自适应神经模糊推理系统及其仿真应用
刘雨刚,耿立明,杨威
辽宁工程技术大学电气与控制工程学院,辽宁葫芦岛(125105)
摘 要:本文介绍了自适应神经模糊推理系统的结构,以及如何用MATLAB 模糊工具箱提供的ANFIS 应用工具仿真,完成训练模糊神经网络。
关键词:自适应神经模糊推理系统,MATLAB ,模糊神经网络
0 引言
由Jyh-Shing R.Jang 提出的自适应神经模糊推理系统[1],是一种基于Takagi -Sugeno 模型的模糊推理系统(简称ANFIS )。研究表明,当输入模糊集采用非梯形/非三角形的隶属函数时,Sugeno 型模糊系统需要的模糊规则及输入的模糊集的个数较少。
1 基于Takagi -Sugeno 模型的自适应神经模糊推理系统
所考虑的模糊推理系统有两输入和,单输出f 。
1x 2x 对于零阶T-S 模糊模型,模糊规则的第i 条规则有如下形式:
⑴ 后件为恒值:Ri : ),...,2,1( , 221121n i f y Then A x A x If i i i ==是和是
⑵ 后件为一阶线性方程:Ri :
0,1,2)(j ),( ,...,2,1 ),( , 221102*********是常数是和是=++===ij i i i i i i i a x a x a a x x f n
i x x f y Then A x A x If 式中,Ri 表示第i 条规则,Ai 表示模糊子集,即{NL ,NM ,NS ,ZO ,PS ,PM ,PL}={“负
大”,“负中”,“负小”,“零”,“正小”,“正中”,“正大”}。 在T-S 模型中,每条规则的结论部分是个线性方程,表示系统局部的线性输入/输出关系,而系统的总输入是所有线性子系统输出的加权平均,可以表示全局的非线性输入输出关系,所以,T-S 模型是一种对非线性系统局部线性化的描述方法,它具有非常重要的研究意义和广泛的应用范围[2]。
典型的单交叉路口东、南、西、北四个方向,每个方向均有右行、直行和左行三股车流。依据各个车道的车流信息,以路口流通能力最大或排队候车的时间最短为目标,通过设计自适应神经模糊推理系统,对交叉路口交通信号进行控制,实时确定各个相位的配时,具体地
说每一相交通信号的配时e i (i=1,2,3,4)
由该相位的主队列w1、后继相的主队列w2两者确定,当前相的主队列起决定作用,后继相的主队列起调节作用。所谓主队列是一个相位两个方向中车辆等待数较大的等待队列。
2 ANFIS 的结构
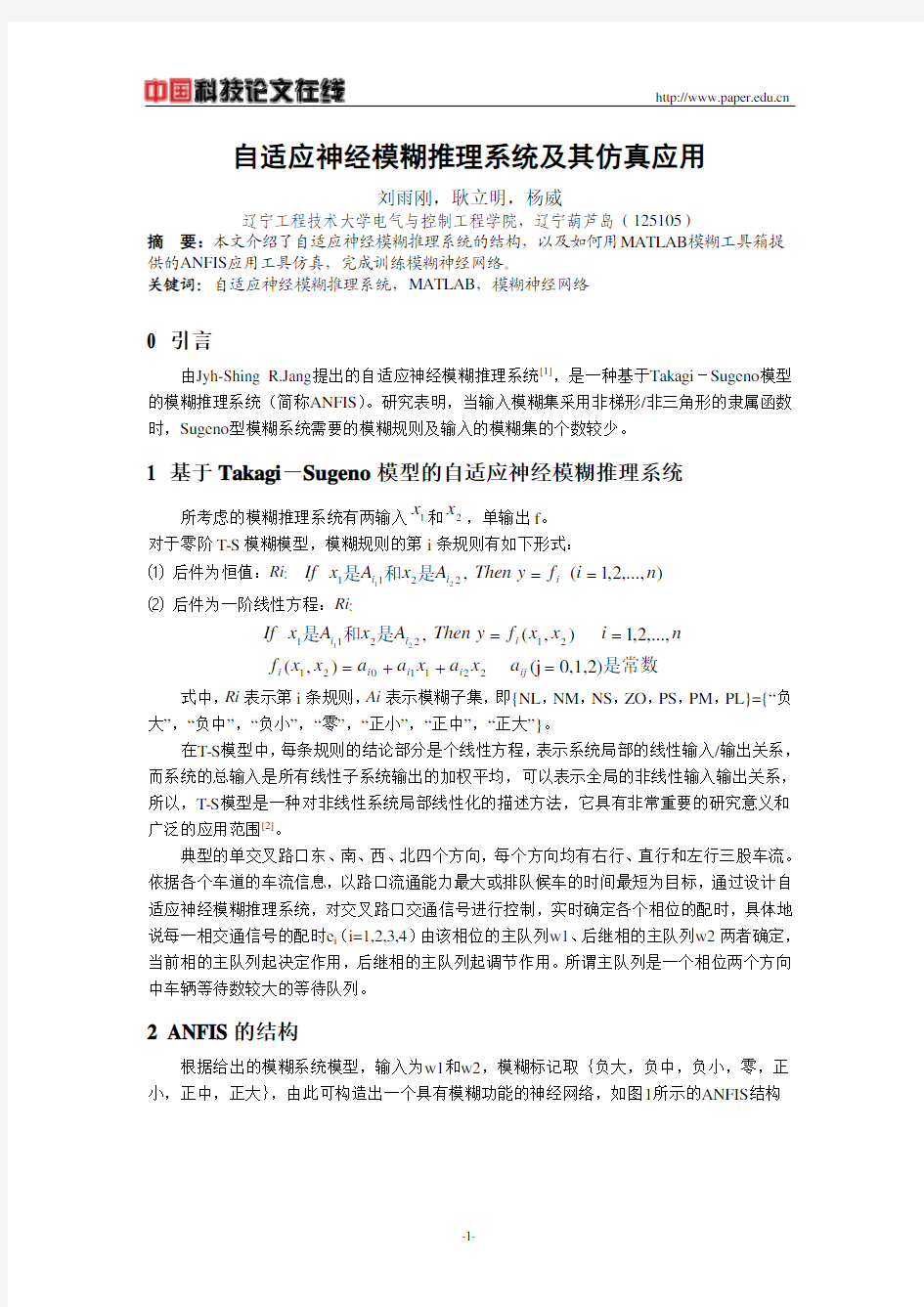
根据给出的模糊系统模型,输入为w1和w2,模糊标记取{负大,负中,负小,零,正小,正中,正大},由此可构造出一个具有模糊功能的神经网络,如图1所示的ANFIS 结构
图1 ANFIS 结构
由图1可以看出,输入w1和w2各自被送入一个前向人工神经网络,该网络的激活函数的形状即代表模糊隶属函数的形状,确定采用线性或指数型,分别对应模糊隶属函数的三角型和高斯型,输入层神经元的个数代表模糊标记数,通过调节输入层网络的权值和偏差,可以达到调节激活函数的宽度及其中心位置的目的。
各层的功能如下:
第1层:将输入变量x=[x,y]T 模糊化,输出对应模糊集的隶属度,这一层的每个节点i 是一个有节点函数的自适应节点,其中一个节点的传递函数可以表示为:
)()1(x u O i A i
= , i=1,2 式中为模糊集A 的隶属度,并且它确定了给定输入满足量A 的程度。这里A 的
隶属度可以是任意合适的参数化隶属函数,根据所选择的隶属函数的形式,可以得到相应的参数集,称为条件参数。如高斯隶属函数:
()1i O ()???????
