现
代计算机(总第二六三期)
MODERNCOMPUTER2007.7
*基金项目:广东省科技计划项目(2002A1010308)收稿日期:2007-05-08修稿日期:2007-06-29
作者简介:曹江中(1976-),男,湖南郴州人,硕士,助教,研究方向为图像信息处理技术及应用
0引言
行人检测是交通信息采集系统的一个重要部分。
高速公路属于全封闭的安全通道,加强对行人的检测对于保障高速公路行车安全是有重要意义的。当检测到路面有行人时,监控中心马上做出相关处理,从而可以迅速地避免交通事故的发生。
1行人检测
1.1背景更新
用于检测行人的视频来自交通信息采集系统,采
用位置固定的摄像机,交通视频的背景相对静止,但由于室外光照的变化和车辆经过时的振动都会引起视频背景的变化,因此需要对背景不断进行更新。根据高速公路行车的特点,设计一个基于像素的背景更新算法[3]
,其基本思路是:给检测区的每一个像素设置
一个计数器Count(i,j),对该计数器作如下操作:
ifCti,!"j-Bti,!"
j>gray_thr
Count(i,j)+1elseCount(i,j)=0
其中Bti,!"j、Cti,!"
j分别表示t时刻的背景和采集的图像对应于位置(i,j)处的像素值,gray_thr是灰度阈值,可以根据当时CCD摄像机的电位噪声和地面光照强度来动态设定。
当gray_thr>N时就将当前像素值作为背景(Ct
i,!"j←Bt
i,!"
j),也即:若检测区中像素的灰度连续N
次的变化小于阈值gray_thr。则将该当前像素值作为背景,其中N的值可以根据经验确定,但必须满足下
式:
N>50mVmax×!
"t式中t为采集连续两帧图像的时间间隔。Vmax为高速公路车辆允许的最大速度。
这种背景更新算法,对于云层阴影、
固定物体的影子、路面水迹等具有较好的适应性,但运动目标进入检测区域后停滞时间较长时会被误认为背景,因此,还需考虑不对运动目标区域进行更新。
1.2运动目标检测
针对高速公路上的行人在视频图像中有效面积较小,运动缓慢的情况,本文采用背景帧差法来检测运动目标。假定获取的背景图像为B,当前图像为C,则在理想情况下当前图像减去背景图像后,像素值发生改变的就是前景区域(运动目标),但在实际应用中,由于采集的图像存在着较大的噪声干扰,往往需要引入一个抑止噪声的阈值thr_gray,如式(1)。图像I中像素值为255的区域则为运动目标区域。
Ii,!"
j
255ifabsCij-Bij!">thr_gray
0
ifabsCij-Bij!"<thr_gra$
y
(1)
由于运动目标的某些区域往往在灰度上与背景相差不大,检测出的运动区域并不总是一个联通区域,因此还需对其进行后处理,使整个目标区域联通。后处理通常采用的是数学形态学的方法[4]。数学形态学在图像处理方法上表现为邻域运算形式,因此计算量较大,并且交通信息采集系统中的行人检测目的是判断行人的存在与否,并不一定要检测出行人的轮廓,因此我们采用了一种网格降维的方法,将检测区域网格化,划分为互不重叠的5×5的小块,统计小块
交通信息采集系统中的行人检测算法*
曹江中1,戴青云1,谭志标2,邸磊2
(1.广东工业大学信息工程学院,广州510090;2.广东新粤智能交通研究院,广州510101)
摘
要:根据高速公路行人运动的先验知识,设计了一种基于视频检测技术的高速公路行人检测算
法。该算法采用背景帧差分法获取运动目标区域,采用跟踪链实现运动目标跟踪,根据行人运动的先验知识在运动目标中检测行人。算法已嵌入到交通信息采集系统中,在高速公路上进行的现场测试结果表明,算法具有较好的实时性和实效性。
关键词:行人检测;视频检测;运动检测;目标跟踪!
"
现代计算机(总第二六三期)
中运动区域,当小块中的运动区域超过某个阈值时,
就认为整个块就是一个运动区域,然后在对块进行聚
类处理,将相连的块作为一个运动目标,求出其重心
位置和面积大小。这种方法虽然不能精细勾画出行人
轮廓,但仍能准确判断出行人的大致面积和位置,并
且使处理速度大大提高。
1.3运动目标跟踪
目标跟踪就是为了获取目标的运动轨迹。行人在
