solidworks2014扭转弹簧运动仿真-丝竹工作室原创1、1、先定义装配,定义为同心装配,定义左右限位(尽可能用基准面装配),要能
活动不要定义死
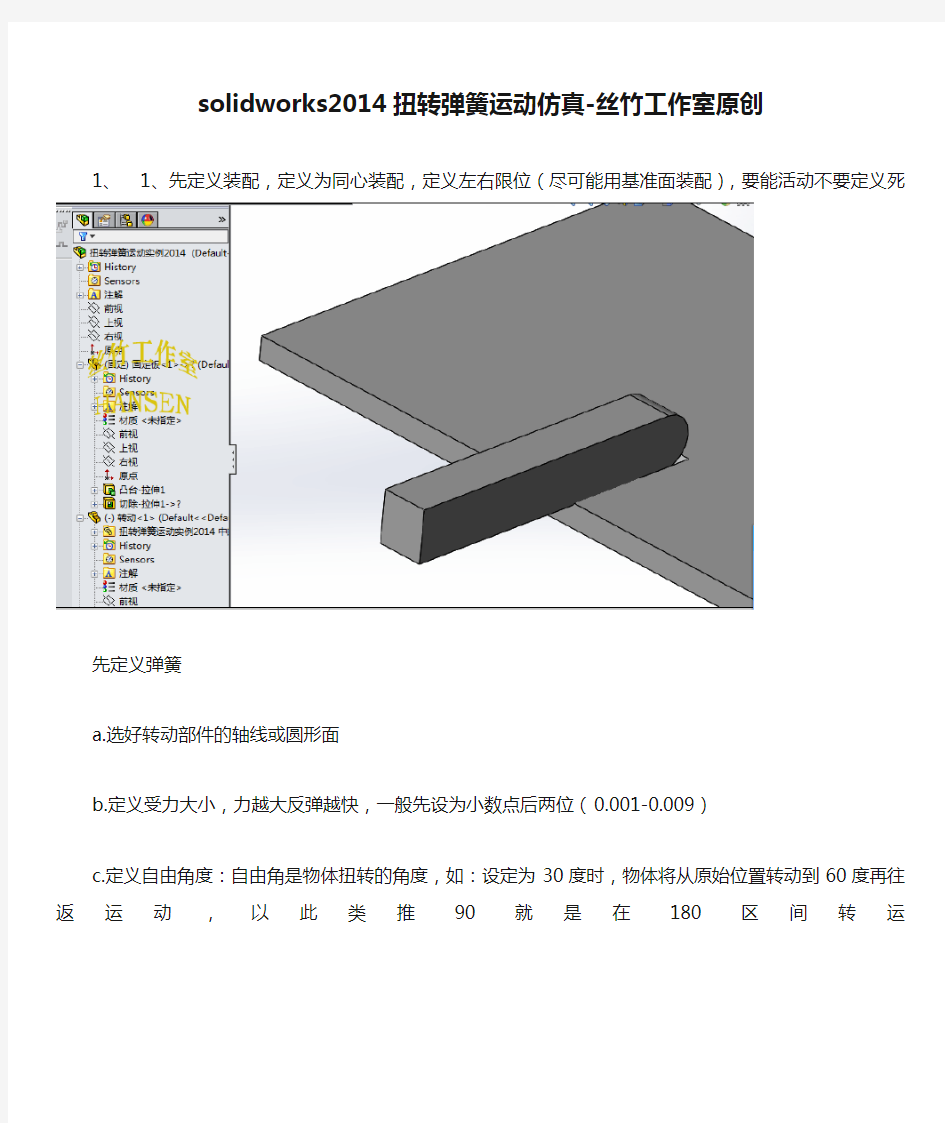
先定义弹簧
a.选好转动部件的轴线或圆形面
b.定义受力大小,力越大反弹越快,一般先设为小数点后两位(0.001-0.009)
c.定义自由角度:自由角是物体扭转的角度,如:设定为30度时,物体将从原始位置转动到60度再往返运动,以此类推90就是在180区间转运
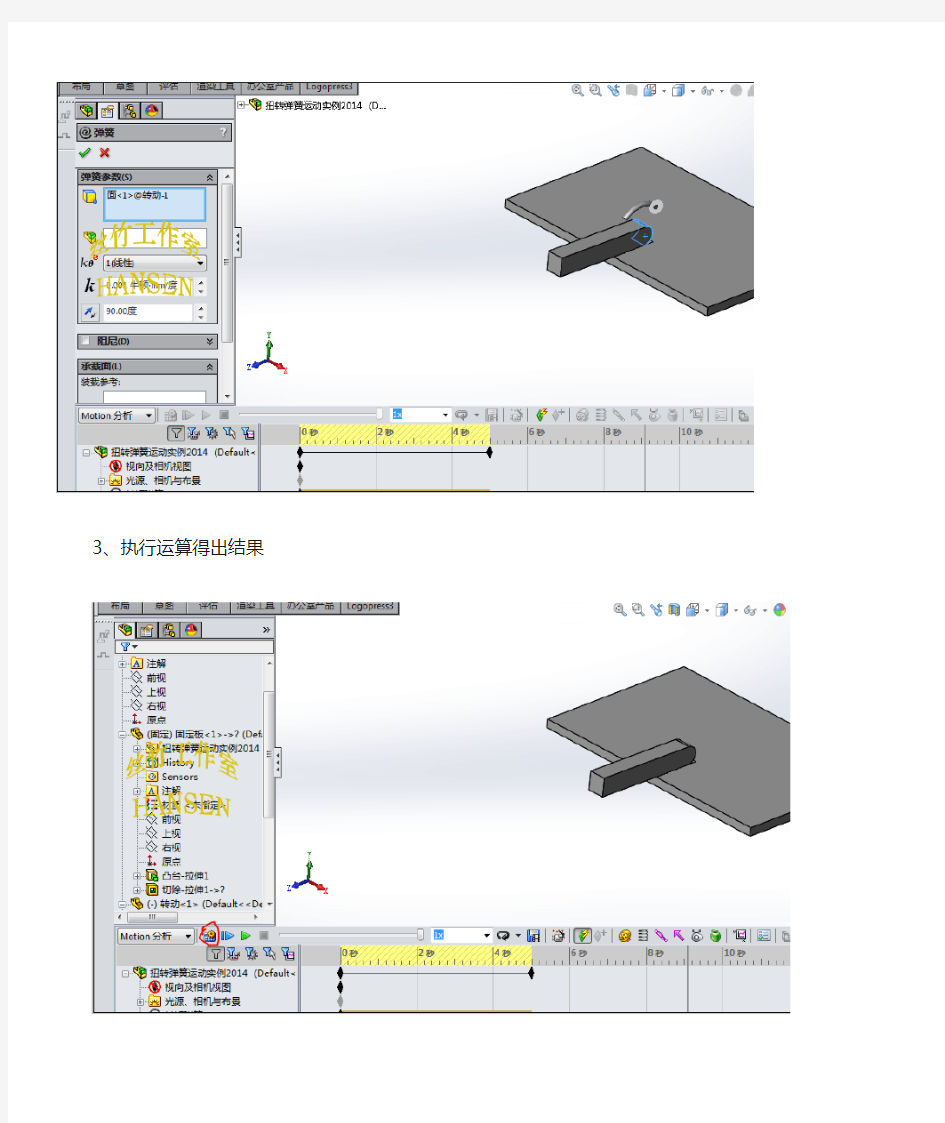
3、执行运算得出结果
前言 CATIA软件是法国达索飞机制造公司首先开发的。它具有强大的设计、分析、模拟加工制造、设备管理等功能。其设计工作台多达60多个,就足以说明软件功能的强大。 本书是作者在出版系列CATIA软件功能介绍后,专门针对某一项功能写的实例教程。在讲解示例的过程中,作者也注意了将某些快捷功能插入进来,进行讲解。比如在装配设计工作台对零件进行重新设计,比如在装配图中直接导入或者插入新的零件。在同类的图书中,很难涉及到这些快捷功能。 本书是基于CATIA V5 R16写成的,在完成本书时,已经有R17版本了,读者在更高的版本上也可以使用此书。读者在阅读本书,使用软件时,需要反复练习,才能熟练运用本书所讲解的一些功能。可以根据本书的步骤,做一些自己学习和工作中遇到的模型,也可以拿机械设计的标准件来做练习实例。 本书适合做机械设计的专业人员和机械相关专业的学生使用。本书也同样适合想学习CATIA软件的其他读者。本书前面20章都是讲解某一项铰的设计方法,最后一章是综合前面各章内容做的一个实例。本书编写过程中考虑到了初学者可能对CATIA机械零件设计的功能还不是很熟悉,因此,对于各章所涉及到的零件,模型建立方法都做了详细的介绍。对于已经熟悉CATIA基本设计功能的读者,可以略读这部分内容,直接阅读各章最后一节的内容。对于只想了解CATIA 机械零件设计的读者,可以仔细阅读每章前面各节的内容,把本书作为机械设计的详细教程,未尝不可。 感谢我的家人,他们给了我很大的支持,使我能抽出时间完成此书。感谢我的单位领导对工作的支持,特别是反应堆结构室的领导和各位同仁,他们的鼓励和帮助,使我坚持下来完成此书,并使我受益匪浅。 本书由盛选禹和盛选军主编。 冯志江老师参加了本书第1、第2、第3章的编写工作。王存福同志参加了第6、第7、第8章的编写工作 参加本书编写工作的还有张宏志,王玉洁,孙新城,盛选贵,曹京文、陈树青、王恩标、于伟谦、盛帅、候险峰、盛硕、陈永澎、盛博、曹睿馨、张继革、刘向芳、富晶、孟庆元、宗纪鸿、唐守琴。 由于时间比较仓促,认识水平有限等,不能避免有错误出现,读者在阅读时发现错误,请通知编者,不胜感激。也希望就CATIA软件的问题和广大读者继续探讨。作者联系电子邮件:xuanyu@https://www.doczj.com/doc/5c6165064.html,。 编者 2006年12月于北京
第16章 CATIA 运动分析 16.1 曲轴连杆运动分析 四缸发动机曲轴、连杆和活塞的运动分析是较复杂的机械运动。曲轴做旋转运动,连杆左做平动,活塞是直线往复运动。在用CATIA作曲轴、连杆和活塞的运动分析的步骤如下所示。 (1)设置曲轴、连杆、活塞及活塞销的运动连接。 (2)创建简易缸套机座。 (3)设置曲轴与机座、活塞与活塞缸套之间的运动连接。 (4)模拟仿真。 (5)运动分析。 16.1.1 定义曲轴、连杆、活塞及活塞销的运动连接 1.新建组文件 (1)点击“开始”选取“机械设计”中的“装配件设计”模块,如图16-1所示。 图16-1 进入“装配件设计”模块 (2)进入装配件设计模块后,点击添加现有组件图标,再点击模型树上的Product1图标,此时会出现文件选择对话框,按住Ctrl键,分别选取“Chapter16/huo-sai-xiao.CATPart、huo-sai.CATPart 、lianganzujian.CATproduct、quzhou.CATpart”,将这些零件体载入到Product1中。 (3)此时,零件体载入后重合到一起,点击分解图标,出现分解对话框如图16-2所示。然后点击模型树上的Product1,点击确定,此时弹出警告对话框,如图16-3所示,警告各零件的位置会发生变,点击警告对话框的按钮“是”,我们会发现各个零件分解开来。
图16-2 分解对话框 图16-3 警告对话框 (3)由于连杆体零件是装配体,各部分之间存在约束,点击“全部更新”按钮,我们会发现连杆体组件恢复装配后的样子。 (4)点击“约束”工具栏中的“相合约束”图标,分别选择活塞销中心线及活塞 孔中心线,如图16-4所示。然后点击“约束”工具栏中的“偏移约束”图标,选择活塞销的一个端面及活塞孔一侧的凹下去细环端面,如图16-5所示,此时出现“约束属性”对话框,如图16-6所示。将对话框中的“偏移”一栏改为“3.75mm”,点击“确定”按钮, 完成活塞销端面和活塞内凹孔细环端面之间的偏移约束关系。点击“全部更新”按钮,完成活塞与活塞销之间的约束,如图16-7所示。自此完成添加零部件工作。
