
VIDEO-DRIVEN ANIMATION OF HUMAN BODY SCANS
Edilson de Aguiar,Rhaleb Zayer,Christian Theobalt,Marcus Magnor and Hans-Peter Seidel
MPI Informatik,Saarbr¨u cken,Germany
ABSTRACT
We present a versatile,fast and simple framework to gener-ate animations of scanned human characters from input multi-view video sequences.Our method is purely mesh-based and requires only a minimum of manual interaction.The pro-posed algorithm implicitly generates realistic body deforma-tions and can easily transfer motions between human subjects of completely different shape and proportions.We feature a working prototype system that demonstrates that our method can generate convincing lifelike character animations from marker-less optical motion capture data.
Index Terms—Image motion analysis,Computer graphics, Animation.
1.INTRODUCTION
In recent years,photo-realistic computer-generated animations of humans have become the most important visual effect in motion pictures and computer games.To generate virtual peo-ple,animators make use of a well-established but often in?ex-ible set of tools(see also Sect.2)that makes a high amount of manual interaction unavoidable.
First,the geometry of the human body is hand-crafted in a modeling software or obtained from a laser scan of a real indi-vidual[1].In a second step,a kinematic skeleton model is im-planted into the body by means of,at best,a semi-automatic procedure[2].In order to couple the skeleton with the surface mesh,an appropriate representation of pose-dependent skin deformation has to be found[3].Finally,a description of body motion in terms of joint parameters of the skeleton is required. It can either be designed in a computer or learned from a real person by means of motion capture[4,5].Although the in-terplay of all these steps delivers animations of stunning nat-uralness,the whole process is very labor-intensive and does not easily allow for the interchange of animation descriptions between different virtual persons.
In this paper,we present a versatile,fast and simple mesh-based approach to animate human scans that completely inte-grates into the animator’s traditional animation work?ow.Our system produces realistic pose-dependent body deformations Thanks to EC for supporting within FP6under Grant511568with the acronym3DTV implicitly by means of a harmonic?eld interpolation.Fur-thermore,it solves the motion transfer problem,i.e.it enables the animator to interchange motions between persons of even widely different body proportions with no additional effort. The paper proceeds with a review of related work in Sect.2. An overview of our approach is given in Sect.3,and our shape deformation method is described in Sect.4.We demonstrate that we can realistically animate human scans using marker-less motion capture data in Sect.5.Finally,results and con-clusions are presented in Sect.6.
2.RELATED WORK
The?rst step in human character animation is the acquisition of a human body model comprising a surface mesh and an un-derlying animation skeleton[6].Thereafter,mesh and skele-ton have to be connected such that the surface deforms realis-tically with the body motion[3].The virtual human is awak-ened by specifying motion parameters for the joints in the skeleton.The most authentic method to generate such motion descriptors is through optical marker-based[4]or marker-free motion capture[5].Unfortunately,reusing motion capture data for subjects of different body proportions is not trivial, and requires computationally expensive motion editing[7] and motion retargetting techniques[8].
By extending ideas on mesh deformation techniques we pro-pose a versatile and simple framework to animate human scans. In the mesh editing context,see[9,10],differential coordi-nates are used to deform a mesh while preserving its geomet-ric detail.The potential of such methods for mesh editing[9] and animation[11,12]has already been stated in previous publications.Most recently,a multi-grid technique for ef?-cient deformation of large meshes was presented[13]and a framework for performing constrained mesh deformation us-ing gradient domain techniques has been developed in[14]. Both methods are conceptually related to our system.How-ever,none of the papers provides a complete integration of the surface deformation approach with a marker-less motion acquisition system.On the other hand,we see potential use of these methods within our framework for enhancing the an-imation quality and the speed of our system.
Our system is most closely related to the SCAPE method[15]. The SCAPE model learns pose and shape variation across in-
Target mesh
Correspondences
Actor performing
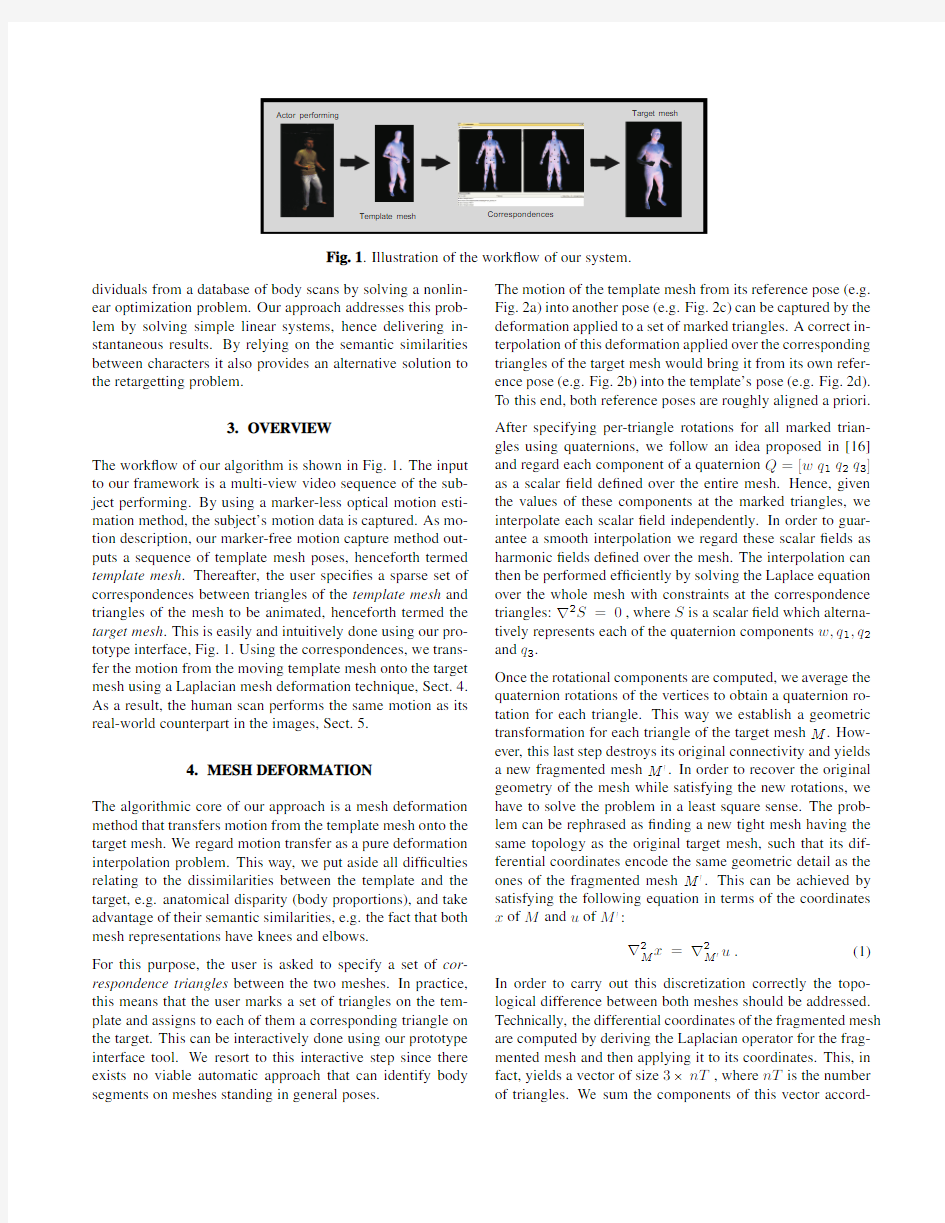
Fig.1.Illustration of the work?ow of our system.
dividuals from a database of body scans by solving a nonlin-ear optimization problem.Our approach addresses this prob-lem by solving simple linear systems,hence delivering in-stantaneous results.By relying on the semantic similarities between characters it also provides an alternative solution to the retargetting problem.
