
- 1 -
基于分布式的捷联导航计算机系统设计与实现
夏春宁,吴峻
东南大学仪器科学与工程系(210096)
xcn25@https://www.doczj.com/doc/4c402807.html,
摘要:为消除大型载体结构变形对载体上设备观测精度的影响,本文介绍了分布式姿态基准系统并给出其设计方案,最后完成捷联姿态基准导航计算机的硬件方案设计。
关键字:分布式系统 捷联姿态基准 导航计算机 DSP
引言
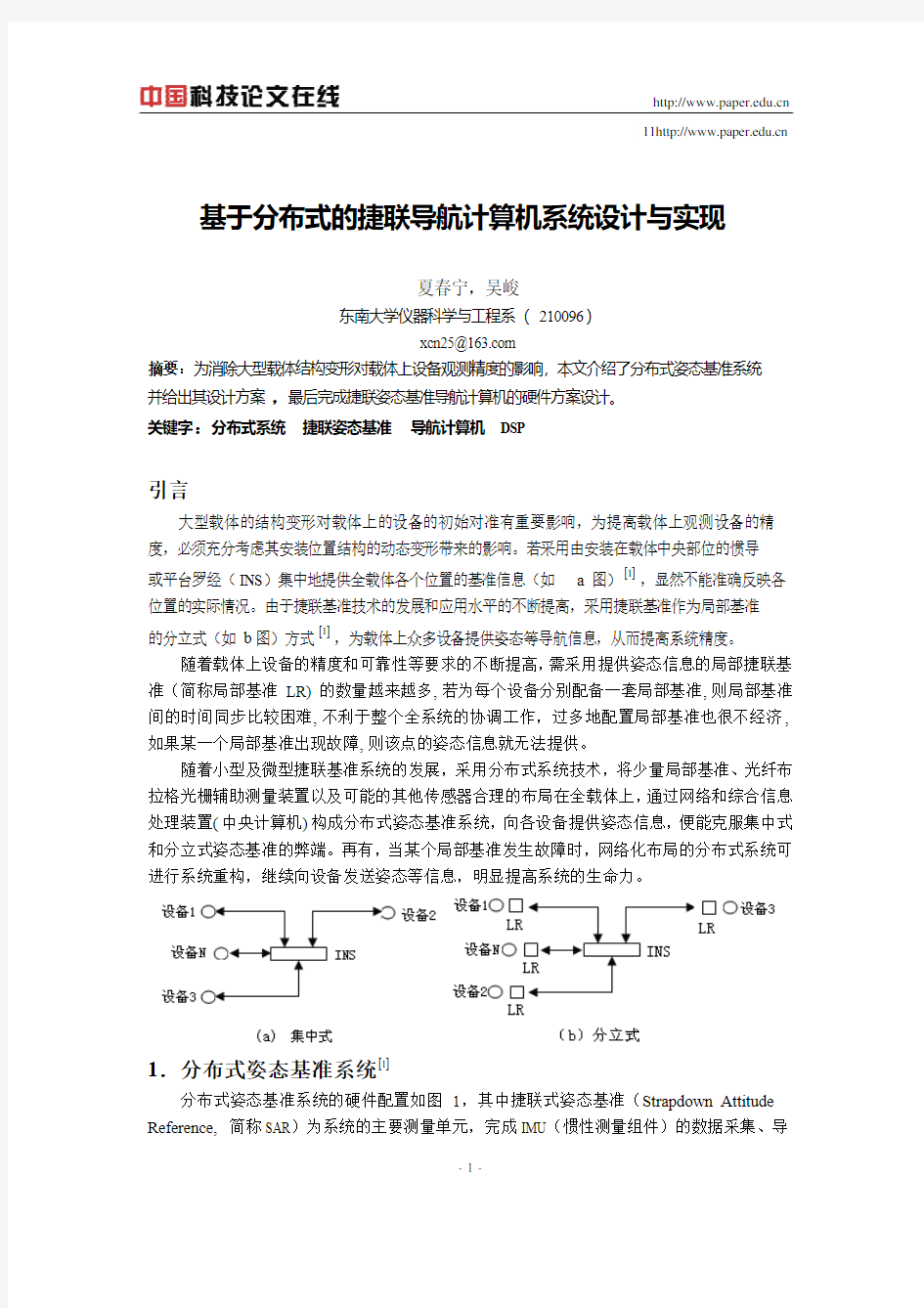
大型载体的结构变形对载体上的设备的初始对准有重要影响,为提高载体上观测设备的精度,必须充分考虑其安装位置结构的动态变形带来的影响。若采用由安装在载体中央部位的惯导或平台罗经(INS )集中地提供全载体各个位置的基准信息(如a 图)[]
1,显然不能准确反映各位置的实际情况。由于捷联基准技术的发展和应用水平的不断提高,采用捷联基准作为局部基准的分立式(如b 图)方式[]1,为载体上众多设备提供姿态等导航信息,从而提高系统精度。
随着载体上设备的精度和可靠性等要求的不断提高,需采用提供姿态信息的局部捷联基准(简称局部基准LR) 的数量越来越多,若为每个设备分别配备一套局部基准,则局部基准间的时间同步比较困难,不利于整个全系统的协调工作,过多地配置局部基准也很不经济,如果某一个局部基准出现故障,则该点的姿态信息就无法提供。
随着小型及微型捷联基准系统的发展,采用分布式系统技术,将少量局部基准、光纤布拉格光栅辅助测量装置以及可能的其他传感器合理的布局在全载体上,通过网络和综合信息处理装置(中央计算机)构成分布式姿态基准系统,向各设备提供姿态信息,便能克服集中式和分立式姿态基准的弊端。再有,当某个局部基准发生故障时,网络化布局的分布式系统可进行系统重构,继续向设备发送姿态等信息,明显提高系统的生命力。
1.分布式姿态基准系统[]1
分布式姿态基准系统的硬件配置如图1,其中捷联式姿态基准(Strapdown Attitude Reference,简称SAR )为系统的主要测量单元,完成IMU (惯性测量组件)的数据采集、导
航计算、通过网络与综合信息处理装置实现信息传送,它们的数量与安装位置取决于载体上设备的实际位置和优化布局计算;FBG(光纤布拉格光栅)作为辅助变形测量装置进行结构变形测量;综合信息处理装置将各个局部基准和变形测量装置等提供的信息进行融合和数据重组,然后再通过网络媒介向所有连接在网络媒介上的设备发送姿态信息;时统装置用来实现各局部基准与变形测量装置的同步取数。
