2014年****工程训练综合能力竞赛
无碳小车设计报告
参赛者:
指导老师:
2014/10/15
1、设计概述
“无碳小车”是将重力势能转换为机械能,使小车实现行走及转向功能的装置。
小车由能量转换机构、传动机构、转向机构和车身构成,首先通过能量转换机构获得动力来驱动后轮转动,继而通过传动机构将运动传给转向机构使转向轮,利用横纵向直线运动复合运动使转向轮呈正弦波形周期性摆动,从而避开设置在波形内固有间距的障碍物。
具体设计为小车以1kg重物块下落500mm产生的重力势能作为动力,通过线绳带动齿轮轴等传动机构,单轮驱动;通过正弦机构带动前轮周期性摆动实现转向。无碳小车结构设计总装图如图所示。
2、设计思路和方案
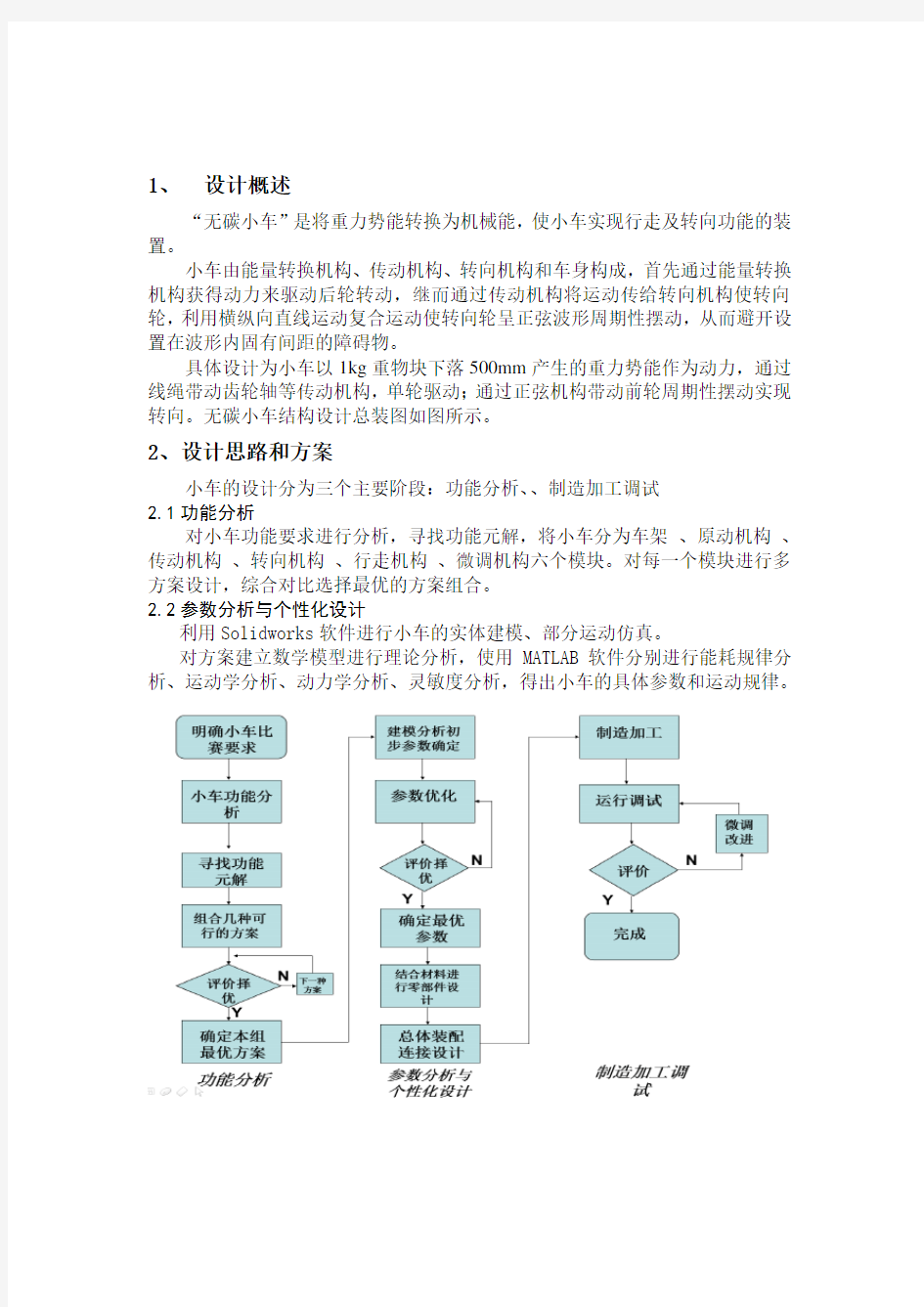
小车的设计分为三个主要阶段:功能分析、、制造加工调试
2.1功能分析
对小车功能要求进行分析,寻找功能元解,将小车分为车架、原动机构、传动机构、转向机构、行走机构、微调机构六个模块。对每一个模块进行多方案设计,综合对比选择最优的方案组合。
2.2参数分析与个性化设计
利用Solidworks软件进行小车的实体建模、部分运动仿真。
对方案建立数学模型进行理论分析,使用MATLAB软件分别进行能耗规律分析、运动学分析、动力学分析、灵敏度分析,得出小车的具体参数和运动规律。
2.3 机械总功能分解及功能元解
表1.势能转向小车形态学矩阵
2.4 机构选型基本原则
①满足工艺动作和运动要求。
②结构最简单,传动链最短。
③原动机的选择有利于简化结构和改善运动质量。
④机构有尽可能好的动力性能。
⑤机器操纵方便、调整容易、安全耐用。
⑥加工制造方便,经济成本低。
⑦具有较高的生产效率与机械效率。
2.5转向机构分析
目前,能够实现无碳小车车轮转向控制的机构主要有曲柄摇杆机构、正弦机构(曲柄移动导杆机构)、RSSR空间四杆机构凸轮推杆机构和圆轮导杆机构。这5 种机构在结构和功能上有各自的特点。转向机构是本小车设计的关键部分,直接决定着小车的功能。转向机构也同样需要尽可能的减少摩擦耗能,结构简单,零部件已获得等基本条件,同时还需要有特殊的运动特性。能够将旋转运动转化为满足要求的来回摆动。同样也
2.5.1曲柄摇杆机构
优点:连杆机构中的运动副为低副,其运动副元素为面接触,压力较小,易润滑,损耗能量少,且运动副一般是几何封闭,对保证小车行进的可靠性有利。
缺点:由于连杆机构的运动必须经过中间构件进行传递,因而构件数目多,传动路线长,若加工不能保证适当精度,易产生较大的误差积累,也使机械效率降低。
无急回曲柄摇杆机构是平面机构,要求曲柄处于前轮支架轴线的垂直面,要多一级转换机构。该机构对于摇杆与前轮角度的精度要求较高,装配难度较大,而且曲柄长度不具备调节功能,会导致摇杆摆角不对称。
2.5.2以正弦机构为转向机构
正弦机构摆角规律
正弦机构是目前无碳小车设计过程中常选用的转向机构之一,图为其机构简图,其曲柄可在小范围内调节,同样可控制无碳小车的前轮摆角。
图2.1
正弦机构有 2 个销槽副、一个移动副,曲柄具备调节功能,可以在小范围内调节小车的轨迹,调节性能较好
2.5.3 RSSR 空间四杆机构
RSSR 空间四杆机构有 2 个球副,机构简单,传动效率较高,但摇杆与前轮的角度难以控制,样具有安装精度高的特点
2.5.4凸轮推杆机构
优点:适当地设计出凸轮的轮廓曲线后就可以使推杆精准地实现所需的运动规律,而且响应快速
缺点:凸轮廓线与推杆之间为点、线接触,易磨损;凸轮精准制造较困难;需使用额外机构,利用弹簧力与使凸轮与推杆保持接触,
2.5.5圆轮导杆机构
此转向机构主要由转向杆、转向轮、短杆构成。转向盘与从动轴齿轮啮合。短杆一端通过销钉与转向杆连接在一起,可自由转动。另一端与转向轮的轴固定于小车的中心轴线处。当转向盘匀速转动,转向杆会周期性左右摆动,然后通过短杆的传动,可以实现转向轮的转向。从而控制小车绕开障碍物的整体运行。
优点:运动副自身几何封闭,不需要额外结构使运动副保持接触,易润滑,损耗能量较小,结构简单,轮廓加工制造容易。
缺点:摆动活动范围小,死点多。
正弦机构可以实现正反转角的完全对称,从功能上分析是作为无碳小车转向机构的最佳方案;
2.6传动机构分析
传动概述:传动机构的功能是把动力和运动传递到转向机构和驱动轮上。要使小车行驶的更远及按设计的轨道精确地行驶,传动机构必需传递效率高、传动稳定、结构简单重量轻等。
2.6.1齿轮传动机构
优点:齿轮具有效率高、适用的载荷和速度范围大、工作可靠、传动比稳定。 缺点:但价格较高,且传动距离比较短
2.6.2皮带轮传动机构
优点:具有结构简单、可以远距离传动、价格低廉、缓冲吸震无噪音等特点
缺点:其效率及传动精度并不高。
2.7组合方案择优并确定辅助、控制机构
在上述主要功能解组合方案确定后,接下来就是确定辅助、控制功能的机构。
2.7.1辅助机构:车架
为了降低车的重心,增加稳定性,在转弯时不易翻车,采用下沉式车架。
2.7.2微调机构
完整的机器包括:原动机构、传动机构、执行机构、控制机构。微调机构属于控制机构,由于加工误差和装配误差,小车的行进轨迹可能会发生偏移,必须加上微调机构,对误差进行修正。
综合各方面的因素,选用下图所示机构,使小车实现微调,通过拧紧螺母使圆柱相对圆心的距离固定,使此连接转向机构的小圆柱改变转速,从而改变前轮的完成一次转向时间。达到改变小车运动轨迹的目的。
图2.2圆轮微调机构
2.8设计方案确定
运动轨迹:小车运动轨迹曲线为x A Y πcos -=,出发点在波峰处。由于加工装调等方面均存在误差实际上小车轨迹的中心线是一条弯曲的曲线,对此,可以通过调整小车出发时车身和前轮的偏角来控制轨迹使小车轨迹在允许的范围内进行补偿,获得最好成绩。
转向机构:向机构采用正弦机构带动前轮周期性往复摆动来实现。
传动机构:采用一级齿轮传动,通过绕线轮带动驱动轮实现单轮驱动,采用锥形的绕线螺纹轴,既能够在启动阶段提供足够大的启动转矩,又可以在稳定后控制车速稳定轨迹;车身采用下沉式底板保证了小车重心低不易翻车。
原动机构:采用单轮子驱动机构,即右边轮子为驱动轮,左边轮子为从动轮。
轨迹调整方法:影响小车轨迹形换的因素有很多,我们要选择方便调节的结构来对小车的轨迹实现改变。在这里,我们采用同时调节曲柄工作长度(圆盘小圆柱到圆盘中心距)和更换轮子大小的方式来实现调节。当然理论分析结果与实际条件的结果是有差异的,这就需要我们再实际条件下不断的调试来获得可靠的数据。