???=22exp i i i A c x x u σ 则条件参数集为所有
{}i i c ,σ的集合。本层参数称为规则的前提部分参数。
第2层:实现条件部分的模糊集的运算,每个节点的输出对应每条规则的适用度,是所有输
入信号的乘积: ()()y u x u O Bi i A i i ×==ω2 ,i=1,2 第3层:对各条规则的适用度进行归一化处理。
213ωωωω+==i
i i O ,i=1,2
第4层:每个节点的传递函数为线性函数,表示局部的线性模型,计算出每条规则的输出:
())214
,x x f f O i i i i i ωω== ,i=1,2 第5层:计算所有规则的输出之和:
∑∑∑===i i
i
i i i i i f f f O ωωω5 ,i=1,2
模糊推理系统的参数学习可归结为对条件参数(非线性参数)的调整。在采用神经网络实现模糊化、模糊推理和解模糊化过程中,为了运算简单,模糊神经网络系统采用的模糊推理方式是用乘积—求和代替模糊系统中常用的最小—最大推理法,且输出变量的隶属函数取单值型。
3 模糊神经网络结构的设计
利用MATLAB7.1环境中的模糊逻辑工具箱提供的ANFIS应用工具设计下面的自适应神经一模糊网络并进行初始化、学习和仿真。
3.1 系统生成流程,如图2所示。
图 2 系统生成流程
3.2模糊神经网络仿真过程和步骤
本文用Matlab软件中的模糊逻辑工具箱[3]进行仿真演示,控制系统生成过程主要有以下步聚:
(1)设置系统及其环境的各种参数;给出初始训练数据和检验数据根据所收集的样本数据进行模糊神经网络训练,确定各层的节点阀值及各层之间的连接权重,完成模糊神经网络的设计。
将选取的训练数据和检验数据分别写入两个.dat文件或在程序中直接写入。训练数据为trnData=[…],检验数据chkData=[…],训练数据用于训练ANFIS,而检验数据仅用于验证ANFIS。
要使用ANFIS图形界面编辑器,可在命令行中键入“anfisedit”载入训练数据,检验数据。如图3所示。
图 3 训练数据和检验数据
(2) 确定FNN的输入变量的隶属度函数的类型和数目,产生隶属函数个数和规则组数,构成ANFIS的初始网络结构
网络系统采用两输入、单输出的结构。确定隶属函数个数为7个,规则数为49,隶属函数选为高斯型隶属函数,这样网络的前件确定后,可利用线性最小二乘法估计每条规则的方程即结论部分,由此得到一个初始FIS结构。
(3)进行神经网络的训练,设定ANFIS训练参数,选择训练时长和训练误差容忍限。确定算法进行学习,训练ANFIS模型,经过一定步数得学习后将得到一个FNN的控制系统。
在训练中,设定epochs为160;error tolerance为0;算法为backpropa(反向传播算法),在训练中调整隶属函数并在图形区画出训练数据(或检验数据)误差图。如图4所示。
图 4 训练数据(或检验数据)误差图
4 结束语
本篇文章只是通过一个简单的具体实例说明sugeno型模糊神经网络的应用情况,经过以上控制方案的仿真、分析,可以得知,对要实现的交通信号系统来说,模糊神经网络建模比常规方法有更快的收敛速度和较高的误差精度,模糊神经自适应控制策略有很好的控制性能,是一种行之有效的方法。
参考文献
[1]刘增良等.模糊逻辑与神经网络.北京:北京航空航天大学出版社.1996
[2]王士同等.神经模糊系统及其应用.北京:北京航空航天大学出版社.1998
[3]龚晓芳.MATLAB环境下的ANFIS仿真.全国计算机新科技与计算机继续教育论文集,2003:57~61.
Adaptive network based fuzzy inference system and
simulation application
Liu Yugang, Geng Liming, Yang Wei
Department of Electrical Engineering, Liaoning Technical University, Huludao,
China (123000)
Abstract
This article introduces the adaptive network based fuzzy inference system structure, as well as how to use the ANFIS application tool to simulate which is provided by the MATLAB fuzzy toolbox, to complete the training fuzzy neural network.
