脉冲编码调制(PCM)系统设计与仿真
摘要: SystemView 仿真软件可以实现多层次的通信系统仿真。脉冲编码调制(PCM)是现代语音通信中数字化的重要编码方式。利用SystemV iew 实现脉冲编码调制(PCM)仿真,可以为硬件电路实现提供理论依据。通过仿真展示了PCM编码实现的设计思路及具体过程,并加以进行分析。
关键词: PCM 编译码
1、引言
随着电子技术和计算机技术的发展,仿真技术得到了广泛的应用。基于信号的用于通信系统的动态仿真软件SystemV iew具有强大的功能,可以满足从底层到高层不同层次的设计、分析使用,并且提供了嵌入式的模块分析方法,形成多层系统,使系统设计更加简洁明了,便于完成复杂系统的设计。
SystemV iew具有良好的交互界面,通过分析窗口和示波器模拟等方法,提供了一个可视的仿真过程,不仅在工程上得到应用,在教学领域也得到认可,尤其在信号分析、通信系统等领域。其可以实现复杂的模拟、数字及数模混合电路及各种速率系统,并提供了内容丰富的基本库和专业库。本文主要阐述了如何利用SystemV iew实现脉冲编码调制(PCM)。系统的实现通过模块分层实现,模块主要由PCM编码模块、PCM译码模块、及逻辑时钟控制信号构成。通过仿真设计电路,分析电路仿真结果,为最终硬件实现提供理论依据。
2、系统介绍
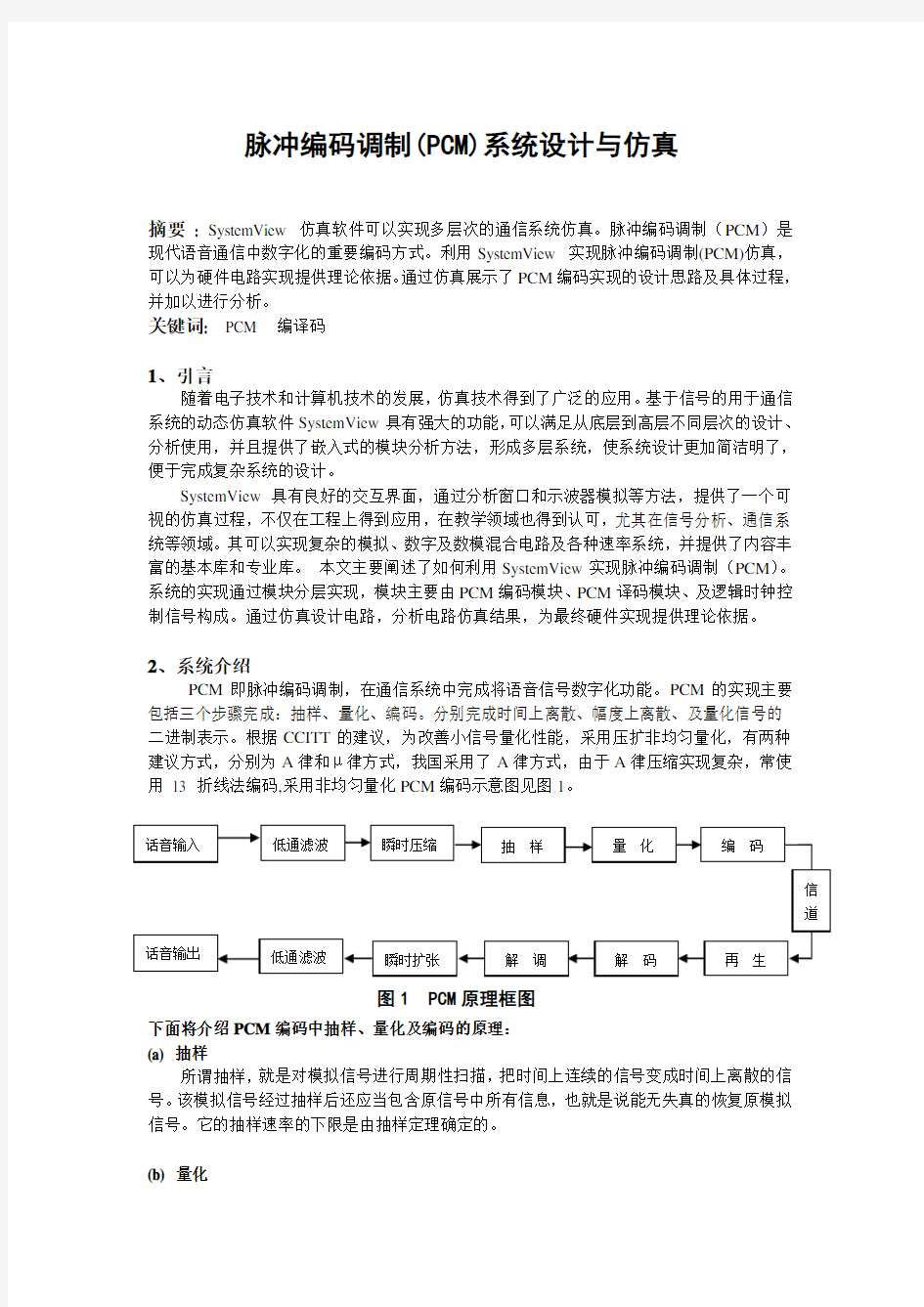
PCM即脉冲编码调制,在通信系统中完成将语音信号数字化功能。PCM的实现主要包括三个步骤完成:抽样、量化、编码。分别完成时间上离散、幅度上离散、及量化信号的二进制表示。根据CCITT的建议,为改善小信号量化性能,采用压扩非均匀量化,有两种建议方式,分别为A律和μ律方式,我国采用了A律方式,由于A律压缩实现复杂,常使用13 折线法编码,采用非均匀量化PCM编码示意图见图1。
图1 PCM原理框图
下面将介绍PCM编码中抽样、量化及编码的原理:
(a) 抽样
所谓抽样,就是对模拟信号进行周期性扫描,把时间上连续的信号变成时间上离散的信号。该模拟信号经过抽样后还应当包含原信号中所有信息,也就是说能无失真的恢复原模拟信号。它的抽样速率的下限是由抽样定理确定的。
(b) 量化
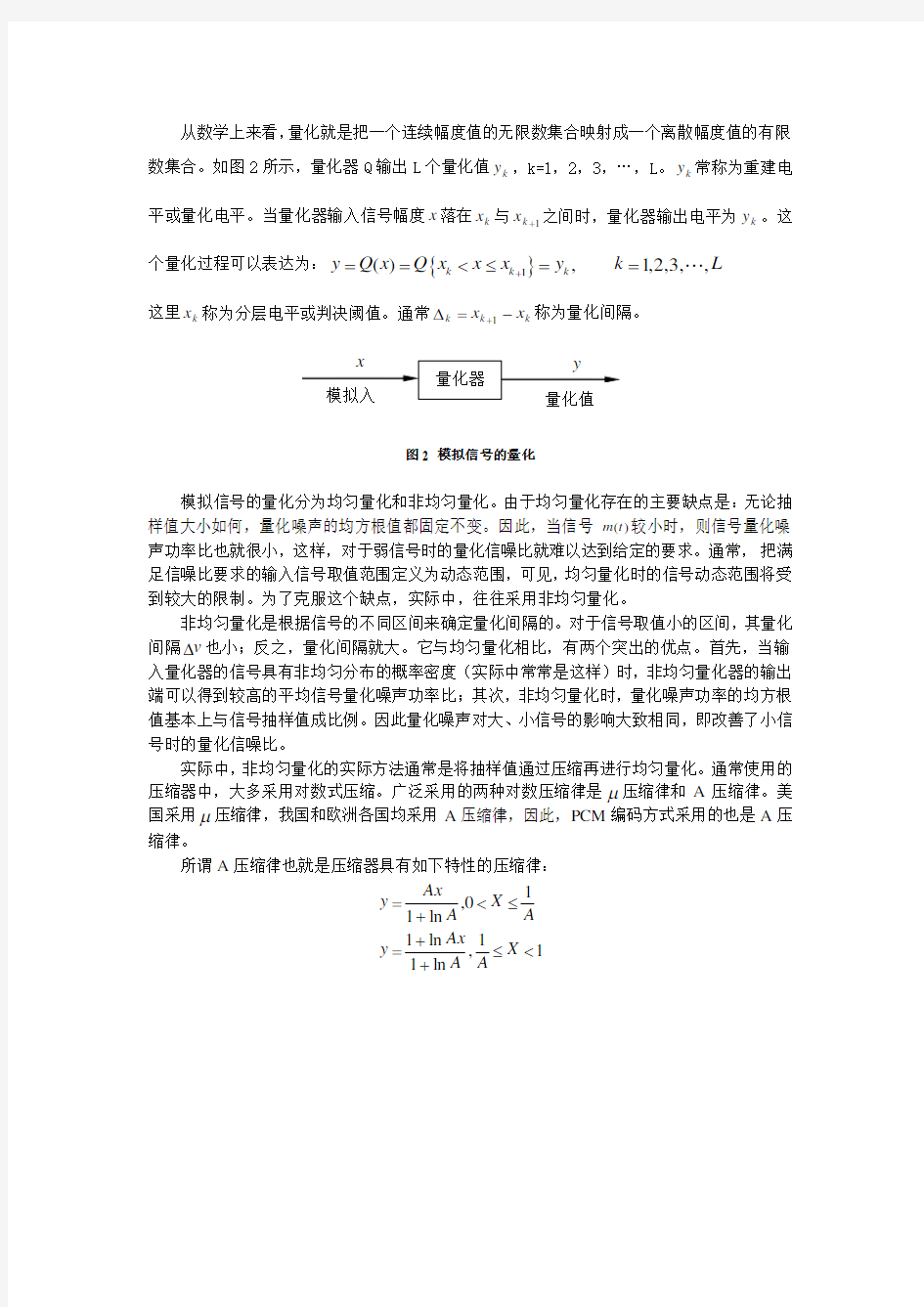
从数学上来看,量化就是把一个连续幅度值的无限数集合映射成一个离散幅度值的有限数集合。如图2所示,量化器Q 输出L 个量化值k y ,k=1,2,3,…,L 。k y 常称为重建电平或量化电平。当量化器输入信号幅度x 落在k x 与1+k x 之间时,量化器输出电平为k y 。这个量化过程可以表达为:{}1(),
1,2,3,,k k k y Q x Q x x x y k L +==<≤==
这里k x 称为分层电平或判决阈值。通常k k k x x -=?+1称为量化间隔。
图2 模拟信号的量化
模拟信号的量化分为均匀量化和非均匀量化。由于均匀量化存在的主要缺点是:无论抽样值大小如何,量化噪声的均方根值都固定不变。因此,当信号()m t 较小时,则信号量化噪声功率比也就很小,这样,对于弱信号时的量化信噪比就难以达到给定的要求。通常,把满足信噪比要求的输入信号取值范围定义为动态范围,可见,均匀量化时的信号动态范围将受到较大的限制。为了克服这个缺点,实际中,往往采用非均匀量化。
非均匀量化是根据信号的不同区间来确定量化间隔的。对于信号取值小的区间,其量化间隔v ?也小;反之,量化间隔就大。它与均匀量化相比,有两个突出的优点。首先,当输入量化器的信号具有非均匀分布的概率密度(实际中常常是这样)时,非均匀量化器的输出端可以得到较高的平均信号量化噪声功率比;其次,非均匀量化时,量化噪声功率的均方根值基本上与信号抽样值成比例。因此量化噪声对大、小信号的影响大致相同,即改善了小信号时的量化信噪比。
实际中,非均匀量化的实际方法通常是将抽样值通过压缩再进行均匀量化。通常使用的压缩器中,大多采用对数式压缩。广泛采用的两种对数压缩律是μ压缩律和A 压缩律。美国采用μ压缩律,我国和欧洲各国均采用A 压缩律,因此,PCM 编码方式采用的也是A 压缩律。
所谓A 压缩律也就是压缩器具有如下特性的压缩律:
A
X A Ax y 10,ln 1≤<+=
11,ln 1ln 1<≤++=
X A
A
Ax
y
A律压扩特性是连续曲线,A值不同压扩特性亦不同,在电路上实现这样的函数规律是相当复杂的。实际中,往往都采用近似于A律函数规律的13折线(A=87.6)的压扩特性。这样,它基本上保持了连续压扩特性曲线的优点,又便于用数字电路实现,本设计中所用到的PCM编码正是采用这种压扩特性来进行编码的。图3示出了这种压扩特性。
图3 13折线
表1列出了13折线时的x值与计算x值的比较。
表1
表1中第二行的x值是根据6.
A时计算得到的,第三行的x值是13折线分段时的
=
87
值。可见,13折线各段落的分界点与6.
A曲线十分逼近,同时x按2的幂次分割有利于
87
=
数字化。
(c) 编码
所谓编码就是把量化后的信号变换成代码,其相反的过程称为译码。当然,这里的编码和译码与差错控制编码和译码是完全不同的,前者是属于信源编码的范畴。
在现有的编码方法中,若按编码的速度来分,大致可分为两大类:低速编码和高速编码。通信中一般都采用第二类。编码器的种类大体上可以归结为三类:逐次比较型、折叠级联型、混合型。在逐次比较型编码方式中,无论采用几位码,一般均按极性码、段落码、段内码的顺序排列。下面结合13折线的量化来加以说明。
表2 段落码表3 段内码
在13折线法中,无论输入信号是正是负,均按8段折线(8个段落)进行编码。若用8位折叠二进制码来表示输入信号的抽样量化值,其中用第一位表示量化值的极性,其余七位(第二位至第八位)则表示抽样量化值的绝对大小。具体的做法是:用第二至第四位表示段落码,它的8种可能状态来分别代表8个段落的起点电平。其它四位表示段内码,它的16种可能状态来分别代表每一段落的16个均匀划分的量化级。这样处理的结果,8个段落被划分成27=128个量化级。段落码和8个段落之间的关系如表2所示;段内码与16个量化级之间的关系见表3。
PCM编译码器的实现可以借鉴单片PCM编码器集成芯片,如:TP3067A、CD22357等。单芯片工作时只需给出外围的时序电路即可实现,考虑到实现细节,仿真时将PCM编译码器分为编码器和译码器模块分别实现。
2.1、信号源子系统的组成:由三个幅度相同、频率不同的正弦信号(图符7、8、
9)合成,如下图4所示:
图4
2.2、PCM编码器模块
PCM编码器模块主要由信号源(图符7)、低通滤波器(图符15)、瞬时压缩器(图符16)、A/D转换器(图符8)、并/串转换器(图符10)、输出端子构成(图符9),实现模型如下图5所示:
图5
