
软件学报ISSN 1000-9825, CODEN RUXUEW E-mail: jos@https://www.doczj.com/doc/542026160.html,
Journal of Software,2013,24(6):1243?1262 [doi: 10.3724/SP.J.1001.2013.04320] https://www.doczj.com/doc/542026160.html,
+86-10-62562563 ?中国科学院软件研究所版权所有. Tel/Fax:
?
面向路网的不确定移动范围查询技术
谷峪, 郭娜, 于戈
(东北大学信息科学与工程学院,辽宁沈阳 110819)
通讯作者: 谷峪, E-mail: guyu@https://www.doczj.com/doc/542026160.html,
摘要: 随着移动定位技术和物联网技术的不断发展,时空查询技术受到了广泛关注.在实际的应用中,对象的移
动方向和轨迹常受到空间网络限制并且位置信息往往带有不确定性.在以一般性的概率分布函数形式表示位置的
不确定性的基础上,提出一种基于分割区间的概率查询增量处理模型和查询优化方法.考虑采用概率分布近似中心
作为目标对象的估计位置,近似地解决普遍位置不确定性的问题,以较小的精度损失换取效率上的极大提高.最后,
采用真实的路网数据集和模拟的对象分布,验证了模型和算法在效率和准确性方面均表现突出.
关键词: 路网空间;不确定;移动范围查询;分割区间;概率
中图法分类号: TP311文献标识码: A
中文引用格式: 谷峪,郭娜,于戈.面向路网的不确定移动范围查询技术.软件学报,2013,24(6):1243?1262.https://www.doczj.com/doc/542026160.html,.
cn/1000-9825/4320.htm
英文引用格式: Gu Y, Guo N, Yu G. Uncertain moving range query techniques in road networks. Ruan Jian Xue Bao/ Journal of
Software, 2013,24(6):1243?1262 (in Chinese).https://www.doczj.com/doc/542026160.html,/1000-9825/4320.htm
Uncertain Moving Range Query Techniques in Road Networks
GU Yu, GUO Na, YU Ge
(School of Information Science and Engineering, Northeastern University, Shenyang 110819, China)
Corresponding author: GU Yu, E-mail: guyu@https://www.doczj.com/doc/542026160.html,
Abstract: With the continuous development of the mobile positioning technology and the Internet, spatio-temporal query processing has
drawn more and more attention. In the real situation, the directions and trajectories of mobile objects are usually restricted by an
underlying spatial network, and the position information is usually uncertain. Based on the general probability distribution function (PDF)
used to represent the uncertainty of the positions, incremental processing model and optimization methods for probabilistic query based on
split intervals are proposed. By taking the probability distribution approximate center as the estimated position of the target objects, the
general position uncertainty problem is solved and the efficiency is improved with a minor cost of accuracy. Finally, based on the real-life
road network dataset and synthetic object distribution, the accuracy and efficiency of the proposed models and algorithms are verified.
Key words: road network; uncertain; moving range query; split interval; probability
随着无线通信技术、移动定位技术和物联网的不断发展,移动设备可以广泛应用在智能交通系统、自助旅
游服务、数字化战场等应用中,提供各类基于位置的服务(LBS).由于时空信息数据量大,如何高速度低代价地处
理时空查询,一直是时空数据管理领域的一个研究热点.在实际的情况下,铁路、公路、水运航线等空间网络环
境限定了对象只能沿着预先设定的方向和路线移动.特别地,连续的范围查询(也称移动范围查询)是较常见的
查询类型之一.具体地,网络环境下的移动范围查询定义为:查询点q沿着预先定义的路径移动,在每个查询周
期,从位置已知且固定的对象集合O中找出与q的距离小于查询半径r的对象子集.需要说明的是,虽然查询点
?基金项目: 国家自然科学基金(61003058, 61033007); 国家重点基础研究发展计划(973)(2012CB316201); 中央高校基本科研
业务费专项资金(N110404006, N100704001)
收稿时间:2010-08-11; 修改时间: 2012-04-17; 定稿时间: 2012-09-12
1244 Journal of Software 软件学报 V ol.24, No.6, June 2013
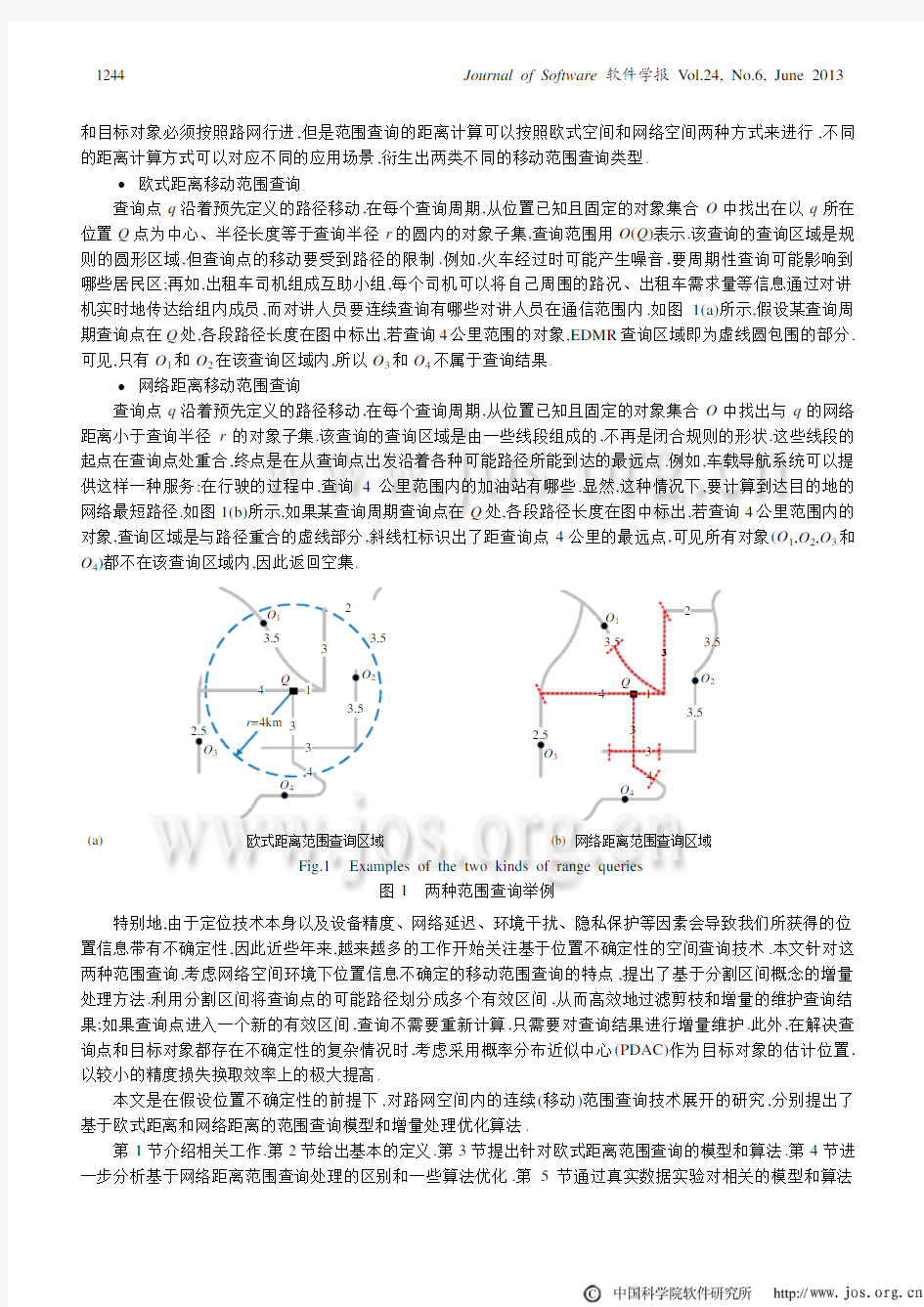
和目标对象必须按照路网行进,但是范围查询的距离计算可以按照欧式空间和网络空间两种方式来进行,不同的距离计算方式可以对应不同的应用场景,衍生出两类不同的移动范围查询类型.
? 欧式距离移动范围查询
查询点q 沿着预先定义的路径移动,在每个查询周期,从位置已知且固定的对象集合O 中找出在以q 所在位置Q 点为中心、半径长度等于查询半径r 的圆内的对象子集,查询范围用O (Q )表示.该查询的查询区域是规则的圆形区域,但查询点的移动要受到路径的限制.例如,火车经过时可能产生噪音,要周期性查询可能影响到哪些居民区;再如,出租车司机组成互助小组,每个司机可以将自己周围的路况、出租车需求量等信息通过对讲机实时地传达给组内成员,而对讲人员要连续查询有哪些对讲人员在通信范围内.如图1(a)所示,假设某查询周期查询点在Q 处,各段路径长度在图中标出,若查询4公里范围的对象,EDMR 查询区域即为虚线圆包围的部分.可见,只有O 1和O 2在该查询区域内,所以O 3和O 4不属于查询结果.
? 网络距离移动范围查询
查询点q 沿着预先定义的路径移动,在每个查询周期,从位置已知且固定的对象集合O 中找出与q 的网络距离小于查询半径r 的对象子集.该查询的查询区域是由一些线段组成的,不再是闭合规则的形状.这些线段的起点在查询点处重合,终点是在从查询点出发沿着各种可能路径所能到达的最远点.例如,车载导航系统可以提供这样一种服务:在行驶的过程中,查询4公里范围内的加油站有哪些.显然,这种情况下,要计算到达目的地的网络最短路径.如图1(b)所示,如果某查询周期查询点在Q 处,各段路径长度在图中标出,若查询4公里范围内的对象,查询区域是与路径重合的虚线部分,斜线杠标识出了距查询点4公里的最远点,可见所有对象(O 1,O 2,O 3和O 4)都不在该查询区域内,因此返回空集.
2.52
O 3
O 4
3.5r =4km O 13.5O 2
34
Q
1
3.5
3
34
(a) 欧式距离范围查询区域 (b) 网络距离范围查询区域
Fig.1 Examples of the two kinds of range queries
图1 两种范围查询举例
特别地,由于定位技术本身以及设备精度、网络延迟、环境干扰、隐私保护等因素会导致我们所获得的位置信息带有不确定性,因此近些年来,越来越多的工作开始关注基于位置不确定性的空间查询技术.本文针对这两种范围查询,考虑网络空间环境下位置信息不确定的移动范围查询的特点,提出了基于分割区间概念的增量处理方法.利用分割区间将查询点的可能路径划分成多个有效区间,从而高效地过滤剪枝和增量的维护查询结果;如果查询点进入一个新的有效区间,查询不需要重新计算,只需要对查询结果进行增量维护.此外,在解决查询点和目标对象都存在不确定性的复杂情况时,考虑采用概率分布近似中心(PDAC)作为目标对象的估计位置,以较小的精度损失换取效率上的极大提高.
本文是在假设位置不确定性的前提下,对路网空间内的连续(移动)范围查询技术展开的研究,分别提出了基于欧式距离和网络距离的范围查询模型和增量处理优化算法.
第1节介绍相关工作.第2节给出基本的定义.第3节提出针对欧式距离范围查询的模型和算法.第4节进一步分析基于网络距离范围查询处理的区别和一些算法优化.第5节通过真实数据实验对相关的模型和算法
2.53
2
3.534
3.5
34
1
O 1O 2
O 3
O 4
Q
3.5
谷峪 等:面向路网的不确定移动范围查询技术 1245
进行评估.最后一节总结全文.
1 相关工作
针对路网的空间查询处理技术得到了越来越多的关注,例如:文献[1]提出了一种基于Voronoi 图的路网分割方法,该方法可以潜在地支持路网上的连续k NN 查询;Cho 等人[2]针对移动对象上路网空间内的最近邻查询和连续最近邻查询提出一种高效的可扩展的算法,将预计算的最近邻列表与Dijkstra 算法相结合;文献[3]针对前期算法无法兼顾效率和存储的缺点,提出了对网络拓扑进行索引的网络压缩技术,将网络简化为互连的树形结构,并对其建立索引;Liu 等人[4]讨论了空间网络环境下的动态范围查询,并给出了优化方法.以上工作都假设位置信息是确定的.
近年来,越来越多的工作在假设对象位置不确定的前提下研究各类空间查询.文献[5]研究了移动对象上基于不确定模型的概率范围查询的处理算法,用一种概率的形式表示对象可能的运动模型.考虑到大量对象可能带来非常高的计算代价,将不确定运动模型映射到二维空间以进行索引,然后用一种近似的方法决定最终结果. Kriegel 等人[6]研究了如何处理不确定对象的概率最近邻问题.Trajcevski 等人[7]讨论了基于不确定移动轨迹的连续最近邻查询的情况.Cheng 等人在文献[8,9]中分别讨论了不确定数据上的限制最近邻和阈值最近邻查询问题的概率处理算法.此外,Huang 等人在文献[10]中考虑了速度不确定的移动对象上的连续k 最近邻查询算法.文献[11,12]在不确定数据上的反最近邻查询方面作出了贡献.Trajcevski 等人[13]较早地研究了移动对象数据库中的不确定性问题,并提供了移动对象不确定性的一种概率模型,将轨迹用统一的随机过程向量形式表示,并高效地支持各类静态的时空范围查询.以上这些假设位置不确定的工作主要是针对欧式空间开展的,相关的技术无法直接应用到路网空间下的移动范围查询场景.
此外,有一些工作考虑由于低采样导致的轨迹不连续,通过推演来填补可能的中间位置.例如,在Zheng 等人的工作中[14],针对这种轨迹不确定性,对路网上的概率范围查询技术展开了深入的研究,并提出了一种新的索引方法.此外,有一些工作还关注了网络拓扑本身具有的不确定性.作为代表,文献[15]考虑了路网环境下的基于网络边权重不确定假设下的空间查询问题.需要说明的是,这些轨迹不确定性和网络拓扑不确定性与本文考虑的由于隐私保护和探测精度造成的位置不确定性有着不同的语义、模型和应用背景.
