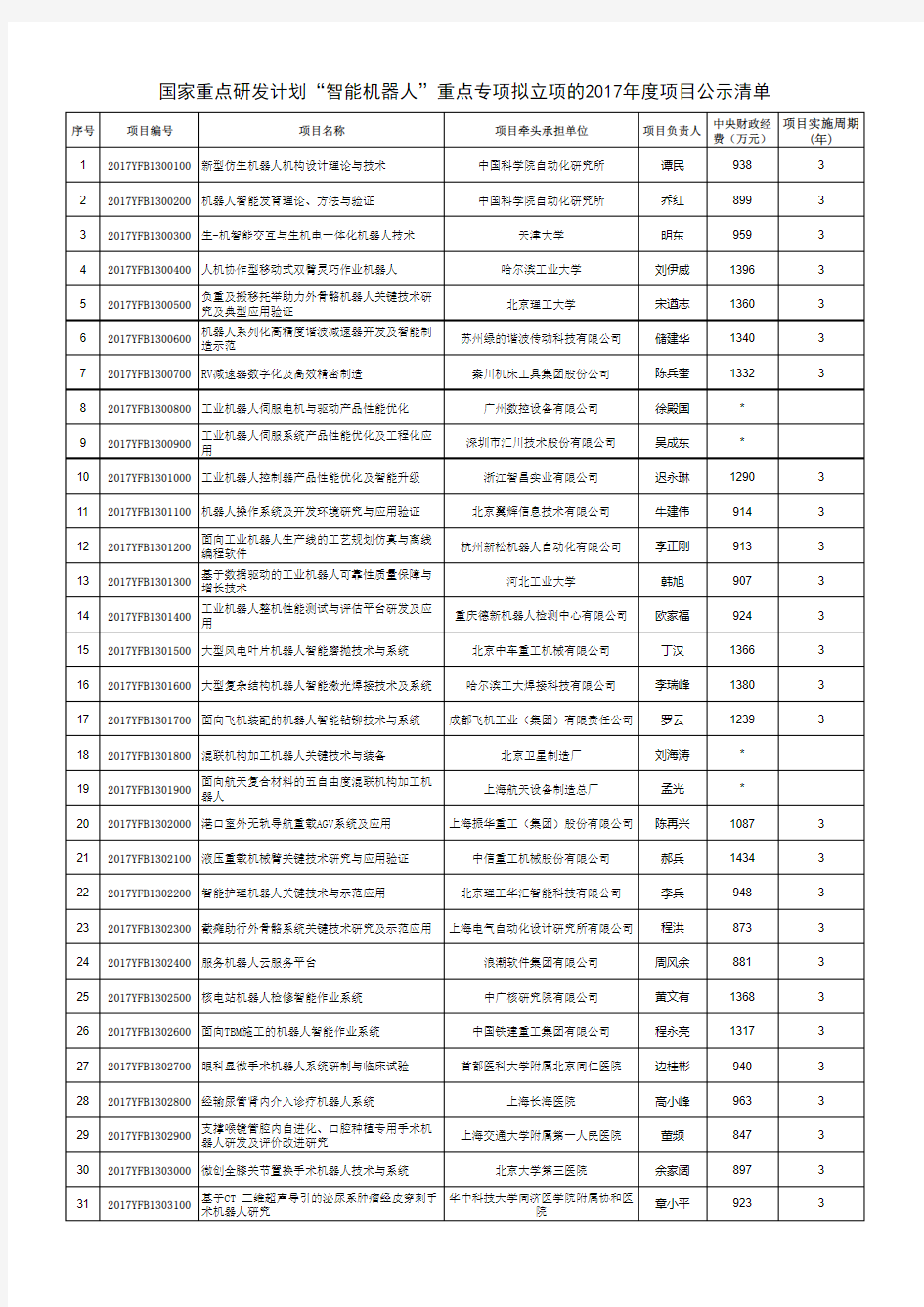
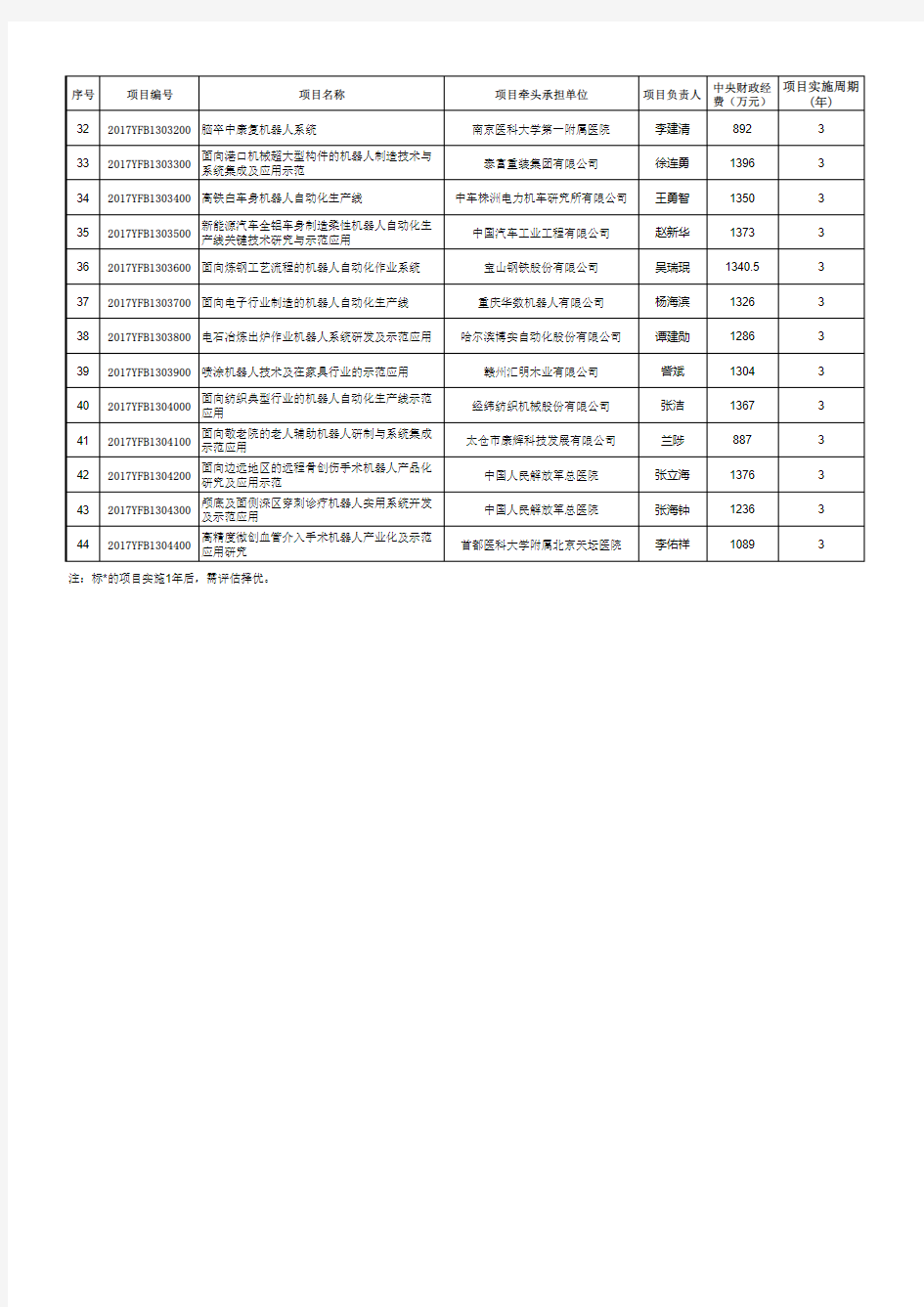
国家重点研发计划“智能机器人”重点专项拟立项的2017年度项目公示清单
注:标*的项目实施1年后,需评估择优。
陕西科技大学 2015 级研究生课程考试答题纸 考试科目机械制造与装配自动化 专业机械工程 学号1505048 考生姓名乔旭光 考生类别专业学位硕士
浅谈机器人智能控制研究 摘要:以介绍机器人控制技术的发展及机器人智能控制的现状为基础,叙述了模糊控制和人工神经网络控制在机器人中智能控制的方法。讨论了机器人智能控制中的模糊控制和变结构控制,神经网络控制和变结构控制,以及模糊控制和神经网络控制等几种智能控制技术的融合。并对模糊控制和神经网络控制等方法中的局限性作出了说明。 关键词:机器人;智能控制;模糊控制;人工神经网络 1 智能控制的主要方法 随着信息技术的发展,许多新方法和技术进入工程化、产品化阶段,这对自动控制技术提出崭新的挑战,促进了智能理论在控制技术中的应用,以解决用传统的方法难以解决的复杂系统的控制问题。 智能控制技术的主要方法有模糊控制、基于知识的专家控制、神经网络控制和集成智能控制等,以及常用优化算法有:遗传算法、蚁群算法、免疫算法等。1.1 模糊控制 模糊控制以模糊集合、模糊语言变量、模糊推理为其理论基础,以先验知识和专家经验作为控制规则。其基本思想是用机器模拟人对系统的控制,就是在被控对象的模糊模型的基础上运用模糊控制器近似推理等手段,实现系统控制。在实现模糊控制时主要考虑模糊变量的隶属度函数的确定,以及控制规则的制定二者缺一不可。 1.2 专家控制 专家控制是将专家系统的理论技术与控制理论技术相结合,仿效专家的经验,实现对系统控制的一种智能控制。主体由知识库和推理机构组成,通过对知识的获取与组织,按某种策略适时选用恰当的规则进行推理,以实现对控制对象的控制。专家控制可以灵活地选取控制率,灵活性高;可通过调整控制器的参数,适应对象特性及环境的变化,适应性好;通过专家规则,系统可以在非线性、大偏差的情况下可靠地工作,鲁棒性强。 1.3 神经网络控制 神经网络模拟人脑神经元的活动,利用神经元之间的联结与权值的分布来表
附件: 广州市重点领域研发计划2020年度“人工智能应用场景示范”、“新材料 ”、“重点专项”论证专家名单 一、2020年度“人工智能应用场景示范”重大科技专项 支持方向一:新一代智慧无人机电力巡检应用示范 1组 (一)专家组 序号专家姓名工作单位职称/职务 1陈雪梅国机智能科技有限公司教授级高级工程师/副总经理、总工 程师 2苑明哲广州中国科学院沈阳自动化研究所分 所 研究员/副所长 3杨晓明工业和信息化部电子第五研究所高级工程师/科技处处长4印鉴中山大学教授/主任 5郭治兴广东省生态环境技术研究所研究员/主任 6刘惠君广州大学教授 7吴建武中审华会计师事务所(特殊普通合 伙)广州分所 高级经济师/部门经理(二)评审项目 序号项目名称 1新一代智慧无人机电力巡检应用示范 2智慧无人机电力巡检应用示范 支持方向二:智慧轨道交通应用示范 2组 (一)专家组 序号专家姓名工作单位职称/职务 1陈雪梅国机智能科技有限公司教授级高级工程师/副总经理、总工 程师
2刘妍广州图普网络科技有限公司总监 3印鉴中山大学教授/主任 4杨鹏强广东南华工商职业学院副教授/常务副院长 5杨俊杰广州电力机车有限公司教授级高级工程师/技术副总监6李小夏广州医科大学附属第一医院高级会计师 7邓颂华广东恒永信会计师事务所(普通合 伙) 注册会计师 (二)评审项目 序号项目名称 1城市轨道交通智能运维技术研究与应用示范 2面向城市轨道交通行业的新一代数字化智能运营平台研发及应用示范 支持方向三:智慧疾病诊断应用示范 3组 (一)专家组 序号专家姓名工作单位职称/职务 1徐向民华南理工大学教授/电子与信息学院党委书记2刘甜甜创新奇智(广州)科技有限公司高级工程师/华南区科研负责人5谢国喜广州医科大学教授/副主任 3王存川暨南大学主任医师/副院长4林国桢广州市疾病预防控制中心主任医师/科长 6祝高翔广东创信会计师事务所有限公司注册会计师/所长7何琳仲恺农业工程学院教授 (二)评审项目 序号项目名称