3.OVERVIEW
The work?ow of our algorithm is shown in Fig.1.The input to our framework is a multi-view video sequence of the sub-ject performing.By using a marker-less optical motion esti-mation method,the subject’s motion data is captured.As mo-tion description,our marker-free motion capture method out-puts a sequence of template mesh poses,henceforth termed template mesh.Thereafter,the user speci?es a sparse set of correspondences between triangles of the template mesh and triangles of the mesh to be animated,henceforth termed the target mesh.This is easily and intuitively done using our pro-totype interface,https://www.doczj.com/doc/4816723794.html,ing the correspondences,we trans-fer the motion from the moving template mesh onto the target mesh using a Laplacian mesh deformation technique,Sect.4. As a result,the human scan performs the same motion as its real-world counterpart in the images,Sect.5.
4.MESH DEFORMATION
The algorithmic core of our approach is a mesh deformation method that transfers motion from the template mesh onto the target mesh.We regard motion transfer as a pure deformation interpolation problem.This way,we put aside all dif?culties relating to the dissimilarities between the template and the target,e.g.anatomical disparity(body proportions),and take advantage of their semantic similarities,e.g.the fact that both mesh representations have knees and elbows.
For this purpose,the user is asked to specify a set of cor-respondence triangles between the two meshes.In practice, this means that the user marks a set of triangles on the tem-plate and assigns to each of them a corresponding triangle on the target.This can be interactively done using our prototype interface tool.We resort to this interactive step since there exists no viable automatic approach that can identify body segments on meshes standing in general poses.The motion of the template mesh from its reference pose(e.g. Fig.2a)into another pose(e.g.Fig.2c)can be captured by the deformation applied to a set of marked triangles.A correct in-terpolation of this deformation applied over the corresponding triangles of the target mesh would bring it from its own refer-ence pose(e.g.Fig.2b)into the template’s pose(e.g.Fig.2d). To this end,both reference poses are roughly aligned a priori. After specifying per-triangle rotations for all marked trian-gles using quaternions,we follow an idea proposed in[16] and regard each component of a quaternion Q=[w q1q2q3] as a scalar?eld de?ned over the entire mesh.Hence,given the values of these components at the marked triangles,we interpolate each scalar?eld independently.In order to guar-antee a smooth interpolation we regard these scalar?elds as harmonic?elds de?ned over the mesh.The interpolation can then be performed ef?ciently by solving the Laplace equation over the whole mesh with constraints at the correspondence triangles:?2S=0,where S is a scalar?eld which alterna-tively represents each of the quaternion components w,q1,q2 and q3.
Once the rotational components are computed,we average the quaternion rotations of the vertices to obtain a quaternion ro-tation for each triangle.This way we establish a geometric transformation for each triangle of the target mesh M.How-ever,this last step destroys its original connectivity and yields a new fragmented mesh M .In order to recover the original geometry of the mesh while satisfying the new rotations,we have to solve the problem in a least square sense.The prob-lem can be rephrased as?nding a new tight mesh having the same topology as the original target mesh,such that its dif-ferential coordinates encode the same geometric detail as the ones of the fragmented mesh M .This can be achieved by satisfying the following equation in terms of the coordinates x of M and u of M :
?2
M
x=?2M u.(1) In order to carry out this discretization correctly the topo-logical difference between both meshes should be addressed. Technically,the differential coordinates of the fragmented mesh are computed by deriving the Laplacian operator for the frag-mented mesh and then applying it to its coordinates.This,in fact,yields a vector of size3×nT,where nT is the number of triangles.We sum the components of this vector accord-
(a)
(b)
(c)(d)
Fig.2.A template model(a)and a high-resolution body scan (b)in their respective reference poses.The template in a pose obtained via motion capture(c)and its pose transferred to the human scan(d).
ing to the connectivity of the original mesh M.This yields a new vector U reduced of size nV,where nV is the number of vertices in M,and the discrete form of Eq.1reads as simple as
LX=U reduced,(2) where the matrix L is the discrete Laplace operator.During the processing of an animation sequence,the differential oper-ator matrix does not change.Furthermore,since it is symmet-ric positive de?nite we can perform a sparse Cholesky decom-position as preprocessing step and perform only back substi-tution for each frame.This enables us to compute novel poses of the target mesh at interactive rates for meshes of the order of30to50thousand triangles.
5.MARKER-LESS ANIMATION
Marker-less tracking methods estimate motion parameters from image features in the raw video footage showing a moving https://www.doczj.com/doc/4816723794.html,ing such motion capture technique as front-end to our algorithm,we are able to create two intriguing applica-tions:video-driven animation and3D video.
5.1.Video-driven Animation
For non-intrusively estimating motion parameters,we make use of the passive optical motion capture approach proposed in[17].To this end,we record a moving person with eight static video cameras that are roughly placed in a circle around the center of the scene.From the frame-synchronized video streams,the shape and the motion parameters of the human are estimated.To achieve this purpose,a template model, (see Fig.2a),comprising of a kinematic skeleton and sixteen separate closed surface segments is?tted to each time step of video by means of silhouette-matching.The output of the method conveniently represents the captured motion as a se-quence in which the template model subsequently strikes the estimated body
poses.Fig.3.Video-driven animation:Motion parameters are ex-tracted from raw video footage of human performances(top row).By this means,body poses of a video-taped individual can easily be mapped to body scans of other human subjects (bottom row).
This output format can be directly used as input to our pipeline. The animator speci?es triangle correspondences between the template and the scanned mesh that shall be animated.Fi-nally,our algorithm makes the human scan mimic the motion that we have captured in video.Realistic surface deforma-tions of the output mesh are implicitly generated.In order to demonstrate the performance of video-driven animation,we animate our female(264K triangle)and male(294K triangle) Cyberware scans with two very different captured motion se-quences.The?rst sequence contains156frames and shows a female subject performing a capoeira move.The second sequence is330frames long and shows a dancing male sub-ject.Fig.3shows a comparison between actual input video frames and human scans striking similar poses.It illustrates that body poses recorded on video can be faithfully transfered to3D models of arbitrary human subjects.Differences in body shape and skeletal proportions can be completely ne-glected.
5.2.3D Video
By means of video-driven animation,Sect.5.1,we can also generate3D videos of moving characters.In the traditional model-based approach to3D video a simpli?ed body model is used to carry out a passive optical motion estimation from multiple video streams[17].During rendering,the same sim-pli?ed shape template is displayed in the sequence of captured body poses and textured from the input videos.Although these methods deliver realistic free-viewpoint renditions of virtual actors,we expect that a more accurate underlying ge-ometry increases realism even further.
Fig.4.Our approach enables the creation of3D videos with high-quality geometry models.
To demonstrate the feasibility of this approach in practice,we have acquired full-body surface scans of several individuals in our studio.To this end,we merged several partial body scans performed with our MINOLTA VI-910which is best suited for scanning small objects.Thus the quality of our scans is far below the quality of scans acquired using full-body scan-ners.For each scanned individual,we also recorded several motion sequences with multiple synchronized video cameras. We use the method from Sect.5.1to animate the scans from the captured motion data.During3D video display,the an-imated scan is projectively textured with the captured video frames.
Fig.4shows two free-viewpoint renditions of a dynamically textured animated scan in comparison to input images of the test subject.The free-viewpoint renditions re?ect the true ap-pearance of the actor.Since we are given a better surface geometry,texture blending artefacts are hardly observed.Re-maining artefacts in the rendering can be clearly attributed to the non-optimal scanning apparatus we used.
6.RESULTS AND CONCLUSION
To demonstrate the potential of our method we conducted sev-eral experiments.Due to their high resolution,we used the Cyberware models in most of our experiments.Marker-less motion acquisition enables us to perform video-driven ani-mation.Both of our models in Fig.3authentically mimic the human performances captured on video.This also allows for producing3D video,Fig.4.The substantiated results and the accompanying video(that can be downloaded from[18])con-?rm that our method is capable of animating human scans at a low interaction cost.