空间上和时间上都具有连续性,本文采用的图像采集
帧率是25帧/秒,即连续采集二帧的时间间隔是
0.025秒,在这么短的时间内,行人的位置、面积、形状
变化非常小。因此,可以根据面积大小、位置作为匹配
特征来跟踪行人。本文采用跟踪链实现运动目标的跟
踪。跟踪链由链结点组成,每个链结点对应一个运动
目标,链结点包括起始坐标(重心坐标)、当前坐标、面
积、出现时间、消失时间等信息。记录消失时间主要是
为了解决运动目标暂时被遮挡的问题。在跟踪时,将
当前帧中的每一个运动目标分别与跟踪链中的每个
结点进行距离、面积等特征的匹配,当找到有重心距
离小于某个阈值,并且面积差异也在某阈值之内时,
就认为跟踪成功,将当前坐标、面积进行更新,并且将
出现时间加一,消失时间置零,否则就认为有新的目
标出现,在跟踪链中加入一个链节点。在当前帧中的
运动目标全部遍历一遍后,对于没有跟踪到的链节
点,将其消失时间加一,如果消失时间大于某延时阈
值时,则认为该链接点对应的目标跟踪失败,将该链
节点删除。
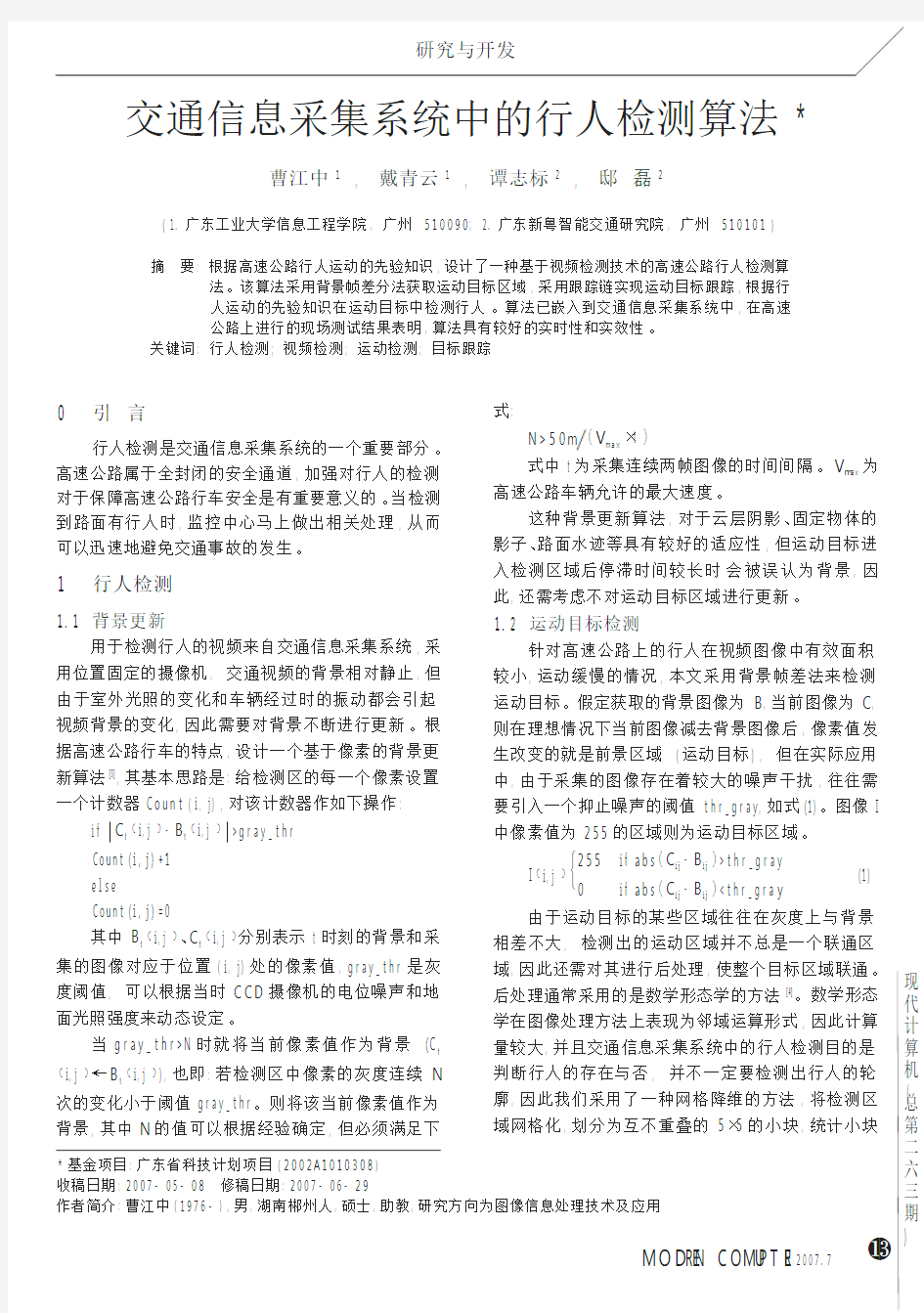
1.4行人检测算法流程
检测到的运动目标不一定就是行人,可能还包括
车辆、车辆阴影、路旁晃动的树影等等。因此,还需要
对运动目标的面积、速度、轨迹等进一步分析判断,根
据行人运动的先验知识,设计了一种基于行人运动特
征的检测算法。这些先验知识主要包括:①行人的面
积比车辆小很多;②行人的速度比车辆的慢;③行人
在图像中的面积大小范围在摄像机安装固定后是可
以确定的;④行人于路旁的树影相比,在面积上和运
动的距离上有较大区别;⑤相比车辆带来的阴影、反
光引起的小区域亮度变化,行人的存在时间长。根据
这些先验知识,算法首先通过前面的方法得到运动目
标的跟踪链,再根据面积大小区分出车辆和小运动目
标,然后再根据行人的存在时间和运动距离来判断是
晃动的阴影还是行人。其流程如图1所示。
图1行人检测算法流程图
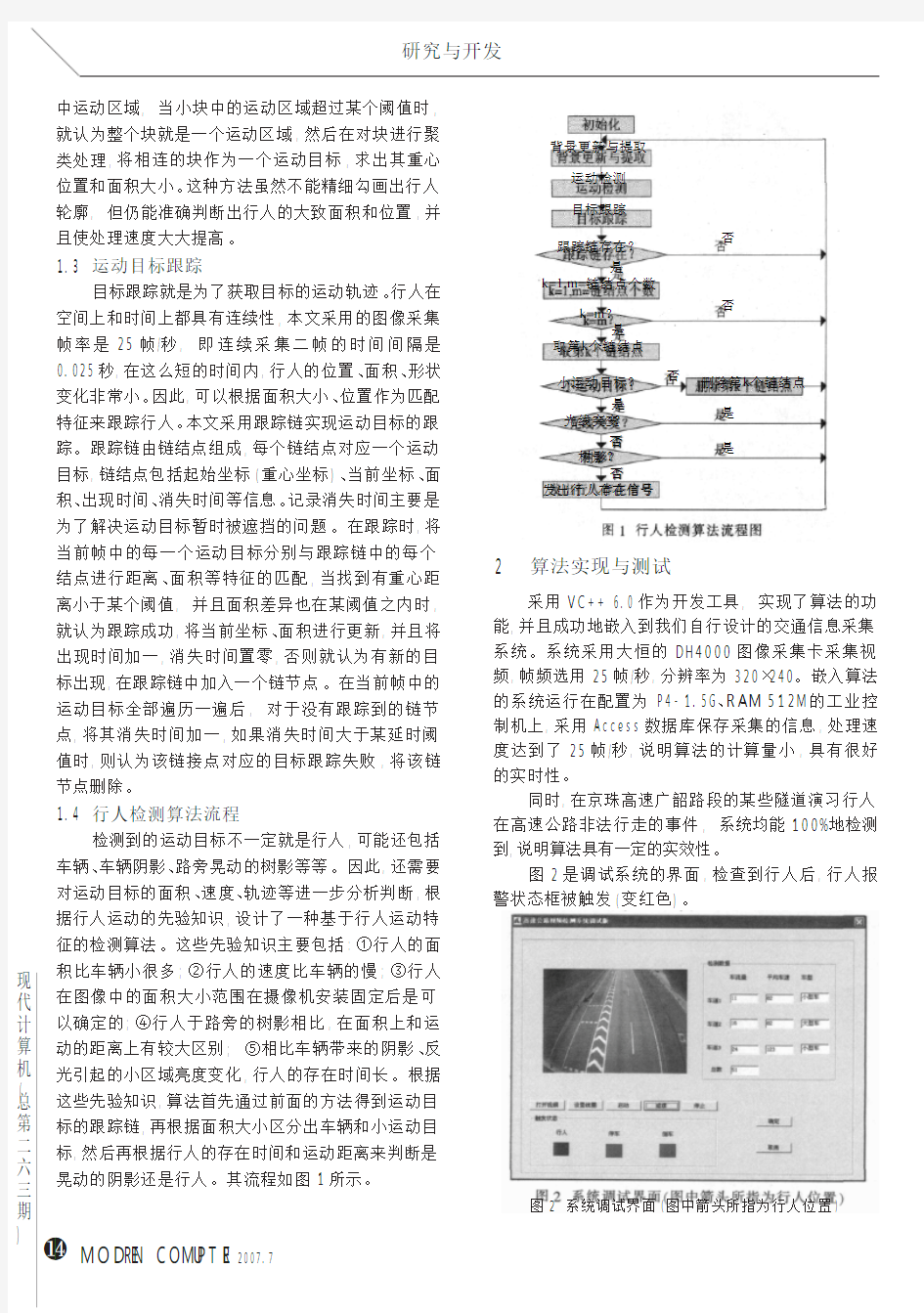
2算法实现与测试
采用VC++6.0作为开发工具,实现了算法的功
能,并且成功地嵌入到我们自行设计的交通信息采集
系统。系统采用大恒的DH4000图像采集卡采集视
频,帧频选用25帧/秒,分辨率为320×240。嵌入算法
的系统运行在配置为P4-1.5G、RAM512M的工业控
制机上,采用Access数据库保存采集的信息,处理速
度达到了25帧/秒,说明算法的计算量小,具有很好
的实时性。
同时,在京珠高速广韶路段的某些隧道演习行人
在高速公路非法行走的事件,系统均能100%地检测
到,说明算法具有一定的实效性。
图2是调试系统的界面,检查到行人后,行人报
警状态框被触发(变红色)
。
k=1,m=
k=m
k
!"
#$%& ’(
)* k
+
+
+
+
+
,
,
,
,
,
图2系统调试界面(图中箭头所指为行人位置)!"
MODERNCOMPUTER2007.7
现代计算机(总第二六三期)
MODERNCOMPUTER2007.7
ResearchonThreadModelinCallbackBasedonCARComponentTechnology
WANGWen-jing,CHENRong
(StateEducationMinistryLaboratoryofEmbeddedSystem,TongjiUniversity,Shanghai200092)Abstract:Keywords:Callback;Asynchronism;CAR(ComponentAssemblyRuntime)ComponentTechnology;ThreadModel
DescribesathreadmodelbasedonCARcomponenttechnologywhichisanewandpower-
fulcomponenttechnology,thismodelmakesthemodulesofanapplicationmoreclearly,andalsomakesthedevelopmentofapplicationimproveefficaciously.