龙源期刊网 https://www.doczj.com/doc/4d1303976.html, 人工智能在智能机器人领域中的研究与运用作者:黄春芳 来源:《科教导刊》2017年第19期 摘要基于智能机器人是人工智能理念实现深度研究目标理想化平台这一实况,文章主要对人工智能在智能机器人领域中的具有应用进行研究,具体是对人工神经网络在机器人定位与导航中的应用,专家系统在机器人控制环节中的应用形式进行分析,希望人工智能在智能机器人领域中获得更大的应用空间。 关键词人工智能智能机器人研究内容应用形式 中图分类号:TP18 文献标识码:A DOI:10.16400/https://www.doczj.com/doc/4d1303976.html,ki.kjdks.2017.07.015 Research and Application of Artificial Intelligence in the Field of Intelligent Robot HUANG Chunfang (Ningbo Dahongying University, Ningbo, Zhejiang 315175) Abstract Intelligent robots based on artificial intelligence concept to achieve this ideal goal live depth research platform, this paper mainly studies on the application of artificial intelligence in the field of intelligent robots, in particular the application of artificial neural network in robot localization and navigation, analysis and application of expert system in the form of robot control links in the hope. The application of artificial intelligence to get more space in intelligent robot. Keywords artificial intelligence; intelligent robot; research content; application form 人工智能(AI)为一门综合性技术学科,主要是对人类智能机理以及计算机模拟人类智能活动运行的形式进行研究。该学科经过几十年的发展,已经取得了许多令人惊叹的成绩,具体是在专家系统、人工神经网络以及多样化智能算法等方面显现出来。智能机器人可以被视为对人整体性模拟的系统,其形态是多样化的,人工智能在智能机器人领域中的应用,为新型人工智能思想与技术的衍生与发展奠定基础。本文笔者在阅览大量文献资料的基础上,对人工智能在智能机器人领域中的具体运用进行探究。 1 列举人工智能的研究内容 1.1 模式识别
智能机器人行业研究报告 一、行业概况 1、行业监管体制、主要法律法规及政策 (1)行业监管 我国现行智能制造装备行业管理体制为国家宏观指导下的市场竞争体制,宏观调控归属于国家发改委、科技部、工信部以及商务部,主要通过研究制定产业政策、提出中长期产业发展导向和指导性意见等履行宏观调控和宏观管理的职能。 我国智能机器人行业自律组织系中国机器人产业联盟,侧重于行业内部自律性管理,中国机器人产业联盟是由中国机械工业联合会联合在中国注册的机器人行业骨干企事业单位、大专院校和科研院所共同发起成立,在发改委、工信部和科技部的指导下,贯彻落实政府部门对机器人行业提出的相关产业政策和要求;研究产业发展状况,为政府部门制定产业政策提供决策支持等。 目前,我国智能机器人行业无准入限制。 (2)行业主要法规与政策 2006年起,国家先后出台多项规范和扶持智能制造装备行业的规划和政策,采取有效的措施,大力支持工业智能机器人及自动化成套生产线行业的发展。 在“十二五”期间,工业智能机器人首次成为发展规划的重点发展对象之一,在国务院、工信部、科技部出台的关于“十二五”期间智能装备领域的发展规划中,均强调要重点开发并突破有关工业机器人及相关零部件等技术,明确了工业机器人及相关零部件的发展方向,上述政策的出台将有助于完善机器人产业链,促进产业快速发展,实现制造业的升级转型。 影响我国智能机器人行业发展的相关规划和政策具体情况如下:
3、行业发展历程 1920年,捷克作家K.凯比克在科幻剧本《罗萨姆的万能机器人》中首次提出了ROBOT这个名词。现在已被人们作为机器人的专用名词。 (1)第一代机器人 20世纪50、60年代,随着机构理论和伺服理论的发展,机器人进入了使用化阶段。1954年美国的G.C.Devol发表了“通用机器人”专利;1960年美国AMF 公司生产了柱坐标Versatran机器人,可做点位和轨迹控制,是世界上第一种用于工业生产上的机器人。 20世纪70年代,随着计算机技术、现代控制技术、传感技术和人工智能技术的发展,机器人行业得到了迅速发展。1974年美国俄亥俄州辛辛那提的Milacron公司成功开发了多关节机器人;1979年,Unimation公司推出了PUMA 机器人,它是一种多关节、全电动驱动、多CPU二级控制的机器人,采用了V AL 专用语言,可搭配视觉、触觉、力感等传感器,在当时是一种技术先进的工业机器人,现在的这hi能机器人结构大体上是以此为基础的。 这一时期的机器人属于“示教再现”(Tech-in/Playback)型机器人,只具有