As for any novel technique our method still has some limita-tions.For extreme deformation we note that there is generally some loss in volume due to the nature of our interpolation.We expect that using the volumetric approach proposed in[19] would reduce such artefacts.Another limitation is that our system can not enforce hard constraints.Our method satis?es the deformation constraints in a least-square sense.Although it is not possible to explicitly enforce hard constraints,they can be implicitly enforced by increasing the number of corre-spondences associated with a marker.We nonetheless devised a powerful framework for animating human scans.The proposed method is easy and intuitive to use.By means of the same ef?cient methodology our ap-proach simultaneously solves the animation,the surface de-formation and the motion retargetting problem.Since our method relies only on setting up and solving linear systems, the implementation and the reproduction of our results are straightforward.As a direction for future work,we would like to combine our technique with an approach to learn per-time-step surface deformations from input video footage.
7.REFERENCES
[1] B.Allen,B.Curless,and Z.Popovic,“The space of human body
shapes:reconstruction and parameterization from range scans,”ACM Trans.Graph.,vol.22,no.3,pp.587–594,2003.
[2]L.Herda,P.Fua,R.Pl¨a nkers,R.Boulic,and D.Thalmann,“Skeleton-
based motion capture for robust reconstruction of human motion,”in Proc.of CA’00.2000,p.77ff,IEEE Computer Society.
[3]J.P.Lewis,M.Cordner,and N.Fong,“Pose space deformation:a uni-
?ed approach to shape interpolation and skeleton-driven deformation,”
in Proc.of ACM SIGGRAPH’00,2000,pp.165–172.
[4] B.Bodenheimer,C.Rose,S.Rosenthal,and J.Pella,“The process of
motion capture:Dealing with the data,”in Computer Animation and Simulation’97,Sept.1997,pp.3–18.
[5]T.B.Moeslund and E.Granum,“A survey of computer vision-based
human motion capture,”CVIU,vol.81,no.3,pp.231–268,2001. [6]N.Badler,D.Metaxas,and N.Magnenat Thalmann,Virtual Humans,
Morgan Kaufmann,1999.
[7]M.Gleicher,“Motion editing with space-time constraints,”in Proc.of
1997Symposium on Interactive3D Graphics,1997,p.139ff.
[8]S.Tak and H.-S.Ko,“A physically-based motion retargeting?lter,”
ACM Trans.Graph.,vol.24,no.1,pp.98–117,2005.
[9]Marc Alexa,Marie-Paule Cani,and Karan Singh,“Interactive shape
modeling,”In Eurographics course notes(2005).
[10]Olga Sorkine,“Differential representations for mesh processing,”Com-
puter Graphics Forum,vol.25,no.4,2006.
[11]R.W.Sumner and J.Popovic,“Deformation transfer for triangle
meshes,”ACM Trans.Graph.,vol.23,no.3,pp.399–405,2004. [12]R.W.Sumner,M.Zwicker,C.Gotsman,and J.Popovic,“Mesh-based
inverse kinematics,”ACM Trans.Graph.,vol.24,no.3,pp.488–495, 2005.
[13]L.Shi,Y.Yu,N.Bell,and W.-W.Feng,“A fast multigrid algorithm for
mesh deformation,”ACM Trans.Graph.,vol.25,no.3,pp.1108–1117, 2006.
[14]J.Huang,X.Shi,X.Liu,K.Zhou,L.-Y.Wei,S.-H.Teng,H.Bao,
B.Guo,and H.-Y.Shum,“Subspace gradient domain mesh deforma-
tion,”ACM Trans.Graph.,vol.25,no.3,pp.1126–1134,2006. [15] D.Anguelov,P.Srinivasan,D.Koller,S.Thrun,J.Rodgers,and
J.Davis,“Scape:shape completion and animation of people,”ACM Trans.Graph.,vol.24,no.3,pp.408–416,2005.
[16]R.Zayer,C.R¨o ssl,Z.Karni,and H.-P.Seidel,“Harmonic guidance for
surface deformation,”in Proc.of Eurographics2005,2005,vol.24,pp.
601–609.
[17]J.Carranza,C.Theobalt,M.Magnor,and H.-P.Seidel,“Free-viewpoint
video of human actors,”ACM Trans.Graph.(Proc.of SIGGRAPH’03), vol.22,no.3,pp.569–577,2003.
[18],”http://www.mpi-inf.mpg.de/~edeaguia/3dtvConVideo.avi.
[19]K.Zhou,J.Huang,J.Snyder,X.Liu,H.Bao,B.Guo,and H.-Y.Shum,
