3.稳态信号检测的数字信号处理方法
3.1引言
数字信号处理方法被广泛用于稳态信号的检测,而在电力系统中稳态信号的分析主要是针对电网谐波。电网谐波可分为整次谐波、间谐波和分次谐波。针对电网谐波有不同的谐波分析算法。目前对于稳态信号检测的数字信号处理的方法主要有Fourier 变换(DFT,FFT),经典谱分析,基于加窗和频谱校正的谐波分析,现代谱分析等。
3.2 Fourier 变换
3.2.1 简介
离散傅里叶变换(DFT)是为适应计算机傅里叶变换而引出的。对信号x(t)进行傅里叶变换或逆傅里叶变换运算时,无论在时域或在频域都需要进行包括(-∞,+∞)区间的积分运算,而若在计算机上实现这一运算,则必须做到把连续信号改造为离散数据,把计算范围收缩到一个有限区间。DFT 在信号的分析处理中起着非常重要的作用,因为DFT 能将信号的时域特性变换为频域特性,时域和频域特性的相互转换不仅在理论和形式上非常方便,而且其数值实现已有FFT 算法和软件可供使用.
3.2.2 DFT 变换
一个连续的周期函数)(t x p 可以表示成指数形式的傅里叶级数,即
(3-1)
其中傅里叶级数的复系数是 ?+-=1001)(1
1T t t kt j p K dt e t x T X ω (3-2)
从这两式出发推导出周期序列的离散傅里叶级数(DFS)如下:
???
????==∑∑-=--=nk N j p N k p p nk N j p N n e k X N n x k X e n x ππ21021
0)(1)()()( (3-3) 在DFS 变换对的表达式(3-3)中,由于)(n x p 和)(k X p 都是以N 为周期的,在求出它们的0到N-1个点的数值后,只要以其主值区间序列进行周期延拓即可求出其余各点数值,因此在实际计算DFS 时,只要计算出0到N-1点即可。如果把有限长序列看作是周期序列的主值区间序列,那么利用DFS 计算周期序列的一个周期也就是算出了有限长序列。为此引用变换对。
∑+∞-∞==
k kt j k p e X t x 1)(ω
???
????-≤≤==-≤≤==∑∑-=-=-10210210)(1)]([)(10)()]([)(N k nk N j N n nk N j N n e k X N k X IDFT n x N k e n x n x DFT k X ππ (3-4) 这就是离散傅里叶变换(DFT),它描述有限长时间序列与其频谱的关系,它表明,时域中有限长离散序列的频谱是离散的和有限带宽的。DFT 和DFS 除定义中n 和k 的取值范围不同外,形式上是完全相同的,因此,如果把DFT 的有限长序列x(n)及其相应的有限带宽频谱X(k)分别作为主值区间序列进行周期延拓,则所得的计算结果与DFS 完全相同。
Fourier 分析虽然可以用来对信号作时频分析,然而它没有任何时频局部化的能力。事实上,若要得到某个固定频率ω处的频谱信息)(ω∧
f ,必须利用全部的时域信息f(t),R t ∈;而若仅仅已知局部的频谱信息,却不能由此获得信号在局部时域中的特性。同样,信号在局部时域上的改变会影响它在全部时域中的特性。 然而,在很多实际问题中,人们特别关心的是局部时域信号在局部频域中的对应特性,例如在电力系统故障信号分析中,人们关注的是故障电流(电压)的突发时刻及在随后的极短时段内对应的频谱特征,希望能及时判断出故障和扰动发生的时刻和类型。对于这样的突变信号的时频分析,Fourier 分析是无能为力的,人们需要短时的时频局部化分析方法。
3.2.3基于DFT 的谱估计与谐波分析
取样信号)(n x 的离散傅里叶变换为: ∑-=-=102)()(N n nk N j e
n x k X π (3-5)
得到了信号的离散傅里叶变换之后就可以对信号进行频谱分析了,变换后的每一个值都对应信号时域中的一个频率为基波整数倍的正弦分量。其中需要注意的两个问题就是分析的最高频率和频率的分辨率:离散傅里叶变换的分析频率为采样频率的二分之一,当需要分析更高的频率时必须提高采样频率。DFT 算法的频率分辨率是指在频率轴上的所能得到的最小频率间隔f ?。从离散傅里叶变换的定义可以得到频谱的最小间隔为:
N f f s /=? 其中s f 为信号的采样频率
f ? 越小,当然对)(ωj e X 分辨得越好。该式反映了频谱的分辨能力的f ?都反比于信号的长度N 。
由于 T NT N f f s s /1/1/===?
所以,严格的说f ?反比于信号的实际长度T 。
3.3 基于经典谱估计的谐波分析
3.3.1 基于相关函数法的谱估计和谐波分析
自然界中的各种噪声一般都是典型的随机信号,一旦这些随机的噪声信号混入我们需要分析的对象时,它们也变成了随机信号,这时继续把它们作为确定性信号分析就不可避免的出现误差,有时候甚至导致完全错误的答案。一般来说,电力系统中的各种噪声可以认为是随机性最强的白噪声,但是白噪声的傅氏变换在严格意义上是不存在的,各种统计特性就成为了描述随机信号的主要方法。白噪声)(t x 的统计特性可表示为下式:
0))((=t x E
???≠===+0
,00,)(),(2ττσττx x R t t R (3-6) 其中))((t x E 为)(t x 的数学期望, ),(τ+t t R x 为相关函数,τ为时间延迟,2σ为其方差。白噪声离散采样序列的n x 的自相关函数为:
0)()()()(===++k n n k n n xx x E x E x x E k R 当0≠k 时
设p 个正弦信号组合为:
∑=+=p
k k k n q x 1)cos(θω (3-7)
在这种情况下,自相关函数为:
∑=-=-=q
k k xx xx i l q i l r i l r 12
)(cos 2)(),(ω (3-8)
从上式可见经过自相关变换之后正弦信号的频率信息被保留下来,丢失了相位信息,所以基于自相关变换的频谱分析只能用来定位信号中的正弦分量的频率,由于白噪声本身和任何正弦信号都是不相关的,这样白噪声中正弦信号组合的自相关函数为:
)()(cos 2)(),(12
k i l q i l r i l r q
k k xx xx ρσω+-=-=∑= (3-9)
其中ρ为白噪声的方差。这样经过自相关变换后白噪声的影响将集中在0=k 时刻。
基于相关函数法的谱估计就是通过统计分析,从时域上先求信号的自相关函数,在作Fourier 变换,求得功率谱估计值。
?+∞
∞--=ττωωτd e R S j x x )()( (3-10)
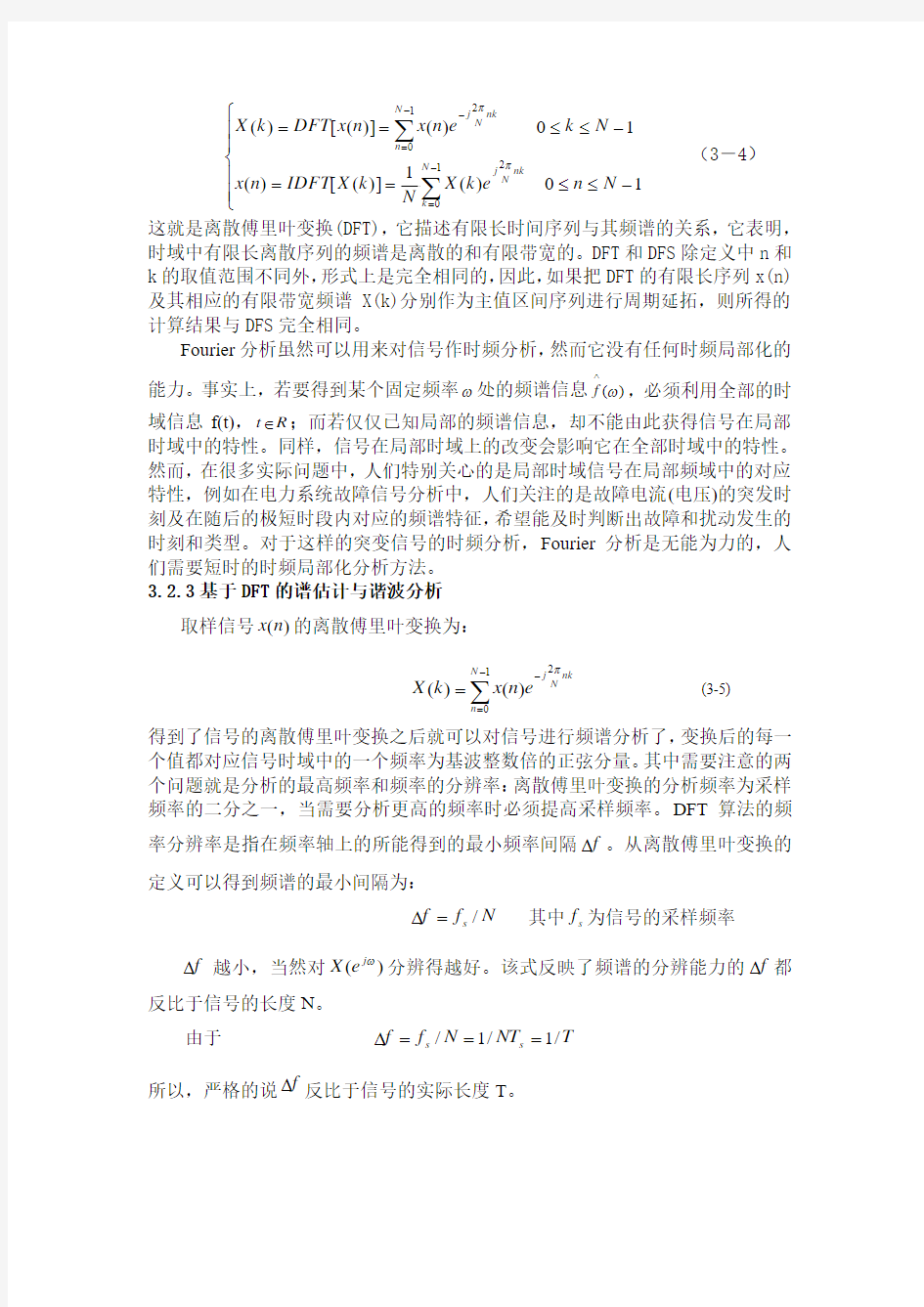
图给出了混有大量白噪声的正弦信号及其自相关变换,从图3-1中我们可以看出经过自相关变换,随机信号中的周期分量表现的更加明显了。
3.3.2 基于周期图法的谱估计和谐波分析
基于周期图法的谱估计是把随机信号)(n x 的N 点观察数据)(n x n 视为一个能量有限信号,直接取)(n x n 的傅里叶变换,得)(k X n ,然后再取幅值的平方,并除以N ,作为对)(n x 真的功率谱)(k S x 的估计,以)(k S x ∧表示用周期图估计出的功率谱,则
2)(1)(k X N k S N x =∧
(2-11) 这种谱估计的方法包含了下述假设及步骤: (1)把平稳随机信号)(n x 视为各态遍历的,用其一个样本)(n x 的N 个观察值)(n x n 来估计)(n x 的功率谱)(k S x 。
(2)从记录到的一个连续信号)(t x 到估计出)(k S x ∧
,还包括了对)(t x 的离散化(A/D),,必要的预处理(如除去均值﹑除去信号的趋势﹑滤波)等。
显然,基于周期图法的谱估计只需对信号序列本身作DFT 运算,然后取其绝对值的平方,再进行该序列长度范围内的平均。因此,采用FFT 算法,很容易直接估计一个实随机序列的功率谱密度的近似值。但是,一个估计的好坏,取决于它的估计与功率谱密度真值之间的误差。分析表明当用周期图法作谱估计时,存在功率谱密度的统计变异性,它是由于在功率谱密度测量中收集的数据数量有限而引起的不确定度。因此,在数据中处理技术上往往采取措施,对周期图法进行修改,以达到尽量减小统计误差的目的。
对于有限长数据的处理,由于数据的概率性质,而产生你统计误差,此称为谱估计的变异性,用变异系数来表征谱估计的变异性,变异系数定义为: )]([)]
([k S k S x x r ∧∧=μσε (3-12)
即谱估计的均方差与均值之比。 -50050100150200250300350400-4-3-2
-101
234采样点数 A/p.u. (a) 原始信号 -50050100150200250300350400-1.0-0.50.00.5
1.01.5
2.0采样点数 A/p.u.
(b) 变换结果 图3-1 混有白噪声的正弦信号及其自相关变换结果
由分析可知,谱估计)(k S x ∧是两个独立高斯变量的平方和,它相当与具有两个自由度的卡埃平方分布。从概率统计学可知,卡埃平方分布
222212n z z z ++=χ (3-13)
式中,2χ是自由度为n 的卡埃平方变量;i z 是独立随机变量,服从正态分布;n 是独立变量数,称为自由度。