2 基本定义
表示位置的不确定性信息有很多方式,最具一般性的方法是给出目标可能出现的位置范围S ,以及出现在S 中对应位置可能性的概率密度函数(PDF)f (s ).例如,出于隐私保护的目的,对于某一个体的位置信息只能透露在某个方形区域内,其在该区域内的任何一点的可能性相等;再如,GPS 定位技术只能每隔一段时间周期地报告目标位置,如果一个移动的机器人在上一次报告中的位置是(x ,y ),那么在下一个周期之前的位置可以根据机器人速度变化区间[v max ,v min ]确定到某个范围.需要注意的是,在路网环境下,位置分布只能在路径上,因此需要用一维的PDF 表示带不确定性的位置信息.
定义1(可能位置区域(probable location region )). 在路网环境中,一个对象o i 可能的位置分布区域是由一条或多条连续的路段组成,用PLR i 表示.对象o i 的真实位置可能且仅可能是PLR i 内的任何一点.用PLR [j ]可以访问到第j 个段(任意顺序),|PLR [j ]|表示第j 段长度.简写为PLR.
定义2(可能位置分布(probable location distribution )).一个对象o i 可能的位置分布是由PLR i 中的段和对应段上PDF 组成的二元组集合,可以形式化地表示为
(,)
1
1
[,],()()d 1,1,j j j n j n d s e i j j eid j j j j j PLD s e p x P P p x x j n ==???
?
=??=
=
=?????
?
∑∑∫≤≤≤≤
其中,[s j ,e j ]表示边e eid 上的以s j 为起点、以e j 为终点的路段;p j (x )表示在该段上的概率密度函数;x 取值范围是[0,d (s j ,e j )],表示距s j 的距离;需要满足在所有路段上的概率分布之和为1.简写为PLD.
定义3(可能位置区域边缘点(edge point )). 可能位置区域边缘点是PLR 中的最外点,是进入或者离开PLR
1246 Journal of Software 软件学报 V ol.24, No.6, June 2013
的必经点.边缘点集合可定义为{s j }∪{e j }?S ′,其中,S ′表示任意两个路段[s j ,e j ]eid 存在端点重合的那些端点集合.PLR 可以用.EP 的运算符形式获得其边缘点集合.
PLR 的边缘点可能多于两个,如图2所示,sn 1和sn 2附近的q .PLR 有两个边缘点,sn 3附近的q .PLR 有4个边缘点{EP 5,EP 6,EP 7,EP 8},sn 4附近的q .PLR 有3个边缘点{EP 9,EP 10,EP 11}.
Fig.2 Illustration of PLR
图2 PLR 示例
位置的不确定性必然造成某些目标对象不能确定是否在查询范围内(可能在,可能不在),在查询处理过程中,我们用二元组?o i ,p i ?表示中间结果,表示o i 在查询范围内的概率为p i ,当p i 取不同值时,有如下的不同意义:
0, (01), .1, i i i i o p o o ρρ??
=<
一定不在查询范围内可能在查询范围内一定在查询范围内
那么,根据不同的距离计算方法来确定查询范围,定义两种常用的基于不确定位置的移动范围查询.设d E 和d N 分别表示取欧式距离和网络距离:
定义4(概率网络距离移动范围查询(probabilistic network distance moving range query ,简称NDMR )).
给定概率阈值θ,查询点q 在路网中移动,在每个查询周期,从对象集合O 中找出{o i |o i ∈O ,P (d N (q ,o i )≤r )≥θ}作为查询结果.
定义5(概率欧式距离移动范围查询(probabilistic euclidean distance moving range query ,简称EDMR )).
给定概率阈值θ,查询点q 在路网中移动,在每个查询周期,从对象集合O 中找出{o i |o i ∈O ,P (d E (q ,o i )≤r )≥θ}作为查询结果.
3 欧式距离范围查询不确定性处理
在某些应用中,查询点和目标对象的位置不确定性不是同时存在的.例如,某些服务提供商希望得到最大的经济效益,会尽可能地让顾客知道其详细地址,而顾客要考虑自己的安全问题、确保正常生活不被打扰,会要求位置信息隐私保护,那么这时只有查询点存在位置不确定性;再比如在紧急情况下,查询者查询某些私人地址(要求保证隐私安全)需要尽可能准确的位置信息,所以不考虑自己的隐私问题,那么这时只有目标对象存在位置不确定性.下面我们先分别考虑查询点和目标对象的位置不确定性,再考虑同时存在时的复杂情况. 3.1 查询点位置不确定性处理
对于连续的查询,避免每个周期都重新计算查询结果,本文提出了一种增量处理方法:利用将查询点的可能路径划分成多个有效区间,即空间网络中的一个连续段,只要查询点在有效区间内,其查询结果保持不变;如果查询点进入一个新的有效区间,查询不需要重新计算,只需要对查询结果进行增量维护.在介绍算法之前,先给出一些关键的定义.
342
23
4
25
222sn 1
sn 3sn 4sn 2
o i C
B
E
F
A
D
1
EP 1EP 2EP 3
EP 4EP 7
EP 8
EP 5EP 6EP 11
EP 9
EP 10
谷峪 等:面向路网的不确定移动范围查询技术 1247
定义6(分割点(split node )). 若给定查询半径,分割点是路网图中位于边或顶点上的一个标志性位置,其位
置是根据目标对象的位置计算得出的,如果查询点经过这个位置,那么该查询的结果就可能发生改变.用sn 表示分割点,函数o (sn )返回该分割点的关联对象,即可能影响查询结果的对象.
定义7(有效区间(valid interval )). 对于查询q 的分割点集合SN ,在查询点可能的查询路线上的每对相邻分
割点sn i 和sn j (sn i ,sn j ∈SN )之间的的路段区间[sn i ,sn j ]都是该q 的有效区间,在每个这样的区间内q 的查询结果保持不变.
根据查询点在经过分割点时与该分割点关联对象距离的变化情况,将分割点分为极大值分割点、极小值分割点、非极值分割点这3类.极值分割点是一种不会影响查询结果的分割点.若查询点从某分割点出发沿着各个方向移动,与目标点的最短路径距离都增大,这样的分割点为极小值分割点;反之,若查询点从某分割点出发沿着各个方向移动,与目标点的最短路径距离都减小,这样的分割点为极大值分割点;既不是极大值分割点也不是极小值分割点的分割点为非极值分割点.例如在图3中,空心圆点表示顶点,实心圆点表示分割点,实心方形点为o i 所在的位置.若此时查询半径为5km,根据分割点的定义,可以找出关于o i 的5个分割点sn 5,sn 6,sn 7, sn 8和sn 9.若查询点从sn 5和sn 7出发沿着各个方向移动,与o i 的最短路径距离都增大,为极小值分割点;若查询点从sn 6出发沿着各个方向移动,与o i 的最短路径距离都减小,因此为极大值分割点;而sn 8和sn 9没有极值分割点的特性,是非极值分割点.
Fig.3 Examples of the extreme points in EDMR
图3 EDMR 查询的极值点示例
每个分割点需要存储一些必要的信息,所以分布在边上的分割点表示为四元组esn (oid ,flag ,direction ↓, position ),分布在顶点处的分割点表示为四元组vsn (oid ,flag ,set ↓,set ↑,position ),其中,oid 表示该分割点所关联的对象标识id,flag 表示该点是否是极值点(0:不是极值点;?1:是极小值点;1:是极大值点),direction ↓指出d (q ,o oid )减小的方向(从vl 到vr 或者从vr 到vl ,分别用表示vl →vr 和vr →vl 表示),set ↓和set ↑分别是d (q ,o oid )减小和增大方向的相邻顶点集合,position 用来存储相对位置信息.
目标对象的位置是准确的,那么可以用几何方法得到分割点集合.SN oid 是关联o oid 的分割点,q .PLR 表示查询点q 可能的位置分布区域,SN oid Θq .PLR 表示SN oid 在q .PLR 中的分割点集,函数Num(SN oid ΘPLR q )返回SN oid Θq .PLR 中元素个数.根据Num(SN oid Θq .PLR ),分4种情况进行处理:
情况1. Num(SN oid Θq .PLR )=0
此类情况不能确定o oid 是否在查询范围内,但是能确定如果在则概率一定为1,否则一定不在(p oid =0).需要根据在本周期以前和上一周期之后经过了哪些分割点以及上一周期p oid >0的q 点位置集分布情况来判断.在两周期之间经过的极值分割点不影响查询结果,但会给出重要提示信息,关联同一对象的分割点中最后经过的是起决定作用的分割点,用dsn 表示.对于极小值分割点,如果q 在他们周围(不存在其他关联相同对象o i 的分割点的范围)的任何一个位置,都会有d (q ,o i )>r 成立;对于极大值分割点,如果q 在他们周围的任何一个位置,都会有d (q ,o i ) 3434 3.555 2.5 5 sn 9 sn 5 sn 8 sn 6 o i C B F E A D 2 2.5 sn 75km H G 1248 Journal of Software 软件学报 V ol.24, No.6, June 2013 Table 1 Existence probability judgements for Num(SN oid Θq .PLR )=0 表1 Num(SN oid Θq .PLR )=0时的存在概率判定表 情况2. Num(SN oid Θq .PLR )=1,设sn ∈SN oid Θq .PLR ,且sn ΘE 当sn .flag =?1时,o oid 直接产生中间结果?o oid ,0?.因为sn 是极小值点,那么,对于q .PLR 上任意一点q i 都有d (q i ,o oid )≥r 成立,则o oid 一定不在查询范围内.当sn .flag =0时,则o oid 可能在查询范围内,需要计算其存在概率p 值.因为sn 不是极值点,那么对于PLR 上任意一个与sn 不重合的点q i :若与sn .set ↓中的点在sn 的同侧,则有d (q i ,o oid ) 111(,)(,) 1(,) 02 ()()d ()d .m m i i m i n d s e d s e oid m i d s sn i m p o p x x p x x ++++=+=+ ∑∫ ∫≤ 特别地,当q 在PLR 内的位置在内均匀分布时,o oid 存在概率等于q .PLR 在o oid 的作用区间内的部分所占长 度的百分比,即211 |||[]| |[]| m m n e sn PLR i p PLR i +++=∑∑. (a) q ΘE (b) q ΘV Fig.4 Examples of the location uncertainty in query point 图4 查询点位置不确定性的例子 情况3. Num(SN oid Θq .PLR )=1,设sn ∈SN oid Θq .PLR ,且sn ΘV 当sn .flag =1时,o oid 直接产生中间结果?o oid ,1?.因为sn 是极大值点,那么对于q .PLR 上任意一点q i 都有d (q i ,o oid )≤r 成立,则o oid 一定在查询范围内.当sn .flag =?1时,o oid 直接产生中间结果?o oid ,0?.因为sn 是极小值点,那么对于q .PLR 上任意一点q i 都有d (q i ,o oid )≥r 成立,则o oid 一定不在查询范围内.当sn .flag =0时,则o oid 可能在查询范围内,需要计算其存在概率p 值.因为sn 不是极值点,那么对于q .PLR 上任意一个与sn 不重合的点q i :若与sn .set ↓中的点在sn 的同侧,则有d (q i ,o oid ) sn PLR [m +2] PLR [m +3] PLR [n ] PLR [m ]PLR [2] PLR [1] PLR [m +1] e m +1 s m +1 sn PLR [m +2] PLR [n ] PLR [m ] PLR [2]PLR [1] PLR [m +1] 谷峪 等:面向路网的不确定移动范围查询技术 1249 段为PLR [m +1…n ],则(,) 01 (())()d i i i n d s e i i m p o sn p x x =+= ∑∫≤.特别地,当q 的位置在PLR 内均匀分布时,o oid 的存在概率等 于q .PLR 在o oid 的作用区间内的部分长度百分比,1 1|[]||[]| m n n PLR i p PLR i += ∑∑. 情况4. Num(SN oid Θq .PLR )>1,设极值点集合为ESN oid : 若Num(SN oid Θq .PLR ?ESN oid )=1且sn ΘE ,则忽略ESN oid ,用情况2的方法处理; 若Num(SN oid Θq .PLR ?ESN oid )=1且sn ΘV ,则忽略ESN oid ,用情况3的方法处理; 若Num(SN oid Θq .PLR ?ESN oid )>1,在集合(SN oid Θq .PLR ?ESN oid )∪q .PLR .EP 中,找出满足下列条件的二元组?α,β?集合: 1) α,β可以是单个的分割点或边缘点,也可以是由多个分割点或边缘点组成的向量; 2) α和β之间包含的区域必须是连续的路段,不包含其他分割点; 3) α和β中是分割点的元素,其direction ↓的方向指向对方. 这样确定出的区间是对象o oid 可能成为查询结果(p oid >0)的q 点位置集,那么p oid 的值就是q 点在该位置集中的概率和,即各段的分布概率积分之和. 3.2 目标对象位置不确定性处理 目标对象的位置带有不确定性,同样需要用PLD 代替点坐标来表示.在基于精确位置的处理算法中,一个核心的组成部分——分割点位置的确定是根据可能在查询范围内的对象的位置以及查询半径确定出来的,由于目标对象精确的位置信息是一个点,所以确定出来的每个与其相关联的分割点位置也是一个点.那么用PLD 确定出来的分割点位置形式也会发生变化. 定义8(分割区间(split interval )). 分隔区间即分割点可能的位置分布情况,根据所关联的对象PLD,确定分 割点的PLD. NDMR 查询的距离计算方式是沿着路径延伸的,所以NDMR 查询分割区间的计算可以看做是关联对象的PLD 沿着路径的逻辑平移和叠加(在下一节中详细讨论).而EDMR 查询的距离计算方式在空间中是自由的,与NDMR 查询的方法不同,需要更复杂的过程. 3.2.1 确定PLR o i 可能的作用范围是以o i .PLR 中的每个点为圆心、查询半径r 的长度为半径所构造出的所有圆覆盖的范围.按照对象o i 的PLR 是否跨顶点的性质分为两种情况: 1) 若o i .PLR 在同一条边上,则可能的作用范围取极限的位置有2个,即圆心的位置与边缘点重合,如图5(a)所示,可能的作用范围形状是由两个半圆和夹在中间的一个矩形组合而成; 2) 若o i .PLR 跨过某个顶点,那么极限位置(影响最终覆盖范围的位置)有2个或以上,圆心的位置与边缘点或者拐点重合,如图5(b)所示,可能的作用范围的形状是由多个情况1)中的形状带重叠的组合. 定义9(可能作用范围的最大/最小边界(maximal /minimal boundary of active region )). 