
第一小节 动态规划问题
——最短路径问题
一 在正式提出动态规划法前我们先看一个数学例子:
例1:在 x 1+x 2+x 3+…+x n =a 是约束条件下,求n x x x z +++= 21的极大值. 令 a x a f ==max )(1 ( 0a x ≤≤ ) )m a x ())(max()(12x a x x a f x a f -+=-+= 令 x a x y -+=
且0)
(22121=---=
--
=x a x x x a x
a x
dx
dy
可得a -x=x, 所以 x=a/2
故 a a a a f 22
2)(2=+= 同理 ))(2max()(max()(23x a x x a f x a f -+=-+=
令 )(2x a x y -+=
0)
(222221=---=--=x a x x x a x a x dx dy 所以 a -x=2x , x=a/3 所以 f 3(a)=a a a a a f 33
1
331231)(3==+=
用数学归纳法可以证明:f n (a) =na , x 1=x 2=x 3=…=x n =n
a
证明:1:n=1 …
2:设f n (a) =na , x 1=x 2=x 3=…=x n =n
a
成立,则 f n+1(a)=max(x +f n (a-x))=max(
)(x a n x -+)
令 y=)(x a n x -+
y ’=
x 21
x
a n -2=
0)
(2=---x a x nx x a
所以 nx=a-x ,(n+1)x=a x=
1
+n a f n+1(a)=
1+n a +n 1
+n a =a n )1(+ 我们刚才的解题策略是:“摸着石头过河”,f2 利用f1的结果,f3又利用f2的结果。。。。。。
类似于游戏中的一个勇士打败了一些敌人后得到一件武器,然后去打败另一个强大一些的对手,得到一件更好的武器,接着打败更强大的敌人。。。。。最后取得胜利。。。
在实际生活中,有这么一类问题,它们的活动过程可分为若干个阶段,而且在任一阶段 后的行为仅依赖于第I 阶段的过程状态,而与I 阶段之前的过程如何达到这种过程如何达到这种状态的方式无关,这样的过程就构成了一个多阶段决策过程。在50年代,贝尔曼(Richard Bellman )等人根据这类问题的多阶段决策的特性,提出了解决问题的“最优性原理”从而创建了最优化问题的一种最新的算法设计方法——动态规划。 分治法和动态规划法的比较
动态规划算法与分治法类似,其根本思想也是将待求解问题分解成若干个子问题,先求
解子问题,然后从这些子问题的解得到原问题的解,与分治法不同的是,适合于用动态规划法求解的问题,经分解得到的子问题往往不是互相独立的.以从16个数据中找出最大者为例,说明 分治法的“静”和动态规划法的“动”的区别。
下面我们以具体的例子来说明如何运用动态规划算法来求解问题,并分析可用动态规划算法解的问题的所应具备的一般特征。
对教材68页上的里子给予简要说明(因为书上的文字叙述有些含混晦涩,对符号的说明不清晰)
y
下面精讲一个例子
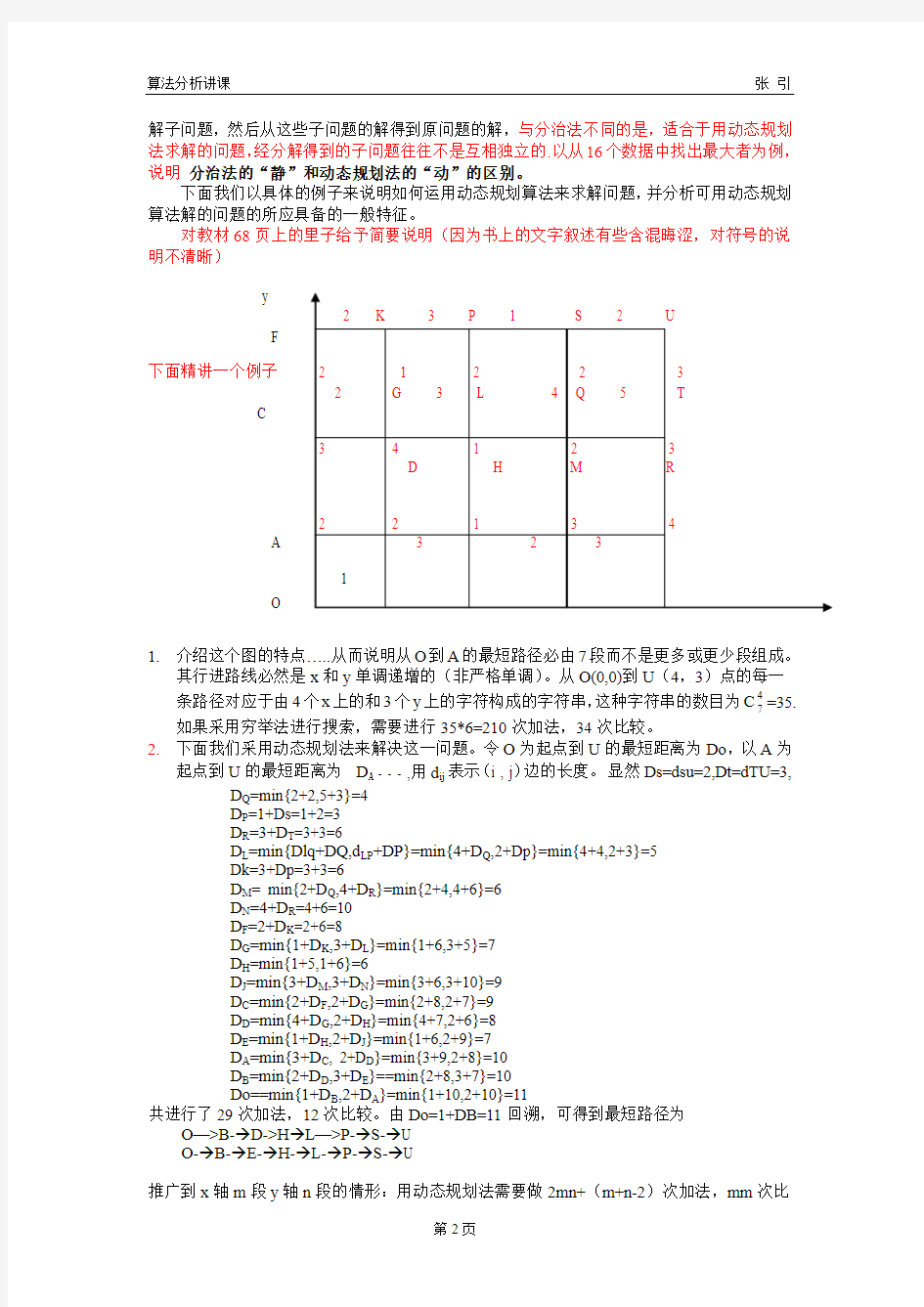
1. 介绍这个图的特点…..从而说明从O 到A 的最短路径必由7段而不是更多或更少段组成。
其行进路线必然是x 和y 单调递增的(非严格单调)。从O(0,0)到U (4,3)点的每一
条路径对应于由4个x 上的和3个y 上的字符构成的字符串,这种字符串的数目为C 47=35.
如果采用穷举法进行搜索,需要进行35*6=210次加法,34次比较。
2. 下面我们采用动态规划法来解决这一问题。令O 为起点到U 的最短距离为Do ,以A 为
起点到U 的最短距离为D A - - - ,用d ij 表示(i , j )边的长度。 显然Ds=dsu=2,Dt=dTU=3,
D Q =min{2+2,5+3}=4 D P =1+Ds=1+2=3 D R =3+D T =3+3=6
D L =min{Dlq+DQ,d LP +DP}=min{4+D Q ,2+Dp}=min{4+4,2+3}=5 Dk=3+Dp=3+3=6
D M = min{2+D Q ,4+D R }=min{2+4,4+6}=6 D N =4+D R =4+6=10 D F =2+D K =2+6=8
D G =min{1+D K ,3+D L }=min{1+6,3+5}=7 D H =min{1+5,1+6}=6
D J =min{3+D M ,3+D N }=min{3+6,3+10}=9 D C =min{2+D F ,2+D G }=min{2+8,2+7}=9 D D =min{4+D G ,2+D H }=min{4+7,2+6}=8 D
E =min{1+D H ,2+D J }=min{1+6,2+9}=7 D A =min{3+D C , 2+D D }=min{3+9,2+8}=10 D B =min{2+D D ,3+D E }==min{2+8,3+7}=10 Do==min{1+D B ,2+D A }=min{1+10,2+10}=11
共进行了29次加法,12次比较。由Do=1+DB=11回溯,可得到最短路径为
O —>B-→D->H →L —>P-→S-→U O-→B-→E-→H-→L-→P-→S-→U
推广到x 轴m 段y 轴n 段的情形:用动态规划法需要做2mn+(m+n-2)次加法,mm 次比
较;而如果用穷举法,需要
)1(*!!)!(-++n m n m n m 次加法,1!
