课程设计报告
课题名称特种电机的结构、控制原理及应用
目录
摘要 ............................................................................................................................................. II ABSTRACT........................................................................................................................................ I II 第1章绪论 . (1)
1.1 课题背景 (1)
1.2 课题意义及主要工作 (1)
第2章步进电动机 (2)
2.1步进电动机的分类、结构及特点 (2)
2.1.1步进电动机的分类 (2)
2.1.2步进电动机的结构及特点 (2)
2.2步进电动机的工作原理、主要参数及特性 (4)
2.2.1步进电动机的工作原理 (4)
2.2.2主要参数及特性 (5)
2.3步进电动机的应用 (6)
第3章三相交流伺服电动机 (7)
3.1交流伺服电动机结构 (7)
3.2交流伺服电动机工作原理 (7)
3.2.1交流伺服电动机工作原理 (7)
3.2.2交流伺服电动机有以下三种转速控制方式 (8)
3.3三相交流伺服电动机的应用 (8)
第4章总结 (9)
参考文献 (10)
谢辞 .................................................................................................................. 错误!未定义书签。
摘要
随着自动化技术、计算机技术、电力电子技术的发展,特别是高性能永磁材料的问世,电动机制造技术水平得到了极大的提高,也为特种电动机的制造、控制和应用提出了更高的要求,提供了更广阔的发展空间。
本旨在通过对特种电动机的构造、调速控制原理及应用的介绍,达到快速学习特种电动机控制技术及应用的目的。本次课题设计着重介绍步进电动机、伺服电动机的的结构、控制原理及应用。
关键词:特种电机、步进电动机、伺服电动机
ABSTRACT
Along with the automation technology, computer technology, the development of power electronic technology, especially the high performance permanent magnetic materials available, motor manufacturing technology level has been greatly improved, but also for the special motor manufacturing, control and application put forward higher request, provided more vast development space.
This aims to construct special motor, speed control principle and application, achieve rapid learning special motor control technology and application for the purpose of. This design introduced the stepper motor, servo motor structure, control principle and application.
Keywords:special motor, stepper motor, servo motor
第1章绪论
1.1 课题背景
当今世界,各种先进的科学技术飞速发展,给人们的生活带来了深远的影响,它极大的改善我们的生活方式。在以特种电机为代表的电力拖动系统的发展更是日新月异,从各个方面影响和改变着我们的生活,而其中的步进电动机、伺服电动机技术的发展更为迅速,已经渗透到了我们生活的各个方面,其发展给我们的生活和生产带来了极大的方便,以致人们已经离不开电动机。
步进电动机是一种将电脉冲信号转换成机械角位移的电磁机械装置,由于所用电源是脉冲电源,所以也称为脉冲马达。步进电动机是一种特殊的电动机,一般电动机通电后连续旋转,而步进电动机则跟随输人脉冲按节拍一步一步地转动。每施加一个电脉冲信号,步进电动机就旋转一个固定的角度,称为一步,每一步所转过的角度叫做步距角。步进电动机的角位移量和输人脉冲的个数成正比,在时间上与输人脉冲同步,因此,只需控制输人脉冲的数量、频率及电动机绕组通电相序,便可获得所需的转角、转速及旋转方向。无脉冲输入时,在绕组电源激励下,气隙磁场能使转子保持原有位置而处于定位状态。
三相交流伺服电动机划分为永磁同步伺服电动机和交流异步伺服电动机。永磁同步伺服电动机和交流异步伺服电动机相比较,有以下特点:(1)永磁同步伺服电动机的造价要比交流异步伺服电机昂贵。(2)永磁同步电动机转子使用永磁材料,所以容量通常限制在5.5KW以下,容量再增大就有困难。而交流异步伺服电动机就没有容量限制这方面的问题。(3)永磁同步伺服电动机当转矩达到一定时,会使永磁体退磁,而交流异步伺服电动机不存在这现象。(4)永磁同步伺服电动机的转子上有永磁体,所以当电动机在高速运行时,永磁体有脱落的危险。(5)永磁同步伺服电动机由于转子使用永磁体构成,所以在运行时转子不产生热量,而三相交流异步伺服电动机的转子则会在运行时产生大量的热,所以在发热状况方面,永磁同步伺服机要比交流异步伺服电机优越。
1.2 课题意义及主要工作
作为专科学校的课题设计报告,事实上无实际利用价值。但从可课题设计中学习到许多专业知识及见识一些其他学科的内容。了解到电气行业的发展,这对于一个马上要毕业的学生来说十分的重要。本次课题设计主要讲了步进电动机、伺服电动机的结构、控制原理及应用。本次课题设计的主要工作主要是续写电机的基本知识。使自己进一步了解步进电动机、伺服电动机的结构、控制原理及应用。
第2章步进电动机
步进电动机是一种将电脉冲信号转换成机械角位移的电磁机械装置,由于所用电源是脉冲电源,所以也称为脉冲马达。步进电动机是一种特殊的电动机,一般电动机通电后连续旋转,而步进电动机则跟随输人脉冲按节拍一步一步地转动。每施加一个电脉冲信号,步进电动机就旋转一个固定的角度,称为一步,每一步所转过的角度叫做步距角。步进电动机的角位移量和输人脉冲的个数成正比,在时间上与输人脉冲同步,因此,只需控制输人脉冲的数量、频率及电动机绕组通电相序,便可获得所需的转角、转速及旋转方向。无脉冲输入时,在绕组电源激励下,气隙磁场能使转子保持原有位置而处于定位状态。
