WIFI智能小车机器人
作者:师大学协和学院洋斌叶志燕渊
指导教师:钟伟雄林民庆
作品简介
在平常的生活中,我们经常会见到有人在玩遥控车,甚至现在还有了遥控飞机。这一切在过去那些年都还只是人们眼中孩子们的玩具而已,然而随着科技的发展,关于机器人的电影,或者是现实生活中科学研究者研发出来的仿生机器人经常在各种媒体中不断的报导。这毫无疑问,再过个几十年,机器人将走进我们的家庭中,它将为我们带来更多的便利。如今,很多电子发烧友DIY出了各种版本WIFI机器人。Wifi Robot,顾名思义就是通过wifi无线网控制的机器人,比起普通的遥控车,它的好处就是遥控信号覆盖围可以做到很广。
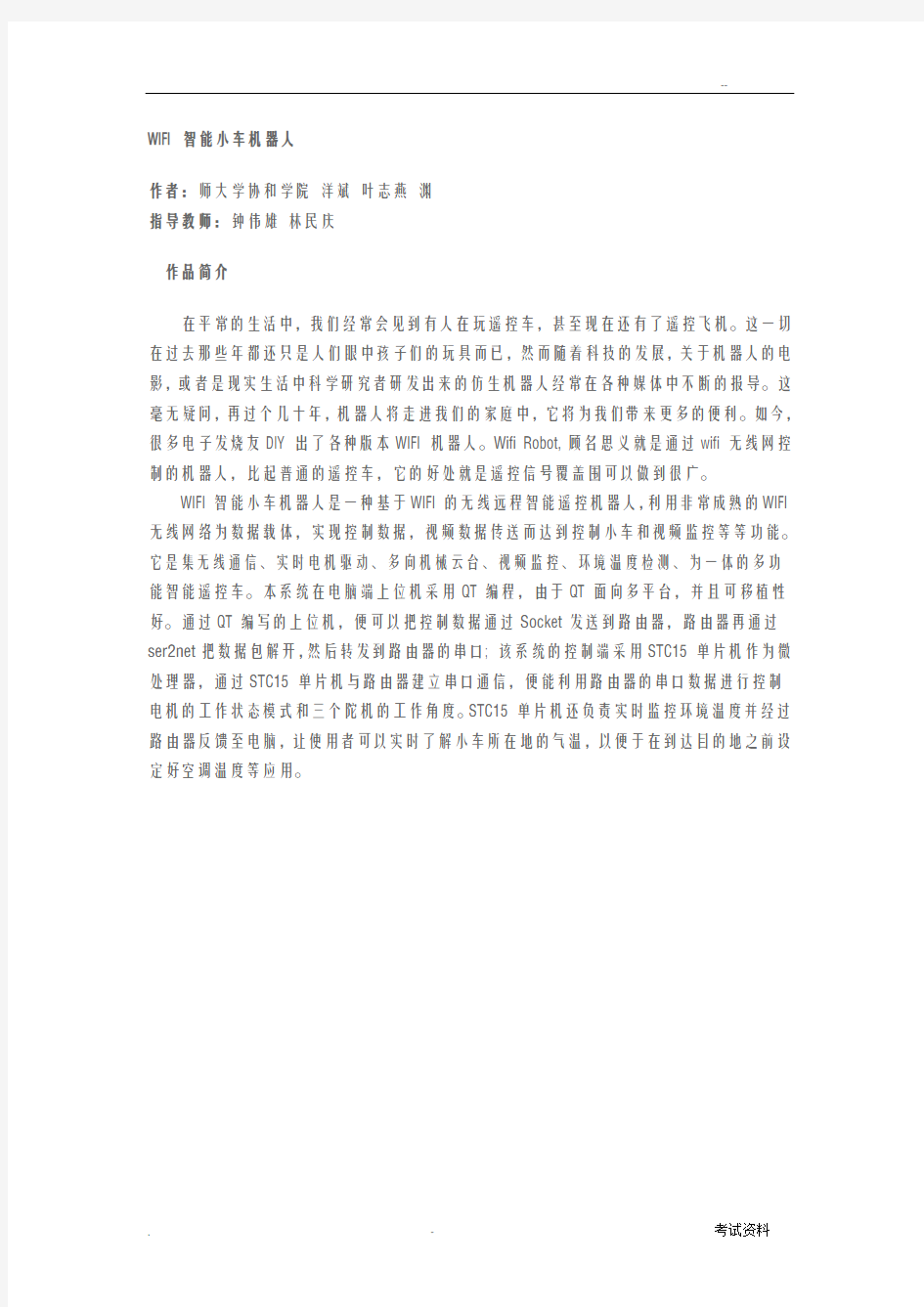
WIFI智能小车机器人是一种基于WIFI的无线远程智能遥控机器人,利用非常成熟的WIFI 无线网络为数据载体,实现控制数据,视频数据传送而达到控制小车和视频监控等等功能。它是集无线通信、实时电机驱动、多向机械云台、视频监控、环境温度检测、为一体的多功能智能遥控车。本系统在电脑端上位机采用QT编程,由于QT面向多平台,并且可移植性好。通过QT编写的上位机,便可以把控制数据通过Socket发送到路由器,路由器再通过ser2net把数据包解开,然后转发到路由器的串口; 该系统的控制端采用STC15单片机作为微处理器,通过STC15单片机与路由器建立串口通信,便能利用路由器的串口数据进行控制电机的工作状态模式和三个陀机的工作角度。STC15单片机还负责实时监控环境温度并经过路由器反馈至电脑,让使用者可以实时了解小车所在地的气温,以便于在到达目的地之前设定好空调温度等应用。
平台选型说明
本设计使用本届大赛指定的单片机开发板(以STC15F2K61S2芯片为控制核心) 设计说明
1、设计要求 1.找一台能刷Linux的无线路由器,将其操作系统刷成OpenWrt。
2.将Linux下的摄像头驱动安装到路由器上。
3.选择PC端的上位机软件,利用上位机的Socket把特定的数据包发送到路由端。
4.选择机器人车体,并制作控制驱动板和机械手臂等安装在车体上。
5.通过上位机操作,直接控制小车行走和机械手臂摆动,并能实时接收到机器人上的摄像头视频。
2、根据本系统的设计要求先确定了整体设计原理框图如图所示:
3、设计原理由图1 的原理框图,可知整个系统是电脑通过无线WIFI网络与路由
器通讯,当路由器收到命令后将相应命令通过串口发送给单片机,单片机再根据命令执行相应的操作,如机器人行走,操作机械手等;或者单片机通过读取温度传感器的温度值,通过串口传给路由器,路由器再将数据传给电脑。
3.1单片机最小系统
本系统的核心部分是单片机的控制,给以相应的编程命令,按照我们所要实现的功能意愿执行相应的操作,STC15F2K61S2的管脚图如图2所示:
3.1.1 STC15F2K61S2单片机的特性
1、超强抗干扰,超级加密;
2、不需要外部晶振和复位电路的单片机;
3、可省掉外部EEPROM,利用IAP技术;
4、ISP/IAP,在线编程,无需编程器/仿真器;
5、双串口,两个独立串口;
6、高速10位A/D转换器,8通道;
7、高速,可靠,1个时钟/机器周期8051
8、超低功耗,且抗干扰能力强。
3.2温度传感器模块
本模块主要作用是进行温度采集,然后经采集的数据送入单片机STC89C52RC里进行分析处理。在本次设计中采用了DS18B20作为数据采集器,它的精度最少可以精确到0.0625,完全可以用来进行环境温度的测量。由DS18B20 这一特点,非常适合于多点温度检测系统,硬件结构简单,方便联网,在仓储管理、工农业生产制造、气象观测、科学研究以及日常生活中被广泛应用[8]。
温度传感器如下:
3.3 路由器刷机
本系统需要给路由器刷OPENWRT系统。目前刷机大致有两种方法,一种是通过网线法进行刷机,另一种是通过TTL线进行刷机。一般采用网线法刷机比较简单,不需要什么工具。
3.3.1网线法刷机法
第一步:首先关闭路由器电源,网线连接电脑和路由器(DB120)的LAN4。
第二步:电脑IP设置为192.168.1.X/255.255.255.0(X为2-255之间的任意数字),网关不用设置。
第三步:用针状物按住路由器的RST键,然后打开路由器电源,等待大概10秒钟,路由器的电源灯会变成红色,此时可松开复位按键。
第四步:运行电脑端的cmd.exe,然后输入ping 192.168.1.1,测试是否能ping通。