!)!
(-+n m n m 次比较。 若m=n, 动态规划法要做2n 2 +2n-2次加法,n 2 次比较,因此复杂度为O(n 2) ;而穷举法需要
)12(*!!)!2(-n n n n 次加法,1!
!)!
2(-n n n 次比较 ,>O(n2n+1)。
第二小节 动态规划问题
——货郎担问题
1. 动态规划方法的思想
--- 动态规划是一种将问题实例分解为更小的、相似的子问题,并存储子问题的解而避免计算重复的子问题,以解决最优化问题的算法策略。 2. 货郎担问题:
--- 某售货员要到若干个村庄售货,各村庄之间的路程是已知的,为了提高效率,售货员决定从所在商店出发,到每个村庄售一次货然后返回商店,问他应选择一条什么路线才能使所走的总路程最短?
实质 --- 从某点出发,遍历其余点,再回到原点,求总路径消耗最少的路线.
[例]设共有4个要经过的点- --1,2,3,4---各个点之间的花费如下: 1--->2 : 10; 1--->3 : 15; 1--->4 : 20; 2--->1 : 5; 2--- >3 : 9; 2--- >4 : 10; 3--->1 : 6; 3--- >2 : 13; 3--- >4 : 12; 4--->1 : 8; 4--- >2 : 8; 4--- >3 : 9; (最短路径 :1--- >2--->4--->3--->1))
T(V1; V) --- 表示从V1出发,经过顶点集合V 中的点各一次,再回到点
V1的最短路径.
2.)动态规划函数:
T(vi; V) = min{dij + T(vj ; V-{vj})} (vj 属于 V)
●T(vi; V):就是从V中任何一点vi出发, 经过V中的点各一次,再回到
点 vi的最短路径.
●Dij:表示从点vi出发,到某点vj的耗费(有方向性).
●注:这是一个递归定义的函数,关键是每次的函数T(vi; V)它所处理的点
集逐渐减少.
3.)实例:(如上图)求从v1出发的货郎担问题.
解: T(v1; V)= T(v1; v1, v2, v3, v4)
= min{ d12 + T(v2; v3, v4),
d13 + T(v3; v2, v4),
d14 + T(v4; v2, v3) }
//实例意义:初始的货郎担问题是从点v1出发,涉及其余3点
v2,v3,v4;那按照动态规划“分而治之”的思想(这里就
是把问题规模缩小,而问题的数量可多一些),我们可先
计算分别从v2, v3, v4出发,涉及(v2, v3, v4)三点的
三条货郎担路线的路耗,再各自加上相应的dij,这样,
最后就得到3个总路耗,再做一个min运算,就可求出初
始问题的解.
T(v2; v3, v4)= min { d23 + T(v3; v4), d24 + T(v4;v3)}
T(v3; v4)= d34 + T(v4, @)
T(v4; v3)= d43 + T(v3, @)
T(v4, @)= d41
T(v3, @)= d31
T(v3; v4)= d34+ d41=6+9=15
T(v4; v3)= d43+ d31=8+8=16
T(v2; v3, v4)= min { d23 + d34+ d41, d24 + d43+ d31}
= min { 7+6+9, 6+8+8}=22
同理:
T(v3; v2, v4)= min { d32 + d24+ d41, d34 + d42+ d21}
= min { 5+6+9, 6+5+4}=15
T(v4; v2, v3)= min { d42 + d23+ d31, d43 + d32+ d21}
= min { 5+7+8, 8+5+4}=17
则最后: T(v1; v1, v2, v3, v4)
= min{ d12 + T(v2; v3, v4),
d13 + T(v3; v2, v4),
d14 + T(v4; v2, v3) }
= min{ 2+22,5+15,8+17 }=20
所选的路线是:1->3->4->2->1
第三小节动态规划问题
——投资问题
一问题描述:投资问题就是考虑如何把有限资源分配给若干个工程的问题。
二给定条件:1.资源总数(设为a)
2.工程个数(设为n)
3.每项工程投资的利润(不同数目的投资所获得的利润不同),用向量G i(1≦i
≦n)表示。
n
三问题求解:求出一个a的分划x1, x2,….., x n,0≦x i≦a, 且∑x i≦a,使得以下式表示的利润为最大:
i=1
n
G(a)= ∑G i (x j) 0≦x j≦a
i=1
其中G i (x j)是把资源x j分配给第I项工程能获得的最大利润。
四问题分析:
i)若G i是x的线性函数,则为线性规划问题。
ii)若G i不是线性函数,则要用动态规划求最佳分配。
用总量为a的资金在n个项目上进行投资以取得最大的利润,可以转化为下述的问题:
将总量资金a分为两部分z(0≦z≦a)及a-z,分别用在第n个项目及剩下的n-1个项目上进行投资,获得的最大利润G(a)=max(第n个项目上资金量为z的利润与用a-z的资金在n-1个项目上投资的最大利润之和)。这样问题就转化为”求用a-z的资金在n-1个项目上投资的最大利润”,与我们的原问题”求总量为a的资金在n个项目上进行投资以取得最大的利润”性质完全一致,仅仅是问题的规模比原问题少了一个项目,如此将问题的规模细化下去,一直到项目数为1为止,则问题迎刃而解。我们在对原问题进行”分而治之”的过程当中,最终实现了最优化的求解。
五问题解决方案:
设f i(x):前i个项目共投资资金x所产生的最大利润;d i(x):产生f i(x)在项目i上的资金数。
由上分析可给出投资问题的动态规划函数方程:
f1(x)= G1(x);
d1(x)=x x=0,1……a
f i(x)=max[G i(z)+ f i-1(x-z)] z=0,1……x; x=0,1……a
d i(x)=产生f i(x)的z值i=2,3…..n;
六问题举例:
设有8(万元)的投资可分给3个项目,每个项目的利润函数如下表(一)所示:
第1步:设项目1是可用于投资的唯一项目,把x万元投资到项目1,利润为f1(x)= G1(x)
这就得到表(二)的最后一行的值,投资到项目1的最优数量为
d1(x)=x x=0,1……8;
第二步:设资金8万元可投资到项目1和项目2。由第1步已知任意数量的资源投资到项目1所产生的最优,所以下到各种和式中的最大值就是目前情况下的最大利润:
G2(0)+ f1(8)=0+100=100 G2(1)+ f1(7)=5+98=103
G2(2)+ f1(6)=15+95=110 G2(3)+ f1(5)=40+90=130
G2(4)+ f1(4)=80+60=140 G2(5)+ f1(3)=70+40=110
G2(6)+ f1(2)=73+15=88 G2(7)+ f1(1)=74+5=79
G2(8)+ f1(0)=75+0=75
可见将8万元投资于项目1和2 ,所能获得的最大利润f 2(8)及投资到项目2的最优数量分别为:
f 2(8)=max[G 2(z)+ f 1(8-z)]=140 z=0,1……8 d 2(8)=4;
第三步:假设以任意x(≠8)万元投资到项目1和2,对每个x 值,计算从项目1和2所产生的最优利润,即:
f 2(x)=max[G 2(z)+ f 1(x-z)] z=0,1……x; 投资到项目2的数量为 d 2(x)=产生f 2(x)的z 值。 得到所表(二)的结果。
第四步:将8万元投资于3个项目,这就是原问题。则f 3(8)应取下述各量的最大值: G 3(0)+ f 2(8)=0+140=140 G 3(1)+ f 2(7)=4+120=124 G 3(2)+ f 2(6)=26+96=126 G 3(3)+ f 2(5)=40+90=130 G 3(4)+ f 2(4)=45+80=125 G 3(5)+ f 2(3)=50+40=90 G 3(6)+ f 2(2)=51+15=66 G 3(7)+ f 2(1)=52+5=57 G 3(8)+ f 2(0)=53+0=53 因此将8万元以最优方式投资到3个项目时所获得的最大利润及投资到项目3的分别为:
f 3(8) =G 3(0)+ f 2(8)=140 d 3(8)=0;
因为d 3(8)=0;故剩下8万元要最优的投资到项目1和2中。由表(二)易知,当项目1和2 可用时,d 2(8)=4表示 投资到项目2的最优数量,因此项目1应投资剩下的4万元。
第四小节 动态规划问题
——矩阵连乘积问题
一、求矩阵的连乘积
1、一个实际的例子(体现了乘积顺序对矩阵连乘的重要性) a) 例子 在讲这个问题之前先举个例子——
M =A *B *C ,其中A=( a ij )10*100 B=( b ij )100*5 C=( c ij )5*50
根据矩阵乘法的结合律,则有M =(A *B )*C 和M =A *(B*C )两个方案 但是可以发现他们所做的乘法的次数是不相同的 以M =(A *B )*C 为例
令AB=M ‘
=(m ’
ij )10*5,因此m ’
ij =
kj k ik
b a
∑=?100
1
(其中,I=1,2……10;j =1,2……5)故计
算AB 共进行了10*5*100=5000次乘法
M= M ‘
C =
kj k ik
c m
∑=?100
1
'
(其中,I=1,2……10;j =1,2……50)故计算M ‘C 共进行了
10*5*50=2500次乘法
总共需要 5000+2500=7500次乘法
同理,M =A *(B*C )方案需要 100*5*50+10*100*50=25000+50000=75000次乘法,两者相差近十倍!!!