2.1步进电动机的分类、结构及特点
2.1.1步进电动机的分类
步进电动机的种类繁多,有旋转运动的、直线运动的和平面运动的。按作用原理分,步进电机有反应式(磁阻式)、感应子式、永磁式和混合式四大类。按输出功率和使用场合分类,分为功率步进电机和控制步进电机。按定子数目可分为单段定子式(径向式)与多段定子式(轴向式)。按相数可分为两相、三相、四相、五相、六相等。
2.1.2步进电动机的结构及特点
各种步进电机都有定子和转子,但因类型不同,结构也不完全一样。
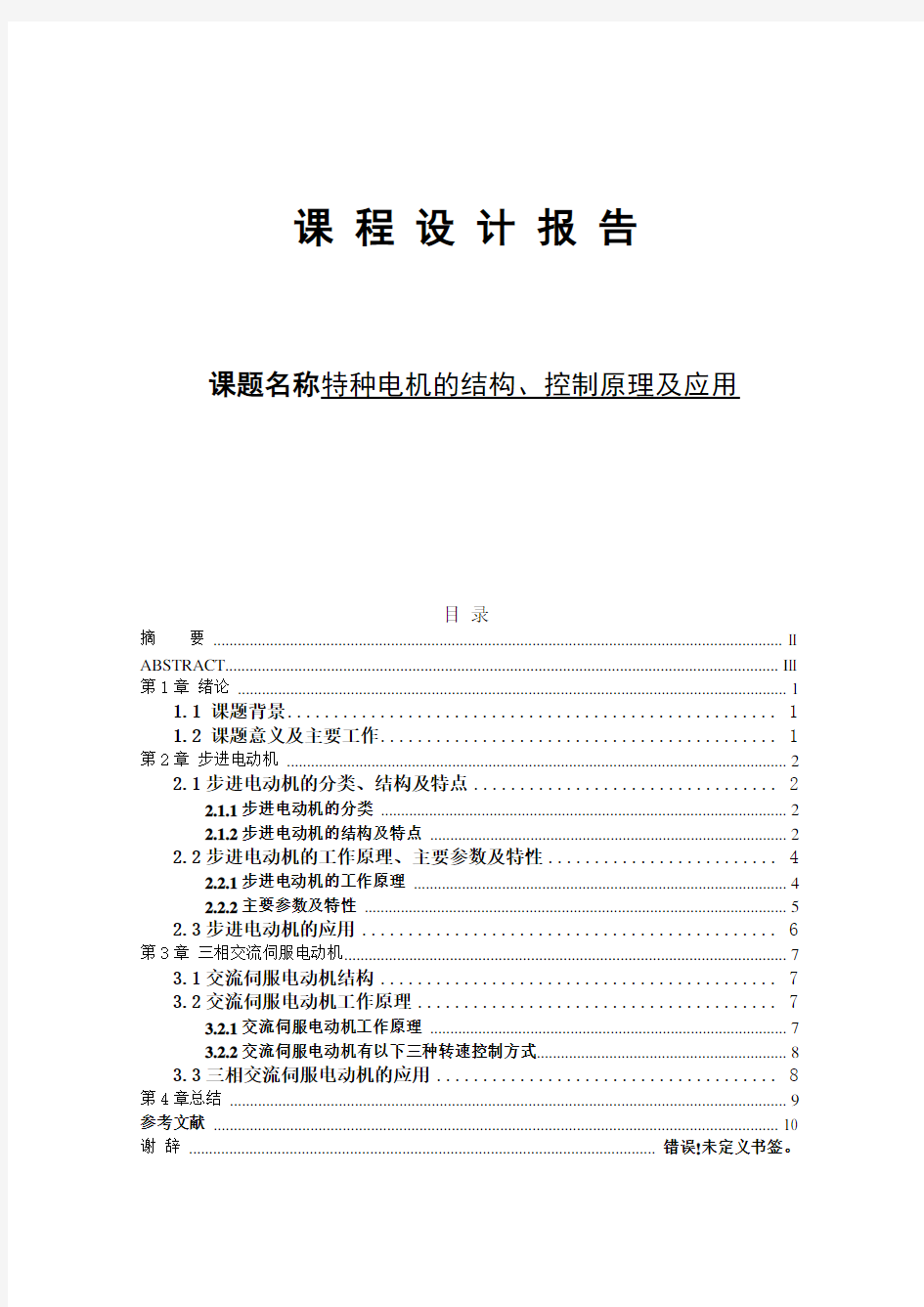
反应式步进电动机的结构如图3–5所示,它由定子1、定子绕组2和转子3组成。图3–5(a)所示为三相单定子径向分相式反应式步进电动机的结构图,定子上有6个均布的磁极,在直径相对的两个极上的线圈串联,构成了一相控制绕组;每个定子极上均布一定数目的齿,齿槽距相等,转子上无绕组,只有均布一定数目的齿,齿槽等宽。图3–5(b)所示为五相多定子轴向分相式反应式步进电动机的结构图,它的定子轴向排列,定子和转子铁心都成五段,每段一相,依次错开排列,每相是独立的,这就是五相反应式步进电动机。
(a)三相单定子径向分相式 (b)五相多定子轴向分相式
图1 反应式步进电动机的结构
1—定子;2—定子绕组;3—转子
感应子式步进电机分为励磁式和永磁式两种。感应子式步进电机的结构与反应式步进电机的结构相似,其定子转子铁心的磁场和齿槽均一样,两者的差别是感应子式步进电机存在轴向恒定磁场。励磁感应子式步进电机是靠转子上的励磁绕组产生轴向磁场;永磁感应子式步进电机的转子由一段环形磁钢(在转子中部)和二段铁心(在环形磁钢的两端),轴向充磁,建立轴向磁场。轴向磁场可以改善步进电机的动态特性,发展趋势将取代反应式步进电机。
永磁式步进电机的转子为永久磁铁,定子为软磁材料,其上有励磁绕组。该种电机有多种结构形式,常用形式有爪极式和隐极式。爪极式步进电机结构一般采用二相或四相绕组;隐极式步进电机结构与反应式步进电机一样,有二、三、四、五相等多种绕组。
混合式步进电动机的结构和工作原理兼有反应式和永磁式两种电动机的特点,由于转子上有磁钢,因此产生同样大小的转矩,需要的励磁电流大大减小;同时它还具有步距角小,起动和运行频率高,不通电时有定位转矩等优点,在小型、经济型数控机床中被广泛应用。
步进电动机用作执行元件具有以下优点:角位移输出与输入的脉冲数相对应,每转一周都有固定步数,在不丢步的情况下运行,步距误差不会长期积累,同时在负载能力范围内,转速仅与脉冲频率高低有关,不受电源电压波动或负载变化的影响,也不受环境条件如温度、气压、冲击和振动等影响,因而可组成结构简单而精度高的开环控制系统。有的步进电动机在停机后某相绕组保持通电状态,即具有自锁能力,停止迅速,不需外加机械制动装置。此外,步距角能在很大的范围内变化、例如从几分到几十度,适合不同传动装置的要求,且在小步距角的情况下,可以不经减速器而获得低速运行,当采用了速度和位置检测装置后也可用于闭环、半闭环伺服系统中。
2.2步进电动机的工作原理、主要参数及特性
2.2.1步进电动机的工作原理
下面以图3–6所示的反应式三相步进电动机为例,来说明步进电动机的工作原理。定子上有6个磁极,分成A 、B 、C 三相,每个磁极上绕有励磁绕组,按串联(或并联)方式联接,使电流产生的磁场方向一致,转子无绕组,它是由带齿的铁心做成的,步进电动机的工作原理与电磁铁相似:当定子绕组按顺序轮流通电时,A 、B 、C 三对磁极就依次产生磁场,每次对转子的某一对齿产生电磁转矩,使它一步步转动。每当转子某一对齿的中心线与定子磁极中心线对齐时,磁阻最小,转矩为零,每次就在此时按一定方向切换定子绕组各相电流,使转子按一定方向一步步转动。
图2反应式三相步进电动机的工作原理图
当A 相通电时,B 相和C 相都不通电,由于磁通总是沿着磁阻最小的路径通过,使转子的1、3齿与定子A 相的两个磁极齿对齐,此时,因转子只受到径向力而无切向力,故转矩为零,转子被锁定在该位置上;随后A 相断电,B 相通电,转子受电磁力的作用,逆时针旋转 30,使2、4齿与B 相磁极齿对齐;若使B 相断电,C 相通电,转子再转 30,使1、3齿与C 转子再转 30,使1、3齿与C 相磁极齿对齐;当C 相断电,A 相再次通电时,2、4齿与A 相磁极齿对齐,转子又转过 30。依此类推,形成步进式旋转。
2.2.2主要参数及特性
步进电机主要评价参数有步距角、最大静态转矩与输出转矩、起动转矩与频率、最高运行频率等。
(1) 步距角
步进电动机的步距角α是步进电动机绕组的通电状态每改变一次,转子转过的角度,它反映了步进电机的分辨能力,决定步进式伺服系统脉冲当量的重要参数。步距角α一般由定子相数、转子齿数和通电方式决定,即
mzk
360=α 式中,m 为步进电机定子相数;z 为步进电机转子齿数;k 为通电方式,相邻两次通电的相数一样,则k =1;反之单双相轮流通电,k =2。
步距角α一般有 375.0, 5.0, 75.0, 9.0, 1,511' , 5.1, 8.1,512' , 3等数十种,其中 75.0, 5.1, 8.1用得较多。
步距精度是指实测的步距角与理论的步距角之差,也称为步距误差。目前国产控制步进电机的步距精度为03~01'±'±,精度较高的可达5~2'±'±,功率步进电机的步距精度为52~02'±'±。
(2) 启动频率q f
空载时,步进电动机由静止状态突然启动,并进入不丢步的正常运行的最高频率,称为启动频率q f 或突调频率。加到步进电动机的指令脉冲频率如果大于启
动频率,就不能正常工作。步进电动机在带负载(尤其是惯性负载)下的启动频率比空载要低,而且随着负载加大,启动频率会进一步降低。
(3) 连续运行频率max f
步进电动机起动以后,其运行速度能跟踪指令脉冲频率连续上升而不丢步的最高工作频率,称为连续运行频率max f 。连续运行频率远大于启动频率,且随着
电动机所带负载的性质、大小而异,也与驱动电源有较大关系。
(4) 静态矩角特性
当步进电机不改变通电状态时,转子处在不动状态,如果在电动机轴上加一个负载转矩T (静态转矩),定子与转子就产生一个角位移θ(失调角),描述静态时静态转矩T 与失调角θ的关系称为矩角特性,如图3–7(a)所示。该特性上电磁转矩的最大值称为最大静转矩。在静态稳定区内,当外加转矩除去时,转子在电磁转矩作用下仍能回到稳定平衡点位置。
(5) 矩频特性与动态转矩
步进电动机的矩频特性描述的是步进电动机连续稳定运行时输出转矩与频率的关系,如图3–7(b)所示。该特性曲线上每一个频率对应的转矩称为动态转矩,