第五步:打开电脑浏览器输入192.168.1.1,会出现一个页面,选择要刷的OpenWrt固件,点击确定开始刷机,大概两分钟后路由器会自动重启,至此说明路由器刷机完成。
3.3.2 TTL线刷机法
第一步:1.网线连接电脑和路由器(DB120)的LAN4,电脑IP设置为
192.168.1.X/255.255.255.0(X为2-255之间的任意数字),网关不用设置;
第二步:用USB-TTL线接好路由的GND、RXD、TXD三条线(VCC不要接)。
第三步:打开putty,选好端口号,端口号要查看电脑设备管理器,波特率设置成115200。
第四步:路由器通电,接线且设置正确的话,putty窗口应该出现路由器的信息。
第五步:在通电3秒,按下键盘的空格键,阻止路由器CFE启动,这时候应出现CFE>。
第六步:输入小写e a,e a之间有个空格键,回车,然后在按下y,回车,路由器会清除原来系统固件,类似电脑格式化全盘功能。
第七步:清空之后,路由会持续输出很多命令行,且不会停止,直接关掉路由电源。
第八步:重新打开路由电源,通电3秒按下空格键阻止CFE启动。
第九步:打开浏览器,输入192.168.1.1,按提示上传固件文件就可以了。
3.4 让路由器上网
刷完路由器后,接下来就要通过安装各种软件来扩展功能,而OpenWrt系统安装程序采用的是OPKG方式安装,也即在线安装,因此要保证路由器能连接上网络。因此需要做如下设置,能通过以下设置后路由器也可以当普通的路由器来使用。
浏览器输入:192.168.1.1 进入路由器。输入用户名:root ,密码:admin 进入路由器管理界面。然后点击‘快速向导’进行设置,一直点击下一步,直到出现-配置WAN口。首
先选择好接入协议的方式:
第一种:静态IP方式;
第二种:DHCP,即自动获取IP方式;
第三种:PPPOE拨号方式,即ADSL,目前家里用的基本以这个为主。
设置完成后,电脑如果能正常上网说明设置成功。
4.5 在路由器上安装程序
4.5.1路由器挂载摄像头
目前常用的USB摄像头分两种:有驱的和免驱的。在本系统中使用的是有驱的,主控芯片为中星微301,此摄像头挂载成功率100%,并且性价比高,特别适合本系统的设计。这里就以挂载ZL301摄像头为例来说明如何挂载摄像头。
1、挂载摄像头前首先要保证路由器能上网;
2、登陆路由WEB管理:系统——软件包——编辑软件包列表和安装对象——将
https://www.doczj.com/doc/6216154284.html,改成https://www.doczj.com/doc/6216154284.html,/xwrt
3、使用工具PUTTY登录路由器,输入以下命令。
rootOpenWrt:~# opkg update
rootOpenWrt:~# opkg install kmod-i2c-core
rootOpenWrt:~# opkg install kmod-video-core
rootOpenWrt:~# opkg install kmod-usb-video
rootOpenWrt:~# opkg remove kmod-usb-video
rootOpenWrt:~# opkg install kmod-usb-video
rootOpenWrt:~# opkg install kmod-video-gspca-core
rootOpenWrt:~# opkg install kmod-video-gspca-zc3xx
到此摄像头已经挂完,输入以下命令看看是否挂上。
rootOpenWrt:~# dmesg | grep usb
…
usb 2-1: USB disconnect, address 2
usb 2-1: new full speed USB device using bcm63xx_ohci and address 3
usb 2-1: configuration #1 chosen from 1 choice
usbcore: registered new interface driver zc3xx
看到最后一行,说明已经挂上。
4.5.2安装MJPEG
MJPEG作为一个小型的视频服务器软件,对系统消耗非常小,也很适合本系统设计。
1、安装MJPEG
使用如下命令安装:
Opkg install mjpg-strcamer
2、启动MJPEG
/etc/init.d/mjpg-streamer start
3、查看图像
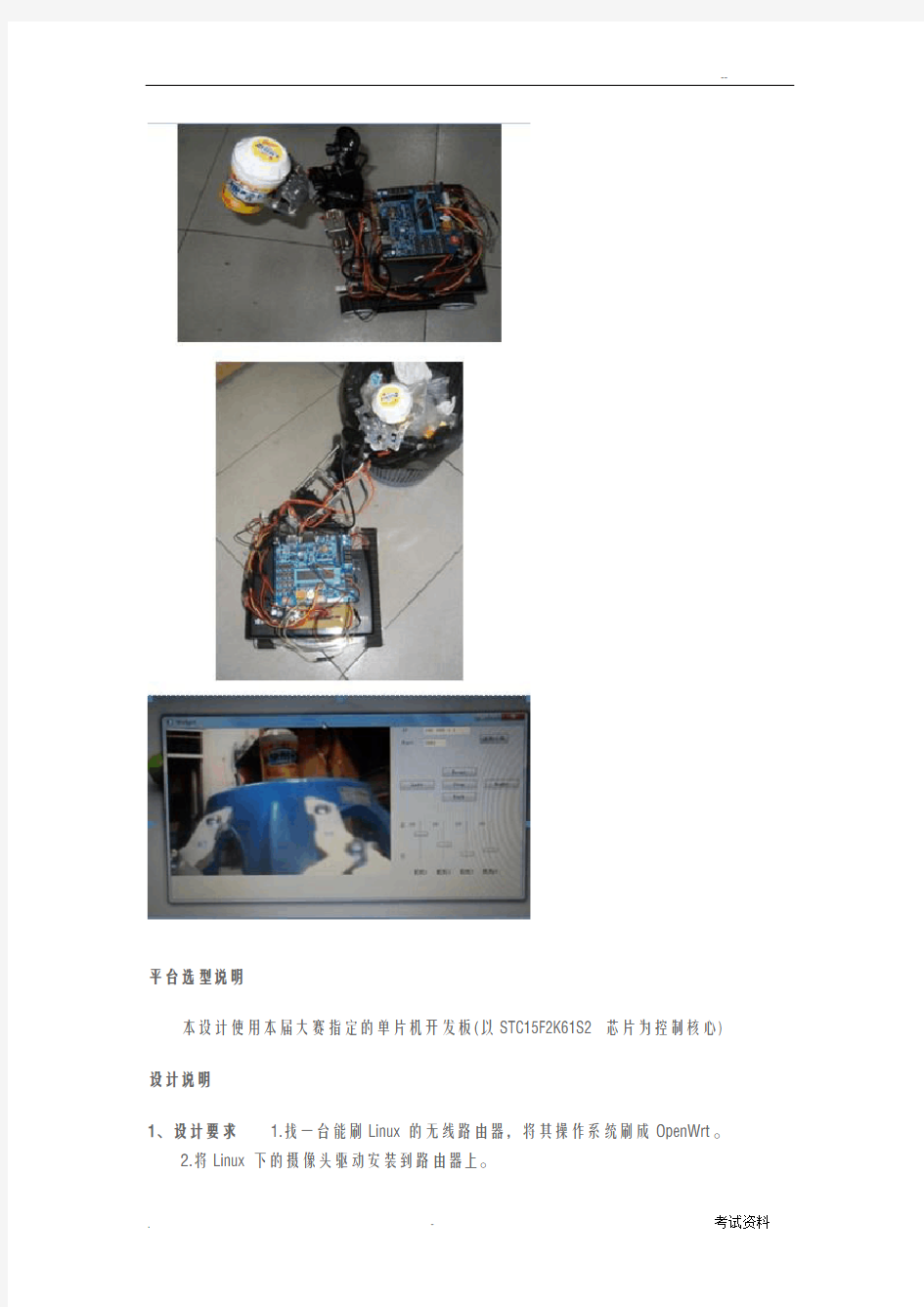