“Large mesh deformation using the volumetric graph laplacian,”ACM Trans.Graph.,vol.24,no.3,pp.496–503,2005.
Saleae Logic 16 逻辑分析仪使用上手手册 Saleae Logic 16 购买地址:https://www.doczj.com/doc/4816723794.html,
从2014年六月份开始,Saleae官方开始主推他的1.1.19版本的逻辑分析仪界面。我在这里给大家介绍一下新软件的采集设置,波形查看以及协议解析等功能和操作步骤。 第一节, 软件的安装 SALEAE 官方提供了WINDOWS ,LINUX ,MAC操作系统的软件版本,其中WINDOWS 版本又分32位系统和64位系统。如果您的电脑是XP 或者WIN7 32位,请安装32位软件,如果是WIN8 或者WIN7 64位,请安装64位软件。对于WIN7系统的用户如果不知道自己的系统是32位还是64位,可以右击“我的电脑”之后再属性里面看到红色箭头部分指示的是32位系统,您应该选择安装32位软件: 这里我用的操作系统是WIN7 32 ,选择安装Logic+Setup+1.1.19+(32-bit)这个安装文件。 之后一路回车安装好软件。这里不再截图,安装完毕后,可以开启软件,显示出界面:
在安装软件的同时,驱动程序已经被注册到系统了了,当插入SALEAE 16逻辑分析仪后就可以自动安装安装驱动。 第二节, 软件界面的总体介绍 软件界面基本是左中右的布局,左边主要是采集和显示设置,右边是分析和解析设置,中间是波形显示区域。 软件支持脱机模拟采集,没有实际的硬件也可以感受一下软件的界面和操 作。点,可以在波形区域模拟显示出一些软件生成的数据,如果您设置了解析(解析设置方法在下面讲),可以根据所设置的协议,生成一些符合协议解析要求的模拟数值。 由于默认的演示模式是8通道的,我们可以设置成16通道的。
1 HALO-H2O 超高精度高纯气体微量水分仪用户操作手册 指导手册 M7000 系列 版本 B
2 重要标识 这个警告标志提醒用户人身安全 这是高压标志提示有高压存在 这个警告标志提醒用户有激光射线存在 警告标签 注意:在操作HALO-H2O之前请确认已阅读手册中所有的警告注释,为了您的使用方便我们已经列出所有的警示信息,您必须在操作仪器之前通读此手册,否则可能对仪器造成损害。 使用有毒,易燃易爆或混合后易爆气体(如氢气和氧气混合)之前,请先用惰性气体彻底吹扫管路,否则气体管路中的残余气体可能会引起爆炸等危险,对仪器造成损害。 使用合格的独立电源线(1米,120V或220V, 2极3相电源,接地,耐压15A) 在进行任何维修维护装箱之前,请切断电源
3 目录 1. 规格和图表 1.1 规格 1.2 尺寸图 1.3 单HALO-H2O 尺寸图 1.4 HALO-H2O 前面板 1.5 HALO-H2O 后面板 2. 安装HALO-H2O 2.1 总论 2.2 拆包 2.3 产品序列号 2.4 采样管路的准备 2.5 组装采样管路 2.6 采样管路渗漏试验 2.7 HALO-H2O 的放置 2.8 排空压力的考虑 2.9 采样管路进口和出口的连接 2.10 封盖采样管路进口和出口,防止污染 2.11 连接考虑 3. 启动和操作 3.1 介绍 3.2 用户界面 3.3 操作模式 3.4 其他工具栏功能 4. 远程操作 4.1 概述 4.2 界面连接 4.3 指令 5. 发现并修理故障及日常维护 5.1 概述 5.2 定期检修 5.3 故障指南
文件编号: 文件版本: A ZVB矢量网络分析仪操作指导书 V 1.0 拟制 _____________ 日期_______________ 审核 _____________ 日期_______________ 会审 _____________ 日期_______________ 批准 _____________ 日期______________ 生效日期:2006.10
操作规范: 使用者要爱护仪器,确保文明使用。 1、开机前确保稳压电源及仪器地线的正确连接。 2、使用中要求必须佩戴防静电手镯。 3、使用中不得接触仪器接头内芯(含连接电缆) 4、使用时不允许工作台有较大振动。 5、使用中不能随意切断电源,造成不正常关机。不能频繁开关机。 6、使用射频电缆时不要用力大,确保电缆保持较大的弧度。用毕电缆接头上加接头盖。 7、旋接接头时,要旋接头的螺套,尽量确保内芯不旋转。 8、尽量协调、少用校准件。校准件用毕必须加盖放回器件盒。 9、转接件用毕应加盖后放回盒中。 10、停用时必须关机,关闭稳压电源。方可打扫卫生。 11、无源器件调试必须佩戴干净的手套。 ______________________________________________________________________________
概述:1、本说明书主要为无源器件调试而做,涵盖了无源器件调试所需的矢量网络分析仪基本能,关于矢量网络分析仪的其它更进一步的使用,请参照仪器所附的使用说明书。 2、本说明书仅以ZVB4矢量网络分析仪为例,对其它型号矢量网络分析仪,操作步骤基本相 同,只是按键和菜单稍有差别。 3、仪器使用的一般要求仪器操作使用规范。 4、方框内带单引号的键为软菜单(soft menu), 5、本仪器几乎所有操作都可以通过鼠标进行。
HTY-DI1000 总有机碳(TOC)分析仪 使 用 说 明 书 泰林生物技术设备
注意事项 1. 更换紫外灯或蠕动泵管时,必须在打开仪器后盖板前切断电源,以避免发生电击危险。 2. 非本公司维修人员或授权专业人员不得随意拆卸机箱部的零部件及线路板,否则造成仪器损坏后果自负。 3. 更换保险丝请使用相同的规格,以免发生短路或者损坏仪器。 4. 本产品需一级安全防护,电源必须可靠接地,否则可能导致触电事故或损坏仪器。 5. 仪器使用时,若水样中含有可见的不溶性微粒,必须在进样管前安装微粒过滤器,以免仪器部管路发生堵塞。若在线检测的水样中固体悬浮物含量较高,须定期更换过滤器。 6. 若先前检测的水样中有机碳浓度超出了仪器的检测围,在检测其它有机碳浓度相对较低的水样之前,先用高纯水或有机碳浓度较低的去离子水冲洗管路,冲洗时间参考说明书。 7.若仪器作在线检测使用,需在离线状态下冲洗管路和校准完毕后再连接在线检测装置。
目录 一、产品简介 (4) 1.1 系统组成 (4) 1.2 在线检测装置 (4) 1.3 离线检测 (4) 1.4 分流器 (4) 1.5 氧化反应器 (5) 1.6 二氧化碳传感器 (5) 1.7 二氧化碳测量循环 (5) 二、结构特征与工作原理 (5) 2.1 结构特征 (5) 2.2 工作原理 (7) 2.3 应用围 (7) 三、技术参数与特点 (8) 3.1 主要技术参数 (8) 3.2 特点 (8) 四、使用与操作方法 (9) 4.1 冲洗管路 (9) 4.2 校准仪器 (9) 4.2.1 校准目的 (9) 4.2.2 校准周期 (9) 4.2.3 校准溶液 (9) 4.2.4 校准步骤 (10) 4.3 参数设置 (11) 4.3.1 日期和时间 (11) 4.3.2 校准调整 (12) 4.3.3 部件使用期限设定 (13) 4.3.4 报警值设定 (13) 4.3.5 选择是否打印 (14)
逻辑分析仪UsbeeAXPro中文说 明书
USBEE AX示波器逻辑分析仪 使用说明书 1. 简介 USBEE AX示波器逻辑分析仪是一款基于PC的高性价比的电路分析调试工具。全面兼容和支持“USBee AX Pro”上位机软件。能够实现示波器,逻辑分析仪等等很多功能。 注意:不正确的使用会造成设备损坏和人员伤害!使用中: ●保证GND线与你的目标板地电位相连; ●数字信号地接DGND.数字通道DCH0 - 7,正常测试电压范围为0-8V; ●模拟信号地接AGND.模拟通道ACH1 的电压范围-10到+10V;x10是 +/-100V; x0.2是+/-2V. ●注意ACH1,x10和x0.2不可同时接,比如测5V信号是接AGND和 ACH1,x10和x0.2悬空; ●数字通道DCH0 - 7保护电压(不损坏仪器,但测试结果不正确)最大 为10v; ●模拟通道保护电压为ACH1:+/-100v;x10:+/-300v;x0.2:+/-10v。 但不要长时间保持。 ●D3V3是仪器提供的输出3.3v的接口,可对外提供不超过100mA的电 流输出。