附件1 广东省重点领域研发计划2019年度 “新一代人工智能”重大专项申报指南 (征求意见稿) 本专项以国家战略和广东省产业发展需求为牵引,围绕人工智能产业发展亟待突破的关键技术领域,集聚国内优势团队组织技术攻关,力争取得一批标志性成果,在部分关键领域实现科技自立。 2019年度新一代人工智能专项共设置基础理论研究及验证、关键共性技术研究及应用、关键处理与感知器件等专题。要求项目须覆盖每个研究方向要求的全部研究内容和考核指标,且成果实施地点在广东省内。项目实施周期为3年。 专题一:基础理论研究及验证 项目1:面向自主智能体感知与协作的计算架构和验证 (一)研究内容 针对自主智能体感知与协作的新型深度计算架构开展研究。针对实时感知与识别、自主控制与协作、动态环境下的自适应任务重构等难题,突破实时目标检测算法、多智能体协作、智能计算芯片系统结构设计等关键技术。研究低功耗、强实时的软硬件
协同解决方案;研究基于语义地图的情境理解和多智能体协作等核心技术;完成基于认知计算模型的人工智能原型芯片设计,面向多智能协同任务的原理验证系统。可支持智慧物流、智慧社区、智慧安防等领域。 (二)考核指标 项目中完成的面向自主智能体感知与协作的计算架构研究成果,须以原型智能计算芯片为载体,该芯片其峰值算力不低于12.8TOPs,执行效率不低于70%,部分网络不低于80%;单芯片支持不低于8路的1080P@60Hz目标检测任务;基于该原型芯片构建自主智能体数目≥10个、种类≥2类的多智能体协同验证系统;验证系统围绕混合增强智能、机载实时处理、空地联合感知协作、动态环境任务自适应重构等关键技术开展集成验证,达到低能耗、高实时、强适应的要求;项目执行期内在自主智能体领域取得不少于3个应用,完成新申请发明专利≥8项(其中至少包含1项国际发明专利),研制并发布实施团体标准2项,集成电路保护布图1项。 项目2:基于混合增强智能的平行智能理论研究及验证 (一)研究内容 本方向是平行智能理论体系下的机器智能进行系统性研究。研究提升机器理解并适应真实世界环境、完成复杂时空关联任务的能力;研究基于认知计算的混合增强智能,探索直觉推理与因果模型、记忆和知识演化的可计算框架;研究人机协同的感知与-2-
附件1 任务分工表 序号重点任务主要措施时间节点牵头部门配合部门 1 (一)基础创新 提升行动实施重点领域研发计划。围绕人工智能关键技术重点领域组织实施 重大科技专项。强化部、省、市联动,主动对接国家、省重大科技 专项在我市布局并实现成果落地转化。 2022年持续推进。市科技局 市工业和信息化 局 2 创建国家级人工智能创新试验区。加快人工智能与数字经济广东省 实验室建设,对承担国家重大项目的企业按规定给予配套支持。支 持加快建设科大讯飞机器人智能交互平台、佳都科技智慧交通平 台、云从科技人机协同平台、欧派智能设计与制造平台等广东省新 一代人工智能开放创新平台。支持在图像识别、智能产品研发、智 能制造等关键领域建设人工智能开放创新平台。支持建设一批人工 智能工程技术研究中心、企业技术中心、新型研发机构等创新载体。 依托国家超算广州中心的“天河二号”系统,为深度神经网络模型 训练、基因测序等产业应用场景提供算力支撑。 2020年,申报创建国家 级人工智能创新试验 区,人工智能与数字经 济广东省实验室挂牌成 立;2021-2022年持续 推进。 市科技局 市工业和信息化 局、市财政局,各 区政府
序号重点任务主要措施时间节点牵头部门配合部门 3 (二)产业培育组织实施“强芯”工程,加大集成电路设计、专用设备制造、检验 检测等关键环节的支持力度,引领带动人工智能产业发展。面向5G (第五代移动通信)、物联网、汽车电子、智能终端等领域,引进 和培育一批具有自主知识产权、具有行业影响力的集成电路设计企 业。积极创建国家级“芯火”双创基地(平台),支持公共技术服 务、检测及认证服务等平台建设。 2020年,重点引进一批 集成电路骨干企业; 2021-2022年持续推进。 市工业和信息 化局 —— 4 加快推进国家印刷及柔性显示制造业创新中心建设,培育发展高档 数控机床及关键功能部件、机器人、智能网联汽车、智能家电等广 东省制造业创新中心,推动半导体智能装备和系统集成、智能终端 等省级制造业创新中心筹建。组织实施虚拟现实应用示范项目,积 极创建国家级综合型信息消费示范城市,支持虚拟现实产品、可穿 戴类、公共服务类、行业应用类智能产品研发创新。 2020年,推动半导体智 能装备和系统集成、智 能终端等省级制造业创 新中心筹建;2021-2022 年持续推进。 市工业和信息 化局 市科技局 5 推进广州北斗产业园建设。2020-2022年持续推进。市发展改革委、 市工业和信息 化局 ——