《JTG D63-2007公路桥涵地基与基础设计规范》 桩基土弹簧计算方法 根据地基基础规范中给出的m法计算桩基的土弹簧: 基本公式: K=ab 1 mz ③ 式中: a:各土层厚度 b 1 :桩的计算宽度 m:地基土的比例系数 z:各土层中点距地面的距离 计算示例: 当基础在平行于外力作用方向由几个桩组成时, b1=0.9×k(d + 1) ① h1=3×(d+1) ∵ d=1.2 ∴ h1=6.6 L1=2m L1<0.6×h1=3.96M ∴ k=b′+((1-b′)/0.6)×L1/h1 ② 当n1=2时,b′=0.6 代入②式得:k= 当n1=3时,b′=0.5 代入②式得:k=0.92087542 当n1≥4时,b′=0.45 带入②式得:k=0.912962963 将k值带入①式可求得b1, 对于非岩石类地基,③式中m值可在规范表P.0.2-1中查到 对于岩石类地基,③式中m值可由下式求得: m=c/z 其中c值可在表P.0.2-2中查得 将a、b1、m、z带入③可求得K值 m 同时,《08抗震细则》,第6.3.8中规定,对于考虑地震作用的土弹簧, M 动=(2~3倍)M 静 。
桥梁的地震反应分析研究中,考虑桩-土共同作用时,在力学图式中作如下处理。 假定土介质是线弹性的连续介质,等代土弹簧刚度由土介质的动力m 值计算。“m -法”是我国公路桥梁设计中常用的桩基静力设计方法。在此采用的动力m 值最好以实测数据为依据。由地基比例系数的定义可表示为 z zx x z m ??=σ 式中,zx σ是土体对桩的横向抗力,z 为土层的深度,z x 为桩在深度z 处的横向位移(即该处土的横向变位值)。 由此,可求出等代土弹簧的刚度为s K z m b a x x z m b a x A x P K p z z p z zx z s s ???=????===)()(σ 式中,a 为土层的厚度,p b 为该土层在垂直于计算模型所在平面的方向上的宽度,m 值见表1。
弹簧弹力计算公式详解 压力弹簧、拉力弹簧、扭力弹簧是三种最为常见的弹簧,压力弹簧、拉力弹簧、扭力弹簧的弹力怎么计算,东莞市大朗广原弹簧制品厂为您详解,压力弹簧、拉力弹簧、扭力弹簧的弹力计算公式。 一、压力弹簧 ·压力弹簧的设计数据,除弹簧尺寸外,更需要计算出最大负荷及变位尺寸的负荷; ·弹簧常数:以k表示,当弹簧被压缩时,每增加1mm距离的负荷(kgf/mm); ·弹簧常数公式(单位:kgf/mm): G=线材的钢性模数:琴钢丝G=8000 ;不锈钢丝G=7300 ,磷青铜线G=4500 ,黄铜线G=3500 d=线径 Do=OD=外径 Di=ID=内径 Dm=MD=中径=Do-d N=总圈数 Nc=有效圈数=N-2 弹簧常数计算范例: 线径=2.0mm , 外径=22mm , 总圈数=5.5圈,钢丝材质=琴钢丝 二、拉力弹簧 拉力弹簧的k值与压力弹簧的计算公式相同 ·拉力弹簧的初张力:初张力等于适足拉开互相紧贴的弹簧并圈所需的力,初张力在弹
簧卷制成形后发生。拉力弹簧在制作时,因钢丝材质、线径、弹簧指数、静电、润滑油脂、热处理、电镀等不同,使得每个拉力弹簧初始拉力产生不平均的现象。所以安装各规格的拉力弹簧时,应预拉至各并圈之间稍为分开一些间距所需的力称为初张力。 ·初张力=P-(k×F1)=最大负荷-(弹簧常数×拉伸长度) 三、扭力弹簧 ·弹簧常数:以k 表示,当弹簧被扭转时,每增加1°扭转角的负荷(kgf/mm). ·弹簧常数公式(单位:kgf/mm): E=线材之钢性模数:琴钢丝E=21000 ,不锈钢丝E=19400 ,磷青铜线E=11200 ,黄铜线E=11200 d=线径 Do=OD=外径 Di=ID=内径 Dm=MD=中径=Do-d N=总圈数 R=负荷作用的力臂 p=3.1416
1.仿真之前的准备 将要仿真的模型所需的部件在装配模式下按照技术要求进行装配。装配时请注意,在能满足合理装配的前提下,尽量少用约束,以免造成约束之间互相干涉,影响下一步运动仿真。 2.运动仿真 通过“开始(S)”——“数字模拟”——“DMU Kinematics” 进入到运动仿真的模式下,开始进行仿真设置: (1)先建立一个新机制(New Mechanism);命令在“插入(I)” 菜单下, (2)对装配部件进行约束设置,命令在旋转铰里面,点击其图标右下方的箭头,点击后,出现所有铰定义图标 按顺序分别是:旋转铰(Revolute joint),棱镜铰(prismatic joint),圆柱铰(Cylinderical joint),螺纹铰(Screw joint),球铰(Spherical joint),平面滑动铰(Planner joint), 刚性连接(Rigid joint),点-线铰,滑动曲线铰,滚动曲线 铰,点-曲面铰,万向节铰,双万向节铰,齿轮铰,齿轮-齿条
铰,缆绳铰,坐标系铰。 各个铰接的的方法见文献《CATIA 机械运动分析与模拟实例》,上有很详细的介绍。 (3)设置固定件,点击固定零件图标,点击后出现New Fixed Part(新固定零件)对话框 ,不用理它,在图形区选择要固定的零件即可。 各种铰链设置合理,系统会自动提示: ,也就是说,机制可以仿真了。 (a.)仿真使用“命令模拟”时,点击,就会出现运动模拟对话框,在对话框内拖动鼠标,由大到小或有小到大改变角和实数的范围,然后点击下面的黑色开始键,就可以看到仿真运动了。对话框示例如下
C A T I A运动仿真 D M U 空间分析
CATIA运动仿真DMU空间分析 CATIA的DMU空间分析模块可以进行设计的有效性评价。它提供丰富的空间分析手段,包括产品干涉检查、剖面分析和3D几何尺寸比较等。它可以进行碰撞、间隙及接触等计算,并得到更为复杂和详尽的分析结果。它能够处理电子样机审核及产品总成过程中经常遇到的问题,能够对产品的整个生命周期(从设计到维护)进行考察。DMU空间分析能够处理任何规模的电子样车,它适用于从日用工具到重型机械行业的各种企业。