出发点的确定:小车的初始位置的确定取决于三个参数,分别为小车出发点距离障碍物连线的距离,小车前轮的初始摆角,小车车身整体相对指定参照物的方向与位置,通过参照物标定前轮初始转角,尺子标定起点距障碍物连线距离。
3、设计结果
3.1运动分析
3.1.1运动循环图
时间轴:
图3.1机械运动循环图3.1.2机构运动简图与自由度分析
图3.2小车简图
自由度计算:
据平面机构自由度公式')'2(3F p p p n F
h l --+-=,其中n 指活动构件
数,l P 表示低副数目,h P 表示高副数目,
'p 表示虚约束数目,'F 表示局部自
由度数目,而据本车机构运动简图可知,
5,6,2,'0,'0l h n p p p F =====,代入计算可得整个机构自由度为1。
3.2运动学分析模型 符号说明:
绕线轴与驱动轴传动比 i 后轮半径R
后轮与车子中心线的距离a 曲柄工作长度r
推杆与车子中心线的距离b 前轮与后轮的距离d
(1)驱动
小车任意时刻绕绳轮的角速度ω 则曲炳转角
dt d *=ωα (3-1)
推杆推程
αcos *=r l (3-2)
小车移动路程
dt v ds *= (3-3)
(2)转向
当曲柄转角为α时,摇杆转角(前轮转角)为α,则
b
r α
θcos tan *=
(3-4) 解上述方程式可得θ和α的关系式 ()αθf = (3-5)
(3)小车行走轨迹
只有一个后轮做驱动轮时,当前轮转角为θ时,后轮转弯的曲率半径
+0.075l /b /abs l /b tan d
ρθ
=
?(()()) (3-6) 小车行走路程为ds 时,小车整体转角为
ρ
βds
d =
(3-7)
当小车转角为β时,后轮轨迹有
βcos *-=ds dx (3-8) βsin *=ds dy (3-9)
(4)小车其他轮轨迹
当驱动轮为左后轮A 时,此时以A 轮为参考,则在小车坐标系中 B 坐标为(2*a ,0) C 坐标为(a ,d )
在地面参考系中
??
?**-=**-=ββ
sin 2cos 2a y y a x x a b
a b (3-10) ??
?*+*-=*-*-=βββ
βcos sin sin cos d a y y d a x x a c
a c (3-11) (5) 小车参数设定
通过设定合理的参数,运用matlab 辅助仿真,可得到小车各轮子的轨迹。在上述列出的参数中,可通过微调机构调节的参数为曲柄长度r ,通过换装零件调节的参数为轮子直径D(半径R)。调节参数对小车主动轮轨迹的影响如下表所示。
表3.1
运用matlab分析软件,假设绳轮角速度已知(在传动比确定的条件,角速度不影响小车运动轨迹形状),设定表3.1中各参数的值,绘制小车主动轮的理想轨迹图象,直观反映上述表格内容,如图3.3所示:
图3.3 小车主动轮轨迹形状变化(红色字体表示Y方向位移)
理想状态下小车主动轮运动轨迹如上图所示。但在实际运动过程中,由于小车受到各种因素的限制,导致实际运动轨迹与理想运动分析轨迹存在偏差。而且,表中数据表明,要达到各种轨迹形状要求,必须同时调节曲柄工作长度和更换小车车轮,用于更换的轮子就有七套。综合以上两个因素,我们采用插值方式将轮子确定为190mm﹑220mm﹑250mm﹑280mm四个尺寸。由此可以得出结论:要得到可靠的与轨迹对应的r值和轮子大小,必须在真实条件下调试装配好的小车。
(6) 小车运动轨迹
根据4中其他轮子与驱动轮的关系可以推出其他轮的轨迹函数,在matlab中绘制
桩距为700mm时各轮子的运动轨迹如图所示。
图3.4小车各轮子运动轨迹Matlab程序见附录。
3.2动力学分析
要实现无碳小车的运动要求是重点
在运动分析中确定转弯半径r和转弯速度v
转盘上小圆柱到中心的距离:15mm
推杆和小车中心线的距离:50mm
前轮到后轮的距离:150mm
后轮直径250mm
绕线轮和后轮的传动比 1:3
(1) 启动阶段
重物下落
10F mg ma -= (3-12)
即有()01a g m F -= (3-13)
(m 重物质量,1F 绕绳所受拉力,0a 重物下落加速度) 重物下落时绕线轮获得一驱动力矩
11r F M *= (3-14)
(1F 为绳拉力,1r 为启动阶段绕线轮半径) 驱动力矩通过齿轮传动给后轮
20r F M *= (3-15)
(后轮等效驱动力0F ,2r 为后轮半径)
由此求出小车左后轮上的等效力0F ,而这个等效力的反作用力t F 就是小车前进的驱动力,即有t F F =0 (3-16)
图3.5驱动力分析
在小车起动过程中,前转向轮、右后轮作为从动轮受到的总静摩擦力为1f F 。若想要小车起动,则驱动力与总的摩擦力之间的关系应为:
111gf m F F f t => (3-17)
(1f —静摩擦力系数,1m —小车整车质量)
且有
11f t F F a m -= (3-18)
111gf m F f = (3-19)
t a v *= (3-20)
(1m 为小车总质量(包括重物),g 为重力加速度,1f 为静摩擦系数,a 为驱动加速度)驱动力t F 在t s 使小车达到转弯速度v
(2)匀速阶段
重物达到速度0v
t a v *=00 (3-21)
即00=a ,mg F =3 (3-22)
332r F M *= (3-23)
(3r 为匀速阶段绕线轮半径)
222r F M *= (3-24)
同样有一驱动力22t F F = (3-25)
在小车转弯时,地面除了给小车从动轮一个切向的动摩擦力fx F (gf m F fx 1=(3-26)),还提供:
一个法向的分力F 作为小车的向心力,他们的合力就是小车转弯时的总的动摩擦力
f F ,2
2fx
f F F F -= (3-27) 由向心力公式:r
v m F 2
1= (3-28)
可知,若转弯半径r 确定,转弯速度2v 与向心力F 成正比。v 越大,F 越大,进而f F 越大。当t f F F ≤时,小车所受阻力大,逐渐停下。因此,只有当t f
F F ≤,车速很低时,小车才能平稳匀速转弯。
3.3小车参数设计
(1)绕线轮半径设计
匀速阶段有f t F F =2 (3-29)
联立(3-22) (3-23) (3-24) (3-25) (3-27) (3-28) (3-29)得
()mg
r gf r
v m r η222
2
13*+???