B )结论
不难得出,矩阵相乘的结合方式对计算结果所需要的乘法操作总数有很大的影响。但是M 相乘的个数增多至n 个,求出所有的可能结合方式的乘法操作次数,再从中找出操作次数最小的结合方式,其工作量是惊人的@!
对于n 个矩阵的连乘积,设有P (n )个不同的计算次序。由于我们可以先在第k 和k +1个矩阵之间将原矩阵序列分为两个矩阵子序列,k =1,2,……n -1。然后分别对这两个矩阵子序列完全加括号。最后对所得结果加括号,得到原矩阵序列得一种完全加括号方式。由此,可以得到关于P (n )得递归式如下:
P (n )=1 , n=1时
P (n )=
∑-=-1
1
)
()(n k k n P k P ,n>1时
解此递归方程可得,P (n )=C (n -1)其中,C (n )=???
? ??+n n n 211=)4(2/3n n Ω P (n )=P(1)P(n-1)+P(2)P(n-2)+……+P (n -1)P (1) P (2)=1
P (n )=???
?
??+n n n 211 这样的话这种枚举的方法实际上是不可能的。
这里用动态规划的方法可以提供一种O (n 3)的算法。如果可以找出乘法次数最少的的结合方式来计算的话,那么就减少了不少工作量。
2、动态规划法求解的方案(还是以一个实际的例子来讲动态规划法的算法) a ) 算法分析举例
最佳的乘积方案是(A 1A 2……A i )(A I +1A I +2……A n )则A 1A 2……A i 和A I +1A I +2……A n
必须达到最佳。令m ij 为计算乘积A I A I +1……A j 的最少乘法数,显然有
m ij ={}
11;1;min +++≤++j k k ik j
k i r r r j m m m ii =0, I ,j =1,2……n
其中m ik 是求A I A I +1……A k 乘积时最佳方案的乘积数目,m 会+1;j 是求A k +1A k +2……A j 乘积时的最佳方案的乘积数,A I A I +1……A k 是r i *r k+1阶矩阵,A k +1A k +2……A j 是r k+1*r j+1
矩阵,r i r k+1 r j+1是求(A I A I +1……A k )(A k +1A k +2……A j )所需的乘数法
利用上式将之变为多段判决即可 以计算以下4个矩阵为例
A 1=30*35,A 2=35*15,A 3=15*5,A 4=5*10 n =4为例 m 12=30*35*15=15750=30*35*15=15750 m 23=35*15*5=2625 m 34=15*5*10=750
m 13=min{ m 12+30*15*5, m 23+30*35*5}= min{ 15750+2250, 2625+5250}=7875 m 24=min{ m 23+30*5*10, m 34+35*15*10}= min{ 2625+1750, 750+5250}=4375 m 14=min{ m 12+ m 34+30*15*10, m 24+30*35*10, m 13+30*5*10}= min{ 15750+4500,4375+10500, 7875+30*5*10}=9375
B )
计算顺序是沿着对角线进行的。
如果编程的话,程序如下(!c++程序只供参考,不作为讲课内容)
void MatrixChain (int p, int n, int n*m, int **s)
{
for (int r=2; r<=n; r++)
for (int i=1; i<=n-r+1; i=i++)
{
int j=I+r-1;
m[i][j]=m[i+1][j]+P[i-1]*p[i]*p[j];
s[i][j]=I;
for (int k=i+1; k { int t=m[i][k]+m[k+1][j]+p[I-1]*p[k]*p[j]; if (t } } } 计算量主要取决于程序中对r,I,k的三重循环。循环体内的计算量为O(1),而三重循环的总次数为O(n3),由此该算法的计算时间上界为O(n3),算法所占用的空间显然为O(n2),显然比穷举搜索法有效的多。 二、动态规划的基本要素(综合讲过的几个例子,总结算法的基本要素) 从以上的最优计算次序的动态规划算法可以看出,这些算法的有效性依赖于问题本身所具有的两个重要性质:最优子结构性质和子问题重叠性质。从一般意义上讲,问题所具有的这两个重要的性质是该问题可用动态算法求解的基本要素。 1最优子结构 设计动态规划算法的第一步通常是要刻画最优解的结构。当问题的最优解包含了其子问题的最优解时,称该问题具有最优子结构性质。问题的最优解子结构性质提供了该问题可用动态规划求解的重要线索。 比如,在矩阵连乘积最优解计算次序问题中,我们注意到,若A1、A2……A n的最优完全加括号方式在A k和A K+1之间将矩阵链断开,则由此确定的子链A1、A2……A k和A K+1、A K+2……A n得完全加括号方式也最优。即该问题具有最优解子结构性质。在分析该问题得最优解导出得其子问题得解不是最优的,然后再设法说明在这个假设下可构造出一个比原问题最优解更好的解,从而导致矛盾。 在动态规划算法中,问题的最优子结构性质使我们能够自底向上的方法递归的从子问题地最优解逐步构造出整个问题地最优解。同时,它也使我们能在相对小的子问题空间中考虑问题。例如,在矩阵连乘积最优解次序问题中,子问题空间是输入地矩阵链的所有不同子链组成的。所有不同子链的个数为O(n2),因而子空间规模为O(n2) 2重叠子问题 可用动态规划算法求解问题应具备地另一基本要素是子问题地重叠性质。在用递归算法自顶向下解此问题时。每次产生地子问题并不总是新问题,有些子问题被反复计算多次。多态规划算法正式利用了这种子问题地重叠性质,对每个问题只解一次,尔后将其解保存在一个表格中,当再次需解此问题时,只是简单地用常数时间查看一下结果。通常,不同地子问题个数随输入问题地大小呈多项式增长。因此,用动态规划算法通常只需多项式时间,从而得较高得解题效率。 例如,搜索法和动态规划求解矩阵连乘法(这里略去具体……) 由此可以看出,在解某个问题得直接递归算法所产生得递归数中,相同的子问题反复出现,并且不同子问题的个数又相对减少时,用动态规划算法是有效的 三、分治法和动态规划法的比较 动态规划算法与分治法类似,其根本思想也是将待求解问题分解成若干个子问题,先求解子问题,然后从这些子问题的解得到原问题的解,与分治法不同的是,适合于用动态规划法求解的问题,经分解得到的子问题往往不是互相独立的。(!! 这里严求真已经提过了) 若用分治法来求解这类问题,则分解得到的子问题数目太多,以至于最后解原问题需耗费指数时间。然而,不同子问题的数目常常只有多项式量级。 在用分治法求解时,有些子问题被重计算了很多次。如果我们保存已解决子问题的答案,而在需要时再找出已求得的答案,这样就可以避免大量的重复计算,从而得到多项式时间的算法。为了达到这个目的,我们可以用一个表来记录所有已解决的子问题的答案。不管该子问题以后是否被用到,只要被计算过,就将其结果填入表中。这就是动态规划法的基本思路。具体的动态规划算法多种多样,但他们具有相同的填表格式。 !!!!!!!另外提一下(-因为第五周的课上,石浩讲分治法求矩阵乘积时说无法看出分治法体现在哪里,后来在一本书上看到如下的解释-) 分治法中的矩阵乘法即Strassen 矩阵乘法中。 其分之思想是,将幂为2的矩阵A ,B ,C 中每一个矩阵都分成4个大小相等的子矩阵,每个矩阵都是(n/2)*(n/2)的方阵,由此可将方程C =AB 重写为 ??????22211211C C C C =?? ????22211211A A A A ?? ????22211211B B B B 分治法的基本思想是将一个矩阵为n 的问题分解为k 个规模较小的子问题,这些子问题的解合并得到原问题的解。 参考资料: 《算法分析与设计》 周培德 机械工业出版社 (教材) 《计算机算法设计与分析》王晓东 电子工业出版社 《算法与复杂性》 卢开澄 高等教育出版社 《计算机算法导引-设计与分析》 卢开澄 清华大学出版社 《计算机算法基础》 余祥宣 崔国华 邹海明 华中科技大学出版社 2003—2004学年度第2学期期末考试试卷(A 卷) 《A 卷参考解答与评分标准》 一 填空题:(18分) 1. 10V 2.(变化的磁场能激发涡旋电场),(变化的电场能激发涡旋磁场). 3. 5, 4. 2, 5. 3 8 6. 293K ,9887nm . 二 选择题:(15分) 1. C 2. D 3. A 4. B 5. A . 