一般情况下,随着运行频率的增高,输出力矩下降,到某一频率后,步进电动机的输出力矩已变得很小,带不动负载或受到一个很小的干扰,步进电动机就会产生振荡、失步或停转。因此,动态转矩的大小直接影响步进电动机的动态性能及带负载的能力。
(6) 加减速特性
步进电动机的加减速特性是描述步进电动机由静止到工作频率和由工作频率到静止的加减速过程中,定于绕组通电状态的变化频率与时间的关系,如图3–7(c)所示。当要求步进电动机起动到大于突跳频率的工作频率时,变化速度必须逐渐上升;同样从最高工作频率或高于突跳频率的工作频率到停止时,变化速度必须逐渐下降。逐渐上升和逐渐下降的加、减速时间不能过小,否则会产生失步或起步。
图3步进电动机的工作特性曲线
2.3步进电动机的应用
由于步进电动机有上述特点和优点而广泛应用在机械、治金、电力、纺织、电信、电子、仪表、化工、轻工、办公自动化设备、医疗、印刷以及航空航天、船舶、兵器、核工业等国防工业等领域。例如机械行业中, 在数控机床上的应用, 可以算是典型的例子。可以说步进电动机是经济型数控机床的核心。而由步进系统实现开环控制, 使得改变加工对象快捷、系统调试方便、工作可靠、成本较低的数控机床成为当前机床发展的主要方向之一。其它行业中应用实例有如: 印刷机械、包装机械、梭织机、电脑绣花机、钟表、户外自动广告牌、自动移靶机、计算机外设、自动绘图仪、吸脂机等。
第3章三相交流伺服电动机
伺服电动机在伺服系统中控制机械元件运转的发动机.是一种补助马达间接变速装置。又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
交流伺服电机是无刷电机,分为同步和异步电机,目前运动控制中一般都用同步电机,它的功率范围大,可以做到很大的功率。大惯量,最高转动速度低,且随着功率增大而快速降低。因而适合做低速平稳运行的应用。
3.1交流伺服电动机结构
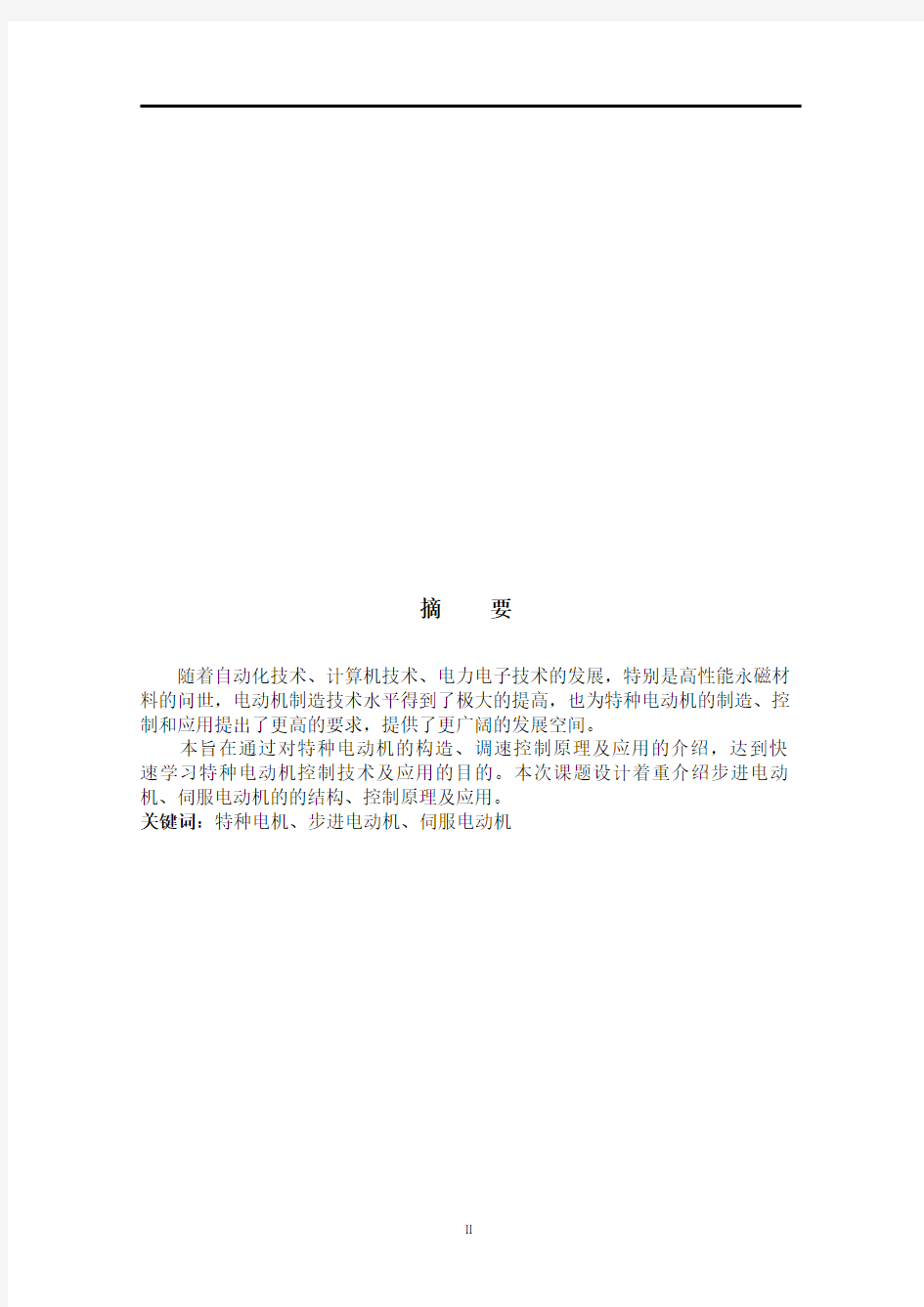
三相交流伺服电动机的定子绕组和单相异步电动机相似,它的定子上装有两个在空间相差90°电角度的绕组,即励磁绕组和控制绕组。运行时励磁绕组始终加上一定的交流励磁电压,控制绕组上则加大小或相位随信号变化的控制电压。转子的结构形式笼型转子和空心杯型转子两种。笼型转子的结构与一般笼型异步电动机的转子相同,但转子做的细长,转子导体用高电阻率的材料作成。其目的是为了减小转子的转动惯量,增加启动转矩对输入信号的快速反应和克服自转现象。空心杯形转子交流伺服电动机的定子分为外定子和内定子两部分。外定子的结构与笼型交流伺服电动机的定子相同,铁心槽内放有两相绕组。空心杯形转子由导电的非磁性材料(如铝)做成薄壁筒形,放在内、外定子之间。杯子底部固定于转轴上,杯臂薄而轻,厚度一般在0.2—0.8mm,因而转动惯量小,动作快且灵敏。
图4 三相交流伺服电动机结构图5 交流伺服电动机原理图
3.2交流伺服电动机工作原理
3.2.1交流伺服电动机工作原理
交流伺服电动机的工作原理和单相异步电动机相似,LL是有固定电压励磁的励磁绕组,LK是有伺服放大器供电的控制绕组,两相绕组在空间相差90°电角度。如果IL与Ik 的相位差为90°,而两相绕组的磁动势幅值又相等,这种状态称为
对称状态。与单相异步电动机一样,这时在气隙中产生的合成磁场为一旋转磁场,其转速称为同步转速。旋转磁场与转子导体相对切割,在转子中产生感应电流。转子电流与旋转磁场相互作用产生转矩,使转子旋转。如果改变加在控制绕组上的电流的大小或相位差,就破坏了对称状态,使旋转磁场减弱,电动机的转速下降。电机的工作状态越不对称,总电磁转矩就越小,当除去控制绕组上信号电压以后,电动机立即停止转动。这是交流伺服电动机在运行上与普通异步电动机的区别。
3.2.2交流伺服电动机有以下三种转速控制方式
(1)幅值控制控制电流与励磁电流的相位差保持90°不变,改变控制电压的大小。
(2)相位控制控制电压与励磁电压的大小,保持额定值不变,改变控制电压的相位。
(3)幅值—相位控制同时改变控制电压幅值和相位。交流伺服电动机转轴的转向随控制电压相位的反相而改变。
3.3三相交流伺服电动机的应用
伺服电动机的工作特性是以机械特性和调节特性为表征。在控制电压一定时,负载增加,转速下降;它的调节特性是在负载一定时,控制电压越高,转速也越高。伺服电动机有三个显著特点:
(1)启动转矩大由于转子导体电阻很大,可使临界转差率Sm>1,定子一加上控制电压,转子立即启动运转
(2)运行范围宽在转差率从0到1的范围内都能稳定运转.
(3)无自转现象控制信号消失后,电动机旋转不停的现象称"自转".自转现象破坏了伺服性,显然要避免.
正常运转的伺服电动机只要失去控制电压后,伺服电动机就处于单相运行状态。由于转子导体电阻足够大,使得总电磁转矩始终是制动性的转矩,当电动机正转时失去Uk(控制电压),产生的转矩为负(0<S<1)。而反转时失去UK,产生的转矩为正(1〈S〈2时〉,不会产生自转现象,可以自行制动,迅速停止运转,这也是交流伺服电动机与异步电动机的重要区别。交流伺服电机的输出功率一般为0.1-100 W,电源频率分50Hz、400Hz等多种。它的应用很广泛,如用在各种自动控制、自动记录等系统中。
第4章总结
本课题论述了步进电动机、三相交流伺服电动机的结构,重点分析了其工作原理的必要性和重要性,简要介绍了它们的应用。重点介绍了步进电动机的工作原理、主要参数及特性,在整理材料之时,进一步学习到电动机发展的历程。使自己对于其的了解进一步加深。通过本次课程设计,初步了解到其设计的工作原理及应用。
由于设计研发时间仓促,作者的水平有限,该课程设计还有一些不足之处,具体体现在以下几点:
(1)课题设计报告重点偏重于文字叙述,缺少必要的图片、公式、图表等加以详解分析说明。
(2)课题设计报告叙述不够简单明了,其内容部分老旧、没有足够的资料加以说明,只是摘取前人的内容。不能体现时代发展的成果及最新成就。
参考文献
[1] 三相异步电动机原理设计与试验[S] ,北京:科学出版社,1977.
[2] 陈世坤主编 .电机设计[M].机械工业出版社.
[3] 胡虔生 .胡敏强编著.电机学[M].中国电力出版社.
[4] 李隆年王宝玲周汝潢编著.电机设计[M].机械工业出版社.
[5] 郭庆鼎孙宜标王丽梅编著.现代永磁电动机交流伺服系统[M].机械
出版社
[6] 郭庆鼎王成元编著.交流伺服系统[M].中国机械出版社.
[7] 何超 .交流变频调速技术 [M].中国机械出版社.
[8] 张生果 .电机保护的现状和展望.维普资讯
https://www.doczj.com/doc/5418643505.html,
[9] 伍玩秋 . 三相异步电机过热故障的原因及一般处理方法.维普资讯
https://www.doczj.com/doc/5418643505.html,
[10] 邹健 . 解决电机温升问题的一点体会[J].《中小型电机》,1998, 25 (3).