? ?
?*=
(3-30)
(η为传动效率)代入数据得3r = 后轮达到线速度s m v /40.0=
22r v
*=ω (3-31)
3:1:21=ωω (3-32)
310r v *=ω (3-33)
代入数据得
联立(3-13) (3-14) (3-18) (3-19) (3-20) (3-21) (3-31) (3-32) (3-33)得
()?
?? ?
?*-**+*=
t r g m r f g t v m r 312
111/ω(3-34)
(2)车载载荷位置设计
车载载荷用于平衡小车,需确定最佳位置使小车平衡行走。
先假设一载荷质量,求出求出此时的位置参数e ,r ,然后通过不断地改变三脚架位置,使车载载荷质量不断减小,理想状态是使载荷重量变为0,小车都能平稳行走。 现假设g m 7507=,求出位置参数e ,r
动力系统分析
三角架放置位置已确定
小车未加重物时重心由solidworks 求出 假设重物m 以a 的加速度落下,根据牛顿第二定律和定滑轮特性必有T=m (g-a )(3-35) 设,根据力的合成,合力大小F=2Tcos (θ/2)(3-36),方向为南偏西θ/2
460
tan n
b -=
θ,三脚架高460mm
图3.6小车受力分析示意图
以小车为研究对象,受力如图4所示。其中重力g m *0,g m *(0m 为车架质量,m 为砝码质量),绳拉力T 是主动力,A F ,B F ,C F 为地面的约束力,此5个力互相构成空间平衡力系。
取坐标系Oxyz 如图所示,列出三个平衡方程:
0=∑y F ;02sin sin =*+*+*-???
?
??*-*f F f F f F F T C B A θθ
∑=0
Z
F
;
02cos cos 07=+++???
?
??*-*+*-*-C B A F F F F T g m g m θθ
∑=0x
M
02cos 4602sin sin cos 07=*???
? ??*-*???? ??*+**-**+**-*+**-b F F p T n T c g m a F r g m A θθθθ
=∑y
M
;
02cos cos 2207=*???
?
??*+**-**-???? ??*-???? ??*+**-m F m T h g m L F L F e g m c B θθ
=∑z
M
;
0222sin sin =???
? ??**+???? ??**-???? ??*-**L f F L f F F m T c B θθ 结论()gf
m mf
T mf T ghf m m T e 7202cos 2cos 1sin *????
??-*---=θθθ
2
2cos 2cos 207?
??
??---=θθT T g m g m F A 代入
∑=0x M 式得 g
m m T m T h g m L F L F e c B 700
2cos 2cos 2cos 22=*???
??*??? ??*+**-**-??? ??*-??? ??*=
θθθ
具体设计结合CAD 软件Solidworks 进行辅助设计,符合条件的e 值直接体现在小车的cad 模型上。
3.4稳定性分析
小车在行走过程中,会进行左右周期性的转向,则必然会出现转角最大的时候,也就是转弯半径R 最小的时候,此时,就是小车最容易侧翻的时候,由于小车是对称机构,其运动轨迹也是对称机构,所以小车的左右临界侧翻速度都一样,下面以小车的右侧侧翻为例,对小车的稳定性做一个系统的分析。
图3.7小车右侧翻受力分析示意图
以小车为研究对象,受力如图4所示。其中重力g m *0,g m *,绳拉力T 是主动力,
A F ,
B F ,
C F 为地面的约束力,此5个力互相构成空间平衡力系。
取坐标系Oxyz 如图所示,列出三个平衡方程:
0=∑y F ;02sin sin =*+*+*-???
?
??*-*f F f F f F F T C B A θθ
∑=0
Z
F
;
02cos cos 07=+++???
?
??*-*+*-*-C B A F F F F T g m g m θθ
∑=0
x
M
;
02cos 4602sin sin cos 07=*???
? ??*-*???? ??*+**-**+*-*+**-b F F p T n T g m a F r g m A θθθθ
=∑y
M
;
2cos cos 224000max 7=*???
?
??*+**-???? ??*-???? ??*+**-*-**-m F m T L F L F h g m F e g m c B θθ
=∑z
M
;
max 5sin sin 0222B c L L F b F c T m F F f
F f θθ??
????
*-*+**-*-**+**= ? ? ???
????
若小车出现右侧翻,则0=B F 结论可算得此时的A F ,B F ,C F 其中2max
max
min
v F m R =*(max F 为砝码向心力) 2max
50min
v F m R =*(5F 为车架向心力) min
max
5R v m F *
= min R 为重块的最小转弯直径
则1
min
max max m R F v *=
由此,可确定小车在行进过程中的最大速度,通过调节锥形绕线轮的大小则可改变速度,达到优化分析的目的。
总结:通过对无碳小车能耗规律模型的建立以及对动力系统的分析,优化了小车的结构,使小车在原有的基础上行驶更远距离,同时,通过对其进行的稳定性分析,限制其行驶速度,从而使小车平稳的行驶,达到了优化的最终目的。实际条件下,在保证车子行走距离的前提下,我们应该使v 尽量小,或者求出一个最大的v 值。通过设定绕线轮的半径来保证这一速度,进而使小车行走平稳,不致翻车。我们发现,我们设定的轨迹的最小半径r=3.125m ,由此得到的力F 远不及f F 大,因此在小车轨迹振幅较大时,可以不考虑。
4、制造方案及成本估算
主要零部件生产车架,传动轴等非标准件。载荷块(及徽标)轴承座,轴承,砝码,齿轮,螺纹紧固件等标准件均为外购。
制造方案
5、附录
5.1装配图
图5.1小车俯视图
图5.2小车右视图
?朕井令孑科技衣浄 GUILIN UNIVER3ITT OF ELECTRONIC TECHNOLOGY 机械原理课程设计报告书 设计题目:竞赛题目无碳小车的设计 课程名称:《机械原理课程设计》 学生姓名: 学生学号: 所在学院:海洋信息工程学院 学习专业:机械设计制造及其自动化 指导教师:宫文峰 2015年12月11日
目录 (2) 第一章概述 (3) 1.1 课程设计任务与目的 (3) 1.1.2 课程设计任务 (3) 1.2 无碳小车设计的目的与任务 (3) 第二章选题介绍 (4) 2.1 选题背景、意义 (4) 第三章总体设计 (4) 3.1 方案设计 (4) 3.1.3 传动机构 (5) 3.1.4 转向机构 (6) 3.1.5 行走机构 (7) 3.1.6 微调机构 (8) 第四章运动分析 (9) 4.1 用解析法进行机构的运动综合与分析 (9) 4.2 齿轮参数的分析 (12) 第五章设计小结 (12) 参考文献: (13)
第一章概述 机械原理课程设计是机械类各专业学生第一次课程设计,是重要的实践性教学环节,对于培养学生机械系统运动方案设计和创新设计能力、解决工程实际中机构分析和设计能力等 有着十分重要意义。 本次课程设计以第五届全国大学生工程能力综合训练竞赛“无碳小车”题目为基础,进 行创新设计。设计对题目进行了从新分解,运用课程内所学知识,通过查阅资料结合前人经 验,从几个方面进行方案的设计与分析选择,依据机械机构的设计理念,设计出一个完全依 靠重力势能提供动力,以平面转向机构实现周期性转向自动避让障碍物的轻质小车方案。 1.1课程设计目的与任务 1.1.1课程设计目的 1)综合运用机械原理课程的理论和实践知识,分析和解决与本课程有关的实际问题,促进所学理论知识的巩固、深入和归纳; 2)培养学生的创新设计能力、综合设计能力与团队协作精神; 3)加强学生动手能力的培养和工程实践的训练,提高学生针对实际需求进行创新思维、综合和工艺制作等实际工作能力; 4)提高学生运算、绘图、表达、运用计算机、搜集和整理资料能力; 5)为将来从事技术工作打基础。 1.1.2课程设计任务 结合一个简单或中等复杂程度的机械系统,让学生根据使用要求和功能分析,开拓思路,敢于创新,巧妙地构思其工作原理和选择工艺动作过程;由所选择的工作原理和工艺动作过 程综合应用所学过的各类常用机构的结构组成、运动原理、工作特点及应用场合等知识,进 行机构的选型、创新与组合,构思出各种可能的运动方案,并通过方案评价、优化筛选,选择最佳方案;就所选择的最佳运动方案,应用计算机辅助分析和设计方法(也可以使用图解法)进行机构尺度综合和运动分析;由运动方案和尺度综合结果绘制机构系统运动简图。 1.2无碳小车设计的目的与任务 设计一种小车,驱动其行走及转向的能量是根据能量转换原理,由给定重力势能转换而