信源信号经过PCM 编码器低通滤波器(图符15)完成信号频带过滤,由于PCM量化采用非均匀量化,还要使用瞬时压缩器实现A律压缩后再进行均匀量化,A/D转换器(图符8)
完成采样及量化,由于A/D转换器的输出是并行数据,必须通过数据选择器(图符10)完成并/串转换成串行数据,最后通过图符(9)输出PCM编码信号。
2.2.1 PCM编码器组件功能实现
(1)低通滤波器:为实现信号的语音频率特性,考虑到滤波器在通带和阻带之间的过渡,采用了低通滤波器,而没有设计带通滤波器。为实现信号在300Hz-3400Hz的语音频带内,在这里采用了一个阶数为3阶的切比雪夫滤波器,其具有在通带内等波纹、阻带内单调的特性。
(2)瞬时压缩器:瞬时压缩器(图符16)使用了我国现采用A律压缩,注意在译码时扩张器也应采用A律解压。对比压缩前后时域信号(见图6, 图7),明显看到对数压缩时小信号明显放大,而大信号被压缩,从而提高了小信号的信噪比,这样可以使用较少位数的量化满足语音传输的需要。
图6压缩前
图7压缩后
(3)A/D 转换器:完成经过瞬时压缩后信号时间及幅度的离散,通常认为语音的频带在300Hz-3400Hz,根据低通采样定理,采样频率应大于信号最高频率两倍以上,在这里A/D 的采样频率为8Hz即可满足,均匀量化电平数为256级量化,编码用8bit表示,其中第一位为极性表示,这样产生了64kbit/s的语音压缩编码。
(4)数据选择器:图符10为带使能端的8路数据选择器,与74151功能相同,在这里完成A/D转换后的数据的并/串转换,图符11、12、13为选择控制端,在这里控制轮流输出并行数据为串行数据。通过数据选择器还可以实现码速转换功能。
2.3、PCM译码器模块
PCM译码器是实现PCM编码的逆系统。PCM译码器模块主要由ADC出来的PCM数据输出端、D/A转换器、瞬时扩张器、低通滤波器构成。实现模型如下图8所示:
图8
2.3.1 PCM译码器组件功能实现
(1)D/A转换器(图符1):用来实现与A/D转换相反的过程,实现数字量转化为模拟量,从而达到译码最基本的要求,也就是最起码要有步骤。
(1)瞬时扩张器(图符8):实现与瞬时压缩器相反的功能,由于采用A律压缩,扩张也必须采用A律瞬时扩张器。
(2)低通滤波器(图符3):由于采样脉冲不可能是理想冲激函数会引入孔径失真,量化时也会带来量化噪声,及信号再生时引入的定时抖动失真,需要对再生信号进行幅度及相位的补偿,同时滤除高频分量,在这里使用与编码模块中相同的低通滤波器。
3、系统仿真模型如下图9:
图9系统模型
子系统(图符12)如下图10:
图10 子系统
以上图9、图10各方块的有关参数如表4:
表4
4、仿真波形如下: (1)信号源的波形
(2)信号源经压缩后的波形
(3)PCM编码的波形
(4)PCM译码时经过D/A转化并用A律扩张后的输出波形
(5)译码后恢复源信号的输出波形
由以上数据波形可以看出在PCM编码的过程中,译码输出的波形具有一定的延迟现象,其
波形基本上不失真的在接收端得到恢复,传输的过程中实现了数字化的传输过程。
5、参考文献
[1] 吴伟陵,续大我,庞沁华.通信原理.北京邮电大学出版社,2005
[2] 青松,程岱松,武建华.数字通信系统的SystemView仿真与分析.北京航空航天大学出版社,2001
[3] 曹志刚,钱亚生. 现代通信原理.清华大学出版社,1992
[4] 苗长云等主编.现代通信原理及应用.电子工业出版社,2005
[5] 罗卫兵/孙桦/张捷.SystemV iew动态系统分析及通信系统仿真设计.西安电子科技大学出版社,2001
6、设计过程中需解决的问题
(1)首先,必须根据实际情况合理的设计采样频率和抽样脉冲的参数,以防波形的失真,由于在刚开始的时候,没有合理设置采样频率的参数,出现了在译码时恢复波形的失真,最后根据采样频率fs大于等于2fH条件,通过不断调试,最终可以合理地恢复源信号波形。但由于在信道传输过程中由于各种原因而引起译码波形有一定的延时现象。
(2)在调试带使能端的8路数据选择器在实现PCM编码输出的并行数据转换为串行数据输出时,起初由于没有合理应用选择控制端,而导致数据输出毫无规律,即八路数据当中随机地从哪一路输出,最后通过设置频率不同的三路脉冲方波作用于选择控制端,去控制每一路的数据输出,然后经过调试完成了PCM编码的正确输出。
(3)在设计滤波器时,首先要看系统信号源输出信号频率到底是处于在哪个频率范围,再根据其他参考参数和系统各项技术要求,决定是要设计哪种类型的滤波器,是低通型还是带通型滤波器。
7、心得体会
本次课程设计在刚开始的过程中无从下手,手忙脚乱,时间又紧,最终决定用软件仿真来实现PCM的编码过程。通过这次设计,掌握了PCM编码的工作原理及PCM系统的工作过程,学会了使用仿真软件SystemV iew(通信系统的动态仿真软件),并学会通过应用软件仿真来实现各种通信系统的设计,对以后的学习和工作都起到了一定的作用,加强了动手能力和学业技能。总体来说,这次实习我受益匪浅。在摸索该如何设计电路使之实现所需功能的过程中,特别有趣,培养了我的设计思维,增加了实际操作能力。在让我体会到了设计电路的艰辛的同时,更让我体会到成功的喜悦和快乐。
机电一体化原理应掌握的知识(doc 9页)
机电一体化原理应掌握的重要知识点(简答) 第二章机械系统设计 1.机电一体化共性关键技术包括机械技术、计算机与信息处理技术、检测与传感技术、自动控制技术、伺服驱动技术、系统总体技术 2.机电一体化对机械系统的基本要求:(1). 精度高、刚度高、无间隙(尽可能小) (2). 响应快、摩擦小、惯量小、谐振频率高(高接触刚度,可避免共振) (3). 稳定性好、可靠性高、阻尼合适、体积小、重量轻、寿命长等 3.机械系统的组成包括传动机构、导向机构(起导向与支承作用 )、执行机构 4.滚珠丝杠副轴向间隙的调整和加预紧力的方法有垫片调隙式、螺纹调隙式、齿差调隙式 5.滚珠丝杠副的支承方式有一端固定、一端自由;一端固定、一端游动;两端固定三种 6.工业机器人的机械夹持器可分为圆弧开合型、圆弧平行开合型、直线平行开合型三种 第三章直流电动机的工作原理及特性 1.直流电动机的优缺点:优点:调速、启动、制动性能好,控制器简单,短时过载能力强。缺点:结构较复杂,价格较高,换向器与电刷处有火花放电腐蚀,需定期维护。 2.直流电动机与直流发电机的工作原理 直流电动机:电动机定子提供磁场,直流电源向转子的绕组提供电流,换向器使转子电流与磁场产生的转矩保持方向不变。 直流发电机:直流发电机的工作原理就是把电枢线圈中感应产生的交变电动势,靠换向器配合电刷的换向作用,使之从电刷端引出时变为直流电动势的原理。 3.直流电动机/发电机内部的电磁感应公式,机械特性指电动机转速与电磁转矩间的关系,已知直流他励电动机机械特性公式,会推导