由于火狐浏览器支持动态刷新,因此需要下载安装火狐浏览器。在地址栏输入:192.168.1.1:8080/?action-stream 可查看到摄像头的动态视频。
4.6 PC端与机器人建立通讯
4.6.1单片机与路由器的通讯
单片机与路由器的通讯是通过串口进行的,这个原理与单片机与电脑的通讯是一样的。因此我们首先将路由器换成电脑,通过串口调试助手来发送命令。这里需要一个USB转串口的工具。
第一步:将USB转串口工具的驱动在电脑安装好。
第二步:将单片机的串口与USB转串口工具连接好,只需连接三根线即可(RX、TX、GND)。
第三步:打开串口调试助手,设置好串口配置,一般有端口、波特率、数据位、停止位等。
毕业设计方案 课题名称:《基于51单片机的WIFI 遥控小车设计》
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
由于今年组委会光电管和摄像头分开比赛。所以传感器部分我们选择了光电管,比赛以小车的速度记成绩,为了让小车更快更稳得跑完全程,传感器的探测距离必须要远,既要有大的前瞻,普通的红外对管由于功率较小,探测距离增大时,干扰严重,所以我们自制了大功率对管,同时采用了程序控制脉冲发光的办法,有效的降低了发热,提高了系统的稳定性。 系统采用采用了7.2V 2000mAh Ni-Cd蓄电池作为系统能源,并且通过稳压电路分出6伏,5伏已分别给舵机和单片机供电。 直流电机驱动模块接收速度控制信号控制驱动电机运行,达到控制车速目的。转向伺服模块控制舵机转向,进而控制智能车转弯。速度测量模块实时测量智能车车速,用于系统的车速闭环控制,以精确控制车速。 系统充分使用了MC9S12DG128单片机的外围模块,具体使用到的模块包括:ADC模拟数字转换模块、定时器模块、PWM脉冲宽度调制模块、中断模块、I/O 端口和实时时钟模块等。 系统调试过程中,使用了组委会提供的代码调试环境CodeWarrior IDE,同时使用了清华的软件进行了仿真试验。 图1.1 系统结构框图 3.1舵机部分 为了使转弯更加灵活,对舵机相关部分作了部分改动。首先,我们将舵机力臂加长85mm。这样,对于同样的转弯角度值,只需更小的舵机转角,减小了舵机转弯时惯性带来的弊端。其次,我们将舵机反装,使舵机连杆水平,因为此时舵机提供的力全部用在转弯上。 3.2前轮部分 为了增加前轮转弯时的稳定性,对前轮相关部分进行了部分改动。首先,更改前后垫片
的数量,使前轮主销后倾,这样,车轮具有更好的自动回正功能。其次,更改连杆的长度,使车轮外倾,车轮转弯时,前半部分重心上移,促使赛车转弯更加稳定。再次,我们通过更改舵机连杆的长度,增加前轮前束,同样增加了前轮的稳定性。 3.3底盘部分 为了提高赛车运行时的稳定性,对地盘相关部分作了部分改动。首先,前轮相关位置加垫片,降低了前轮重心。其次,更改后轮车轴处的调节块,使后轮重心升高,这样,车身前倾,一定程度上,增加了车的稳定性。 3.4后轮部分 首先,更换后轮轮距调节块,使后轮两轮之间间距加大。这样,车在转弯时不容易产生侧滑。其次,调节后轮差速,使赛车转弯更加灵活。 4.1电源部分 为了能使智能车系统能正常工作,就需要对电池电压调节。其中,单片机系统、车速传感器电路需要5V 电压,路径识别的光电传感器和接收器电路电压工作为5V 、伺服电机工作电压范围4.8V 到6V(或直接由电池提供),直流电机可以使用7.2V 2000mAh Ni-cd 蓄电池直接供电。考虑到由于驱动电机引起的电压瞬间下降的现象,因此采用低压降的三端稳压器成为必然。我们在采用lm7805,和lm7806作为稳牙芯片。经试验电压纹波小,完全可以满足要求。 电池(7.2v ) 2000mAh Ni-cd 稳压电路 电机 图4.1系统电压调节图 5V 对管 单片机 舵机 测速板 6V 7.2V
呼伦贝尔学院 计算机科学与技术学院 本科生毕业论文(设计) 题目:基于Arduino控制的 WIFI智能小车 学生姓名:苑伟 学号: 专业班级:2011级计算机科学与技术一班 指导教师:陶锐 完成时间: 2015年5月22日
目录
摘要 本次设计wifi智能小车主要采用Arduino作为底层硬件控制核心,接收来自路由器的指令执行相关操作;采用PWM脉冲调节小车速度、舵机控制以及灯光亮度;采用定时器实现小车数据的发送、小车的避障及计算小车的行驶速度;运用简单的PID算法实现轮胎直接的差速控制;采用路由器发射无线wifi,使用Lua脚本实现了接收单片机数据及发送操作指令,设计了web页面控制小车的B/S模式结构。 关键字:Arduino;PWM脉冲;PID算法;web控制