一定处于o i 作用 范围内的点集合是极限位置处的可能作用范围的重叠区域min R ,min R 的边界是可能作用范围的最小边界(min-boundary).所有可能处于o i 作用范围内的点的集合是o i .PLR 中任何一个位置处的作用范围所覆盖的区域max R , max R 的边界是可能作用范围的最大边界(max-boundary). 如图5所示虚线标识的闭合曲线中处于外部的为Max-Boundary,处于内部的为Min-Boundary.可以看出,可能作用区域中每个点的概率等于多个圆形区域的概率在此点上的叠加,颜色越深表示概率密度越大. 1250 Journal of Software 软件学报 V ol.24, No.6, June 2013 (a) o i .PLR 不跨顶点 (b) o i .PLR 跨顶点 Fig.5 Split interval examples 图5 分割区间示例 根据分割区间对查询结果的影响程度将分割区间分为两类: 1) 确定性的分割区间,分别以可能作用范围的Max-Boundary 和Min-Boundary 与路网图中边的交点为边缘点的连续区间; 2) 非确定性的分割区间,以可能作用范围的Max-Boundary 与路网图中边的交点为边缘点的连续区间. 每个对象的分割区间要存储必要的信息,可以形式化表示为四元组的形式si (oid ,flag ,direction ↓/dp ,PLD ). 其中, ? oid 表示该分割区间所关联的对象标识id; ? flag 表示该点是否为确定性分割区间(0:否;1:是); ? flag =0,direction ↓指出d (q ,o oid )减小的方向(从一个边缘点指向另一个边缘点),具有唯一性;若flag =1,此项存储进入和离开的分割点分界点dp ; ? PLD 用来存储位置分布信息,每个分割区间可能包含多个段,用PLD ={?[s i ,e i ],p i (x )?|1≤i ≤n }来表示. 3.2.2 确定PDF 若查询周期即当前时刻q 不在o i 的任何分割区间内时,需要回顾周期间经过的分割区间.确定性的分割区间在增量维护过程中会对结果产生影响,若为q 最新经过的关联对象的分割区间,与其direction ↓相同则将关联的对象插入到结果集中,与其direction ↓相反从结果集中删除.非确定性分割区间没有方向性,完全经过的情况下不影响查询结果,但会给出重要提示信息. 若查询周期q 处于o i 的某个分割区间内时,o i 的存在概率计算需要基于分割区间的PDF.下面讨论如何确定分割区间的PDF. (1) 关联对象的PLR 不跨顶点时,确定性分割区间的PDF 确定. 若分割点在确定性分割区间内的某点v 处,设决定该分割点的作用范围是O i ,O i 的圆心在o i .PLR 内的位置可以确定出来,即与v 点的距离等于查询半径的点(如图6(a)所示)是一一对应的,那么分割点在v 点的概率等于o i 在O i 的圆心处的概率.可见,两个PDF 的变化趋势是完全相同的,但是变化区间的长度不等,而且PDF 是与距边缘点的距离成正比的,所以只需将变化参数的值域扩大或缩小相应倍数即可,如图6(a)所示. 1112221|.|.{[,],()},.[,],,|.|i i si PLR o PLD s e p x si PLD s e p x o PLR ????? ?=??=??? ?????? ? 而si 3的积分区间端点顺序与o i 的相反: 3221331|.||.|.[,],,[,],1.|.||.|i i si PLR si PLR si PLD s e p x s e p x o PLR o PLR ??????? ?=?????? ???????? ? si 2 2 谷峪 等:面向路网的不确定移动范围查询技术 1251 (2) 关联对象的PLR 跨顶点时,确定性分割区间的PDF 确定. o i .PLD 含有两个段[s 1,m 1]和[m 1,e 1],设以m 1点为圆心、r 为半径的圆与si 2的交点为m 2.设o i 在o i .PLR 的[s 1,m 1]([m 1,e 1])区间内的某点u 1(v 1)处的作用范围与si 2.PLD 的交点为u 2(v 2),那么u 2(v 2)一定在si 2.PLD 的区间[s 2,m 2]([m 2,e 2])上.那么分割点在u 2(v 2)点的概率等于o i 在u 1(v 1)处的概率.由于si 1是确定性分割区间,所以仍然有一一对应的的性质:变化趋势是完全相同的,变化区间长度不等.如图6(b)所示,o i .PLD 含有两个段,对应段内的两个PDF 的变化趋势相同,那么si 2.PLD 也分两段,只需将对应段的PDF 变化参数的值域扩大或缩小相应倍数.若o i .PLD ={?[s 1,m 1],p 1(x )?,?[m 1,e 1],p 2(x )?},则 2221222|.[1]||.[2]|.[,],,[,],.|.[1]||.[2]|i i si PLR si PLR si PLD s m p x m e p x o PLR o PLR ???? ???? =?????? ??????? ? (a) o i .PLR 不跨顶点 (b) o i .PLR 跨顶点 Fig.6 Confirmation process of PDF for the determined split interval 图6 确定性分割区间的PDF 确定过程 对于任意一个对象o i ,其非确定性分割区间内总能找到这样一点M 或区间I :它的两边分别分布的是进入和离开o i 作用区间的分割点的可能位置.该点或区间不一定是分割区间的中点(或区间仅在分割区间与o i .PLR 平行或垂直时在中心位置),其位置与o i .PLR 的夹角有关.由于非确定性分割区间仅是Max-Boundary 与路网图中边的交点,与Min-Boundary 不相交,所以o i .PLR 内可能会存在一部分位置的o i 作用范围O i 与该分割区间无交点.分界位置N 可能是当O i 与分割区间的切点(唯一交点)为M 时O i 的圆心位置.以N 点为界,距离分割区间较近一侧的所有位置参与构成分割区间.对于跨顶点的分割区间,关联对象在一个段上可能不会影响整个分割区间,影响区域间隔区间为I .下面将详细距离说明. (3) 关联对象的PLR 不跨顶点时,非确定性分割区间的PDF 确定. 如图7(a)所示,o i .PLD 中以m 1和m 3为圆心、r 为半径的圆与si 2和si 3分别相切于m 2和m 4.若分割点在区间[s 2,m 2]([m 2,e 2])内的任意一点v 处,设决定该分割点的作用范围是O i ,O i 的圆心在o i .PLR 内的位置可以确定出来(在区间[s 1,m 1]内),即与v 点的距离等于查询半径的点.由于连续分布所以是一一对应的,那么分割点在v 点的概率等于o i 在O i 圆心处的概率.同理,只需将变化参数的值域扩大或缩小相应倍数.若o i .PLD ={?[s 1,e 1],p 1(x )?}: 1111222122122223131334113431133443|,||,|.[,],,[,],1,|,||,||,||,|.[,],1(|,|),[,],(|,|).|,||,|s m s m si PLD s m p x m e p x s m m e m e m e si PLD s m p x s m m e p x s m s m m e ??????? ? =??????????? ??????? ? ??????? ? =?++????????????????? ? (4) 关联对象的PLR 跨顶点时,非确定性分割区间的PDF 确定. 与步骤(2)相似,对于跨顶点的非确定性分割区间需要分段进行分析.o i .PLD 含有两个段[s 1,m 1]和[m 1,e 1],设以m 1点为圆心、r 为半径的圆O 1与si 3的交点为m 3,以s 1点为圆心、r 为半径的圆O 2与si 3的交点为m 4.si 3的 si 1 si 2si 4si 3 s 2s 1 e 1e 2e 3s 3o i .PLR si 1 si 2 si 3s 2e 2s 1 m 1e 1u 1 v 1u 2 v 2m 2 o i .PLR 1252 Journal of Software 软件学报 V ol.24, No.6, June 2013 边缘点为与O 1和O 2构成的Max-Boundary 的交点,所以如图7(b)所示,若o i 若分布在[s 1,m 1],那么分割点可能的 位置区间为[s 2,m 3]和[m 4,e 2].若?[s 1,m 1],p 1(x )?∈o i .PLD ,则[s 2,m 3]和[m 4,e 2]上的关于o i 分布于[s 1,m 1]内的si 3.PLD 分 别为23123|.[1]|[,],|,|i o PLR s m p x s m ?????? ?? 和42242|.[1]|[,],|,|i o PLR m e p x m e ?? ??????.若o i 若分布在[m 1,e 1],那么分割点可能的位置区 间为[m 3,e 2].以m 2为圆心、以r 为半径的圆与si 3相切于m 5,若?[m 1,e 1],p 2(x )?∈o i .PLD ,则关于o i 分布于[m 1,e 1]内 的33515223552|.[2]||.[2]|.[,],[,],1|,||,|i i o PLR o PLR si PLD m m p x m e p x m m m e ??????? ? =??????????? ???????? ,.将o i 分布于o i .PLD 内各段的si 3.PLD 合并,得到最终 32313514522335425222524|.[1]|.[2]|.[1]|.[,],,[,],,[,],,|,||,||,||.[2]||.[1]| [,],1|,||,i i i i i o PLR o PLR o PLR si PLD s m p x m m p x m m p x s m m m m e o PLR o PLR m e p x p m e m ???????? =????????????????????? ???+???? ??422(|,|).|x m e e ???? +????????? (a) o i .PLR 不跨顶点 (b) o i .PLR 跨顶点 Fig.7 Confirmation process of PDF for the uncertain split interval 图7 非确定性分割区间的PDF 确定过程 若已知分割区间的PLD,当查询点在分割区间内分布时,计算关联对象o i 在查询结果中的存在概率分两种情况: ? 情况1. q 在确定性分割区间内 设si .PLD ={?[s 1,e 1],p 1(x )?}:若q 的移动方向与si .direction ↓相同,如图8(a)中的情形(1),o i 在查询结果中的存 在概率111(,)1(,)()()d d s q i d s s p o p x x =∫ ;若q 的移动方向与si .direction ↓相反,如图8(a)中的情形(2),o i 在查询结果中的存在概率111(,) 1(,) ()1()d d s q i d s s p o p x x =?∫ . ? 情况2. q 在非确定性分割区间内 若关联对象的PLR 不跨顶点时,设si .dp =D ,si .PLD ={?[s 1,D ],p 1(x )?,?[D ,e 1],p 2(x )?},q 的移动方向如图8(b)中情 形(1)的箭头标识.当q 在区间[s 1,D ]内某一点u 处,111(,)1(,) ()()d d s u i d s s p o p x x =∫ ;当q 在区间[D ,e 1]内某一点v 处, (,) 2(,) ()1()d .d D v i d D D p o p x x =?∫ 若关联对象的PLR 跨顶点时,设si .dp =D ,si .PLD ={?[s 1,m 1],p 0(x )?,?[m 1,m 2],p 1(x )?,?[m j ,D ],p j (x )?,?[D ,m j +1], p j +1(x )?,?[m n ?1,m n ],p n (x )?},q 的移动方向如图8(b)中情形(2)的箭头标识.当q 在区间[m i ,m i +1](i si 3si 2 s 1o i .PLR e 1s 3s 2e 3 e 2m 1 m 3m 2m 4 si 1 si 2 si 3 o i .PLR s 1e 1s 4 e 4 m 1m 5 m 3 m 4 m 2 谷峪 等:面向路网的不确定移动范围查询技术 1253 111 111(,)(,) (,) 1(,) (,) (,) 1 ()()d ()d ()d .k k i k k i i k i d s m d m m d m u i k i d s s d m m d m m k p o p x x p x x p x x +=?==+ +∑∫ ∫∫ 当q 在区间[m i ,m i +1](i >j )内某一点v 处,1(,) (,) (,) (,) 1 ()1()d ()d i k k i i k k k n d m v d m m i i k d m m d m m k i p o p x x p x x +==+=?+ ∑∫∫. (a) 确定性分割区间 (b) 非确定性分割区间 Fig.8 Computation of o i ’s presence proableiity when q is in the split interval 图8 q 在分割区间内分布时o i 的存在概率计算 3.3 普遍位置不确定性处理 查询点和目标对象的位置都带有不确定信息的情况,我们称为普遍位置不确定性问题.与前两种单独存在的不确定性问题相比,这类问题在对查询结果的增量处理方法方面没有差别,但存在概率的计算较为复杂,要根据查询点的位置区域q .PLR 和分割区间si .PLR 的位置关系分情况进行讨论. 假设q .PLR 和关联目标对象o i 的某个si .PLR 是两条连续的线段[s 1,e 1],[s 2,e 2](为了表述方便,我们用最简单的情况来进行说明,与其他情况的原理相同): 情况1. q .PLR 与si .PLR 相离 此类情况与第3.2节中的情况1属于同一类情况,可以采用相同的处理方法.唯一一点不同是用了“完全经过某个分割区间”替换“经过某一个分割点”的概念,不影响判定流程.这里不再进行重复性表述. 情况2. q .PLR 与si .PLR 交叠 不失一般性,假设s 1和s 2分别是q .PLR 和si .PLR 的距离o i 较近的边缘点,q .PLR 和si .PLR 上的概率分布函数分别为p 1(x )和p 2(x ),那么交叠的部分只能为[s 2,e 1],[s 1,e 2](如图9(a)所示). 1) 若是[s 2,e 1],设点v 是[s 1,e 1]上的一点,那么当v Θ[s 1,s 2]=q .PLR ?si .PLR ,则p i =1;当v Θ[s 2,e 1]=q .PLR ∩si .PLR , 则222(,) 2(,) [1()]d d s v i d s s p p x x =?∫ .那么,o i 的平均存在概率为 {} {}1111121112111222121112111222(,)1(,)(,) (,)(,) 112(,) (,) (,) (,)(,) (,) 112 (,) (,) (,) ()()d ()1d ()[1()]d d ()d ()[1()]d d . d s e i d s s d s s d s e d s s d s s d s s d s s d s s d s e x d s s d s s d s s d s s p p x p x x p x x p x p y y x p x x p x p y y x ?