3结语
本文根据高速公路的行人运动先验知识,采用视
频检测技术,设计了一种基于先验知识的高速公路行人检测算法。
参考文献
[1]FujiyoshiH,LiptonAJ.Real-TimeHumanMotion
AnalysisbyImageSkeletonization.ApplicationofComputerVision,1998,98:15.21
[2]刘亚,艾海舟,徐光佑.一种基于背景模型的运动目标检
测与跟踪算法.信息与控制,2002(8):315 ̄319
[3]曹江中,戴青云,谭志彪等.基于视频的高速公路车辆检
测和跟踪算法.计算机应用,2006.26(2):496 ̄499
[4]张建荣,姜昱明.实时跟踪系统中运动人体图像分割.计
算机仿真,2006.(6):54 ̄56
PedestrianDetectionAlgorithm
inTrafficInformationAcquisitionSystem
CAOJiang-zhong1,DAIQing-yun1,TANZhi-biao2,DILei2
(1.InformationEngineeringCollege,GuangdongUniversityofTechnology,Guangzhou510090;
2.XINYUEIntelligentTransportResearchInstitute,Guangzhou510101)
Abstract:Keywords:PedestrianDetection;VideoDetection;MotionDetection;ObjectTracking
Accordingtothepriorknowledgeofpedestrian,designsapedestriandetectionalgorithm
basedonvideodetectiontechnology.Thealgorithmacquiresthemovingobjectsusingbackgrounddifferencing,tracestheobjectsusingtrace-lain,anddetectsthepedestrianaccordingtothepriorknowledgeofpedestrian.Thealgorithmisembeddedinthetrafficinformationacquisitionsystem,theresultoftestonhighwayshowsthatithasgoodrealtimecapabilityandreliability.
(上接第6页)
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
!
"
交通道路标志牌检测与识别综述 一、背景综述 随着社会科技不断发展和进步,车辆已经普及到国内大部分家庭。汽车的普及极大方便了人们的出行、生活和工作,同时也不可避免的产生了很多的交通问题。据公安部交通管理局统计,2014年1月至10月,全国共发生道路交通事故426378起,造成87218人死亡、391752人受伤,直接财产损失20.2亿元。交通安全问题成为人们日常生活中最常见的问题之一,受到了政府、科研机构以及汽车生产厂家的高度重视。 解决交通安全问题的途径之一是准确、有效地设立道路交通标志,为驾驶员提供丰富的禁令、警告、指示等信息,从而起到减少交通事故的作用。为了确保交通标志的信息能够及时、准确地传达,交通标志自动识别系统(Traffic Sign Recognition,TSR)受到了各国学者的关注,其主要功能表现在以下几个方面: (1)用于驾驶辅助。交通标志识别的概念最早就是作为驾驶辅助工具被提出的。TSR系统在识别出交通标志后,可对驾驶员进行语音或视频等方式的提醒,甚至可以在必要的时候对车辆驾驶系统直接做出控制,从而确保驾驶安全。 (2)用于交通标志维护。由于交通标志通常放置于室外环境中,受自然环境(如风吹雨淋)及人为因素(如涂抹)影响,难免出现褪色、变形甚至坠落失踪现象,需要进行定期检查维护。通常,这一工作需安排专人专岗,工作量巨大且很难保证实时性和准确性。显然,一个有效的TSR系统是完成这一工作的理想方案。 (3)用于无人驾驶技术。无人驾驶汽车在近年来受到了越来越多的关注。从上世纪90年代起,国内外相继研发出了一系列无人驾驶汽车,其智能化逐渐提高,能够自动规划路线,避让障碍物等。使无人驾驶汽车具备辨认交通标志的能力显然是使其实用化的一个重要步骤。 TSR在计算机领域中是一个非常重要的分支研究领域,而图像检测以及处理是其主要手段,这是一个难度比较大的实景图形识别问题。在车载视觉系统中,如何有效地识别道路交通标志是一个非常重要的研究课题。 TSR包括三个重要模块:图像复原、标志检测、标志分类。交通标志的外观
液相色谱法检测的生育酚方法报告 一、生育酚简介 又称维生素E,是一种脂溶性维生素,是最主要的抗氧化剂之一。溶于脂肪和乙醇等有机溶剂中,不溶于水,对热、酸稳定,对碱不稳定,对氧敏感,对热不敏感。 维生素E为微带粘性的淡黄色油状物,在无氧条件下较为稳定,甚至加热至200℃以上也不被破坏。但在空气中维生素E极易被氧化,颜色变深。维生素E易于氧化,故能保护其他易被氧化的物质(如维生素A及不饱和脂肪酸等)不被破坏。 维生素E的化学名称为(1)-2、5、7、8-四甲基2-(-4、8、12-三甲基十三烷基)-6-苯并二氢吡喃醇醋酸酯,分子式为C31H52O3,结构式为: 根据其化学结构可分为生育酚及生育三烯酚两类。生育酚主要有四种衍生物,按甲基位置分为α、β、γ和δ四种。其中,α-生育酚:R1,R2=CH3;β-生育酚:R1=H,R2=CH3;γ-生育酚:R1=CH3,R2=H;δ-生育酚:R1,R2=H。维生素E以α-生育酚生理活性最高,β-及γ-生育酚仅为α-生育酚的40%和8%。 二、色谱方法的选择 现行标准中维生素E的检测仅有两个标准——《食品中维生素A和维生素E的测定》(GB/T 5009.82-2003)和《食用植物油中维生素E组分和含量的测定高效液相色谱法》(NY/T 1598-2008),其中前者介绍了液相色谱法和比色法两种方法。 目前有的文献[1]中指出,气相色谱法虽能正确定量维生素E,但是对不同型分离困难,为了使α-维生素E与β-维生素E及γ-维生素E分离,预先要将试样进行三甲基硅烷化或酯化,同时胆同醇等硬脂类对测定有干扰。另外,如果前期样品处理不好,很容易对毛细管柱造成污染。故建议使用液相色谱法。 三、内标法和外标法的选择 1、两种方法的区别: 内标法外标法内标物与待测物相似,且均出峰不需要 标准曲线需要,可两点需要,需多点 优点定量准确操作简便 缺点不容易选择内标物;操作精度高与标准品严格相同的操作条件 2、在《食品中维生素A和维生素E的测定》中采用了内标法,内标物为苯并[a]芘,另外 文献中也有使用正三十二烷及十六酸十六醇酯等。《食用植物油中维生素E组分和含量的测定高效液相色谱法》中使用的外标法,国内大多数检测维生素E的文献中都用的是外标法。根据我部门的实际情况,维生素E的检测一般用于豆油脂肪酸的日常检测和协助营销部门的发货定价,故精度要求不是非常高,而内标法每次检测需用到内标物,而内标物的成本通常偏高,因此,外标法可以满足我部门日常检测的需求。
道路交通安全设施的检测标准 一、交通标志的检测 1.交通标志的制作应符合《道路交通标志和标线》(GB 5768)、《公路交通标志板技术条件》(JT/T 279)、《公路交通标志反光膜》(GB /T l8833)以及设计图纸的要求。 2.对于交通标志各构件的检测项目主要包括标志板外形尺寸、标志字符尺寸、标志面反光膜等级及逆反射系数、标志面反光膜缺陷、气泡检查、反光膜拼接、支撑结构及连接件的质量、金属构件的防腐、标志板与铝槽的连接等,另外,还应根据GB/T l8833《公路交通标志反光膜》中的要求对标志面所用的反光膜的性能进行检测。 3.对于施工完毕的标志,主要应进行标志板安装平整度检验、立柱垂直度检验、标志板下缘至路面净空高度检验、标志板内侧距土路肩边线距离检验、基础尺寸检验等。特别要注意,悬臂式和门架式标志的标志板下缘至路面净空高度(允许偏差为+100mm,0)、柱式标志的标志板内侧距土路肩边线距离(允许偏差为+100mm,0),从而满足公路净空及建筑限界的要求。 4.里程标和百米标的检测项目与标志相同。 二、交通标线的检测