(8) (9) 9.结合直流他励电动机的机械特性曲线简述反馈制动的原理、特点 原理:当电机n>n0时,因电枢电流方向改变,电磁转矩方向也改变,成为制动转矩。特点:制动转矩大,速度稳定性好,效率高,节能。 10.直流电动机启动方法有电枢串电阻启动、降压启动 11.大直流电动机为什么不允许在额定电压下直接启动? (1)、启动电流Ist太大会使换向器产生严重的火花,烧坏换向器;破坏电网工作。(2)、启动转矩太大,机械冲击太大,使传动机构损坏。 12.结合直流他励电动机的机械特性曲线简述电源反接制动的原理、特点
交通信控制仿真系统开 发 The manuscript was revised on the evening of 2021
摘要 随着我国经济的增长,人民的生活越来越好。汽车作为一种代步工具,得到了许多人的青睐,很多人都买了车,这直接导致了城市的交通压力剧增,城市道路经常会出现交通堵塞的情况。交通事故的频发时刻在提醒着我们需要一个更加智能的交通控制系统。随着计算机的普及,各行各业在日常的生产中依赖于计算机的情况越来越普遍。智能交通也有了一席之地,利用计算机技术来控制交通逐渐演变成了新型的交通控制方式。在一个交通控制方案正式投入使用之前,需要对其可行性进行精准的可行性分析。否则,如果这个方案有错误,将会直接带来巨大的经济损失,以及对人民的生命安全带来巨大的威胁。在这样的前提下,智能交通控制系统的仿真就应运而生了。智能交通仿真可以在无真人参与的情况下,实际模拟出交通运行的真实情况,极大的方便了交通控制方案的可行性的检验,并且可以节省许多成本。 【关键词】交通压力计算机交通控制仿真 Abstract With the development of China’s economy, people’s life becomes better and better. As a tool of transportation, vehicles are becoming more and more popular .Many people in our country have cars which directly cause the dramatic increase of the traffic pressure and many traffic jams in our city every day. Many traffic accidents remind us that we need a more intelligent traffic control system. With the popularity of computers, relying on using computers in our diverse daily productions will be more and more pervasive. Intelligent transportation also can play
二○一三~二○一四学年第二学期 信息科学与工程学院课程设计报告书 课程名称:通信原理 班级:电信(DB)1103 学号:201112135090 姓名:阮珊珊 指导教师:杨莘 二○一四年六月
摘要 数字信号的传输方式分为基带传输和带通传输。然而,实际中的大多数信道(如无线信道)因具有带通特性而不能直接传送系带信号,这是因为数字基带信号往往含有丰富的低频分量。为了使数字信号在带通信道中传输,必须用数字基带信号对载波进行调制,以使信号与信道的特性相匹配。这种用数字基带信号控制载波,把数字基带信号变换为数字带通信号的过程称为数字调制。在接收端通过解调器把贷通信号还原成数字基带信号的过程称为数字解调。通常把调制和解调过程的数字传输系统叫做数字带通传输系统。 一般来说,数字调制与模拟调制的原理基本相同,但是数字信号有离散取值的特点。因此数字调制技术有两种方法:①利用模拟调制的方法去实现数字式调制,即把数字调制看成是模拟调制的一个特例,把数字基带信号当做模拟信号的特殊情况处理;②利用数字信号的离散取值特点通过开关键控载波,从而实现数字调制。这种方法通常称为键控法,对载波的振幅、频率和相位进行键控,即可获得ASK、FSK、PSk三种基本数字调制方式。 本次课程设计主要是运用MATLAB集成环境下的Simulink仿真平台设计一个2PSK数字信号调制解调系统。 设计采用的是键控法进行调制。 关键字:Matlab Simulink 2P
目录 一、课程设计目的 (4) 二、课程设计时间安排 (4) 三、课程设计及要求 (4) 1.基本工作原理 (4) 1)数字通信系统 (4) 2)调制方法:键控法 (5) 3)解调方法:相干解调法 (5) 2、设计系统 (5) 1)Simulink仿真框图 (5) 2)工作原理 (6) 3)设定参数 (7) 3 .MATLAB仿真 (12) 1)波形仿真图 (12) 4)分析基带信号和已调信号的功率谱密度 (15) 5)误码率分析 (16) 四、课程设计心得体会 (19) 五、参考文献 (20)
控制系统仿真与设计实验报告 姓名: 班级: 学号: 指导老师:刘峰 7.2.2控制系统的阶跃响应 一、实验目的 1.观察学习控制系统的单位阶跃响应; 2.记录单位阶跃响应曲线; 3.掌握时间相应的一般方法; 二、实验内容 1.二阶系统G(s)=10/(s2+2s+10)
键入程序,观察并记录阶跃响应曲线;录系统的闭环根、阻尼比、无阻尼振荡频率;记录实际测去的峰值大小、峰值时间、过渡时间,并与理论值比较。 (1)实验程序如下: num=[10]; den=[1 2 10]; step(num,den); 响应曲线如下图所示: (2)再键入: damp(den); step(num,den); [y x t]=step(num,den); [y,t’] 可得实验结果如下:
记录实际测取的峰值大小、峰值时间、过渡时间,并与理论计算值值比较 实际值理论值 峰值 1.3473 1.2975
峰值时间 1.0928 1.0649 过渡时间+%5 2.4836 2.6352 +%2 3.4771 3.5136 2. 二阶系统G(s)=10/(s2+2s+10) 试验程序如下: num0=[10]; den0=[1 2 10]; step(num0,den0); hold on; num1=[10]; den1=[1 6.32 10]; step(num1,den1); hold on; num2=[10]; den2=[1 12.64 10]; step(num2,den2); 响应曲线:
(2)修改参数,分别实现w n1= (1/2)w n0和w n1= 2w n0响应曲线试验程序: num0=[10]; den0=[1 2 10]; step(num0,den0); hold on; num1=[2.5]; den1=[1 1 2.5]; step(num1,den1); hold on; num2=[40]; den2=[1 4 40]; step(num2,den2); 响应曲线如下图所示:
内蒙古民族大学2013-2014学年二学期 试卷答案(考查) 课程名称:机械系统设计考试时间:110分钟年级:11级 专业:机制、农机 一、简答题(6小题,共60分) 1、什么是专家系统?专家系统的作用是什么?简述现代虚拟样机仿真分析的目的与意义。答:一个或一组能在某特定领域内,以人类专家水平去解决该领域中困难问题的计算机程序。 专家系统的作用:减少设计人员的负担;适用于常规方法和分析程序无能为力的地方;快速;防止设计人员出错及保留系统的知识和经验的领域。 虚拟样机仿真分析的目的与意义:化设计;缩短周期、降低成本;提高性安全性;提高产品开发效率及产品设计质量。 2、试从人机工程学观点分析汽车驾驶室的布置设计。 答:人机工程学是运用生理学、心理学和其他有关学科知识,使人和机器相互适应,创造舒适和安全的环境条件从而提高工效的学科。 驾驶座椅的设计,根据不同的体格可以调整高度和前后位置。而且坐姿操作可减少疲劳。显示装置的设计,如速度里程表、油表等的设计充分利用人体工程及人的视觉习惯,便于观察,警醒作用。操纵装置设计,方向的大小以人施力最适宜的尺寸,而且活动灵活,长期驾驶不易疲劳。档位杆的设计充分考虑人手生理学特点,手握舒适,不产生滑动,施力方便。脚操纵的刹车,离合,油门等,与坐姿操作相适应。踏板采用矩形或椭圆性。转向按钮与方向盘一体便于操作。照明灯及前后镜子的设计也充分考虑人的视觉规律。 汽车驾驶室的设计,充分运用人体工程学的原理,使人在最舒适最不易疲劳的最易观察的角度安全驾驶。 3、机械工作状态能量信息论;机械工作过程能量损失论;机械工作过程节能效益论。 曲柄压力机动力机容量的选择,根据压力机负载而确定的有效能+系统广义储能+系统损耗能的综合,在乘以安全系数,便是动力机容量。 4、典型闭环控制系统有哪些基本环节组成?各有什么作用? 答:给定环节、测量环节、比较环节、校正及放大环节和执行环节。 给定环节是给出与反馈信号同样形式和因次的控制信号。 测量环节用于测量被控变量,并将被控变量转换为便于传送和便于处理的另一物理量的环节。 比较环节是将来自给定环节的输入信号与测量环节发出的有关被控变量的反馈信号进行比较的环节。 校正及放大环节将偏差信号做必要的校正,并进行放大以便推动执行环节。 执行环节接受放大的控制信号,驱动被控对象按照预期的规律运行的环节。
机电一体化系统设计习题汇总 第一章:概论 1.关于机电一体化的涵义,虽然有多种解释,但都有一个共同点。这个共同点是什么? 2.机电一体化突出的特点是什么?重要的实质是什么? 3.为什么说微电子技术不能单独在机械领域内获得更大的经济效益? 4.机电—体化对我国机械工业的发展有何重要意义? 5.试列举20种常见的机电一体化产品。 6.试分析CNC机床和工业机器人的基本结构要素,并与人体五大要素进行对比,指出各自的特点。 7.机电一体化产品各基本结构要素及所涉及的技术的发展方向。 8.机电一体化设计与传统设计的主要区别是什么? 9.试举例说明常见的、分别属于开发性设计、适应性设计和变异性设计的情况。 10.为什么产品功能越多,操作性越差?为何产品应向“傻瓜化”方向发展? 11.试结合产品的一般性设计原则,分析和理解按“有限寿命”设计产品的目的和意义。 第二章:机械系统设计 1. 机电一体化产品对机械系统的要求有哪些? 2. 机电一体化机械系统由哪几部分机构组成,对各部分的要求是什么? 3. 常用的传动机构有哪些,各有何特点? 4. 齿轮传动机构为何要消除齿侧间隙? 5. 滚珠丝杠副轴向间隙对传动有何影响?采用什么方法消除它? 6. 滚珠丝杠副的支承对传动有何影响?支承形式有哪些类型?各有何特点? 7. 试设计某数控机床工作台进给用滚珠丝杠副。己知平均工作载荷F=4000N,丝杠工作长度l=2m,平均转速=120r/min,每天开机6h,每年300个工作日,要求工作8年以上,丝杠材料为CrwMn钢,滚道硬度为58—62HRC,丝杠传动精度为±0.04mm。 8.导向机构的作用是什么?滑动导轨、滚动导轨各有何特点? 9.请根据以下条件选择汉江机床厂的HJG—D系列滚动直线导轨。作用在滑座上的载荷F=18000N,滑座数M=4,单向行程长度L=0.8m,每分钟往返次数为3,工作温度不超过120℃,工作速度为40m/min,工作时间要求10000h以上,滚道表面硬度取60HRC。 10.滚动直线导轨的形式有哪些?各有何特点? 11. 塑料导轨的特点是什么?常用的塑料导轨有哪些?如何使用? 第三章:接口设计 1.试述机电—体化接口设计的重要性。 2.试述机电一体化产品接口的分类方法。 3. 试述人机接口的作用和特点。 4.人机接口中,常用的输入设备有哪几种?常用的输出设备有哪几种? 5.设计键盘输入程序时应考虑哪几项功能? 6.七段发光二极管显示器的动态工作方式和静态工作方式各具有什么优缺点? 7. 在进行PP40打印机接口设计时,可否直接将STB连到WR上?为什么? 8.试述机电接口的作用和特点。 9. 在机电接口的控制输出接口中,常用的电力电子器件有哪些? 10.在机电接口中,光电耦合器的作用是什么?
交通信控制仿真系统开 发 WEIHUA system office room 【WEIHUA 16H-WEIHUA WEIHUA8Q8-
摘要 随着我国经济的增长,人民的生活越来越好。汽车作为一种代步工具,得到了许多人的青睐,很多人都买了车,这直接导致了城市的交通压力剧增,城市道路经常会出现交通堵塞的情况。交通事故的频发时刻在提醒着我们需要一个更加智能的交通控制系统。随着计算机的普及,各行各业在日常的生产中依赖于计算机的情况越来越普遍。智能交通也有了一席之地,利用计算机技术来控制交通逐渐演变成了新型的交通控制方式。在一个交通控制方案正式投入使用之前,需要对其可行性进行精准的可行性分析。否则,如果这个方案有错误,将会直接带来巨大的经济损失,以及对人民的生命安全带来巨大的威胁。在这样的前提下,智能交通控制系统的仿真就应运而生了。智能交通仿真可以在无真人参与的情况下,实际模拟出交通运行的真实情况,极大的方便了交通控制方案的可行性的检验,并且可以节省许多成本。 【关键词】交通压力计算机交通控制仿真 Abstract With the development of China’s economy, people’s life becomes better and better. As a tool of transportation, vehicles are becoming more and more popular .Many people in our country have cars which directly cause the dramatic increase of the traffic pressure and many traffic jams in our city every day. Many traffic accidents remind us that we need a more intelligent traffic control system. With the popularity of computers, relying on using computers in our diverse daily productions will be more and more pervasive. Intelligent transportation also can play