=?=?+? ?=+? ?∫ ∫∫ ∫ ∫∫ ∫ 2) 若是[s 1,e 2],设点v 是[s 1,e 1]上的一点,那么当v Θ[s 1,e 2]=q .PLR ∩si .PLR ,则111(,) 2(,) ()d d s v i d s s p p x x =∫;当v Θ[e 2,e 1]= si .PLR ?q .PLR ,则p i =0.那么,o i 在查询结果中的平均存在概率为 111112211111211212211121(,)1(,) (,)(,)(,)121(,)(,)(,)(,)(,) 12(,)(,)()()d ()()d d ()0d ()()d d . d s e i d s s d s e x d s s d s e d s s d s s d s e d s e x d s s d s s d s s p p x p x x p x p y y x p x x p x p y y x ++=???=?+????? ??=????? ∫ ∫∫∫∫∫ s 1 e 1 s 1e 1 si .PLR si .PLR o i o i (1) (2) q q s 1 e 1 m 1m 2s 1 e 1 m j ...m n m j +1 (1) (2) u v q u v q D D 1254 Journal of Software 软件学报 V ol.24, No.6, June 2013 情况3. q .PLR 包含si .PLR 不失一般性,假设s 1和s 2分别是q .PLR 和si .PLR 的距离o i 较近的边缘点,q .PLR 和si .PLR 上的概率分布函数分别为p 1(x )和p 2(x ),那么,交叠的部分只能为[s 2,e 2](如图9(b)中情形(1)所示). 设点v 是[s 1,e 1]上的一点,那么当v Θ[s 1,s 2],则p i =1;当v Θ[s 2,e 2],则222(,)2(,) [1()]d d s v i d s s p p x x =?∫;当v Θ[e 2,e 1],则p i =0. 那么,o i 在查询结果中的平均存在概率为 {} {} 1111121212111112221212121222(,)1(,)(,) (,)(,) (,) 1121(,)(,) (,) (,) (,(,) 12(,) (,) ()()d ()0d ()[1()]d d ()1d ()[1()]d d d s e i d s s d s s d s e x d s s d s e d s s d s s d s s d s e d s e x d s s d s s d s s p p x p x x p x x p x p y y x p x x p x p y y x ??=?=?+? ?+=? ?∫∫∫∫ ∫ ∫ i 1112) (,)1(,) ()d . d s e d s e p x x +∫ ∫ 情况4. q .PLR 被si .PLR 包含 不失一般性,假设s 1和s 2分别是q .PLR 和si .PLR 的距离o i 较近的边缘点,q .PLR 和si .PLR 上的概率分布函数分别为p 1(x )和p 2(x ),那么交叠的部分只能为[s 1,e 1](如图9(b)中的情形(2)所示). 设点v 是[s 1,e 1]上的一点,则221(,) 2(,) [1()]d d s v i d s s p p x x =?∫ .那么,o i 在结果中的平均存在概率为 {} 111121111122(,)(,)(,) 112(,) (,) (,) ()()d ()[1()]d d .d s e d s e x d s s i d s s d s s d s s p p x p x x p x p y y x ?=?=? ?∫ ∫ ∫ (a) q .PLR 与si .PLR 交叠 (b) q .PLR 包含si .PLR Fig.9 Instances of q .PLR and si .PLR ’s position relationships 图9 q .PLR 与si .PLR 位置关系示例图 4 网络距离范围查询不确定性处理 4.1 网络距离与欧式距离范围查询不确定性处理差异 根据定义4和定义5可以看出,两类查询除了在查询点与目标对象之间的距离计算方法上存在差异,其他特性均相同.所以,同样可以采用基于有效区间划分的增量处理算法来解决网络距离范围查询的不确定性问题. 在查询点和目标对象位置不确定的处理过程中,查询点与目标对象之间的距离计算方法的不同,决定了对于相同的目标对象集合,两类查询会计算出不同的分割点和分割区间集合.对于NDMR,分割点的位置意义是以对象的位置为起点,沿着路径所能到达的最远位置.那么分布在一定位置区间内的对象,能够到达的最远位置一定是以各个方向上区间段的端点为起点出发的,所以采用网络扩展算法确定分割点和分割区间集合. 普遍位置不确定性问题中,目标对象的位置不确定性导致分割区间没有绝对极值的情况,使PEMDR 查询与NDMR 查询的区别更模糊,所以在对查询结果的增量处理的原理和方法方面没有差别,只是在分割区间的计 s 1e 2 s 2e 1e 2 s 2 s 1e 1q .PLR q .PLR si .PLR si .PLR o i o i (1) (2) s 1 e 2 s 2 e 1 q .PLR si .PLR o i (1) s 1e 2 s 2 e 1 q .PLR si .PLR o i (2) 谷峪 等:面向路网的不确定移动范围查询技术 1255 算细节存在差异;对于计算存在概率的公式也相同,根据查询点的PLR 和分割区间的PLR 关系分情况讨论,这里 不再重复说明.关于分割区间的分布计算属于积分计算,而存在概率的计算是基于分割区间的概率分布函数的二重积分.这样,无论是对于目标对象分布区间的存储空间还是目标对象在结果中的存在概率,计算效率上都是一种挑战.可采用近似方法来解决目标对象的位置带有不确定性的问题,以较小的精度损失换取效率上的极大提高. 4.2 普遍位置不确定性问题的处理优化 将目标对象o i 的PLR 用一个点来代替,这类点的位置应该尽量在多数情况下反映对象实际的精确位置,所以应该根据PDF 的取值估计位置.PLR 是由一个或多个连续线段组成,可将其看作是有重量的绳子,PDF 就是相应的质量分布函数,那么其质心点即为满足以上要求的点.PLR 可能含有多个段,两种查询的分布都被限制在路网上,在PLR 内,任意两点之间的距离等价于最短路径距离,所以都要按路径距离找“质心”,忽略他们之间的夹角.而且根据要求,我们要找的这个点必须在路网上而不是无限制的空间内任何位置处一点,所以这种特殊的“质心”不一定存在,我们可以找到一个最接近的点来近似.根据质心的性质,我们给出概率分布近似中心的定义 以及所需的两个基础概念:目标对象PLR 中某个区间的概率分布中心和概率中心距. 定义10(概率分布中心(probability distribution center )). 对于某个?[s j ,e j ],p j ?∈o i .PLD ,在区间[s j ,e j ]内、与s j 的距离为(,) (,)(,) (,) ()d ()d j j j j j j j j d s e j d s s d s e j d s s x p x x d p x x ?= ∫∫的点即为o i 在[s j ,e j ]段的概率分布中心,简写为PDC. 定义11(概率中心矩(probability moments )). 对某个?[s j ,e j ],p j (x )?∈o i .PLD ,假设它的PDC 为点c j 相对于路 网中任意一点v 的概率中心距为(,) (,) (.[],)(,)()d j j j j d s e i j j d s s PM o PLR j v d c v p x x =?∫ ,简写为PM. 定义12(概率分布近似中心(approximative center of probability distribution )). 对于o i .PLD 中某一个点 c ,能够使各段相对于点c 的PM 值之间的差距尽可能小,那么,这个点c 称为o i 的概率分布近似中心,简写为PDAC. 如图10所示: ? 对于情况(1),设o 1.PLD ={?[s 1,e 1],p 1(x )?},只有一个段,那么,o 1在区间[s 1,e 1]上的PDC 就是o 1的PDAC, 即为区间[s 1,e 1]上的与s 1的距离为11111111 (,) 1(,)(,) 1(,)()d ()d d s e d s s d s e d s s x p x x d p x x ?= ∫∫的点; ? 对于情况(2),设o 2.PLD ={?[s 2,m 2],p 1(x )?,?[m 2,e 2],p 2(x )?},有两个段,但是可以看做是一个整体,那么o 2的 PDAC 为区间[s 2,e 2]上的与s 2的距离为111111 11111111 11(,) (,) 122(,) (,) (,) (,)12(,) (,) ()d (|.[1]|)()d ()d ()d d s m d m e d s s d m m d s m d m e d s s d m m x p x x x o PLR p x x d p x x p x x ?++?=+∫∫ ∫∫ 的点; ? 情况(3)和情况(4)的PDAC 不能简单地按照质心的坐标公式求得 O i .PLD ={?[s 2,m ],p 1(x )?,…,?[s n ,m ],p n (x )?,?[m ,e ],p n +1(x )?}(n >1). 根据情况(1)的计算公式,可以求出o i .PLR 中各段上PDC 的集合CS ={c 1,c 2,…,c n +1},与m 的距离分别为d 1,d 2,…,d n +1,所占概率比为p 1,p 2,…,p n +1,则PM (o i .PLR [j ],m )=d j ?p j .设max{d j ?p j |1≤j ≤n +1}=d k ?p k (若k 值多于一个 且概率比相等,则计算其中一个即可;否则,取概率比大者进行计算),依据PDAC 的定义,o i 的PDAC 点c 应该在o i .PLR [k ]上,设c 与m 的距离为x (x >0)的点,应该满足:除第k 段以外的其他段中找到最小x 值的条件,最先达到 其概率中心距PM (o i .PLR [j ],c )(j ≠k )与PM (o i .PLR [k ],c )相等,即 x =min{min(x j )|m j (d j +x j )≤m k |d k ?x j |,1≤j ≤n +1∧j ≠k }. ? 若求出的x ≤|o i .PLR [k ]|,则结果就是o i .PLR [k ]上与m 的距离为x 的c 点,若求出的x 值(相等同为最小)多于1个,则都作为结果保留; 1256 Journal of Software 软件学报 V ol.24, No.6, June 2013 ? 若x >|o i .PLR [k ]|,则c 点的位置与o i .PLR [k ]的边缘点重合. 如图10所示: ? 对于情况(3),设 o 3.PLD ={?[s 13,m 3],0.1?,?[s 23,m 3],0.2?,?[s 33,m 3],0.3?,?[m 3,e 3],0.4?},|o 3.PLR [1]|=2, |o 3.PLR [2]|=2,|o 3.PLR [4]|=2,|o 3.PLR [4]|=4.那么, max{d j ?p j |1≤j ≤4}=max{0.1×1,0.2×1,0.3×1,0.4×2}=max{0.1,0.2,0.3,0.8}=0.8=d 4?p 4 x =min{1.4,1,0.714}=0.714, 则o 3的PDAC 是区间[m 3,e 3]内与m 3距离为0.714的点. ? 对于情况(4),设 o 3.PLD ={?[s 4,m 4],0.2?,?[m 4,e 14],0.4?,?[s 33,m 3],0.3?,?[m 4,e 24],0.4?},|o 3.PLR [1]|=2, |o 4.PLR [2]|=|o 4.PLR [3]|=4.那么,max{d j ?p j |1≤j ≤3}=max{0.2,0.8,0.8}=0.8=d 2?p 2=d 3?p 3,x =min{1}=1,则o 4的PDAC 有两个,是区间[m 4,e 14]和[m 4,e 24]内的与m 4的距离为1的点. Fig.10 Examples of locating PDAC 图10 PDAC 的定位示例 5 实 验 在这节中,我们用实验结果分析本文提出的模型和方法的性能及其有效性.实验的所有算法使用C++语言实现,执行环境是Intel Core 2 Duo2.00 GHz 处理器,2.0GB 内存,120GB SATA 硬盘,Windows XP 操作系统. 5.1 实验设置 实验数据集采用真实路网和模拟的目标对象分布合成的数据集.其中,真实的路网数据集使用的是德国奥尔登堡市(OL)(包括7 034条边、6 104路网节点)和美国加利福尼亚州的圣华金市(TG)(包括23 873条边、18 262路网节点)两个城市的路网拓扑数据,均可以在https://www.doczj.com/doc/542026160.html,/dcw 网站上下载到.目标对象在路网上的位置是根据均匀分布和齐夫分布模拟出来的(如图11(a)、图11(b)所示).我们将路网和目标对象的分布映射到10000×10000的二维空间范围中,并用quadtree 进行索引(如图11(c)、图11(d)所示).我们假定查询点在路网内做匀速运动(单位时间移动5个单位),每次实验中的出发点和路径的选择都是随机的(图11中,连续线段表示查询点的路线).不失一般性,所有参数的值都是根据物理世界的实际情况设置的.实验参数的基本设置总结见表2.在考察每个变量对结果的影响时,其他参数都设置为默认值. (3) (2)(1)(4) s 1 e 1 s 4 e 42 e 41s 33 s 32 e 3 s 2e 2 s 31o 4.PLR o 1.PLR o 2.PLR o 3.PLR m 3m 1 m 2 m 4 谷峪等:面向路网的不确定移动范围查询技术1257 (a) OL对象分布(b) TG对象分布(c) OL索引块划分(d) TG索引块划分Fig.11 Quadtree index and object distribution in real datasets for road networks 图11 真实路网quadtree索引块划分和模拟的对象分布 Table 2Default parameter settings for the experiments 表2实验参数设置 变量取值范围默认值意义 D object Uniform, zipf Uniform 目标对象分布 D edge OL, TG OL 路网分布 R(×1000)0.5, 1, 1.5, 2, 2.5 1 查询半径 N object 100~10000 200 目标对象数量 T5, 10, 15, 20, 25, 30 20 查询周期 L(×1000)5, 10, 15, 20, 25, 30 20 查询点路径长度 Ambig_d(‰) 0.1, 0.2, 0.3, 0.4, 0.5 0.3 模糊度(表示不确定位置的PLR与整个二维空间的边长之比) θ0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.90.7 结果概率阈值 5.2 实验结果分析 每组实验得到的结果数据都是各种算法在相同实验设置下连续执行100次查询得到的平均值,即用每个查询结果的平均响应时间来评估查询效率,用结果的平均准确率来评估查询准确性.