X.1 相关的图标菜单 CATIA V5的空间分析模块由一个图标菜单组成: 空间分析(DMU Space Analysis) Clash: 干涉检查 Sectioning: 剖面观察器 Distance and Band Analysis: 距离与自定义区域分析 Compare Products: 产品比较 Measure Between: 测量距离和角度 Measure Item: 单项测量 Arc through Three Points: 测量过三点的圆弧 Measure Inertia: 测量惯量 3D Annotation: 三维注释 Create an Annotated View: 建立注释视图 Managing Annotated Views: 管理注释视图 Groups: 定义产品组 x.2 空间分析模块的环境参数设定 在开始使用CATIA V5的空间分析模块前,我们可以根据自身的习惯特点,合理地设定其环境参数。在菜单栏中使用下拉菜单Tools→Option→Digital Mockup打开DMU Space Analysis的环境参数设定界面,在此窗口中有六个标签,分别对应不同的参数设定。 x.2.1 干涉检查设置(DMU Clash)
产品研发一部 底盘室:马学超 题目:基于CATIA运动仿真案列解析
DMU DMU—案例讲析 ?1、运动分析证明带夹角十字轴不等速性运动分析证明带夹角十字轴不等速性 及、三轴平行的等速性; 及一、三轴平行的等速性; 2、绘制单前桥转向的实际转向特性曲线; 单桥转向实转向特性曲线 3、扫掠包络体和运动间隙、干涉校核;
DMU—案例讲析 DMU ?案例一:运动分析证明带夹角十字轴不等速性 及一、三轴平行的等速性
DMU—案例讲析 DMU 本案例以通用结合为基础,先做运动仿真,模型如下;仿真步骤就不再赘述在蓝色零件和灰色零件之间的 旋转结合设置驱动角度,其余 两个设为从动件;由右下图 的十字销轴线方向可以 的“十字销轴线方向”可以 看出通用结合是在两个旋转 结合之间用默认的十字轴或是万向节 接所以可以看成是传动轴间的动; 连接,所以可以看成是传动轴之间的运动;
DMU DMU— 案例讲析 设置完成之后,点击(使用命令进行 模拟)按钮,弹出如下图1所示窗口,并 点击“激活传感器”,弹出如下图2所示 窗口,依次将窗口中的三个旋转结合的 传感器打开,“观察到”下方的“否” 图1全部变为了“是”;此时用鼠标在图1 中拖动滚动条到个极限位置然后选 中拖动滚动条到一个极限位置,然后选 择“按需要”,并点击 让其旋转两周; 图2
DMU—案例讲析 DMU 旋转过两周之后,点击“传感器”窗口中的“图形” 按钮,系统便会自动弹出 如下图1所示窗口,图中 左边窗口表示三个旋转 结合的运动曲线图,横 坐标表示步骤数,纵坐 标表示瞬时角度值; 图1
假设两根弹簧1、2,劲度系数为K1,K2; 1、串联时:假设弹簧受拉力F,则,1伸长L1=F/K1,2伸长L2=F/K2,则总伸长L=(F/K1+F/K2),新的劲度系数为K=F/L=1/(1/K1+1/K2); 2、并联时:假设两根弹簧都伸长L,则,受力F=K1*L+K2*L,新的劲度系数K=F/L=K1+K2. 对于多跟弹簧,最后也类似,就和电阻的串并联正好相反。 对弹簧,串联的劲度系数的倒数等于个跟弹簧劲度系数的倒数和; 并联的劲度系数等于个跟弹簧劲度系数的和。 应当说,对于材料相同、尺寸(不包括长度,只是指弹簧丝直径、弹簧截面半径、弹簧螺距等参量)相同的弹簧,劲度系数与长度成反比。 参加物理竞赛的话你会学到弹簧串,并联的等效劲度系数的公式,设2弹簧 弹性系数分别为k1和k2 当他们串联时,等效弹性系数为k1*k2/k1+k2; 当他们并联时,等效弹性系数为k1+k2。 你可以发现,这个公式正好与等效电阻的串并联关系相反。 推导过程仍然是按照定义,找出等效弹簧组的k,也就是N=k△x中的k。
先来推导串联的,串联时,设2个弹簧的弹性系数分别为k1,k2,他们的伸长量分别是△x1和△x2,那么有关系:△x=△x1+△x2,而同一根绳子上的张力相等,也就是说2个弹簧中的张力相等,即有:T=k1*△x1=k2*△x2。联立3式,可解出T=(k1*k2/k1+k2)△x,括号里就是等效的k。 并联的很简单,略。。 再次补充并联! 仍然设2个弹簧的弹性系数分别为k1,k2,但并联时2弹簧伸长量相同而各自张力不同,并联弹簧组两边的总拉力为2弹簧拉力之和,根据这个关系可得:T=(k1+k2)*△x,所以等效弹性系数k就是k1+k2了
弹簧刚度计算 压力弹簧 · 压力弹簧的设计数据,除弹簧尺寸外,更需要计算出最大负荷及变位尺寸的负荷; · 弹簧常数:以k表示,当弹簧被压缩时,每增加1mm距离的负荷(kgf/mm); · 弹簧常数公式(单位:kgf/mm): G=线材的钢性模数:碳钢丝G=79300 ;不锈钢丝G=697300,磷青铜线G=4500 ,黄铜线G=350 d=线径 Do=OD=外径 Di=ID=内径 Dm=MD=中径=Do-d N=总圈数 Nc=有效圈数=N-2 拉力弹簧 拉力弹簧的 k值与压力弹簧的计算公式相同 ·拉力弹簧的初张力:初张力等于适足拉开互相紧贴的弹簧并圈所需的力,初张力在弹簧卷制成形后发生。拉力弹簧在制作时,因钢丝材质、线径、弹簧指数、静电、润滑油脂、热处理、电镀等不同,使得每个拉力弹簧初始拉力产生不平均的现象。所以安装各规格的拉力弹簧时,应预拉至各并圈之间稍为分开一些间距所需的力称为初张力。