(此文档为word格式,下载后您可任意编辑修改!) PROTEUS —单片机系统设计与仿真软件 一、Proteus 6.7 Professional 界面简介 安装完Proteus后,运行ISIS 6.7 Professional,会出现以下窗口界面: 为了方便介绍,分别对窗口内各部分进行中文说明(见上图)。下面简单 介绍各部分的功能: 1.原理图编辑窗口(The Editing Window ):顾名思义,它是用来绘制原理图的。蓝色方框内为可编辑区,元件要放到它里面。注意,这个窗口是没有滚动条的,你可用预览窗口来改变原理图的可视范围。 2.预览窗口(The Overview Window ):它可显示两个内容,一个是:当你 在元件列表中选择一个元件时,它会显示该元件的预览图;另一个是,当你的鼠标焦点落在原理图编辑窗口时(即放置元件到原理图编辑窗口后或在原理图编辑窗口
中点击鼠标后),它会显示整张原理图的缩略图,并会显示一个绿色的方框,绿色 的方框里面的内容就是当前原理图窗口中显示的内容,因此,你可用鼠标在它上面点击来改变绿色的方框的位置,从而改变原理图的可视范围。 3.模型选择工具栏( Mode Selector Toolbar ):主要模型( Main Modes ): 1*选择元件(components)(默认选择的) 2* 放置连接点 3* 放置标签(用总线时会用到) 4* 放置文本 5* 用于绘制总线 6* 用于放置子电路 7* 用于即时编辑元件参数 (先单击该图标再单击要修改的元件) 配件( Gadgets): 1*终端接口( terminals):有VCC、地、输出、输入等接口 2* 器件引脚:用于绘制各种引脚 3* 仿真图表( gra ph ) :用于各种分析,如Noise Analysis 4* 录音机 5* 信号发生器( generators) 6* 电压探针:使用仿真图表时要用到 7* 电流探针:使用仿真图表时要用到 8* 虚拟仪表:有示波器等 2D 图形( 2D Graphics): 1* 画各种直线 2* 画各种方框 3* 画各种圆 4* 画各种圆弧 5* 画各种多边形 6* 画各种文本 7* 画符号 8* 画原点等 4.元件列表( The Object Selector ):用于挑选元件( components)、终端接口 ( terminals)、信号发生器 (generators)、仿真图表(graph)等。举例,当你选择"元件 (components)”,单击"P”按钮会打开挑选元件对话框,选择了一个元件后(单击了“ OK ”后),该元件会在元件列表中显示,以后要用到该元件时,只需在元件列表中选择即可。 5.方向工具栏( Orientation Toolbar ):旋转:旋转角度只能是90 的整数倍。 翻转:完成水平翻转和垂直翻转。使用方法:先右键单击元件,再点击(左击)相应的旋
TG n ASR ACR U * n + - U n U i U * i + - U c TA V M + - U d I d UPE L - M T 1、实验目的 1.熟悉晶闸管直流调速系统的组成及其基本原理。 2.掌握晶闸管直流调速系统参数及反馈环节测定方法。 3.掌握调节器的工程设计及仿真方法。 2、实验内容 1.调节器的工程设计 2.仿真模型建立 3.系统仿真分析 3、实验要求 用电机参数建立相应仿真模型进行仿真 4、双闭环直流调速系统组成及工作原理 晶闸管直流调速系统由三相调压器,晶闸管整流调速装置,平波电抗器,电动机—发电机组等组成。 本实验中,整流装置的主电路为三相桥式电路,控制回路可直接由给定电压U ct 作为触发器的移相控制电压,改变U ct 的大小即可改变控制角,从而获得可调的直流电压和转速,以满足实验要求。 为了实现转速和电流两种负反馈分别起作用,可在系统中设置两个调节器,分别调节转速和电流,即分别引入转速负反馈和电流负反馈,二者之间实行嵌套联接,如图。把转速调节器的输出当作电流调节器的输入,再用电流的输出去控制电力电子变换器UPE 。在结构上,电流环作为内环,转速环作为外环,形成了转速、电流双闭环调速系统。为了获得良好的静、动态特性,转速和电流两个调节器采用PI 调节器。 图 转速、电流双闭环调速系统 5、电机参数及设计要求 电机参数 直流电动机:220V ,136A ,1460r/min ,= ? min/r ,允许过载倍数=,晶闸管装置放大系数:=40 电枢回路总电阻:R= 时间常数:=, = 电流反馈系数:=A 转速反馈系数:= V ? min/r
1系统的概念与特性:系统是由具有特定功能的,彼此间具有有机联系的许多要素所构成的一个整体。特性:整体性,相关性,环境适应性,目的性,优化原则。 2工业控制微机系统的基本要求:a具有完善的输入/输出过程,b具有实时控制功能,c具有高可靠性,d具有较强的环境适应性及抗干扰能力,e具有丰富的软件。 3机械系统方案评价基本原则:客观性,可比性,合理性,整体性。采用专家评审集体讨论的方法,有:名次计分法,评分法,技术经济评价法,模糊评价法。将系统的总收益与总投资之比作为主要评价值。 4机械系统设计的基本思想:在机械系统设计时不应追求局部最优,而应该追求整体的最优。5机械系统总体设计的主要内容:a系统原理方案的构思,b结构方案设计,c总体布局与环境设计,d主要参数及技术指标的确定,e总体方案的评价与决策。 6形态学矩阵的概念:在形态学中,将各子系统的目标(功能)及基本可能实现的方法列入一个矩阵形式的表中,这个表就是形态学矩阵,亦称模幅箱图。 7简述六点定位规则:运用适当分布的与工件接触的六个支承点来限制工件六个自由度的规则。 8夹紧装置的组成:力源装置,夹紧机构(中间传力机构,夹紧元件)。 9夹紧装置的基本要求:夹紧过程可靠,夹紧力大小适当,结构性好,使用性好。 10三相异步电机固有机械特性:在额定电压和额定频率下,用规定的接线方法,定子和转子电路中不串联任何电阻或电抗时的机械特性;人为机械特性:当固有机械特性不能满足工作机械要求时,常采用改变电动机某些参数以改变其机械特性的方法,所获得的机械特性称为。 