准确率包括查全率(recall)和查准率(precision).设根据模糊位置算得的查询结果为ambR,根据精确位置算得的查询结果为accR,则查全 率为ambR中包含的准确结果对象个数占accR结果对象个数的比率|| || ambR accR accR ∩ ,查准率为ambR中包含的 准确结果对象个数占ambR结果对象个数的比率|| || ambR accR ambR ∩ . 由于没有相关工作研究此类问题,我们仅对比扩展后的算法在处理查询点位置不确定性、目标对象位置不确定性、普遍位置不确定性问题的平均响应时间和查询结果的准确率.分别用缩写符号QPLU,QOLU,ULU表示EDMR和NDMR这3类不确定性问题.每类实验中的准确性用查全率和查准率来评估. (1) R的影响 图12显示了当R在区间[0.5×103,2.5×103]内变化时,扩展算法在处理QOLU时平均响应时间和查全率的变化情况.从图12(a)中可以看出,算法的平均响应时间会随着R的增加而增长,增长速度比较缓慢.这是因为扩展的方法采用分割区间代替分割点来构造有效区间,分割区间(PDF)的计算复杂度要高于分割点的计算,因R的增加而包含的新候选目标对象的分割区间的计算是影响平均响应时间的主要因素.从图12(b)中可以看出,扩展算法的查全率会随着R的增加而提高.这是因为处于查询范围边缘的对象才需要用积分计算其存在概率,而处于查询范围较为中心位置的对象的存在概率一定为1,不需要复杂计算.R增加使查询范围变大,那么在其他参数值不变的情况下,存在概率一定为1的目标对象占结果的比例变大,因此查全率会提高.当R在区间[0.5×103, 2.5×103]内变化时,处理NDMR和EDMR的QOLU时准确率都能达到85%以上. 1258 Journal of Software 软件学报 V ol.24, No.6, June 2013 图12 (2) Ambig _d 的影响 图13反映出当Ambig _d 在区间[0.1,0.5]内变化时,扩展算法处理3类不确定性时的平均响应时间和查全率的变化情况.从图13(a)中可以看出,扩展算法处理ULU 的平均响应时间最长,QOLU 的处理要比处理QPLU 更耗时.这是因为扩展的方法处理QPLU 时仍然采用分割点来构造对象的有效区间,而处理QOLU 和ULU 时采用分割区间代替分割点来构造有效区间,分割区间(PDF)的计算复杂度要高于分割点的计算.从图13(b)中可以看出,扩展算法的查全率会随着Ambig _d 的增加而降低.这是因为处于查询范围边缘的对象才需要用积分计算其存在概率,而处于查询范围较为中心位置的对象的存在概率一定为1,不需要复杂计算.Ambig _d 增加使概率变大,那么在其他参数值不变的情况下,存在概率一定为1的目标对象占结果的比例变小,因此查全率会下降. Fig.13 图13 (3) θ的影响 图14反映了当θ在区间[0.3,0.9]内变化时,扩展算法在处理3类不确定性问题时的平均响应时间和查全率的变化情况.从图14(a)中可以看出,扩展算法的平均响应时间不受θ的变化影响.这是因为在搜索分割点时不考虑θ限制,θ条件的过滤是在将所有候选结果对象的存在概率计算之后进行过滤的.从图15(b)中可以看出,扩展算法的查全率会随着θ的增加下降一些.这是因为计算得出的一些真阳性结果的存在概率会小一些,随着θ的增加,会过滤掉一些真阳性结果.当θ取0.7左右时,查全率接近极大值. 3.02.52.01.51.0 0.50.0A v e r a g e r e s p o n t i m e (s )0 5 15253NDMR’s QPLU NDMR’s QOLU NDMR’s ULU NDMR’s QPLU NDMR’s QOLU NDMR’s ULU 1.00.90.80.70.6 R e c a l l .65 .75.85.95 1NDMR’s QPLU NDMR’s QOLU NDMR’s ULU NDMR’s QPLU NDMR’s QOLU NDMR’s ULU 谷峪 等:面向路网的不确定移动范围查询技术 1259 Fig.14 图14 (4) 目标对象分布的影响 图15显示了当N object 在区间[0.5×103,2.5×103]内变化时,扩展算法在处理QOLU 的平均响应时间和查准率的变化情况.从图15(a)和图15(b)中可以看出,扩展算法平均响应时间受查询目标对象分布的影响较小,只显示出较小的波动差别,但是不会影响到总体的对比关系.这是因为齐夫分布中不同位置的查询目标数量差异较大,而每次选择的路线出发点和走向都是随机的,导致响应时间会有波动,N object 越大,波动得越强烈,所以均匀分布的变化曲线较为平滑一些.查准率会随着N object 的增加而体现出微小幅度的提高,这是因为处于查询范围边缘的对象才需要用积分计算其存在概率,而处于查询范围较为中心位置的对象的存在概率一定为1,不需要复杂计算.N object 的增加,使查询范围存在概率一定为1的目标对象增量较多,因此查准率会提高.当R 在区间[0.5×103, 2.5×103]内变化时,处理两种分布下EDMR 的QOLU 时,准确率都能达到85%以上. 图16显示了当N object 在区间[0.5×10,2.5×10]内变化时,扩展算法在处理QOLU 平均响应时间和查准率的变化情况.从图16(a)中可以看出,在其他参数值相同的情况下,处理TG 图的平均响应时间要高于处理OL 图的平均响应时间.由于将两个城市的路网都映射到相同大小的二维空间中,TG 图包含的边和顶点的数量分别大约是OL 图的3倍,所以密度大.查询范围相同的情况下,边和顶点分布密度大的图,其I/O 读数量会较大,并且在搜索和处理分割区间时的工作量也较多.从图16(b)中可以看出,扩展算法的查准率几乎不受路网分布的影响.但由于多次重复性实验为查询点随机选择的不同路线的出发点和走向,而且在OL 和TG 中,不同位置的路的长度和数量差异较大,导致响应时间会有波动.从图11中可以看出,OL 的分布比TG 的分布更均匀一些,所以OL 的曲线较为平滑一些. 3.02.52.01.51.00.5 0.0 A v e r a g e r e s p o n t i m e (s )0515253EDMR’s uniform EDMR’s zipf EDMR’s uniform EDMR’s zipf 1.00.90.80.7 0.6 P r e c i s i o n EDMR’s uniform EDMR’s zipf 1260 Journal of Software 软件学报 V ol.24, No.6, June 2013 图17反映了当目标对象较为密集时,QOLU 平均响应时间和查准率的变化情况.从图17(a)中可以看出,算法的平均响应时间会随着N object 的增加而增长.这是因为分割区间是根据目标对象的位置计算得出的,目标对象越多,分割区间的集合越庞大,每个查询周期需要考虑的增量维护的工作量就会增加,但是没有因查询半径变大所增长的速度快.由于我们的查询是针对满足某种条件的静止目标对象进行连续范围查询,例如周期性查询离目标对象最近的加油站或者宾馆等等,在一般的应用场景中,这类路网地图上的范围很大,即使相关目标对象较多,密度也相对较小.从图17(b)中可以看出,查准率会随着N object 的增加而体现出微小幅度的提高,总体趋于稳定.这是因为处于查询范围边缘的对象才需要用积分计算其存在概率,而处于查询范围较为中心位置的对象的存在概率一定为1,不需要复杂计算.N object 增加使查询范围存在概率一定为1的目标对象增量较多,因此查准率会提高.图17(c)显示了结果中目标对象的数量及其变化.显然,对象结果的数目跟目标对象密度、查询范围和结果概率阈值有关. (PDAC).图18显示了当R 在区间[0.5×103,2.5×103]内变化时,采用PDAC 近似处理算法的平均响应时间和查准 率的变化情况. 6543210A v e r a g e r e s p o n t i m e (s )0123456EDMR NDMR EDMR NDMR 1.00.90.8 0.70.6P r e c i s i o n 8 5951EDMR NDMR EDMR NDMR 300250 200150100500 N r e s u l t 0000000EDMR NDMR EDMR NDMR 谷峪等:面向路网的不确定移动范围查询技术1261 (PDF)的工作简化为搜索分割点的过程,EDMR查询的分割区间计算处理更复杂.从图18(b)、图18(d)中可以看出,采用PDAC近似处理算法会导致查准率有所下降,但是幅度较小.这是因为PDAC是根据目标对象的可能位置分布情况计算出来的,在一定程度上反映了目标对象的真实位置. 综上,算法在分别处理EDMR和NDMR两种概率范围查询的3类不确定性问题时,处理普遍位置不确定性的平均响应时间最长,目标对象位置不确定性的处理要比处理查询点位置不确定性更耗时.当结果阈值θ取0.7左右时,结果的准确率已开始趋于稳定,均能达到80%以上.考察了在解决普遍位置不确定性问题时,采用概率分布近似中心(PDAC)作为目标对象的估计位置方法,在保证了一定的准确性标准的同时,其效率有了明显的提升.通过牺牲较少的准确性换来处理速度的极大提高,这种方法适用于那些对实时性要求较高的应用. 6 结论 本文首先采用最具一般性的一维PDF方法表示路网中的不确定位置信息.然后用分割区间将查询点的可能路径划分成支持增量处理的有效区间,针对EDMR,NDMR这种移动范围概率查询.根据PLR和分割区间的分布特性,分情况讨论目标对象存在概率的计算方法和查询结果的增量维护算法.最后,考虑采用概率分布近似中心(PDAC)作为目标对象的估计位置,近似地解决普遍位置不确定性的问题,以较小的精度损失换取效率上的极大提高.实验结果证明,本文提出的模型和算法具有良好的性能. References: [1] Kolahdouzan M, Shahabi C. Voronoi-Based K nearest neighbor search for spatial network databases. In: Nascimento MA, et al., eds. Proc. of the 30th Int’l Conf. on Very Large Data Bases. Toronto: Morgan Kaufmann Publishers, 2004. 840?851. [2] Cho HJ, Chung CW. An efficient and scalable approach to CNN queries in a road network. In: Bohm K, et al., eds. Proc. of the 31st Int’l Conf. on Very Large Data Basesn. Trondheim: ACM Press, 2005. 865?876. 1262 Journal of Software软件学报 V ol.24, No.6, June 2013 [3] Hu HB, Lee DL, Xu JL. Fast nearest neighbor search on road networks. In: Ioannidis YE, et al., eds. Proc. of the 10th Int’l Conf. on Extending Database Technology. LNCS 2992, Munich: Springer-Verlag, 2006. 186?203. [doi: 10.1007/11687238_14] [4] Liu FY, Do TT, Hua KA. Dynamic range query in spatial network environments. In: Bressan S et al, eds. Proc. of 17th Int’l Conf. of Database and Expert Systems Applications. LNCS 4080, Krakow: Springer-Verlag, 2006. 254?265. [doi: 10.1007/11827405_25] [5] Chung BSE, Lee WC, Chen ALP. Processing probabilistic spatio-temporal range queries over moving objects with uncertainty. In: Kersten ML, et al., eds. Proc. of the 12th Int’l Conf. on Extending Database Technology. Saint-Petersburg: ACM Press, 2009. 60?71. [doi: 10.1145/1516360.1516369] [6] Kriegel HP, Kunath P, Renz M. Probabilistic nearest-neighbor query on uncertain objects. In: Kotagiri Ramamohanarao K, et al., eds. Proc. of 12th Int’l Conf. on Database Systems for Advanced Applications. LNCS 443, Bangkok: Springer-Verlag, 2007. 337?348. [doi: 10.1007/978-3-540-71703-4_30] [7] Trajcevski G, Tamassia R, Ding H, Scheuermann P, Cruz IF. Continuous probabilistic nearest-neighbor queries for uncertain trajectories. In: Kersten ML, et al., eds. Proc. of the 12th Int’l Conf. on Extending Database Technology. Saint-Petersburg: ACM Press, 2009. 874?885. [doi: 10.1145/1516360.1516460] [8] Cheng R, Chen JC, Mokbel M, Chow CY. Probabilistic verifiers: Evaluating constrained nearest-neighbor queries over uncertain data. In: Alonso G, et al., eds. Proc. of the 24th Int’l Conf. on Data Engineering. Cancun: IEEE Computer Society, 2008. 973?982. [doi: 10.1109/ICDE.2008.4497506] [9] Cheng R, Chen L, Chen JC, Xie XK. Evaluating probability threshold k-nearest-neighbor queries over uncertain data. In: Kersten ML, et al., eds. Proc. of the 12th Int’l Conf. on Extending Database Technology. Saint-Petersburg: ACM Press, 2009. 