代码可放于程序主循环体末尾。但是需注意看门狗计数时间必须长于正常工作时间,以免非正常复位。 1.2软件设计流程图:
XXXXXXX 毕业设计 题目GPRS无限通讯数据系统的设计与应用姓名xxx 学号xxx 专业班级xxx 分院xxx
指导教师xxx xxxx年xxx月xxx日
目录 摘要............................................... 错误!未定义书签。ABSTRACT........................................................... I I 第一章概述 (1) §1.1系统背景 (1) §1.2 系统概述 (2) 第二章方案论证 (3) §2.1字模数据的存储 (3) §2.2 通信电路 (3) 第三章液晶显示模块简介 (4) §3.1 显示控制器 (5) §3.2 列驱动方式 (10) §3.3 行驱动方式 (11) 第四章硬件设计 (13) §4.1硬件电路设计要求 (13) §4.2 总体电路设计构架 (13) §4.3 单片机与液晶显示模块接口 (13) §4.4 单片机与计算机的通信接口 (14) §4.5 电源电路 (15) 第五章系统软件设计 (15) §5.1 内置T6963C控制器软件特性 (15) §5.2初始化子程序设计 (19) §5.3 串行通信子程序设计 (20) §5.4 显示控制子程序设计 (21) 第六章系统调试 (22) §6.1 分步调试 (22) §6.2 系统统一调试 (23) 结束语 (24) 附录 (25)
参考文献 (30) 致谢............................................. 错误!未定义书签。
电子时钟基于AT89c51单片机的设计 电子时钟原理图 开机显示仿真图: 当按下仿真键时电子时钟开机页面显示第一行显示JD12102Class--16,第二行显示动态TINE:12:00:04。 电子时钟调时间仿真图:当按下K1为1次时,光标直接跳到电子时钟的秒,可以按下K2进行调节。 当按下K1为2次时,光标直接跳到电子时钟的分,可以按下K2进行调节。 当按下K1为3次时,光标直接跳到电子时钟的时,可以按下K2进行调节。 当按下K1为4次时,光标直接跳完,电子时钟可以进行正常计时。 电子时钟闹钟调节仿真:当按下K3为1次时,直接跳到闹钟显示界面00:00:00,按下K2可以对闹钟的秒进行调节。 当按下K3为2次时,可以调到分,按下K2可以对闹钟的分进行调节。 当按下K3为3次时,可以调到时,按下K2可以对闹钟的时进行调节。 当按下K3为4次时,直接跳到计时界面,对闹钟进行到计时,时间到可以发出滴滴声。
#include<> #define uchar unsigned char //预定义一下 #define uint unsigned int uchar table[]="JD12102Class--21"; //显示内容 sbit lcden=P3^4; //寄存器EN片选引脚 sbit lcdrs=P3^5; //寄存器RS选择引脚 sbit beep=P3^6; //接蜂鸣器 extern void key1(); extern void key2(); extern void key3(); uchar num,hour=12,minite,second,ahour,aminite,asecond,a,F_k1,F_k2,F_k3; //定义变量 void delay(uint z) //延时 { uint x,y; for(x=z;x>0;x--) for(y=110;y>0;y--); } void write_com(uchar com) { lcdrs=0; P0=com; //送出指令,写指令时序 delay(5); lcden=1; delay(5); lcden=0; } void write_data(uchar date) { lcdrs=1; P0=date; //送出数据,写指令程序 delay(5); lcden=1; delay(5); lcden=0; }
单片机看门狗(Watchdog)的工作原理及其应用 2010年05月16日星期日 23:00 在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造成程序的跑飞,而陷入死循环。程序的正常运行被打断,由单片机控制的系统无法继续工作,会造成整个系统的陷入停滞状态,发生不可预料的后果。所以,出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的芯片,俗称"看门狗"(watchdog)。 看门狗电路的应用,使单片机可以在无人状态下实现连续工作,其工作原理是:看门狗芯片和单片机的一个I/O引脚相连,该I/O引脚通过程序控制它定时地往看门狗的这个引脚上送入高电平(或低电平),这一程序语句是分散地放在单片机其他控制语句中间的,一旦单片机由于干扰造成程序跑飞后而陷入某一程序段进入死循环状态时,写看门狗引脚的程序便不能被执行。这个时候,看门狗电路就会由于得不到单片机送来的信号。便在它和单片机复位引脚相连的引脚上送出一个复位信号。使单片机发生复位,即程序从程序存储器的起始位置开始执行,这样便实现了单片机的自动复位。 看门狗,又叫 watchdog timer,是一个定时器电路。一般有一个输入,叫喂狗(kicking the dog or service the dog),一个输出到MCU的RST端,MCU 正常工作的时候,每隔一端时间输出一个信号到喂狗端,给 WDT 清零。如果超过规定的时间不喂狗,(一般在程序跑飞时),WDT 定时超过,就会给出一个复位信号到MCU,是MCU复位,防止MCU死机。看门狗的作用就是防止程序发生死循环,或者说程序跑飞。 工作原理:在系统运行以后也就启动了看门狗的计数器,看门狗就开始自动计数,如果到了一定的时间还不去清看门狗,那么看门狗计数器就会溢出从而引起看门狗中断,造成系统复位。所以,在使用有看门狗的芯片时要注意清看门狗。 硬件看门狗是利用了一个定时器,来监控主程序的运行,也就是说在主程序的运行过程中,我们要在看门狗定时器定时时间到之前对其进行复位。如果出现死循环,或者说PC指针不能回来,那么定时时间到后就会使单片机复位。常用的WDT芯片如MAX813 ,5045, IMP 813等,价格4~10元不等。 软件看门狗技术的原理和这差不多,只不过是用软件的方法实现,我们还是以51系列来讲,我们知道在51单片机中有两个定时器,我们就可以用这两个定时器来对主程序的运行进行监控。我们可以对T0设定一定的定时时间,当产生定时中断的时候对一个变量进行赋值,而这个变量在主程序运行的开始已经有了一个初值,在这里我们要设定的定时值要小于主程序的运行时间,这样在主程序的尾部对变量的值进行判断,如果值发生了预期的变化,就说明T0中断正常,如果没有发生变化则使程序复位。对于T1我们用来监控主程序的运行,我们给T1设定一定的定时时间,在主程序中对其进行复位,如果不能在一定的时间里对其进行复位,T1 的定时中断就会使单片机复位。在这里T1的定时时间要设的大于主程序的运行时间,给主程序留有一定的的裕量。而T1的中断正常与否我们再由T0定时中断子程序来监视。这样就够成了一个循环,T0监视T1,T1监