无碳小车报告 一,无碳小车数据核算阶段 在小组分工中我主要负责soliworks设计,无碳小车主要要是计算取值。 首先第一天我们就确定了用曲柄摇杆机构。主要是因为我们采用了连接头这种有多个自由的的连接装置,才不会被卡死。接下来是计算正弦曲线的长度,苦学了近一天MATLAB才勉强算出来 最后我们综合考虑取了0.4-1-2.64这组数据,然后我们取得后轮半径是100cm最后算出传动比为4.2:1,所以我们决定选用4:1的比例(主要是因为市面的齿轮的齿数限制) 接下来是我们定的初始参数,轮子r=100mm d=4mm单向轴承csk8pp 车架150*200 齿轮齿数分别是40齿和10齿,前轮22*2 轴d=8 和立式轴承座! 对于转向差速问题,我们选用了单向轴承来实现差速,但是其实到后面好像没起什么作用,不知道是不是因为前轮的取材还是因为后轮本来就有问题,这都是后话了。 二,小车的加工阶段
当数据都出来的时候我们就开始加工了,本来我以为可以休息一下的,但是后来车架一直没有得到解决,主要是一开始我们就在纠结什么数控,其实想我们这种选用pc板的小车你用数控其实是很不方便的,就像我们把车轮平一样,没有想到我居然后面融了,就变形了,对此真的是一个败笔。希望后面的人可以注意一下这一点,有时候没有必要来时纠结一种方法,结果白白浪费了时间,到后面没办法就叫在塑料板上划线,然后手动加工了这是干的,接下来是负责数控编程,就洗轮子,小车的连杆摇杆和组装就是由我来了,我只能说小组的合作真的要相互配合,不然很容易出问题,在加工上才方向设计和加工时很有不同的, 比如这之前的车架布局 在后面的加工时发现组装时发生了干涉,我只能说是我们之前想的太美好。所以在设计的时候我们最好为自己后面组装留多点空间,不会到时会很尬尴,哎。不过后面还有问题就是因为重物
大学机械设计制造及其自动化特色专业 实践报告 设计项目:工业产品力学分析实践、工业产品材料分析与设计实践 班级: 实践小组名称: 报告撰写人: 提交日期:2012/6/17 大学机电工程系
目录 1 设计任务 (4) 1.1无碳小车整体动力学分析报告 (4) 1.2无碳小车各构件材料力学性能分析报告 (4) 1.3无碳小车典型零件材料组织分析 (4) 2 设计过程 (4) 2.1 机构设计 (4) 2.2 机构简图分析 (5) 2.2.1主要机构组成 (5) 2.2.2原理 (5) 2.2.3自由度分析 (5) 2.3 机构立体图分析 (6) 2.3.1车架 (8) 2.3.2原动机构 (8) 2.3.3转向机构 (8) 2.3.4行走机构 (9) 2.4 参数分析模型 (9) 2.4.1 动力学分析模型 (9) 2.4.2运动学分析模型 (10) 2.4.3急回运动特性、传动角、死点分析 (11) 2.4.4灵敏度分析模型 (12) 2.4.5参数确定 (13) 2.5零部件设计 (13)
3设计结果与总结 (14) 4参考文献 (14) 附:Matlab编程源代码 (15)
1 设计任务 1.1无碳小车整体动力学分析报告 含无碳小车各机构运动学分析(运动轨迹计算、机构各构件长度尺寸确定等) 无碳小车动力学分析,各运动副摩擦分析、各构件受力分析。 要求Matlab编程计算(附源代码) 1.2无碳小车各构件材料力学性能分析报告 含各构件强度分析、刚度分析 基于结构安全的无碳小车各构件结构优化方案。 要求Matlab编程计算(附源代码) 1.3无碳小车典型零件材料组织分析 取无碳小车中典型金属材料进行材料组织分析,给出3种以上材料试样制作方法、组织 照片等。 2 设计过程 2.1 机构设计 行进动作分解 小车主要由四个机构组成:发条动力机构、齿轮传动机构、曲柄连杆机构、连杆前轮转向机构。
第三届全国大学生无碳小车越障竞赛
工程管理设计报告
总 3 页 产品名称 零件名称
第 1 页 无碳小车
编号: 生产纲领 生产批量
500 台/年 42 台/月
1、工程管理方案概述
为实现安全、文明生产,保证按期供货,降低总成本,提高经济效益,对无碳小车的生产进行了工程管理设计。 装 年生产 500 台无碳小车,属中批量生产。无碳小车的大部分零件属于中高精度,必须保证每个零件的加工精度。通过相应的工程管理,使同种 零件应具有互换性、可靠性。例如:前轮支撑架等零件的生产工艺主要包括:车削、铣削和钳工修整。 生产过程中需要的一些标准件,如:轴承、螺钉、齿轮等外购。金属模铸造和热处理等工艺外协加工,其它工序及总装自主完成。
2、生产过程组织
①生产过程空间组织设计: 学校名称:扬州大学 针对无碳小车按每月 42 台的生产方式,综合考虑生产组织柔性,按工艺原则布置设施。无碳小车的生产工艺主要包括车、铣、线切割、钳。 ②生产过程时间组织设计: 订 根据无碳小车的主要零件的工艺特点,结合生产空间的布置原则,生产过程的时间组织选择顺序移动的方式。
3、主要设备资源配置
①确定生产节拍:无碳小车月产 42 台,按照一个月工作 22 天,每天一班工作 8 小时,时间利用率设为 90%,计算该零件的生产节拍为: r=Fe/N=(F0×g)/N=22×8×90%×60/42=226min/台 其中,r—节拍,Fe—计划期有效工作时间,N—计划期制品产量,F0—制度工作时间,g—时间有效利用系数。 ②确定流水线生产设备数量:针对无碳小车的主要加工件,由中批量生产工艺过程卡片得知,CD6140 车削加工工时 T1 为 59min,铣削加工工 线 时 T2 为 76min,钻床加工工时 T3 为 32min。生产的设备数为: H 普车 =T1/r=59/226=0.26; H 铣 =T2/r=51/226=0.23; H 钻=T3/r=32/226=0.14 因此,无碳小车零件加工成组流水生产线需要 CD6140 普通车床、普通铣床、台钻各 1 台。
-1-
根据本届竞赛题目对无碳小车(以下简称:小车)功能设计、徽标设计的要求,我们首先确定如下的设计思路: 1、根据能量守恒定律,物块下落的重力势能直接转 化为小车前进的动能时,能量损失最少,所以小 车前进能量来源直接由重物下落过程中减少的 重力势能提供为宜。 2、根据小车功能设计要求(小车在前行时能够自动 避开赛道上设置的障碍物),小车前进的路线具 有一定的周期性;考虑到小车转向时速度有损 失,小车前进的线路是命题设计要求的最优解。 3、结构的设计与成本分析、加工工艺设计统筹考 虑,力求产品的最优化设计。 4、徽标反映本届竞赛主题:无碳小车
以下是具体的设计方案介绍: 一、徽标设计(图1) 图1 (1)设计说明: 整个徽标是一个椭圆形的圈,包围着一个车轮,车轮下面写着“No Carbon”的字样。其中,车轮代表着我们所做的无碳小车。其后面是由众多抽象的“S”形条纹组成,代表着我们的无碳小车由所要求的“S”形跑到飞驰而出。其下的“No Carbon”字样简单明了地说明了这届大赛的主题,并且外面的椭圆圈,代表着能量的意识,说明了势能与动能相互转换的过程。最后,以整体上看,整个图形像一只眼睛。看着远方,对未来全球实现无碳充满希望。 (2)材料:45钢 (3)制作:激光打标机喷漆 外圈红色R:255 G:0 B:0 内圈红色R:170 G:0 B:0 “No”R:85 G:85 :B::85 “Carbon”R:170 G:0 B:0