变量2χ的均值和方差:
n E =][2χ (3-14)
n 22=σ (3-15)
所以由前定义可知,其变异系数:
n
k S k S x x r 2)]([)]
([==∧∧
μσε (3-16) 显然用(2-11)式作谱估计时,相当于具有自由度n=2.因此,其估计的变异系数为1。这表明估计的功率谱密度的相对误差达到了100%,即估计的变异性和被估量一样大,这样的估计是不合用的,为此可采用平均化处理方法来提高估计精度。
对周期图进行平均化处理,将会使变异系数r ε减小,得到较高的谱估计精度。平均周期图的方法是将序列x(n)分段,求各段周期图,再进行平均。设序列x(n)总体长度为N ,将其分为q 段,每段长度为q N ,对每段数据q N 作谱估计,得到
)(1k S ,)(2k S ,……,)(k S q ,此时有:
)]()()([1)(21k S k S k S q k S q +++=∧
(3-17) 如果各段频率分量的实部)(k X Rj 与虚部)(k X Rj (j=1,2,……,q)是互为独立的随机变量,那么有:
∑∑===+q j q j j Ij
Rj k X k X k X 112
22
)()]()([ (3-18) 可以看出,此时2χ分布的自由度n=2q 。将各段估计谱在对应的频率上作q 个估计量的平均,可以得到:
∑∑∑===∧===q j q
j q j j j q j x k X N k X qN k S q k S 11122)(1)(1)(1)( (3-19)
此时变异系数:q r /1=ε
此式表明,随平均谱的分段数q 增大,其r ε值减小,显然分段数越多,即2χ变量数增多,自由度增加,故而减少了谱估计的变异性。
进一步分析可知,对于连续随机过程,样本总体长度为T(T=N △t), △t 为采样间隔,分段长度e T (T/q),那么分析带宽e e T B /1=,故而有
e
r TB q 11==ε (3-20) 显然,这以关系式与模拟分析方法中所得到的结论是一致的。欲提高谱估计精度,必须同时考虑到样本总体长度T 与频率分析带宽e B 。
3.3.3基于经典谱估计的谐波分析的特点
经典谱估计的主要特点是:
1.经典谱估计,不论是相关函数法还是周期图法,都可以用FFT 快速计算,且物理意义明确,因而依是目前校常用的谱估计方法。
2.频率的分辨率(区分两个相邻频率分量的能力)不高。这是因为他们的频率分辨率(以赫兹计)反比于数据记录的长度(以秒计),而实际应用中引用很长的数据记录进行经典谱估计需要很大的计算量,同时不能满足一些实时性比较高的场合,所以当数据记录不长时分辨率不高。
3.经典谱估计方法在工程中都是以离散傅里叶变换(DFT)为基础的,它隐含着对无限长数据序列的加窗处理(加了一个有限宽的矩形窗)。矩形窗的频谱主瓣不是无限窄的,且有旁瓣存在,这将导致能量向旁瓣中”泄漏”,主瓣变得模糊不清。严重时,会使主瓣产生很大失真,甚至主瓣中的弱分量被旁瓣中的强泄漏所掩盖。
为了克服以上缺点,人们曾做过长期努力,提出了平均﹑加窗平滑等方法,在一定程度上改善了经典谱估计的性能。实践证明,对于长数据记录来说,以傅里叶变换为基础的经典谱估计方法,的确是比较实用。但是,经典方法始终无法更本解决频率分辨率和谱估计稳定性之间的矛盾,特别是在数据记录很短的情况下,这一矛盾显得尤为突出。在这个基础上发展起来了两种新的频谱分析方法:加窗和频谱校正方法和基于现代谱估计的功率谱估计。
3.4 基于窗函数的谐波分析
3.4.1能量泄漏和栅栏效应
按傅里叶变换的原理,如果要计算一个信号的频谱,所观测的信号长度应该是无限的
dt e t x f X jft π2)()(-∞
∞-?= (3-21) 设信号为余弦波
)2cos()(0t f A t x π= (3-22)
则按式(3-21)计算得到的频谱为线谱。但在工程实际中无限长的观测区间是做不
到的,只能从某时刻开始测取有限时间长度T 的一段,这就相当于用一个窗函数对信号进行截断。
)()()(t u t x t x s ?= (3-23)
式中)(t u 为窗函数,按照时域卷积定理,截断后余弦信号的频谱为
)()()(f U f X f X s *= (3-24)
式中)(f U 为窗函数的频谱。信号频谱由原来的线谱变为以0f 为中心向两边扩展的连续谱,能量泄漏到整个频带。这种现象称之为能量泄漏。能量泄漏后在信号频率0f 处的频谱形状等于信号截断时所加的窗函数的窗谱形状)(f U ,通过改变窗长和窗函数类型就可以达到控制能量泄漏的目的。
设信号)(f X 的频率分析范围是 },0{max f ,在此区间内频率f 有无穷多个取值。受计算量限制,我们只能计算有限个频率点上的值,简单而直观的做法是把区间},0{max f 分成N 个等分,每等分间的频率取样间隔为N f df /max =,在实际应用中 ,信号频谱通常采用FFT 算法计算,其最大分析频率max f 为信号采样频率s f 的一半,谱线数N 为FFT 数据长度M 的一半 ,有M f df s /=。取样后只能得到各离散频率点},.....,2,,0{Ndf df df 的值 ,其余频率点相当于被取样的栅栏给挡住看不见;若信号中的频率分量f 与某取样频率点重合idf f =,则我们能够得到该频率分量的精确值:
)()()(f i X f i X f X s s ?=?= (3-25)
如果信号中的频率分量f 与频率取样点不重合f idf f ?+=,则只能按四舍五入的原则 ,取相邻的频率取样点谱线值代替:
)()()(idf X f idf X f X s s ≈?+= (3-26)
频谱的离散取样造成了栅栏效应,谱峰越尖锐,产生误差的可能性就越大。例如,对一个正弦波信号来说,其理想的频谱为线谱。当信号频率值与频谱离散取样点不相等时,在频谱上该频率分量根本看不见,栅栏效应的误差为无穷大。在实际应用中,由于信号时域截断的原因,产生了能量泄漏误差,正弦波信号能量以其频率为中心向两边泄漏。由于能量泄漏的原因,即使信号频率与频谱离散取样点不相等,我们也能得到该频率分量的一个近似值。从这个意义上来说,能量泄漏误差不完全是有害的。如果没有信号时域截断产生的能量泄漏误差,频谱离散取样造成的栅栏效应误差将是不能接受的。能量泄漏分主瓣泄漏和旁瓣泄漏,主瓣泄漏可以减小因栅栏效应带来的谱峰幅值估计误差,有其好的一面,而
旁瓣泄漏则是完全有害的;主瓣越宽,信号谱峰越平缓,抑制栅栏效应误差的效果越好,但频谱的频率分瓣率随之变差。能量泄漏的形状由所加的时窗函数所对应的窗谱形状确定,从减小栅栏效应造成的幅值估计误差的角度出发,理想的时窗函数的窗谱是一个宽度为离散频率取样间隔df 的矩形窗。由信号时频域对应关系 ,我们可以得到理想情况下时窗函数的公式
tdf
tdf t U ππ2)2sin()(= (3-27) 要实现一个理想的矩形窗谱,其时窗长度为整个时间轴,这实际上是不可能的,必须对其进行截断。设用一个长度为2T 的矩形窗口对信号进行截断,有
??
???≥≤=T t T t tdf tdf t u ,0,2)2sin()(ππ (3-28) 由于时域的截断导致频域的振荡,其窗谱的主瓣只能近似为矩形,这样仍然有很大的幅值估计误差。
3.4.2 频谱校正与插值
在采样数据长度选取的和被分析频率不匹配的时候,被分析的频率不能在离散频谱中直接的表现出来,这时候可以采用插值的方法来分析该频率的幅值和相位信息(频谱校正)。以下简单的介绍频谱校正的推导过程:将矩形窗的频谱函数离散化之后有:
)sin()sin()(N
k k k W ππ= (3-29) 在一般应用中由于1>>N ,所以该方程可以简化为:
k
k N N k k k W ππππ)sin(/)sin()(== (3-30) 在该式中我们还可以忽略系数N ,而且这时候k 不是整数,利用x 代替k ,Y 代替)(k W 有:
x
x Y ππ)sin(= (3-31) 对于函数x
x x f Y ππ)sin()(==满足下式: 0)1()1()(=+?++?x f x x f x (3-32)
证明: 0)sin()sin()1())1(sin()1()sin(=++=++++?π
ππππππππx x x x x x x x 所以在矩形窗函数的频谱上取任取两点),(111y x P ﹑),(222y x P ,当121=-x x 时,两点的重心为坐标原点。如果两点在主瓣内,就相当于谱线抽样的情况,可以采
用求重心的方法来求主瓣中心的横坐标。
假设离散频谱的横坐标用谱线序号12~1-=N k 表示,所对应的频率为: N
f k f s ?= (3-33) 用主瓣内相邻谱峰最高的两条谱线k ,k-1按重心法规求主瓣重心的横坐标0x 有
1
1110)1(----+-+=++-=k k k k k k k Y Y Y k Y Y kY Y k x (3-34) 同理,用k ,k+1谱线求重心时有 110++++
=k k k Y Y Y k x 令 k k x ?+=0 (3-35) 则得到频率的校正公式为???????≤?≤->+-≤?≤≥+=?+----+++0110)