11简述传动系统的组成:变速装置,启停与换向装置,制动装置,安全保护装置。 12物料流系统的基本概念:机械系统工作过程中的运动变化过程。地位:物料流系统的设计非常重要,机械系统的设计就是围绕着物料流展开的,物料流系统决定了机械系统设计的总体布置,物料流系统决定了能量流系统的主要参数,物料流系统是信息流系统的主要控制对象。 13物料流系统的组成:加工,输送,存储,检验. 14常用的微位移机构:柔性支承微工作台,尺蠖机构,蠕动直线马达,X-Y-Z-θ三自由度微动台。驱动单元:微型电动机,压电式维驱动器,微型发动机。 15微位移机电系统基本要求:a灵敏度高,最小位移量达到使用要求;b传动灵敏、平稳。无空行程,制动后能保持稳定位置;c抗干扰能力强,响应快;d结构工艺性好。 16试简述尺蠖机构的组成及前进运动的控制:由三个压电陶瓷串联形成。只要按一定的频率顺序在三个压电晶体上加压,就可以使器件在轴上做步步移动,改变三个压电陶瓷所加的压电频率就可以获得不同的移动速度。 17机械系统设计的一般过程:产品规划(任务书,调研,可行性研究,开发计划),系统技术设计(总体,技术,工作图,鉴定和评审),制造销售(样机试制及样机实验,样机鉴定和评审改进设计,小批试制,定型设计,销售)。 18工作循环图:在机械设备中,各执行机构的运动往往是周期性的,执行机构在经过一段时间间隔后,其位移运动等参数周期性重复,即完成一个个工作循环,工作循环图反应系统中各执行机构在一个周期的工作时间是以怎样的顺序对产品进行加工的。 19执行系统的功能:夹持,搬运,分度与定位,检测,加载。 总体布置的基本原则:运动学原则,基面合一原则,最短传动链原则,保证安全性原则,简单化原则。 总体布置的基本形式:按主要工作机构的空间几何位置:平面式,空间式等;按主要工作机
系统是指具有特定功能的,相互间具有有机联系的诸多要素组成的一个整体 机械系统:由若干机械要素组成,彼此间有机联系完成特定功能。 1系统的特性:1 目的性2 整体性3相关性4环境适应性。 2系统的组成:1动力系统2传动系统3执行系统4控制系统5支承系统. 3系统的6个原理:1整体性原理2结构性3开发性4动态性5层次性6目的性 4机械系统的基本要求:1功能要求2性能要求3可靠性要求4工作效率5适应性6经济性7寿命要求5系统的一般设计过程:市场需求-产品策划-产品设计-产品制造-产品销售-产品运行-产品报废与回收 6机械系统设计的前沿设计:模块化设计,协同设计,绿色设计,虚拟设计,动态设计 7设计类型:开发设计,适应性设计,变异设计 8总体设计的原则:1需求原则2信息原则3系统原则4简单原则 9总体设计的内容:1原理方案设计2确定参数3总体结构设计4分析与评价 10工业技术系统处理对象:能量物料信息 11待设计系统的功能:变换传递保存 功能元:是指能够直接从技术效应和逻辑关系中找到可以满足功能要求的最小单位,是产品功能的基本单位,是产品功能分析的基本单元(物理功能元,数学功能元,逻辑功能元) 12总体布置的基本要求:1功能要求2性能要求3结构要求4工艺要求5使用要求 13主要技术参数的确定:1尺寸参数2 运动参数3 动力参数 14创新技法:类比创新法,组合创新法,头脑风暴法,TRIZ法 15方案评价的方法:加权评价法价值工程评价法模糊评价法(单因素,多因素) 传动系统的功能:1实现从动力源到执行件的升降速功能2实现执行件的变速功能3实现执行件运动形式和运动规律的变化功能4实现对不同执行件的运动分配功能5实现从动力源到执行件的动力转化16传动系统的类型:分级变速传动系统无级变速传动系统定比传动系统 17传动系统的组成:变速装置启停和换向装置制动装置安全保护装置 18扩大传动系统的变速范围1 增加传动组2采用分支传动3采用背轮机构4采用混合公比 19系统结构设计的原则:1从内到外2从主到此3从局部到整体4从粗略到详细 20执行系统的功能:1传递和输出所需要的运动2传递和输出所需要的动力3实现运动形式和运动规律的变换4完成预定的辅助功能 21执行系统的组成:1执行末端件:执行系统中直接完成工作任务的零部件完成一定动作 2执行机构:驱动执行构件,传递变换运动和动力以满足执行构件要求 22箱体轴线布置:1 平面布置2三角布置3轴线互相重合布置 23支撑件的静刚度:1自身刚度2局部刚度3接触刚度 24支撑件的截面形状:1 圆形截面扭转惯性炬较大矩形截面弯曲惯性矩较大2空心截面可以增大惯性矩3封闭结构的惯性矩比未封闭的大 25支承件的结构:1隔板2加强筋3窗孔4连接结构 26设计支撑件时在满足使用要求的前提下应尽量便于铸造焊接加工和装配 27提高支承件动态性能的措施:1提高支撑件的静刚度2增加支撑件的阻尼 28转速图的拟定原则:1前多后少2 前密后疏3 “升2降4”原则4 前慢后快 超速现象:当一条传动路线工作时,在另一条不工作的传动路线上传动件出现高速空转的现象。危害:加剧齿轮和离合器磨损及噪声,增大空载损失 29载荷的确定方法:1 类比法2实测法3计算法
摘要 随着我国经济的增长,人民的生活越来越好。汽车作为一种代步工具,得到了许多人的青睐,很多人都买了车,这直接导致了城市的交通压力剧增,城市道路经常会出现交通堵塞的情况。交通事故的频发时刻在提醒着我们需要一个更加智能的交通控制系统。随着计算机的普及,各行各业在日常的生产中依赖于计算机的情况越来越普遍。智能交通也有了一席之地,利用计算机技术来控制交通逐渐演变成了新型的交通控制方式。在一个交通控制方案正式投入使用之前,需要对其可行性进行精准的可行性分析。否则,如果这个方案有错误,将会直接带来巨大的经济损失,以及对人民的生命安全带来巨大的威胁。在这样的前提下,智能交通控制系统的仿真就应运而生了。智能交通仿真可以在无真人参与的情况下,实际模拟出交通运行的真实情况,极大的方便了交通控制方案的可行性的检验,并且可以节省许多成本。 【关键词】交通压力计算机交通控制仿真