家用机器人的人工智能研究 08网络一班李晨08205050120 1 引言 家用电器技术的发展是一个国家科技水平和工业自动化程度的重要桥志和体现,家用电器自动化应用越来越广泛,但是家用电器的自动化的发展现只能是起步阶段,还没有达到能得心应手的阶段,其实,可以认为是不动机器人,它通过嵌入式软件操作,通过传感器感知,通过网络与用户交流。此技术综合了计算机,控制论、机械学,信息和传感技术,人工智能、仿生学等多学科而形成的高新技术,集成许多学科的发展成果,代表高技术的发展是科技研究的随着计算机、电子信息技术的快速进步.家电控制技术的开发速度越来越快,智能度越来越高,它是动态决策与规划、行为控制与执行等多功能于一体的综合系统,是一类能够通过传感器感知环境和自身状态调节家电状态的智能系统。 自动目标识别框架算法的优化和调整,必须采用可视化界面设计,同时提供设计选择和改进优化的机会.系统显示的界面部分是由一些内容相互联系的模块所组成,每个模块代表一个分离的子系统.框架应能够对全部或部分程序进行优化处理,应尽可能多地增加新的优化算法到框架中.框架可以为算法开发者提供在线帮助,以熟悉操作界面和框架的使用.框架应充分利用己有的面向对象程序设计的设计环境,那些用于向导的设计选择可以嵌入到继承的结构中,应易于通过产生导出类或添加界面的方式扩展系统.框架采用模块化设计,通过相对独立的模块设计.根据面向对象程序设计的特点,设计者的大部分工作是编写程序,通过使用已有的对象导出新的对象,并且把它们融合在一起,这项工作主要是利用了继承性扩展函数来完成. 2 基于简目标自动识别框架结构 由于是实验的初级阶段,本文提出了一个层次化、模块化的自动目标优先框架方案,利用层次化识别的原理,将一个多类别的复杂识别问题分解成在不同层次上对多层系统变成的简单识别问题,使得识别系统在不同层次上可以灵活地采用相应的特征提取与目标识别算法;而增加新的识别类型时,也只需要对局部的系统结构或参数进行调整.另外,一个实用的自动目标识别系统通常需具备数
智能机器人的发展与应用前景 摘要 本文介绍了智能机器人的发展概况、机器人的感官系统、机器人运动系统及人工智能技术在机器人中的应用,智能机器人是一个在感知-思维-效应方面全面模拟人的机器系统,外形不一定像人。它是人工智能技术的综合试验场,可以全面地考察人工智能各个领域的技术,研究它们相互之间的关系。还可以在有害环境中代替人从事危险工作、上天下海、战场作业等方面大显身手。 关键词: 智能机器人感官仿生人工智能 1.引言 人们通常把机器人划分为三代。第一代是可编程机器人。这种机器人一般可以根据操作人员所编的程序,完成一些简单的重复性操作。这一代机器人是从60年代后半叶开始投入实际使用的,目前在工业界已得到广泛应用。第二代是“感知机器人”,又叫做自适应机器人,它在第一代机器人的基础上发展起来的,能够具有不同程度的“感知”周围环境的能力。这类利用感知信息以改善机器人性能的研究开始于70年代初期,到1982年,美国通用汽车公司为其装配线上的机器人装配了视觉系统,宣告了感知机器人的诞生,在80年代得到了广泛应用。第三代机器人将具有识别、推理、规划和学习等智能机制,它可以把感知和行动智能化结合起来,因此能在非特定的环境下作业,称之为智能机器人。智能机器人与工业机器人的根本区别在于,智能机器人具有感知功能与识别、判断及规划功能。而感知本身,就是人类和动物所具有的低级智能。因此机器的智能分为两个层次:①具有感觉、识别、理解和判断功能; ②具有总结经验和学习的功能。所以,人们通常所说的第二代机器人可以看作是第一代智能机器人。 2.智能机器人的感官系统 2.1触觉传感器 英国近几年在阵列触觉传感方面开展了相当广泛的研究。例如:Sussex大学和Shack-leton系统驱动公司研制的基于运动的介电电容传感的阵列;由威尔士大学和软件科学公司研制的采用压强技术的装在机器人夹持器上的传感器。 2.2视觉传感 在机器人视觉方面,目前市场上销售的有以下6类传感器:①隔开物体的二维视觉:双态成像;②隔开物体的二维视觉:灰度标成像;③触觉或叠加物体的二维视觉;④二维观察;⑤二维线跟踪;⑥使用透视、立体、结构图示或范围找寻技术从隔开物体中提取三维信息。在这类系统方面,它们只能做一些很简单的操作。例如:为了使机器人具有某种程度的人眼功能,已进行大量的研究工作并向如下两类系统发展:①从一维物体中提取三维信息;②活动机器人导航、探路和躲避障碍物的现场三维分析。伦敦大学目前正在研究一种双目视觉机器人的实时图像处理机。还有正在研究机器人视觉系统的教育机构有:考文垂工业大学、爱丁堡大