· 初张力=P-(k×F1)=最大负荷-(弹簧常数×拉伸长度) · 拉力弹簧的设计数据,除弹簧尺寸外,更需要计算出最大负荷及变位尺寸的负荷; · 弹簧常数:以k表示,当弹簧被拉伸时,每增加1mm距离的负荷(kgf/mm); · 弹簧常数公式(单位:kgf/mm): G=线材的钢性模数:碳钢丝G=79300 ;不锈钢丝G=697300,磷青铜线G=4500 ,黄铜线G=350 d=线径 Do=OD=外径 Di=ID=内径 Dm=MD=中径=Do-d N=总圈数 扭力弹簧 · 弹簧常数:以 k 表示,当弹簧被扭转时,每增加1°扭转角的负荷 (kgf/mm). · 弹簧常数公式(单位:kgf/mm): E=线材之钢性模数:琴钢丝E=21000 ,不锈钢丝E=19400 ,磷青铜线E=11200,黄铜线E=11200 d=线径 Do=OD=外径 Di=ID=内径 Dm=MD=中径=Do-d N=总圈数
弹簧国家标准一览 中国的弹簧标准化工作始于60年代初期,至今已40多年历史,已经形成了较为完善的标准体系,目前已有弹簧国家标准22项、行业标准30项。1999年由国家质检总局批准成立全国弹簧标准化技术委员会(SAC/TC235),弹簧标准化工作得以全面推进。2004年国际上成立了ISO/TC 227(弹簧),我国以成员身份参与工作,这标志着中国弹簧标准化工作进入了新的阶段,即;全面跟踪、实质性参与工作阶段。 -------------------------------------弹簧标准目录: GB/T 1239.2-1989 冷卷圆柱螺旋压缩弹簧技术条件 GB/T 1239.3-1989 冷卷圆柱螺旋扭转弹簧技术条件 GB/T 1239.4-1989 热卷圆柱螺旋弹簧技术条件 GB/T 1239.6-1989 圆柱螺旋弹簧设计计算 GB/T 1973.1-1989 小型圆柱螺旋弹簧技术条件 GB/T 1973.2-1989 小型圆柱螺旋拉伸弹簧尺寸及参数 GB/T 1973.3-1989 小型圆柱螺旋压缩弹簧尺寸及参数 GB/T 2087-2001 圆柱螺旋拉伸弹尺寸及参数(半圆钩环型) GB/T 2088-1997 圆柱螺旋拉伸弹(圆钩环压中心型)尺寸及参数 GB/T 2089-1994 圆柱螺旋压缩弹簧(两端并紧磨平或锻平型)尺寸及参数 GB/T 4142-2001 圆柱螺旋拉伸弹尺寸及参数(圆钩环型) GB/T 2785-1988 内燃机气门弹簧技术条件 GB/T 2940-1982 柴油机用喷油泵、调速器、喷油器弹簧技术条件 GB/T 4036-1983 手表发条 GB/T 4037-1983 手表游丝
CATIA运动仿真小教程 1. 仿真之前的准备 将要仿真的模型所需的部件在装配模式下按照技术要求进行装配。装配时请注意,在能满足合理装配的前提下,尽量少用约束,以免造成约束之间互相干涉,影响下一步运动仿真。 2.运动仿真 通过“开始(S)”——“数字模拟”——“DMU Kinematics” 进入到运动仿真的模式下,开始进行仿真设置: (1)先建立一个新机制(New Mechanism);命令在“插入(I)”菜单下, (2)对装配部件进行约束设置,命令在旋转铰里面,点击其图标右下方的箭头,点击后,出现所有铰定义图标 按顺序分别是:旋转铰(Revolute joint),棱镜铰(prismatic joint),圆柱铰(Cylinderical joint),螺纹铰(Screw joint),球铰(Spherical joint),平面滑动铰(Planner joint),刚性连接(Rigid joint),点-线铰,滑动曲线铰,滚动曲线铰,点-曲面铰,万向节铰,双万向节铰,齿轮铰,齿轮-齿条铰,缆绳铰,坐标系铰。 各个铰接的的方法见文献《CATIA 机械运动分析与模拟实例》,上有很详细的介绍。 (3)设置固定件,点击固定零件图标,点击后出现New Fixed Part(新固定零件)对话框 ,不用理它,在图形区选择要固定的零件即可。 各种铰链设置合理,系统会自动提示:
,也就是说,机制可以仿真了。 (a.)仿真使用“命令模拟”时,点击,就会出现运动模拟对话框,在对话框内拖动鼠标,由大到小或有小到大改变角和实数的范围,然后点击下面的黑色开始键,就可以看到仿真运动了。对话框示例如下 (b.)仿真采用“模拟”时,点击,即可进入 和
弹簧弹力计算公式 Revised by Liu Jing on January 12, 2021
弹力计算公式 压力弹簧 初拉力计算 F0=〖{π3.14×d3}÷(8×D)〗×79mpa F0={3.14×(5×5×5)÷(8×33)}×79=117 kgf 1.压力弹簧的设计数据,除弹簧尺寸外,更需要计算出最大负荷及变位尺寸的 负荷; 2.弹簧常数:以k表示,当弹簧被压缩时,每增加1mm距离的负荷(kgf/mm); 3.弹簧常数公式(单位:kgf/mm); K=(G×d4)/(8×D3×Nc) G=线材的钢性模数:琴钢丝G=8000 ;不锈钢丝G=7300 ,60Si2MnA钢丝 G=7900,磷青铜线G=4500 ,黄铜线G=3500 d=线径(钢丝直径) D=中径 N=总圈数 Nc=有效圈数 F=运动行程(550mm) 弹簧常数计算范例: 线径=5.0mm , 中径=20mm , 有效圈数=9.5圈 ,钢丝材质=不锈钢丝 K=(G×d4)/(8×D3×Nc)=(7900×54)/(8×203×9.5)=8.12kgf/mm×(F=100)=812 kgf 拉力弹簧