Abstract With the development of China’s economy, people’s life becomes better and better. As a tool of transportation, vehicles are becoming more and more popular .Many people in our country have cars which directly cause the dramatic increase of the traffic pressure and many traffic jams in our city every day. Many traffic accidents remind us that we need a more intelligent traffic control system. With the popularity of computers, relying on using computers in our diverse daily productions will be more and more pervasive. Intelligent transportation also can play a role in using the technology of computer to control the transportation which is becoming a new way to control the traffic. Before a new traffic solution is putting into reality using, we need to do lots of analysis about its feasibility whereas if this solution is not correct, it will bring us a huge economic lose and at the same time it is a big threat to people’s life.In this condition, the simulation system of traffic has being come up with. The simulation system of traffic can really simulate the traffic operation without the participation of human beings which is not only very convenient to test the feasibility of the controlling traffic solution but also can save lots of the cost . 【keywords】traffic pressure computer control simulation
(此文档为word格式,下载后您可任意编辑修改!) PROTEUS —单片机系统设计与仿真软件 一、Proteus 6.7 Professional 界面简介 安装完Proteus 后,运行ISIS 6.7 Professional,会出现以下窗口界面: 为了方便介绍,分别对窗口内各部分进行中文说明(见上图)。下面简单 介绍各部分的功能: 1.原理图编辑窗口(The Editing Window):顾名思义,它是用来绘制原理 图的。蓝色方框内为可编辑区,元件要放到它里面。注意,这个窗口是没有滚动条的,你可用预览窗口来改变原理图的可视范围。 2.预览窗口(The Overview Window):它可显示两个内容,一个是:当你 在元件列表中选择一个元件时,它会显示该元件的预览图;另一个是,当你的鼠标焦点落在原理图编辑窗口时(即放置元件到原理图编辑窗口后或在原理图编辑窗口中点击鼠标后),它会显示整张原理图的缩略图,并会显示一个绿色的方框,绿色
的方框里面的内容就是当前原理图窗口中显示的内容,因此,你可用鼠标在它上面点击来改变绿色的方框的位置,从而改变原理图的可视范围。 3.模型选择工具栏(Mode Selector Toolbar): 主要模型(Main Modes): 1* 选择元件(components)(默认选择的) 2* 放置连接点 3* 放置标签(用总线时会用到) 4* 放置文本 5* 用于绘制总线 6* 用于放置子电路 7* 用于即时编辑元件参数(先单击该图标再单击要修改的元件) 配件(Gadgets): 1* 终端接口(terminals):有VCC、地、输出、输入等接口 2* 器件引脚:用于绘制各种引脚 3* 仿真图表(graph):用于各种分析,如Noise Analysis 4* 录音机 5* 信号发生器(generators) 6* 电压探针:使用仿真图表时要用到 7* 电流探针:使用仿真图表时要用到 8* 虚拟仪表:有示波器等 2D图形(2D Graphics): 1* 画各种直线 2* 画各种方框 3* 画各种圆 4* 画各种圆弧 5* 画各种多边形 6* 画各种文本 7* 画符号 8* 画原点等 4.元件列表(The Object Selector): 用于挑选元件(components)、终端接口(terminals)、信号发生器(generators)、仿真图表(graph)等。举例,当你选择“元件(components)”,单击“P”按钮会打开挑选元件对话框,选择了一个元 件后(单击了“OK”后),该元件会在元件列表中显示,以后要用到该 元件时,只需在元件列表中选择即可。 5.方向工具栏(Orientation Toolbar):
仿真测试系统 系统概述 FireBlade系统仿真测试平台基于用户实用角度,能够辅助进行系统方案验证、调试环境构建、子系统联调联试、设计验证及测试,推进了半实物仿真的理论应用,并提出了虚拟设备这一具有优秀实践性的设计思想,在航电领域获得了广泛关注和好评 由于仿真技术本身具备一定的验证功能,因此与现有的测试技术有相当的可交融性。在航电设备的研制和测试过程中,都必须有仿真技术的支持:利用仿真技术,可根据系统设计方案快速构建系统原型,进行设计方案的验证;利用仿真验证成果,可在系统开发阶段进行产品调试;通过仿真功能,还可对与系统开发进度不一致的子系统进行模拟测试等。 针对航电设备产品结构和研制周期的特殊性,需要建立可以兼顾系统方案验证、调试环境构建、子系统联调联试、设计验证及测试的系统仿真平台。即以半实物仿真为基础,综合系统验证、系统测试、设备调试和快速原型等多种功能的硬件平台和软件环境。 目前,众多研发单位都在思索着如何应对航电设备研制工作日益复杂的情况。如何采取高效的工程技术手段,来保证系统验证的正确性和有效性,是航电设备系统工程的重要研究内容之一,FireBlade 系统仿真测试平台正是在这种大环境下应运而生的。 在航电设备研制工程中的定位设备可被认为是航电设备研制工程中的终端输出,其质量的高低直接关系到整个航电设备系统工程目标能否实现。在传统的系统验证过程中,地面综合测试是主要的验证手段,然而,它首先要求必须完成所有分系统的研制总装,才能进行综合测试。如果能够结合面向设备的仿真手段,则可以解决因部分设备未赶上研发进度导致综合测试时间延长的问题。在以往的开发周期中,面向设备的仿真技术并没有真正得到重视: (1)仿真技术的应用主要集中在单个测试对象上,并且缺乏对对象共性的重用; (2)仿真技术缺乏对复杂环境与测试对象的模拟; (3)仿真技术的应用缺乏系统性,比如各个阶段中仿真应用成果没有实现共享,