(111
11111k Y Y Y Y Y k Y Y Y Y Y k k k k k k k k k k k (3-36) 校正频率为:N
f k k f s k )(?+= (3-37) 矩形窗主瓣函数为 )
())(sin(00x x x x A Y --=ππ (3-38) 相当于把式(3-31)乘以系数A 并平移到0x x =处,0x 和A 分别为分析信号的频率和幅值,k Y ,1-k Y 为主瓣内两根谱线,利用式(3-31)和(3-32)计算出0x 后,再利用上式就可以求出A :
)
sin(k kY A k ??=ππ (3-39) 矩形窗频谱函数的相位角:ω?2
1--
=N (3-40) 将N k /2πω=代入式(3-40):k N N k N N ππ?1221--=--=,在主瓣内可以近似认为1/)1(≈-N N ,则π?k -=,这表明矩形窗的相位是线性的。真实信号的频谱函数和窗函数的频谱函数作复卷积时是复数相乘,即相位相加。如果谱线修正量k ?在-0.5~0.5之间,由上式可知相位角引入的误差在2/~2/ππ-之间,说
明了不经过修正的相位误差是不能忍受的。相位的校正量为
π?k ?-=? (3-41)
设其频谱实部为x R ,虚部为x I ,校正相位为
?θ?+=-)(1x
x k R I tg (3-42) 3.4.3频谱分析中的峰值搜索
因为窗函数的多样性及大部分窗函数的频谱公式过于复杂,利用窗函数频谱图形的校正方法在实际使用中有其局限性,对于较简单的窗函数可以将频率﹑幅值及相位的校正公式推导出来 ,但对较复杂的窗函数要做到这一点将是非常困难的。考虑到真实信号的谱峰应该位于窗函数的最大值处,可以采用搜索该最大值位置来确定信号的频率偏移量,而且这种峰值搜索的方法与窗函数的具体形式无关。
从对矩形窗频谱对研究可以得出这样的结论:
1. 窗谱峰值,即窗谱主瓣中心,处于最高谱线和次高谱线之间。
2. 窗谱峰值更加靠近最高谱线。
由以上两点可以得到峰值搜索的方法:假设我们得到了两根主瓣内的最高的谱线1f ,2f (21f f >),令m 为最高谱线和次高谱线的比值
)
()()()(020121?-??=--==f W W f f AW f f AW Y Y m (3-43) 其中W 为窗函数的频谱函数,0f 为信号的真实频率,f ?为频率分辨率,?为最高谱线和真实谱线之间的距离,2/0f ?≤?≤。可见m 只和主瓣波形有关系为此 ,只要在窗谱主瓣图形上找出满足式(3-43)条件的?就可达到寻找窗频谱主瓣中心的目的。
峰值搜索方法可以归纳为:
1. 选取一个迭代计算的起点,可以去f a ?=25.0,计算)
1()(a W a W n -=与m 进行比较,存在三种比较结果。
2. 当n>m 时,以一定的算法增加a ,然后将计算出来的n 继续和m 比
较。
3. 当n 较。 4. 当n=m 时,这时就找到了最高谱线和真实谱线之间的距离了。 这样峰值搜索过程就成为了一个非线性方程的数值求解了,采用好的迭代算法可以减少搜索的计算量。 3.5 基于现代谱估计的谐波分析 3.5.1简介 现代谱估计分析技术开始于60年代中期,1967年首先由伯格(Burg)提出了最大熵谱分析方法(MEM)。MEM 不认为观测数据以外的数据全为零,没有固定的窗口函数,从而克服了传统估计方法中的固有缺陷,提高了谱的分辨率。MEM 的出现,被认为是频谱分析中的一项突破,不少新的谱分析方法亦应运而生。后来所出现的线性自回归模型法(简称AR 模型法)与Burg 的最大熵谱分析方法是等价的,它们都可归结为通过Yule-Walker 方程求解自回归模型的系数问题。目前常用的求自回归模型系数的算法由三种:Levinson 的递推算法;Burg 递推算法;正反向线性预测最小二乘法。除了最大熵分析法外,近年来出现了许多适用于不同情况的提高谱估计分辨率的新方法,如滑动平均(MA)模型法与自回归滑动平均(ARMA)法。另外,还有最大似然法,最小交叉熵方法等。 3.5.2最大熵谱估计的基本原理 最大熵谱分析方法把信息熵的概念引入信号处理中,有时由称为现代时序谱分析方法。这是一种把自相关函数外推的方法,在分析过程中,没有固定的窗口函数。在每一步外推自相关函数中,使估计的相关函数包含过程的信息最多,即要求在过程的熵达到最大的条件下,确定未知的自相关函数值,借以达到谱估计的逼真和稳定程度最好的目的。换句话说,就是采用谱熵为最大的准则来估计功率谱。 可以证明,N 维高斯随机序列信源的相对熵为: R e N X h log 2 12log 2)(+=π (3-44) 式中,R (或记为det[R])表示矩阵[R]的行列式。自相关矩阵[R]是托布列兹矩阵,又可以写成: ????? ???????-+---=)0()1()()1()0()1()()1()0(][r m r m r m r r r m r r r R (3-45) 由此式可知,当序列∞→N 时,熵将发散,这时就不能用它来测量信息量,在此情况下可用熵率表示,熵率定义为: []11]det[log 2 1lim 1)(lim +∞→∞→=+=N N N R N x h h (3-46) 又根据Wienner-Knintchine 关系式,功率谱密度与自相关函数之间是互为Fourier 变换关系。可以证明,自相关函数矩阵[R]的行列式det[R]的极限与功率谱密度函数S(f)的关系是: })(log 21exp{2])(det[lim 11?-+∞→=N N f f N N N N df f S f f R (3-47) 式中,F t f N 221=?=,奈奎斯特采样频率; F 是信号频限,即带宽;t ?是采样间隔。 由此可以得到熵率, ?-+=N N f f N N f df f S f h 2log 21)(log 41 (3-48) 此式百名,信号序列的熵密度(熵率)是时间序列的谱的对数的奈奎斯特频率范围的积分。 为了计算功率谱,依据Wiener-Knintchine 关系,频谱S(f)与自相关函数R(k)之间的关系为: ?-?=N N f f t fk j df e f S k R π2)()( (3-49) ∑∞ -∞ =?-?=k t fk e k R t f S π2)()( (3-50) 如前所述,当随机信号按奈奎斯特采样频率产生随机序列时,采样周期N f t 2/1=?。由(3-48)就可以得到随机信号序列的熵率: ?∑?∑-∞-∞=?--∞-∞=?-= ?+=N N N N f f k t fk N f f k t fk j N N df e k R f df e k R t f f h ])(log[41])(log[412log 2122ππ (3-51) 在Wienner-Knintchine 关系约束下,当由观测到的随机序列数据估计自相关函数,并使每步估计的熵为最大时,即有: 0)(=??k R h (1+≥m k ) 由此求得: ?-?=N N f f t fk j df e f S 0) (12π (3-52) 式中,功率谱密度S(f)应受到上面熵率导数等于零的条件约束,它的倒数可用截短的Fourier 级数表示,即把1/S(f)展开为2m+1个有限级数之和,则得: ))(()()(10 2*0212∑∑∑=?-=?--=??==m k t fk j k m k t fk j k m m m h t fk j n e a e a tP e C f S πππ (3-53) 由(3-50)和(3-53),并令t f j e z ?=π2,则有: ∑∑∑=-=∞-∞=-=????????????m k k k m m k k k k k z a P z a z k R 0*0)( (3-54) 式中,△t 为采样间隔;k a 为预测滤波器的系数(或AR 模型参数);m P 为预测误 差的方差;*k a 表示k a 的复共轭。比较上式左右两边z 的等幂项,得到如下方程 式,即Yule-Walker 方程式: )0()2()1()(0 )1()1()0()1()()2()1()0(212121=++-+-+=-++++=++++R a m R a m R a m R m R a R a R a R P m R a R a R a R m m m m (3-55) 解Yule-Walker 方程式,由式(3-53)便得到MEM 谱: 2121)(∑=?+?=m k t fk k m e a tP f S π (3-56) 此式表明,MEM 谱与参数k a 和m P 有关。因此,如何根据观测数据的自相关函数,快速,准确地计算参数k a 和m P ,就是MEM 分析方法的中心内容。不同的参数估计算法,就产生了不同的现代谱分析方法,典型的估计方法有Levison,Burg,Akaike,Marple 算法等。 3.5.3最大熵谱估计的特点 同传统谱比较,MEM 谱不仅没有传统谱受到数据加窗这一致命弱点带来的一系列缺陷,而且由于它是连续谱,从理论上讲,谱光滑,谱峰陡峭,频率分辨率无限高,不存在传统谱是离散谱带来频率分辩误差这一问题。