三、【解】(1) 如图所示,内球带电Q ,外球壳内表面带电Q -. 选取半径为r (12R r R <<)的同心球面S ,则根据高斯定理有 2() 0d 4πS Q r E ε?==? E S 于是,电场强度 204πQ E r ε= (2) 内导体球与外导体球壳间的电势差 22 2 1 1 1 2200 01211d 4π4π4πR R R AB R R R Q Q dr Q U dr r r R R εεε?? =?=?==- ????? ? r E (3) 电容 12 001221114π/4πAB R R Q C U R R R R εε??= =-= ?-?? 四、【解】 在导体薄板上宽为dx 的细条,通过它的电流为 I dI dx b = 在p 点产生的磁感应强度的大小为 02dI dB x μπ= 方向垂直纸面向外. 电流I 在p 点产生的总磁感应强度的大小为 22000ln 2222b b b b dI I I dx B x b x b μμμπππ===? ? 总磁感应强度方向垂直纸面向外. 五、【解法一】 设x vt =, 回路的法线方向为竖直向上( 即回路的绕行方向为逆时 针方向), 则 21 d cos602B S Blx klvt Φ=?=?= ? ∴ d d klvt t εΦ =- =- 0ac ε < ,电动势方向与回路绕行方向相反,即沿顺时针方向(abcd 方向). 【解法二】 动生电动势 1 cos602 Blv klvt ε?动生== 感生电动势 d 111 d [cos60]d 222d d dB B S Blx lx lxk klvt t dt dt dt εΦ=- =?=--?===?感生- klvt εεε==感生动生+ 电动势ε的方向沿顺时针方向(即abcd 方向)。 六、【解】 1. 已知波方程 10.06cos(4.0)y t x ππ=- 与标准波方程 2cos(2) y A t x π πνλ =比较得 , 2.02, 4/Z H m u m s νλνλ==== 2. 当212(21)0x k ππΦ-Φ==+合时,A = 于是,波节位置 21 0.52k x k m += =+ 0,1,2, k =±± 3. 当 21222x k A ππΦ-Φ==合时,A = 于是,波腹位置 x k m = 0,1,2, k =±± ( 或由驻波方程 120.12cos()cos(4)y y y x t m ππ=+= 有 (21) 00.52 x k A x k m π π=+?=+合= 0,1,2, k =±± 20.122 x k A m x k m π π=?=合=, 0,1,2, k =±± ) 北京航空航天大学 20XX-20XX 学年第一学期期末 《传感器技术与测试系统》 考试卷 班级______________学号 _________ 姓名______________成绩 _________ 20XX年XX月XX日 班号学号姓名成绩 《测试信号处理技术》期末考试卷 注意事项: 1、选择题只有完全正确才得分,答错不扣分; 2、请用最简练的文字完成填空题和简答题; 3、所有答案均需在答题卷中书写,在考试卷中作答无效; 4、整个考试时间为2小时; 5、严格遵守考试纪律,考试期间如果有什么问题,请举手和监考老师联系。 题目: 一、选择题………(每道题的正确答案为1个或1个以上,每题3分,共15分) 1、如图1所示为某一信号的频谱分析结果,由图可知该信号由周期信号和随机噪声组成, 其中周期信号的频率为() (A)30Hz (B)150Hz (C)30Hz和70Hz (D)30Hz和150Hz 图1 某一信号的频谱分析结果 2、能够实现对角位移测量的测试原理有() (A)变电阻测量原理(B)变电容测量原理 (C)变电感测量原理(D)谐振式测量原理 3、下面关于石英晶体和压电陶瓷说法正确的有() (A)石英晶体的压电常数比压电陶瓷的大(B)石英晶体的居里点温度比压电陶瓷的高 (C)石英晶体需要人工极化,而压电陶瓷不需要 (D)石英晶体压电性能温度稳定性比压电陶瓷的差 4、一测试系统的输入信号是30Hz的正弦波,通过频谱分析发现其输出信号中包括7.5Hz、 15Hz、30Hz、60Hz等谐波成分,可以判断() (A)在输入端肯定有外界干扰信号(B)该测试系统是线性测试系统 (C)该测试系统是非线性测试系统(D)该系统是比较理想的测试系统 5、某公斤称采用悬臂梁四臂差动应变式测量原理,如图2所示,则() F 图2某公斤称的原理结构图 (A)由于梁的受力点处的挠度最大,故应变片粘贴位置越靠近该受力点越好 (B)由于梁的根部的挠度接近于零,故应变片粘贴位置应远离该点 (C)由于梁的受力点处的应变最大,故应变片粘贴位置越靠近该受力点越好 (D)由于梁的根部的应变最大,故应变片粘贴位置越靠近该点越好 二、填空题……………………………………………………(每题3分,共15分) 1、如图3所示为一交流电桥,其平衡条件为和。 图3 交流电桥 2、在进行谐振测量时,谐振系统的品质因素Q值越高,则说明该系统的抗干扰能力越。 (备选答案:强或弱) 3、用两陀螺仪对某一旋转载体进行角速度测量,载体实际旋转角速度为1rad/s,其中A 陀螺仪的一组测量值分别为1.110rad/s、1.112rad/s、1.109rad/s、1.111rad/s、1.110rad/s,B陀螺仪的一组测量值分别为1.082rad/s、0.926rad/s、1.0724rad/s、0.938rad/s、1.0768。 由此可以判断A陀螺仪比B陀螺仪的精密度,A陀螺仪比B陀螺仪的准确 度。(备选答案:高或低) 第2章刚体得转动 一、选择题 1、如图所示,A、B为两个相同得绕着轻绳得定滑轮.A滑轮挂一质量为M得物体,B滑轮受拉力F,而且F=Mg.设A、B两滑轮得角加速度分别为βA与βB,不计滑轮轴得摩擦,则有 (A) βA=βB。(B)βA>βB. (C)βA<βB.(D)开始时βA=βB,以后βA<βB。 [] 2、有两个半径相同,质量相等得细圆环A与B。A环得质量分布均匀,B环得质量分布不均匀。它们对通过环心并与环面垂直得轴得转动惯量分别为JA与J B,则 (A)JA>J B.(B) JA 工程力学期末考试试卷( A 卷)2010.01 一、填空题 1. 在研究构件强度、刚度、稳定性问题时,为使问题简化,对材料的性质作了三个简化假设:、和各向同性假设。 2. 任意形状的物体在两个力作用下处于平衡,则这个物体被称为(3)。 3.平面一般力系的平衡方程的基本形式:________、________、________。 4.根据工程力学的要求,对变形固体作了三种假设,其内容是:________________、________________、________________。 5拉压杆的轴向拉伸与压缩变形,其轴力的正号规定是:________________________。6.塑性材料在拉伸试验的过程中,其σ—ε曲线可分为四个阶段,即:___________、___________、___________、___________。 7.扭转是轴的主要变形形式,轴上的扭矩可以用截面法来求得,扭矩的符号规定为:______________________________________________________。 8.力学将两分为两大类:静定梁和超静定梁。根据约束情况的不同静定梁可分为:___________、___________、__________三种常见形式。 T=,若其横截面为实心圆,直径为d,则最9.图所示的受扭圆轴横截面上最大扭矩 max τ=。 大切应力 max q 10. 图中的边长为a的正方形截面悬臂梁,受均布荷载q作用,梁的最大弯矩为。 二、选择题 1.下列说法中不正确的是:。 A力使物体绕矩心逆时针旋转为负 B平面汇交力系的合力对平面内任一点的力矩等于力系中各力对同一点的力矩的代数和 C力偶不能与一个力等效也不能与一个力平衡 D力偶对其作用平面内任一点的矩恒等于力偶矩,而与矩心无关 2.低碳钢材料由于冷作硬化,会使()提高: A比例极限、屈服极限 B塑性 C强度极限 D脆性 3. 下列表述中正确的是。 A. 主矢和主矩都与简化中心有关。 B. 主矢和主矩都与简化中心无关。 C. 主矢与简化中心有关,而主矩与简化中心无关。 D.主矢与简化中心无关,而主矩与简化中心有关。 4.图所示阶梯形杆AD受三个集中力F作用,设AB、BC、CD段的横截面面积分别为2A、3A、A,则三段杆的横截面上。 例1:1 mol 氦气经如图所示的循环,其中p 2= 2 p 1,V 4= 2 V 1,求在1~2、2~3、3~4、4~1等过程中气体与环境的热量交换以及循环效率(可将氦气视为理想气体)。