拉力弹簧的初张力:初张力等于适足拉开互相紧贴的弹簧并圈所需的力,初张力在弹簧卷制成形后发生。拉力弹簧在制作时,因钢丝材质、线径、弹簧指数、静电、润滑油脂、热处理、电镀等不同,使得每个拉力弹簧初始拉力产生不平均的现象。所以安装各规格的拉力弹簧时,应预拉至各并圈之间稍为分开一些间距所需的力称为初张力。 初张力=P-(k×F1)=最大负荷-(弹簧常数×拉伸长度) 扭力弹簧 弹簧常数:以 k 表示,当弹簧被扭转时,每增加1°扭转角的负荷 (kgf/mm) 弹簧常数公式(单位:kgf/mm): K=(E×d4)/(1167×D×p×N×R) E=线材之钢性模数:琴钢丝E=21000 ,不锈钢丝E=19400 ,磷青铜线 E=11200 , 黄铜线E=11200 d=线径(钢丝直径) D=中径 N=总圈数 R=负荷作用的力臂 p=3.1416
Catia链轮链条仿真运动教程 Panyf Catia DMU 运动机构分析——链条链轮运动仿真 网上关于catia做柔性零件的运动仿真的资料比较少,(也许我没找到吧) 链条的模拟有看到过,但是都是单独做链条的模拟,没有加上链轮的一起仿真的。下面做个链条与链轮一起运动的仿真教程,希望对不会的朋友有有些帮助。(做的不好也请见谅) (以下用两个链轮做例子) 首先确定所用链轮的参数——节距,滚子直径,齿数z1.z2。 确定链条的运动轨迹。将两链轮的分度圆定位好, 然后用各种线条连接成自己需要的运动轨迹。
1、如果只需要几节链条的模拟,那么只需在运动轨迹绘制几个点,(轨迹上的点与滚子中心点相合)每两个点之间的距离为所选链轮参数中的节距。这里强调一下,这里的距离是指两点间的直线距离。 2、如果需要安装整条链条,那就需要将整条运动轨迹标以节距为间距标注好n 个点,确保相邻两点间距为节距。(这里说一下,由于之前两链轮已经约束了,所有点都约束后会出现过分约束, 可以将其中一个链轮的其中一个约束去掉或者改为参考,比如将图中的103.165
删除或者,这样就可以确保每个点之间的距离都为节距) 制作好单节链条,一个内挡板,一个外挡板
,两点为滚子中心,距离等于节距。(我做的比较简单,只是个样子,把滚子和内挡板做一块了) 进入装配设计,导入各个零件。将链条一内一外安装在轨迹上的点上,最后头尾相接。安装好链轮。如图所示 这里提醒下,做链条模拟每个链节都是独立的,都要进行接合定义,举个例子,如果你的整个链条由50节链节(即50个滚子)组成,那么你就得定义51个点曲线接合,49个旋转接合。选的越多接合越多,如果你电脑牛X,那可以选多点,如果电脑一般,就尽量少点吧。 进入DMU 运动机构建立各种接合。 首先选择固定件,把运动轨迹做为固定件。 选平面接合。选择内挡板与运动轨迹相合的两个面
实验弹簧劲度系数的测量 弹簧是一种利用弹性来工作的机械零件。用弹性材料制成的零件在外力作用下发生形变,除去外力后又恢复原状。一般用弹簧钢制成,弹簧的种类复杂多样。弹簧是个蓄能器,它有储存能量的功能,但不能慢慢地把能量释放出来,要实现慢慢释放这一功能应该靠“弹簧+大传动比机构”实现,常见于机械表。古代的弓和弩是两种广义上的弹簧。英国科学家胡克提出了“胡克定律”——弹簧的伸长量与所受的力的大小成正比,根据这一原理,1776年,使用螺旋压缩弹簧的弹簧秤问世。不久,根据这一原理制作的专供钟表使用的弹簧也被虎克本人发明出来。而符合“胡克定律”的弹簧才是真正意义上的弹簧。 【实验目的】 1、验证胡克定律。 2、掌握用静态拉伸法、动态谐振法测量弹簧的劲度系数。 3、加深对简谐振动中机械能守恒定律的理解。 【实验仪器】 计算机(含Datastudio软件)、PACSO物理实验组合仪(力传感器、运动传感器)、架子、弹簧若干、砝码若干、数据采集接口器。 【实验原理】 1、静态拉伸法 在竖直的弹簧下端悬挂一质量为m的砝码,当砝码平衡时,弹簧的回复力F与砝码的重力mg大小相等: (1) 随着砝码质量的逐渐增大,弹簧伸长量也逐渐增大。根据胡克定律,在不计弹簧质量的前提下,弹簧的回复力F与砝码的位移量x之间的关系为: (2) 其中k为弹簧劲度系数。则 (3) 通过作图和直线拟合,求出弹簧的劲度系数。 2、动态谐振法 在竖直的弹簧下端悬挂一质量为m的砝码,沿弹簧竖直方向加一适当的外力。当外力撤销后,弹簧在回复力的作用下开始做谐振运动。振动过程中,能量在动能和势能之间相互转换。在不计弹簧质量和弹簧摩擦力的前提下,系统总能量守恒。 根据牛顿第二定律,不计弹簧质量时,系统的运动方程为: (4) 则
应用CATIA做运动仿真,按如下步骤做: 1. 仿真之前的准备 将要仿真的模型所需的部件在装配模式下按照技术要求进行装配。装配时请注意,在能满足合理装配的前提下,尽量少用约束,以免造成约束之间互相干涉,影响下一步运动仿真。2. 运动仿真 通过“开始(S)”——“数字模拟”——“DMU Kinematics” 进入到运动仿真的模式下,开始进行仿真设置: (1)先建立一个新机制(New Mechanism);命令在“插入(I)”菜单下, (2)对装配部件进行约束设置,命令在旋转铰里面,点击其图标右下方的箭头,点击后,出现所有铰定义图标 按顺序分别是:旋转铰(Revolute joint),棱镜铰(prismatic joint),圆柱铰(Cylinderical joint),螺纹铰(Screw joint),球铰(Spherical joint),平面滑动铰(Planner joint),刚性连接(Rigid joint),点-线铰,滑动曲线铰,滚动曲线铰,点-曲面铰,万向节铰,双万向节铰,齿轮铰,齿轮-齿条铰,缆绳铰,坐标系铰。 各个铰接的的方法见文献《CATIA 机械运动分析与模拟实例》,上有很详细的介绍。 (3)设置固定件,点击固定零件图标,点击后出现New Fixed Part(新固定零件)对话框 ,不用理它,在图形区选择要固定的零件即可。 各种铰链设置合理,系统会自动提示:
,也就是说,机制可以仿真了。 (a.)仿真使用“命令模拟”时,点击,就会出现运动模拟对话框,在对话框内拖动鼠标,由大到小或有小到大改变角和实数的范围,然后点击下面的黑色开始键,就可以看到仿真运动了。对话框示例如下 (b.)仿真采用“模拟”时,点击,即可进入 和
普通圆柱螺旋扭转弹簧工学设计 圆柱螺旋扭转弹簧有关参数标准选用范围 PA0006.0 Q/AD 旋绕比C 一般按下述范围选取:热卷弹簧4~10; 冷卷弹簧4~14 超出此选取范 围难制作 旋绕4 4.1 4.2 4.3 4.4 4.5 4.6 4.7 4.8 4.9 5 5.2 5.5 5.6 5.8 比C 曲度 系数1.25 1.2 1.19 1.17 旋绕比K1 比C旋绕与曲6 6.2 6.4 6.5 6.6 6.8 7 7.2 7.4 7.5 7.6 7.8 8 8.5 9 比C 度系曲度数比系数1.15 1.14 1.13 1.12 1.11 1.1 1.09 K1对比K1 应关旋绕系 9.5 10 11 12 14 比C 曲度 系数1.09 1.08 1.07 1.06 比K1 旋绕比C与曲 度系数比K1计C=D/d, K1=(4C-1)/(4C-4) 算关系 弹簧直 径d规定 范围0.1, 0.15, 0.2, 0.25, 0.3, 0.35, 0.4, 0.45, 0.5, 0.6, 0.8, 1, 1.2, 1.6, 2, 2.5, 3, 3.5 4, 4.5, 5, 6, 8, 10, 12, 16, 20, 25, 30, 35, 40, 45, 50, 60, 70, 80(第一系列) (GB1358 -78) A0.3, 0.5, 0.8, 类
弹簧直B1/3d=(10MnK1/[σ] ) Mn为最大工作扭矩, BP类径d选用弹簧直径 d计算公式0.2, 0.4, 0.6 , 1 [σBP]为弹簧许用弯曲应力, 标准除A类,B类以外所有在弹簧C尺直径d规定范围(GB1358-78)类寸之内的数值参弹簧中数 径D规0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 1, 1.2, 1.6, 2, 2.5, 3, 3.5, 4, 4.5, 5, 6, 7, 8, 9, 10, 12, 16, 20, 25, 30, 35, 40, 45, 50, 55, 60, 70, 80, 90, 100, 110, 定范围120, 130, 140, 150, 160, 200, 220, 240, 260, 280, 300, 320, 360, 400(第一系列) (GB1358 -78) A2, 4, 6, 8, 10, 12, 16, 20 类弹簧中B弹簧中径D径D选D=D2-d, D2为 弹簧外径 3, 5, 7, 9 类计算公式用标准 C除A类,B类以外所有在弹簧中径D规定范围 类 (GB1358-78)之内的数值 A材料选用标准 65Mn(碳素弹簧钢丝) 类 B65Mn(琴钢丝) ,黄铜H62 类 C ,,,等 1Cr18Ni9 55Si2MnQSn3-1QBe2类 A 类镀镍(热处理RHC45~50) B表面处理类镀白锌(热处理RHC45~50) C 类发兰,,发黑,镀彩锌(热处理RHC45~50) 标记示例:215000系列产品扭转弹 簧d=0.5,D=8,H0=15,n=5,β=120?,材料为65Mn,表面镀镍:扭转弹簧 215000 65Mn 镀镍(0.5*8*15*5 β=120?) 弹簧类别产品编号材料表面处理主要尺寸参数(d*D*H0*n β=) 备注
众泰控股集团有限公司企业标准 Q/CS 发布Q/CS 05.010-2013 行李箱扭簧设计计算方法 2013-02-28实施 2013-02-25发布
Q/CS 05.010-2013 前言 本标准由众泰汽车工程研究院车身部提出。 本标准由众泰汽车工程研究院车身部归口管理。 本标准由众泰汽车工程研究院车身部负责起草。 本标准主要起草人:綦法富。
行李箱扭簧设计计算方法 1 范围 本标准规定了行李箱扭簧的技术要求、试验方法和计算方法。 本标准适用于三厢车鹅颈式(弓形)铰链所配用的行李箱扭簧产品。 2 引用标准 下列文件中对于本文件的应用是必不可少的。凡是注日期的引用文件,仅注日期的版本适用于本文件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。 GB/T 230.1-2009金属材料洛氏硬度试验第1部分:试验方法 GB/T 1222-2007 弹簧钢 GB/T 1805-2001 弹簧术语 GB/T 18983-2003 油淬火回火弹簧钢丝 Q/ZTB 06.002-2012 乘用车零部件防腐技术要求 Q/ZTB 07.025-2012 禁用和限用物质规范 3术语和定义 3.1 行李箱扭簧 作为平衡铰链的弹性元件之一,占有有效空间小,易于安装,是一种较好的结构型式。其工作原理是通过扭转产生弹性变形输出力矩。 3.2 鹅颈式(弓形)铰链 鹅颈式(弓形)铰链是使用弹性元件,可以在行李箱盖开启或关闭过程中平衡行李箱盖重力矩的铰链结构,因其形状类似于鹅颈而得名。该铰链形式结构简单、制造工艺容易、有足够强度、可靠耐久及成本较低等优点,目前在中低档三厢车型中广泛应用。 3.3 剪切弹性模量(G) 材料的力学性能指标之一,是材料在纯剪切应力状态下,应力低于比例极限时切应力与切应变的比值。它代表着材料抵抗切应变的能力,模量大,则表示材料的刚性强。目前几种常用的扭簧材料剪切弹性模量见表1所示。