对传统谱而言,样本数越短,一方面是窗影响越加严重,另一方面是频率分辩误差成比例增大,以致在短样本时传统谱无法应用,传统谱对许多瞬变过程的研究无能为力。而MEM 谱不存在这些问题,数据长短虽对参数估计有所影响,但不涉及加窗与频率分辨误差问题,所以MEM 谱适用于短数据。此外,MEM 谱的频率分辨率同传统谱频率分辨率的来源本质上不同。传统谱的谱线间隔决定了谱的分辨率,当样本长度N 一定时,谱线间隔为定值;而MEM 谱离散化的频率增量为L f s 2/,L 为离散后谱线总条数,L 值决定于分析分析系统(如计算机或专用信号处理机显示谱线数),它与样本长度N 值无关,只要增加谱线总条数L ,系统分辨率成比例增加。由于MEM 谱的以上特点,所以MEM 谱使用于短数据样本,缓慢变化的谱估计。 MEM 谱也存在一些缺陷,例如,频率定位精度随信噪比减小而减小;有谱线偏差和谱线分裂想象;谱估计同正弦过程的功率不成正比;谱估计精度决定于模型类型,阶数,参数等;模型不正确,影响估计精度。这些问题还有待进一步研究和解决。 实验一 离散时间信号分析 班级 信息131班 学号 201312030103 姓名 陈娇 日期 一、实验目的 掌握两个序列的相加、相乘、移位、反褶、卷积等基本运算。 二、实验原理 1.序列的基本概念 离散时间信号在数学上可用时间序列)}({n x 来表示,其中)(n x 代表序列的第n 个数字,n 代表时间的序列,n 的取值范围为+∞<<∞-n 的整数,n 取其它值)(n x 没有意义。离散时间信号可以是由模拟信号通过采样得到,例如对模拟信号)(t x a 进行等间隔采样,采样间隔为T ,得到)}({nT x a 一个有序的数字序列就是离散时间信号,简称序列。 2.常用序列 常用序列有:单位脉冲序列(单位抽样)) (n δ、单位阶跃序列)(n u 、矩形序列)(n R N 、实指数序列、复指数序列、正弦型序列等。 3.序列的基本运算 序列的运算包括移位、反褶、和、积、标乘、累加、差分运算等。 4.序列的卷积运算 ∑∞ -∞==-= m n h n x m n h m x n y )(*)()()()( 上式的运算关系称为卷积运算,式中代表两个序列卷积运算。两个序列的卷积是一个序列与另一个序列反褶后逐次移位乘积之和,故称为离散卷积,也称两序列的线性卷积。其计算的过程包括以下4个步骤。 (1)反褶:先将)(n x 和)(n h 的变量n 换成m ,变成)(m x 和)(m h ,再将)(m h 以纵轴为对称轴反褶成)(m h -。 (2)移位:将)(m h -移位n ,得)(m n h -。当n 为正数时,右移n 位;当n 为负数时,左移n 位。 (3)相乘:将)(m n h -和)(m x 的对应点值相乘。 (4)求和:将以上所有对应点的乘积累加起来,即得)(n y 。 三、主要实验仪器及材料 微型计算机、Matlab6.5 教学版、TC 编程环境。 四、实验内容 (1)用Matlab 或C 语言编制两个序列的相加、相乘、移位、反褶、卷积等的程序; (2)画出两个序列运算以后的图形; (3)对结果进行分析; (4)完成实验报告。 五、实验结果 六、实验总结 数字信号处理作业提交日期:2016年7月15日 实验一 维纳滤波器的设计 第一部分 设计一维纳滤波器。 (1)产生三组观测数据,首先根据()(1)()s n as n w n =-+产生信号()s n ,将其加噪(信噪比分别为20,10,6dB dB dB ),得到观测数据123(),(),()x n x n x n 。 (2)估计()i x n ,1,2,3i =的AR 模型参数。假设信号长度为L ,AR 模型阶数为N ,分析实验结果,并讨论改变L ,N 对实验结果的影响。 1 实验原理 滤波技术是信号分析、处理技术的重要分支,无论是信号的获取、传输,还是信号的处理和交换都离不开滤波技术,它对信号安全可靠和有效灵活地传递是至关重要的。信号分析检测与处理的一个十分重要的内容就是从噪声中提取信号,实现这种功能的有效手段之一是设计一种具有最佳线性过滤特性的滤波器,当伴有噪声的信号通过这种滤波器的时候,它可以将信号尽可能精确地重现或对信号做出尽可能精确的估计,而对所伴随噪声进行最大限度地抑制。维纳滤波器就是这种滤波器的典型代表之一。 维纳(Wiener )是用来解决从噪声中提取信号的一种过滤(或滤波)方法。这种线性滤波问题,可以看做是一种估计问题或一种线性估计问题。 设一线性系统的单位样本响应为()h n ,当输入以随机信号()x n ,且 ()() () x n s n v n =+,其中()s n 表示原始信号,即期望信号。()v n 表示噪声,则输出()y n 为()=()()m y n h m x n m -∑,我们希望信号()x n 经过线性系统()h n 后得到的()y n 尽可能接近 于()s n ,因此称()y n 为估计值,用?()s n 表示。 则维纳滤波器的输入-输出关系可用下面表示。 设误差信号为()e n ,则?()()()e n s n s n =-,显然)(n e 可能是正值,也可能是负值,并且它是一个随机变量。因此,用它的均方误差来表达误差是合理的,所谓均方误差最小即 它的平方的统计期望最小:222?[|()|][|()()|][|()()|]E e n E s n s n E s n y n =-=-=min 。而要使均方误差最小,则需要满足2[|()|]j E e n h ?=0. 进一步导出维纳-霍夫方程为:()()()()*(),0,1,2...xs xx xx i R m h i R m i R m h m m =-==∑ 写成矩阵形式为:xs xx R R h =,可知:1xs xx h R R -=。表明已知期望信号与观测数据的互相关函数以及观测信号的自相关函数时,可以通过矩阵求逆运算,得到维纳滤波器的 数字信号处理的应用与发展趋势 作者:王欢 天津大学信息学院电信三班 摘要: 数字信号处理是应用于广泛领域的新兴学科,也是电子工业领域发展最为迅速的技术之一。本文就数字信号处理的方法、发展历史、优缺点、现代社会的应用领域以及发展前景五个方面进行了简明扼要的阐述。 关键词: 数字信号处理发展历史灵活稳定应用广泛发展前景 数字信号处理的简介 1.1、什么是数字信号处理 数字信号处理简称DSP,英文全名是Digital Signal Processing。 数字信号处理是利用计算机或专用处理设备以数字的形式对信号进行采集、变换、滤波、估值、增强、压缩、识别等处理,以得到符合人们需要的信号形式。 DSP系统的基本模型如下: 数字信号处理是一门涉及许多学科且广泛应用于许多领域的新兴学科。它以众多的学科为理论基础,所涉及范围及其广泛。例如,在数学领域、微积分、概率统计、随即过程、数值分析等都是数字信号处理的基本工具;同时与网络理论、信号与系统、控制论、通信理论、故障诊断等学科也密切相关。近年来的一些新兴学科,如人工智能、模式识别、神经网络等,都是与数字信号处理密不可分的。数字信号处理可以说许多经典的理论体系作为自己的理论基础,同时又使自己成为一门新兴学科的理论基础。 1.2、数字信号系统的发展过程 数字信号处理技术的发展经历了三个阶段。 70 年代DSP 是基于数字滤波和快速傅里叶变换的经典数字信号处理, 其系统由分立的小规模集成电路组成, 或在通用计算机上编程来实现DSP 处理功能, 当时受到计算机速度和存储量的限制,一般只能脱机处理, 主要在医疗电子、生物电子、应用地球物理等低频信号处理方面获得应用。 80 年代DSP 有了快速发展, 理论和技术进入到以快速傅里叶变换(FFT) 为主体的现代信号处理阶段, 出现了有可编程能力的通用数字信号处理芯片, 例如美国德州仪器公司(TI公司) 的TMS32010 芯片, 在全世界推广应用, 在雷达、语音通信、地震等领域获得应用, 但芯片价格较贵, 还不能进 入消费领域应用。 90 年代DSP 技术的飞速发展十分惊人, 理论和技术发展到以非线性谱估计为代表的更先进的信号处理阶段, 能够用高速的DSP 处理技术提取更深层的信息, 硬件采用更高速的DSP 芯片, 能实时地完成巨大的计算量, 以TI 公司推出的TMS320C6X 芯片为例, 片内有两个高速乘法器、6 个加法器, 能以200MHZ 频率完成8 段32 位指令操作, 每秒可以完成16 亿次操作, 并且利用成熟的微电子工艺批量生产,使单个芯片成本得以降低。并推出了C2X 、C3X 、C5X 、C6X不同应用范围的系列, 新一代的DSP 芯片在移动通信、数字电视和消费电子领域得到广泛应用, 数字化的产品性能价 格比得到很大提高, 占有巨大的市场。 1.3、数字信号处理的特点 如何学好数字信号处理课程 《数字信号处理》是相关专业本科生培养中,继《信号与系统》、《通信原理》、《数字逻辑》等课程之后的一门专业技术课。数字信号处理的英文缩写是DSP ,包括两重含义:数字信号处理技术(Digital Signal Processing )和数字信号处理器(Digital Signal Processor )。目前我们对本科生开设的数字信号处理课程大多侧重在处理技术方面,由于课时安排和其他一些原因,通常的特点是注重理论推导而忽略具体实现技术的介绍。