O p V V 1 V 4 p 1p 2解:p 2= 2 p 1 V 2= V 11234T 2= 2 T 1p 3= 2 p 1V 3= 2 V 1T 3= 4 T 1p 4= p 1V 4= 2 V 1 T 4= 2 T 1 (1)O p V V 1 V 4 p 1p 21234)(1212T T C M m Q V -=1→2 为等体过程, 2→3 为等压过程, )(2323T T C M m Q p -=1 1123)2(23RT T T R =-=1 115)24(2 5RT T T R =-=3→4 为等体过程, )(3434T T C M m Q V -=1 113)42(2 3 RT T T R -=-=4→1 为等压过程, )(4141T T C M m Q p -=1 112 5)2(25RT T T R -=-= O p V V 1 V 4 p 1p 21234(2)经历一个循环,系统吸收的总热量 23121Q Q Q +=1 112 13 523RT RT RT =+=系统放出的总热量1 41342211 RT Q Q Q =+=% 1.1513 2 112≈=-=Q Q η三、卡诺循环 A → B :等温膨胀B → C :绝热膨胀C → D :等温压缩D →A :绝热压缩 ab 为等温膨胀过程:0ln 1>=a b ab V V RT M m Q bc 为绝热膨胀过程:0=bc Q cd 为等温压缩过程:0ln 1<= c d cd V V RT M m Q da 为绝热压缩过程:0 =da Q p V O a b c d V a V d V b V c T 1T 2 a b ab V V RT M m Q Q ln 11= =d c c d V V RT M m Q Q ln 12= =, 卡诺热机的循环效率: p V O a b c d V a V d V b V c ) )(1 212a b d c V V V V T T Q Q (ln ln 11-=- =ηT 1T 2 bc 、ab 过程均为绝热过程,由绝热方程: 11--=γγc c b b V T V T 1 1--=γγd d a a V T V T (T b = T 1, T c = T 2)(T a = T 1, T d = T 2) d c a b V V V V =1 212T T Q Q -=- =11η p V O a b c d V a V d V b V c T 1T 2 卡诺制冷机的制冷系数: 1 2 1212))(T T V V V V T T Q Q a b d c ==(ln ln 2 122122T T T Q Q Q A Q -= -== 卡ω 传感器原理及其应用习题 第1章传感器的一般特性 一、选择、填空题 1、衡量传感器静态特性的重要指标是_灵敏度______、__线性度_____、____迟滞___、___重复性_____ 等。 2、通常传感器由__敏感元件__、__转换元件____、_转换电路____三部分组成,是能把外界_非电量_转换成___电量___的器件和装置。 3、传感器的__标定___是通过实验建立传感器起输入量与输出量之间的关系,并确定不同使用条件下的误差关系。 4、测量过程中存在着测量误差,按性质可被分为粗大、系统和随机误差三类,其中随机误差可以通过对多次测量结果求平均的方法来减小它对测量结果的影响。 5、一阶传感器的时间常数τ越__________, 其响应速度越慢;二阶传感器的固有频率ω0越_________, 其工作频带越宽。 6、按所依据的基准直线的不同,传感器的线性度可分为、、、。 7、非线性电位器包括和两种。 8、通常意义上的传感器包含了敏感元件和(C )两个组成部分。 A. 放大电路 B. 数据采集电路 C. 转换元件 D. 滤波元件 9、若将计算机比喻成人的大脑,那么传感器则可以比喻为(B )。 A.眼睛 B. 感觉器官 C. 手 D. 皮肤 10、属于传感器静态特性指标的是(D ) A.固有频率 B.临界频率 C.阻尼比 D.重复性 11、衡量传感器静态特性的指标不包括( C )。 A. 线性度 B. 灵敏度 C. 频域响应 D. 重复性 12、下列对传感器动态特性的描述正确的是() A 一阶传感器的时间常数τ越大, 其响应速度越快 B 二阶传感器的固有频率ω0越小, 其工作频带越宽 C 一阶传感器的时间常数τ越小, 其响应速度越快。 D 二阶传感器的固有频率ω0越小, 其响应速度越快。 二、计算分析题 1、什么是传感器?由几部分组成?试画出传感器组成方块图。 2、传感器的静态性能指标有哪一些,试解释各性能指标的含义。 作业3、传感器的动态性能指标有哪一些,试解释各性能指标的含义 第2章电阻应变式传感器 一、填空题 1、金属丝在外力作用下发生机械形变时它的电阻值将发生变化,这种现象称__应变_____效应;半导体或固体受到作用力后_电阻率______要发生变化,这种现象称__压阻_____效应。直线的电阻丝绕成敏感栅后长度相同但应变不同,圆弧部分使灵敏度下降了,这种现象称为____横向___效应。 2、产生应变片温度误差的主要因素有_电阻温度系数的影响、_试验材料和电阻丝材料的线性膨胀系数的影响_。 3、应变片温度补偿的措施有___电桥补偿法_、_应变片的自补偿法、_、。 4. 在电桥测量中,由于电桥接法不同,输出电压的灵敏度也不同,_全桥__接法可以得到最大灵敏度输出。 5. 半导体应变片工作原理是基于压阻效应,它的灵敏系数比金属应变片的灵敏系数大十倍 6.电阻应变片的配用测量电路采用差动电桥时,不仅可以消除线性误差同时还能起到温度补偿 n 3 上海电机学院 200_5_–200_6_学年第_二_学期 《大学物理 》课程期末考试试卷 1 开课学院: ,专业: 考试形式:闭卷,所需时间 90 分钟 考生姓名: 学号: 班级 任课教师 一、填充題(共30分,每空格2分) 1.一质点沿x 轴作直线运动,其运动方程为32 62x t t m ,则质点在运动开始后4s 内 位移的大小为___________,在该时间内所通过的路程为_____________。 2.如图所示,一根细绳的一端固定, 另一端系一小球,绳长0.9L m =,现将小球拉到水平位置OA 后自由释放,小球沿圆弧落至C 点时,30OC OA θ=与成,则 小球在C 点时的速率为____________, 切向加速度大小为__________, 法向加速度大小为____________。(210g m s =)。 3.一个质点同时参与两个在同一直线上的简谐振动,其振动的表达式分别为: 2155.010cos(5t )6x m 、211 3.010cos(5t )6 x m 。则其合振动的频率 为_____________,振幅为 ,初相为 。 4、如图所示,用白光垂直照射厚度400d nm 的薄膜,若薄膜的折射率为 2 1.40n , 且1 2n n n 3,则反射光中 nm , 波长的可见光得到加强,透射光中 nm 和___________ nm 可见光得到加强。 5.频率为100Hz ,传播速度为s m 300的平面波,波 长为___________,波线上两点振动的相差为3π ,则此两点相距 ___m 。 6. 一束自然光从空气中入射到折射率为1.4的液体上,反射光是全偏振光,则此光束射角 《工程力学》练习题 静力学的基本概念和受力分析 1. 刚体是指在力的的作用下,大小和形状不变的物体。 2. 力使物体产生的两种效应是___内_____效应和_ _外___效应。 3、力是矢量,其三要要素是(大小)、方向及作用点的位置。 4、等效力系是指(作用效果)相同的两个力系。 5、非自由体必受空间物体的作用,空间物体对非自由体的作用称为约束。约束是力的作用,空间物体对非自由体的作用力称为(约束反力),而产生运动或运动的趋势的力称为主动力。 6、作用在刚体上的二力,若此两力大小相等、方向相反并同时作用在同一直线上,若此刚体为杆件则称为而二力杆件。(√) 7、作用在刚体上的力,可以沿其作用线滑移到刚体上的任意位置而不会改变力对刚体的作用效应。(√) 8、作用在刚体上的三个非平行力,若刚体处于平衡时,此三力必汇交。(√) 9、在静力学中,常把刚体的受力看成两类力,即主动力与约束力。(√) 10、在静力学中,平面力系中常见的约束有柔绳约束、光滑面约束、铰链约束及固定端约束等。(√) 11. 画出图中AB构件的受力图。 13.画出图中AB杆件的受力图。 15. 画出图中BC杆的受力图,所有物体均不计自重,且所有的接触面都是光滑的. 16. 