车轮R :255 G :85 B :85 “S ”R :255 G :85~170 B :0~85 二、小车动力、动力—转向、转向系统 1、小车的动力系统(图2) (1)方案: 根据竞赛命题要求(小车前行过程中完成的所有动作所需的能量均重物下落减少重力势能转换获得,不可使用任何其他的能量形式)及能量守恒定律,物块下落的重力势能直接转化为小车前进的动能时,能量损失最少,所以以绳拉力为动力为宜。拉力作用于锥型原动轮(以下简称:原动轮)上,形成力矩,力矩对该原动轮产生转动效应,通过一系列齿轮的传动,将动力输出,使后轮转动,小车前进。 (2)以上方案作用: ①由于设计该小车的前进过程是 静止—加速—匀速—减速 的过程,所以开始时拉力的作用点处在原动轮半径较大处,并且随 着小车的前进,拉力作用点距离原动轮的轴线的距离呈递减的线
第三届福建省大学生工程训练 综合能力竞赛 无碳小车设计说明书 参赛者:邓磊林源兴趣詹发星 指导老师:张宁 学校:福建工程学院 地点:福建福州 时间:2015年1月1-2日
摘要 第三届福建省大学生工程训练综合能力竞赛命题主题为“无碳小车越障竞赛”,并为接下来的第四届国赛做好准备。我们在设计小车过程中特别注重设计的方法,力求通过对命题的分析得到清晰开阔的设计思路;作品的设计做到有系统性规范性和创新性;设计过程中综合考虑材料、加工、制造成本等给方面因素。我们借鉴了参数化设计、优化设计、系统设计等现代设计发发明理论方法;采用了MATLAB、PROE、CATIA等软件辅助设计。 我们把小车的设计分为三个阶段:方案设计、技术设计、制作调试。通过每一阶段的深入分析、层层把关,是我们的设计尽可能向最优设计靠拢。 方案设计阶段根据小车功能要求我们根据机器的构成(原动机构、传动机构、执行机构、控制部分、辅助部分)把小车分为车架、原动机构、传动机构、转向机构、行走机构、微调机构六个模块,进行模块化设计。分别针对每一个模块进行多方案设计,通过综合对比选择出最优的方案组合。我们的方案为:车架采用三角底板式、原动机构采用了锥形轴、传动机构采用齿轮、转向机构采用曲柄连杆、行走机构采用双轮驱动、微调机构采用微调螺母螺钉。其中转向机构利用了调心轴承、关节轴承。 技术设计阶段我们先对方案建立数学模型进行理论分析,借助MATLAB分别进行了能耗规律分析、运动学分析、动力学分析、灵敏度分析。进而得出了小车的具体参数,和运动规律。接着应用PROE软件进行了小车的实体建模和部分运动仿真。在实体建模的基础上对每一个零件进行了详细的设计,综合考虑零件材料性能、加工工艺、成本等。 小车大多是零件是标准件、可以购买,同时除部分要求加工精度高的部分需要特殊加工外,大多数都可以通过手工加工出来。对于塑料会采用自制的‘电锯’切割。因为小车受力都不大,因此大量采用胶接,简化零件及零件装配。调试过程会通过微调等方式改变小车的参数进行试验,在试验的基础上验证小车的运动规律同时确定小车最优的参数。
机械原理课程设计报告书 设计题目: 竞赛题目无碳小车的设计 课程名称:《机械原理课程设计》 学生姓名: 学生学号: 所在学院:海洋信息工程学院 学习专业:机械设计制造及其自动化 指导教师:宫文峰 2015年12月11日目录 (2) 第一章概述 (3) 课程设计任务与目的 (3)
第一章概述 机械原理课程设计是机械类各专业学生第一次课程设计,是重要的实践性教学环节,对于培养学生机械系统运动方案设计和创新设计能力、解决工程实际中机构分析和设计能力等有着十分重要意义。 本次课程设计以第五届全国大学生工程能力综合训练竞赛“无碳小车”题目为基础,进行创新设计。设计对题目进行了从新分解,运用课程内所学知识,通过查阅资料结合前人经验,从几个方面进行方案的设计与分析选择,依据机械机构的设计理念,设计出一个完全依靠重力势能提供动力,以平面转向机构实现周期性转向自动避让障碍物的轻质小车方案。 课程设计目的与任务 课程设计目的 1)综合运用机械原理课程的理论和实践知识,分析和解决与本课程有关的实际问题,促进所学理论知识的巩固、深入和归纳; 2)培养学生的创新设计能力、综合设计能力与团队协作精神; 3)加强学生动手能力的培养和工程实践的训练,提高学生针对实际需求进行创新思维、
综合和工艺制作等实际工作能力; 4)提高学生运算、绘图、表达、运用计算机、搜集和整理资料能力; 5)为将来从事技术工作打基础。 课程设计任务 结合一个简单或中等复杂程度的机械系统,让学生根据使用要求和功能分析,开拓思路,敢于创新,巧妙地构思其工作原理和选择工艺动作过程;由所选择的工作原理和工艺动作过程综合应用所学过的各类常用机构的结构组成、运动原理、工作特点及应用场合等知识,进行机构的选型、创新与组合,构思出各种可能的运动方案,并通过方案评价、优化筛选,选择最佳方案;就所选择的最佳运动方案,应用计算机辅助分析和设计方法(也可以使用图解法)进行机构尺度综合和运动分析;由运动方案和尺度综合结果绘制机构系统运动简图。无碳小车设计的目的与任务 设计一种小车,驱动其行走及转向的能量是根据能量转换原理,由给定重力势能转换而得到的。该给定重力势能由质量为1Kg的标准砝码(¢50×65 mm,碳钢制作)来获得,砝码的可下降高度为400±2mm。标准砝码始终由小车承载,不从小车上掉落。图1为小车示意图。 小车在行走过程中完成所有动作所需的能量均由此给定重力势能转换而得,小车具有转 向控制机构,且此转向控制机构具有可调节功能。 第二章选题介绍 选题背景、意义 本设计源于6年第五届全国大学生工程能力综合训练竞赛“无碳小车”,该竞赛要求以
第二届全国大学生工程训练综合能力竞赛 无碳小车设计 参赛者: 张雪飞赵鹏飞刘述亮 指导老师: 朱政强戴莉莉 -1-16 摘要 第二届全国大学生工程训练综合能力竞赛命题主题为” 小 无碳车”。在设计小车过程中特别注重设计的方法, 力求经过对命题 的分析得到清晰开阔的设计思路; 作品的设计做到有系统性规范性和
创新性; 设计过程中综合考虑材料、加工、制造成本等给方面因素。我们借鉴了参数化设计、优化设计、系统设计等现代设计发创造理论方法;采用了MATLAB PROE等软件辅助设计。 我们把小车的设计分为三个阶段: 方案设计、技术设计、制作 调试。经过每一阶段的深入分析、层层把关, 是我们的设计尽可能向 最优设计靠拢。 方案设计阶段根据小车功能要求我们根据机器的构成(原动机 构、传动机构、执行机构、控制部分、辅助部分)把小车分为 车架、原动机构、传动机构、转向机构、行走机构、微调 机构六个模块, 进行模块化设计。分别针对每一个模块进行多方案设 计, 经过综合对比选择出最优的方案组合。我们的方案为: 车架采用 三角底板式、原动机构采用了锥形轴、传动机构采用齿轮或没有该 机构、转向机构采用曲柄连杆、行走机构采用单轮驱动实现差速、 微调机构采用微调螺母螺钉。其中转向机构利用了调心轴承、关节轴 承。 技术设计阶段我们先对方案建立数学模型进行理论分析, 借助 MATLAB分别进行了能耗规律分析、运动学分析、动力学 分析、灵敏度分析。进而得出了小车的具体参数, 和运动规律。接着 应用PROE软件进行了小车的实体建模和部分运动仿真。在实体建模 的基础上对每一个零件进行了详细的设计, 综合考虑零件材料性能、 加工工艺、成本等。 小车大多是零件是标准件、能够购买, 同时除部分要求加工精度