●USBEE AX的数字通道能够驱动输出,在使用前一定不要超过电压和电 流范围; ●先将USBEE AX连接到PC,再运行软件。 电脑系统要求 ●Windows 8.1/7/ XP或者Windows 操作系统; ●Pentium以上处理器; ●USB2.0高速接口,不支持USB1.1全速端口工作; 设备清单 ●USBEE AX设备一台; ●测试杜邦线一排10根(可选带测试夹); ●USB连接线一条; ●光盘(软件和说明文档,也可从商品描述页面提供的链接下载); 设备工作在最高的采样速度时,对USB带宽和处理器资源要求较高,为了保证稳定工作: ●不要在PC上连接其它USB高速设备; ●最好不要在软件采样和输出信号时运行其它的程序。 2.安装USBEE AX PRO 的步骤: 1. 安装软件前请勿连接硬件。 2.安装USBEE AX PRO 软件。注意: a)只有在WIN7 64/WIN8 64下才选择安装axsw64BIT_English文件夹。其余选择32位版本。
SFY-20红外线快速水分测定仪 使用说明书 上海高致精密仪器有限公司 第一章概述 首先感谢您选用本公司生产的SFY-20红外线快速水分测定仪。请您在使用前详细阅读本说明书, 1.1用途、特点 SFY-20红外线快速水分测定仪,采用热解重量原理设计的,是一种新型快速水分检测仪器。水分测定仪在测量样品重量的同时,红外加热单元和水分蒸发通道快速干燥样品,在干燥过程中,水分仪持续测量并即时显示样品丢失的水分含量%,干燥程序完成后,最终测定的水分含量值被锁定显示。与国际烘箱加热法相比,红外加热可以最短时间内达到最大加热功率,在高温下样品快速被干燥,其检测结果与国标烘箱法具有良好的一致性,具有可替代性,且检测效率远远高于烘箱法。一般样品只需几分钟即可完成测定。该仪器操作简单,测试准确,显示部分采用红色数码管,示值清晰可见,分别可显示水分值,样品初值,终值,测定时间,温度初值,最终值等数据,并具有与计算机,打印机连接功能。因此该水分仪可广泛应用于一切需要快速测定水分的行业,如医药,粮食、种子,菜籽,烟草,化工,茶叶,食品、肉类、种子、石墨、油墨、锯末、沙土、砂石以及纺织,农林、造纸、橡胶、塑胶等行业中的实验室与生产过程中。 1.2 SFY-20主要技术指标 水分测定范围(%): 0.01%-100% 测定试样重量(g): 0-90 最大称重量:(g): 20 称量最小读数(g): 0.001 水分含量可读性(%): 0.01 温度设定范围(℃):室温-160 显示参数: 7种 通讯接口:标准RS232接口 波特率:9600/S比特 通讯方式:MCS51系列单片机通讯方式2。 供电电源:电压220v±10%频率50HZ±1HZ 试样温度:-40℃-50℃ 工作环境温度:-5℃-50℃ 相对湿度:≤80%RΗ 外形尺寸:380mm×205mm×325mm 净重量:3.7kg 1
50A型B O D测定仪说 明书
执行标准:GB7488-87 Q/02 LDZ013-2001 50A型BOD快速测定仪使用说明书
目录 一、概述 (1) 二、仪器用途和特点 (2) 三、技术指标及规格 (3) 四、结构原理 (3) 五、溶液配制 (9) 六、使用方法 (10) 七、注意事项 (17) 八、日常维护 (18) 九、简单故障排除 (19) 十、装箱单 (20) 一、概述 生物化学需氧量(Biochemical Oxygen Demand, BOD)作为国际上最常用最重要的水质有机污染指标和检测参数之一,其传统测定方法五日生化需氧量(BOD5)标准 稀释法,仍是目前国内外比较 普遍采用的分析检测方法,但该标准方法需要5天分析周期,操作过程烦琐,因而给污水处理及环境检测带来了许多不便。广大的环境检测人员迫切需要一种测量迅速、准确的快速测定仪,以提高工作效率和减少劳动强度。 50A型BOD快速测定仪采用微生物电极法,能快速测定水样
中的BOD值,而且操作简便,测量准确。其原理基于微生物对有机 物的耗氧代谢,测定BOD只涉及到初始氧化速率,因而可在8-15 分钟内完成一个样品的测定。大大缩短了测定所需的时间。该方法符合《水质生化需氧量(BOD)微生物传感器快速测定法》 (HJ/T86-2002),在2002年出版发行的《水和废水检测分析方法》 (第四版)列为A类方法。 二、仪器用途和特点 2.1 仪器的用途 50A型BOD快速测定仪采用微生物电极法,能快速测定水样中的BOD值,而且操作简便,测量准确,测定速度快,适用于测定地表水、生活污水、不含对微生物胡明显毒害作用的工业废水中的 BOD。 2.2 仪器的特点 1、原理先进: 采用微生物电极法 2、操作简单: 微电脑控制,智能化测量 3、测量时间短: 8分钟完成一个样品测定 4、维护简单: 只需定期更换微生物膜和输液管 5、水样无需前处理,抗干扰能力强 6、安全性高,所用菌种对人体无害
网络分析仪工作原理及使用要点 本文简要介绍41所生产的AV362O矢量网络分析的测量基本工作原理以及正确使用矢量网络分析测量电缆传输及反射性能的注意事项。 1.DUT对射频信号的响应 矢量网络分析仪信号源产生一测试信号,当测试信号通过待测件时,一部分信号被反射,另一部分则被传输。图1说明了测试信号通过被测器件(DUT)后的响应。 图1DUT 对信号的响应 2.整机原理: 矢量网络分析仪用于测量器件和网络的反射特性和传输特性,主要包括合成信号源、S 参数测试装置、幅相接收机和显示部分。合成信号源产生30k~6GHz的信号,此信号与幅相接收机中心频率实现同步扫描;S参数测试装置用于分离被测件的入射信号R、反射信号A 和传输信号B;幅相接收机将射频信号转换成频率固定的中频信号,为了真实测量出被测网络的幅度特性、相位特性,要求在频率变换过程中,被测信号幅度信息和相位信息都不能丢失,因此必须采用系统锁相技术;显示部分将测量结果以各种形式显示出来。其原理框图如图2所示: 图2矢量网络分析仪整机原理框图 矢量网络分析内置合成信号源产生30k~6GHz的信号,经过S参数测试装置分成两路,一路作为参考信号R,另一路作为激励信号,激励信号经过被测件后产生反射信号A和传输信号B,由S参数测试装置进行分离,R、A、B三路射频信号在幅相接收机中进行下变频,产生4kHz的中频信号,由于采用系统锁相技术,合成扫频信号源和幅相接收机同在一个锁相环路中,共用同一时基,因此被测网络的幅度信息和相位信息包含在4kHz的中频信号中,此中频信号经过A/D模拟数字变换器转换为数字信号,嵌入式计算机和数字信号处理器
. BOD测定仪操作规程 1、接通培养箱电源,将培养箱上温度设置显示温度为20℃,保持温度为20℃。把主机放在培养箱上,将BOD主机电源线的一端插入仪器后部插座上,另一端插入培养箱内对应插座上,打开仪器电源开关,仪器前侧电源指示灯亮,8只搅拌器正常搅拌。 2、预先估计被测样品的BOD5值范围,选择接近的量程。如无法估计,有条件的亦可先测定该样品的COD值,然后根据该样品COD值来确定该样品的BOD5值,(通常样品BOD5值为该样品COD值的0.8倍)。对BOD5值在1000mg/L以下,含有足够的需氧微生物的样品,不需接种,可以直接根据选定的测量范围,从取水样量表中查得取样量。根据所测样品数量的多少(最多可同时测定8个样品)来确定用几个培养瓶测定其中一个样品。如果只有两个水样,可选择2~4个培养瓶测定其中一个水样,预先估计该水样的BOD5值的范围,确定每个培养瓶的取样量,从而确定几个培养瓶所需的总取样量。将该水样上清液倒入烧杯(1000mL或2000mL)中,如需接种则按5%或10%的比例对水样接种。在烧杯放入一搅拌子,将烧杯放入培养箱内主机上恒温搅拌2~3小时。一般情况下调节该水样的pH值,至6.7~7.5之间(最佳点为pH 7.2)。如超出这一范围,可用适当浓度的氢氧化钠或硫酸溶液中和。然后用量筒按所选量程取样量量取水样体积倒入培养瓶中。同理,可测定另几个水样。 3、每只培养瓶中放入1只搅拌子,培养瓶放在主机相应位置上,对试验水样进行搅拌,直至水样温度在20℃±1℃范围内(约需1~2小时)。 4、取8只清洗干净并干燥的密封杯,杯中放入5~6粒NaOH或KOH颗粒,将培养瓶放置在主机对应位置上,使溶液开始搅拌,轻轻拧上水柱盖和培养瓶盖。 5、稳定30min~60min,同时拧紧培养瓶盖和水柱盖,接着松开固定压力计刻度尺的旋钮,并调节刻度尺,使0刻度正好与汞柱的顶端水平重合,然后重新拧紧旋钮。 6、如果不能调节到0刻度,再次松开培养瓶盖和水柱盖,并重新调整刻度尺的位置。如果仍不能调节到0刻度,可用吸耳球在培养瓶接头塑料管入口处反复小心抽吸,直至汞柱中没有气隙,刻度尺调节到0刻度。然后拧紧培养瓶盖和水柱盖。零刻度调节后,汞柱的高度在1小时内可能会有所上升或下降,若偏离了零刻度重新调整0点。这种现象可能是由于培养瓶中空气膨胀或收缩所引起的。 7、在坐标图纸上画出各个样品BOD5—t曲线,从曲线上,可判定测量开始后120小时内任一时间样品BOD5的数值。 可编辑范本