[11] 杨渝钦. 控制电机 [M].北京:机械工业出版社
[12] 王芳楷 .网络化中小型三相异步电动机PDM系统[D].广东工业大学学位论文,2005 .
[13] 周小涵. 三相异步电动机效率低的原因及改进方法[R].(攀钢动力厂四川攀枝花617062).
[14] 季杏法主编 .小型三相异步电动机技术手册[M].机械工业出版社.
智能控制理论简述 智能控制(intelligent controls)在无人干预的情况下能自主地驱动智能机器实现控制目标的自动控制技术。智能控制是指驱动智能机器自主地实现其目标的过程,即无需人的直接干预就能独立地驱动智能机器实现其目标。其基础是人工智能、控制论、运筹学和信息论等学科的交叉,也就是说它是一门边缘交叉学科。 控制理论发展至今已有100多年的历史,经历了“经典控制理论”和“现代控制理论”的发展阶段,已进入“大系统理论”和“智能控制理论”阶段。智能控制理论的研究和应用是现代控制理论在深度和广度上的拓展。20世纪80年代以来,信息技术、计算技术的快速发展及其他相关学科的发展和相互渗透,也推动了控制科学与工程研究的不断深入,控制系统向智能控制系统的发展已成为一种趋势。 近20年来,智能控制理论(IntelligentControl Theory)与智能化系统发展十分迅速[1].智能控制理论被誉为最新一代的控制理论,代表性的理论有模糊控制(Fuzzy Control)、神经网络控制(Neural Networks Control)、基因控制即遗传算法(Genetic Aigorithms)、混沌控制[2](Chaotic Control)、小波理论[3](Wavelets Theo-ry)、分层递阶控制、拟人化智能控制、博奕论等.应用智能控制理论解决工程控制系统问题,这样一类系统称为智能化系统。它广泛应用于复杂的工业过程控制[4]、机器人与机械手控制[5]、航天航空控制、交通运输控制等.它尤其对于被控对象模型包含有不确定性、时变、非线性、时滞、耦合等难以控制的因素.采用其它控制理论难以设计出合适与符合要求的系统时,都有可能期望应用智能化理论获得满意的解决。 自从“智能控制”概念的提出到现在,自动控制和人士_智能专家、学者们提出了各种智能控制理论,下面对一些有影响的智能控制理论进行介绍。 (1)递阶智能(Hierarchical IntelligentControl) 阶智能控制是由G.N.Saridis提出的,它是最早的智能控制理论之一。它以早期的学习控制系统为基础,总结人工智能与自适应控制、自学习控制和自组织控制的关系后逐渐形成的。递阶智能控制遵循“精度随智能降低而提高”的原理分级分布。该控制系统由组织级、协调级、执行级组成。在递阶智能控制系统中,
文章编号:100926825(2009)1920059202 结构振动控制理论与应用现状分析 收稿日期:2009203206 作者简介:徐 飙(19702),男,工程硕士,高级工程师,中水淮河规划设计研究有限公司,安徽蚌埠 233000 徐 飙 摘 要:主要介绍了结构振动控制的概念、基本原理以及分类,阐述了被动控制、主动控制、半主动控制和混合控制的不同特点,最后对结构振动控制的应用现状和发展前景做了展望。关键词:结构振动控制,概念,基本原理,分类,应用现状中图分类号:TU312文献标识码:A 传统结构抗震设计是通过加大构件尺寸、提高材料强度等来 加强结构自身的抗震能力,这些方法除了对地震烈度的适应性不佳外,保护目标也比较单一,而且使结构造价大大增加,随着社会的发展,工程结构形式日益多样化,高层和高耸结构也层出不穷。对高层建筑和高耸结构来说,水平荷载是主要荷载之一,并且往往起着控制作用,而对大跨度空间结构来说,竖向荷载却是主要控制荷载。水平荷载一般包括风荷载和地震荷载,这两种荷载都是动力荷载。随着高层建筑和高耸结构高度与高宽比的增大以及轻质高强材料的作用,其刚度和阻尼不断降低,在强风或强烈地震荷载作用下,结构物的动力反应强烈,很难满足结构舒适性和安全性的要求[1]。按照传统的抗风抗震设计方法,即通过提高结构本身的强度和刚度来抵御风荷载或地震作用,是一种“硬碰硬”式的抗震方法,它很不经济,也不一定安全,而且失去了轻质高强材料自身的优势,还不能满足日益现代化的机器设备不能因为剧烈振动而中断工作或者破坏的要求。 传统的抗震设计方法已不能满足需要,从而使结构振动控制 理论在工程结构中开始得到应用。结构振动控制可以有效地减轻结构在风和地震等动力作用下的反应和损伤,提高结构的抗震 能力和抗灾性能,是抗震减灾积极有效的对策。 1 振动控制的概念及原理自1972年美籍华裔学者姚治平(J ?T ?P ?Y ao )教授明确提出土木工程结构控制的概念以来,国内外很多学者在结构控制的方法、理论、试验和应用等方面取得了大量研究成果。隔震消能和各种减震控制体系具有传统抗震体系所难以比拟的优越性,即明显有效减震(能使结构地震响应减到10%或更低),其中已有多项技术成功地应用于工程实践。国际上,美国、日本、澳大利亚、新西 兰和法国等国家在这方面走在前列。国内学者自20世纪80年代 初期以来,对夹层橡胶垫隔震结构、粘弹性阻尼器、TMD 和TLD 、耗能支撑、层间隔震、主动控制等方面的研究取得了一系列成果。经过20多年的发展,结构控制现在正朝着研制高效的被动控制 装置、发展以参数控制为主的半主动控制和探索结构智能控制的 方向发展。结构控制的概念几经完善,具体可表述为:在工程结 构的特定部位装设某种装置(例如隔震垫等)或某种机构(例如消 能支撑、消能剪力墙、消能节点、消能器等)或某种子结构(例如调 频质量等)或施加外力(外部能量输入)或调整结构的动力特性, 使工程结构在地震(或风)的作用下,其结构的动力响应(加速度、速度、位移)得到合理的控制,确保结构本身及结构中的人员仪器设备的安全和处于正常的使用环境状况[2]。 控制系统的基本元素为传感器、处理器(也称控制器)和作动器。传感器感受外部激励及结构反应的变化信息,处理器接受这 些信息并依据一定的控制算法计算所需控制力,作动器则产生所需的控制力并作用到结构上,从而实现对结构的控制。 2 振动控制的分类 依据是否需要外界能源,结构控制可分为被动控制、主动控 制、半主动控制和混合控制四类[3] 。被动控制也称无源控制,它不需要外部输入能量,仅通过控制系统改变结构系统的动力特性达到减轻动力响应的目的。而主动控制的过程则依赖于外界激励和结构响应信息,并需要外部输入能量,提供“控制力”。半主动控制也利用结构响应或外界激励信息,但仅需要输入少量能量以改变控制系统形态,达到改变结构动力特性从而减轻响应的目的。混合控制(也称杂交控制)指的是上述三类控制的混合应用,在结构上同时施加主动和被动控制,整体分析其响应,既克服纯被动控制的应用局限,也减小控制力,进而减小外部控制设备的功率、体积、能源和维护费用,增加系统的可靠性[4]。 2.1 被动控制 结构被动控制是一种无源控制方法,包括隔震、吸振和耗能三大控制形式,采用直接减少、隔离、转移、消耗能量的方法达到 减小结构振动的目的。在我国,20世纪50年代就提出基础隔震 思想,80年代末结构控制方面的研究正式起步。由于被动控制易 于工程实现,设计得好,效果不错,受到普遍重视。 结构隔震体系是指在结构物底部与基础面(或底部柱顶)之间设置某种隔震装置而形成的结构体系。它包括上部结构、隔震装置和下部结构三部分。为了达到明显的减震效果,隔震装置或隔震体系必须具备下述四项基本特性:1)承载特性;2)隔震特性;3)复位特性;4)阻尼消能特性。 吸振减震是指在主体结构上附加吸振器子系统,用以减小主结构的振动。吸振器是包括质量系和弹簧系的小型振动系统,以质量系产生的惯性力作为控制力,通过弹簧系作用于主结构。常与粘滞阻尼器联合使用,并以阻尼器命名。 耗能减震是指利用各种阻尼元件、吸能部件或摩擦支撑产生的阻尼力、塑性变形或摩擦力来衰减结构在外界干扰(如风荷载和地震荷载等)下的振动响应,具有耗能能力强、低周疲劳性能好的特点。结构消能减震的实质是,在结构内设置消能构件(或消能装置),它们能为结构提供较大的阻尼,在地震时大量消耗输入结构的振动能量,有效衰减结构的地震反应。2.2 主动控制结构主动控制是利用外部能源(计算机控制系统或智能材料),在结构物受激励振动过程中,瞬时施加控制力或瞬时改变结 构的动力特性,以迅速衰减和控制结构振动反应的一种减震技术。主要应用于对抗震抗风要求较高,要求对多振型进行控制的 ? 95? 第35卷第19期2009年7月 山西建筑SHANXI ARCHITECTURE Vol.35No.19J ul. 2009