浅谈人工智能学习研究的现状 及其发展趋势 摘要:自上世纪五十年代以来,经过了几个阶段的不断探索和发展,人工智能在模式识别、知识工程、机器人等领域已经取得重大成就,但是离真正意义上的的人类智能还相差甚远。但是进入新世纪以来,随着信息技术的快速进步,与人工智能相关的技术水平也得到了相应的提高。尤其是随着因特网的普及和应用,对人工智能的需求,变得越来越迫切,也给人工智能的研究提供了新的更加广泛的舞台。本文强调在当今的网络时代,作为信息技术的先导,人工智能学习在人工智能科学领域中是一个着非常值得关注的研究方向,要在学科交叉研究中实现人工智能学习的发展与创新,就要关注认知科学、脑科学、生物智能、物理学、复杂网络、计算机科学与人工智能之间的交叉渗透点,尤其是重视认知物理学的研究。自然语言是人类思维活动的载体,是人工智能学习研究知识表示无法回避的直接对象,要对语言中的概念建立起能够定量表示的不确定性转换模型,发展不确定性人工智能;要利用现实生活中复杂网络的小世界模型和无尺度特性,把网络拓扑作为知识表示的一种新方法,研究网络拓扑的演化与网络动力学行为,研究网络化了的智
能,从而适应信息时代数据挖掘的普遍要求,迎接人工智能学习与应用领域新的辉煌。 1.前言 自20世纪90年代以来,随着全球化的形式与国际竞争的日益激烈,对人工智能技术的研究与应用变的越来越被人们关注,且人工智能在制造中的运用以成为实现制造的知识化、自动化、柔性化以实现对市场的快速响应的关键。 人工智能已对现实社会做出了非常重大的贡献,而且其作用已在各领域发挥得淋漓尽致,特别是在计算机领域,人工智能的应用更加突出,可以说,哪里有计算机应用,哪里就在应用人工智能;哪里需要自动化或半自动化,哪里就在应用人工智能的理论、方法和技术。目前,人工智能应用的主要领域,也就是计算机应用的主要领域。 人工智能是一门研究人类智能的机理以及如何用机器模拟人的智能的学科。从后一种意义上讲,人工智能又被称为“机器智能”或“智能模拟”。人工智能是在现代电子计算机出现之后才发展起来的,它一方面成为人类智能的延长,另一方面又为探讨人类智能机理提供了新的理论和研究方法。 学习机制的研究是人工智能研究的一项核心课题。它是智能系统具有适应性与性能自完善功能的基础。学习过程具
2019-2020年度广东省重点领域研发计划“智能机器人和装备制造”重大专项申报指南(征 求意见稿) 为贯彻省委、省政府关于推进制造强省建设的工作部署,广东省启动实施“智能机器人和装备制造重大专项”,现发布2019-2020年度项目指南。 本专项实施目标是:一是突破智能机器人感知、人机协作、智能控制系统等核心技术,提高机器人及装备制造核心零部件等关键零部件的技术水平,提升国产机器人的竞争力;二是攻克高精度数控机床、智能型五轴精密小龙门数控加工中心等智能制造设备,提升国产工业母机的竞争力,推进国产智能装备的产业化及创新应用。本专项实施期3年。 2019-2020年,本专项按照“围绕产业链部署创新链”的要求,从补短板、突破卡脖子技术方面对智能机器人与装备制造核心关键技术、关键核心零部件、高端数控机床/数控加工中心、海洋及爬行焊接机器人系统等启动10个项目。除特别说明外,每个项目原则上支持一项;技术路线明显不同而又在评审中排前两位时,可都纳入并行支持;评审专家经评议认为项目申报质量都未达指南研发内容和指标要求时,可都不支持。 专项统一以项目为单位申报,项目实施一般为3年,研究内容除特别说明外必须涵盖该项目下所列的全部内容,项目
完成时应完成该项目下所列所有考核指标。每个项目参研单位总数不超过6个。每个项目设1名项目负责人。为充分调动社会资源投入相关研发工作,鼓励企业与高校、科研院所以产学研合作形式联合申报。 专题一:智能机器人核心、关键技术 项目1:人机协作机器人的研发及产业化 研究内容:开发集谐波减速器、伺服电机、编码器、传感器及伺服驱动于一体的一体化关节单元;研发动态轨迹规划、动力学智能控制、无力矩传感器碰撞感知、自主学习编程等协作机器人核心算法,开发协作机器人专用控制器;开发3D智能视觉系统,兼顾速度、精度及测量范围,完成作业空间快速三维重建,将眼脑智能引入协作机器人安全、自主作业;建立协作机器人整机评价实验室及评价体系,制定协作机器人相关技术标准;开发典型协作机器人系列产品、柔性软件平台以及工艺软件包,并在典型行业实现示范应用。 考核指标:研制出具有自主知识产权的一体化关节单元、控制器、3D智能视觉系统以及系列化的人机协作机器人产品,人机协作机器人不少于6自由度、重量≤25kg、工作半径≥800mm、负载≥5kg、关节速度≥180°/s、重复定位精度≥±0.1mm、碰撞检测精度≤20N,建立人机协作机器人整机评价实验室,制定技术标准3项以上,申请发明专利5件以上,开发柔性软件平台,并实现2种以上示范应用。
本页面为作品封面,下载文档后可自由编辑删除!