Keywords:adaptive network based fuzzy inference system;MATLAB;fuzzy neural network
模糊神经网络(备课笔记) 参考书: 杨纶标,高英仪。《模糊数学原理及应用》(第三版),广 州:华南理工大学出版社 彭祖赠。模糊数学及其应用。武汉:武汉科技大学 胡宝清。模糊理论基础。武汉:武汉大学出版社 王士同。模糊系统、模糊神经网络及应用程序设计。 《模糊系统、模糊神经网络及应用程序设计》 本书全面介绍了模糊系统、模糊神经网络的基本要领概念与原理,并以此为基础,介绍了大量的应用实例及编程实现实例。 顾名思义,模糊神经网络就是模糊系统和神经网络的结合,本质上就是将常规的神经网络(如前向反馈神经网络,Hopfield神经网络)赋予模糊输入信号和模糊权值。 选自【模糊神经网络P17】 预备知识 复杂的东西是难以精确化的,这使得人们所需要的精确性和问题的复杂性间形成了尖锐的矛盾。 正如模糊数学的创始人L.A.Zadeh(查德)教授(美国加利福尼亚大学)所说:“当系统的复杂性增加时,我们使它精确化的能力将减小。直到达到一个阈值,一旦超越它,复杂性和精确性将相互排斥。”这就是著名的“互克性原理”。 该原理告诉我们,复杂性越高,有意义的精确化能力就越低;而复杂性意味着因素众多,以致人们往往不可能同时考察所有因素,只能把研究对象适当简化或抽象成模型,即抓住其中的主要部分而忽略掉次要部分。当在一个被压缩了的低维因素空间考虑问题时,即使本来是明确的概念,也会变得模糊起来。或者某些抽象简化模型本身就带有概念的不清晰,如“光滑铰链”这个力学模型,什么叫“光滑”、什么叫“粗糙”就没有一个明确的定义,客观上两者之间没有绝对分明的界限;主观上,决策者对此类非程序化决策做出判断时,主要是根据他的经验、能力和直观感觉等模糊概念进行决策的。 或者判断一个人的好坏,本来有很多因素,比如人品、性格、相貌
基于DSP的神经自适应模糊控制器的应用 摘要模糊控制器应用在许多领域,但由于其控制参数的不稳定性,导致其控制效果达不到控制要求。本文提出了一种将神经网络与模糊控制器相结合的方法,并应用于基于DSP的变频调速系统中。对系统进行仿真实验后,从仿真结果可以得出:该系统具有较好的控制性能,且能达到较高的控制精度。 关键词DSP;神经自适应模糊控制;MATLAB仿真 中图分类号TM346 文献标识码 A 文章编号1673-9671-(2012)071-0190-01 模糊控制具有较强的不确定性知识表达能力,但其自学习能力比较困难;神经网络具有较强的自学习、自适应能力,但其对不确定知识的表达能力比较困难。因此针对双方的特点相互借鉴和利用,形成的新的结构体系——模糊神经网络。这种新技术充分利用神经网络的自学习、自适应能力,在线调整模糊规则,使模糊控制在保持其较强的知识表达能力的同时,并能提高其自适应能力。 1 神经自适应模糊控制器 神经自适应模糊控制器的结构如图1所示。 其中,nr为速度给定值,nf为速度反馈值,e为速度偏差,E为转速偏差,u为输出控制量,K1,K2分别是E和ΔE的量化因子,K3为u的比例因子。 对于模糊控制器来说,提高控制性能的关键是调整控制规则,可由u≈-(E+ΔE)/2来近似归纳其控制查询表。本文在此基础上引入一个加权系数α,因此又可表示为u≈[αE+(1-α)ΔE],通过调整α值,可以改变E、ΔE对u的加权程度,使控制规则的调整变得更为方便,从而提高控制性能。 2 控制系统的硬件设计 系统的硬件设计部分采用TMS320LF2407A来实现智能速度控制,系统由主电路、控制电路、驱动隔离电路和保护电路等组成。主电路采用交—直—交的间接变频装置;逆变部分采用IPM功率模块来控制驱动电路;控制回路包括DSP、LED显示电路、键盘接口电路、电流检测电路、电压检测电路、电动机转速和位置检测电路等。为了以防加电瞬间冲击,过流、过压等故障损坏整流模块和IPM 模块,系统在主电路设置了充、放电电阻和泄能回路。 3 控制系统的软件设计及仿真实验 系统程序包括主程序和两个中断服务子程序。主程序主要负责DSP初始化、速度环运算及故障诊断工作;PWM中断程序主要负责AD转换、SPWM输出以及串行通信等;串行口中断服务程序负责电机参数的接收。 为了验证本设计的科学性和合理性,对整个变频调速控制系统进行仿真实验。实验中采用型号为Y160M2-2的异步电动机,主要参数为:额定功率1.2 kw,额定转速1420 r/min,额定电流3.8 A,额定电压380 V。本文同时给出了神经自适应模糊控制器和传统PID控制器的仿真响应曲线,以便于性能比较。仿真结果如下图所示。 通过比较两者的响应曲线可以看出,神经自适应模糊控制速度调节器,在动态性能方面,其转速响应曲线更为平滑,超调量更小;稳态性能方面,其稳态误差明显小于传统PID控制,说明其稳态性能要优于传统PID控制。 4 结束语 本文基于模糊神经网络的控制方法,利用神经网络的自学习、自适应能力,
模糊推理神经网络诊断模型案例 [摘要]本文基于通用神经网络的自适应性和诊断的建模方法,建立了一种新的故障诊断模型一模糊神经网络诊断模型,并对它的智能诊断机理和突出特点进行了深入分析。最后,将该诊断模型应用于某大型汽轮发电机组故障诊断中,分析得出它具有明显的提高诊断精确度的优越性。 [关键词]神经网络故障诊断智能诊断 1模糊推理神经网络诊断模型建立 1.1通用网络模型自适应动态特性 比较两类典型的神经网络一前向BP网络与反馈Hopfied网络,可以发现其核心是单层神经网络,则两类网络可以用一个通用神经网络模型来描述。根据点集拓扑理论和人工神经网络空间概念,对这个通用神经网络模型的特征进行分析得出以下两个结论,证明从略。 定理1神经网络空间在紧集上的连续函数空间C上以及按L2范数在平方可积函数空间I上都是稠密的。 推论1由通用神经网络模型所生成的任何开集可以一致逼近紧集上的连续映射函数f∈C(Rn。Rm)。 由推论1表明,通用网络模型所概括的任何开集(如BP网络、Hopfied网络、BAM网络)通过自学习都能一致逼近紧集上的连续映射函数f∈(Rn,Rm),因而具有良好的自学习、自适应动态特性。 1.2诊断建模方法 设xjn(j=1,2,...,k)对应反映设备运行状态第n个观测样本的k个特征参数,yin,(i=1,2,...l)对应第n个样本的1种故障模式,共有N个样本xjn∈RN,yin∈RN,[n=1,2,...,N),则故障模式向量Y={yin,i=1,2,...,l}与特征参数向量x={xin,i=1,2,...,k}间的内在关系用函数P表示,有:X=P(Y)。当N→∞时,函数P的逆函数存在,以函数S表示,有:Y=S(X) 诊断问题建模的实质就是根据有限的样本集,确定函数S(X)的一等价映射关系SS(X),使得对于任意的ε>0,满足:
function [ c, sigma , W_output ] = SOFNN( X, d, Kd ) %SOFNN Self-Organizing Fuzzy Neural Networks %Input Parameters % X(r,n) - rth traning data from nth observation % d(n) - the desired output of the network (must be a row vector) % Kd(r) - predefined distance threshold for the rth input %Output Parameters % c(IndexInputVariable,IndexNeuron) % sigma(IndexInputVariable,IndexNeuron) % W_output is a vector %Setting up Parameters for SOFNN SigmaZero=4; delta=0.12; threshold=0.1354; k_sigma=1.12; %For more accurate results uncomment the following %format long; %Implementation of a SOFNN model [size_R,size_N]=size(X); %size_R - the number of input variables c=[]; sigma=[]; W_output=[]; u=0; % the number of neurons in the structure Q=[]; O=[]; Psi=[]; for n=1:size_N x=X(:,n); if u==0 % No neuron in the structure? c=x; sigma=SigmaZero*ones(size_R,1); u=1; Psi=GetMePsi(X,c,sigma); [Q,O] = UpdateStructure(X,Psi,d); pT_n=GetMeGreatPsi(x,Psi(n,:))'; else [Q,O,pT_n] = UpdateStructureRecursively(X,Psi,Q,O,d,n); end;
自适应神经模糊推理系统及其仿真应用 刘雨刚,耿立明,杨威 辽宁工程技术大学电气与控制工程学院,辽宁葫芦岛(125105) 摘 要:本文介绍了自适应神经模糊推理系统的结构,以及如何用MATLAB 模糊工具箱提供的ANFIS 应用工具仿真,完成训练模糊神经网络。 关键词:自适应神经模糊推理系统,MATLAB ,模糊神经网络 0 引言 由Jyh-Shing R.Jang 提出的自适应神经模糊推理系统[1],是一种基于Takagi -Sugeno 模型的模糊推理系统(简称ANFIS )。研究表明,当输入模糊集采用非梯形/非三角形的隶属函数时,Sugeno 型模糊系统需要的模糊规则及输入的模糊集的个数较少。 1 基于Takagi -Sugeno 模型的自适应神经模糊推理系统 所考虑的模糊推理系统有两输入和,单输出f 。 1x 2x 对于零阶T-S 模糊模型,模糊规则的第i 条规则有如下形式: ⑴ 后件为恒值:Ri : ),...,2,1( , 221121n i f y Then A x A x If i i i ==是和是 ⑵ 后件为一阶线性方程:Ri : 0,1,2)(j ),( ,...,2,1 ),( , 221102*********是常数是和是=++===ij i i i i i i i a x a x a a x x f n i x x f y Then A x A x If 式中,Ri 表示第i 条规则,Ai 表示模糊子集,即{NL ,NM ,NS ,ZO ,PS ,PM ,PL}={“负 大”,“负中”,“负小”,“零”,“正小”,“正中”,“正大”}。 在T-S 模型中,每条规则的结论部分是个线性方程,表示系统局部的线性输入/输出关系,而系统的总输入是所有线性子系统输出的加权平均,可以表示全局的非线性输入输出关系,所以,T-S 模型是一种对非线性系统局部线性化的描述方法,它具有非常重要的研究意义和广泛的应用范围[2]。 典型的单交叉路口东、南、西、北四个方向,每个方向均有右行、直行和左行三股车流。依据各个车道的车流信息,以路口流通能力最大或排队候车的时间最短为目标,通过设计自适应神经模糊推理系统,对交叉路口交通信号进行控制,实时确定各个相位的配时,具体地 说每一相交通信号的配时e i (i=1,2,3,4) 由该相位的主队列w1、后继相的主队列w2两者确定,当前相的主队列起决定作用,后继相的主队列起调节作用。所谓主队列是一个相位两个方向中车辆等待数较大的等待队列。 2 ANFIS 的结构 根据给出的模糊系统模型,输入为w1和w2,模糊标记取{负大,负中,负小,零,正小,正中,正大},由此可构造出一个具有模糊功能的神经网络,如图1所示的ANFIS 结构
第22卷 第8期计 算 机 仿 真2005年8月 文章编号:1006-9348(2005)08-0140-04 自适应神经网络模糊推理系统最优参数的研究 翁玉麟,邓长虹 (武汉大学电气工程学院,湖北武汉,430072) 摘要:模糊规则的提取和隶属度函数的学习是模糊系统设计中重要而困难的问题。自适应神经网络模糊推理系统(ANF IS) 能基于数据建模,无须专家经验,自动产生模糊规则和调整隶属度函数。在建立一个初始系统进行训练时,其隶属度函数的 类型、隶属度函数的数目以及训练次数都是待定的,这三个参数的选择直接影响系统训练后的效果,它们的确定方法有待研 究。该文应用自适应神经网络模糊推理系统的方法对一个典型系统进行建模仿真,并阐述这三个参数的寻优方法。 