Abstract The design of wi-fi smart cars mainly adopts the Arduino as the control core to receive instructions from the router perform related operations; Using PWM pulse to adjust the vehicle speed, steering gear control and lighting brightness; using timer to realise the transmission of car data ,the breakdown of the car and calculate the car speeds; Using the simple PID algorithm tyre direct differential control; Using wireless wifi router launch, using the Lua script implements receiving MCU data and send operation instructions,and at last, it designs a web page to control the car B/S mode structure. Keyword: Arduino; PWM Pulse; PID arithmetic; Web manage
WIFI智能小车机器人 作者:福建师范大学协和学院陈洋斌叶志燕沈渊 指导教师:钟伟雄林民庆 作品简介 在平常的生活中,我们经常会见到有人在玩遥控车,甚至现在还有了遥控飞机。这一切在过去那些年都还只是人们眼中孩子们的玩具而已,然而随着科技的发展,关于机器人的电影,或者是现实生活中科学研究者研发出来的仿生机器人经常在各种媒体中不断的报导。这毫无疑问,再过个几十年,机器人将走进我们的家庭中,它将为我们带来更多的便利。如今,很多电子发烧友DIY出了各种版本WIFI机器人。Wifi Robot,顾名思义就是通过wifi无线网控制的机器人,比起普通的遥控车,它的好处就是遥控信号覆盖范围可以做到很广。 WIFI智能小车机器人是一种基于WIFI的无线远程智能遥控机器人,利用非常成熟的WIFI无线网络为数据载体,实现控制数据,视频数据传送而达到控制小车和视频监控等等功能。它是集无线通信、实时电机驱动、多向机械云台、视频监控、环境温度检测、为一体的多功能智能遥控车。本系统在电脑端上位机采用QT编程,由于QT面向多平台,并且可移植性好。通过QT编写的上位机,便可以把控制数据通过Socket发送到路由器,路由器再通过ser2net把数据包解开,然后转发到路由器的串口; 该系统的控制端采用STC15单片机作为微处理器,通过STC15单片机与路由器建立串口通信,便能利用路由器的串口数据进行控制电机的工作状态模式和三个陀机的工作角度。STC15单片机还负责实时监控环境温度并经过路由器反馈至电脑,让使用者可以实时了解小车所在地的气温,以便于在到达目的地之前设定好空调温度等应用。
平台选型说明 本设计使用本届大赛指定的单片机开发板(以STC15F2K61S2芯片为控制核心) 设计说明 1、设计要求 1.找一台能刷Linux的无线路由器,将其操作系统刷成OpenWrt。
基于单片机的WIFI智能小车设计 摘要 WIFI智能小车由电机、小车车体、89C52控制芯片、WIFI收发模块、电机驱动、舵机、电源、摄像头等主要部件以及灯光、蜂鸣器、电平转换等辅助模块构成。WIFI智能小车利用笔记本或手机等能连接无线路由器的终端智能设备连接到路由器,通过应用软件显示路由器上摄像头上采集到的视频信号,再通过这些智能的终端设备发送控制指令到无线路由器,通过无线路由器将指令传送给单片机进行处理。然后通过单片机控制电机驱动驱动电机转动、舵机转动,从而实现控制小车的运动及视频采集。 关键词:路由器;wifi;智能小车;89C52