人工智能学习研究的现状 及其发展趋势 摘要:自上世纪五十年代以来,经过了几个阶段的不断探索和发展,人工智能在模式识别、知识工程、机器人等领域已经取得重大成就,但是离真正意义上的的人类智能还相差甚远。但是进入新世纪以来,随着信息技术的快速进步,与人工智能相关的技术水平也得到了相应的提高。尤其是随着因特网的普及和应用,对人工智能的需求,变得越来越迫切,也给人工智能的研究提供了新的更加广泛的舞台。本文强调在当今的网络时代,作为信息技术的先导,人工智能学习在人工智能科学领域中是一个着非常值得关注的研究方向,要在学科交叉研究中实现人工智能学习的发展与创新,就要关注认知科学、脑科学、生物智能、物理学、复杂网络、计算机科学与人工智能之间的交叉渗透点,尤其是重视认知物理学的研究。自然语言是人类思维活动的载体,是人工智能学习研究知识表示无法回避的直接对象,要对语言中的概念建立起能够定量表示的不确定性转换模型,发展不确定性人工智能;要利用现实生活中复杂网络的小世界模型和无尺度特性,把网络拓扑作为知识表示的一种新方法,研究网络拓扑的演化与网络动力学行为,研究网络化了的智能,从而适应信息时代数据挖掘的普遍
要求,迎接人工智能学习与应用领域新的辉煌。 / 、八— 1. 前言 自20 世纪90 年代以来,随着全球化的形式与国际竞争的日益激烈,对人工智能技术的研究与应用变的越来越被人们关注,且人工智能在制造中的运用以成为实现制造的知识化、自动化、柔性化以实现对市场的快速响应的关键。 人工智能已对现实社会做出了非常重大的贡献,而且其作用已在各领域发挥得淋漓尽致,特别是在计算机领域,人工智能的应用更加突出,可以说,哪里有计算机应用,哪里就在应用人工智能;哪里需要自动化或半自动化,哪里就在应用人工智能的理论、方法和技术。目前,人工智能应用的主要领域,也就是计算机应用的主要领域。 人工智能是一门研究人类智能的机理以及如何用机器模拟人的智能的学科。从后一种意义上讲,人工智能又被称为“机器智能”或“智能模拟” 。人工智能是在现代电子计算机出现之后才发展起来的,它一方面成为人类智能的延长,另一方面又为探讨人类智能机理提供了新的理论和研究方法。 学习机制的研究是人工智能研究的一项核心课题。它是 智能系统具有适应性与性能自完善功能的基础。学习过程具有以下特点:学习行为一般具有明显的目的性,其结果是获取知识;
附件 科技创新2030—“新一代人工智能” 重大项目2020年度项目申报指南 为落实《新一代人工智能发展规划》,启动实施科技创新2030—“新一代人工智能”重大项目。根据重大项目实施方案的部署,科技部组织编制了2020年度项目申报指南,现予以正式发布。 本重大项目的总体目标是:以推动人工智能技术持续创新和与经济社会深度融合为主线,按照并跑、领跑两步走战略,围绕大数据智能、跨媒体智能、群体智能、混合增强智能、自主智能系统等五大方向持续攻关,从基础理论、支撑体系、关键技术、创新应用四个层面构筑知识群、技术群和产品群的生态环境,抢占人工智能技术制高点,妥善应对可能带来的新问题和新挑战,促进大众创业万众创新,使人工智能成为智能经济社会发展的强大引擎。 2020年度项目申报指南在新一代人工智能基础理论、共性关键技术、新型感知与智能芯片、人工智能提高经济社会发展水平创新应用等4个技术方向启动22个研究任务,拟安排国拨经费概算5.6亿元。项目鼓励充分发挥地方和市场作用,强化产学研用紧密结合,调动社会资源投入新一代人工智能研发。指南技术方向“2.新一代人工智能共性关键技术”和“4.人工智能提高经济社会 —1—
发展水平创新应用”所属任务的项目,配套经费与国拨经费比例不低于2:1;指南技术方向“3.新型感知与智能芯片”所属任务的项目,配套经费与国拨经费比例不低于1:1。 各研究任务要求以项目为单元整体组织申报,项目须覆盖所申报指南方向二级标题(例如:1.1)下的所有研究内容并实现对应的研究目标。除特殊说明外,各研究任务拟支持项目数均为1~2项,每个项目下设课题数不超过5个,所含参研单位总数不超过10家,实施周期为3~5年。项目设1名项目负责人,项目中的每个课题设1名课题负责人。基础理论部分研究任务1.1—1.5的申报要求详见具体申报说明。 指南中“拟支持项目数为1~2项”是指:在同一研究方向下,当出现申报项目评审结果前两位评分评价相近、技术路线明显不同的情况时,可同时支持这2个项目。2个项目将采取分两个阶段支持的方式。建立动态调整机制,第一阶段完成后将对2个项目执行情况进行评估,根据评估结果确定后续支持方式。 1.新一代人工智能基础理论 1.1脑结构和功能启发的新型神经网络模型 研究内容:针对当前神经网络计算模型依赖大量标注样本、鲁棒性和适应性差、可解释性不足、能效比低等局限,研究受特定神经环路启发,发展具有记忆、稀疏编码、自适应等特征的新一代神经网络模型;研究大规模复杂网络的高效学习和计算方法,发展复杂网络学习泛化性理论;设计具有自适应能力的神经网络结构,突—2—
工业机器人 班级:10机自本2 姓名:李宝东 学号:1010111056 指导老师:
智能机器人的研究现状及其发展趋势 李宝东 (铜陵学院机械工程学院10级2班1010111056) 摘要:本文扼要地介绍了智能机器人技术的发展现状,以及世界各国智能机器人的发展水平,然后介绍了智能机器人的分类,从几个典型的方面介绍了智能机器人在各行各业的广泛应用,讨论了智能机器人的发展趋势以及对未来技术的展望,最后提出了自己的建议和设想,分析我国在智能机器人方面发展并提出期望。 