关键词:自适应神经网络;模糊系统;隶属度函数 中图分类号:TP3 文献标识码:A Research on Best Param eters i n Adaptive Neura l-Fuzzy I nference System W EN G Yu-lin,D EN G Chang-hong (Electrical Engineering School,W uhan University,W uhan Hubei430072,China) ABSTRACT:Extraction of fuzzy rules and learning of parameters of membership functions are vital but difficult when designing a fuzzy system.App lying Adap tive Neural-Fuzzy Inference System(ANF IS)can p roduce fuzzy rules and adjust membership functions automatically based on data w ithout experience of experts.W hen setting up an initialized system to train,the type of membership functions,the number of membership functions and the ti m e of training are all variables,and the choice of these parameters w ill directly affect the result of modeling, but the method for ensuring these parameters still needs research.This paper gives the si mulation examp le for modeling a typ ical system w ith Adap tive Neural-Fuzzy Inference System and expatiates the method for choosing these three parameters. KEYWO RD S:Adap tive neural net work;Fuzzy system;M embership functions 1 引言 自从M amdani和A ssilian利用模糊控制理论为一简单动力过程构造模糊控制器以来,模糊控制在实际问题中的应用日益广泛。但是,模糊理论在实际应用中也存在一些问题,如隶属度函数的确立目前还没有一套成熟有效的方法,在很难或无法获得专家经验的情况下,隶属度函数的确定是十分困难的[1]。自适应神经网络模糊推理系统(ANF IS)能基于数据建模,自动产生模糊规则和隶属度函数,而不是基于经验或直觉给定。这对于那些特性还不被人们所完全了解或者特性非常复杂的系统是十分有效的。许多学者在应用自适应神经网络模糊推理系统建模方面已经进行了探索并获得很多有益的成果,但在建立一个初始系统进行训练时,其隶属度函数的类型、隶属度函数的数目以及训练次数都是待定的,这三个参数的选择直接影响系统训练后的效果,可是选择怎样的参数可以使建立的模型最佳,至今没有学者进行深入的研究。本文应用ANF IS的方法对一个典型系统进行建模仿真,并阐述这三个参数的选择方法。 2 自适应神经网络模糊系统 学者Roger Jang提出了与一阶Sugeno模型模糊推理系统功能相同的自适应神经模糊推理系统(Adap tive Net work-based Fuzzy Inference System,ANF IS)[2][3],它是模糊逻辑和神经网络的结合产物。ANF IS结构的构造见图1,其同一层的每个节点具有相似的功能(这里用O 1,i 表示第一层的第i个节点的输出)。 第一层:该层每个节点i是以节点函数表示的方形节点(该层参数是可变的): 收稿日期:2004-03-17
一、填空题 1、模糊控制器由模糊化接口、解模糊接口、知识库和模糊推理机组成 2、一个单神经元的输入是 1.0 ,其权值是 1.5,阀值是-2,则其激活函数的净输入是-0.5 ,当激活函数是阶跃函数,则神经元的输出是 1 3、神经网络的学习方式有导师监督学习、无导师监督学习 和灌输式学习 4、清晰化化的方法有三种:平均最大隶属度法、最大隶属度取最小/最大值法和中位数法,加权平均法 5、模糊控制规则的建立有多种方法,是:基于专家经验和控制知识、基于操作人员的实际控制过程和基于过程的模糊模型,基于学习 6、神经网络控制的结构归结为神经网络监督控制、神经网络直接逆动态控制、神网自适应控制、神网自适应评判控制、神网内模控制、神网预测控制六类 7.傅京逊首次提出智能控制的概念,并归纳出的3种类型智能控制系统是 、和。 7、人作为控制器的控制系统、人机结合作为控制器的控制系统、无人参与的自主控 制系统 8、智能控制主要解决传统控制难以解决的复杂系统的控制问题,其研究的对象具备的3个特点为、和。 8、不确定性、高度的非线性、复杂的任务要求 9.智能控制系统的主要类型有、、、 、和。 9、分级递阶控制系统,专家控制系统,神经控制系统,模糊控制系统,学习控制系统,集成或者(复合)混合控制系统 10.智能控制的不确定性的模型包括两类:(1) ; (2) 。 10、(1)模型未知或知之甚少;(2)模型的结构和参数可能在很大范围内变化。11.控制论的三要素是:信息、反馈和控制。 12.建立一个实用的专家系统的步骤包括三个方面的设计,它们分别是、和。知识库的设计推理机的设计人机接口的设计13.专家系统的核心组成部分为和。知识库、推理机 14.专家系统中的知识库包括了3类知识,它们分别为、、和。判断性规则控制性规则数据
基于神经网络的永磁同步电动机模糊自适应控制! 许振伟蒋静坪骆再飞 "浙江大学电气工程学院杭州#$%%&’( )*++,-.-/01234560758)57/9:9;-:3.5663*7-8630<57= >?@A B C D B E F E G C HF E C H I E C J?K@G E L B E "M K N N B H B K L O N B P Q R E P G N O C H E C B B R E C H S@A B T E G C HU C E V B R W E Q X S Y G C H Z A K?S#$%%&’( -;:07-40[CQ A E WI G I B R S D BI R K I K W BGP K C Q R K N W P A B\B L K R Q A BW I B B]W B R V KP K C Q R K N K L^_‘_D E Q AL?Z Z XG]G I Q E V B P K C Q R K N a G W B]K CC B?R G N C B Q D K R b c[CK R]B RQ KE\I R K V BQ A B R K a?W Q C B W W K L Q A B W X W Q B\S D B?W B K C