KF-1B水份测定仪说明书 一、原理: 本仪器为卡尔·费休(Kart Fischer)容量滴定法测定水份含量的仪器,采用“永停法”来确定终点,。 根据半电池反应:I2+2e<=>2Iˉ 溶液中同时存在I2及Iˉ时上述反应分别在两个电极上进行,既在一个电极上I2被还原,而再另一个电极上Iˉ被氧化,因此在两个电极之间有电流通过。如果溶液中只有Iˉ而无I2则电极间无电流通过。 当滴定终点时溶液中有微量卡尔·费休试剂存在,即有Iˉ及I2同时存在,这时溶液导电,仪器显示滴定到达终点。 反应式:I2+SO2+3C5H5N+CH3OH+H2O→2C4H5N.HI+C5H5N.HSO4CH3 根据滴定反应中所消耗的卡尔·费休试剂量来算出样品中水份的含量。 二、仪器性能及适应范围: 1、仪器性能: a、测量范围:30×10ˉ6~100%。 b、以水为标样,测定卡尔·费休试剂的水当量,平行测定相对误差≤5%。 c、电源电压:交流220±10%。 2、适应范围: 本仪器主要用于测定化肥、医药、食品、轻工、化工原料以及其它工业产品中的水份含量。 根据资料及美国材料协会标准ASTM,使用卡尔·费休法可直接测定的化合物包括: 有机化合物-饱和的不饱和的碳氢化合物,缩醛、酸类、酰基卤、醇类、稳定的酰、酰胺、弱的胺、酐、二硫化物、酯类、醚卤化物、碳氢化合物,稳定的酮、过氧化物,原酸酯,亚硫酸盐、硫氰酸盐及硫醚等。 无机化合物-酸、酸性氧化物、氧化铝、酐、过氧化钡、碳化钙、氧化铜、干燥剂、硫酸肼、部分有机和无机酸的盐等。 测定水份含量在0.1%-10%时,选用10毫升滴定管(最小分度为0.05毫升)。 测定水份含量<0.1%时,应适当增大取样量并可选用5毫升或2毫升滴定管(最小分度为0.02毫升)。 测定水份含量>10%时,应适当减小取样量并可选用25毫升滴定管(最小分度为0.05毫升)。
快速水分仪标准操作指南 规范快速水分仪的操作方法,使水分仪发挥更大的作用。 一、快速水分仪结构图示 二、适用范围 本水分仪适用于一切需要快速测量水分的行业,如医药、粮食、烟草、化工、茶叶、食品、纺织、农历等。该仪器可与计算机通讯,,并通过计算机把测试水分数据结果打印出来,也可以通过选配的打印机把测试水分数据结果打印出来。 三、工作原理 采用干燥失重法原理。在干燥过程中,快速水分测定仪持续测量并即时显示样品丢失的水分含量%,干燥程序完成后,最终测定的水分含量值被锁定显示。与国际烘箱加热法相比,混合加热可以在高温下将样品均匀地快速干燥,样品表面不易受损,其检测结果与国标烘箱法具有良好的一致性,具有可替代性,且检测效率远远高于烘箱法。智能化操作,一般样品只需几分钟即可完成测定,是一种新型的快速检测仪器。 四、操作方法 A、开机 开箱后,检查配件是否遗漏。然后把仪器连上220v交流电源,掀开加热装置,在样品仓内依次放入三角支架、托架、样品盘,再打开仪器电源开关,仪器进入自检状态(9,8,7,6……)。注意,仪器第一次使用时,应该预热半小时。 B、准备样品 准备好待测样品,大颗粒状的固体样品应该处理成粉状或小条状。 C、测试步骤 在测试前,应根据厂家提供的测试条件,提前设置好温度、时间等参数。然后取适量的
处理过的样品,均匀的平铺于样品盘中,按“测试”键,仪器开始自动工作。测试完成后,仪器发出响声,提醒操作人已经测试完成,这时按下“显示”键,解除警报。连续按“显示”键,可依次显示“水分值”“现时重量”“初始重量”“测试时间”“判别时间”,可记录数据。 在进行下一次测试之前,需要待仪器冷却到室温后,在进行测试。 D、用注意事项 1.在测定水分过程中,一定要避免震动,加热筒下端缺口不能迎风摆放。 2.测定样品在称量盘中堆积一定要平整,堆积面积尽量布满称盘底面,堆积厚度应尽量薄,利于水分完全蒸发。 3.在测定水分过程中,不能用手去摸加热筒,严禁敲击或直接振动工作台面。 4.由于该仪器称重系统为精密设备,尤其传力部分特别怕重压、冲击,因而在每次取,放称量盘时尽量用托架,若用手进行取,放称量盘应轻取,轻放。 5.测定完成后,马上取下称量盘必须用托架,以免烫手.托架在放入仪器中不应碰到称重支架与称量盘。 6.测定后须待称量盘完全冷却后,再放入下一个试样。 五、相关资质 专利号:2005301013706 《中华人民共和国制造计量器具许可证》MC粤制03000235号; 通过ISO9001:2008质量管理体系认证。
水分测定仪(水分测定仪怎么分类): 能够检测各类有机及无机固体、液体、气体等样品中含水率的的仪器叫做水分测定仪,按测定原理可以分类物理测定法和化学测定法两大类。物理测定法常用的有失重法、蒸馏分层法、气相色谱分析法等,化学测定方法主要有卡尔费休法(Karl Fischer)、甲苯法等,国际标准化组织把卡尔费休(Karl Fischer)方法定为测微量水分国际标准,我们国家也把这个方法定为国家标准测微量水分。 常见的失重法水分仪有卤素水分测定、红外水分测定仪、微波水分测定仪等; 常见的卡尔费休水分测定仪主要有容量法卡尔费休水分测定仪和库仑法(电量法)卡尔费休水分测定仪。 另外还有便携式水份测定仪 红外线水分测定仪: 红外线水分测定仪,采用热解重量原理设计的,是一种新型快速水分检测仪器。水分测定仪在测量样品重量的同时,红外加热单元和水分蒸发通道快速干燥样品,在干燥过程中,水分仪持续测量并即时显示样品丢失的水分含量%,干燥程序完成后,最终测定的水分含量值被锁定显示。与国际烘箱加热法相比,红外加热可以最短时间内达到最大加热功率,在高温下样品快速被干燥,其检测结果与国标烘箱法具有良好的一致性,具有可替代性,且检测效率远远高于烘箱法。一般样品只需几分钟即可完成测定。
仪器操作简单,测试准确,显示部分采用红色数码管,示值清晰可见,分别可显示水分值,样品初值,终值,测定时间,温度初值,最终值等数据,并具有与计算机,打印机连接功能。 水分仪可广泛应用于一切需要快速测定水分的行业,如医药,粮食、饲料、种子,菜籽,脱水蔬菜、烟草,化工,茶叶,食品、肉类以及纺织,农林、造纸、橡胶、塑胶、纺织等行业中的实验室与生产过程中。
注意事项 !使用及保存注意事项 ●仪器在使用过程中不可打开外壳,避免发生烫伤及触电危险。 ●仪器在使用、存放、及运输过程中应避免强烈震动,以免损坏氧化锆 传感器。 ●仪器在存放期间应保持清洁,要防止仪器受潮,进排气嘴应加盖防尘 帽,以防落入异物及灰尘。 请严格遵守注意事项,否则将造成人为测量误差或重大事故!!! 服务与保证
仪器自出厂之日起,仪器的保修期限为一年。凡在此期限内,工作人员在正常操作的情况下,仪器出现的软件或硬件的故障,我公司均负责免费维修及更换零部件。若由于工作人员违反操作规程、不严格按照使用说明操作仪器以及由于不可抗拒的因素而对仪器造成的损坏,我公司不负责免费维修。如需维修,我公司将根据损坏情况适当收取维修成本费用。 如有用户需要,我公司也可指派技术人员进行现场培训。 如果您对本公司的仪器在使用和操作过程中,还有什么疑问及要求请及时与我们联系,以便我们能给您提供更完善的服务。联系方式见封底。 一、概述
该氧分析仪是利用氧化锆氧浓度差电池作为检测传感器的氧量分析仪器。该仪器测控系统采用了最新型的单片机计算与控制系统,LED显示器;具有技术先进、精度高、响应快、性能稳定、功能齐全、操作方便、气体分析过程连续等特点;它不仅可测量锅炉燃烧过程中残余氧量,而且可以用于热力学研究,气体制造厂氧含量的连续监测、均热炉燃烧过程中的控制、化工、冶金、电子工业、医疗等方面的气体中氧含量的检测。 本公司生产的测量氧探头分为中温型、低温型、高温型,其基本参数及使用性能如下表1所示: 二、工作原理 2.1氧化锆原理图
仪器的工作原理如图1.0所示。它主要由气路系统、氧化锆传感器、微机测控系统三部分组成。 图1.0 测量原理框图 2.2氧化锆传感器 氧化锆传感器是由氧化锆陶瓷材料制成的氧浓度差电池,在高温时氧化锆具有氧离子的传导特性,当氧化锆管的两个电极之间的氧分压不同时,氧浓度差电池产生一个与氧浓度成比例的电势,电势大小按下式计算: E = ln 式中:R ——理想气体常数 F ——法拉第常数 T ——氧化锆加热炉绝对温度(K) n——电极反应的电子交换数目 P 0 ——空气中氧分压(20.9%) P ——样气中的氧分压 通过测量氧浓度差电池的电动势E 与温度T ,就可以计算出样气中的氧分压,即氧含量。浓度差电池的各种干扰电势,如本底电势、渗透效应、 RT 2n P 0 P