国内外特种电机的种类及使用 一、特种电机的概念: 电机作为驱动的主要动力源,广泛应用于工业、农业、国防、公共设施、家用电器等各个领域。特种电机指为了满足各类机械设备对其拖动电机性能要求的不同,而专门针对某一类型的机械设备特殊需要而单独设计、制造的特殊专用电机,国民经济的增长为特种电机行业的持续快速发展奠定了良好的基础。 二、特种电机的种类 特种电机主要分为:新型旋转电机、直线电机、非电磁类电机三类。 1、新型旋转电机 (1)永磁无刷电机: 无刷电机的定义:一切具有直流电机外部特性的,采用电子换相的电机统称为“无刷电机”。无刷电机的优点:1、无电刷、低干扰。无刷电机去除了电刷,最直接的变化就是没有了有刷电机运转时产生的电火花,这样就极大减少了电火花对遥控无线电设备的干扰。2、噪音低,运转顺畅。无刷电机没有了电刷,运转时摩擦力大大减小,运行顺畅,噪音会低许多,这个优点对于模型运行稳定性是一个巨大的支持3、寿命长,低维护成本。少了电刷,无刷电机的磨损主要是在轴承上了,从机械角度看,无刷电机几乎是一种免维护的电动机了,必要的时候,只需做一些除尘维护即可。 (2)新型开关磁阻电机:开关磁阻电机是一种新型调速电机,调速系统兼具直流、交流两类调速系统的优点,是继变频调速系统、无刷直流电动机调速系统的最新一代无极调速系统。它的结构简单坚固,调速范围宽,调速性能优异,且在整个调速范围内都具有较高效率,系统可靠性高。它具有两个基本特征:(l)开关性——电机必须工作在一个连续的开关模式,这也是为什么在各种新型功率半导体器件可以获得后这种电机才得以发展的主要原因。(2)磁阻性——定、转子具有可变磁阻回路,是真正的磁阻电机。 (3)磁悬浮电机:磁悬浮电动机是一种具有轴承支承功能的特殊电动机,它在运行时,不需要任何独立的轴承支承,因此具有无摩擦和磨损,无润滑油污染,寿命长等一系列优点。 (4)复式永磁电机:复式永磁同步电机将2个盘式电机的定子与外转子电机的定子构成一体,3个转子构成一个全封闭的筒形,将定子包围在其内部,它充分地利用了外转子式电机2个端面的空间。一般工况下该电机的输出功率不大,但输出转矩很大;因此,该结构电机以低速大转矩为主要特征,非常适合油田抽油等
(三)特种电机知识 1.测速发电机是一种反映转速信号的电器元件,它的作用是将输入的机械转速变换成电压信号输出。(√) 2.测速发电机分为交流和直流两大类。(√) 3.直流测速发电机的结构与直流伺服电动机基本相同,原理与直流发电机相似。(√) 4.直流测速发电机由于存在电刷和换向器的接触结构,所以寿命较短,对无线电有干扰。(√)5.永磁式测速发电机的转子是用永久磁铁制成的。(×) 6.他励式直流测速发电机的结构简单,应用较为广泛。(√) 7.直流测速发电机的工作原理与一般直流发电机有区别。(×) 8.直流测速发电机的输出电压与转速成正比,转向改变将引起输出电压极性的改变。(√)9.测速发电机在自动控制系统和计算装置中,常作为电源来使用。(×) 10.电磁式直流测速发电机虽然复杂,但因励磁电源是外加的,不受环境等因素的影响,其输出电动势斜率高,特性线性好。(×) 11.永磁式测速发电机的输出电动势具有斜率高、特性呈线性、无信号区小或剩余电压小、正转和反转时输出电压不对称度小、对温度敏感低等特点。(√) 12.测速发电机主要应用于速度伺服、位置伺服和计算解答等三类控制系统。(×) 13.交流测速发电机的主要特点是其输。出电压与转速成正比。(√) 14.交流测速发电机可分为永磁式和电磁式两种。(×) 15.交流测速发电机的励磁绕组必须接在频率和大小都不变的交流励磁电压上。(√) 16.交流测速发电机有异步式和同步式两类,应用较为广泛的是交流异步测速发电机。(√)17.交流测速发电机的杯形转子由铁磁材料制成。当转子不转时,励磁后由杯形转子电流产生的磁场与输出绕组轴线垂直,输出绕组不产生感应电动势。(×) 18.交流测速发电机不能判别旋转方向。(×) 19.在计算解答系统中,为了满足误差小、剩余电压低的要求,交流同步测速发电机往往带有温度补偿及剩余电压补偿电路。(×) 20.测速发电机作计算元件使用时,应着重考虑其线性误差要小,电压稳定性要好,线性误差一般要求δx≤0.05%~0.1%。(√) 21.直流伺服电动机不论是他励式还是永磁式,其转速都是由信号电压控制的。(√) 22.交流伺服电动机为克服自转现象,广泛采用空心杯形转子。(√)
现代控制理论及应用李嗣福教授、博士生导师 中国科学技术大学自动化系
一、现代控制理论及应用发展简介 1. 控制理论及应用发展概况 2. 自动控制系统和自动控制理论 以单容水槽水位控制和电加热器温度控制为例说明什么是自动控制、控制律(或控制策略)、自动控制系统以及自动控制系统组成结构和自动控制理论所研究的内容。 2.1自动控制:利用自动化仪表实现人的预期控制目标。 2.2自动控制系统及其组成结构 自动控制系统:指为实现自动控制目标由自动化仪表与被控对象所联接成闭环系统。 自动控制系统组成结构:是由被控对象、测量代表、控制器或调节器和执行器构成反馈闭环结构,其形式有单回路形式和串级双回路形式。 控制系统性能指标:定性的有稳(定性)、准(确性)、快(速性)。 控制律(或控制策略、控制算法):控制系统中控制器或调节器所采用的控制策略,即用系统偏差量如何确定控制量的数学表示式。 2.3自动控制系统类型主要有:按系统参数输入信号形式分:定值控制系统或调节系统和随动系统。 按系统结构形式分:前馈控制系统(即开环系统)和反馈控制系统以及复合控制系统; 按系统中被控对象的控制输入量数目和被控输出量数目分:单变量控制系统和多变量控制系统; 按被控对象特性分:线性控制系统和非线性控制系统; 按系统中的信号形式分:模拟(或时间连续)控制系统、数字(或时间离散)控制系统以及混合控制系统。 2.4自动控制理论:研究自动控制系统分析与综合设计的理论和方法。 3. 古典(传统)控制理论: 采用数学变换方法(即拉普拉斯变换和富里叶变换)按照系统输出量
与输入量之间的数学关系(即系统外部特性)研究控制系统分析和综合设计问题。具体方法有:根轨迹法;频率响应法。 主要特点:理论方法的物理概念清晰,易于理解;设计出控制律一般较简单,易于仪表实现 主要缺点: ① 设计需要凭经验试凑,设计结果与设计经验关系很大; ② 系统分析和设计只着眼于系统外部特性; ③一般只能处理单变量系统分析和设计问题,而不能处理复杂的多变量系统分析和设计。 4. 现代控制理论及其主要内容 现代控制理论:狭义的是指60年代发展起来的采用状态空间方法研究实现最优控制目标的控制系统综合设计理论。广义的是指60年代以来发展起来的所有新的控制理论与方法。 控制系统状态空间设计理论: (1) 用一阶微方程组表征系统动态特性,一般形式(连续系统)为 )()()(t BU t AX t X +=——状态方程(连续的一阶微分方程组) )()(t CX t Y =——输出方程 离散系统: )()()1(t BU t AX k X +=+——状态方程(离散的一阶差分方程组) )()(k CX k Y = k ——为大于等于零整数,表示离散时间序号; ?????? ??? ???=)() ()()(21k x k x k x k X n ——状态向量,其中)(k x i ,()n i ,,1 =为状态变量; ????? ???? ???=)() ()()(21k u k u k u k U m ——输入向量,其中)(k u i , ()m i ,,1 =为各路输入;
1.无刷直流电动机系统的组成、工作原理、特点。P6、11、14 2.无刷直流电动机系统是一种自控式逆变器,它的输出频率不是独立调节的, 而是受控于转子位置信号。 3.位置检测器的作用是什么?常用的有位置检测器有哪几种形式?P10 4.在无刷直流电动机系统中,控制器主要完成哪些功能?P11 5.三相无刷直流电动机的主电路形式有哪几种?P16 6.简述无位置传感器位置检测方法中反电动势过零检测的原理、电路结构及各 部分作用。P48~49、P70 7.什么是无刷直流电动机的转矩脉动,如何抑制换相转矩脉动?P29、P33 8.无刷直流电动机系统的PWM方式有几种?各有何特点?P42 9.简述用单片机作为控制器的优点及单片机的选择原则。P58 10.设计基于单片机的BLDCM控制系统时要解决哪些问题。P50 11.SRD调速系统由哪些部分组成?电机结构怎样?P80 12.开关磁阻电机的运行原理是什么? 13.如何计算SRD的极距角和步距角?P82 14.为什么说SRD的调速性能好?其不足是什么?P86 15.试列出基于理想线性模型的SR电机绕组电感随定转子相对位置变化的曲线。 16.什么是SRD的APC控制?P99 17.为什么开关磁阻电动机常采用两相启动方式?P102 18.电容分压型主电路的工作过程,特点。 19.SR系统中开关器件的选型原则是什么?P107 20.如何设计SRD光电式转子位置信号检测器? 21.什么是SRD的角度细分控制?硬件细分和软件细分的工作原理?P112 22.简述脉冲测速的三种方法,测量原理及适用范围。 23.霍尔电位传感器检测电路图2-66各参数是如何确定的? 24.简述反应式步进电动机的工作原理及特点。 25.如何计算步进电动机的齿距角和步距角? 26.什么是步进电机的自锁能力? 27.什么是步进电机极限启动转矩?如何提高Tst? 28.为什么步进电机的转矩特性成下降趋势? 29.步进电动机功率驱动电路形式,特点。P162~164 30.什么是步进电机的角度细分控制?细分控制有何作用? 31.试分析步进电机斩波恒流驱动电路的工作原理。 32.试比较SR电机角度细分控制与步进电动机角度细分控制的差异。 33.步进电动机的运行速度与哪些参数有关?如何进行速度控制和位置控制? 34.步进电动机的驱动控制器组成,单片机作为脉冲分配器的三种应用形式。