672-683. [doi: 10.1145/1516360.1516438] [10] Huang YK, Chen CC, Lee C. Continuous K-nearest neighbor query for moving objects with uncertain velocity. Geoinformatica, 2009,13(1):1?25. [doi: 10.1007/s10707-007-0041-0] [11] Lian X, Chen L. Efficient processing of probabilistic reverse nearest neighbor queries over uncertain data. VLDB Journal, 2009, 18(3):787?808. [doi: 10.1007/s00778-008-0123-0] [12] Cheema MA, Lin XM, Wang W, Zhang WJ, Pei J. Probabilistic reverse nearest neighbor queries on uncertain data. IEEE Trans. on Knowledge and Data Engineering, 2010,22(4):550?564. [doi: 10.1109/TKDE.2009.108] [13] Trajcevski G, Wolfson O, Hinrichs K, Chamberlain S. Managing uncertainty in moving objects databases. ACM Trans. on Database Systems, 2004,29(3):463?507. [doi: 10.1145/1016028.1016030] [14] Zheng K, Trajcevski G, Zhou XF, Scheuermann P. Probabilistic range queries for uncertain trajectories on road networks. In: Ailamaki A, et al., eds. Proc.of the 14th Int’l Conf. on Extending Database Technology. Uppsala: ACM Press, 2011. 283?294. [doi: 10.1145/1951365.1951400] [15] Hua M, Pei J. Probabilistic path queries in road networks: Traffic uncertainty aware path selection. In: Manolescu I, et al., eds. Proc. of the 13th Int’l Conf. on Extending Database Technology. Lausanne: ACM Press, 2010. 347?358. [doi: 10.1145/1739041. 1739084] 谷峪(1981-),男,辽宁鞍山人,博士,副教授,CCF会员,主要研究领域为空间数据管理,图数据管理. E-mail: guyu@https://www.doczj.com/doc/542026160.html, 于戈(1962-),男,博士,教授,博士生导师,CCF高级会员,主要研究领域为数据库理论与技术. E-mail: yuge@https://www.doczj.com/doc/542026160.html, 郭娜(1985-),女,硕士,主要研究领域为空 间数据管理. E-mail: guona_neu@https://www.doczj.com/doc/542026160.html, 中国移动企业信息化一期工程统一信息平台技术规范 (v1.0) 中国移动通信集团公司 目录1总则1 1.1.概述1 1.2.适用范围1 1.3.起草单位1 1.4.解释权2 2应用体系架构3 2.1.两级架构3 2.2.统一信息平台的组成4 2.3.总体技术要求5 3展示平台6 3.1.域名规则6 3.2.登录流程7 3.3.访问安全控制7 3.3.1.认证8 3.3.2.加密9 3.3.3.授权9 3.4.个性化展现经管9 3.5.内容应用聚集10 3.6.系统性能要求10 4网络和接入平台11 4.1.全国互联广域网组织结构11 4.1.1.全国互联广域网拓扑结构11 4.1.2.广域网互联承载网络的选择12 4.1.3.全国互联广域网的路由13 4.1.4.全国互联广域网的网络安全13 4.2.集团公司统一信息平台的网络组织结构13 4.2.1.集团公司统一信息平台局域网13 4.2.2.集团公司统一信息平台接入15 4.3.省公司统一信息平台的网络组织结构16 4.3.1.省公司统一信息平台局域网16 4.3.2.省公司统一信息平台接入18 4.4.IP地址规划19 4.4.1.IP地址规划原则19 4.4.2.IP地址规划方法20 4.4.3.IP地址规划要求21 5安全经管平台21 5.1.网络经管及网络安全21 5.1.1.网络系统经管21 5.1.2.网络安全22 5.2.系统经管及系统安全23 5.2.1.系统经管23 5.2.2.系统安全24 5.2.3.数据经管和安全25 5.2.4.防病毒26 6系统和环境要求27 6.1.系统要求27 6.1.1.主机设备27 6.1.2.操作系统27 6.1.3.存储备份设备28 6.1.4.网络设备29 6.1.5.数据库31 6.1.6.展示平台软件33 6.1. 7.开发工具34 6.1.8.系统文档34 6.2.机房环境要求35 6.2.1.机房环境条件35 6.2.2.接地要求36 6.2.3.空调及电源36 对移动通信技术的认识 所谓移动通信就是移动体之间的通信,或移动体与固定体之间的通信。移动体可以是人,也可以是汽车、火车、轮船、收音机等在移动状态中的物体。 移动通信与固定物体之间的通信比较起来,具有一系列的特点,主要是:(1)移动性。就是要保持物体在移动状态中的通信,因而它必须是无线通信,或无线通信与有线通信的结合。(2)电波传播条件复杂。因移动体可能在各种环境中运动,电磁波在传播时会产生反射、折射、绕射、多卜勒效应等现象,产生多径干扰、信号传播延迟和展宽等效应。(3)噪声和干扰严重。在城市环境中的汽车火花噪声、各种工业噪声,移动用户之间的互调干扰、邻道干扰、同频干扰等。(4)系统和网络结构复杂。它是一个多用户通信系统和网络,必须使用户之间互不干扰,能协调一致地工作。此外,移动通信系统还应与市话网、卫星通信网、数据网等互连,整个网络结构是很复杂的。(5)要求频带利用率高、设备性能好。 移动通信系统由两部分组成: (1) 空间系统; (2) 地面系统:①卫星移动无线电台和天线;②关口站、基站。 移动通信系统从20世纪80年代诞生以来,到2020年将大体经过5代的发展历程,而且到2010年,将从第3代过渡到第4代(4G)。到4G,除蜂窝电话系统外,宽带无线接入系统、毫米波LAN、智能传输系统(ITS)和同温层平台(HAPS)系统将投入使用。未来几代移动通信系统最明显的趋势是要求高数据速率、高机动性和无缝隙漫游。实现这些要求在技术上将面临更大的挑战。此外,系统性能(如蜂窝规模和传输速率)在很大程度上将取决于频率的高低。考虑到这些技术问题,有的系统将侧重提供高数据速率,有的系统将侧重增强机动性或扩大覆盖范围。 从用户角度看,可以使用的接入技术包括:蜂窝移动无线系统,如3G;无绳系统,如DECT;近距离通信系统,如蓝牙和DECT数据系统;无线局域网(WLAN)系统;固定无线接入或无线本地环系统;卫星系统;广播系统,如DAB和DVB-T;ADSL和Cable Modem。 移动通信的种类繁多。按使用要求和工作场合不同可以分为(1)集群移动通信,也称大区制移动通信。它的特点为只有一个基站,天线高度为几十米至百余米,覆盖半径为30~km,发射机功率可高达200W。用户数约为几十至几百,可以是车载台,也可是以手持台。它们可以与基站通信,也可通过基站与其他移动台及市话用户通信,基站与市站有线网连接。(2)蜂房移动通信,也称小区制移动通信。它的特点是把整个大范围的服务区划分成许多小区,每个小区设置一个基站,负责本小区各个移动台的联络与控制,各个基站通过移动交换中心相互联 移动通信技术参考答案 第一章 思考题与练习题 1-1 什么是移动通信?移动通信有那些特点? 答:移动通信是指通信的双方,或至少一方,能够在移动状态下进行信息传输和交换的一种通信方式。移动通信的特点是通信双方不受时间及空间的限制、随时随地进行有效、可靠、安全的通信。频率 1-2 移动通信系统发展到目前经历了几个阶段?各阶段有什么特点? 答:移动通信系统发展到目前经历了四个阶段,分别为公用汽车电话、第一代通信技术(1G)、第二代通信技术(2G)、第三代通信技术(3G)。特点分别为,公用汽车电话的特点是应用范围小、频率较低、语音质量较差、自动化程度低。第一代通信技术(1G)的特点是该系统采用模拟技术及频分多址技术、频谱利用率低、系统容量小抗干扰能力差、保密性差:制式不统一、互不兼容、难与ISDN兼容、业务种类单一、移动终端复杂、费用较贵。第二代通信技术(2G),采用数字调制技术和时分多址(TDMA)、码分多址技术(CDMA)等技术、多种制式并存、通信标准不统一、无法实现全球漫游、系统带宽有限、数据业务单一、无法实现高速率业务。第三代通信技术(3G)的特点是能提供多种多媒体业务、能适应多种环境、能实现全球漫游、有足够的系统容量等。 1-3 试述移动通信的发展趋势和方向。 答:未来移动通信将呈多网络日趋融合、多种接入技术综合应用、新业务不断推出的发展趋势。移动通信的发展方向是功能一体化的通信服务、方便快捷的移动接入、形式多样的终端设备、自治管理的网络结构。 1-4 移动通信系统的组成如何?试述各部分的作用。 答:移动通信系统的组成主要包括无线收发信机、交换控制设备和移动终端设备。无线收发信机的作用是负责管理网络资源,实现固定网与移动用户之间的连接,传输系统信号和用户信息。交换控制设备的作用是实现用户之间的数据信息交换。移动台的作用是实现移动通信的终端设备。 1-5 常见的移动通信系统有那些?各有何特点? 答:常见的移动通信系统有:1、蜂窝移动通信系统2、无线寻呼系统3、无绳电话系统蜂窝移动通信系统的特点是越区交换、自动和人工漫游、计费及业务统计功能。无线寻呼系统的特点是即可公用也可专用。无绳电话系统的特点是携带使用方便。 1-6 集群移动通信系统的组成有那些? 答:集群移动通信系统的组成有移动台、基站、调度台以及控制中心组成。 1-7 移动通信的工作方式及相互间的区别有那些? 答:移动通信的工作方式有单工制、半双工制、双工制。单工制的优点主要有:1、系统组网方便2、由于收发信机的交替工作,所以不会造成收发之间的反馈3、发信机工作时间相对可缩短,耗电小,设备简单,造价便宜。单工制的的缺点是:1、当收发使用同一频率时,临近电台的工作会造成强干扰2、操作不方便,双方需要轮流通信,会造成通话人为的断断续续3、同频基站间的干扰较大。半双工制的优点主要有:1、设备简单、省电、成本低、维护方便,临近电台干扰小2、收发采用异频,收发频率各占一段,有利于频率协调和配置3、有利于移动台的紧急呼叫。半双工制的缺点是移动台需按键讲话,松键收话。使用不方便,讲话时不能收话,故有丢失信息的可能。双工制的优点有:1、频谱灵活性高2、 中国移动通信企业标准 中国移动业务支撑网 4A 安全技术规范 版本号:1.0.0 中国移动通信有限公司 发布 ╳╳╳╳-╳╳-╳╳发布 ╳╳╳╳-╳╳-╳╳实施 QB-W-016-2007 目录 1概述 (7) 1.1范围 (7) 1.2规范性引用文件 (7) 1.3术语、定义和缩略语 (7) 2综述 (8) 2.1背景和现状分析 (8) 2.24A平台建设目标 (9) 2.34A平台管理范围 (10) 34A管理平台总体框架 (11) 44A管理平台功能要求 (14) 4.1帐号管理 (14) 4.1.1帐号管理的范围 (14) 4.1.2帐号管理的内容 (14) 4.1.3主帐号管理 (14) 4.1.4从帐号管理 (15) 4.1.5密码策略管理 (15) 4.2认证管理 (15) 4.2.1认证管理的范围 (16) 4.2.2认证管理的内容 (16) 4.2.3认证服务的管理 (16) 4.2.4认证枢纽的管理 (16) 4.2.5SSO的管理 (17) 4.2.6认证手段 (17) 4.2.7提供多种手段的组合使用 (17) 4.3授权管理 (17) 4.3.1授权管理的范围 (17) 4.3.2授权管理的内容 (18) 4.3.3资源管理 (18) 4.3.4角色管理 (18) 4.3.5资源授权 (19) 4.4审计管理 (20) 4.4.1审计管理范围 (20) 4.4.2审计信息收集与标准化 (21) 4.4.3审计分析 (21) 4.4.4审计预警 (22) 4.54A管理平台的自管理 (23) 4.5.2权限管理 (23) 4.5.3组件管理 (23) 4.5.4运行管理 (23) 4.5.5备份管理 (23) 4.64A管理平台接口管理 (24) 4.6.1帐号管理接口 (24) 4.6.2认证接口 (24) 4.6.3审计接口 (24) 4.6.4外部管理接口 (25) 54A管理平台技术要求 (25) 5.1总体技术框架 (25) 5.2P ORTAL层技术要求 (27) 5.3应用层技术要求 (27) 5.3.1前台应用层技术要求 (27) 5.3.2核心数据库技术要求 (28) 5.3.3后台服务层技术要求 (30) 5.3.4单点登录技术要求 (32) 5.3.5安全审计技术要求 (33) 5.4接口层技术要求 (35) 5.5非功能性技术要求 (35) 5.5.1业务连续性要求 (35) 5.5.2开放性和可扩展性要求 (38) 5.5.3性能要求 (38) 5.5.4安全性要求 (38) 64A管理平台接口规范 (40) 6.1应用接口技术规范 (40) 6.1.1总体描述 (40) 6.1.2登录类接口(①) (41) 6.1.3认证类接口 (42) 6.1.4帐号/角色接口(④) (43) 6.1.5审计类接口 (48) 6.2系统接口技术规范 (51) 6.2.1总体描述 (51) 6.2.2登录类接口(①) (52) 6.2.3认证类接口 (53) 6.2.4帐号接口(⑤) (55) 6.2.5审计类接口 (59) 6.3外部管理接口技术规范 (61) 7BOSS系统3.0的改造要求 (62) 《移动通信技术》课程标准 一、课程性质 本课程是通信技术专业的一门核心课程,属于职业技术必修课程。这是一门系统性、理论性强的课程,是信号与系统、通信原理的后续课程。本课程主要介绍了各种现代移动通信技术,包括移动通信的发展史、系统的构成、移动通信中的基本技术、GSM移动通信系统、CDMA技术基础及IS-95移动通信系统、3G移动通信系统等。通过本课程的学习,使该专业学生掌握蜂窝移动通信系统的基本工作原理;熟悉现有的GSM系统和CDMA系统;掌握3G技术和未来移动通信系统的技术发展趋势。使学生具有一定的移动通信系统的设计分析、系统设计和网络规划能力。 本课程的先修课程有《电路基础》、《信号与系统》、《高频电子技术》、《光纤通信技术》、《现代通信原理》等。为后续继续学习,实践等课程打下坚实的基础。 二、课程设计思路 1.教学班是主要的教学组织,班级授课制是目前教学的主要组织形式。有条件的话,也可以采用分组教学。或者几种组织方式灵活组合,尽量减轻学生的生理和心理疲劳。有条件的话尽量采用多媒体课室授课。加强实验,实验要分组进行,分组人数不宜过大,实验前多做准备工作。有时间可以多进行一些习题讲解。 2. 注意教学方法的灵活性,组织学生讨论、问题教学、进行解题指导等,尤其是有条件的话,借用多媒体的声像呈示,提供给学生一些有助于理解概念的描述图像,或者是组织学生讨论,培养学生发现问题、分析问题、解决问题的能力和探究意识。 