第三届山东大学大学生工程训练综合能力竞赛结构设计报告总页第 1 页产品名称:无碳小车编号 1、设计概述 设计原则: A.整车的重心要低,操作、调整方便灵活; B.结构尽量简单,传动件数少; C.质量小,足够的刚度,振动小; 2、设计方案 按照命题要求小车必须具有方向自控功能, 绕过直线布置的每隔1 米1 个障碍物的要求。小车必 须左转、右转再左转地周期性转向, 在速度一定的前提下, 必须要保证小车的运动轨迹曲率是连续变 化的, 小车才能平稳行驶。因此, 曲柄匀速转动, 摇杆左右匀速摆动的曲柄摇杆机构可以作为转向机 构, 小车运行轨迹接近正弦曲线, 曲率变化连续。从滚筒轴的回转运动到控制前轮转向的摇杆的水平 摆动, 需要把竖直平面的运动转化为水平面运动, 以实现小车的转向。要实现把竖直平面的运动转化 为水平面运动, 可以选用变形的曲柄摇杆机构来实现转向轮转向的方案,见下图4。曲柄摇杆机构中 的曲柄回转中心(即滚筒轴轴心) 应与摇杆的摆动平面等高,保证机构无急回特性, 曲柄作等速转动, 摇杆摆动时左右行程的平均速度相等, 即使得前轮左右摆幅相同, 按照指定轨迹行驶。把铅垂平面的 运动转化为水平面运动是个三维空间的运动转换, 通用的曲柄摇杆机构不能完成三维空间的运动转 换, 因此必须采用双球型关节的连杆, 使得水平与垂直方向的自由度都不受约束。为了提高运行过程 的精度和降低加工难度,可设计成四个圆柱关节, 安装成水平和竖直形式(如下图4 所示), 代替双球 型关节, 最终实现了与滚筒轴连接的曲柄的回转运动转化为摇杆的水平运动, 摇杆在水平面内摆动, 使得前轮左右摆幅相同, 实现了小车前轮的转向问题, 且保证了传动的准确。 根据图2 行走示意图, 采用余弦函数: Y=-0.35cosπx, 周期T=2 m 的曲线拟合小车行驶路径图1:小车的三维视图
无碳小车结构设计 方案
第五届全国大学生工程训练综合能力竞赛 The 5th National Undergraduate Engineering Training Integration Ability Competition 结构设计方案 Structure Design Scheme 编 号 (此栏由赛务工作人员填 写) 装 订 学校名称:湖南文理学院芙蓉学院 参赛项目:无碳小车
第五届全国大学生工程训练综合能力竞赛 The 5th National Undergraduate Engineering Training Integration Ability Competition 结构设计方案 Structure Design Scheme 参赛项目 无碳小车S 型赛道 4、结构设计创新特色说明 小车设计一定要做到目标明确,经过对命题的重复研究得到一些启发,今年的命题相对于往年, 有较大的改变,规则改为经现场公开抽签,在±200~300mm 范围内产生一个“S ”型赛道第一轮障碍 物 间 距 变 化 值 和 变 化 方 向 。 竞赛小车在前行时能够自动绕过赛道上设置的障碍物,如图2。赛道宽度为2米,障碍物为直径20mm 、高200mm 的圆棒,沿赛道中线从距出发线1米处开始按间距1米摆放,摆放完成后,将偶数位置的障碍物按抽签得到的碍物间距变化值和变化方向进行移动(正值远离,负值移近),形成的即为竞赛时的赛道。这样一来就不能借鉴往年的方案,同时还必须综合考虑材料、加工、制 造、成本等各方面因素考虑。 小车的传动比和转向机构的设计是小车性能的关键。在设计方法上我们借鉴参数化设计,优化设计,系统设计等现代设计创造理论,采用CAD,PROE 等软件辅助设计设计流程如下图: ’ 产品名称 小车 共 7 页 第 2 页 编 号 装 订 学校名称:湖南文理学院芙蓉学院 参赛项目:无碳小车
2015(第四届)山东省大学生工程训练综合能力竞赛 结构设计报告 总 5 页 第 1 页 产品名称:无碳小车 编号 1.设计概述 设计原则: 整车的重心要低,操作、调整方便灵活;结构尽量简单,传动件数少;质量小,足够的刚度,运动平稳。 2.设计方案 通过对小车的功能分析,小车需要完成重力势能的转换、驱动自身行走、自动避开障碍物。为了方便设计这里根据小车所要完成的功能将小车划分为六个部分进行模块化设计,分别是:车架 、原动机构 、传动机构 、转向机构 、行走机构 和微调机构,下面将详细介绍这六个模块。 2.1车架 车底板因不需承受很大的力,精度要求不是很高,考虑到加工方便、质量轻、成本低等因素,底板选用厚度为6mm 的铝板,尺寸定为143.5mm × 115mm 。小车运行起来按避障要求左右转向,引绳带动重块在重力的作用下将大幅摆动,可以通过降低小车底板距离地面的高度来降低整车的重心,为此将小车底板折弯,满足整车重心降低的需要。 2.2原动机构 原动机构的作用是将重块的重力势能转化为小车的驱动力。小车对此机构主要有以下要求: 驱动力适中,不至于小车拐弯时速度过大倾翻,或重块晃动厉害影响行走。到达终点前重块竖直方向的速度要尽可能小,避免对小车过大的冲击。同时使重块的动能尽可能的转化到驱动小车前进上,如果重块竖直方向的速度较大,重块本身还有较多动能未释放,能量利用率不高。由于不同的场地对轮子的摩擦可能不一样,在不同的场地小车是需要的动力也不一样。在调试时也不知道多大的驱动力恰到好处。因此还需要能根据不同的需要调整其驱动力。 在此结构中应让重块保持一定高度的支架以及重块带动车体的连接部件,考虑到立柱在满足一定强度的基础上需尽可能的轻,我们选用φ6铝棒材料。为了避免小车在行驶过程中,重块晃动过大,极易造成翻车现象, 通过多次的改进最终采用的是四根立柱,既轻便又稳固,达到预期效果。 至于滑轮,由于车体及车轮均采用铝板而不是材质较轻的雅格利板、碳板,车体较重,小车不易起动。定滑轮即稳定又容易改变力的方向,故选用了定滑轮。 2.3传动机构 传动机构的功能是把动力和运动传递到转向机构和驱动轮上。它的优劣直接决定了小车的性能,能量是否充分利用,转向是否精确皆取决于此。我们决定采用齿轮传动,它具有结构紧凑、可靠性好、效率高、传动稳定等特点。由于小车只绕8字走三圈,需提高小车的速度,减少能量的损失。 因此传动机构选择了传动比5:1的一级齿轮传动。在齿轮材质的选择上,综合考虑到齿轮材质轻、价格便宜、规格齐全并能满足小车所需齿轮强度要求,故采用铝制齿轮。 学校 名 称: 参赛项 目: 8子 型赛 道常 规 赛 装 订 线
“8”字无碳小车设计方案 一绪论 1.竞赛题目 设计一种小车,驱动其行走及转向的能量是根据能量转换原理,由给定重力势能转 换而得到的。该给定重力势能由竞赛时统一使用质量为1Kg的标准砝码(¢50×65 mm,碳钢制作)来获得4J能量,要求砝码的可下降高度为400±2mm。标准砝码始终由小车承载,不允许从小车上掉落。图1为小车示意图。 图一 要求小车在行走过程中完成所有动作所需的能量均由此给定重力势能转换而得,不可以使用任何其他来源的能量。要求小车具有转向控制机构,且此转向控制机构具有可调节功 能,以适应放有不同间距障碍物的竞赛场地。要求小车为三轮结构。在300~500mm范围内产生一个“8”字型赛道障碍物间距值。 2.工作原理 重物块从距小车底板400mm的高处下落,带动主动轴转动,使小车运动,再通过齿轮 传动和转向结构,实现在转动一定周期时,小车进行方向的改变,从而实现8字的运动轨迹。 3.设计方法 通过对命题的分析,我们小组有了一个比较清晰的思路。我们在网上搜集资料,对每个结构的各种方案进行了比较,再结合我们的实际情况和自己想法,最后确定了以下结构。对于各种参数的确定,我们只要是对齿轮进行了计算,其他参数是在原有的基础上进行了修改。 在设计过程中,我们主要采用了Auto CAD、Solidworks软件进行辅助设计。
二设计部分 1车架 车架受力小,精度要求低,考虑到铝板密度小,强度对于小车也足够,而且 方便加工,故本次制作选择3mm厚铝板。 由于我们是后轮单轮驱动,前导向轮与驱动轮的横向距离过大会使小车在绕行8字时轨迹不对称,即一个圆大一个圆小。为避免这种情况我们将驱动轮与导向轮的横向距离取消。 2原动机构 原动机构是把重物的重力势能转化为小车动能的装置。 要求 1.驱动力适中,不至于小车转弯时速度过大倾翻。 2.启动时提供足够的加速度使小车开始行走。 3.到达终点时的速度要尽可能小,避免对小车过大的冲击。同时使重块的动 能尽可能的转化到驱动小车前进上,如果重块竖直方向的速度较大,不仅浪费了重物的动能,下落时对车架的冲击还会影响小车的运动。 4.不同场地对驱动力的要求不同,因此原动机构需要能调节驱动力。
2014年****工程训练综合能力竞赛 无碳小车设计报告 参赛者: 指导老师: 2014/10/15