阅读使人充实,会谈使人敏捷,写作使人精确。——培根 控制系统设计与仿真上机实验报告 学院:自动化学院 班级:自动化 姓名: 学号: 法拉兹·日·阿卜——学问是异常珍贵的东西,从任何源泉吸收都不可耻。. 阅读使人充实,会谈使人敏捷,写作使人精确。——培根 一、第一次上机任务 1、熟悉matlab软件的运行环境,包括命令窗体,workspace等,熟悉绘图命令。 2、采用四阶龙格库塔法求如下二阶系统的在幅值为1脉宽为1刺激
下响应的数值解。 2?,??n10?0.5,??(s)G n22?????2ss nn3、采用四阶龙格库塔法求高阶系统阶单位跃响应曲线的数值解。 2?,,??5T?n100.5,???Gs)( n22???1)?s(?2s)(Ts?nn4、自学OED45指令用法,并求解题2中二阶系统的单位阶跃响应。 程序代码如下: 法拉兹·日·阿卜——学问是异常珍贵的东西,从任何源泉吸收都不可耻。. 阅读使人充实,会谈使人敏捷,写作使人精确。——培根
;曲线如下: 法拉兹·日·阿卜——学问是异常珍贵的东西,从任何源泉吸收都不可耻。.阅读使人充实,会谈使人敏捷,写作使人精确。——培根
法拉兹·日·阿卜——学问是异常珍贵的东西,从任何源泉吸收都不可耻。.阅读使人充实,会谈使人敏捷,写作使人精确。——培根
法拉兹·日·阿卜——学问是异常珍贵的东西,从任何源泉吸收都不可耻。. 阅读使人充实,会谈使人敏捷,写作使人精确。——培根 二、第二次上机任务 试用simulink方法解微分方程,并封装模块,输出为。得到各、1x i 状态变量的时间序列,以及相平面上的吸引子。 ?x?x??xx?3121? ??xx?x???322 ??xx?xx??x??32321参数入口为的值以及的初值。(其中,以及??????x28?10,?8/,,3,?i1模块输入是输出量的微分。)初值分别为提示:0.001xxx?0,?0,?312s:Simulink
文档来源为 :从网络收集整理 .word 版本可编辑 .欢迎下载支持 . 考试科目 : 机械系统设计 考试时间 :110 分钟 试卷总分 100 分 考试班级 :机械 05 级 一、选择填空(本大题共 10 小题,每小题 1 分,总计 10 分) 装 1.机械工程学科由( )和机械制造两部分组成。 A. 机械原理 B. 机械零件 C. 机械学 D. 机械加工 班 2.人们对机械系统进行功能原理设计时常采用的一种“抽象化”方法是( )。 级 A. 黑箱法 B. 白箱法 C. 类比法 D. 头脑风暴法 : 3.机械系统结构总体设计的任务是( )。 A. 进行原理设计的构思 B. 进行功能原理设计 C. 将原理设计结构化 D. 确定总体参数 学 4.在传动系统中,基本组的级比指数( )。 A. 小于 1 B.等于 1 C.大于 1 D. 任意数 号 : 5.双联滑移齿轮占用的最小轴向尺寸应不小于( )。 订 A. 3 倍齿宽 B. 4 倍齿宽 C. 5 倍齿宽 D. 6 倍齿宽 6.执行系统是由执行末端件和与之相连的( )组成。 A. 运动机构 B. 导向机构 C. 定位机构 D. 执行机构 7.预紧可以有效提高滚动轴承的( )。 A. 承载能力 B. 工作转速 C. 精度 D. 刚度 8.我们可以用镶条来调整( )的间隙。 姓 A. 三角形导轨 B. 燕尾形导轨 C. 车床主轴 D. 铣床主轴 名 9.支承系统是机械系统中具有支承和( )作用的子系统。 : A. 连接 B. 导向 C. 定位 D. 夹紧 线 10. 隔板的布置方向应与载荷的方向( )。 A. 平行 B. 垂直 C. 倾斜 D. 任意 二、名词解释(本大题共 5 小题,每小题 2 分,总计 10 分) 1.机械系统 2.功能原理设计 3.级比 4.执行系统 5.自身刚度 三、简答题(本大题共 6 小题,每小题 4 分,总计 24 分) 1.机械系统设计有哪些基本原则? 2.什么是功能元?有那些种基本功能元? 3.扩大传动系统变速范围有哪些方法? 4.导轨有何功用?滑动导轨按其运动性质可分为哪几种类型? 5.什么是支承件的接触刚度?提高接触刚度有哪些有效措施? 6.常用的典型控制系统有哪几种类型? 四、填空题(本大题含 2 小题共 8 个空,每空 2 分,总计 16 分) 1.某台数控机床, 主轴最高转速为 4000r/min ,最低转速为 30r/min ,计算转速为 145r/min 。 拟选用交流调频主轴电动机,其最高转速和额定转速分别为 4500r/min 和 1500r/min ,则 主轴的恒功率调速范围 R np 为( φu ),电动机的恒功率调速范围 r p 为( ) r/min ,如果有级变速机构的公比 p Z 为( )级。 =R ,则有级变速机构的级数 2.某卧式滑动导轨,支承导轨长 720mm ,动导轨长 360mm ,计算开式导轨的判别依据
机械系统设计总结 1.机械是机构和机器的统称。机械零件是组成机械系统的基本要素。人与机器组成了生产中的最基本单元。 2.系统是指具有特定功能的相互间具有有机联系的若干个要素所组成的一个整体。 3.系统可以分为两种:流系统(柔性连接),结合系统(刚性连接)。 4.机械系统的定义:任何机械都是由若干装置部件和零件组成的一个特定系统,是一个由确定的质量刚度和阻尼的物体组成的,彼此有机联系的,并能完成特定功能的系统。 5.机械系统的组成:动力系统传动系统执行系统操作控制系统框架支承结构系统润滑系统等子系统组成。机械零件是组成机械系统的基本要素。 6.内部系统:机械本身构成的系统外部系统:人和环境构成的系统 7.现代机械系统:由计算机信息网络协调与控制用于完成包括机械力运动和能量流等动力学任务的机械和(或)机电部件相互联系的系统。 8.从系统类型来看,机械系统本身通常为结合系统。 9.机械系统特性:集合性整体性相关性目的性环境适应性。 10.整体性是系统所具有的最重要和最基本的特性。 11.动力系统包括动力机及其配套装置,是机械系统工作的动力源。按能量转换 性质的不同,动力机可分为一次动力机和二次动力机。一次动力机是把自然界的能源转变为机械能的机械,如内燃机汽轮机水轮机等。二次动力机是把二次能源(如电能液能气能)转变为机械能的机械,如电动机液压马达气动马达等。动力机输出的运动通常为转动,而且转速高。 12.选择动力机时,应全面考虑执行系统的运动和工作载荷机械系统的使用环境和工况工作载荷的机械特性等要求,使系统既有良好的动态性能,又有较好的经济性。 13.执行系统包括机械的执行机构和执行构件,是利用机械能来改变作业对象的性质状态形状和位置,或对作业对象进行检测度量等,以进行生产或达到其他预定要求的装置,根据不同的功能要求,各种机械的执行系统也不同,而且对运动和工作载荷的机械特性要求也不同。