第二章 数字控制系统的组成 第一节 数字控制系统硬件及软件组成 一、 硬件部分 计算机控制系统的硬件包括主机、接口电路、过程输入/输出通道、外部设备、操作台等。 1、主机 它是过程计算机控制系统的核心,由中央处理器(CPU)和内存储器组成。主机根据输入通道送来的被控对象的状态参数,按照预先制定的控制算法编好的程序,自动进行信息处理、分析、计算,并作出相应的控制决策,然后通过输出通道发出控制命令,使被控对象按照预定的规律工作。 2、接口电路 它是主机与外部设备、输入/输出通道进行信息交换的桥梁。在过程计算机控制系统中,主机接收数据或者向外发布命令和数据都是通过接口电路进行的,接口电路完成主机与其它设备的协调工作,实现信息的传送。 3、过程输入/输出通道 过程输入输出(I/O)通道在微机和生产过程之间起着信号传递与变换的纽带作用,它是主机和被控对象实现信息传送与交换的通道。 模拟量输入通道把反映生产过程或设备工况的模拟信号转换为数字信号送给微机;模拟量输出通道则把微机输出的数字控制信号转换为模拟信号(电压或电流)作用于执行设备,实现生产过程的自动控制。微机通过开关量(脉冲量、数字量)输入通道输入反映生产过程或设备工况的开关信号(如继电器接点、行程开关、按纽等)或脉冲信号;通过开关量(数字量)输出通道控制那些能接受开关(数字)信号的电器设备。 1)、模拟量输入(AI)通道: 生产过程中各种连续的物理量(如温度、流量、压力、液位、位移、速度、电流、电压以及气体或液体的PH值、浓度、浊度等),只要由在线仪表将其转换为相应的标准模拟量电信号,均可送入模拟量输入通道进行处理。 2)、模拟量输出(AO)通道: 模拟量输出通道一般是输出4~20mA(或1~5V)的连续的直流电流信号,用来控制各种直行程或角行程电动执行机构的行程,或通过调速装置(如各种变频调速器)控制各种电机的转速,亦可通过电-气转换器或电-液转换器来控制各种气动或液动执行机构,例如控制气动阀门的开度等等。 3)、开关量输入(DI)通道: 用来输入各种限位(限值)开关、继电器或电磁阀门连动触点的开、关状态;输入信号可以是交流电压信号、直流电压信号或干接点信号。 4)、开关量输出(DO)通道: 用于控制电磁阀门、继电器、指示灯、声报警器等只具有开、关两种状态的设备。输出形式一般为无源触点和有源OC门两种。
自动控制、现代控制与智能控制的关系 一、基本区别 控制理论发展至今已有100多年的历史,经历了“经典控制理论”和“现代控制理论”的发展阶段,已进入“大系统理论”和“智能控制理论”阶段。智能控制理论的研究和应用是现代控制理论在深度和广度上的拓展。20世纪80年代以来,信息技术、计算技术的快速发展及其他相关学科的发展和相互渗透,也推动了控制科学与工程研究的不断深入,控制系统向智能控制系统的发展已成为一种趋势。 自动控制理论中建立在频率响应法和根轨迹法基础上的一个分支。经典控制理论的研究对象是单输入、单输出的自动控制系统,特别是线性定常系统。经典控制理论的特点是以输入输出特性(主要是传递函数)为系统数学模型,采用频率响应法和根轨迹法这些图解分析方法,分析系统性能和设计控制装置。经典控制理论的数学基础是拉普拉斯变换,占主导地位的分析和综合方法是频率域方法。建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分。 在现代控制理论中,对控制系统的分析和设计主要是通过对系统的状态变量的描述来进行的,基本的方法是时间域方法。现代控制理论比经典控制理论所能处理的控制问题要广泛得多,包括线性系统和非线性系统,定常系统和时变系统,单变量系统和多变量系统。它所采用的方法和算法也更适合于在数字计算机上进行。现代控制理论还为设计和构造具有指定的性能指标的最优控制系统提供了可能性。 智能控制(intelligent controls)在无人干预的情况下能自主地驱动智能机器实现控制目标的自动控制技术。 二、华山论剑:自动控制的机遇与挑战 传统控制理论在应用中面临的难题包括:(1)传统控制系统的设计与分析是建立在已知系统精确数学模型的基础上,而实际系统由于存在复杂性、非线性、时变性、不确定性和不完全性等,一般无法获得精确的数学模型;(2)研究这类系统时,必须提出并遵循一些比较苛刻的假设,而这些假设在应用中往往与实际不相吻合;(3)对于某些复杂的和包含不确定性的对象,根本无法用传统数学模型来表示,即无法解决建模问题;(4)为了提高性能,传统控制系统可能变得很复杂,从而增加了设备的初始投资和维修费用,降低了系统的可靠性。 为了讨论和研究自动控制面临的挑战,早在1986年9月,美国国家科学基金会(NSF)及电气与电子工程师学会(1EEE)的控制系统学会在加利福尼亚州桑克拉拉大学(University of Santa Clare)联合组织了一次名为“对控制的挑战”的专题报告会。有50多位知名的自动控制专家出席了这一会议。他们讨论和确认了每个挑战。根据与会自动控制专家的集体意见,他们发表了《对控制的挑战——集体的观点》,洋洋数万言,简直成为这一挑战的宣言书。 到底为什么自动控制会面临这一挑战,还面临哪些挑战,以及在哪些研究领域存在挑战呢? 在自动控制发展的现阶段,存在一些至关重要的挑战是基于下列原因的:(1)科学技术
●专家论谈 智能控制理论及应用的发展现状 杭州浙江大学工业控制技术研究所 (310027) 许晓鸣 孙优贤上海交通大学自动化系 (200030) 熊 刚 在控制工程实践中,人们常常涉及到传感器、执行器、通信系统、计算机以及控制策略和具体算法。它们构成的控制系统可以比拟成一个人,如图1。传感器用来采集反映被控对象特性的信息,它就象人的五官;执行器用来把控制决策命令施加于被控对象,它好比人的四肢;通信技术把传感器采集到的信息及时送到控制器,就象人们的神经系统;计算机是控制器的硬件环境,就象人的脑袋。这四部分在控制系统设计中占去人们大部分精力, 但是控制策略和具体算法就好象人的大脑一样,是控制系统的“指挥中心”。设计尽量“聪明”和适用的控制算法是控制理论发展的动力和内容。 图1 控制系统的构成框图 1 智能控制的兴起 111 自动控制的发展与挫折 本世纪40~50年代,以频率法为代表的单变量系统控制理论逐步发展起来,并且成功地用在雷达及火力控制系统上,形成了今天所说的“古典控制理论”。60~70年代,数学家们在控制理论发展中占了主导地位,形成了以状态空间法为代表的“现代控制理论”。他们引入了能控、能观、满秩等概念,使得控制理论建立在严密精确的数学模型之上,从而造成了理论与实践之间的巨大分歧。70年代后,又出现了“大系统理论”。但是,由于这种理论解决实际问题的能力更弱,它很快被人们放到了一边。112 人工智能的发展 斯坦福大学人工智能研究中心的N ilsson 教授认为:“人工智能是关于知识的科学——怎样表示知识以及怎样获得知识并使用知识的科学”。M IT 的W in ston 教授指出:“人工智能就是研究如何使计算机去做过去只有人才做的智能性工作”。 1956年以前是人工智能的萌芽期。英国数学家图灵(A 1M 1T u ring 1912 ~1954)为现代人工智能作了大量开拓性的贡献;1956年~1961年是人工智能的发展期,人们重点研究了诸如用机器解决数学定义,通用问题求解程序等。1961年以后人工智能进入了飞跃期,主要内容涉及知识工程、自然语言理解等。 人们研究人工智能方法也分为结构模拟派和功能模拟派,分别从脑的结构和脑的功能入手进行研究。113 智能控制的兴起 建立于严密的数学理论上的控制理论发展受到挫折,而模拟人类智能的人工智能却迅速发展起来。 控制理论从人工智能中吸取营养求发展成为必然。 工业系统往往呈现高维、非线性、分布参数、时变、不确定性等复杂特征。特别是非线性对控制结果的影响复杂,控制工程人员很难深入理解,更谈不上设计出合适的控制算法。不确定性是最难以解决的问题,也是导致大系统理论失败的根本原因。但是,对这些问题用工程控制专家经验来解决则往往是成功的。人是最聪明的控制器,模仿人是一种途径。 萨里迪斯(Saridis )于1977年提出了智能控制的三元结构定义,即把智能控制看作为人工智能、自动控制和运筹学的交点。在智能控制发展初期,美国普渡大学的傅京孙(K 1S 1Fu )教授首先提出了学习控制的概念,引入了人工智能的直觉推理。后来在人工智能的概念模拟基础上,发展了许多智能控制方法,如自整定、参数调整P I D 等。再后来则以发展实用的智能控制算法为主,尤以专家系统和神经元网络最为突出。 2 智能控制的发展框架 图2 智能控制的发展框架 现在有关智能控制方面的论文很多,我们可以把