最后导致的结果就是学生在学习了数字信号处理课程之后并不能把所学的理论知识与实际的工程应用联系起来,表现在他们做毕业设计时即使是对学过的相关内容也无法用具体的手段来实现,或者由于无法与具体实际相挂钩理解而根本就忘记了。我相信,我们开设本课程的根本目的应该是让学生在熟练掌握数字信号处理的基本原理基础上,能结合工程实际学习更多的DSP 实现技术及其在通信、无线电技术中的应用技能,这也是符合DSP 本身的二重定义的,学生通过本课程的学习,将应该能从事数字信号处理方面的研究开发、产品维护等方面的技术工作。其实很多学生在大学四年学习过后都有这种反思:到底我在大学学到了什么呢?难道就是一些理论知识吗?他们将如何面对竞争日益激烈的社会呢? 因此,大家在应用MATLAB学习并努力掌握数字信号处理的原理,基本理论的同时,应该始终意识到该课程在工程应用中的重要性,并在课后自学一些有关DSP技术及FPGA技术方面的知识。这样,学习本课程学习的三部曲是:一,学习数字信号处理的基本理论;二,掌握如何用MATLAB 实现一些基本的算法,如FFT ,FIR 和IIR 滤波器设计等;三,选择一种数字信号处理器作为实现平台进行实践学习,比如TI 公司的TMS320C54x 系列芯片,包括该处理器的硬件和软件系统,如Code Composer Studio及像MATLAB Link for Code Composer Studio这样的工具。 在学习数字信号处理的过程中,要注重培养自己的工程思维方法。数字信号处理的理论含有许多研究问题和解决问题的科学方法,例如频率域的分析方法、傅里叶变换的离散做法、离散傅里叶变换的快速计算方法等, 这些方法很好。虽然它们出现在信号处理的专业领域, 但是, 其基本精神是利用事物的特点和规律解决实际问题, 这在各个领域中是相同的。还有, 数字信号处理的理论的产生是有原因的, 这些原因并不难懂, 就是理论为应用服务, 提高使用效率。 例如: 为什么要使用频率域的分析方法?原因是从时间看问题, 往往看到事物的表面, 就像 我们用眼睛看水只能看到水的颜色, 看不到水的基本成分, 同样, 从时间看信号只能看到信号变化的大小和快慢,看不到信号的基本成分; 若采用分解物质的方法, 从成分的角度去看, 用化学分析则能看到水的各种成分, 同样, 用分解信号的方法则能看到信号里的基本成分, 至于基本成分的选择则视哪种基本类型最适合实际信号处理, 这就是频率域的分析方法。 又如: 为什么要采用离散的傅里叶变换?原因很简单, 因为要利用计算机计算傅里叶变换, 而计算机只能计算数据, 不能计算连续变量, 所以必须分离连续的傅里叶变换, 使它成为离散的傅里叶变换。 再如: 为什么要采用离散傅里叶变换的快速计算方法?原因是, 理论上离散傅里叶变换能让计算机分析频谱, 但是, 直接按照离散傅里叶变换的定义计算它, 计算量太大, 实用价值不大; 只有采用巧妙的方法降低计算量, 则离散傅里叶变换才有实用价值,这种巧妙的方法就 是离散傅里叶变换的快速计算方法。降低计算量的巧妙之处在, 离散傅里叶变换的计算量与信号的长度成正比, 科学家想办法将信号分解成为短信号, 分解成为短信号的方法有多种, 只要开动脑筋,我们也是一样可以想出来的。 最后,感谢同学们对我的支持,我会尽我所能,与大家共同探索"数字信号处理"领域的奇妙世界。 实验6 数字滤波器的网络结构 一、实验目的: 1、加深对数字滤波器分类与结构的了解。 2、明确数字滤波器的基本结构及其相互间的转换方法。 3、掌握用MA TLAB 语言进行数字滤波器结构间相互转换的子函数及程序编写方法。 二、实验原理: 1、数字滤波器的分类 离散LSI 系统对信号的响应过程实际上就是对信号进行滤波的过程。因此,离散LSI 系统又称为数字滤波器。 数字滤波器从滤波功能上可以分为低通、高通、带通、带阻以及全通滤波器;根据单位脉冲响应的特性,又可以分为有限长单位脉冲响应滤波器(FIR )和无限长单位脉冲响应滤波器(IIR )。 一个离散LSI 系统可以用系统函数来表示: M -m -1-2-m m m=0 012m N -1-2-k -k 12k k k=1 b z b +b z +b z ++b z Y(z)b(z)H(z)=== =X(z)a(z) 1+a z +a z ++a z 1+a z ∑∑ 也可以用差分方程来表示: N M k m k=1 m=0 y(n)+a y(n-k)=b x(n-m)∑∑ 以上两个公式中,当a k 至少有一个不为0时,则在有限Z 平面上存在极点,表达的是以一个IIR 数字滤波器;当a k 全都为0时,系统不存在极点,表达的是一个FIR 数字滤波器。FIR 数字滤波器可以看成是IIR 数字滤波器的a k 全都为0时的一个特例。 IIR 数字滤波器的基本结构分为直接Ⅰ型、直接Ⅱ型、直接Ⅲ型、级联型和并联型。 FIR 数字滤波器的基本结构分为横截型(又称直接型或卷积型)、级联型、线性相位型及频率采样型等。本实验对线性相位型及频率采样型不做讨论,见实验10、12。 另外,滤波器的一种新型结构——格型结构也逐步投入应用,有全零点FIR 系统格型结构、全极点IIR 系统格型结构以及全零极点IIR 系统格型结构。 2、IIR 数字滤波器的基本结构与实现 (1)直接型与级联型、并联型的转换 例6-1 已知一个系统的传递函数为 -1-2-3 -1-2-3 8-4z +11z -2z H(z)=1-1.25z +0.75z -0.125z 将其从直接型(其信号流图如图6-1所示)转换为级联型和并联型。 实验一 离散傅里叶变换(DFT )对确定信号进行谱分析 一.实验目的 1.加深对DFT 算法原理和基本性质的理解。 2.熟悉DFT 算法和原理的编程方法。 3.学习用DFT 对信号进行谱分析的方法,了解可能出现的误差及其原因,以便在实际中正确利用。 二.实验原理 一个连续信号)(t x a 的频谱可以用其傅里叶变换表示,即 dt e t x j X t j a a Ω-∞ ∞ -? = Ω)()( 若对)(t x a 进行理想采样可得采样序列 )(|)()(nT x t x n x a nT t a === 对)(n x 进行DTFT ,可得其频谱为: ∑∞ -∞ =-= n n j j e n x e X ωω )()( 其中数字频率ω与模拟频率Ω的关系为: s f T Ω = Ω=ω )(n x 的DFT 为∑∞ -∞ =-= n nk N j e n x k X π 2)()( 若)(t x a 是限带信号,且在满足采样定理的条件下,)(ω j e X 是)(Ωj X a 的周期延拓, )(k X 是)(ωj e X 在单位圆上的等间隔采样值,即k N j e X k X πωω2| )()(= =。 为在计算机上分析计算方便,常用)(k X 来近似)(ω j e X ,这样对于长度为N 的有限 长序列(无限长序列也可用有限长序列来逼近),便可通过DFT 求其离散频谱。 三.实验内容 1.用DFT 对下列序列进行谱分析。 (1))()04.0sin(3)(100n R n n x π= 1 (2)]0,0,0,0,0,0,0,0,1,1,1,1[)(=n x 2.为了说明高密度频谱和高分辨率频谱之间的区别,考察序列 )52.0cos()48.0cos()(n n n x ππ+= (1)当0≤n ≤10时,确定并画出x(n)的离散傅里叶变换。 (2)当0≤n ≤100时,确定并画出x(n)的离散傅里叶变换。 四.实验结果 1. (1) (2) 实验一MATLAB语言的基本使用方法 实验类别:基础性实验 实验目的: (1)了解MATLAB程序设计语言的基本方法,熟悉MATLAB软件运行环境。 (2)掌握创建、保存、打开m文件的方法,掌握设置文件路径的方法。 (3)掌握变量、函数等有关概念,具备初步的将一般数学问题转化为对应计算机模型并进行处理的能力。 (4)掌握二维平面图形的绘制方法,能够使用这些方法进行常用的数据可视化处理。 实验内容和步骤: 1、打开MATLAB,熟悉MATLAB环境。 2、在命令窗口中分别产生3*3全零矩阵,单位矩阵,全1矩阵。 3、学习m文件的建立、保存、打开、运行方法。 4、设有一模拟信号f(t)=1.5sin60πt,取?t=0.001,n=0,1,2,…,N-1进行抽样,得到 序列f(n),编写一个m文件sy1_1.m,分别用stem,plot,subplot等命令绘制32 点序列f(n)(N=32)的图形,给图形加入标注,图注,图例。 5、学习如何利用MATLAB帮助信息。 实验结果及分析: 1)全零矩阵 >> A=zeros(3,3) A = 0 0 0 0 0 0 0 0 0 2)单位矩阵 >> B=eye(3) B = 1 0 0 0 1 0 0 0 1 3)全1矩阵 >> C=ones(3) C = 1 1 1 1 1 1 1 1 1 4)sy1_1.m N=32; n=0:N-1; dt=0.001; t=n*dt; y=1.5*sin(60*pi*t); subplot(2,1,1), plot(t,y); xlabel('t'); ylabel('y=1.5*sin(60*pi*t)'); legend('正弦函数'); title('二维图形'); subplot(2,1,2), stem(t,y) xlabel('t'); ylabel('y=1.5*sin(60*pi*t)'); legend('序列函数'); title('条状图形'); 00.0050.010.0150.020.0250.030.035 t y = 1 . 