3.充分发挥学生的主动性,努力提高学生学习的积极性,加强学生把理论用于实际的培训,培养学生自主学习、研究科学技术的能力。注意对前置课程的复习与总结,以便前后衔接,巩固与提高。考虑学生的具体情况,可在绪论课后适当复习一些前置课程的基本知识。 4.评价方法要以实现课程标准规定的教学目标为依据,鼓励学生动手实践。 5.该门课程的总学时为56学时,其中理论46学时,实践10学时。 三、课程目标 (一)总体目标 通过本课程的学习,使学生掌握通信系统的基本工作原理;熟悉现有的GSM系统和CDMA系统;掌握现有3G移动通信系统技术和未来移动通信系统的技术发展趋势。使学生具有一定的系统设计、调试能 第五代移动通信的关键技术 5G 是面向未来的通信发展需求的移动通信系统,第五代移动通信技术兴起的主要驱动力为互联网和物联网,将来人机交互和数据共享是人们日常生活的一部分,在这种交互下,人们的生活将会更加高效舒适。第五代移动通信系统不仅通信容量大,速率高,其可靠性和安全性也比第四代移动通信有了更好的改进,具有很大的发展空间,下面简单介绍几种第五代移动通信的关键技术。 1.Massive MIMO技术 大规模MIMO技术是指基站端采用大规模天线阵列,天线数超过十根甚至上百根,并且在同一时频资源内服务多个用户的多天线技术。大规模MIMO技术将传统的时域、频域、码域三维扩展为了时域、频域、码域、空域四维,新增维度极大的提高了数据传输速率。大规模MIMO天线技术提供了更强的定向能力和赋形能力如图1,大规模MIMO的空间分辨率与现有MIMO相比显著增强,能深度挖掘空间维度资源,使得网络中的多个用户可以在同一时频资源上利用大规模MIMO提供的空间自由度与基站同时进行通信,从而在不需要增加基站密度和带宽的条件下大幅度提高频谱效率。大规模MIMO可将波束集中在很窄的范围内,从而大幅度降低干扰,大幅降低发射功率,从而提高功率效率,减少用户间干扰,显著提高频谱效率。 当基站侧天线数远大于用户天线数时,各个用户的信道将趋于正交,小区内同道干扰及加性噪声趋于消失,系统性能仅受限于邻区导频的复用,这使得系统的很多性能都只与大尺度相关,与小尺度无关。大规模MIMO的无线传输技术将有可能使频谱效率和功率效率在4G 的基础上再提升一个量级。 图1. 大规模MIMO天线技术方向图 2. 非正交多址接入技术(NOMA) 5G的无线接入技术目前还有的观点关注多载波调制,如滤波器组多载波(FBMC,_ lter _bank based multicarrier),其天然的非正交性和不需要先前的分布式发射机同步。一种新的调制方式,被称为通用滤波后的多载波(UMFC)被提出。开始是OFDM信号,通过滤相邻子载波组,以减少时间/频率同步造成的旁瓣水平和载波间干扰。要解决OFDMA正交的时间窗口的缺点,即需要较大的保护带CP,使用多载波滤波器组就可以允许大的传输时延和任意高的频率补偿。日益发展的软件无线电,FFT块的大小,子载波间隔和CP长度可根据信道条件改变。因此,OFDMA允许一些参数可调,可以很好地适应5G的要求。 3. 射束分割多址技术(BDMA) 有限的频谱资源对于移动和无线技术而言是一个重大的挑战,即如何把有限的频率和时间分配给不同用户。由于这个情况,要实现提高系统的容量和质量,目前使用的多址技术包括频分多址(FDMA)、时分多址(TDMA)、码分多址(CDMA)、正交频分多址(OFDMA)等。然而,现在使用的所有多址技术中,通信系统容量依赖于时间和频率。如何发展多址接入系统,提高有限频率的系统容量是一个新的挑战。 目前发明的BDMA技术,根据MS的位置分配天线波束,实现多址接入,从而显著增加系统的容量。按此观点,MS和基站在视距(LOS)的状态,因此他们明确知道彼此的位置。在此条件下,他们能够将波束直接传送到彼此的位置以通信,而不受移动台在小区边缘的干扰。 为了在5G中适应BDMA,就要发展相位阵列天线,智能天线要能够调整波束。调整波束天线通过收集从基站和MS到达角(AOA)信息设置无线配置。自适应天线阵列的使用,是提高能力的一个可能性。 4. 全频段技术 5G网络通信技术将会以智能化、宽带化和多元化为主要的发展方向。未来网络数据业务的发展方向主要在热点密集地区和室内,而当前网络数据的流量如果在少数人使用状态下不存在延迟、低网速等问题,但一旦放开使用用户数量,网络延迟和网络速度都将会是一个巨大的问题,而物联网和智能终端所依赖的移动通信网络将会处于堵塞状态,很难发挥物联网和智能终端的优势。目前5G移动通信技术所研究的超密集组网,可以针对高度使用移动数据的地区提升流量容量1000倍,很好的解决了网络数据使用密集地区的数据传输和数据容量问题。该技术的发展,虽然在数据流量方面提升率非常高,但是由于其拓扑结构也更加复杂,各网络之间的信号干扰也是一个很大的麻烦,大家都知道一旦同一个区域的无线网络过多,就会相互之间产生干扰,影响网络的传输。因此,该技术还需要进一步的研究以适用 中国移动技术规范 中国移动技术规范 文档编号: 中国移动PTN资源自动分析优化功能需求规范书 文档版本:Version 1.0 版权声明:版权归中国移动通信集团公司所有,未经中国移动通信集团公司书面许可,任何单位或个人不得以任何形式全部或部分使用和传播本技术规范。 发布日期:2020年4月 发布单位:中国移动通信集团公司 前言 本技术规范根据中国移动PTN网络维护效能提升管理需求而制定,随着网络管理需求的不断深化,本技术规范的相关内容将会修改和完善。 本技术规范的解释权属于中国移动通信集团公司。 本技术规范由中国移动通信集团公司提出并归口。 本技术规范起草单位:中国移动通信集团公司网络部 本技术规范主要起草人: 集团公司:邓春胜、邓宇 省公司:田志坚、黄垣森、杨彬、张剑、夏志超、李勇、娄文科、梁静海、张跃明、彭鹏、党志俊 目录 PTN资源自动分析优化功能需求规范书.................... 错误!未定义书签。前言........................................................................... 错误!未定义书签。目录........................................................................... 错误!未定义书签。 一、PTN资源分析优化概述 ...................................... 错误!未定义书签。 二、功能需求说明 ..................................................... 错误!未定义书签。 2.1 ............................................................................. 物理资源分析 错误!未定义书签。 2.2逻辑资源分析 .................................................... 错误!未定义书签。 2.3流量监控及资源预警功能................................. 错误!未定义书签。 2.4资源优化分析报告功能..................................... 错误!未定义书签。 中国移动通信企业标准 QB-╳╳-╳╳╳-╳╳╳╳ 中国移动条码识别业务终端技术规范 C h i n a M o b i l e B a r c o d e R e c o g n i t i o n S e r v i c e T e r m i n a l S p e c i f i c a t i o n 版本号: 1.1.0(报批稿) ╳╳╳╳-╳╳-╳╳发布╳╳╳╳-╳╳-╳╳实施中国移动通信有限公司发布 1. 适用范围 (44) 2. 引用标准 (44) 3. 相关术语 (44) 4. 缩略语解释 (44) 5. 业务描述 (55) 5.1. 业务定义 (55) 5.2. 业务模型 (55) 6. 终端功能要求 (55) 6.1. QR码符号取景及采集 (55) 6.2. 终端解码 (66) 6.2.1. QR码符号到数据字符 (66) 6.2.2. 数据字符到应用信息 (77) 6.3. 打开和保存文件 (88) 6.3.1. 保存文件 (88) 6.3.2. 打开文件 (88) 7. 终端业务应用要求 (88) 7.1. 属性操作要求 (88) 7.2. 应用操作要求 (1010) 7.2.1. 名片应用 (1010) 7.2.2. 短信应用 (1010) 7.2.3. 邮件应用 (1010) 7.2.4. 文本应用 (1111) 7.2.5. 业务营销应用WAP业务 (1111) 7.2.6. 业务营销应用SMS业务 (1212) 7.2.7. 业务营销应用IVR业务 (1212) 8. 终端异常处理要求 (1313) 8.1. 终端解码异常事件处理要求 (1313) 8.2. 其它异常事件处理要求 (1313) 9. 终端性能要求 (1313) 10. 终端界面要求 (1414) 11. 终端硬件要求(推荐) (1414) 11.1. 摄像头 (1414) 11.2. CPU (1414) 11.3. 存储器 (1414) 12. 编制历史 (1414) 附录A 中国移动条码识别业务终端界面规范 (1515) 移动通信的基本技术之抗干扰措施 在第三代移动通信系统中除了大量的环境噪声和干扰以外,还有大量的电台产生的干扰,如邻道干扰、公道干扰和互调干扰,更重要的是第三代移动通信系统的主流标准(WCDMA、CDMA2000等)都采用了码分多址方式,CDMA码分多址系统是一个干扰受限制系统,在信息的传输中,存在着多址干扰,多径干扰和远近效应。那么为了保证网络的畅通运行,我们也采用了第三代移动通信系统采用的相关抗干扰技术进行处理。这些技术包括:空分多址(SDMA)智能天线技术,用于抗多径干扰的RAKE接收技术,抗多址干扰的联合检测技术,并对这些技术在特定系统中的性能进行了仿真。 首先介绍一下智能天线技术,智能天线利用多个天线阵元的组合进行信号处理,自动调整发射和接收方向图,以针对不同的信号环境达到最优性能。智能天线是一种空分多址技术,主要包括两个方面:空域滤波和波达方向(DOA)估计。空域滤波(也称波束赋形)的主要思想是利用信号、干扰和噪声在空间的分布,运用线性滤波技术尽可能地抑制干扰和噪声,以获得尽可能好的信号估计。 智能天线通过自适应算法控制加权,自动调整天线的方向图,使它在干扰方向形成零陷,将干扰信号抵消,而在有用信号方向形成主波束,达到抑制干扰的目的。加权系数的自动调整就是波束的形成过程。智能天线波束成型大大降低了多用户干扰,同时也减少了小区间干扰。 比起只能智能天线技术抗多径干扰的RAKE接受技术又有哪些技术有点呢?智能天线抑制干扰的能力在多数情况下受天线阵元个数的限制,且当感兴趣信号存在多个非相关多径时,阵列只保留其中的一路信号,而把零陷对准其它信号,这样,阵列能够减小由非相关多径带来的干扰,但未能发挥路径分集的优势,因而是次最优的。为此,联合时域和空域处理的接收技术成为研究的热点。 当信道存在多径时延扩展,且时延大于一个码片周期时,这些多径信号既是多径干扰,又是一些有价值的分集源,由此产生了2D-RAKE接收机。目前2D-RAKE接收机讨论最多的是应用在WCDMA上行链路。 空时RAKE接收机首先对存在角度扩展的多个路径分量进行波束成型,以降低DOA可分辨的其它用户信号产生的多址干扰或期望信号的非相关多径分量,然后将经过空间滤波后的信号送入RAKE合并器,以充分利用延迟可分辨的期望信号的多个路径的能量。空间波束形成旨在衰减干扰信号,而时间多径合并旨在利用有用信号。 与时域和空域一维干扰抑制不同的是,空时二维干扰抑制不再使用强迫置零条件,而是考虑噪声的存在,使用优化准则。空时处理有名的优化准则有两个,一个是空时最小均方误差准则,另外一个是空时最大似然准则 我们介绍的第三种抗干扰技术是联合检测技术 传统的接收技术是针对某一用户进行信号检测而把其他用户作为噪声加以处理,在用户数增多时,导致了信噪比恶化,系统性能和容量都不如人意。联合检测技术是在传统检测技术的基础上,充分利用造成多址干扰的所有用户信号及其多径的先验信息(信号之间的相关性时已知的:如确知的用户信道码,各用户的信道估计),把用户信号的分离当作一个统一的相互关联的联合检测过程来完成,从而具有优良的抗干扰性能,降低了系统对功率控制精度的要求,因此可以更加有效地利用上行链路频谱资源,显著地提高系统容量,并削弱了“远近效应”的影响。 每一样技术都有其优缺点,那么我们是否能将其结合,使技术更优化,让其在抗干扰方面体现的效果更为明显呢? 那就是智能天线与联合检测的结合(SA+JD), 其主要用于TD-SCDMA系统中,TD-SCDMA系统结合使用了智能天线和联合检测技术:1)智能天线消除小区间干扰,联合检测消除小区内干扰,两者配合使用;2)智能天线缓解了联合检测过程中信道估计的不准确对系统性能恶化的影响;3)当用户增多时,联合检测的计算量非常大,智能天线的使用减少了潜在的多用户; 4)智能天线的阵元数有限,对于M个阵元的智能天线只能抑制M-1个干扰源,而且所形成的副瓣对其它用户而言仍然是干扰,只能结合联合检测来减少这些干扰;5)在用户高速移动下,TDD模式上下行采用同样空间参数使得波束成型有偏差;用户在同一方向时,智能天线不能起到作用;还 中国移动网络门户系统技术规范 中国移动通信企业标准 QB-W-028- 中国移动网络门户系统技术规范(第一版) NMS Portal Technical Specification 版本号 1.0.0 -××-××发布 -××-××实施 中国移动通信有限公司发布 目录 1 范围........................................ 错误!未定义书签。 2 引用标准.................................... 错误!未定义书签。 3 术语定义和缩略语............................ 错误!未定义书签。 4 系统概述与建设范围.......................... 错误!未定义书签。 5 ”总部-省”两级架构......................... 错误!未定义书签。 6 组网与设备配置要求.......................... 错误!未定义书签。 7 系统功能要求................................ 错误!未定义书签。 7.1 单点登录.............................. 错误!未定义书签。 7.1.1 基本要求 ........................... 错误!未定义书签。 7.1.2 具备4A的情况 ...................... 错误!未定义书签。 7.1.3 对于未接入4A的情况 ................ 错误!未定义书签。 7.2 接入服务.............................. 错误!未定义书签。 7.2.1 B/S与C/S应用统一接入.............. 错误!未定义书签。 7.2.2 公网接入 ........................... 错误!未定义书签。 7.2.3 移动接入 ........................... 错误!未定义书签。 7.3 界面集成.............................. 错误!未定义书签。 7.3.1 界面集成的技术方式 ................. 错误!未定义书签。 7.3.2 界面集成的基本功能—展现管理 ....... 错误!未定义书签。 