CATIA数字样机仿真机构分析 CA TIA数字样机仿真机构分析 (1) 绪论 (2) 细节分析 (3) 运动仿真的流程 (4) 相关概念 (5) 重点——理解各运动副的概念和创建要素 (7) 基本运行与位置调整 (10) 基于运动函数的模拟 (10) 综合模拟 (11) 序列编辑与重放 (13) 基于运动仿真的数字样机分析 (14) 运动副运动规律的查看与保存 (15) 运动参数测量 (15) 机构运动轨迹分析 (16) 扫掠包络体 (17) 空间分析 (18)
绪论 相对于物理样机,数字样机的优点不言而喻,在很大程度上可以代替物理样机的作用,随着数字样机技术的发展和日益成熟,今后会在更大的程度和更多的方面取代物理样机,提高产品的研发效率和技术水平。 学习Catia数字样机需要掌握主要几大块内容: 1、工作窗口的构成和功能 2、运动仿真流程的掌握 3、各种运动副的运用 4、基本运动学原理的掌握 5、仿真机构的运行与重放 6、基于运动仿真的数字样机分析技术
细节分析 该模块位置:CATIA→Digital Mock Up→DMU kinematics 工具栏主要:有DMU运动机构 DMU一般动画 运动机构更新以及DMU空间分析四大块。 各工具按钮的作用需要在实践操作中一步步掌握和数字,非一朝一夕的功夫可以消化,其基本功能都是相对简单的,但是要综合运用,必须勤加练习细细领悟。
运动仿真的流程 3D数字模型→数字样机准备→静态装配(包括全面静态装配后删除限制运动的约束后自动创建运动副、全面静态装配后通过对话框利用相关约束手动创建运动副)或者直接手动创建运动副→所有必要基础运动副创建完成→分析是否需要建立关联运动副并创建→定于仿真过程中的固定件(机械装置自由度DOF变为1)→施加驱动&制定运动法则(直到机械装置自由度DOF为0)→运动模拟与分析。
. 弹簧刚度计算压力弹簧 压力弹簧的设计数据,除弹簧尺寸外,更需要计算出最大负荷及变位尺寸的负荷;·;距离的负荷(kgf/mm) ·弹簧常数:以k表示,当弹簧被压缩时,每增加 1mm ):·弹簧常数公式(单位:kgf/mm G=350 黄铜线,,磷青铜线G=4500 G=697300 碳钢丝G=线材的钢性模数:G=79300 ;不锈钢丝线径d= Do=OD=外径Di=ID=内径=Do-d 中径 Dm=MD= 总圈数N==N-2 Nc=有效圈数拉力弹簧 值与压力弹簧的计算公式相同拉力弹簧的k拉力弹簧的初张力:初张力等于适足拉开互相紧贴的弹簧并圈所需的力,初张力在弹簧卷制成· 形后发生。拉力弹簧在制作时,因钢丝材质、线径、弹簧指数、静电、润滑油脂、热处理、电镀等不同,使得每个拉力弹簧初始拉力产生不平均的现象。所以安装各规格的拉力弹簧时,应预拉至各并圈之间稍为分开一些间距所需的力称为初张力。1 / 3 . ×拉伸长度)-(k×F1)=最大负荷(弹簧常数初张力·=P-拉力弹簧的设计数据,除弹簧尺寸外,更需要计算出最大负荷及变位尺寸的负荷;·;(kgf/mm) 弹簧常数:以k表示,当弹簧被拉伸时,每增加1mm距离的负荷·:·弹簧常数公式 (单位:kgf/mm) G=350 黄铜线磷青铜线G=4500 ,不锈钢丝G=线材的钢性模数:碳钢丝G=79300 ;G=697300 ,线径d= 外径Do=OD= 内径Di=ID==Do-d Dm=MD=中径N=总圈数扭力弹簧
(kgf/mm). 扭转角的负荷,当弹簧被扭转时,每增加1°表示·弹簧常数:以k : 弹簧常数公式(单位:kgf/mm)· E=11200 琴钢丝E=21000 ,不锈钢丝,黄铜线E=19400 ,磷青铜线E=11200线材之钢性模数:E= d=线径Do=OD=外径Di=ID=内径=Do-d Dm=MD=中径N=总圈数2 / 3 . 负荷作用的力臂R= p=3.1416 3 / 3
拉压扭簧计算公式弹簧 刚度计算 Document number【SA80SAB-SAA9SYT-SAATC-SA6UT-SA18】
弹簧刚度计算 压力弹簧 · 压力弹簧的设计数据,除弹簧尺寸外,更需要计算出最大负荷及变位尺寸的负荷; · 弹簧常数:以k表示,当弹簧被压缩时,每增加1mm距离的负荷(kgf/mm); · 弹簧常数公式(单位:kgf/mm): G=线材的钢性模数:碳钢丝G=79300 ;不锈钢丝G=697300,磷青铜线G=4500 ,黄铜线G=350 d=线径 Do=OD=外径 Di=ID=内径 Dm=MD=中径=Do-d N=总圈数 Nc=有效圈数=N-2 拉力弹簧 拉力弹簧的 k值与压力弹簧的计算公式相同 ·拉力弹簧的初张力:初张力等于适足拉开互相紧贴的弹簧并圈所需的力,初张力在弹簧卷制成形后发生。拉力弹簧在制作时,因钢丝材质、线径、弹簧指数、静电、润滑油脂、热处理、电镀等不同,使得每个拉力弹簧初始拉力产生不平均的现象。所以安装各规格的拉力弹簧时,应预拉至各并圈之间稍为分开一些间距所需的力称为初张力。
· 初张力=P-(k×F1)=最大负荷-(弹簧常数×拉伸长度) · 拉力弹簧的设计数据,除弹簧尺寸外,更需要计算出最大负荷及变位尺寸的负荷; · 弹簧常数:以k表示,当弹簧被拉伸时,每增加1mm距离的负荷(kgf/mm); · 弹簧常数公式(单位:kgf/mm): G=线材的钢性模数:碳钢丝G=79300 ;不锈钢丝G=697300,磷青铜线G=4500 ,黄铜线G=350 d=线径 Do=OD=外径 Di=ID=内径 Dm=MD=中径=Do-d N=总圈数 扭力弹簧 · 弹簧常数:以 k 表示,当弹簧被扭转时,每增加1°扭转角的负荷 (kgf/mm). · 弹簧常数公式(单位:kgf/mm): E=线材之钢性模数:琴钢丝E=21000 ,不锈钢丝E=19400 ,磷青铜线E=11200,黄铜线E=11200 d=线径 Do=OD=外径 Di=ID=内径 Dm=MD=中径=Do-d N=总圈数