所有标线涂料均应符合《路面标线涂料》(JT/T 280)和《路面标线用玻璃珠》(JT/T446)中的要求,突起路标则应符合《突起路标》(JT /T 390)中的要求。 对于标线涂料应根据涂料的类型不同进行不同项目的检测: 1.溶剂型路面标线涂料分为普通型和反光型:普通型是指涂料中不含玻璃珠,施工时也不撒布玻璃珠;反光型是指涂料中不含玻璃珠,施工时涂布涂层后立即将玻璃珠撒布在其表面。溶剂型涂料主要的检测项目包括容器中的状态、密度、黏度、施工性能、加热稳定性、涂膜外观、不粘胎干燥时间、遮盖率、色品性能、耐磨性、耐水性、耐碱性、附着性、柔韧性、固体含量等。 2.热熔型涂料分为普通型、反光型和突起型,涂料的主要检测项目包括密度、软化点、涂膜外观、不粘胎干燥时间、色度性能、抗压强度、耐磨性、耐水性、耐碱性、玻璃珠含量、流动性、涂层低温抗裂性、加热稳定性、人工加速耐候性等。 3.双组分涂料分为普通型、反光型和突起型,涂料的主要检测项目包括容器中状态、密度、施工性能、涂膜外观、不粘胎干燥时间、色度性能、耐磨性、耐水性、耐碱性、陡着性、柔韧性、玻璃珠含量、人工加速耐候性等。 4.水性涂料分为普通型和反光型,涂料的主要检测项目包括容器中状态、黏度、霍度、施工性能、漆膜外观、不粘胎干燥时间、遮盖率、色
行人检测与跟踪国内外研究现状 1.2行人检测与跟踪国内外研究现状 视觉跟踪和目标检测是计算机视觉领域内较早开始的研究方向。经过几十年的积累,这两个方向已经取得了显著的发展。然而,很多方法只是在相对较好地程度上解决了一些关键问题。并且仍旧有不少一般性的关键问题未得到有效的解决。国内外很多研究机构都在致力于研究和发展这两个方向。近些年这两个方向持续发展,涌现了很多比较优秀的方法。国外的很多大学和研究机构(如卡内基梅隆大学、南加州大学和法国国家计算机科学与控制研究所等)都有计算机视觉小组,长期地研究视频跟踪和目标检测。国内的很多大学和研究所等(如清华大学、上海交大和自动化所等)也有相关的研究小组,并取得了一些优秀的研究成果。 1.2.1行人检测技术国内外研究现状 中科院计算机科学重点实验室孙庆杰等人利用基于侧影的人体模型及其对应的概率模型,提出了一种基于矩形拟合的人体检测算法。中科院自动化所谭铁牛等对人运动进行视觉分析,其核心是利用计算机视觉技术从图像序列中检测、跟踪、识别人并对其行为进行理解与描述,它主要应用在视觉监控领域和基于步态的身份鉴定。步态识别就是根据人们走路的姿势进行身份鉴定,依据人体行走运动很大程度上依赖于轮廓随着时间的形状变化的直观想法,提出一种基于时空轮廓分析的步态识别算法;基于行走运动的关节角度变化包含着丰富的个体识别信息的思想,提出一种基于模型的步态识别算法。实验结果表明该算法不仅获得了令人鼓舞的识别性能,而且拥有相对较低的计算代价。但是该方法只能检测出运动的行人。 西安交通大学郑南宁等研究了利用支持向量机识别行人的方法,通过稀疏Gabor滤波器提取行人样本图像中行人的特征,然后利用支持向量机来训练所提取的样本特征,并用训练得到的分类器通过遍历图像的方式将图像中可能属于行人的窗口提取出来。尽管用Gabor滤波器提取特征效果相对较好,但耗时很长,不适合于实时图像的处理。 上海交通大学田广等提出了一种coarse-to-fine的行人检测方法,将一个人建模成人体自然部位的组装,人体的所有部位包括头肩、躯干和腿、采用绝对值类Haar特征集和Edgelet特征集,在这些特征集上,采用softcascade训练各个部位的检测器和全身检测器。首先采用全身检测器在整个图像中产生候选行人区域,然后用基于贝叶斯决策的组合算法进一步确定候选区域中的行人。实验结果表明该算法有很好的检测性能能在杂乱的自然场景中有效的检测行人。但该方法的识别率是78.3%,识别率不高,且该模型比较难构建,模型求解也比较复杂。 目前,在国外许多文献中提出了基于机器视觉的行人检测方法,意大利帕尔玛大学的AlbertoBroggi教授在ARGO项目中采用一种基于外形的行人检测算法。算法首先根据行人相对于垂直轴有很强的垂直边缘对称性、尺寸和外貌比例等在
一种新型的交通信息采集系统——浮动车交通信息采集系统研 究 一、浮动车系统简介 目前北京市现有的交通信息采集系统主要包括:环型线圈检测系统、微波检测系统、超声波检测系统、视频检测系统(含牌照识别检测系统)等。这些都是固定点交通流检测系统,能够检测道路断面交通流量、速度等交通参数,但覆盖范围有限。目前,系统基本覆盖二、三、四环和联络线,以及四横两纵的主干路,对次干路和支路没有覆盖。而且除牌照识别检测系统外,其它固定点检测系统检测到的交通流信息都是断面信息,不能完整反映区段交通运行情况,如只能获取断面速度,而不能获取路段平均旅行速度。 浮动车交通信息采集系统(简称浮动车系统,FCD)是伴随着ITS新技术应用而在近几年发展起来的动态实时交通流信息采集技术。所谓浮动车就是指安装有定位和无线通信装置的普通车辆(如出租车、公交车、警车等),这种车辆能够与交通数据中心进行信息交换。而浮动车系统是指通过交通流中一定比例的浮动车辆与交通数据中心实时交换数据的一种新型交通信息采集系统。 浮动车系统之所以得到重视,主要原因在于浮动车系统有别于传统固定检测方法的突出特点:(1)覆盖面广,采集范围不再仅仅是点、线,而是面;(2)投资省。浮动车系统通常结合调度和诱导系统建设,大大节省了投资;(3)采集数据多样、准确。浮动车系统采集的路段平均车速、旅行时间对于了解道路运行状况、分析拥堵原因、提供交通诱导服务等都是非常关键的参数。 目前在欧洲(主要是英国、德国)、美国、日本都在积极研发和推广应用浮动车交通信息采集系统。交研中心自2003年开始,即通过与国外知名科研机构、企业等进行交流与合作,开展浮动车交通信息采集系统的相关研究工作。2004年,交研中心与美国通用公司合作完成了《北京2008奥运会浮动车实时交通流信息采集示范系统可行性研究》。 2005年,承担北京市科委科技计划课题《浮动车交通信息采集系统研究》,进行全面的技术研究和示范系统建设。经过近两年的深入研究,2007年3月,北京市科委组织专家对本课题成果进行了验收评审。 二、已取得的成果 1、技术研发 确定不同覆盖率要求条件下的浮动车数量规模。针对我国大城市复杂路网特性,开发了基于改进的最优路径选择的浮动车数据实时地图匹配算法,尤其解决了主辅路并行、立交匝道等复杂区域的地图匹配难题,既满足了浮动车交通信息采集系统实时计算的速度性能要求,也达到了95%的匹配准确率。建立了适合不同数据采集间隔的路段速度估算算法,通过对快速路的实际验证,算法精度达到90%以上。 2、应用系统搭建