5 * s i n ( 6 * p i * t ) 二维图形 00.0050.010.0150.020.0250.030.035 t y = 1 . 5 * s i n ( 6 * p i * t ) 条状图形 实验5 抽样定理 一、实验目的: 1、了解用MA TLAB 语言进行时域、频域抽样及信号重建的方法。 2、进一步加深对时域、频域抽样定理的基本原理的理解。 3、观察信号抽样与恢复的图形,掌握采样频率的确定方法和插公式的编程方法。 二、实验原理: 1、时域抽样与信号的重建 (1)对连续信号进行采样 例5-1 已知一个连续时间信号sin sin(),1Hz 3 ππ=0001f(t)=(2f t)+6f t f ,取最高有限带宽频率f m =5f 0,分别显示原连续时间信号波形和F s >2f m 、F s =2f m 、F s <2f m 三情况下抽样信号的波形。 程序清单如下: %分别取Fs=fm ,Fs=2fm ,Fs=3fm 来研究问题 dt=0.1; f0=1; T0=1/f0; m=5*f0; Tm=1/fm; t=-2:dt:2; f=sin(2*pi*f0*t)+1/3*sin(6*pi*f0*t); subplot(4,1,1); plot(t,f); axis([min(t),max(t),1.1*min(f),1.1*max(f)]); title('原连续信号和抽样信号'); for i=1:3; fs=i*fm;Ts=1/fs; n=-2:Ts:2; f=sin(2*pi*f0*n)+1/3*sin(6*pi*f0*n); subplot(4,1,i+1);stem(n,f,'filled'); axis([min(n),max(n),1.1*min(f),1.1*max(f)]); end 程序运行结果如图5-1所示: 原连续信号和抽样信号 图5-1 (2)连续信号和抽样信号的频谱 由理论分析可知,信号的频谱图可以很直观地反映出抽样信号能否恢复原模拟信号。因此,我们对上述三种情况下的时域信号求幅度谱,来进一步分析和验证时域抽样定理。 例5-2编程求解例5-1中连续信号及其三种抽样频率(F s>2f m、F s=2f m、F s<2f m)下的抽样信号的幅度谱。 程序清单如下: dt=0.1;f0=1;T0=1/f0;fm=5*f0;Tm=1/fm; t=-2:dt:2;N=length(t); f=sin(2*pi*f0*t)+1/3*sin(6*pi*f0*t); wm=2*pi*fm;k=0:N-1;w1=k*wm/N; F1=f*exp(-j*t'*w1)*dt;subplot(4,1,1);plot(w1/(2*pi),abs(F1)); axis([0,max(4*fm),1.1*min(abs(F1)),1.1*max(abs(F1))]); for i=1:3; if i<=2 c=0;else c=1;end fs=(i+c)*fm;Ts=1/fs; n=-2:Ts:2;N=length(n); f=sin(2*pi*f0*n)+1/3*sin(6*pi*f0*n); wm=2*pi*fs;k=0:N-1; w=k*wm/N;F=f*exp(-j*n'*w)*Ts; subplot(4,1,i+1);plot(w/(2*pi),abs(F)); axis([0,max(4*fm),1.1*min(abs(F)),1.1*max(abs(F))]); end 程序运行结果如图5-2所示。 由图可见,当满足F s≥2f m条件时,抽样信号的频谱没有混叠现象;当不满足F s≥2f m 条件时,抽样信号的频谱发生了混叠,即图5-2的第二行F s<2f m的频谱图,,在f m=5f0的围,频谱出现了镜像对称的部分。 数字信号处理实验答案 HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】 实验一熟悉Matlab环境 一、实验目的 1.熟悉MATLAB的主要操作命令。 2.学会简单的矩阵输入和数据读写。 3.掌握简单的绘图命令。 4.用MATLAB编程并学会创建函数。 5.观察离散系统的频率响应。 二、实验内容 认真阅读本章附录,在MATLAB环境下重新做一遍附录中的例子,体会各条命令的含义。在熟悉了MATLAB基本命令的基础上,完成以下实验。 上机实验内容: (1)数组的加、减、乘、除和乘方运算。输入A=[1 2 3 4],B=[3 4 5 6],求C=A+B,D=A-B,E=A.*B,F=A./B,G=A.^B并用stem语句画出A、B、C、D、E、F、G。 clear all; a=[1 2 3 4]; b=[3 4 5 6]; c=a+b; d=a-b; e=a.*b; f=a./b; g=a.^b; n=1:4; subplot(4,2,1);stem(n,a); xlabel('n');xlim([0 5]);ylabel('A'); subplot(4,2,2);stem(n,b); xlabel('n');xlim([0 5]);ylabel('B'); subplot(4,2,3);stem(n,c); xlabel('n');xlim([0 5]);ylabel('C'); subplot(4,2,4);stem(n,d); xlabel('n');xlim([0 5]);ylabel('D'); subplot(4,2,5);stem(n,e); xlabel('n');xlim([0 5]);ylabel('E'); subplot(4,2,6);stem(n,f); xlabel('n');xlim([0 5]);ylabel('F'); subplot(4,2,7);stem(n,g); xlabel('n');xlim([0 5]);ylabel('G'); (2)用MATLAB实现下列序列: a) x(n)= 0≤n≤15 b) x(n)=e+3j)n 0≤n≤15 c) x(n)=3cosπn+π)+2sinπn+π) 0≤n≤15 d) 将c)中的x(n)扩展为以16为周期的函数x(n)=x(n+16),绘出四个周期。 数字信号处理是将信号以数字方式表示并处理的理论和技术。数字信号处理与模拟信号处理是信号处理的子集。 简介 简单地说,数字信号处理就是用数值计算的方式对信号进行加工的理论和技术,它的英文原名叫digital signal processing,简称DSP。另外DSP也是digital signal processor的简称,即数字信号处理器,它是集成专用计算机的一种芯片,只有一枚硬币那么大。有时人们也将DSP看作是一门应用技术,称为DSP 技术与应用。 《数字信号处理》这门课介绍的是:将事物的运动变化转变为一串数字,并用计算的方法从中提取有用的信息,以满足我们实际应用的需求。 本定义来自《数字信号处理》杨毅明著,由机械工业出版社2012年发行。 特征和分类 信号(signal)是信息的物理体现形式,或是传递信息的函数,而信息则是信号的具体内容。 模拟信号(analog signal):指时间连续、幅度连续的信号。 数字信号(digital signal):时间和幅度上都是离散(量化)的信号。 数字信号可用一序列的数表示,而每个数又可表示为二制码的形式,适合计算机处理。 一维(1-D)信号: 一个自变量的函数。 二维(2-D)信号: 两个自变量的函数。 多维(M-D)信号: 多个自变量的函数。 系统:处理信号的物理设备。或者说,凡是能将信号加以变换以达到人们要求的各种设备。模拟系统与数字系统。 信号处理的内容:滤波、变换、检测、谱分析、估计、压缩、识别等一系列的加工处理。 多数科学和工程中遇到的是模拟信号。以前都是研究模拟信号处理的理论和实现。 模拟信号处理缺点:难以做到高精度,受环境影响较大,可靠性差,且不灵活等。数字系统的优点:体积小、功耗低、精度高、可靠性高、灵活性大、易于大规模集成、可进行二维与多维处理 随着大规模集成电路以及数字计算机的飞速发展,加之从60年代末以来数字信号处理理论和技术的成熟和完善,用数字方法来处理信号,即数字信号处理,已逐渐取代模拟信号处理。 随着信息时代、数字世界的到来,数字信号处理已成为一门极其重要的学科和技术领域。 数字信号处理器 DSP芯片,也称数字信号处理器,是一种特别适合于进行数字信号处理运算的微处理器,其主要应用是实时快速地实现各种数字信号处理算法。根据数字信号处理的要求,DSP芯片一般具有如下主要特点: (1)在一个指令周期内可完成一次乘法和一次加法; 实验1认识实验-MATLAB语言上机操作实践 一、实验目的 ㈠了解MATLAB语言的主要特点、作用。 ㈡学会MATLAB主界面简单的操作使用方法。 ㈢学习简单的数组赋值、运算、绘图、流程控制编程。 二、实验原理 ㈠简单的数组赋值方法 MATLAB中的变量和常量都可以是数组(或矩阵),且每个元素都可以是复数。 在MATLAB指令窗口输入数组A=[1 2 3;4 5 6;7 8 9],观察输出结果。然后,键入:A(4,2)= 11 键入:A (5,:) = [-13 -14 -15] 键入:A(4,3)= abs (A(5,1)) 键入:A ([2,5],:) = [ ] 键入:A/2 键入:A (4,:) = [sqrt(3) (4+5)/6*2 –7] 观察以上各输出结果。将A式中分号改为空格或逗号,情况又如何?请在每式的后面标注其含义。 2.在MATLAB指令窗口输入B=[1+2i,3+4i;5+6i ,7+8i], 观察输出结果。 键入:C=[1,3;5,7]+[2,4;6,8]*i,观察输出结果。 如果C式中i前的*号省略,结果如何? 键入:D = sqrt (2+3i) 键入:D*D 键入:E = C’, F = conj(C), G = conj(C)’ 观察以上各输出结果, 请在每式的后面标注其含义。 3.在MATLAB指令窗口输入H1=ones(3,2),H2=zeros(2,3),H3=eye(4),观察输出结果。 ㈡、数组的基本运算 1.输入A=[1 3 5],B= [2 4 6],求C=A+B,D=A-2,E=B-A 2.求F1=A*3,F2=A.*B,F3=A./B,F4=A.\B, F5=B.\A, F6=B.^A, F7=2./B, F8=B.\2 *3.求B',Z1=A*B’,Z2=B’*A 观察以上各输出结果,比较各种运算的区别,理解其含义。 ㈢、常用函数及相应的信号波形显示 例1:显示曲线f(t)=2sin(2πt),(t>0) ⅰ点击空白文档图标(New M-file),打开文本编辑器。 ⅱ键入:t=0:0.01:3; (1) f=2*sin(2*pi*t); (2) plot(t,f); title(‘f(t)-t曲线’); xlabel(‘t’),ylabel(‘f(t)’); 实验三:离散LSI 系统的频域分析 一、实验内容 2、求以下各序列的z 变换: 12030() ()sin() ()sin()n an x n na x n n x n e n ωω-=== 程序清单如下: syms w0 n z a; x1=n*a^n;X1=ztrans(x1) x2=sin(w0*n);X2=ztrans(x2) x3= exp(-a*n)*sin(w0*n);X3=ztrans(x3) 程序运行结果如下: X1 =z/(a*(z/a - 1)^2) X2 =(z*sin(w0))/(z^2 - 2*cos(w0)*z + 1) X3 =(z*exp(a)*sin(w0))/(exp(2*a)*z^2 - 2*exp(a)*cos(w0)*z + 1) 3、求下列函数的逆z 变换 0 312342 1 1() () () ()() 1j z z z z X z X z X z X z z a z a z e z ω---= = = = ---- 程序清单如下: syms w0 n z a; X1=z/(z-a);x1=iztrans(X1) X2= z/(a-z)^2;x2=iztrans(X2) X3=z/ z-exp(j*w0);x3=iztrans(X3) X4=(1-z^-3)/(1-z^-1);x4=iztrans(X4) 程序运行结果如下: x1 =a^n x2 =n*a^n/a 课程名称 数字信号 实验成绩 指导教师 实 验 报 告 院系 信息工程学院 班级 学号 姓名 日期 x3 =charfcn[0](n)-iztrans(exp(i*w0),w0,n) x4 =charfcn[2](n)+charfcn[1](n)+charfcn[0](n) 4、求一下系统函数所描述的离散系统的零极点分布图,并判断系统的稳定性 (1) (0.3)()(1)(1) z z H z z j z j -= +-++ z1=[0,0.3]';p1=[-1+j,-1-j]';k=1; [b1,a1]=zp2tf(z1,p1,k); subplot(1,2,1);zplane(z1,p1); title('极点在单位圆外); subplot(1,2,2);impz(b1,a1,20); 由图可见:当极点位于单位圆内,系统的单位序列响应随着频率的增大而收敛;当极点位于单位圆上,系统的单位序列响应为等幅振荡;当极点位于单位圆外,系统的单位序列响应随着频率的增大而发散。由此可知系统为不稳定系统。 -1 -0.5 00.51 -2 -1.5-1-0.500.511.5 2Real Part I m a g i n a r y P a r t 极点在单位圆外 n (samples) A m p l i t u d e Impulse Response 什么是数字信号处理?有哪些应用? 利用数字计算机或专用数字硬件、对数字信号所进行的一切变换或按预定规则所进行的一切加工处理运算。 例如:滤波、检测、参数提取、频谱分析等。 对于DSP:狭义理解可为Digital Signal Processor 数字信号处理器。广义理解可为Digital Signal Processing 译为数字信号处理技术。在此我们讨论的DSP的概念是指广义的理解。 数字信号处理是利用计算机或专用处理设备,以数字形式对信号进行采集、变换、滤波、估值、增强、压缩、识别等处理,以得到符合人们需要的信号形式。 信号处理的实质是对信号进行变换。 信号处理的目的是获取信号中包含的有用信息,并用更直观的方式进行表达。 DSP的应用几乎遍及电子学每一个领域。 ▲通用数字信号处理器:自适应滤波,卷积,相关,数字滤波,FFT, 希尔伯特变换,波形生成,窗函数等等。 ▲语音信号处理:语音增强、识别、合成、编码、信箱等,文字/语音转换 ▲图形/图像处理:三维动画,图象鉴别/增强/压缩/传输,机器人视觉等等图 ▲特殊应用数字信号处理:振动和噪声分析与处理,声纳和雷达信号处理, 通信信号处理, 地震信号分析与处理,汽车安全及全球定位,生物医学工程等等。 在医疗、军事、汽车等行业,以及通信市场、消费类电子产品等中具有广阔的市场前景。 数字信号处理系统的基本组成:前置预滤波器(PrF)、a/d变换器(ADC)、数字信号处理器(DSP)、d/a变换器(DAC)、模拟滤波器(PoF) 数字信号处理特点: 1.大量的实时计算(FIR IIR FFT), 2.数据具有高度重复(乘积和操作在滤波、卷积和FFT中等常见) 数字信号处理技术的意义、内容 数字信号处理技术是指数字信号处理理论的应用实现技术,它以数字信号处理理论、硬件技术、软件技术为基础和组成,研究数字信号处理算法及其实现方法。 意义: 在21世纪,数字信号处理是影响科学和工程最强大的技术之一 它是科研人员和工程师必须掌握的一门技巧 DSP芯片及其特点 ▲采用哈佛结构体系:独立的程序和数据总线,一个机器周期可同时进行程序读出和数据存取。对应的:冯·诺依曼结构。 ▲采用流水线技术: ▲硬件乘法器:具有硬件连线的高速“与或”运算器 ▲多处理单元:DSP内部包含多个处理单元。 ▲特殊的DSP指令:指令具有多功能,一条指令完成多个动作;如:倒位序指令等 ▲丰富的外设▲功耗低:一般DSP芯片功耗为0.5~4W。采用低功耗技术的DSP芯片只有0.1W/3.3V、1.6V (电池供电) DSP芯片的类别和使用选择 ▲按特性分:以工作时钟和指令类型为指标分类▲按用途分:通用型、专用型DSP芯片 ▲按数据格式分:定点、浮点各厂家还根据DSP芯片的CPU结构和性能将产品分成若干系列。 TI公司的TMS320系列DSP芯片是目前最有影响、最为成功的数字信号处理器,其产品销量一直处于领先地位,公认为世界DSP霸主。 ?目前市场上的DSP芯片有: ?美国德州仪器公司(TI):TMS320CX系列占有90% 数字信号处理实验四 第一题结果: (1)没有增加过渡点 源码如下: N = 15; H = [1 1 1 0.5 zeros(1,7) 0.5 1 1 1]; %确定抽样点的幅度大小 %H(3,13) = 0.75;H(5,11) = 0.25; %设置过渡点 k = 0:N-1; A = exp(-j*pi*k*(N-1)/N); %抽样点相位大小 HK = H.*A; %求抽样点的H(k) hn = ifft(HK,N); %求出FIR的单位冲激响应h(n) freqz(hn,1,256); %画出幅频相频曲线figure(2); stem(real(hn),'.'); %绘制单位冲激响应的实部 line([0,35],[0,0]);xlabel('n');ylabel('Real(h(n))'); 单位脉冲响应曲线 幅频和相频特性曲线 (2)增加过渡点 源码如下: N = 15; H = [1 1 1 0.5 zeros(1,7) 0.5 1 1 1]; %确定抽样点的幅度大小 H(3) = 0.75;H(13) = 0.75;H(5) = 0.25;H(11) = 0.25; %设置过渡点 k = 0:N-1; A = exp(-j*pi*k*(N-1)/N); %抽样点相位大小 HK = H.