控制电机与特种电机课后答案第4章思考题与习题 1. 旋转变压器由_________两大部分组成。( ) A.定子和换向器 B.集电环和转子 C.定子和电刷 D.定子和转子 2. 与旋转变压器输出电压呈一定的函数关系的是转子( )。 A.电流 B. 转角 C.转矩 D. 转速 3(旋转变压器的原、副边绕组分别装在________上。( ) A(定子、转子 B.集电环、转子 C.定子、电刷 D. 定子、换向器 4(线性旋转变压器正常工作时,其输出电压与转子转角在一定转角范围内成________。 5、试述旋转变压器变比的含义, 它与转角的关系怎样? 6、旋转变应器有哪几种?其输出电压与转子转角的关系如何, 7、旋转变压器在结构上有什么特点?有什么用途。 8、一台正弦旋转变压器,为什么在转子上安装一套余弦绕组?定子上的补偿绕组起什么作用? 9、说明二次侧完全补偿的正余弦旋转变压器条件,转子绕组产生的合成磁动势和转子转角α有何关系。 10、用来测量差角的旋转变压器是什么类型的旋转变压器? 11、试述旋转变压器的三角运算和矢量运算方法. 12、简要说明在旋转变压器中产生误差的原因和改进方法。 答案 1. D 2. B 3. A 4. 正比
5. 旋转变压器的工作原理和一般变压器基本相似,从物理本质来看,旋转变压器可以看成是一种能转动的变压器。区别在于对于变压器来说,其原、副边绕组耦合位置固定,所以输出电压和输入电压之比是常数,而旋转变压器的原、副边绕组分别放置在定、转子上,由于原边、副边绕组间的相对位置可以改变,随着转子的转动,定、转子绕组间的电磁耦合程度将发生变化,电磁精确程度与转子的转角有关,因此,旋转变压器能将转角转换成与转角成某种函量关系的信号电压。输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。 6. 按着输出电压和转子转角间的函数关系,旋转变压器主要可以分:正、余弦旋转变压器(代号为XZ)和线性旋转变压器(代号为XX)、比例式旋转变压器(代号为XL),矢量旋转变压器(代号为XS)及特殊函数旋转变压器等。其中,正余弦旋转变压器当定子绕组外加单相交流电流激磁时其输出电压与转子转角成正余弦函数关系;线性旋转变压器的输出电压在一定转角范围内与转角成正比,线性旋转变压器按转子结构又分成隐极式和凸极式两种;比例式旋转变压器则在结构上增加了一个固定转子位置的装置,其输出电压也与 转子转角成比例关系。 按旋转变压器在系统中用途可分为解算用旋转变压器和数据传输用旋转变压器。根据数据传输用旋转变压器在系统中的具体用途,又可分为旋变发送机(代号为XF),旋变差动发送机(代号为XC),旋变变压器(又名旋变接收器)(代号为XB)。 若按电机极对数的多少来分, 可将旋转变压器分为单极对和多极对两种。采用多极对是为了提高系统的精度。
课程设计报告 课题名称特种电机的结构、控制原理及应用 目录 摘要 ............................................................................................................................................. II ABSTRACT........................................................................................................................................ I II 第1章绪论 . (1) 1.1 课题背景 (1) 1.2 课题意义及主要工作 (1) 第2章步进电动机 (2) 2.1步进电动机的分类、结构及特点 (2) 2.1.1步进电动机的分类 (2) 2.1.2步进电动机的结构及特点 (2) 2.2步进电动机的工作原理、主要参数及特性 (4) 2.2.1步进电动机的工作原理 (4) 2.2.2主要参数及特性 (5) 2.3步进电动机的应用 (6) 第3章三相交流伺服电动机 (7) 3.1交流伺服电动机结构 (7) 3.2交流伺服电动机工作原理 (7) 3.2.1交流伺服电动机工作原理 (7) 3.2.2交流伺服电动机有以下三种转速控制方式 (8) 3.3三相交流伺服电动机的应用 (8) 第4章总结 (9) 参考文献 (10) 谢辞 .................................................................................................................. 错误!未定义书签。
本科生课程大作业报告 课程名称:题目:姓名:学号:学院:专业:指导教师:特种电机及其驱动技术 电机在空调中的应用 电气工程学院 电气工程及其自动化
目录 1 概述 (2) 1.1 电机简介 (2) 1.2 空调电机的基本要求 (3) 2 空调用电机原理 (3) 2.1 压缩机电机 (3) 2.1.1 异步电动机特点及其控制系统 (4) 2.1.2 单相异步电机 (4) 2.1.3 三相异步电机 (5) 2.2 空调风扇电机 (7) 2.3 其它装置用电机 (9) 2.4 步进电机在空调中的应用 (9) 2.4.1 步进电机简介 (9) 2.4.2 步进电机在空调中的应用 (10) 2.5 永磁同步电机在空调中的应用 (11) 2.5.1 永磁同步电机工作原理及其特点 (11) 2.5.2 永磁同步电机在空调中的应用 (12) 2.6 无刷直流电机在空调中的应用 (13) 2.6.1 无刷直流电机简介 (13) 2.6.2 无刷直流电机在空调中的应用 (14) 3 空调中常用电机性能比较 (14) 4 结论与展望 (15)
电机在空调中的应用 电机( Electric Machine ),是机械能与电能之间转换装置的统称。转换是双向的,大部 分应用的是电磁感应原理。由机械能转换成电能的电机,通常称做“发电机” ;把电能转换成机械能的电机,被称做“电动机” 。电机在生活中的应用非常广泛,在家庭中一般属于驱 动型电机。驱动用电动机可划分:电动工具(包括钻孔、抛光、磨光、开槽、切割、扩孔等 工具)用电动机、家电(包括洗衣机、电风扇、电冰箱、空调器、录音机、录像机、影碟机、吸 尘器、照相机、电吹风、电动剃须刀等)用电动机及其它通用小型机械设备(包括各种小型机 床、小型机械、医疗器械、电子仪器等)用电动机。家用电动机主要是小功率电机,家庭中凡有 转动件的,都是由电机来驱动的,如:空调室内机风扇电机、室外风扇电机、空气 压缩机、室内机转页电机等。家用电器的性能与所匹配的电机有着直接的关系,电机的效率、功率因数、调速范围及噪声与家电的节能环保有着密切的关系。本文着重讨论电机在空调中 的典型应用。 1 概述 空调即空气调节器(Air Conditioner ),是指用人工手段,对建筑/构筑物内环境空气的温度、湿度、洁净度、速度等参数进行调节和控制的过程。一般包括冷源/ 热源设备,冷热介质输配系统,末端装置等几大部分和其他辅助设备。主要包括水泵、风机和管路系统。末端装置则负责利用输配来的冷热量,具体处理空气,使目标环境的空气参数达到要求。 空调的结构包括压缩机、冷凝器、蒸发器、风扇、四通阀、单向阀毛细管组件。空调中 的驱动电机主要有 4 个。一个是在压缩机里做功,起到循环制冷剂的作用;一个是在室外机里,带动风扇给压机、冷凝器降温;一个是在室内机里,带动风扇把蒸发器的“冷”给吹出来;一个是室内机百叶窗的调整电机。 1.1 电机简介 电机是应用电磁感应原理运行的旋转电磁机械,用于实现电能向机械能的转换。运行时从电系统吸收电功率,向机械系统输出机械功率。电机驱动系统主要由电机、控制器(逆变器)构成,驱动电机和电机控制器所占的成本之比约为1:1,根据设计原理与分类方式的不同,电机的具体构造与成本构成也有所差异。电机的控制系统主要起到调节电机运行状态, 使其满足整车不同运行要求的目的。针对不同类型的电机,控制系统的原理与方式有很大差别。 图 1.1-1电动机驱动系统的基本组成框图