第33卷第1期自动化学报Vol.33,No.1 2007年1月ACTA AUTOMATICA SINICA January,2007 车辆辅助驾驶系统中基于计算机视觉的 行人检测研究综述 贾慧星1章毓晋1 摘要基于计算机视觉的行人检测由于其在车辆辅助驾驶系统中的重要应用价值成为当前计算机视觉和智能车辆领域最为活跃的研究课题之一.其核心是利用安装在运动车辆上的摄像机检测行人,从而估计出潜在的危险以便采取策略保护行人.本文在对这一问题存在的困难进行分析的基础上,对相关文献进行综述.基于视觉的行人检测系统一般包括两个模块:感兴趣区分割和目标识别,本文介绍了这两个模块所采用的一些典型方法,分析了每种方法的原理和优缺点.最后对性能评估和未来的研究方向等一系列关键问题给予了介绍. 关键词行人检测,车辆辅助驾驶系统,感兴趣区分割,目标识别 中图分类号TP391.41 A Survey of Computer Vision Based Pedestrian Detection for Driver Assistance Systems JIA Hui-Xing ZHANG Yu-Jin Abstract Computer vision based pedestrian detection has become one of the hottest topics in the domain of computer vision and intelligent vehicle because of its potential applications in driver assistance systems.It aims at detecting pedestrians appearing ahead of the vehicle using a vehicle-mounted camera,so as to assess the danger and take actions to protect pedestrians in case of danger.In this paper,we give detailed analysis of the di?culties lying in the problem and review most of the literature.A typical pedestrian detection system includes two modules:regions of interest(ROIs) segmentation and object recognition.This paper introduces the principle of typical methods of the two modules and analyzes their respective pros and cons.Finally,we give detailed analysis of performance evaluation and propose some research directions. Key words Pedestrian detection,driver assistance system,ROIs segmentation,object recognition 1引言 车辆辅助驾驶系统中基于计算机视觉的行人检测是指利用安装在运动车辆上的摄像机获取车辆前面的视频信息,然后从视频序列中检测出行人的位置.由于它在行人安全方面的巨大应用前景,成为智能车辆、计算机视觉和模式识别领域的前沿研究课题.欧盟从2000年到2005年连续资助了PROTECTOR[1]和SAVE-U[2]项目,开发了两个以计算机视觉为核心的行人检测系统;意大利Parma[3]大学开发的ARGO智能车也包括一个行人检测模块;以色列的MobilEye[4]公司开发了芯 收稿日期2006-3-14收修改稿日期2006-6-17 Received March14,2006;in revised form June17,2006 国家自然科学基金(60573148),教育部高等学校博士学科点专项科研基金(20060003102)资助 Supported by National Natural Science Foundation of P.R.China(60573148),Specialized Research Fund for the Doc-toral Program of Higher Education(20060003102) 1.清华大学电子工程系北京100084 1.Department of Electronic Engineering,Tsinghua University, Beijing100084 DOI:10.1360/aas-007-0084片级的行人检测系统;日本本田汽车公司[5]开发了基于红外摄像机的行人检测系统;国外的大学如CMU[6]、MIT[7,8]和国内的西安交通大学[9]、清华大学[10]也在该领域做了许多研究工作. 车辆辅助驾驶系统中基于计算机视觉的行人检测属于计算机视觉中人体运动分析的研究范畴,其主要任务是在运动摄像机下快速准确地检测行人.本文主要针对这一特定领域对相关的文献进行综述,重点分析常用方法的原理和优缺点,以期对相关的科技人员起到指导作用.对监控系统和体育运动分析领域中人体检测感兴趣的读者可以参考综述文献[11~14]. 行人检测除了具有一般人体检测具有的服饰变化、姿态变化等难点外,由于其特定的应用领域还具有以下难点:摄像机是运动的,这样广泛应用于智能监控领域中检测动态目标的方法便不能直接使用;行人检测面临的是一个开放的环境,要考虑不同的路况、天气和光线变化,对算法的鲁棒性提出了很高的要求;实时性是系统必须满足的要求,这 c 2007by Acta Automatica Sinica.All rights reserved.
道路交通标志和标线 GB 5768-1999 本标准是对GB 5768-86《道路交通标志和标线》的修订。保留了原标准中实践证明适用的部分。在总结我国道路交通标志标线设计、制造、施工及检测经验的基础上,根据国内外标志标线技术的发展和交通管理的需要,增加了警告标志、禁令标志、指示标志的数量,进一步向国际标准靠拢。一般道路指路标志重新设计了道路编号标志,增加了地点识别标志、避车道标志和告示牌;城市道路上增加了天桥、地下通道标志、绕行、此路不通等标志。高速公路指路标志是针对最近十几年来在设计、实施和管理中发现的问题及国外标志标准的新规定而增加的,如爬坡车道标志、车距确认标志、道路交通信息标志、旅游区标志及道路施工安全标志及设施等。道路交通标线按功能、设置方式和标线型态进行分类,对标线的颜色和标划方式有了更严格的规定。增加了很多新的标线。本标准为强制性标准,标志的颜色、形状和字符必须按本标准规定执行,道路交通标线的颜色、线条所赋予的遵行、禁止、限制等规定必须严格遵守。 本标准自实施之日起代替GB 5768-86。凡新设的标志标线应按本标准规定实施,已按老标准设置的标志标线应在其使用期限内逐步更换。本标准由中华人民共和国交通部、公安部提出。本标准由全国交通工程设施(公路)标准化技术委员会归口。本标准起草单位:交通部公路科学研究所。本标准主要起草人:杨久龄、唐铮铮、贾梅、雷志彬、刘会学、黄立新、李彦新、何勇、李爱民。本标准于1986年首次发布,1999年第一次修订。本标准委托交通部公路科学研究所负责解释。《道路交通标志和标线》新增加变更的内容分别介绍如下: 1、警告标志用来警告车辆、行人注意危险地点的标志。新标准增加9种警告标志:
信息采集系统解决方案 1系统概述 信息采集是信息服务的基础,为信息处理和发布工作提供数据来源支持。信息数据来源的丰富性、准确性、实时性、覆盖度等指标是信息服务的关键一环,对信息服务质量的影响至关重要。针对交通流信息数据,包括流量、速度、密度等,目前主要是基于微波、视频、地磁等固定车辆检测器以及浮动车等移动式车辆检测器进行采集,各种采集方式都存在响应的利弊。针对车驾管以及出入境数据,包括车辆信息、驾驶人信息、出入境办证进度信息等,主要是通过和公安相关的数据库进行对接,此类信息将在信息分析处理系统进行详细介绍。 针对目前交通信息来源的多样性以及今后服务质量水平发展对信息来源种类扩展要求,需要建设一套统一的,具备良好兼容性和前瞻性的交通信息统一接入接口。一方面,本期项目的各种交通信息来源可以使用该接口进行数据接入,另一方面,当新的或第三方的交通信息来源需要加入到本系统中来时,可以使用该接口进行数据接入,不需要再次投入资源进行额外开发。 统一接入接口建成后,根据各种数据来源系统的网络环境、系统技术特性和交通流信息数据特点,开发相应的交通信息数据对接程序,逐一完成微波采集系统、浮动车分析系统、人工采集等来源的交通信息数据采集接入。 2系统架构及功能介绍 2.1统一接入接口 统一接入接口的建设的关键任务包括接口技术规范制定、路网路段编码规则约定及交通信息数据结构约定等多个方面。