d N E C B W B N L d N B G R C E C H Q B P A d C E e?B Q KK a Q G E CW Q B IB R R K R Q KW?a W Q E Q?B L K R Q A B R B H?N G R Q K Q G N L B B]a G P bB R R K R S G C]Q A BN B G R C E C HG C]P K C Q R K N Q G b BI N G P BW E d \?N Q G C B K?W N X c f A BI R B P E W E K CG C]R K a?W Q C B W WK L Q A BW X W Q B\ G R B B g P B N N B C Q c =h i FFNN)和自适应神经网络模糊推理系统(ANFIS)模型评价地下水位的对比研究 [印度]P. D. Sreekanth,P. D. Sreedevi,Shakeel Ahmed,N. Geethanjali 田芳译;冯翠娥、段琦校译 当水均衡呈持续负值时,水位预测成为地下水规划和管理的一项重要任务。在位于安德拉邦Ranga Reddy区的Maheshwaram流域,地 下水过量开采,管理地下水资源需要完全了解地下水流动态特征。然 而,地下水流动态特征由于人类和气候影响不断发生变化,且地下水 系统十分复杂,包括多种非线性和不确定因素。人工神经网络模型作 为一个有力的、灵活的统计建模技术被引入到地下水科学中以处理复 杂的模式认识问题。本次研究给出了两种模型的对比,即基于 Levenberg-Marquardt(LM)算法的前馈神经网络(FFNN)与模糊逻 辑自适应模糊推理系统(ANFIS)模型在评价Maheshwaram流域的地 下水位中的准确性的对比。用于分析的统计指标包括均方根误差 (RMSE),回归系数(R2)和误差变异(EV)。结果显示,FFNN-LM 和ANFIS模型对于评价上述地区的地下水位均具有较好的准确性 (RMSE分别为4.45和4.94,R2都为93%)。 1 引言 地下水是半干旱地区尤其是基岩地区一切生物不可缺少的资源。在很多地区,地表水资源匮乏,部分地区甚至没有地表水。近三十年来,为了满足农业和工业部门的需求,地下水过量开采。大范围的开凿深井导致印度部分地区尤其是基岩地区地下水位显著下降。本次研究的目的是应用两种适当的模拟方法评价现有含水层系统的地下水动态,并进行对比。 近期,软计算工具,例如人工神经网络(ANNs)和模糊逻辑被广泛应用于各种科技领域进行预测研究(Gail等,2002)。ANN是具有有限变量的通用模型,作为通用的函数近似解(Hornik等,1989)。与传统方法相比,它能够预测一些非线性时间序列事件(Guan等,2004;Hill等,1996;Tang和Fishwick,1993;Zhang,2003;French等,1992)。软计算技术是基于生物系统的信息处理原理。复杂的生物信息处理系统使得人类能够完成诸如认识周围环境,做出预测,并相应地计划和行动等而得以生存。人类信息处理的类型包括逻辑和直觉两种。 传统的计算机系统的逻辑性很好,但是它们的直觉却远不及人类。对于一个具有类似人类信息处理能力的计算系统,它应该足够灵活地支持以下三个特点: 自适应模糊控制几个基本问题的研究进展 谢振华程江涛耿昌茂 (海军航空工程学院青岛分院航空军械系青岛 266041 ) 周德云 (西北工业大学西安 710072 ) [摘要] 综述了模糊控制系统的稳定性分析、系统设计及系统性能提高三个基本问题的研究 ,简述了应用研究 ,最后对自适应模糊控制的理论和应用进行了展望。 关键词模糊控制自适应控制鲁棒性稳定性 1 引言 自从 L. A. Zadeh提出模糊集合论以来 ,基于该理论形成一门新的模糊系统理论学科 ,在控制、信号处理、模式识别、通信等领域得到了广泛的应用。近年来 ,有关模糊控制理论及应用研究引起了学术界的极大兴趣 ,取得了一系列成功的应用和理论成果 ,与早期的模糊控制理论和应用相比有了很大的发展。模糊控制理论成为智能控制理论的一个重要分支。 一般来讲 ,模糊控制理论研究的核心问题在于如何解决模糊控制中关于稳定性和鲁棒性分析、系统的设计方法 (包括规则的获取和优化、隶属函数的选取等 )、控制系统的性能 (稳态精度、抖动及积分饱和度等 )的提高等问题 ,这己成为模糊控制研究中的几个公认的基本问题。其中 ,稳定性和鲁棒性问题的研究最为热烈 ,从早期基于模糊控制器的“多值继电器”等价模型的描述函数分析法 ,扩展到相平面法、关系矩阵分析法、圆判据、L yapunov稳定性理论、超稳定理论、基于滑模控制器的比较法、模糊穴 -穴映射及数值稳定性分析方法等非线性理论方法。设计方法的研究也倍受关注 ,主要表现在对规则的在线学习和优化、隶属函数参数的优化修正等应用了多种思想 ,如最优控制的二次型性能指标、自适应、神经网络、遗传算法等思想。稳态性能的改善一直是模糊控制学者所关注。 围绕上述几个基本问题 ,出现了多变量模糊控制[1 ,2 ] 、模糊神经网络技术 [3 ] 、神经模糊技术 [4 ] 、自适应模糊控制 [5] 、模糊系统辨识[6 ] 等热点研究领域。在模糊控制理论与应用方面 ,日本学者取得了很大的成就[7] ,我国学者在这方面也付出了不懈的努力 ,并取得了许多重要的成果。所有这些工作促进了模糊控制的理论和应用的快速发展。 本文拟对近几年自适应模糊控制几个基本问题的研究现状作一总结 ,希望能从这一侧面反映其研究情况和发展动向。主要内容包括 :( 1 )稳定性分析问题的研究 ;( 2 )系统设计方法的研究 ;( 3)系统性能提高的研 究 ;( 4 )应用研究情况。 2 稳定性分析 众所周知 ,任何一个自动控制系统 ,首先必须是稳定的 ,否则这个系统就无法工作。因此 ,在控制系统的分析和设计中 ,系统的稳定性研究占有重要的地位 ,模糊控制系统也是如此。由于模糊系统本质上的非线性和缺乏统一的系统描述 ,使得人们难以利用现有的控制理论和分析方法对模糊控制系统进行分析和 院系:控制系 姓名:刘锋 学号:M201071802 指导老师:关治洪 一、PID 控制器的设计 1. PID 线性控制器至今在控制系统的应用中占有统治地位[3]。这是因为PID 控制器结构简 单,使用方便,控制对象面广,在理论上有成熟的稳定性设计和参数整定方法,在工程应用中积累了丰富的实践经验。 PID 参数的整定方法很多,主要有Ziegler-Nichols 整定法,临界比例度法,衰减曲线法。 首先通过实验获取控制对象的单位阶跃响应,得到响应曲线如下: 可以看到单位阶跃响应曲线看起来不是一条S 形的曲线,所以不能用Ziegler-Nichols 方法来整定参数[1]。 