记号的含义 螺旋弹簧的设计时候使用的记号如下表1所示。横弹性系数G的值如表2所示。表1.计算时使用的记号及单位 表2.横弹性系数:G(N/m㎡)
螺旋弹簧的设计用基本计算公式 螺旋弹簧的负荷和弹簧定数?弯曲的关系 具有线性特征弹簧的负荷和弯曲是成比例的。 从螺旋弹簧的尺寸求弹簧的定数 压缩螺旋弹簧的素线径因扭转而产生弯曲的弹簧定数K 螺旋弹簧的扭转应力 螺旋弹簧的扭转修正应力 螺旋弹簧试验载荷下高度(端面磨削的情况下) 不同材质螺旋弹簧在高温时的机械特性 表3. 不同温度下弹簧的横弹性定数(N/mm2)
表4. 不同温度下弹簧的容许应力(N/mm2) 组合弹簧的计算公式 螺旋弹簧的直列和并列 弹簧在设计的时候,虽然应该尽可能设计一根弹簧,但是一根弹簧无法满足的情况下,也会对多根弹簧进行组合以满足设计要求。 弹簧的组合有纵向排列的直列法和横向排列的并列法两种模式。 这样的分类,不仅和螺旋弹簧有关,盘形弹簧等其他种类的弹簧也是一样,也会进行直列和并列组合来使用。 从负荷的观点来考虑的话,对各个弹簧作用相等的力的组合方式叫直列,各个弹簧变位相等的组合方式叫并列。
图1. 螺旋弹簧的直列组合和并列组合 图示显示的是使用了3个弹簧的情况。 n个弹簧的各个定数就是k1 , k2 ,???, kn 弹簧并列和直列组合时全部的定数K公式参照下列。 式1. 并列的弹簧定数计算公式 式2. 直列的弹簧定数计算公式 并列组合的螺旋弹簧的个数增加会导致全体弹簧定数变大,直列组合个数的增加会导致弹簧定数变小。 図2. 亲子弹簧
并列的字面意思就是横向排列,但是单纯的排列空间上不好安排,所以像图3那样弹簧的内侧和弹簧组合,同心相排的情况下很多。这样的排列一般被称作亲子弹簧。 但是,同心组合的情况下,为了弹簧不互相缠绕在一起,交替的改变弹簧卷的方向,或者确保弹簧和弹簧之间有一定的间隙是很有必要的。 另外,对弹簧的组合进行下功夫的话,像下图a,b那样,可以制作出不是直线的弹簧特性。 例如需要像图4那样特性弹簧的时候,需要对自由长或者不同密着负荷的弹簧进行组合。 图5的弹簧特性是在图6那样结构中加入弹簧,事先加上负荷,就会得到〔上段弹簧定数〕<〔下段弹簧定数〕这样的组合。 図5.得到特殊弹簧特性的结构 弹性能量的计算公式 弹簧内积蓄的能量 弹簧加上负荷的话,弹簧内就会被积蓄能量。 弹簧内积蓄的能量U,和图6中荷重P―変位δ曲线围成的面积相同 図6. 弹簧内积蓄的能量 用公式3来表示。 一般常见的弹簧积蓄能量的公式。
1 产品介绍 DMU机构运动分析(Kin)是专门做DMU装配运动仿真的模块。针对大型产品如整车、飞机、轮船等的机构运动状态进行评价。 2 图标功能介绍(基本概念、基本界面介绍) 2.1DMU运动仿真(DMU Simulation)工具条 命令驱动仿真(Simulating with Commands) 规则驱动仿真(Simulating With Laws) 机构修饰(Mechanism Dressup) 创建固定副(Fixed Part) 装配约束转换(Assembly Constraints Conver) 测量速度和加速度(Speeds and Accelerations) 机构分析(Mechanism Analysis) 2.2DMU运动副创建工具条(Kinematics Joints) 创建转动副(Creating Revolute Joints) 创建滑动副(Creating Prismatic Joints) 创建同轴副(Creating Cylindrical Joints) 创建球铰连接(Creating Spherical Joints) 创建平动副(Creating Planar Joints) 创建刚性副(Rigid Joints) 点-线副(Point Curve Joints) 曲线滑动副(Slide Curve Joints) 点-面副(Point Surface Joints) 万向节(Universal Joints) CV连接(CV Joints)
创建齿轮副(Gear Joints) 滑动-转动复合运动副(Rack Joints) 滑动-滑动复合运动副(Cable Joints) 用坐标系法建立运动副(Creating Joints Using Axis Systems)2.3DMU Generic Animation 创建运动仿真记录(Simulation) 生成重放文件(Generate Replay) 重放(Replay) 仿真播放器(Simulation Player) 编辑序列(Edit Sequence) 包络体(Swept Volume) 生成轨迹线(Trace) 2.4机构刷新(DMU Kinematics Update) 机构位置刷新(Update) 输入子机构(Import Sub-Mechanisms) 重设位置(Reset Positions) 2.5干涉检查模式工具条(Clash Mode) 关闭干涉检查(C lash Detection(Off)) 打开干涉检查(C lash Detection(On)) 遇到干涉停止(C lash Detection(Stop)) 2.6DMU 空间分析(DMU Space Analysis) 干涉检查(Clash) 距离和距离带分析(Distance and band analysis)