2.1.1接口技术规范 一方面由于本系统接入的交通信息数据来源多样,开发语言和系统运行的环境均存在差异,不具备统一的技术特性;另一方面,考虑到以后可能需要接入更多新的或第三方的信息系统作为数据来源,应当选择较成熟和通用的接口实现技术作为本项目的交通流信息采集统一接入接口实现技术。 根据目前信息系统建设的行业现状,选择Web Service和TCP/UDP Socket 作为数据传输接口的实现技术是较优的选择。Web Service和TCP/UDP Socket 具有实时性强、通用性强、应用广泛、技术支持资源丰富等优势,可以实现跨硬件平台、跨操作系统、跨开发语言的数据传输和信息交换。 项目实施时需要根据现有的信息采集系统的技术特点来具体分析,以选定采用Web Service或TCP/UDP Socket作为接口实现技术,必要时可以两种方式并举,提供高兼容度的接口形式。 为了保护接入接口及其数据传输的安全性,避免恶意攻击访问,避免恶意数据窃取,可以使用身份认证、加密传输等技术来加以保证。 统一数据采集接口的工作流程可以如下进行:
开 题 报 告 -- 监 控 系 统 中 的 行 人 检测算法的实现
毕业设计(论文)开题报告
题 目 监控系统中的行人检测算法的实现
学院
通信工程
专业
信息对抗技术
姓名
班级
学号
指导教师
一、综述本课题国内外研究动态,说明选题的依据和意义
科学技术的快速发展,在给人带来利益和便利的同时,也给人带来了安全隐患。 如为保护某些具有较高的经济价值或技术优势的核心技术及机密而设立的禁区,交 通工具的快速行驶等都会给人们带来安全隐患。因此,监控系统(特别是智能监控 系统)越来越受到人们的重视。纵观各种影响社会安全稳定的事件,给人们带来严 重损失的除不可控因素(地震、火山喷发等)外,主要是人的行为。因此,在监控 系统中实现行人检测将可以避免巨大的人身、经济等损失,也成为了国内外研究的 热点。
目前,清华大学、浙江大学、上海交通大学计算机实验室以及中国科学院自动 化研究所等是国内在行人检测研究上比较著名的高校或研究机构。而且,中国科学 院自动化研究所的生物识别与安全技术研究中心开发的人脸识别系统已经投入使用 (2008 年北京奥运会和 2010 年上海世博会等重大活动)。浙江大学人工智能研究 所采用了单目视觉的方法[1] ,中科院的李和平、胡占义等提出基于监督学习的异常 检测和行为建模算法[2]。国外著名的智能监控系统有 IBM 的智能监控系统和以色列 的 IOImage 公司推出的智能监控系统。另外,卡耐基梅隆大学开发的 NabLab.10 系统已经应用 于汽车的检测系统。虽然国内的监控系统行业近些年发展较快,但是和国外相比仍 有一定的差距。
监控系统中行人检测技术研究至今,比较成熟的算法主要有 Leibe 等人基于“局 部特性的编码”进行的行人检测、Oliver 等人利用边缘图像来对不同的形状模型进行 匹配(ASM)和 Dalal 与 Triggs 提出的基于梯度直方图 HOG+支持向量机 SVM 的行 人检测算法等。而在所有的行人检测技术,基本都包括了运动目标检测和运动目标 识别两个关键技术。
运动目标检测是指通过比较视频图像中像素点的变化判断是否有运动物体,并 通过图像处理技术将运动目标分割出来。运动目标的检测是运动目标识别的前提和 保障,目前主要有光流法和帧差法(包括对称帧差法和背景减除法)。运动目标识别 是对运动目标检测阶段获得的运动目标进行处理,识别出其是行人还是其他的物体。 目前主要有基于运动的方法、基于模板匹配的方法、基于统计学习方法[3]等。
OpenCV 是著名的开源的计算机视觉的函数库,由大量的 C 函数和 C++类构 成作为接口,实现了图像处理和计算机视觉方面的很多通用算法。而且 OpenCV 中 的机器学习函数库实现了机器学习研究领域中比较常见、应用较为广泛的学习方法, 包括了贝叶斯分类器、K 邻近算法、支持向量机、决策树、Adaboost 算法以及神经 网路算法,基本上覆盖了机器学习领域中的主流算法。因此,使用 OpenCV 能够较 灵活的实现行人检测。
道路交通标志标线的施工验收规范
道路交通标志标线的施工 验收规范 篇一:道路交通标志标线质量要求和检测方法 前言 为了确保道路交通标线质量,更好地贯彻实施CB 5768-86《道路交通标志和标线》中标线标准,并使其具有可操作性,特制定本标准。 本标准由中华人民共和国交通部提出。 本标准由交通部公路管理司归口。 本标准由交通部公路科学研究所、交通部标准计量研究所负责起草。 本标准主要起草人:杜玲玲、姜开友。 1 范围 本标准规定了涂料型道路交通标线分类、质量要求及检测方法。适用于公路、城市道路路面上的涂料型交通标线。矿区、港区、场(厂)区路面涂料型交通标线可参照执行。2 引用标准 下列标准包含的条文,通过在本标准中引用而构成本标准
的条文。本标准出版时,所示版本均为有效。所有标准都会被修订,使用本标准的各方应探讨使用下列标准最新版本的可能性。 GB 5768—86 道路交通标志和标线 3 术语 3.1 光亮度因数luminance factor 非自发辐射的媒质面元在给定方向上的光亮度与相同照明条件下理想漫反射(或透射)体的光亮度之比。 3.2 逆反射retroreflection 反射光线从靠近入射光线的反回的反射。 3.3 光强度系数coefficient of luminous intensity 逆反射在观测方向的光强度除以投向逆反射体且落在垂直于入射光方向的平面内的光照度之商。 即: R=I/E (1) 式中:R——光强度系数,mcd2lx-1; I——光强度,mcd; E——光照度,lx。 3.4 逆反射系数coefficient of retroreflection 逆反射面的逆反射光强度系数除以它的面积之商。 即: R'=R/A=I/(E2A)
1绪论 1.1 研究背景 在信息高速发展的今天,几乎所有领域都离不开计算机,在满足人们的习惯方式和生活习惯下,让计算机进行很好的通信,是计算机智能的一个必备的条件。 其中,计算机智能视觉是其应用的重要方向,它是研究使用各种成像输入设备替换人类视觉器官的领域叫智能视觉,并使用智能设备来替代人们完成识别和分析。让智能设备能够像人类一样观察和理解是人们研究计算机视觉,而且智能设备还能随着环境的变化而做出相应的改变。行人检测是计算机视觉的一个具体表现形式,并应用在以下方面:智能监控 目前,为了防止财产安全和留下有效的证据,大部分的公众场所都装备了摄像监控设备。但是,这些监控设备大部分还是有专人进行的查看的,这会导致以下问题的出现,一方面长时间的监控,监控人员很可能出现疲惫,可能导致某些重要信息的遗漏,另一方面不能充分的把监控信息利用起来。然而人工的不足可以利用行人检测相关技术很好的解决,这样不仅可以减少各种资源的投入,又可以让监控的精确度得到很好的改善,当遇到紧急情况有可以及时预警。 车辆辅助系统 随着社会的发展,人民的经济水平不断提高,汽车逐渐走入了千家万户,然而汽车数量的急剧增长也导致了频繁的交通事故,无情的夺去了人们的生命财产安全。如果我们将行人检测系统加入到汽车控制系统中,这样在行驶过程中车辆附近的人们可以被识别出来,极大了避免的交通事故的发生。这样不仅可以有效的降低交通事故,而且这也可以带来汽车行业的革命式变化。实际上,现在有许多公司已经研制出了无人驾驶的汽车,这些车的使用都需要行人检测技术,当然现在的能智能还没进入市场,目前还在试验当中。 高级人机接口 在21世纪,计算机技术得到了迅猛发展,并且愈加趋于智能化的特点,极大地改变了我们的生活方式。我们不仅要求计算机能够快速准确的接收到外界输入的信息,而且能够高效地对信息进行处理并得到最合适的输出信息,作出的相应的反应。人脸识别技术和物体检测技术的发展,可以很好的帮助计算机去获取和处理外界的信息。这不仅