关键词:智能机器人;发展现状;应用;趋势 The Sesearch Status and Development Trend of I ntelligent robots Li Baodong (Tongling College of Mechanical Engineering College Class 2 of Grade 10, 1010111056) Abstract: T his paper briefly introduces the developing situation of the intelligent robot technology, and the world of intelligent robot development level, and then introduces the classification of intelligent robot, introduced from the aspects of several typical intelligent robot is widely used in all walks of life, discusses the development trend of intelligent robots and outlook for the future technology, and finally puts forward his own Suggestions and ideas, Analysis of our country in the aspect of intelligent robot development and expectation is put forward. Keywords: Intelligent Robot; Current Situation of The development; Application; Trend 0引言 机器人是一种可编程和多功能的,用来搬运材料、零件、工具的操作机,或是为了执行不同的任务而具有可改变和可编程动作的专门系统。智能机器人则是一个在感知-思维-效应方面全面模拟人的机器系统,外形不一定像人。它是人工智能技术的综合试验场,可以全面地考察人工智能各个领域的技术,研究它们相互之间的关系。还可以在有害环境中代替人从事危险工作、上天下海、战场作业等方面大显身手。一部智能机器人应该具备三方面的能力:感知环境的能力、
2018~2019年度广东省重点领域研发计划“智能机器人与装备制造”重大科技专项申报条件、时间、流程 申报要求 (一)申报单位主要为广东省内注册的创新主体,包括科研院所、高校、企事业单位和行业组织等;鼓励港澳地区高校院所作为牵头单位或独立申报;欢迎全国具备相应条件和能力的企事业单位申报,项目评审与立项过程按照相关规定与广东省内单位平等对待。 鼓励以企业为主体,产学研结合,联合相关优势单位进行申报。 如企业作为牵头单位,必须是高新技术企业或大型龙头骨干企业,建有研发机构,在本领域拥有国家级、省部级重大创新平台,且以本领域领军人物作为项目负责人,项目总投入中自筹经费一般不少于70%。 省外单位牵头申报的,与省内单位公平竞争,择优纳入科技计划项目库中管理;入库的项目在满足吸纳广东单位参与到项目研发中(承担的工作量不少于30%)、在广东注册落户或团队加入广东省内单位、科研成果向广东单位转移转化等条件之一后,正式列入省级科技计划,拨付项目资金。 (二)项目内容真实可信,不得夸大自身实力与技术、经济指标,各单位须对申报资料的真实性负责,并提供申报材料真实性承诺函。项目一经立项,将根据申报书内容转化生成合同书,无正当合理的依据不予修改调整。 (三)有以下情形之一的项目负责人或申报单位不得进行申报或通过资格审查: 1.项目负责人或企业法人有广东省级科技计划项目3项以上(含3项)未完成结题的或有项目逾期一年未结题的(平台类、普惠性政策类、后补助类项目除外); 2.在省级财政专项资金审计、检查过程中发现重大违规行为的; 3.同一项目通过变换课题名称等方式进行多头申报的;
4.项目主要内容已由该单位单独或联合其他单位申报并已获得省科技计划立项的; 5.省内单位项目未经主管部门组织推荐的; 6.有严重失信行为记录和相关社会领域信用“黑名单”记录。 (四)申报单位应认真做好经费预算,按实申报,且应符合申报指南有关要求。 申报方式 符合申报条件的企事业单位通过“广东省政务服务网”或“省科技厅阳光政务平台”提交有关资料进行申报。 申报项目 专题一:机器人多机控制/人机共融技术(专题编号:0915) 项目1:机器人感知与人机共融技术研究 研究内容: 针对制造任务日趋复杂、多样、个性化的需求,研究机器人多模态感知、人机共融作业技术;研究人机共融协作过程中的动力学、可靠性和稳定性研究;研究自然语言、手势、体势、肌电信号、表情识别(包括眼动)、脑电信号等多模态感知方法;研究机器人与人自然交互和快速示教方法;研究人体动作意识识别、机器人智能避障、碰撞检测等安全机制,研究机器人力/位耦合控制、人机协同作业。 考核指标: 实现3 种以上的感知与交互方法,支持快速示教、智能避障、阻抗/导纳控制、力/位耦合控制,快速示教效率提高1 倍以上,避障有效率大于99%,形成工业机器人产品,并针对柔性装配、钻铆等典型工业应用场景,完成不少于5 个实际应用案例。申请5 项以上发明专利。 支持方式与强度:采用竞争性评审、无偿资助方式;资助额度1000 万元左右/项。 项目2:复杂环境下人机协同作业中的安全关键技术
综述 Review 0引言 智能机器人是具有感知、思维和行动的机器人,可获取、处理和识别多种信息,自主完成较为复杂的操作任务。智能机器人技术是一个交叉的学科,在计算机技术和人工智能科学发展的基础上产生,作为新一代生产和服务的技术,在制造和非制造领域都具有广泛、重要的应用。 本文在前人文献的基础上详细研究了智能机器人技术的研究意义,总结了现阶段的发展现状,分析了面临的挑战以及未来的发展趋势。 1智能机器人技术的研究意义及发展现状 1.1研究意义 随着科学技术的不断发展,人类社会开始进入到智能时代,社会的发展对智能技术也不断地提出了新的需求,机器人技术由原来的工业机械手发展到现在的智能机器人技术[1],技术的发展给人类的生产生活带来新的变革。 智能机器人技术有着重要的理论意义和应用价值。在理论上,机器人技术具有多学科融合和多技术集成的特点,涉及众多学科领域的尖端技术,如平衡控制设计、智能避障设计等,这造成了其复杂性,令智能机器人感知技术、通信技术、机械结构的研究都是一种挑战,促使特征提取算法、识别算法、路径规划算法朝着智能化的方向发展,促进模式识别理论的发展;另外,机器人是否实现智能化与机器人本身的结构也有很大的关系,要使其能完全智能化地完成任务,除了要有智能化算法还要有灵活的机构,因此智能机器人技术的发展将极大地促进机械结构理论的发展,其发展水平能够反映出一个国家或地区信息与自动化技术的综合实力。 