如图所示,绳AB悬挂一重为G的球。试画出球C的受力图。(摩擦不计) 17 画出下列各图中物体A,构件AB,BC或ABC的受力图,未标重力的物体的重量不计,所有接触处均为光滑接触。 (a) (b) (c) (d) (e) (f) (g) 18。画出图中指定物体的受力图。所有摩擦均不计,各物自重除图中已画出的外均不计。 (a) (b) (e) (f) 平面汇交力系 1 以下说法中正确的是( C ). A、物体在两个力作用下平衡的充分必要条件是这二力等值、反向、共线。 B、凡是受到两个力作用的刚体都是二力构件。 C、理论力学中主要研究力对物体的外效应。 D、力是滑移矢量,力沿其作用线滑移不会改变对物体的作用效应。 力矩和平面力偶系 1. 力矩、力偶矩是度量物体绕某点(矩心)(转动效应)的物理量。用力矩或力偶矩的大小来衡量,其大小等于力(或力偶)与力臂(或力偶臂)的乘积。 2. 力偶在任意坐标轴上的投影的合力为零。(√) 3. 平面内的任意力偶可以合成为一个合力偶,合力偶矩等于各力偶矩的代数和。(√) 4、如图3所示不计自杆件重,三铰刚架上作用两个方向相反的力偶m1和m2,且力偶矩的值 m1=m2=m(不为零),则支座B的约束反力F B( A )。 A、作用线沿A、B连线; B、等于零; n 3 电机学院 200_5_–200_6_学年第_二_学期 《大学物理 》课程期末考试试卷 1 2006.7 开课学院: ,专业: 考试形式:闭卷,所需时间 90 分钟 考生: 学号: 班级 任课教师 一、填充題(共30分,每空格2分) 1.一质点沿x 轴作直线运动,其运动方程为()3262x t t m =-,则质点在运动开始后4s 位移的大小为___________,在该时间所通过的路程为_____________。 2.如图所示,一根细绳的一端固定, 另一端系一小球,绳长0.9L m =,现将小球拉到水平位置OA 后自由释放,小球沿圆弧落至C 点时,30OC OA θ=o 与成,则 小球在C 点时的速率为____________, 切向加速度大小为__________, 法向加速度大小为____________。(210g m s =)。 3.一个质点同时参与两个在同一直线上的简谐振动,其振动的表达式分别为: 215 5.010cos(5t )6x p p -=?m 、211 3.010cos(5t )6 x p p -=?m 。则其合振动的频率 为_____________,振幅为 ,初相为 。 4、如图所示,用白光垂直照射厚度400d nm =的薄膜,为 2 1.40n =, 且12n n n >>3,则反射光中 nm , 波长的可见光得到加强,透射光中 nm 和___________ nm 可见光得到加强。 5.频率为100Hz ,传播速度为s m 300的平面波,波 长为___________,波线上两点振动的相差为3 π ,则此两点相距 ___m 。 6. 一束自然光从空气中入射到折射率为1.4的液体上,反射光是全偏振光,则此光束射角等于______________,折射角等于______________。 二、选择題(共18分,每小题3分) 1.一质点运动时,0=n a ,t a c =(c 是不为零的常量),此质点作( )。 (A )匀速直线运动;(B )匀速曲线运动; (C ) 匀变速直线运动; (D )不能确定 2.质量为1m kg =的质点,在平面运动、其运动方程为x=3t ,315t y -=(SI 制),则在t=2s 时,所受合外力为( ) (A) 7j ? ; (B) j ?12- ; (C) j ?6- ; (D) j i ? ?+6 3.弹簧振子做简谐振动,当其偏离平衡位置的位移大小为振幅的4 1 时,其动能为振动 总能量的?( ) (A ) 916 (B )1116 (C )1316 (D )1516 4. 在单缝夫琅和费衍射实验中波长为λ的单色光垂直入射到单缝上,对应于衍 射角为300的方向上,若单逢处波面可分成3个半波带,则缝宽度a 等于( ) (A.) λ (B) 1.5λ (C) 2λ (D) 3λ 5. 一质量为M 的平板车以速率v 在水平方向滑行,质量为m 的物体从h 高处直落到车子里,两者合在一起后的运动速率是( ) (A.) M M m v + (B). (C). (D).v 1、从不同角度,测量方法有不同的分类,根据测量方式可分为、与。 2、电阻应变片的工作原理是基于的电阻值相应发生变化。 3、电阻应变片的温度补偿方法通常有和两大类。是最常用的且效果较好的线路补偿方法。 4、当衔铁位于中心位置时,差动变压器输出电压并不等于零,我们把差动变压器在零位移时的输出电压称为零点残余电压,其主要是由于传感器的两次级绕组的与不对称,以及磁性材料的非线性等问题引起的。 5、要满足交流电容电桥的平衡,除要满足条件外,还必须满足条件。 6、压电陶瓷与石英晶体相比, 7、磁电感应式传感器根据法拉第电磁感应定律,可以设计成两种磁电传感器结构:式和式。 8、在电荷耦合器件(CCD中,一个结构称为一个光敏元或一个像素。 9、氯化锂湿敏电阻是利用吸湿性盐类潮解,发生变化而制成的测湿元件。 10、半导体陶瓷湿敏电阻根据其材料的电阻率随湿度增加而不同可以分为负特性湿敏半导体陶瓷和正特性湿敏半导体陶瓷。当相对湿度从0%RH 变化到100%RH 时, 湿敏半导体陶瓷的电阻值变化3个数量级,而湿敏半导体陶瓷的阻值仅变化1个数量级。 11、半导体色敏传感器相当于两只结构不同的的组合,故又称。 12、压电式超声波探头利用压电效应来产生超声波。 13、根据微波传感器的原理,微波传感器可以分为两类。 14、微波湿度传感器的工作原理是基于介质对微波的吸收与介质的成正比,水对微波的吸收作用最强。 15核辐射与物质间的相互作用主要有两种:电离作用,核辐射的。这些作用是核辐 射式传感器的工作基础。 16、辨向原理中为了得到相位差为4H B 间距的位置上放置两个 光电元件。 17、采用二进制编码器时,任何微小的制作误差,都可能造成读数的粗差,为了消除粗差,可采用码代替。它是一种码,从任何数变到相邻数时,仅有一位数码发生变化。 二、计算题(共30分) 1、(5分)测量电路的电流值mA I 5. 22=,电压V U 6. 12=,系统误差分别为mA I 5. 0+=?,V U 1. 0+=?,求修正后的功率。 2、(15分)用热电偶测量介质温度,设环境温度为25℃,将其投入300℃的被测介质中,热电偶的时间常数为s 1200=τ,试确定经过350s 后的动态误差。 (提示:热电偶测温属于一阶动态系统,即如果被测介质温度为1T ,传感器测量温度为2T 时,有下列方程成立:dt dT T T 2021τ+=)。 3、(10分)对于一阻值为120Ω的电阻应变片,其应变片灵敏度为05. 2=K ,将其贴在线膨胀系数为/10116-?=g β℃的试件上,电阻应变片敏感栅材质为康铜,其电阻温度系数/10156-?=α℃, 线膨胀系数/109. 146-?=s β℃。当传感器环境温度从10℃变化到50℃时,所引起的附加电阻相对变 化量/(R R ?为多少?折合附加应变t ε为多少? 三、论述题(共20分,每题5分) 一.最新工程力学期末考试题及答案 1.(5分) 两根细长杆,直径、约束均相同,但材料不同,且E1=2E2则两杆临界应力的关系有四种答案: (A)(σcr)1=(σcr)2;(B)(σcr)1=2(σcr)2; (C)(σcr)1=(σcr)2/2;(D)(σcr)1=3(σcr)2. 正确答案是. 2.(5分) 已知平面图形的形心为C,面积为A,对z轴的惯性矩为I z,则图形对z1轴的惯性矩有四种答案: (A)I z+b2A;(B)I z+(a+b)2A; (C)I z+(a2-b2)A;(D)I z+(b2-a2)A. 正确答案是. z z C z 1 二.填空题(共10分) 1.(5分) 铆接头的连接板厚度t=d,则铆钉剪应力τ=,挤压应力σbs=. P/2 P P/2 2.(5分) 试根据载荷及支座情况,写出由积分法求解时,积分常数的数目及确定积分常数的条件. 积分常数 个, 支承条件 . A D P 三.(15分) 图示结构中,①、②、③三杆材料相同,截面相同,弹性模量均为E ,杆的截面面积为A ,杆的长度如图示.横杆CD 为刚体,载荷P 作用位置如图示.求①、②、③杆所受的轴力. ¢ù C D 四.(15分) 实心轴与空心轴通过牙嵌离合器相连接,已知轴的转速n=100r/min,传递的功率N=10KW,[τ]=80MPa.试确定实心轴的直径d和空心轴的内外直径d1和D1.已知α=d1/D1=0.6. D 1 五.