1 简述特种电机的特点及发展趋势。 特点:工作原理、励磁方式、技术性能以及结构上有较大特点,且种类繁多、功能多样化,种类繁多,功能多样化,而且不断产生功能特性,性能优越的新颖电机。 发展趋势:机电一体化、智能化、大功率化、小型化、微型化、励磁材料永磁化、高功能化。 2 电机中常用的永磁材料有哪几类,各有何特点? ①铝镍钴永磁材料:温度系数小,剩余磁场强度较高,但矫顽力很低;退磁曲线呈非线性;使用前要进行稳磁处理。 ②铁氧体永磁材料:价格低廉,制造工艺简单,质量较轻;温度系数较大,剩磁密度不高,矫顽力较大;退磁曲线大部分接近直线;不能进行电加工。 ③稀土永磁材料:高剩磁密度,高矫顽力,高磁能积;稀土钴永磁价格昂贵,温度系数小,退磁曲线基本上是一条直线;钕铁硼永磁价格较便宜,温度系数较大,容易腐蚀,在高温下使用时退磁曲线的下半部分要产生弯曲。 1.永磁直流电动机与电励磁直流电动机结构上有什么相似和不同之处? 两者相比,永磁直流电动机有什么优点? 相似之处:在电枢结构上基本相同。 不同之处:在定子侧永磁直流电动机为永磁体,而电励磁直流电动机为电励磁磁极。优点:永磁电动机没有励磁绕组铜耗,因此相对而言效率更高;永磁电动机体积小质量轻、机械特性硬、电压调整率小。 2.永磁材料的性能对永磁直流电动机磁极结构和永磁体尺寸有什么影响? 永磁材料的性能对磁极的结构形式和尺寸有决定性影响。由于永磁材料的性能差异很大,为达到某一要求,所选用不同材料的磁极的结构形式和尺寸不相同。 铁氧体在性能上具有Br小、Hc相对高的特点,所以常做成扁而粗的瓦片形或圆筒形的磁极结构; 铝镍钴永磁具有Br高、Hc低的特点,一般做成细而长的弧形或端面式的磁极结构;稀土永磁的Br、Hc及(BH)max都很高,适宜做成磁极面积和磁化长度都很小的结构。 3.永磁直流电动机有极靴的磁极结构有什么优点和缺点?原因何在? 有极靴磁极结构既可起聚磁作用,提高气隙磁通密度,还可调节极靴形状以改善空载气隙磁场波形;负载时交轴电枢反应磁通路径经极靴闭合,对永磁磁极的影响较小。缺点是漏磁系数大,负载时的气隙磁场的畸变较大。 原因:极靴的存在使得永磁体不能直接面向气隙,主磁通就变小,漏磁系数变大;主磁通需经极靴闭合,使得负载时气隙磁场产生较大的畸变。 4.永磁直流电动机中的电磁转矩和感应电动势各由什么物理量决定?为什么电磁转矩和感应电动势是实现机电能量转换不可分割的两个方面? 电磁转矩至决定于fai和ia,与转速n无关,运动电动势仅决定于气隙磁通fai和电机的转速n。
智能控制理论及其应用 [摘要] 本文回顾了智能控制理论的提出与发展过程,介绍了智能控制的特点,给出了智能控制理论的主要类型及其特点,列举了智能控制理论与技术的主要应用领域,最后总结了智能控制理论的发展趋势。 [关键词] 智能控制模糊控制神经网络专家控制[abstract] this paper reviewed the development of intelligence control, and introduced its main methods and characteristics, and particularized their mostly application fields, and pointed out the prospects of intelligent control development trend and put forward the study direction. [key words] intelligent control fuzzy control net neural expert control 0.引言 随着工业和自动化技术的发展,控制理论的应用日趋广泛,所涉及的控制对象日益复杂化,对控制性能的要求也越来越高,控制对象或过程的复杂性主要体现在系统缺乏精确的数学模型、具有高维的判定空间、多种时间尺度和多种性能判据等,要求控制理论能够处理复杂的控制问题和提供更为有效的控制策略。现代控制理论从理论上解决了系统的可观、可控、稳定性以及许多复杂系统的控制。但实际中的许多复杂系统具有非线性、时变性、不确定性、多层次、多因素等热点,难以建立精确的数学模型,因此需要引入新
智能控制理论及应用复习 (紧扣课本) 第一章绪论 经典控制和现代控制理论的统称为传统控制, 智能控制是人工智能与控制理论交叉的产物,是传统控制理论发展的高级阶段。智能控制是针对系统的复杂性、非线性和不确定性而提出来的, 传统控制和智能控制的主要区别: ?传统控制方法在处理复杂化和不确定性问题方面能力很低; 智能控制在处理复杂性、不确定性方面能力较高。智能控制系统的核心任务是控制具有复杂性和不确定性的系统,而控制的最有效途径就是采用仿人智能控制决策。 ?传统控制是基于被控对象精确模型的控制方式; 智能控制的核心是基于知识进行智能决策,采用灵活机动的决策方式迫使控制朝着期望的目标逼近。 传统控制和智能控制的统一: 智能控制擅长解决非线性、时变等复杂的控制问题,而传统控制适于解决线性、时不变等相对简单的控制问题。 智能控制的许多解决方案是在传统控制方案基础上的改进,因此,智能控制是对传统控制的扩充和发展,传统控制是智能控制的一
个组成部分。 智能控制应用对象的特点 (1)不确定性的模型 模型未知或知之甚少; 模型的结构和参数可能在很大范围内变化。 (2)高度的非线性 (3)复杂的任务要求 例如,要求系统对一个复杂的任务具有自行规划和决策的能力;要求除了实现对各被控物理量定值调节外,还要实现整个系统的自动启停、故障的自动诊断以及紧急情况的自动处理等功能。 智能控制的基本特点 (1)分层递阶的组织结构 (2)多模态控制 (3)自学习能力 (4)自适应能力 (5)自组织能力 (6)优化能力 智能控制系统的主要类型 模糊控制
神经网络控制 专家控制系统 分层递阶智能控制(该系统由组织级、协调级、执行级组成,按照自上而下精 确程度渐增、智能程度渐减的原则进行功能分配。 在这类多层智能控制系统中,智能主要体现在高层次上,其主要作用是模仿人的功能实现规划、决策、学习和任务协调等任务。 执行级仍然采用现有数学解析控制算法,对数值进行操作和运算。) 与常规控制方法相比,模糊控制有以下特点: ①模糊控制完全是在操作人员控制经验基础上实现对系统的控制,无需建立数学模型,是解决不确定性系统的一种有效途径。 ②模糊控制具有较强的鲁棒性,被控对象参数的变化对模糊控制的影响不明显,可用于非线性、时变、时滞系统的控制。 ③由离线计算得到控制查询表,提高了控制系统的实时性。 ④控制的机理符合人们对过程控制作用的直观描述和思维逻辑,为智能控制应用打下了基础。 人工神经网络具有几个突出的特点: ①可以充分逼近任意复杂的非线性关系; ②所有定量或定性的信息都分布贮存于网络内的各神经元的连接上,故有很强的鲁棒性和容错性; ③采用并行分布处理方法,使得快速进行大量运算成为可能; ④可学习和自适应不知道或不确定的系统。
哈尔滨远东理工学院2015——2016学年第二学期(大补考)分院: 课程:特种电机及其控制 专业班级: 学号: 学生姓名: 分数: 2016年5月16日
一、简介 特种电机是相对于传统有刷直流电机和交流异步电机模糊概念。传统上,除有刷直流电机、交流异步电机外,所有电动机都叫做特种电机。而非运用于特种场合的电机才是特种电机。 发电机和电动机结构上基本相同,通电运行可为电动机;原动力拖动转子旋转,磁场切割定子绕组感生出电动势成为发电机。 结构构造,电机和发电机在综合结构上基本相同,两者具有可逆性。 电机结构构造:通过电线圈在磁场中受到安培力作用而转动,并在运动过程中带动其他的物体运动。发电机结构构造:利用物理外力驱动,转动线圈,使其切割磁力线,产生电流。 电机工作原理:利用电流转变成机械能,带动外部物体转动 发电机工作原理:利用电磁感应将机械能转变为电能。 电机和发电机之间不是对等关系!虽然电动机和发电机之间有可逆性!在使用过程中,我们将它们结合起来是不会成为永动机器的,因为有能量守恒。 随着中小型电机中产品结构的调整和优化,特种专用电机将成为电机行业发展的重点,其市场需求及发展速度将在本行业中处于领先地位。中小型电机行业内的大型企业生产电机的品种和系列较多,综合实力占优;规模略小的企业则关注于特定的一种或几种电机的生产,力争在细分产品市场取得优势。 我国长期以来中小型电机特种产品品种少,产品结构不合理,表现为基本系列多,派生专用系列少;一般品种多,专用品种少。各企业根据市场需要,也注重了专用电机的发展,经过“十五”、“十一五”技术改造,调整产品结构,特种专用电机都有不同程度的发展。预计“十二五”期间我国标准系列电机与特种专用电机比约为4:6,而国外普通标准系列电机与特种专用电机比为3:7。因此一些高效节能的电机、高品位的出口电机和机电一体化的特种电机将有很好的市场前景。 二、特种电机的种类与区别 无刷直流电动机主要由电动机本体、位置传感器和电子开关电路三部分组成。电动机本体在结构上与永磁同步电动机相似,但没有笼型绕组和其他起动装置。其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,…)组成。 定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各相绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。 所以,所谓直流无刷电动机,就其基本结构而言,可以认为是一台由电子开关线路、永磁式同步电动机以及位量传感器三者组成的“电动机系统”。 与电励磁直流电动机相比,永磁直流电动机的电枢结构基本相同,主要差别是在定子侧由永磁体代替了电励磁磁体。永磁直流电动机保留了电励磁直流电动机良好的调速特性和机械特性,又因省去了励磁绕组和励磁损耗而具有结构工艺简单、体积小、用铜量少和效率高等特点。功率在300W以内时,永磁直流电动