智能机器人技术在实际生活中有着具大的应用价值。近年来各个行业的加速发展都对工业机器人提出了新的要求,带动工业机器人不断向智能化发展,机器人的智能化令工业领域效率提升的例子屡见不鲜。例如,传统的高速传送机器人识别物体存在障碍,导致实现自动化的进程比较缓慢。采用了视觉传感器和跟踪系统组合起来的新型智能化传送机器人,具备了视觉跟踪功能,能够进一步提高机器人的传送效率。 智能机器人技术除了在工业领域有广泛的应用外,在医疗和家庭服务行业也有着广泛的应用和新的需求。老龄化社会和残疾人服务对智能服务机器人有极大的市场需求。目前我国60岁以上人口已超过总人口的10%,预计到2015年全国老年人口总数将达到2亿人,人口的老龄化问题将成为中国面临的前所未有的新挑战;此外,我国残疾人占总人口的比重位居全世界较高国家之列。而智能机器人的发展将会提供诸如取物、康复训练等服务,将减少整个社会对护理人员数量和质量的需求。如今,达芬奇医疗机器人已经实现了临床上的应用,给患者带来了福音,也帮助医生提高了手术的效率和质量。智能机器人技术的发展为医疗事业的发展和变革带来了新的希望。 与此同时,特种探险救灾智能机器人也给人类带来了巨大的帮助,以前特殊环境下或及其危险的环境下,人类是无法进行了解或救灾的,现在随着智能机器人技术的发展,去这种特殊环境下作业成为了可能,为人类探索未知领域打开了一扇窗。多机器人系统的智能化研究将有助于实现机器人群真正实现群体间自主协调工作,实现机器人群自主大规模侦察巡逻、抢险救灾和复杂场景的服务等任务。而且机器人可以代替人们在有辐射、粉尘、毒气、高温等极限、危险、特殊环境下进行作业[2]。 我国在校学生人数众多,教育事业对教育机器人的需求将形成一个巨大的市场。在提倡素质教育、通识教育、研究型大学模式的今天,这种寓教于乐的新型教育模式已成为青少年高科技教育的有效手段和工具。同时,我国是世界玩具生产大国,产量已占全球 智能机器人技术研究进展 张乃风 张志先 陶伟谦 (东北大学信息科学与工程学院,辽宁沈阳,110004) 摘 要: 智能机器人技术是现代研究领域较为活跃的一个发展方向,其涉及柔性加工系统、计算机集成制造系统、柔性自动化和自动工厂等领域,是21世纪最先进的技术之一。本文在已有相关工作的基础上,分析了智能机器人 技术的发展现状、面临的挑战以及未来的发展趋势。 关键词:机器人,智能化 Rebot Technique and Application 2012.69
智能机器人开题报告 毕业设计(论文)开题报告 ――智能移动机器人系统设计一(设计目的及意义 随着计算机、网络、机械电子、信息、自动化以及人工智能等技术的飞速发展,移动机器人的研究进入了一个崭新的阶段。同时,太空资源、海洋资源的开发与利用为移动机器人的发展提供了广阔的空间。目前,智能移动机器人,无人自主车等领域的研究进入了应用的阶段,随着研究的深入,对移动机器人的自主导航能力,动态避障策略,壁障时间等方面提出了更高的要求。地面智能机器人路径规划,是行驶在复杂动态自然环境中的全自主机器人系统的重要环节,而地面智能机器人全地域全自主技术的研究,是当今国内外学术界面临的挑战性问题。 移动机器人是一类能够通过传感器感知环境和自身状态,实现在有障碍物的环境中面向目标自主运动,从而完成一定功能的机器人系统。理想的自主移动机器人可以不需人的干预在各种环境中自主完成规定任务,具有较高的智能水平,但目前全自主的移动机器人还大多处于实验阶段,进入实用的多为自主移动机器人,通过人的干预在特定环境中执行各种任务,而遥控机器人则完全离不开人的干预。 智能移动机器人是一类能够通过传感器、感知环境和自身状态,实现在有障碍物的环境中面向目标自主运动,从而完成一定功能的机器人系统。移动机器人技术研究综合了路径规划、导航定位、路径跟踪与运动控制等技术。涉及包括距离探测、视频采集、温湿度以及声光等多种外部传感器,作为移动机器人的输入信息。移动机器人的运动控制主要是完成移动机器人的运动平台,提供一种移动机器人的控制方式。性能良好的移动机器人运动控制系统是移动机器人运行的基础,能够服务于移动机器人研究的通用开发平台。
项目概要设计书 合同编号 SYKJ20151219001 版本 文件名称 智能机器人运动平台系统新技术开发项目概要 设计书 文件状态 试制□ 受控□ 智能机器人运动平台系统新技术开发项目概要设计书 编制: 项目型号: 项目名称: 智能机器人运动平台系统新技术开发项目
项目名称智能机器人运动平台系统新技术开发项目 目录 目录 (2) 修改记录 (3) 1、技术目标 (4) 2、适用范围 (4) 3、技术功能要求 (4) 4、使用环境要求 (4) 5、技术指标 (4) 6、认证需求 (4) 7、标准法规需求 (4) 8、客户提供的配件 (4) 9、技术开发工作概述 (4) 10、验收标准 (4) 注意:任何相关性变更都需发出变更通知
项目名称 智能机器人运动平台系统新技术开发项目 修改记录 文件编号 版本号 拟制人/ 修改人 拟制/修改日期 更改理由 主要更改内容(写要点) 注1:任何相关性变更都需发出变更通知。 注2:每次更改归档文件时,需填写此表。 注3:文件第一次归档时,“更改理由”栏写“新建”、“主要更改内容”栏写“无”。
项目名称智能机器人运动平台系统新技术开发项目 内容如下: 1、技术目标 通过智能自动避障和智能自动回充技术,实现机器智能躲避障碍物,智能自主行走和自动寻找充电桩充电功能。 2、适用范围:该技术仅适用于智能机器人系列产品 3、技术功能要求 1)自动避障 当机器人运行到障碍物前面时, 自动避障感应器即发送指令给智能芯片调整速度及行走方向; 2)防跌落 当任何一个角运行到地面边缘时,边框防跌落感应器即发送指令给智能芯片调整行走路线保证不会冲出边缘; 3)自动回充 当电流剩余10%自动回到原点充电 使用环境要求:正常温度正常湿度 5、技术指标:寿命3年 6、认证需求:3C认证 7、标准法规需求:3C认证 8、客户提供的配件:无 9、技术开发工作概述:智能机器人运动平台系统新技术开发 10、验收标准:以甲乙双方技术人员签订的详细规格书以及项目确认书为验收标准。