(15分) 作梁的Q、M图. qa2/2 六.(15分) 图示为一铸铁梁,P 1=9kN ,P 2=4kN ,许用拉应力[σt ]=30MPa ,许用压应力[σc ]=60MPa ,I y =7.63?10-6m 4,试校核此梁的强度. P 1 P 2 80 20 120 20 52 (μ ¥??:mm) 传感器原理考试试题 1、有一温度计,它的量程范围为0--200℃,精度等级为0.5级。该表可能出现的最大误差为__±1℃______,当测量100℃时的示值相对误差为_±%1_______。 2、传感器由___敏感元件___ 转换元件_、______测量电路_三部分组成 3、热电偶的回路电势由_接触电势、温差电势_两部分组成,热电偶产生回路电势的两个必要条件是_即热电偶必须用两种不同的热电极构成;热电偶的两接点必须具有不同的温度。。 4、电容式传感器有变面积型、变极板间距型、变介电常数型三种。 5.传感器的输入输出特性指标可分为_静态量_和____动态量_两大类,线性度和灵敏度是传感器的__静态_量_______指标,而频率响应特性是传感器的__动态量_指标。 6、传感器静态特性指标包括__线性度、__灵敏度、______重复性_______及迟滞现象。 7、金属应变片在金属丝拉伸极限内电阻的相对变化与_____应变____成正比。 8、当被测参数A、d或ε发生变化时,电容量C也随之变化,因此,电容式传感器可分为变面积型_、_变极距型_和_变介质型三种。 9、纵向压电效应与横向压电效应受拉力时产生电荷与拉力间关系分别为 F y。 和q y=?d11a b 10、外光电效应器件包括光电管和光电倍增管。 1、何为传感器的动态特性?动态特性主要的技术指标有哪些? (1)动态特性是指传感器对随时间变化的输入量的响应特性; (2)动态指标:对一阶传感器:时间常数;对二阶传感器:固有频率、阻尼比。 2、传感器的线性度如何确定?拟合直线有几种方法? 传感器标定曲线与拟合直线的最大偏差与满量程输出值的百分比叫传感器的线性度;。 四种方法:理论拟合,端基连线拟合、过零旋转拟合、最小二乘法拟合。 3、应变片进行测量时为什么要进行温度补偿?常用的温度补偿方法有哪些? (1)金属的电阻本身具有热效应,从而使其产生附加的热应变; (2)基底材料、应变片、粘接剂、盖板等都存在随温度增加而长度应变的线膨胀效应,若它们各自的线膨胀系数不同,就会引起附加的由线膨胀引起的应变;常用的温度补偿法有单丝自补偿,双丝组合式自补偿和电路补偿法。 4、分布和寄生电容对电容传感器有什么影响?一般采取哪些措施可以减小其影响? 寄生电容器不稳定,导致传感器特性不稳定,可采用静电屏蔽减小其影响,分布电容和传感器电容并联,使传感器发生相对变化量大为降低,导致传感器灵敏度下降,用静电屏蔽和电缆驱动技术可以消除分布电容的影响。 5、热电偶测温时为什么要进行冷端补偿?冷端补偿的方法有哪些? 答:热电偶热电势的大小是热端温度和冷端的函数差,为保证输出热电势是被测温度的单值函数,必须使冷端温度保持恒定;热电偶分度表给出的热电势是以冷端温度0℃为依据,否则会产生误差。因此,常采用一些措施来消除冷锻温度变化所产生的影响,如冷端恒温法、冷端温度校正法、补偿导线法、补偿电桥法。 三、计算题 1、下图为圆形实芯铜试件,四个应变片粘贴方向为R1、R4 轴向粘贴,R 2、R3 圆周向粘贴,应变片的初始值R1=R2=R3=R4=100Ω,灵敏系数k=2,铜试件的箔 松系数μ= 0.285,不考虑应变片电阻率的变化,当试件受拉时测得R1 的变化Δ R1 = 0.2Ω。如电桥供压U = 2V,试写出ΔR2、ΔR3、ΔR4 输出U0(15分) 答案在试题后面显示 模拟试题 注意事项: 1.本试卷共三大题,满分100分,考试时间120分钟,闭卷; 2.考前请将密封线内各项信息填写清楚; 3.所有答案直接做在试卷上,做在草稿纸上无效; 4.考试结束,试卷、草稿纸一并交回。 一、选择题 1、一质点在平面上作一般曲线运动,其瞬时速度为,瞬时速率为,某一时间内的平均速度为,平均速率为,它们之间的关系必定有:() (A)(B) (C)(D) 2、如图所示,假设物体沿着竖直面上圆弧形轨道下滑,轨道是光滑的,在从A至C的下滑过程中,下面 哪个说法是正确的?() (A) 它的加速度大小不变,方向永远指向圆心. (B) 它的速率均匀增加. (C) 它的合外力大小变化,方向永远指向圆心. (D) 它的合外力大小不变. (E) 轨道支持力的大小不断增加. 3、如图所示,一个小球先后两次从P点由静止开始,分别沿着光滑的固定斜面l1和圆弧面l2下滑.则小 球滑到两面的底端Q时的() (A) 动量相同,动能也相同.(B) 动量相同,动能不同. (C) 动量不同,动能也不同.(D) 动量不同,动能相同. 4、置于水平光滑桌面上质量分别为m1和m2的物体A和B之间夹有一轻弹簧.首先用双手挤压A和B 使弹簧处于压缩状态,然后撤掉外力,则在A和B被弹开的过程中( ) (A) 系统的动量守恒,机械能不守恒.(B) 系统的动量守恒,机械能守恒.(C) 系统的动量不守恒,机械能守恒.(D) 系统的动量与机械能都不守恒. 5、一质量为m的小球A,在距离地面某一高度处以速度水平抛出,触地后反跳.在抛出t秒后小球A 跳回原高度,速度仍沿水平方向,速度大小也与抛出时相同,如图.则小球A与地面碰撞过程中,地面给它的冲量的方向为________________,冲量的大小为____________________. 西南交通大学2008-2009 学年第(1)学期考试试卷B 课程代码6321600 课程名称 工程力学 考试时间 120 分钟 题号 一 二 三 四 五 六 七 八 九 十 总成绩 得分 阅卷教师签字: 一. 填空题(共30分) 1.平面汇交力系的独立平衡方程数为 2 个,平行力系的最多平衡方程数为 2 个,一般力系的最多平衡方程数为 3 个;解决超静定问题的三类方程是 物理方程 、 平衡方程 、 几何方程 。(6分) 2.在 物质均匀 条件下,物体的重心和形心是重合的。确定物体重心的主要方法至少包括三种 积分 、 悬挂 和 称重或组合 。(4分) 3.求解平面弯曲梁的强度问题,要重点考虑危险截面的平面应力状态。在危险截面,可能截面内力 弯矩 最大,导致正应力最大,正应力最大处,切应力等于 零 ; 也可能截面内力 剪力 最大,导致切应力最大,切应力最大处,正应力等于 零 。作出危险截面上各代表点的应力单元,计算得到最大主应力和最大切应力,最后通过与 许用 应力比较,确定弯曲梁是否安全。(5) 4.某点的应力状态如右图所示,该点沿y 方向的线应变εy = (σx -νσy )/E 。(3分) 5.右下图(a)结构的超静定次数为 2 ,(b)结构的超静定次数为 1 。(2分) 6.描述平面单元应力状态{σx ,σy ,τxy }的摩尔圆心坐标为 (σx +σy ),已知主应力σ1和σ3,则相应摩尔圆的半径为 (σ1-σ3)/2 。(3分) 7.两个边长均为a 的同平面正方形截面,中心相距为4a 并对称于z 轴,则两矩形截面的轴惯性矩I z = 7a 4/3 。(5分) 8.有如图所示的外伸梁,受载弯曲后,AB 和BC 均发生挠曲,且AB 段截面为矩形,BC 段为正方形,则在B 点处满足的边界条件是应为 w B =0 和 θAB =θBC 。(2分) 班 级 学 号 姓 名 密封装订线 密封装订线 密封装订线 σx σy 1某质点的运动学方程x=6+3t-5t 3 ,则该质点作 ( D ) (A )匀加速直线运动,加速度为正值 (B )匀加速直线运动,加速度为负值 (C )变加速直线运动,加速度为正值 (D )变加速直线运动,加速度为负值 2一作直线运动的物体,其速度x v 与时间t 的关系曲线如图示。设21t t →时间合力作功为 A 1,32t t →时间合力作功为A 2,43t t → 3 C ) (A )01?A ,02?A ,03?A (B )01?A ,02?A , 03?A (C )01=A ,02?A ,03?A (D )01=A ,02?A ,03?A 3 关于静摩擦力作功,指出下述正确者( C ) (A )物体相互作用时,在任何情况下,每个静摩擦力都不作功。 (B )受静摩擦力作用的物体必定静止。 (C )彼此以静摩擦力作用的两个物体处于相对静止状态,所以两个静摩擦力作功之和等于 零。 4 质点沿半径为R 的圆周作匀速率运动,经过时间T 转动一圈,那么在2T 的时间,其平均 速度的大小和平均速率分别为(B ) (A ) , (B ) 0, (C )0, 0 (D ) T R π2, 0 5、质点在恒力F 作用下由静止开始作直线运动。