7.3.3 界面集成的基本业务需求 ............. 错误!未定义书签。 中国移动技术规范 文档编号: 中国移动PTN故障智能辅助定位 功能需求规范书 文档版本:Version 1.0 版权声明:版权归中国移动通信集团公司所有,未经中国移动通信集团公司书面许可,任何单位或个人不得以任何形式全部或部分使用和传播本技术规范。 发布日期:2020年10月 发布单位:中国移动通信集团公司 前言 本技术规范根据中国移动PTN网络维护效能提升管理需求而制定,随着网络管理需求的不断深化,本技术规范的相关内容将会修改和完善。 本技术规范的解释权属于中国移动通信集团公司。 本技术规范由中国移动通信集团公司提出并归口。 本技术规范起草单位:中国移动通信集团公司网络部 本技术规范主要起草人: 集团公司:邓春胜、邓宇 省公司:党志俊、娄文科、田志坚、黄垣森、杨彬、张剑、夏志超、李勇、梁静海、张跃明、彭鹏 目录 前言 (2) 目录 (3) 1.概述 (4) 2. 术语、定义和缩略语 (4) 2.1术语和定义 (4) 2.2缩略语 (4) 3.功能需求 (5) 3.1告警相关性分析 (5) 3.1.1告警根源性分析 (5) 3.1.2告警相关性原则 (6) 3.2业务相关性分析 (6) 3.3故障辅助分析及定位 (6) 3.3.1用户界面 (7) 3.3.2故障定位手段 (7) 3.3.3故障定位结果 (8) 1.概述 研究各种典型场景下PTN网络故障诊断定位方法,包括业务故障、光缆故障、设备故障、时钟故障、DCN故障、业务性能劣化等,开发出故障智能辅助定位工具,实现一键式故障智能诊断及故障原因智能输出,并给出常见故障处理建议,提高运维人员现场维护效率及能力。该辅助定位功能具备以下模块: ―告警相关性分析 ―业务相关性分析 ―故障智能分析和定位 2. 术语、定义和缩略语 2.1 术语和定义 下列术语和定义适用于本技术规范: 网元管理系统 Element Management System 简称EMS,由设备供应商提供,是为了管理一个或多个传送网网元所使用的软硬件系统。网元管理系统管理由单一设备供应商提供的网元。 2.2 缩略语 下列缩略语适用于本技术规范: 浙江移动通信有限责任公司户外通信用一体化UPS电源系统技术规范书 二零零五年十一月 一、概述 (1) 本文件为浙江移动户外通信用一体化UPS电源系统设备招标文件的技术规范书。 (2) 本技术规范书的编制依据是根据中国信息产业部“通信局(站)电源系统的总技术要求”等有关规定编制。 (3) 参与选型及报价的设备必须符合本技术规范书的要求,如相关要求低于本技术规范书的要求应论述其理由。 (4) 设备必须具有入网证,并能提供设备技术数据和电原理图及安装图。 (5) 本技术的解释权属于浙江移动通信有限责任公司。 二、范围 本技术规范规定了户外通信用一体化不间断电源——UPS的技术要求、标志、包装、运输存储。 本技术规范适用于各类户外干放、直放站、微蜂窝等通信用静止型不间断电源。 三、定义 户外通信用一体化UPS电源系统在构成上,主要有五部分组成,包括户外专用UPS主机、蓄电池组、输入输出配电、防雷保护和一体化户外机柜。几部分相互配合,实现在市电正常时使用市电能量向通信设备提供纯净稳压的交流电,市电故障时使用蓄电池能量向通信设备提供纯净稳压的交流电。各部分可集成安装在一体化机柜内或蓄电池组独立安装。 参与报价设备厂家需详列一体化电源柜体尺寸、质量,电池柜尺寸、质量以及各组成部分主要技术指标。 四、一体化户外机柜技术要求 1、柜体采用热镀锌钢板、需防锈处理,表面喷塑。满足室外安装和室外工作的防雨、防尘、 防潮、防盗要求,外观美观。 2、防护等级:IP55。 3、温度范围:-25℃~+55℃。 4、湿度范围:5%~95%。 5、挡阳棚要求:能够挡住30度角的太阳光。 6、安装/维护方便:提供多种可选安装配件,可以满足抱大杆、抱小杆、壁挂和落地等多 种安装要求。 7、振动运输实验:按照GB/T14715-93中5.3.2条 高低温储存实验:贮存条件:YD/T1059-200 测试标准:YD/T1059-2000 8、内部合理布局,可满足UPS立式、卧式等各种安装方式。电池仓外置时,其电池仓柜体 需满足上述要求。 下一代互联网技术大作业题目移动通信技术的现状与发展 姓名 专业网络工程 班级1402班 学号 1.移动通信技术的概念及相关知识 1.1移动通信的基本概念 移动通信是指通信中的移动一方通过无线的方式在移动状态下进行的通信,这种通信方式可以借助于有线通信网,通过通信网实现与世界上任何国家任何地方任何人进行通信,因此,从某种程度上说,移动通信是无线通信和有线通信的结合。移动通信的发展先后经历了第一代蜂窝模拟通信,第二代蜂窝数字通信,以及未来的第三代多媒体传输、无线Internet等宽带通信,它的最终目标是实现任何人在任何时间任何地点以任何方式与任何人进行信息传输的个人通信。 1.2移动通信的发展 目前,移动通信已从模拟通信发展到了数字移动通信阶段,并且正朝着个人通信这一更高级阶段发展。未来移动通信的目标是,能在任何时间、任何地点、向任何人提供快速可靠的通信服务。1978年底,美国贝尔实验室研制成功先进移动电话系统(AMPS),建成了蜂窝状模拟移动通信网,大大提高了系统容量。与此同时,其它发达国家也相继开发出蜂窝式公共移动通信网。这一阶段的特点是蜂窝移动通信网成为实用系统,并在世界各地迅速发展,这个系统一般被当作是第一代移动通信系统。 从20世纪80年代中期开始,数字移动通信系统进入发展和成熟时期。蜂窝 模拟网的容量已不能满足日益增长的移动用户的需求。80年代中期,欧洲首先推出了全球移动通信系统(GSM:Global System for Mobile)。随后美国和日本也相继指定了各自的数字移动通信体制。20世纪90年代初,美国Qualc omm公司推出了窄带码分多址(CDMA:Code-DivisionMultiple Access)蜂窝移动通信系统,这是移动通信系统中具有重要意义的事件。从此,码分多址这种新的无线接入技术在移动通信领域占有了越来越重要的地位。些目前正在广泛使用的数字移动通信系统是第二代移动通信系统。 1.3 移动通信的特征 现代移动通信是一门复杂的高新技术,不但集中了无线通信和有线通信的最新技术成就,而且集中了网络接收和计算机技术的许多成果。移动通信系统包括无绳电话、无线寻呼、陆地蜂窝移动通信、卫星移动通信等,几乎集中了有线和无线通信的最新技术成就,普遍应用于社会的各个领域。目前,移动通信已从模拟通信发展到了数字移动通信阶段,并且正朝着个人通信这一更高级阶段发展。未来移动通信的目标是,能在任何时间、任何地点、向任何人提供快速可靠的通信服务。要实现以上要求移动通信的无线技术的发展是离开不了的。无线通信具有跨越时空进行信息沟通的灵活性,以及连接全球的无缝隙覆盖特性,这使它成为最具吸引力的通信方式。而无线通信的快速发展,也将把人类实现个人通信的梦想一步步变为现实,也为移动通信的发展提供了很大的帮助。 1.4 移动通信的国内国际形势 中国移动同动通信3G最主要的优势是支持多媒体数据业务,而国内移动数据业务的市场要有一个培育的过程,需要运营商、业务供应商和用户多方共同促进。中国第二代移动通信网通过网络优化及加强,无论是系统容量还是移动数据业务都应能满足近期全国用户的需求。目前,第三代移动通信核心网的标准进展缓慢,国际上正在讨论全IP移动网的有关问题,核心网的发展途径并不明朗。我国移动通信3G刚刚发展起来,面对国际成熟的技术条件,中国移动通信的发展任务还有待提升。因此,我们可以冷静观察国际上各种第三代移动通信网的建设情况,发挥“后发优势”,吸取他们宝贵的经验教训。为了积累建设和运营第三代移动通信网经验,我们可以选点建设W-CDMA试验网和cdma2000试验网, 中国移动通信企业标准 中国移动机顶盒软探针北向接口技术规范 Te c h n i c a l S p e c i f i c a t i o n s f o r S e t To p B o x S o f t P r o b e a n d N o r t h -I n t e r f a c e 版本号:1.0.0 中国移动通信集团公司 发布 ╳╳╳╳-╳╳-╳╳发布 ╳╳╳╳-╳╳-╳╳实施 QB-╳╳-╳╳╳-╳╳╳╳ 目录 1前言 (2) 2范围 (2) 3规范性引用文件 (2) 4术语、定义和缩略语 (2) 5软探针与监测平台接口 (3) 6接口协议定义 (4) 6.1.BOOT接口(IF1) (4) 6.1.1.BOOT请求 (4) 6.1.2.BOOT响应 (6) 6.2.PERIODIC接口(IF2) (9) 6.2.1.PERIODIC请求 (9) 6.2.2.PERIODIC响应 (11) 6.3.PROGRAM INFO接口(IF3) (12) 6.3.1.PROGRAM INFO请求 (12) 6.3.2.PROGRAM INFO响应 (15) 6.4.ALARM接口(IF4) (16) 6.4.1.ALARM请求 (16) 6.4.2.ALARM响应 (20) 6.5.CONNECTION REQUEST之网络测试接口(IF5) (21) 6.5.1.网络测试任务下发 (21) 6.5.2.网络测试数据上报请求 (23) 6.6.常量表 (25) 6.6.1.EventCode (25) 6.6.2.AlarmCode (25) https://www.doczj.com/doc/542026160.html,workTestCode (26) 6.6.4.ProgramInfoCode (26) 6.6.5.Result (26) 6.6.6.OperationCode (27) 中国移动室内分布系统 技术规范 四川移动通信有限责任公司 2001年7月 目录 一、建设室内分布系统的必要性 (1) 二、中国移动室内覆盖目标要求 (1) 三、室内分布系统技术 (1) 1、室内分布系统的含义与作用 (1) 2、室内分布系统的信号源 (2) 2.1. 直放站 (2) 2.2. 宏蜂窝或微蜂窝 (3) 3、无源室内分布系统 (4) 3.2. 电缆式 (4) 3.2. 泄漏电缆式 (5) 3.3. 光纤式 (6) 4、有源室内分布系统 (7) 5、电梯覆盖的解决方案 (8) 四、900/1800M在室内分布系统中的应用 (10) 五、室内分布系统选型要求 (11) 1、厂商资质要求 (11) 2、各配件、器件、缆线技术指标 (11) 2.1. 无源天馈分布设备 (11) 2.2. 室内覆盖有源天线分布设备(系统指标) (14) 2.3. 干线放大器 (15) 3、具备或部分具备系统监控 (15) 4、设计施工能力 (16) 六、室内分布系统验收标准 (16) 1、安装工艺要求 (16) 1.1. 有源设备安装 (16) 1.2. 室内天线安装 (16) 1.3. 馈线及相关设施 (16) 1.4. 无源器件安装 (17) 1.5. 接地 (17) 1.6. 标签 (17) 2、网络质量要求 (18) 2.1. 覆盖达标 (18) 2.2. 质量标准 (18) 2.3. 网络运行指标 (18) 2.4. 监控系统 (19) 一、建设室内分布系统的必要性 随着我国经济的发展,人民生活水平的不断提高,移动通信事业得到了长足的进步。中国移动的GSM 蜂窝移动通信系统自1994年投入商业运行以来,一直以极高的速度发展。截至2000年底,全国GSM移动用户数量已突破6000万,网络规模容量及用户数已居世界第三位。与此相适应,中国移动的网络建设规模也在不断扩大,网络覆盖日益完善。 在此基础上,室内覆盖已成为今后网络覆盖的重点。完善室内覆盖,是为用户提供优质服务的需要,是竞争的需要。随着网络的发展,用户的要求也在不断提高,几年前用户满足于能够打电话,现在则要求随时随地可以通话,室内话务已占相当大的比重。在此情况下,必须加强室内覆盖,满足用户需求,提供优质服务。另外,竞争对手经过几年的发展,已具备相当规模,并且具有资费优势,与其相较,中国移动的核心竞争力在于网络质量,实现室内覆盖是体现差异,增强竞争力的重要手段。 室内分布系统是实现室内覆盖的主要方法,作好室内分布系统建设具有现实的重要意义。 二、中国移动室内覆盖目标要求 中国移动通信集团公司在2001年西安网络工作会议中对室内信号覆盖提出了明确的要求: “加强城市室内覆盖建设不仅是吸收话务量、提高通话质量的有力手段,还应该认识到,室内覆盖站址作为一种稀缺资源,及早抢占,将对企业的长远发展具有战略意义。各省要结合2-3年的无线网络规划,确定必须建设室内覆盖的建筑,力争在2001年完成建设。2001年要求以下重要场所实现覆盖(即室内面积95%以上信号强度大于-94db):移动用户在10万户以上城市的政府办公场所、新闻中心;飞机场候机楼、火车站候车厅;地铁;三星级以上酒店(北京、上海、广州为四星级)、高档商业办公楼、娱乐中心;营业面积超过2万平方米的大型商场;其他移动运营商有覆盖的场所;话务量大或用户投诉多的地方。” 三、室内分布系统技术 1、室内分布系统的含义与作用 室内分布系统是一套无线信号传播设备的总称,它利用电缆或光缆,辅以功分器、耦合器,将信号 移动通信技术课程标准 The Standardization Office was revised on the afternoon of December 13, 2020 《移动通信技术》课程标准 一、课程性质 本课程是通信技术专业的一门核心课程,属于职业技术必修课程。这是一门系统性、理论性强的课程,是信号与系统、通信原理的后续课程。本课程主要介绍了各种现代移动通信技术,包括移动通信的发展史、系统的构成、移动通信中的基本技术、GSM移动通信系统、CDMA技术基础及IS-95移动通信系统、3G移动通信系统等。通过本课程的学习,使该专业学生掌握蜂窝移动通信系统的基本工作原理;熟悉现有的GSM系统和CDMA系统;掌握3G技术和未来移动通信系统的技术发展趋势。使学生具有一定的移动通信系统的设计分析、系统设计和网络规划能力。 本课程的先修课程有《电路基础》、《信号与系统》、《高频电子技术》、《光纤通信技术》、《现代通信原理》等。为后续继续学习,实践等课程打下坚实的基础。 二、课程设计思路 1.教学班是主要的教学组织,班级授课制是目前教学的主要组织形式。有条件的话,也可以采用分组教学。或者几种组织方式灵活组合,尽量减轻学生的生理和心理疲劳。有条件的话尽量采用多媒体课室授课。加强实验,实验要分组进行,分组人数不宜过大,实验前多做准备工作。有时间可以多进行一些习题讲解。 2. 注意教学方法的灵活性,组织学生讨论、问题教学、进行解题指导等,尤其是有条件的话,借用多媒体的声像呈示,提供给学生一些有助于理解概念的描述图像,或者是组织学生讨论,培养学生发现问题、分析问题、解决问题的能力和探究意识。 3.充分发挥学生的主动性,努力提高学生学习的积极性,加强学生把理论用于实际的培训,培养学生自主学习、研究科学技术的能力。注意对前置课程的复习与总结,以便前后衔接,巩固与提高。考虑学生的具体情况,可在绪论课后适当复习一些前置课程的基本知识。 4.评价方法要以实现课程标准规定的教学目标为依据,鼓励学生动手实践。 5.该门课程的总学时为56学时,其中理论46学时,实践10学时。 三、课程目标 (一)总体目标中国移动统一信息平台技术规范
对移动通信技术的认识
移动通信技术参考答案
中国XX业务支撑网4A安全技术规范
《移动通信技术》课程标准
(完整word版)第五代移动通信的关键技术
中国移动技术规范
CMCC_v22_中国移动条码识别业务终端技术规范
移动通信的基本技术之抗干扰措施
中国移动网络门户系统技术规范
中国移动技术规范
中国移动浙江公司移动室外UPS技术规范
移动通信技术的现状与发展
中国移动机顶盒软探针北向接口技术规范v1.0.0
中国移动室内分布系统技术规范
移动通信技术课程标准
相关主题
文本预览