声明: 本文来自 另外,将68013制作逻辑分析仪的原理说明简单整理了一下,大家可以看看,如果想DIY也就不难了。点击此处下载ourdev_578200.pdf(文件大小:203K)(原文件名:逻辑分析仪开发手册.pdf) 前言 一、什么是逻辑分析仪 二、使用介绍 三、安装说明 四、Saleae软件使用方法 五、逻辑分析仪硬件安装 六、使用Saleae分析电视红外遥控器通信协议 七、使用Saleae分析UART通信 八、使用Saleae分析IIC总线通信 九、使用Saleae分析SPI总线通信 十、Saleae逻辑分析仪使用问题和注意事项 https://www.doczj.com/doc/4816723794.html,/item.htm?id=6293581805
淘宝地址:https://www.doczj.com/doc/4816723794.html,/item.htm?id=6293581805 (原文件名:21.jpg) 前言: 工欲善其事,必先利其器。逻辑分析仪是电子行业不可或缺的工具。但是由于一直以来,逻辑分析仪都属于高端产品,所以价格居高不下。因此我们首先要感谢Cypress公司,提供给我们68013这么好的芯片,感谢俄罗斯毛子哥将这个Saleae逻辑分析仪开源出来,让我们用平民的价格,就可以得到贵族的待遇,获得一款性价比如此之高的逻辑分析仪,可以让我们在进行数字逻辑分析仪的时候,快速查找并且解决许多信号、时序等问题,进一步提高我们处理实际问题的能力。 原本计划,直接将Saleae的英文版本使用手册直接翻译过来提供给大家,我花费半天时间翻译完后,发现外国人写的东西不太符合我们国人的思维习惯,当然,也是由于我的英语水平有限,因此,我根据自己摸索这个Saleae的过程,写了一份个人认为符合中国人习惯的Saleae,提供给大家,希望大家在使用过程中少走弯路,快速掌握使用方法,更快的解决自己实际遇到的问题。 由于个人水平有限,因此在文章撰写的过程中难免存在问题和错误,如果有任何问题,希望大家能够提出来,我会虚心接受并且改进,希望通过我们的交流,给越来越多的人提供更加优秀的资料,共同进步。 一、什么是逻辑分析仪: 逻辑分析仪是一种类似于示波器的波形测试设备,它通过采集指定的信号,并通过图形或者数据统计化的方式展示给开发人员,开发人员通过这些图形化时序信号按照协议来分析硬件或者软件中的错误。逻辑分析仪是设计中不可缺少的设备,通过它,可以迅速定位错误,发现并解决问题,达到事半功倍的效果,尤其在分析时序,比如1wire、I2C、UART、SPI、CAN等数据的时候,应用逻辑分析仪解决问题非常快速。 如果在你的工作中有数字逻辑信号,你就有机会使用逻辑分析仪。因此应选好一种逻辑分析仪,既符合所用的功能,又不太超越所需的功能。用户多半会找一种容易操作的仪器,它在功能控制上操作步骤较少,菜单种类也不多,而且不太复杂。而Saleae就是一种低端的,比较适合大众化的逻辑分析仪,价格便宜,而且常用的逻辑分析功能足够,人机界面人性化,非常适合实用。 以下是一个Saleae分析I2C时序的一个典型例子:从图中我们可以清晰的看到,起始信号start,从地址是0x50的器件中去读取数据,第一个字节是0xc0,第二个字节是0x50,有了逻辑分析仪,我们可以快捷的找出我们的I2C时序读写数据的正确与否,可以很快将问题解决。后边的讲解中,我会详细讲解逻辑分析仪分析红外遥控器,UART时序,I2C 时序的具体方式方法。
一、仪器的用途 本仪器可供工矿企业、农业、科研机构的试验室需要对化工、制药原料、燃料、成品、半成品、颗粒或粉状及谷物、土壤、造纸、食品、茶叶等所含的游离水分进行测试,它们的含水量大多是一项重要的技术经济指标,Sh10A型烘干法水分测定仪对于试样能够经受红外线辐射波照射而不至于被挥发或分解的物质均能使用本仪器,并能及时指导生产。 二、主要技术参数 最大载荷10g 定时器范围0~30min 微分标尺分度值5mg 恒温精度±2℃ 微分标尺读数范围0~1g 秤盘直径φ100mm 准确度等级一级电源及功耗220V/50Hz 260W 调温范围80~160℃外形尺寸28×37.5×56cm 重量(净量)12kg 三、仪器原理与结构 Sh10A型烘干法水分测定仪是根据称重法和烘箱法原理设计,将物质在烘干前和烘干后的质量进行比较,以得到物质内所含水分的百分比。本仪器由单盘上皿式天平、红外线干燥箱及电器控温三大部件组成,天平的秤盘置于红外线干燥箱内,当试样物质受穿透性强的红外线辐射波热能后,游离水分迅速蒸发,当试样物中的游离水分充分蒸发后,通过天平的光学投影装置,可直接读出试样物质含水率的百分比。烘干速度快,重复性好,控温电路采用半导体热敏电阻及可控硅控温线路,其升温速度快,恒温性能好,电网电压波动时对温度变化影响小,该仪器还装有定时器及报警装置,操作简单。 图一、图二、图三为仪器结构示意图。
1. 投影屏11.支架21.光学柱 2. 控温旋钮12.横梁22.秤盘 3. 定时旋钮13.大平衡螺母23.秤盘架 4. 电源开关14.指针24.小平衡螺母 5. 垫脚15.光源灯座25加码盘 6. 水平调整脚16.光源灯支架26.阻尼片 7. 水准器17.集光镜 8. 天平开关旋钮18.微分标尺 9. 电源插头19.物镜筒 10.重心铊20.上三棱镜
前面板:部件的名称和功能
按键 工作通道/迹线区 用于选择工作通道和迹线的一组按键。 输入区 E5061B 的前面板上提供了用于输入数字数据的一组按键。
仪器状态区 与宏程序功能、存储和调用功能、控制/管理功能以及预设 E5061B(将其返回到预设状态)相关的一组按键。
标记/分析区 用于通过使用标记等来分析测量结果的一组按键。 浏览区(前面板上没有标签) 浏览区中的按键和旋钮用于在功能键菜单、表格(极限表、分段表等)或对话框中的选定(高亮显示的)区域中进行浏览,以及通过增加或减少来更改数据输入区域中的数值。当使用屏幕上显示的浏览区按键,从两个或多个对象(功能键菜单、数据输入区域等)中选择一个要操纵对象的时,首先按输入区中的 Foc(聚焦)键,以选择要操纵的对象(将焦点置于该对象上),然后操纵浏览区按键(旋钮),在选定(高亮显示)的对象之间移动或更改数值。
下面的描述说明了当焦点在功能键菜单上时和当焦点在数据输入区域中时浏览区按键的作用。有关操纵表和对话框的更多信息,请参考所有这些功能的操纵步骤。 ?焦点位于功能键菜单上时(已选择功能键菜单) 旋钮 (顺时针旋转或 逆时针转动) 上下移动对功能键的选择(高亮显示)。 上/下 箭头键 上下移动对功能键的选择(高亮显示)。 右箭头键 显示上一层功能键菜单。 左箭头键 显示下一层功能键菜单。 Enter或 旋钮(按下) 执行选定功能键的功能。 ?焦点位于数据输入区域中时(已选择数据输入区域) 旋钮 (顺时针旋 转或逆时针 转动) 以小步长增加或减少数据输入区域中的数值。 上/ 下箭头键 以大步长增加或减少数据输入区域中的数值。 左/右箭在数据输入区域来回横向移动光标 键一起使用,以一次更改一个字符的方式更改数据。
HZX-FX-Y020 气体分析仪使用说明书 汇众翔环保科技
目录 一、用户需知 (1) 二、简介及应用领域 (1) 2.1简介 (1) 2.1.1基本形式 (1) 2.1.2 仪器特点: (1) 2.2仪器结构 (2) 2.2.1仪器部气路图 (2) 2.2.2仪器面板按键 (3) 2.2.3仪器后面板图 (3) 2.2.4仪器外形尺寸 (4) 2.2.5仪器信号输出插头接点说明 (4) 2.3应用领域 (5) 三、工作原理 (6) 3.1红外测量原理 (6) 3.2氧测量原理 (6) 3.3主要技术参数 (7) 3.3.1技术参数 (7) 3.3.2氧气测量技术参数 (7) 3.3.3仪表参数 (8) 四、仪器的安装 (8) 4.1开箱检查 (8) 4.2仪器的安装 (8) 五、仪器启动 (8) 5.1启动运行步骤 (8) 5.2操作面板及说明 (9) 5.3显示画面的概要 (9) 5.4基本操作 (10) 六、设定及校正 (10) 6.1量程切换 (10) 6.1.1量程切换方法的设定 (10) 6.1.2手动量程的切换 (11) 6.2校正设定 (11) 6.3报警设定 (12) 6.3.1报警值的设定 (12) 6.3.2滞后的设定 (12) 6.4自动校正的设定 (12) 6.4.1自动校正 (12) 6.4.2自动校正的强制执行及中止 (13) 6.5简易零点校正的设定 (13) 6.5.1简易零点校正 (13) 6.5.2简易零点校正的强制执行及中止 (13)