现 代计算机(总第二六三期) MODERNCOMPUTER2007.7 *基金项目:广东省科技计划项目(2002A1010308)收稿日期:2007-05-08修稿日期:2007-06-29 作者简介:曹江中(1976-),男,湖南郴州人,硕士,助教,研究方向为图像信息处理技术及应用 0引言 行人检测是交通信息采集系统的一个重要部分。 高速公路属于全封闭的安全通道,加强对行人的检测对于保障高速公路行车安全是有重要意义的。当检测到路面有行人时,监控中心马上做出相关处理,从而可以迅速地避免交通事故的发生。 1行人检测 1.1背景更新 用于检测行人的视频来自交通信息采集系统,采 用位置固定的摄像机,交通视频的背景相对静止,但由于室外光照的变化和车辆经过时的振动都会引起视频背景的变化,因此需要对背景不断进行更新。根据高速公路行车的特点,设计一个基于像素的背景更新算法[3] ,其基本思路是:给检测区的每一个像素设置 一个计数器Count(i,j),对该计数器作如下操作: ifCti,!"j-Bti,!" j>gray_thr Count(i,j)+1elseCount(i,j)=0 其中Bti,!"j、Cti,!" j分别表示t时刻的背景和采集的图像对应于位置(i,j)处的像素值,gray_thr是灰度阈值,可以根据当时CCD摄像机的电位噪声和地面光照强度来动态设定。 当gray_thr>N时就将当前像素值作为背景(Ct i,!"j←Bt i,!" j),也即:若检测区中像素的灰度连续N 次的变化小于阈值gray_thr。则将该当前像素值作为背景,其中N的值可以根据经验确定,但必须满足下 式: N>50mVmax×! "t式中t为采集连续两帧图像的时间间隔。Vmax为高速公路车辆允许的最大速度。 这种背景更新算法,对于云层阴影、 固定物体的影子、路面水迹等具有较好的适应性,但运动目标进入检测区域后停滞时间较长时会被误认为背景,因此,还需考虑不对运动目标区域进行更新。 1.2运动目标检测 针对高速公路上的行人在视频图像中有效面积较小,运动缓慢的情况,本文采用背景帧差法来检测运动目标。假定获取的背景图像为B,当前图像为C,则在理想情况下当前图像减去背景图像后,像素值发生改变的就是前景区域(运动目标),但在实际应用中,由于采集的图像存在着较大的噪声干扰,往往需要引入一个抑止噪声的阈值thr_gray,如式(1)。图像I中像素值为255的区域则为运动目标区域。 Ii,!" j 255ifabsCij-Bij!">thr_gray 0 ifabsCij-Bij!"<thr_gra$ y (1) 由于运动目标的某些区域往往在灰度上与背景相差不大,检测出的运动区域并不总是一个联通区域,因此还需对其进行后处理,使整个目标区域联通。后处理通常采用的是数学形态学的方法[4]。数学形态学在图像处理方法上表现为邻域运算形式,因此计算量较大,并且交通信息采集系统中的行人检测目的是判断行人的存在与否,并不一定要检测出行人的轮廓,因此我们采用了一种网格降维的方法,将检测区域网格化,划分为互不重叠的5×5的小块,统计小块 交通信息采集系统中的行人检测算法* 曹江中1,戴青云1,谭志标2,邸磊2 (1.广东工业大学信息工程学院,广州510090;2.广东新粤智能交通研究院,广州510101) 摘 要:根据高速公路行人运动的先验知识,设计了一种基于视频检测技术的高速公路行人检测算 法。该算法采用背景帧差分法获取运动目标区域,采用跟踪链实现运动目标跟踪,根据行人运动的先验知识在运动目标中检测行人。算法已嵌入到交通信息采集系统中,在高速公路上进行的现场测试结果表明,算法具有较好的实时性和实效性。 关键词:行人检测;视频检测;运动检测;目标跟踪! "
五、施工组织设计部分 (1)工程概况 工程名称: 工程概况: 施工工期: 开工日期:年月日(具体开工时间以业主的开工令为准) 竣工日期:年月日 质量标准:合格 工程内容:标志、标线、标牌施工 (一)、技术要求的依据 1、《道路交通标志和标线》(GB5768-2009). 3、《道路交通标线质量要求和检测方法》(GB/T16311-2005). 7、《路面标线涂料》(JT/T280-2004) 12、《突起路标》(JT/T 390—1999) 17、其他“国家、行业、地方标准与规范”中涉及的技术要求 18、若以上标准、要求与以下技术要求不一致时,应按以下技术要求为准。 (二)道路交通标线 1、材料要求 〖1〗路面标线所用的材料应符合《路面标线涂料》(JT/T280—2004)的规定,并按照采购人要求选用热熔反光、热熔突起(震荡)、双组份刮涂标线涂料,能满足在沥青混凝土、水泥混凝土路面上耐久使用的要求,且均应有合适的施工机械与之配套,并严格按照《道路交通标志和标线》(GB 5768-2009)、《道路交通标线质量要求和检测方法》(GB/T 16311-2009)和国家有关规范、标准施工验收。 路面标线涂料的分类见《路面标线涂料》(JT/T280—2004)表1。 〖2〗涂料的技术要求符合《路面标线涂料》(JT/T280—2004)表3和表4的规定,且热熔反光标线的厚度为≥1.8mm,热熔突起(震荡)标线的厚度为≥8mm,双组份刮涂标线的厚度为≥1.2mm。 2、施工要求
〖1〗路面标线 (1)设置标线的路面表面应清洁干燥,无松散颗粒、灰尘、沥青、油污或其他有害物质。 (2)在水泥路面或旧的沥青路面施加标线需要先完全清除老旧标线,后使用机械吹扫路面并喷涂热熔底油下涂剂,按试验决定的间隔时间喷涂热熔涂料,以提高其粘结力。 (3)为了确保标线涂料和路面材料完全相适应,底油的类型和用量应经采购人和项目负责人批准。 (4)标线的颜色为白色和黄色,应符合《路面标线涂料》(JT/T280-2004)的要求,并按采购人和项目负责人同意的方法施工。喷涂机具应使用自行式机械。 (5)标线宽度、虚线长及间隔、点线长及间隔、双标线的间隔,应按《道路交通标志和标线》(GB 5768-2009)规定办理。 (6)特殊标线的图案、标记,如箭头及字母等的尺寸应按图纸要求和《道路交通标志和标线》(GB 5768-2009)规定办理。 (7)所有标线应具有顺直、平顺、光洁、均匀及精美外观;干膜厚度符合要求,否则,应由承包人予以更正并经采购人同意,费用由承包人自负。 (8)有缺陷的、施工不当、尺寸不正确或位置错误的标线均应清除,路面应修补,材料应更换,并经采购人同意,其费用由承包人自理。 (9)涂料在容器内加热时,温度应控制在涂料生产商的使用说明规定值内,不得超过最高限制温度。烃树脂类材料,保持在熔融状态的时间不大于6h;树胶树脂类材料,保持在熔融状态的时间不大于4h。 (10)涂料刮涂于路面时的温度,应符合涂料生产商提供的使用说明的要求。 (11)施工应按采购人避开交通高峰时段进行,雨天、尘埃大、风大、温度低于10℃时应暂时停止施工。 (12)玻璃珠的撒布应经试验并获采购人和项目负责人的批准方可实施。撒布玻璃珠应在涂料刮涂后立即进行,以0.3kg/m2的用量加压撒布在所有标线上。 (13)标线施工时,应有交通安全措施,设置适当警告标志,阻止车辆及行人在作业区内通行,防止将涂料带出或形成车辙,直至标线充分干燥。 (14)热熔突起(震荡)标线是在路面上一次成型长方形排骨式突起的高亮