Abstract The intelligent WIFI car involved a motor, a body, the 89C52 control chip, a WIFI transfer module, motor drivers, a power supply, lights, a buzzer and a voltage converter. The intelligent WIFI car can use an intelligent terminal (such as a laptop or a mobile phone) to connect with the router and use application software to display the video signal collected by the camera, then the intelligent terminal will send control commands which can be processed by the MCU though the routers. The MCU will control the turning of motors and realize the moving of the car and the video collection. Keywords:Router;WIFI;intelligent car;89C52
多功能操作WIFI智能小车技术方案 作者:宜宾职业技术学院谭进胡文钰邹顺 指导老师:彭永杰陈挺 作品简介: 开发背景: 所谓的wifi智能小车就是可以通过WIFI网络控制的视频传输可移动甚至可以安装其他机械手各类传感器实现数据互动的小车,对于那些不安全的以及人无法进入的场所进行无线监测,wifi小车监控是一个很好的解决方案,能够很好的进行监控控制。现在无线wifi功能的设备随处可见,本设计利用现有的网络资源搭建一台wifi视频监控小车,即利用带有wifi 的设备进行控制小车,实现无线监控。 结构说明: 本次设计的主要组成部分是由IAP15F2K61S2单片机、路由器703N、S605摄像头、NRF905无线发送接收模块、小车模型、TPC7062KD组态触摸屏、串口通信模块构成。其系统结构方框图如下图1所示。
一、路由器部分 本次设计采用703N路由器,此路由器采用主芯片AR9331,集成了无线网卡有线网卡CPU等全部功能,是最小尺寸的wifi路由器模块,采用703N路由器可以很好的实现wifi传输,达到设计的要求。 二、无线发送接收部分 本次设计采用NRF905无线模块,NRF905无线芯片是挪威NORDIC公司出品的低于 1GHz无线传输芯片,主要工作于433MHz、868MHz和915MHz的ISM频段。芯片内置电源管理、频率合成器、功率放大器、晶体振荡器和调制器等功能模块,输出功率和通信频道可通过程序进行配置。此模块适合 于低功耗、低成本的系统设计,本设计采用两块发收模块,可以更好的进行通信。
三、主控芯片部分 本次设计采用STC公司的IAP15F2K61S2为主控芯片,主要功能是:摄像头将录制到的画面传送到703N路由器上,703N路由器将摄像头采集到的视频通过wifi发送给PC机,PC 机接收到视频信号后,将采集到的画面在PC机上显示出来。在PC平台上通过wifi发出相应的数据给路由器,路由器将数据再转发给IAP15F2K61S2单片机,由单片机去操作系统的运行。TPC7062KD组态触摸屏将实时的数据传送给IAP15F2K61S2单片机,单片机将接收到的信号转发给NRF905无线发送模块,由无线接收模块接收相应的数据,再传送给单片机,来控制相应系统的运行。 四、触摸屏控制部分 TPC7062KD,是一套以嵌入式低功耗CPU为核心(主频400MHz)的高性能嵌入式一体化触摸屏。用这种触摸屏作为LCD显示,其效果明显,能实现触摸键盘等多种功能,操作简单,实现了良好的人机界面。如表1所示为触摸屏RS232C通讯方式操作方式,可根据这种操作方式对触摸屏进行操作。 表1 触摸屏通信接口说明 9针串口(DB9) 针号缩写编写功能说明 2RXD接受数据 3TXD发送数据 5GND信号地产品功能: 本系统能够实现三种功能,分别为PC操控小车运行、手机操控小车、触摸屏操控小车运行。 703N路由器将视频信号发送给PC(或手机)机,PC(或手机)机接收到wifi信号后,将视频图像显示出来,通过PC机(或手机)上位机软件远程控制小车运行,控制端IAP15F2K61S2单片机作为微处理器,通过与路由器建立串口通信,便能利用路由器的串口数据进行控制电机的工作状态模式和陀机的工作。IAP15F2K61S2单片机还负责与触摸屏通过无线通信远程控制小车运行。 产品实物图:
WIFI智能小车机器人 作者:师大学协和学院洋斌叶志燕渊 指导教师:钟伟雄林民庆 作品简介 在平常的生活中,我们经常会见到有人在玩遥控车,甚至现在还有了遥控飞机。这一切在过去那些年都还只是人们眼中孩子们的玩具而已,然而随着科技的发展,关于机器人的电影,或者是现实生活中科学研究者研发出来的仿生机器人经常在各种媒体中不断的报导。这毫无疑问,再过个几十年,机器人将走进我们的家庭中,它将为我们带来更多的便利。如今,很多电子发烧友DIY出了各种版本WIFI机器人。Wifi Robot,顾名思义就是通过wifi无线网控制的机器人,比起普通的遥控车,它的好处就是遥控信号覆盖围可以做到很广。 WIFI智能小车机器人是一种基于WIFI的无线远程智能遥控机器人,利用非常成熟的WIFI 无线网络为数据载体,实现控制数据,视频数据传送而达到控制小车和视频监控等等功能。它是集无线通信、实时电机驱动、多向机械云台、视频监控、环境温度检测、为一体的多功能智能遥控车。本系统在电脑端上位机采用QT编程,由于QT面向多平台,并且可移植性好。通过QT编写的上位机,便可以把控制数据通过Socket发送到路由器,路由器再通过ser2net把数据包解开,然后转发到路由器的串口; 该系统的控制端采用STC15单片机作为微处理器,通过STC15单片机与路由器建立串口通信,便能利用路由器的串口数据进行控制电机的工作状态模式和三个陀机的工作角度。STC15单片机还负责实时监控环境温度并经过路由器反馈至电脑,让使用者可以实时了解小车所在地的气温,以便于在到达目的地之前设定好空调温度等应用。
平台选型说明 本设计使用本届大赛指定的单片机开发板(以STC15F2K61S2芯片为控制核心) 设计说明 1、设计要求 1.找一台能刷Linux的无线路由器,将其操作系统刷成OpenWrt。 2.将Linux下的摄像头驱动安装到路由器上。
随着生活智能化的不断发展,智能家居将是未来发展的必然趋势。对于无人值守的地方、隐蔽场所以及黑暗处的监测也成为必须解决的问题。而现在嵌入wifi功能的设备随处可见,所以利用现有的网络资源搭建一台wifi视频监控小车的想法就诞生了,即利用带有wifi的设备进行控制小车,实现无线监控。对于那些不安全的以及人无法进入的场所进行无线监测,通过wifi小车是一个很好的解决方案,利用现有的PC终端就可以进行监控控制。 本系统主要由无线监测终端和PC上位机两部分组成。无线终端的小车车体是自己利用铝材设计组装完成的。小车前端的摄像头对周围的环境进行监测,同时把视频信号传回给P C上位机。通过PC上位机可以随时控制小车行进方向,而且可以操作摄像头随意上下、左右转动,扩大小车拍摄视野。另外在小车上加装了超声波雷达装置,可以360度旋转对小车周围的障碍物进行探测,同时上位机上实时显示出检测到的数据。 使用说明:使用时打开小车电源开关,等待约30秒的时间路由器正常启动,然后打开PC端无线信号开关搜索到名称为“wifi—robot”的无线信号,输入密码:hngc点击连接。连接上以后打开wifi视频小车操作平台通过界面上的按钮就可打开视频并对小车进行操控。同时可以通过PC机键盘上的Q、W、A、S、D键控制小车行走,I、J、K、L、O键控制小车上摄像头转动方向。 平台选型说明 单片机开发板(以STC15F2K61S2芯片为控制核心) 设计说明 对小车进行整体分析,基本功能是对小车周围进行视频监控,并且通过超声波探测周围的障碍物距离。上位机可以实时显示小车传回监控的画面和超声波探测的数据,同时上位机
WiFi智能控制视频智能小车 单片机原理与接口技术 项目学习报告 小组成员: 组长: 专业:机械工程 指导教师: 作品名称:WiFi智能控制视频智能小车时间:2017年5月
目录 1.设计方案. (1) 1.1 系统需求分析 (1) 1.2 系统功能描述 (1) 1.3 系统结构组成 (1) 2.系统设计 (1) 2.1 硬件系统设计 (1) 2.2 软件系统设计 (3) 3.系统仿真与调试 (7) 3.1系统仿真 (7) 3.2系统调试 (9) 4.技术经济性分析 (10) 5.设计总结 (10) 参考文献 (11) 附件 (11)
1.设计方案 根据《湄公河行动》和《雪域雄鹰》里的黑科技,军事里面用过的遥控视频摄像小车,我们在网上查过相应的制作信息,由此我们小组打算用单片机制作一个类似 的机器人。 本设计是以51单片机为核心,以通过手机APP上的按钮上位 机来控制小车前进、后退、右转、左转、停止等功能。通过单片 机控制电机驱动进而来控制电机的正反转以实现小车的前进、后 退、右转、左转、停止。本设计采用WiFi模块进行数据通信, 手机端通过连接小车上的WiFi进行控制,通过小车上的wifi模 块接收从手机端发送过来的动作指令,把接收到的指令再传递给 单片机,单片机通过分析处理传递过来的指令不同,而运行不同 的子程序来控制电机驱动,进而实现小车的前进、后退、左转、右转、图1 湄公河行动 停止等不同的动作。 