考虑用临界比例度法,由于临界比例法要求系统的阶数是三阶或者三阶以上,所以不可以使用临界比例度法。 下面考虑衰减曲线法 用Simulink 搭建系统仿真图如下: 图2 断开积分微分后的阶跃响应 逐渐增大比例增益K ,观察示波器,直到响应系统的第一次超调量和第二次超调量之比为4:1时,记下此时的增益K 值,可以得到K=290时,比例度大约为4:1,此时比例度Ps =0.00345,T s =0.0067s. 图3 K=290时系统的响应 有经验公式[2], 表1 经验公式 计算得Kp=362, Ti=0.002s, Td =0.00067s. 将子系统的参数按上述修改,得到仿真图如下: 图4 t=1s 时,施加阶跃信号后的系统响应 可以看到PID 控制能达到很好的控制效果。 系统的整体框图设计如下: 图5 系统的整体框图 其中子系统设计如下 图6 子系统框图 t=0时刻起施加给定R=20,t=1s时刻起施加负载扰动LOAD=5得到系统的响应曲线如下: 图7 系统响应 可以看到用PID设计的控制器使系统响应速度较快,具有一定的抗负载扰动能力,最终得到的输出误差在2%之内。但是系统最终有微小的扰动,为了消除这种扰动,我们可以采取使PID微分环节含有死区,这样使微分项对于小信号不太敏感,以消除这种微小的扰动对控制器输出的影响。 一种递归模糊神经网络自适应控制方法 毛六平,王耀南,孙 炜,戴瑜兴 (湖南大学电气与信息工程学院,湖南长沙410082) 摘 要: 构造了一种递归模糊神经网络(RFNN ),该RFNN 利用递归神经网络实现模糊推理,并通过在网络的第 一层添加了反馈连接,使网络具有了动态信息处理能力.基于所设计的RFNN ,提出了一种自适应控制方案,在该控制方案中,采用了两个RFNN 分别用于对被控对象进行辨识和控制.将所提出的自适应控制方案应用于交流伺服系统,并给出了仿真实验结果,验证了所提方法的有效性. 关键词: 递归模糊神经网络;自适应控制;交流伺服中图分类号: TP183 文献标识码: A 文章编号: 037222112(2006)1222285203 An Adaptive Control Using Recurrent Fuzzy Neural Network M AO Liu 2ping ,W ANG Y ao 2nan ,S UN Wei ,DAI Y u 2xin (College o f Electrical and Information Engineering ,Hunan University ,Changsha ,Hunan 410082,China ) Abstract : A kind of recurrent fuzzy neural network (RFNN )is constructed ,in which ,recurrent neural network is used to re 2alize fuzzy inference temporal relations are embedded in the network by adding feedback connections on the first layer of the network.On the basis of the proposed RFNN ,an adaptive control scheme is proposed ,in which ,two proposed RFNNs are used to i 2dentify and control plant respectively.Simulation experiments are made by applying proposed adaptive control scheme on AC servo control problem to confirm its effectiveness. K ey words : recurrent fuzzy neural network ;adaptive control ;AC servo 1 引言 近年来,人们开始越来越多地将神经网络用于辨识和控 制动态系统[1~3].神经网络在信号的传播方向上,可以分为前馈神经网络和递归神经网络.前馈神经网络能够以任意精度逼近任意的连续函数,但是前馈神经网络是一个静态的映射,它不能反映动态的映射.尽管这个问题可以通过增加延时环节来解决,但是那样会使前馈神经网络增加大量的神经元来代表时域的动态响应.而且,由于前馈神经网络的权值修正与网络的内部信息无关,使得网络对函数的逼近效果过分依赖于训练数据的好坏.而另一方面,递归神经网络[4~7]能够很好地反映动态映射关系,并且能够存储网络的内部信息用于训练网络的权值.递归神经网络有一个内部的反馈环,它能够捕获系统的动态响应而不必在外部添加延时反馈环节.由于递归神经网络能够反映动态映射关系,它在处理参数漂移、强干扰、非线性、不确定性等问题时表现出了优异的性能.然而递归神经网络也有它的缺陷,和前馈神经网络一样,它的知识表达能力也很差,并且缺乏有效的构造方法来选择网络结构和确定神经元的参数. 递归模糊神经网络(RFNN )[8,9]是一种改进的递归神经网络,它利用递归网络来实现模糊推理,从而同时具有递归神经网络和模糊逻辑的优点.它不仅可以很好地反映动态映射关系,还具有定性知识表达的能力,可以用人类专家的语言控制规则来训练网络,并且使网络的内部知识具有明确的物理意 义,从而可以很容易地确定网络的结构和神经元的参数. 本文构造了一种RFNN ,在所设计的网络中,通过在网络的第一层加入反馈连接来存储暂态信息.基于该RFNN ,本文还提出了一种自适应控制方法,在该控制方法中,两个RFNN 被分别用于对被控对象进行辨识和控制.为了验证所提方法的有效性,本文将所提控制方法用于交流伺服系统的控制,并给出了仿真实验结果. 2 RFNN 的结构 所提RFNN 的结构如图1所示,网络包含n 个输入节点,对每个输入定义了m 个语言词集节点,另外有l 条控制规则 节点和p 个输出节点.用u (k )i 、O (k ) i 分别代表第k 层的第i 个节点的输入和输出,则网络内部的信号传递过程和各层之间的输入输出关系可以描述如下: 第一层:这一层的节点将输入变量引入网络.与以往国内外的研究不同,本文将反馈连接加入这一层中.