*A; %求抽样点的H(k) hn = ifft(HK,N); %求出FIR的单位冲激响应h(n) freqz(hn,1,256); %画出幅频相频曲线figure(2); stem(real(hn),'.'); %绘制单位冲激响应的实部 line([0,35],[0,0]);xlabel('n');ylabel('Real(h(n))'); 单位脉冲响应曲线 幅频和相频特性曲线 第二题结果: Title: Hard Core DSP – What it is and how to make it happen Author: Lynn Patterson Title: VP Product Development Date: 6/11/98 OVERVIEW In recent years Digital Signal Processing technology has been applied to a variety of types of processing applications. Generally these can be classified as non-real time, soft real-time and hard-core real-time applications. Non real-time DSP refers to applications where the huge FLOP capacity of the DSP is put to work on historical data. The data was collected and archived for processing at a later time. The data is stored on some type of mass storage media and job processed in a compute center. Some examples are seismic evaluation, image enhancement and intelligent signal extraction applications. Soft real-time DSP refers to applications where data arrives to the system from a “sensor” as it is sampled, an algorithm is applied to that data and results are posted. This process repeats continuously. In a “soft” system, the processing node may not be able to fully process all data without some tuning of the system. This on-the-fly adjustment can be implemented in several ways. 1. The data source can be throttled – that is there is some handshaking mechanism from the processing back to the source that triggers the source to slow the rate at which it delivers data to the system for processing. 2. The system employs the elasticity in the system buffers to hold the additional data samples over the steady state rate. Essentially, one or several blocks of data are queued up while one block requires longer for processing than the time line alotted . The ability to allow for oversized buffering space is typically difficult and typically the worst case scenario can not be accounted for. 3. Data is dropped. If the processing node can not accept the samples or block of samples, it is dropped and is not retrievable. 4. Additional processing nodes are applied to the data stream. This requires the system to have a real-time dynamic architecture. 5. The algorithm applied to the data adjusts to require a reduced processing load under peak conditions. Depending on the nature of the adjustment, this may or may not differentiate an application as soft or hard real-time. In all of these cases the “performance” of the system may vary over time but the system does not fail. Consider the case ff the system throttles itself, the overall performance drops since the system does not run at full speed. For the case of elastic buffers, dropped data may ultimately result if the processing can not “catch up”. Therefore, for cases 2 and 3, if data is dropped, the algorithm has a reduced set of data to work on and it should be expected that the quality of the result is decreased. The fourth case is rarely possible in real-time systems. However, if the system did accommodate this, it is reasonable to assume that the additional processing is taken from another system task and the overall performance of the system is reduced due to that. The final case also implies a decrease in the quality of the result since a reduced algorithm was implemented. Consider an example of an image inspection system, if throttling is implemented, the full algorithm is applied but the rate of inspection for the system is decreased and hence the performance of the product. If data is dropped, less frames are averaged and the quality of the image is reduced. I will assume additional processors can not be employed as this is an数字信号处理实验一
数字信号处理实验报告
数字信号处理的应用和发展前景
如何学习数字信号处理
数字信号处理实验作业
数字信号处理实验
数字信号处理实验报告
数字信号处理实验作业
数字信号处理实验答案完整版
DSP数字信号处理
数字信号处理实验1认识实验
数字信号处理实验三
什么是数字信号处理
数字信号处理实验4
硬核DSP简介及其实现
相关主题
文本预览