小组成员技术分工: :视频制作,机械结构设计,小车组装。 :51单片机程序设计调试和电路连接,word制作。 :ppt制作,小车组装。 :ug三维造型装配,小车组装。 小组四人共同讨论确定设计方案——蓝牙智能控制可夹持视频智能小车 1.1 系统需求分析 对于现在身边所发生的事情人们是未知的,有些事情是不能直接去做的,所以需要借助一些设备才帮助人们规避风险,采集资料。本项目所做得WiFi视频小车就帮助我们解决了这个问题 1.2 系统功能描述 手机端连接小车WiFi后,可以通过手机上的虚拟按钮来控制小车的行走,小车上的摄像头将小车前的环境通过WiFi传送到手机上。所以视频小车可以用来探索未知环境,并将未知环境的情况实时的显示在控制端上面。 1.3 系统结构组成 STC12C5A60S2集成式芯片;led灯模块;蜂鸣器模块;舵机;驱动电机(直流);小车轮胎;蓝牙模块;WiFi模块;摄像头;机械零件。 2.系统设计 2.1 硬件系统设计 (1)器件选型设计:集成于51单片机、4位数码管、蜂鸣器、舵机扩展、led灯、电机驱动等位一体
实用文档 南京理工大学 毕业设计(论文)开题报告 学生姓名:明杰学号:8 专业:电子工程 设计(论文)题目:基于单片机的wifi智能小车 指导教 师:谭伟东
2014年03月13日
毕业设计(论文)开题报告 1.结合毕业设计(论文)课题情况,根据所查阅的文献资料,每人撰写2000字左右的文献综述: 文献综述 1.课题研究的背景 现在是一个智能化的时代,许多机器设备或电子仪器都在逐步实现自动化和智能化,各种智能化设备正在逐步替代人为的操作,方便我们的工作、生活。智能化设备可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于军事领域、科学勘探、和人民生活等方面。目前,在企业生产技术不断提高、对自动化技术要求不断加深的环境下,智能车辆以及在智能车辆基础上开发出来的产品已成为自动化物流运输、柔性生产组织等系统的关键设备。世界上许多国家都在积极进行智能车辆的研究和开发设计。 智能车辆也叫无人车辆,是一个集环境感知、规划决策和多等级辅助驾驶等功能于一体的综合系统。智能车辆的主要特点是在复杂的道路情况下,能自动地操纵和驾驶车辆绕开障碍物并沿着预定的道路(轨迹)行进。智能小车也是智能车辆的一个研究方向,它集中地运用了计算机、传感、信息、通信、导航及自动控制等技术,是典型的高新技术综合体。它具有道路障碍自动识别、自动报警、自动制动、自动保持安全距离、车速和巡航控等功能。它可以分为三大组成部分:传感器检测部分、执行部分、CPU。可以实现自动避障功能,还可以扩展循迹等功能,感知导引线和障碍物。可以实现小车自动识别路线,选择正确的行进路线,并检测到障碍物自动躲避。如果加装无线路由器并实现和计算机实时通信,就可以通过电脑、手机引导WIFI智能小车行驶,实现实时显示时间、速度、里程,具有自动寻迹、寻光、避障功能,可程控行驶速度、准确定位停车等运动状态进行实时控制。 智能小车的主要应用领域包括以下几个方面: a.军事侦察与环境探测:现代战争对军事侦察提出了更高的要求,世界各国普遍重视对军侦察的建设,采取各种有效措施预防敌方的突然袭击,并广泛应用先进科学技术,不断研制多用途的侦察器材和探测设备,在车上装备摄像机、安全激光测距仪、夜视装
#include
企业实践报告( 2016-- 2017年度第1学期) 基于51单片机的WIFI遥控小车设计 专业 学生** 班级* 学号*** 指导教师 完成日期2016.12.*
目录 第1章绪论 (2) 第2章方案论证及选择 (2) 2.1 系统方案选择 (2) 2.2 总体设计方案 (2) 2.2.1 整机系统 (2) 2.1.2 整机工作原理 (2) 第3章硬件系统设计 (2) 3.1 路由器 (2) 3.2 ESP8266WIFI模块 (2) 3.2.1 ESP8266WIFI模块引脚功能 (2) 3.3 STC89C52RC单片机 (2) 3.3.1 STC89C52RC单片机引脚功能 (2) 3.3.2 单片机的外围电路 (2) 3.4 L293D电机驱动模块 (2) 3.4.1 L293D引脚功能及原理图 (2) 3.5 3.3V降/稳压模块 (2) 3.5.1 降/稳压模块的原理图 (2) 3.6 5V和3.3V串口电平转换模块 (2) 3.6.1 引脚功能和原理图 (2) 第4章软件系统设计 (2) 4.1 软件开发环境 (2) 4.1.1 Android的APP软件的开发 (2) 4.1.2 单片机程序开发环境Keil (2) 4.2 程序流程图 (2) 4.2.1 主程序流程图 (2) 4.2.2 串口中断接收流程图 (2) 4.2.3 串口发送指令流程图 (2) 第5章设备调试 (2) 5.1 系统调试 (2) 5.2 硬件设备调试 (2) 5.2.1 ESP8266串口WIFI的连线 (2) 5.2.2 STC89C52RC单片机连线 (2) 5.2.3 单片机和WIFI模块的连线 (2) 5.3 软件调试 (2) 5.3.1 WIFI模块的调试 (2) 5.3.2 单片机的调试 (2) 5.3.3 单片机和WIFI模块的调试 (2) 心得体会 (2)
基于Arduino开源平台的wifi视频监控小车这个创意是个舶来品。记得有个国外作者做了一个基于Arduino和wifi路由器的智能机器人。 要求有摄像头,能够拍摄小车经过地方的影像。 要求使用Arduino模块实现控制。 要求使用PC通过路由器控制小车。 实现这样的机器人很难吗?能不能做一个简化版的? 组件列表 A4WD小车;ROMEO控制板;5节2300MAH电池;12V电池包;充电器;上海贝尔 RG-100A路由器;中星微301摄像头 ;两自由度DF15MG云台。 图1 基于Arduino开源平台的WiFi视频监控小车
图2 Arduino_romeo主控板 图3 小车 图4 云台和摄像头
图5 摄像头 源代码- 基于Arduino开源平台的wifi视频监控小车2012年06月25日12:04 来源:互联网作者:秩名我要评论(0) 源代码 下面放出ROMEO板的源程序将这个程序使用Arduino 0022 下载进去: #include //舵机控制库 //电机控制端口设置 #define EN1 5//控制左侧电机速度 #define EN2 6//控制右侧电机速度 #define IN1 4//控制左侧电机方向 #define IN2 7//控制右侧电机方向 #define FORW 0//前进 #define BACK 1//后退 #define dataLenMax 16 //设置最大数据帧长度不大于16 Servo servoX; //云台X轴舵机左右 Servo servoY; //云台Y轴舵机上下 //控制电机转动子函数 void Motor_Control(int M1_DIR,int M1_EN,int M2_DIR,int M2_EN)
河南理工大学 毕业设计(论文)任务书 专业班级学生姓名 一、题目 二、起止日期年月日至年月日 三、主要任务与要求 指导教师职称 学院领导签字(盖章) 年月日
河南理工大学 毕业设计(论文)评阅人评语 题目 评阅人职称 工作单位 年月日
河南理工大学 毕业设计(论文)评定书 题目 指导教师职称 年月日
河南理工大学 毕业设计(论文)答辩许可证 答辩前向毕业设计答辩委员会(小组)提交了如下资料: 1、设计(论文)说明共页 2、图纸共张 3、指导教师意见共页 4、评阅人意见共页 经审查,专业班同学所提交的毕业设计(论文),符合学校本科生毕业设计(论文)的相关规定,达到毕业设计(论文)任务书的要求,根据学校教学管理的有关规定,同意参加毕业设计(论文)答辩。 指导教师签字(盖章) 年月日根据审查,准予参加答辩。 答辩委员会主席(组长)签字(盖章) 年月日
河南理工大学 毕业设计(论文)答辩委员会(小组)决议 学院专业班同学的毕业设计(论文)于年月日进行了答辩。 根据学生所提供的毕业设计(论文)材料、指导教师和评阅人意见以及在答辩过程中学生回答问题的情况,毕业设计(论文)答辩委员会(小组)做出如下决议。 一、毕业设计(论文)的总评语 二、毕业设计(论文)的总评成绩: 三、答辩组组长签名: 答辩组成员签名: 答辩委员会主席:签字(盖章) 年月日
摘要 Wifi全称wireless fidelity,是当今使用最广的一种无线网络传输技术。Wifi 信号以其强大的覆盖范围和更高的传输速率得到广泛应用。本设计中研究了wifi控制技术在遥控小车中的应用。该遥控小车以wifi信号为数据传输载体,同时通过摄像头反馈视频画面,实现实时监控、实时控制的功能。基于wifi信号的上网功能应用在我们生活中已经非常广泛,然而基于其在控制方面的应用并不多,本设计就是尝试采用这一并不广泛应用的技术,以希望在这方面能有新的突破。在整个设计系统中,wifi信号的应用是主线,小车是载体,手机作为上位机发出控制指令,通过wifi模块转化发送给单片机,控制小车做出相关动作。 关键词:wifi信号单片机控制视频传输