机器视觉的辅助驾驶系统的视频中行人 实时检测识别研究文献综述 1机器视觉发展 国外机器视觉发展的起点难以准确考证,其大致的发展历程是:20世纪50年代提出机器视觉概念,20世纪70年代真正开始发展,20世纪80年代进入发展正轨,20世纪90年代发展趋于成熟,20世纪90年代后高速发展。在机器视觉发展的历程中,有3个明显的标志点,一是机器视觉最先的应用来自“机器人”的研制,也就是说,机器视觉首先是在机器人的研究中发展起来的;二是20世纪70年代CCD图像传感器的出现,CCD摄像机替代硅靶摄像是机器视觉发展历程中的一个重要转折点;三是20世纪80年代CPU、DSP等图像处理硬件技术的飞速进步,为机器视觉飞速发展提供了基础条件。 国内机器视觉发展的大致历程:真正开始起步是20世纪80年代,20世纪90年代进入发展期,加速发展则是近几年的事情。中国正在成为世界机器视觉发展最活跃的地区之一,其中最主要的原因是中国已经成为全球的加工中心,许许多多先进生产线己经或正在迁移至中国,伴随这些先进生产线的迁移,许多具有国际先进水平的机器视觉系统也进入中国。对这些机器视觉系统的维护和提升而产生的市场需求也将国际机器视觉企业吸引而至,国内的机器视觉企业在与国际机器视觉企业的学习与竞争中不断成长。 未来机器视觉的发展将呈现下列趋势: (1)技术方面的趋势是数字化、实时化、智能化 图像采集与传输的数字化是机器视觉在技术方面发展的必然趋势。更多的数字摄像机,更宽的图像数据传输带宽,更高的图像处理速度,以及更先进的图像处理算法将会推出,将会得到更广泛的应用。这样的技术发展趋势将使机器视觉系统向着实时性更好和智能程度更高的方向不断发展。 (2)产品方面:智能摄像机将会占据市场主要地位 智能摄像机具有体积小、价格低、使用安装方便、用户二次开发周期短的优点,非常适合生产线安装使用,越来越受到用户的青睐,智能摄像机所采用的许多部件与技术都来自IT行业,其价格会不断降低,逐渐会为最终用户所接受。因此,
交通信息采集与发布系统 4.1 交通信息采集系统 4.1.1 前言概况 现在社会交通的发展,交通检测器的应用越来越普及。交通检测器以车辆为检测目标,检测车辆的通过或存在状况,也检测路上车流的各种参数,其作用是为控制系统提供足够的信息以便进行最优的控制。常用的检测器有环形线圈检测器、超声波检测器、红外线检测器、微波检测器、视频图像处理机等。 检测器种类很多,其工作原理大致可分为两类:①检测能使某种开关触点闭合的机械力;②检测因车辆的运动或存在引起的能量变化。压力检测器就是利用机械力检测的例子,而利用能量变化进行检测则有环形线圈检测器超声波检测 按照能否检测静止车辆来分,检测器可分为两类。有些检测器如环形线圈、磁强计检测器能检测存在于检测区域的静止或运动的车辆,这类检测器称为存在型检测器;而另一类检测器只能检测运动通过检测区域的车辆,这类检测器称作通过型检测器。 检测器还可以检测和交通有关的环境条件,以便在出现有害的环境条件时能够对交通进行控制或提出警告。 4.1.2 信息采集方式 环形线圈检测器 1) 环形线圈检测器的构成及其检测原理环形线圈检测器是一种基于电磁感应原理的 车辆检测器,它的传感器是一个埋在路面下面、通过一定工作电流的环形线圈。 当车辆通过线圈或停在线圈上时,车辆引起线圈回路电感量的变化,检测器检测出
变化量就可以检测出车辆的存在,从而达到检测目的。 环形线圈检测器主要包括:环形线圈、线圈调谐回路和检测电路。 1、环形线圈 环形线圈是由专用电缆几匝构成(一般为4 匝),一般规格为2m×2m 的正方形,根据不同的需要,可以改变线圈的形状和尺寸。对车辆检测起直接作用的是环形线圈回路的总电感。总电感主要包括环形线圈的自感和线圈与车辆之间的互感。当铁磁性的车体进入环形线圈时,车体内会感生涡电流,并且产生与环路向耦合但方向相反的电磁场,即互感,降低线圈环路电感。由于线圈设计成涡流影响占支配地位的状态,所以环路总电感量L 减少。检测出线圈环路电感量的变化,就可以判断车辆的存在或通过。 2、调谐回路环形线圈作为一个感应元件,通过一个变压器接到被恒流源支持的调谐回路上,该调谐回路是LC 谐振回路,设计选择电容C, 使调谐回路有一个固定的震荡频率。车辆进入环形线圈将使回路总电感L 减少,因而也会使震荡回路频率增大。只要将该回路的输出送检测电路处理得到频率随时间变化的信号就可以检测出是否有车辆通过。 3、信号检测与输出 检测电路包括相位锁定器、相位比较器、输出电路等,现在很多型号的环形线圈检测器还包含微处理器,它与检测电路一起构成信号检测处理单元。相位比较器的一个输入信号是相位锁定器的输出信号,其频率为调谐回路的固有震荡频率,另一个输入信号跟踪车辆通过线圈时谐振回路的频率变化,从而使输出的信号为一反映频率随时间变化的电压信号也就是反映车辆通过环形线 圈的过程的信号 输出电路先将相位比较器输出的信号进行放大,然后以两种方式输出,即模拟量输出、数字量输出。模拟量输出用来分别车型,数字信号输出用来计数或控制。亦可用微机综合处理输出信号获得各种交通参数。带有微处理机的环形线圈 检测器则可以直接做到这一点。 2)环形线圈检测系统的构成 环形线圈检测系统包括埋于路面下面的环形线圈、接线盒、传输电缆、信号检测处理单元等。检测车辆时,将一个或多个环形线圈按一定的方法埋于路面下,线头接入接
基于opencv中光流法的运动 行人目标跟踪与检测 一、课题研究背景及方法 行人检测具有极其广泛的应用:智能辅助驾驶,智能监控,行人分析以及智 能机器人等领域。从2005年以来行人检测进入了一个快速的发展阶段,但是也存在很多问题还有待解决,个人觉得主要还是在性能和速度方面还不能达到一个权衡。 早期以静态图像处理中的分割、边缘提取、运动检测等方法为主。例如 (1)以Gavrila为代表的全局模板方法:基于轮廓的分层匹配算法,构造了将近2500个轮廓模板对行人进行匹配, 从而识别出行人。为了解决模板数量众多而引起的速度下降问题,采用了由粗到细的分层搜索策略以加快搜索速度。另外,匹配的时候通过计算模板与待检测窗口的距离变换来度量两者之间的相似性。 (2)以Broggi为代表的局部模板方法:利用不同大小的二值图像模板来对人头和肩部进行建模,通过将输入图像的边缘图像与该二值模板进行比较从而识别行人,该方法被用到意大利Parma大学开发的ARGO智能车中。 (3)以Lipton为代表的光流检测方法:计算运动区域内的残余光流; (4)以Heisele为代表的运动检测方法:提取行人腿部运动特征; (5)以Wohler为代表的神经网络方法:构建一个自适应时间延迟神经网络来判断是否是人体的运动图片序列; 以上方法,存在速度慢、检测率低、误报率高的特点。 2、行人检测的研究现状
(1)基于背景建模的方法:分割出前景,提取其中的运动目标,然后进一步 提取特征,分类判别;在存在下雨、下雪、刮风、树叶晃动、灯光忽明忽暗等场 合,该方法的鲁棒性不高,抗干扰能力较差。且背景建模方法的模型过于复杂,对 参数较为敏感。 (2)基于统计学习的方法:根据大量训练样本构建行人检测分类器。提取的 特征一般有目标的灰度、边缘、纹理、形状、梯度直方图等信息,分类器包括神经 网络、SVM,adaboost等。该方法存在以下难点: (a)行人的姿态、服饰各不相同; (b)提取的特征在特征空间中的分布不够紧凑; (c)分类器的性能受训练样本的影响较大; (d)离线训练时的负样本无法涵盖所有真实应用场景的情况; 尽管基于统计学习的行人检测方法存在着诸多的缺点,但依然有很多人将注 意力集中于此。 行人检测国外研究情况: 法国研究人员Dalal在2005的CVPR发表的HOG+SVM的行人检测算法(Histograms of Oriented Gradients for Human Detection, Navneet Dalel,Bill Triggs, CVPR2005)。 Dollar 在 2010 年 BMVC 的《The fastest pedestrian detector in the west》一文中提出了一种新的思想,这种思想只需要训练一个标准 model,检测N/K(K ≈10)然后其余的 N-N/K 种大小的图片的特征不需要再进行这种复杂的计算,而是跟据这 N/K 次的结果,由另外一种简单的算法给估计出来,这种思 想实现的基础是大小相近的图像的特征可以被足够精确的估计出来;同年,德国