已知在时间1t ?,速率由0增加到υ;在2t ?, 由υ增加到υ2。设该力在1t ?,冲量大小为1I ,所作的功为1A ;在2t ?,冲量大小为2I , 所作的功为2A ,则( D ) A .2121;I I A A <= B. 2121;I I A A >= C. 2121;I I A A => D. 2121;I I A A =< 6如图示两个质量分别为B A m m 和的物体A 和B 一起在水平面上沿x 轴正向作匀减速直线 运动,加速度大小为a ,A 与B 间的最大静摩擦系数为μ,则A 作用于B 的静摩擦力F 的 大小和方向分别为(D ) 轴正向相反与、轴正向相同 与、轴正向相同 与、轴正向相反 与、x a m D x a m x g m x g m B B B B ,,C ,B ,A μμT R π2T R π2T R π2t 传感器与检测技术试卷及答案 ((((试卷一试卷一试卷一试卷一)))) 第一部分选择题(共24 分) 一、单项选择题(本大题共12小题,每小题2 分,共24分)在每小题列出的四个选项中只有一个选项 是符合题目要求的,请将正确选项前的字母填在题后的括号内。错选、多选和未选均无分。 1.下列被测物理量适合于使用红外传感器进行测量的是(C)A.压力B.力矩C.温度D.厚度 2.属于传感器动态特性指标的是( D ) A.重复性B.线性度C.灵敏度D.固有频率 3.按照工作原理分类,固体图象式传感器属于( A )A.光电式传感器B.电容式传感器C.压电式传感器D.磁电式传感器4.测量范围大的电容式位移传感器的类型为(D ) A.变极板面积型B.变极距型 C.变介质型D.容栅型 5.利用相邻双臂桥检测的应变式传感器,为使其灵敏度高、非线性误差小( C ) A.两个桥臂都应当用大电阻值工作应变片 B.两个桥臂都应当用两个工作应变片串联 C.两个桥臂应当分别用应变量变化相反的工作应变片 D.两个桥臂应当分别用应变量变化相同的工作应变片 6.影响压电式加速度传感器低频响应能力的是( D )A.电缆的安装与固定方式B.电缆的长度 C.前置放大器的输出阻抗D.前置放大器的输入阻抗 7.固体半导体摄像元件CCD 是一种() A.PN结光电二极管电路B.PNP 型晶体管集成电路 C.MOS型晶体管开关集成电路D.NPN型晶体管集成电路 8.将电阻R 和电容C 串联后再并联到继电器或电源开关两端所构成的RC吸收电路,其作用是 () A.抑制共模噪声B.抑制差模噪声C.克服串扰D.消除电火花干扰 9.在采用限定最大偏差法进行数字滤波时,若限定偏差△Y≤0.01,本次采样值为0.315,上次 采样值为0.301,则本次采样值Yn应选为() A.0.301 B.0.303 C.0.308 D.0.315 10.若模/数转换器输出二进制数的位数为10,最大输入信号为2.5V,则该转换器能分辨出的最 小输入电压信号为() A.1.22mV B.2.44mV C.3.66mV D.4.88mV 11.周期信号的自相关函数必为() A.周期偶函数B.非周期偶函数C.周期奇函数D.非周期奇函数12.已知函数x(t)的傅里叶变换为X(f),则函数y(t)=2x(3t)的傅里叶变换为() 第二部分非选择题(共76分) 二、填空题(本大题共12小题,每小题1分,共12分)不写解答过程,将正确的答案写在每小 题的空格内。错填或不填均无分。 13.对传感器进行动态的主要目的是检测传感器的动态性能指标。 14.传感器的过载能力是指传感器在不致引起规定性能指标永久改变的条件下,允许超过 的能力。 15.传感检测系统目前正迅速地由模拟式、数字式,向方向发展。 16.已知某传感器的灵敏度为K0,且灵敏度变化量为△K0,则该传感器的灵敏度误差计算公式为rs= 。 17.为了测得比栅距W更小的位移量,光栅传感器要采用技术。 18.在用带孔圆盘所做的光电扭矩测量仪中,利用孔的透光面积表示扭矩大小,透光面积减小,则表明扭矩。19.电容式压力传感器是变型的。 20.一个半导体应变片的灵敏系数为180,半导体材料的弹性模量为1.8×105Mpa,其中压阻系数πL为Pa-1。 21.图像处理过程中直接检测图像灰度变化点的处理方法称为。 22.热敏电阻常数B 大于零的是温度系数的热敏电阻。 23.若测量系统无接地点时,屏蔽导体应连接到信号源的。 24.交流电桥各桥臂的复阻抗分别为Z1,Z2,Z3,Z4,各阻抗的相位角分别为?1? 2? 3 ?4,若电桥平衡条件为Z1/Z4=Z2/Z3,那么相位平衡条件应为。 三、问答题(本大题共6小题,每小题4分,共24分) 25.简述压电式传感器分别与电压放大器和电荷放大器相连时各自的特点。 26.回答与直线式感应同步器有关的下列问题: (1)它由哪两个绕组组成? (2)鉴相式测量电路的作用是什么? 27.简述压磁式扭矩仪的工作原理。 28.说明薄膜热电偶式温度传感器的主要特点。 29.简述激光视觉传感器将条形码的信息传输的信号处理装置的工作过程。 30.采用逐次逼近法的模/数转换器主要由哪几部分组成? ((((答案一答案一答案一答案一)))) 一、单项选择题(本大题共12小题,每小题2分,共24分) 1.C 2.D 3.A 4.D 5.C 6.D 7.C 8.D 9.A 10.B 11.A 12.B 二、填空题(本大题共12小题,每小题1分,共12 分) 三、问答题(本大题共6小题,每小题4分,共24 分) 25.传感器与电压放大器连接的电路,其输出电压与压电元件的输出电压成正比,但容易受电 缆电容的影响。 传感器与电荷放大器连接的电路,其输出电压与压电元件的输出电荷成正比,电缆电容的影响小。 26.(1)由固定绕组和滑动绕组组成。 (2)检测感应电动势的相位,从而根据相位确定位移量的大小和方向。 27.压磁式扭矩仪的轴是强导磁材料。根据磁弹效应,当轴受扭矩作用时,轴的磁导率发生 变化,从而引起线圈感抗变化,通过测量电路即可确定被测扭矩大小。28.主要特点是:热容量小(或热惯性小),时间常数小,反应速度快。29.(1)多面棱镜高速旋转,将激光器发出的激光束反射到条形码上作一维扫描。 (2)条形码反射的光束经光电转换及放大元件接收并放大后再传输给信号处理装置。 30.由电压比较器、数/模转换器、顺序脉冲发生器、数码寄存器和逐次逼近寄存器组成。 四、计算题(本大题共3小题,每小题8分,共24 分) ((((试卷二试卷二试卷二试卷二)))) 一、填空题(每空1分,共15分) 1.如果仅仅检测是否与对象物体接触,可使用_______作为传感器。 2.红外图像传感器由红外敏感元件和_______电路组成。 3.在电阻应变片公式,dR/R=(1+2μ)ε+λEε中,λ代表_______。 4.利用电涡流位移传感器测量转速时,被测轴齿盘的材料必须是_______。 5.当磁头相对于磁尺不动时,仍有感应电动势输出的是静态磁头,且输出电势的幅值由_______所决定。 6.动态标定的目的,是检验测试传感器的_______指标。 7.确定静态标定系统的关键是选用被测非电量(或电量)的标准信号发生器和_______。 8.传感器的频率响应特性,必须在所测信号频率范围内,保持_______条件。 9.热电偶电动势由_______电动势和接触电动势两部分组成。 10.SnO2型半导体气敏器件非常适宜检测浓度较_______的微量气体。 11.有源滤波器由集成运放和_______组成。 12.采用_______电源供电的电桥称为交流电桥。 13.多路模拟开关由_______和多路双向模拟开关组成。 14.为了提高检测系统的分辨率,需要对磁栅、容栅等大位移测量传感器输出信号进行_______。 15.若随机信号x(t)、y(t)的均值都为零,当τ→∞时,它们的互相关函数Rxy(τ)=_______。 二、单项选择题(在每小题的四个备选答案中,选出一个正确答案,并将正确答案的序号填在题 干的括号内。每小题1分,共15 分) 1.对压电式加速度传感器,希望其固有频率( ) A.接近零 B.尽量低些 C.尽量高些 D.任意 2.( )传感器可用于医疗上-50℃~150℃之间的温度测量。大学物理试卷期末考试试题答案
北航传感器考试样题
大学物理试题及答案
工程力学期末考试题及答案
大学物理期末考试经典题型(带详细答案的)
传感器考试题与答案
大学物理期末考试题(上册)10套附答案
工程力学期末复习题
大学物理期末考试题(上册)10套附答案
《传感器原理及应用》试卷样题.
最新工程力学期末考试题及答案
传感器考试试题答案终极版
2018大学物理模拟考试题和答案
西南交通大学历年工程力学期末考试试卷
大学物理期末考试题库
传感器与检测技术试卷及答案
相关主题
文本预览