6.6参数的设定 (13) 6.6.1设定项目的说明: (14) 6.6.2设定围 (14) 6.6.3保持动作 (14) 6.6.4设定值的意义 (15) 6.6.5设定项目的说明 (15) 6.6.7响应速度 (15) 6.6.8平均时间设定 (15) 6.6.9平均值复位 (15) 6.6.10显示灯熄灭 (16) 6.6.11对比度 (16) 6.6.12维护模式 (16) 6.7维护模式 (16) 6.8校正 (19) 6.8.1 零点校正 (19) 6.8.2 量程校正 (20) 七、维护 (20) 7.1 日常检查 (20) 7.2 日常检查维护要领 (21) 7.3 关于长期维护品 (21) 7.4试样气室的清洁 (22) 7.5分析部的保险丝更换方法 (23) 八.故障信息 (23) 8.1发生故障时的处理方法 (24) 8.2发生故障时的画面显示及操作 (25) 8.3故障记录文件 (26)
keil的软件逻辑分析仪(logic analyzer)使用教程 在keil MDK中软件逻辑分析仪很强的功能,可以分析数字信号,模拟化的信号,CPU的总线(UART、IIC等一切有输出的管脚),提供调试函数机制,用于产生自定义的信号,如Sin,三角波、澡声信号等,这些都可以定义。 以keil里自带的stm32的CPU为例,对PWM波形跟踪观测,打开 C:\Keil\ARM\Boards\Keil\MCBSTM32\PWM_2目录下的stm32的Dome,第一步:进行仿真配置,如图: (原文件名:1.jpg) 把开工程中的Abstract.txt文件有对工程的描述,PWM从PB0.8和PB0.9输出,稍后将它加入软件逻辑分析仪里。 The 'PWM' project is a simple program for the STM32F103RBT6 using Keil 'MCBSTM32' Evalua tion Board and demonstrating the use of PWM (Pulse Width Modulation) with Timer TIM4 . Example functionality: - Clock Settings: - XTAL = 8.00 MHz - SYSCLK = 72.00 MHz - HCLK = SYSCLK = 72.00 MHz - PCLK1 = HCLK/2 = 36.00 MHz - PCLK2 = HCLK = 72.00 MHz - ADCLK = PCLK2/6 = 12.00 MHz
- SYSTICK = HCLK/8 = 9.00 MHz - TIM4 is running at 100Hz. LEDs PB8, PB9 are dimmed using the PWM function of TIM4 channel3, channel4 The Timer program is available in different targets: Simulator: - configured for software Simulator MCBSTM32: - runs from Internal Flash located on chip (used for production or target debugging) 第二、选择软件仿真 (原文件名:2.jpg)
红外线水份测定仪说明书 首先感谢您选用本公司生产的《冠亚牌》快速水分测定仪。请您在使用前详细阅读本说明书,如有疑问,可与本公司取得联系。 一、用途、特点 《冠亚牌》SFY-20E红外线水份测定仪,是一种新型快速水分测定仪器,可用来测定任何物质的水分含量(通过加热发生危险化学反应的物质除外),该仪器采用热解重量设计原理,仪器测量样品重量的同时,加热单元和水分蒸发通道快速干燥样品.在干燥过程中,仪器持续测量并即时显示干燥过程中样品丢失的水分含量%,干燥完成后,最终测定的水分含量锁定,按显示键可显示水分值、重量初始值、现时值、测试时间等数据.与传统的烘箱加热法相比,新型加热装置可在最短时间达到最大加热功率,可使样品在高温下快速被干燥,大大减少了测定时间.该仪器可用于一切需要快速准确测量水分的行业。 二、SFY-20E红外线水份测定仪技术参数 1、称重范围:0-90g 2、水分测定范围:0.01-100% 3、样品质量:0.1-90g 4、加热温度范围:起始-205℃ 加热方式:可变混合式加热微 调自动补偿温度最高15℃5、水分 含量可读性:0.01% 6、显示参数:7种 红色数码管独立显示模式 7、外型尺寸:380×205×325(mm)
8、电源:220V±10% 9、频率:50Hz±1Hz 10、净重:3.7Kg 三、红外线水份测定仪仪器特点 检测速度快,只需几分钟,创行业之最; 采用最新一代传感技术,快速、简便,一键式操作; 操作简单,全自动操作模式,无可动部件; 关键零部件均采用纯进口高端材料,以保证产品检测结果的准确性; 零易损件,样品盘采用耐酸耐碱耐变形的纯不锈钢材料,无易耗品,样品盘克循环利用; 采用特质的环形卤素光源,加热均匀,加热器更耐用; 四、键盘操作(主要按键操作) 1、校准 该校准功能是专门用来校准称重系统的,显示窗零位状态下,按“校准”键,仪器显示“—20—”,此时把20克砝码放到称量盘上,等待几十余秒,直到仪器显示砝码重量(即20.000或20.00),此时校准完成。 2、置零
网络分析仪使用手册 目录 ACTIVE CH/TRACE Block: Channel Prev:选择上一个通道 Channel Next:选择下一个通道 Trace Prev:选择上一个轨迹 Trace Next:选择下一个轨迹RESPONSE Block: Channel Max: 通道最大化 Trace Max: 轨迹最大化 Meas: 设置S参数 Format: 设置格式 Scale: 设置比例尺 Display: 设置显示参数 Avg: 波形平整 Cal: 校准 STIMULUS Block: Start: 设置频段起始位置 Stop: 设置频段截止位置 Center: 设置频段中心位置 Span: 设置频段范围 Sweep Setup: 扫描设置 Trigger: 触发 NAVIGATION Block: Enter: 确定 ENTRY Block: Entry off: 取消当前窗口 Back space: 退格键 Focus: 窗口切换键 +/-: 正负切换键 G/n, M/,k/m: 单位输入 INSTR STATE Block: Macro Setup: Macro Run: Macro Break: Save/Recall: 程序载入载出键 System: 系统功能键 Preset: 预设置键 MKR/ANALYSIS Block: Marker: 标记键 Marker Search: 标记设置键 Marker Fctn: 标记功能 Analysis: 分析 部分按键详细功能: ------------------------------------------------------------ System: (系统功能设定) Print: 将显示屏画面打印出来 Abort printing: 终止打印 Printer setup: 配置打印机 Invert image: 颠倒图象颜色 Dump screen image: 将显示屏画面保存到硬盘中 E5091A setup: 略 Misc setup: 混杂功能 Beeper: 发声控制 Beeper complete: 开/关提示音 Test beeper complete: 测试开/关提示音 Beep warning: 开/关警告音 Test beep warning: 测试开/关警告音 Return: 返回 GPIB setup: 略 Network setup: 略 Clock setup: 时钟设定 Set date and time: 设置日期和时间 Show clock: 开/关时间显示 Return: 返回 Key lock: 锁定功能 Front panel & keyboard lock: 锁定前端面板和键盘 Touch screen & mouse lock: 锁定触摸屏和鼠标