1、设计概述 “无碳小车”是将重力势能转换为机械能,使小车实现行走及转向功能的装置。 小车由能量转换机构、传动机构、转向机构和车身构成,首先通过能量转换机构获得动力来驱动后轮转动,继而通过传动机构将运动传给转向机构使转向轮,利用横纵向直线运动复合运动使转向轮呈正弦波形周期性摆动,从而避开设置在波形内固有间距的障碍物。 具体设计为小车以1kg重物块下落500mm产生的重力势能作为动力,通过线绳带动齿轮轴等传动机构,单轮驱动;通过正弦机构带动前轮周期性摆动实现转向。无碳小车结构设计总装图如图所示。 2、设计思路和方案 小车的设计分为三个主要阶段:功能分析、、制造加工调试 2.1功能分析 对小车功能要求进行分析,寻找功能元解,将小车分为车架、原动机构、传动机构、转向机构、行走机构、微调机构六个模块。对每一个模块进行多方案设计,综合对比选择最优的方案组合。 2.2参数分析与个性化设计 利用Solidworks软件进行小车的实体建模、部分运动仿真。 对方案建立数学模型进行理论分析,使用MATLAB软件分别进行能耗规律分析、运动学分析、动力学分析、灵敏度分析,得出小车的具体参数和运动规律。
2.3 机械总功能分解及功能元解 表1.势能转向小车形态学矩阵 2.4 机构选型基本原则 ①满足工艺动作和运动要求。 ②结构最简单,传动链最短。 ③原动机的选择有利于简化结构和改善运动质量。 ④机构有尽可能好的动力性能。 ⑤机器操纵方便、调整容易、安全耐用。 ⑥加工制造方便,经济成本低。 ⑦具有较高的生产效率与机械效率。 2.5转向机构分析 目前,能够实现无碳小车车轮转向控制的机构主要有曲柄摇杆机构、正弦机构(曲柄移动导杆机构)、RSSR空间四杆机构凸轮推杆机构和圆轮导杆机构。这5 种机构在结构和功能上有各自的特点。转向机构是本小车设计的关键部分,直接决定着小车的功能。转向机构也同样需要尽可能的减少摩擦耗能,结构简单,零部件已获得等基本条件,同时还需要有特殊的运动特性。能够将旋转运动转化为满足要求的来回摆动。同样也 2.5.1曲柄摇杆机构 优点:连杆机构中的运动副为低副,其运动副元素为面接触,压力较小,易润滑,损耗能量少,且运动副一般是几何封闭,对保证小车行进的可靠性有利。 缺点:由于连杆机构的运动必须经过中间构件进行传递,因而构件数目多,传动路线长,若加工不能保证适当精度,易产生较大的误差积累,也使机械效率降低。 无急回曲柄摇杆机构是平面机构,要求曲柄处于前轮支架轴线的垂直面,要多一级转换机构。该机构对于摇杆与前轮角度的精度要求较高,装配难度较大,而且曲柄长度不具备调节功能,会导致摇杆摆角不对称。
第二届全国大学生工程训练综合能力竞赛机械加工工艺方案设计总3页第1页编号: 产品名称无碳小车生产纲领600台/年零件名称前插生产批量50台/月 材料45钢毛坯种类棒料毛坯外形尺寸?24×570mm 每毛坯可制作件数 6 每台件数 1 备注 序号工序 名称 工序内容工序简图 机床 夹具 刀具 量具 附具 工时 (min) 1 锯锯切?26×570mm的毛坯料G4025 锯床 平口虎 钳 锯米尺 1.5 2 车1车端面 2车?23外圆 3粗车?12?10?6外圆 4精车?10?8外圆保证其同心度 ?0.06 C6140 车床 三爪卡 盘 90°左偏 刀 游标卡 尺,千分 尺 8 3 铰1铰M6螺纹 C6140 车床M5板牙 游标卡 尺 0.5
三爪卡盘 4 车1车断C6140 车床 三爪卡 盘 车断刀 游标卡 尺 0.5 5 铣 1粗铣四平面至15×19 2精选四平面至14×18 X5032 铣床 平口虎 钳 ?40端 铣刀 游标卡 尺 8 6 画线1画出?5孔圆心位置钳工工 作台 画针 高度尺 0.5 7 钻1钻?5孔Z3035 摇臂钻 床 ?5麻花 钻头 游标卡 尺 0.5
平口虎钳 8 铣 1铣U 型槽 X5032 铣床 平口虎钳 ?5立铣刀 游标卡 尺 4 9 线切割 1线切割出U 型槽 DK7725数控电 火花线切割 压板,螺栓,垫铁 线切割丝 游标卡尺 扳手 28 刘士强 2011-5-10 编制(日期) 审核(日期) 标准化(日期) 会签(日期) 标记 处数 更改文件号 签字 日期 2011-5-10 2011-5-12 2011-5-13 2011-5-13 装 订 线 学校名称:东北林业大学
第二届全国大学生工程训练综合能力 竞赛 无碳小车设计说明书 参赛者:龚雪飞赵鹏飞刘述亮 指导老师:朱政强戴莉莉 2011-1-16
摘要 第二届全国大学生工程训练综合能力竞赛命题主题为“无碳小车”。在设计小车过程中特别注重设计的方法,力求通过对命题的分析得到清晰开阔的设计思路;作品的设计做到有系统性规范性和创新性;设计过程中综合考虑材料、加工、制造成本等给方面因素。我们借鉴了参数化设计、优化设计、系统设计等现代设计发发明理论方法;采用了MATLAB、PROE等软件辅助设计。 我们把小车的设计分为三个阶段:方案设计、技术设计、制作调试。通过每一阶段的深入分析、层层把关,是我们的设计尽可能向最优设计靠拢。 方案设计阶段根据小车功能要求我们根据机器的构成(原动机构、传动机构、执行机构、控制部分、辅助部分)把小车分为车架、原动机构、传动机构、转向机构、行走机构、微调机构六个模块,进行模块化设计。分别针对每一个模块进行多方案设计,通过综合对比选择出最优的方案组合。我们的方案为:车架采用三角底板式、原动机构采用了锥形轴、传动机构采用齿轮或没有该机构、转向机构采用曲柄连杆、行走机构采用单轮驱动实现差速、微调机构采用微调螺母螺钉。其中转向机构利用了调心轴承、关节轴承。 技术设计阶段我们先对方案建立数学模型进行理论分析,借助MATLAB 分别进行了能耗规律分析、运动学分析、动力学分析、灵敏度分析。进而得出了小车的具体参数,和运动规律。接着应用PROE软件进行了小车的实体建模和部分运动仿真。在实体建模的基础上对每一个零件进行了详细的设计,综合考虑零件材料性能、加工工艺、成本等。 小车大多是零件是标准件、可以购买,同时除部分要求加工精度高的部分需要特殊加工外,大多数都可以通过手工加工出来。对于塑料会采用自制的‘电锯’切割。因为小车受力都不大,因此大量采用胶接,简化零件及零件装配。调试过程会通过微调等方式改变小车的参数进行试验,在试验的基础上验证小车的运动规律同时确定小车最优的参数。 关键字:无碳小车参数化设计软件辅助设计微调机构灵敏度分析
无碳小车设计报告 一、设计理念 煤炭是大自然给予人类的一笔宝贵财富,可是由于人们对煤炭的巨大需求,煤炭资源日趋减少近于枯竭。随着人们节能环保意识的提升,无碳的理念也越来越被人们提上研究的课题。更洁净、更环保、更节能、更高效的理念也深入人心。无碳小车是对“无碳”理念的探索与开发,对未来“无碳”的憧憬。本小车依照现代工程师的标准,注重设计的巧妙、制作的精良、调试的可靠性等。与其他类似的模型小车相比,本小车更注重能量的利用、车体结构的稳定性、匀速性等;采用的柔性摆杆机构更涉及了诸多数学理论的验证;,且使小车控制转弯更省力、使小车的躲避障碍物的周期更容易实现与控制,亦降低了整车重量。再者小车整体构造简洁,组合零件不多,摩擦损耗小,效率高,较容易制造安装。在完成设计的要求下充分考虑了外观和成本等问题,方便以后的扩展和进一步的开发。并能满足大部分初高中及大学学生对机械知识实践的实验与了解。对激发青少年对机械构造的热情有深远的影响。适合广大青少年学习研究。 二、无碳小车设计要求 设计说明: 以重力势能驱动的具有方向控制功能 的自行小车 设计一种小车,驱动其行走几转向的能 量是根据能量转换原理,由给定重力势能转 换来的。力势能为4焦耳(g=10m/s^2),给定统一质量为1kg 的重块,落差为400mm ,重块落下后,须被小车承载并同小车一起运动,不允许从小车上掉落。 小车宏观尺寸限制在:长*宽=200*100mm 本项目对应知识点:三维制图、二维制图、能量转换机构、杆机构(平面、空间)、运动学、力学、常用机构、材料零部件选型,机构的设计与制造。 具体要求: 1、小车需自主设计并制作全部零件(标准件:如重块有特定要求,统一购买或规定)。 2、小车要求采用四轮结构(2个转向轮,2个驱动轮),转向轮最大外径应不小于φ30mm ,整车具体结构、造型以及材料选用均由参赛者自主设计完成。 3、起动时,小车的中心线必须与赛道中心线重合,允许最大偏离距离为左右各20mm 。 ↑赛道示意图