第一层的输入输出关系可以描述为:O (1)i (k )=u (1)i (k )=x (1)i (k )+w (1)i (k )?O (1)i (k -1), i =1,…,n (1) 之所以将反馈连接加入这一层,是因为在以往的模糊神经网络控制器中,控制器往往是根据系统的误差及其对时间的导数来决定控制的行为,在第一层中加入暂态反馈环,则只需要以系统的误差作为网络的输入就可以反映这种关系,这样做不仅可以简化网络的结构,而且具有明显的物理意义,使 收稿日期:2005207201;修回日期:2006206218 基金项目:国家自然科学基金项目(N o.60075008);湖南省自然科学基金(N o.06JJ50121) 第12期2006年12月 电 子 学 报 ACT A E LECTRONICA SINICA V ol.34 N o.12 Dec. 2006 自适应神经网络(ANFIS)设计 5/29/2004 自适应神经网络模糊推理系统(ANFIS) (Adaptive Network-based Fuzzy Inference System) 第一篇 体会函数anfis函数中参数的含义. x=(0:0.1:10); %定义自变量x y=sin(2*x)./exp(x/5); %定义因变量y trnData=[x' y']; %训练学习的输入输出数据距阵 numMFs=5; %5条隶属度函数 mfType='gaussmf'; %采用高斯型隶属度函数,可以选择其他的形式来进行比较 epoch_n=2000; %训练的次数为2000次 in_fismat=genfis1(trnData,numMFs,mfType); %无冗余的系统 out_fismat=anfis(trnData,in_fismat,epoch_n); %训练输出 plot(x,y,'o',x,evalfis(x',out_fismat),'k'); %画图 legend('Training Data','ANFIS Output'); %显示原始数据和训练输出数据 训练图形 第二篇 在这个例子中,不但提供了训练数据,而且提供了效验数据,两种数据在输入空间均匀采样. 注:tic toc用来计算时间 numpts=51;%数据点个数为51 x1=linspace(-1,1,numpts)'; y=sin(pi*x1)+0.8*sin(3*pi*x1)+0.2*sin(5*pi*x1); data=[x1 y]; %整个数据集 trndata=data(1:2:numpts,:); %训练数据集 chkdata=data(2:2:numpts,:); %检验数据集 figure(1) plot(trndata(:,1),trndata(:,2),'o',chkdata(:,1),chkdata(:,2),'kx') %绘制训练数据集和检验数据集的分布曲线 legend('训练数据集','检验数据集'); %建立用于模糊建模的Sugeno型模糊推理系统 %采用genfis1函数直接由训练数据生成模糊推理系统 nummfs=5;%隶属度函数个数 mftypes='gaussmf';%隶属度函数类型 fismat=genfis1(trndata,nummfs,mftypes); %绘制模糊推理系统的初始隶属度函数 [x,mf]=plotmf(fismat,'input',1); figure(2) plot(x,mf) title('初始隶属度函数') 附图 训练数据和检验数据ANFIS的初始隶属度函数 模糊神经网络(备课笔记) 预备知识 复杂的东西是难以精确化的,这使得人们所需要的精确性和问题的复杂性间形成了尖锐的矛盾。 正如模糊数学的创始人L.A.Zadeh(查德)教授(美国加利福尼亚大学)所说:“当系统的复杂性增加时,我们使它精确化的能力将减小。直到达到一个阈值,一旦超越它,复杂性和精确性将相互排斥。”这就是著名的“互克性原理”。 该原理告诉我们,复杂性越高,有意义的精确化能力就越低;而复杂性意味着因素众多,以致人们往往不可能同时考察所有因素,只能把研究对象适当简化或抽象成模型,即抓住其中的主要部分而忽略掉次要部分。当在一个被压缩了的低维因素空间考虑问题时,即使本来是明确的概念,也会变得模糊起来。或者某些抽象简化模型本身就带有概念的不清晰,如“光滑铰链”这个力学模型,什么叫“光滑”、什么叫“粗糙”就没有一个明确的定义,客观上两者之间没有绝对分明的界限;主观上,决策者对此类非程序化决策做出判断时,主要是根据他的经验、能力和直观感觉等模糊概念进行决策的。 或者判断一个人的好坏,本来有很多因素,比如人品、性格、相貌等,现在简化改成一个综合评价:好、坏、一般等,都是根据个人爱好或者个人经验等模糊概念进行判断的。 在科学发展的今天,尤其在工程研究和设计领域中,这些模糊性问题就无法回避了,要求对数据进行定量分析,那如何对其进行定量分析呢? 1965年,Zadeh教授发表一篇论文“模糊集合”(Fuzzy sets),所谓模糊集合就是指边界不清的集合。提出用“隶属函数”(menbership function)这一概念来描述现象差异中的中间过渡,突破了德国人Cantor创立的古典集合论中属于或不属于的绝对关系,标志着模糊数学的诞生。Zadeh认为应该重新把模糊性和精确性统一在一起,因为在现实生活中复杂事物要绝对精确是不可能的,实际上只是把所谓的不准确程度降低到了无关重要的程度。他这篇论文第一次引人注目地提出了模糊性问题,给出了模糊概念的定量表示法,标志着模糊数学的诞生。模糊数学是使模糊现象定量化的应用数学分支学科。由于它突破了传统数学绝不允许模棱两可的约束,使那些与数学毫不相关的学科都可能用定量化和数学化加以描述和处理,从而显示其强大的生命力。 在模糊评价中,最基本和使用最多的是隶属度和隶属函数。隶属度表示元素u属于模糊集合U的程度;也就是对模糊集合的判断是用元素对此集合的从属程度大小来表达的。 模糊系统 模糊逻辑控制系统,简称模糊控制系统或模糊系统,是一种基于模糊数学理论的新型控制方法。 模糊控制由于模仿人对复杂事物的抽象思维方式,利用模糊信息处理对被控对象执行控制。所以,它不需要知道系统的精确数学模型。对不确定的非线性的系统来说是一种有效的控制途径。但是,模糊控制对信息的简单模糊化导致系统的控制精度下降。为了提高精度,往往要在模糊化时增加模糊量的个数,或者,增大控制规则集。这样会使控制规则搜索范围的扩大、搜索时间增加、降低了决策的速度,则影响了动态过程的品质。因此,隶属函数和控制规则的优化是提高品质的关键,在本质上,是对模糊控制中的知识进行正确性校正。前馈神经网络(FFNN)和自适应神经网络模糊推理系统(ANFIS)模型评价地下水位的对比研究
自适应模糊控制几个基本问题的研究进展
模糊控制器设计(含自适应)
一种递归模糊神经网络自适应控制方法
自适应神经网络ANFIS设计
模糊神经网络讲义
相关主题
文本预览