第二届全国大学生工程训练综合能力竞赛无碳小车设计说明书 王金卫参赛者: 指导老师:刘吉兆陈丰峰2011-1-16 1 摘要 第二届全国大学生工程训练综合能力竞赛命题主题为“无碳小车”。在设计小车过程中特别注重设计的方法,力求通过对命题的分析得到清晰开阔的设计思路;作品的设计做到有系统性规范性和创新性;设计过程中综合考虑材料、加工、制造成本等给方面因素。我们借鉴了参数化设计、优化设计、系统设计等现代设计发发明理论方法;采用了MATLAB、PROE等软件辅助设计。
我们把小车的设计分为三个阶段:方案设计、技术设计、制作调试。通过每一阶段的深入分析、层层把关,是我们的设计尽可能向最优设计靠拢。 方案设计阶段根据小车功能要求我们根据机器的构成(原动机构、传动机构、执行机构、控制部分、辅助部分)把小车分为车架、原动机构、传动机构、转向机构、行走机构、微调机构六个模块,进行模块化设计.使其每个零件或结构件具有平衡性已达到减小摩擦.提高校车整体平衡的目的。分别针对每一个模块进行多方案设计,通过综合对比选择出最优的方案组合。我们的方案为:车架采用三角底板式、原动机构采用了锥形轴、传动机构采用齿轮或没有该机构、转向机构采用四连杆机构、行走机构采用单轮驱动实现差速、微调机构采用微调螺母螺杆。其中转向机构利用了调心轴承、关节轴承.圆锥滚子轴承。 技术设计阶段我们先对方案建立数学模型进行理论分析,借助MATLAB分别进行了能耗规律分析、运动学分析、动力学分析、灵敏度分析。进而得出了小车的具体参数,和运动规律。接着应用PROE软件进行了小车的实体建模和部分运动仿真。在实体建模的基础上对每一个零件进行了详细的设计,综合考虑零件材料性能、加工工艺、成本等。 小车大多的零件是标准件、可以购买,同时除部分要求加工精度高的部分需要特殊加工外,大多数都可以通过手工加工出来。对于塑料会采用自制的‘电锯'切割。因为小车受力都不大,因此大量采用胶接,简化零件及零件装配。 2 调试过程会通过微调等方式改变小车的参数进行试验,在试验的基础上验证小车的运动规律同时确定小车最优的参数。 关键字:无碳小车参数化设计软件辅助设计微调机构灵敏度分析目录 摘要 (2) 一绪论 (5) 1.1本届竞赛命题主题 (5) 1.2小车功能设计要求 (5) 1.3小车整体设计要求 (6) 1.4小车的设计方法 (6) 二方案设计 (7) 2.1车架 (10) 2.2原动机构 (10) 2.3传动机构 (11) 2.4转向机构 (12) 2.5行走机构 (14) 2.6微调机构 (15) 三技术设计 (16) 3.1建立数学模型及参数确定 (17) 3.1.1能耗规律模型 (17) 3.1.2运动学分析模型 (19) 3.1.3动力学分析模型 (24) 3.1.4灵敏度分析模型 (26)
目录 一任务书 (1) 二方案设计分析 (2) 2.1车架 (3) 2.2原动机构 (4) 2.3传动机构 (4) 2.4转向机构 (4) 2.5行走机构 (6) 2.6微调机构 (7) 三运动参数及构件尺寸计算 (7) 3.1建立数学模型及参数确定 (7) 3.1.1能耗规律模型 (8) 3.1.2运动学分析模型 (9) 3.1.3动力学分析模型 (13) 3.1.4参数确定 (14) 四设计总结 (15) 五参考资料目录 (15)
二设计方案分析 通过对小车的功能分析小车需要完成重力势能的转换、驱动自身行走、自动避开障碍物。为了方便设计这里根据小车所要完成的功能将小车划分为五个部分进行模块化设计(车架、原动机构、传动机构、转向机构、行走机构、微调机构)。为了得到令人满意方案,采用扩展性思维设计每一个模块,寻求多种可行的方案和构思。下面为我们设计图框(图一) 图一
在选择方案时应综合考虑功能、材料、加工、制造成本等各方面因素,同时尽量避免直接决策,减少决策时的主观因素,使得选择的方案能够综合最优。 图二 2.1车架 车架不用承受很大的力,精度要求低。考虑到重量加工成本等,车架采用木材加工制作成三角底板式。可以通过回收废木材获得,已加工。
2.2原动机构 原动机构的作用是将重块的重力势能转化为小车的驱动力。能实现这一功能的方案有多种,就效率和简洁性来看绳轮最优。小车对原动机构还有其它的具体要求。1.驱动力适中,不至于小车拐弯时速度过大倾翻,或重块晃动厉害影响行走。2.到达终点前重块竖直方向的速度要尽可能小,避免对小车过大的冲击。同时使重块的动能尽可能的转化到驱动小车前进上,如果重块竖直方向的速度较大,重块本身还有较多动能未释放,能量利用率不高。3.由于不同的场地对轮子的摩擦摩擦可能不一样,在不同的场地小车是需要的动力也不一样。在调试时也不知道多大的驱动力恰到好处。因此原动机构还需要能根据不同的需要调整其驱动力。4.机构简单,效率高。 基于以上分析我们提出了输出驱动力可调的绳轮式原动机构。我们可以通过改变绳子绕在绳轮上不同位置来改变其输出的动力 2.3传动机构 传动机构的功能是把动力和运动传递到转向机构和驱动轮上。要使小车行驶的更远及按设计的轨道精确地行驶,传动机构必需传递效率高、传动稳定、结构简单重量轻等。 1.不用其它额外的传动装置,直接由动力轴驱动轮子和转向机构,此种方式效率最高、结构最简单。在不考虑其它条件时这是最优的方式。 2.带轮具有结构简单、传动平稳、价格低廉、缓冲吸震等特点但其效率及传动精度并不高。不适合本小车设计。 3.齿轮具有效率高、结构紧凑、工作可靠、传动比稳定但价格较高。因此在第一种方式不能够满足要求的情况下优先考虑使用齿轮传动。 2.4转向机构 转向机构是本小车设计的关键部分,直接决定着小车的功能。转向机构也同样需要尽可能的减少摩擦耗能,结构简单,零部件已获得等基本条件,同时
四川省第三届无碳小车参赛总结 经过无碳小车的设计与制作,让我学到了很多很多,可谓是受益匪浅。从竞赛开 始到小车制作完成,再到小车顺利运行,期间经历了汗水、忙碌与挑战,我们不仅赢 得了成功,而且我们收获了失败后走向成功的经验。在小车的比赛中,更让我们这些 处在“大山”中的目光与眼界得以开阔,得以丰富。让我们看到自身的不足,让我们 明白人外有人,天外有天,更让我们学到我们所学不到的东西。 在这学期开学后的第三个星期,老师就为我们公布了无碳小车的设计制作大赛的 要求,同时要求我们进行自由组合,自行设计。我们的三人组合选择了相对简单的S 型小车,我们的设计理念为“简单、高效、灵活”。我们一开始借助了pore三维建模软件和机械设计、机械制图对小车进行了最初设计,根据计算和设定了数据,然后再pore进行分析,最后我们将图纸与方案整理了出来。在于指导老师的交流中,我们才 明白,我们的很多设计仅限于理论上,在实际的加工中是不能进行的,是加工不了的。在工艺和结构上,要有可行性,对于不能加工的方案就是不合格的方案,无论怎么优 秀也只是徒劳。 加工时一个漫长的过程,而就是这个漫长的过程,却是我们不断成长,不断进步,不断走向成熟的收获之路。在制作一开始,我们就要使用车床,钳工,虽然之前我们 也有过金工实习的课程,但是,却并没有这次的详细,同时对工件的精度要求也没有 这次的高。在车床的使用中,我们不仅对车床有了新的了解,更对车床的使用更加的 熟练,对刀、进刀、走刀、退刀以及刀具、工件的装夹等等都让我们得到进一步巩固。在钳工车间里,虽然都是纯手工工艺,很是辛苦,但正因如此,我们是专业知识成长 到了另一个高度,同时即锻炼了我们的团队合作能力,也锻炼了我们的动手操作能力。通过车间的加工,以及老师的指导,让我们明白,从一定程度上,加工精度,直接影 响到小车的性能好坏,同时也让我明白了动手加工能力对我们专业的重要性。 经过近两个月的加工,我们的小车也顺利完工了,感觉工作已经完成,而实际上,更大的困难才刚刚开始。我们接下来的工作就进入小车的调试阶段。最开始,我们加 上重物后,小车却一脸泰然的原地站立,这无疑给了我们巨大的打击,之后我们开始 寻找各个方面的原因,最终在齿轮啮合上找到了原因,而我们为了小车的方便考虑, 将小车的齿轮中心距改成可调式,轻松的解决了它。虽然调试过程中的问题看似简单,但是却是我们最致命的,如果它不能按照预定方案行走,那我们之前的一切努力都将 付诸东流。这也让我明白了,无论做什么事情,我们从头到尾都要保持严谨的心态对待,因为最细微的疏忽有可能成为我们走向成功的致命一击。