综合信息处理装置选用计算功能比较强、适用于恶劣环境的设备级计算机--PC104工控机,它与IMU,FBG等测量装置构成的分布式姿态基准系统,以CAN网络实现通信。一方面局部基准、光纤布拉格光栅测量装置等通过CAN网络将众多信息送给PC104工控机进行多信息融合和数据重组,另一方面PC104工控机将以太网上传来的外部信息通过CAN网络传给各局部基准。综合信息处理装置通过多信息融合获得各个设备点的姿态信息,然后通过以太网将姿态信息传送给挂在以太网上的各个设备。
2.捷联姿态基准设计
2.1捷联姿态基准导航计算机的硬件设计方案
捷联姿态基准具有运算量大,实时性要求高,变量动态范围大,计算精度要求高等特
- 2 -
点。捷联姿态基准的主要任务有以下三类:1、数据采集;2、数据处理与导航等运算;3、
导航数据输出。
数字信号处理器(DSP) 是专为高速数据处理而设计的微处理器。从结构特点上来看, 具
有改进的哈佛结构(数据与程序分开,以提高数据吞吐量)、专用的硬件乘法器、多功能
单元并行操作、专用寻址单元、多级流水机制(减少指令执行时间)、高效的精简指令集
等, 使芯片的指令周期降到10ns 以下, 在需要大运算量实时处理的环境中,非常适合用DSP
芯片来实现。从制造工艺上来看, 其采用先进的制造工艺使其体积小、重量轻、功耗低。
目前,DSP 的价格越来越低,性价比日益提高,且系统设计开发方便、产品易于集成,已成为
低成本、小型化的捷联基准系统的首选微处理器。
一个捷联基准除了要完成大量的运算处理工作外,还要实现惯性测量元件(陀螺仪和
加速度组件)的数据采集、与外部系统的通信、时序逻辑控制等功能,在这样的情况下,
由于DSP芯片本身处理能力和结构的限制,仅用一个DSP芯片来完成,会影响系统的实时性
能。采用两个或多个DSP或由一个通用微处理器MPU加一个或几个DSP构成主从式多处理器是
23、。由DSP主要完成导航计算任务,也就是计算模块实现的功能,可选择地系统实现方案[]
其他处理器实现数据采集和通信控制模块功能。
常用的单片微处理器以控制能力见长而运算能力一般,与DSP 结合可以实现优势互补。
所以利用一个MPU加上一个DSP构成主从式多处理器系统,是一个比较理想的方案。DSP
作为从机主要完成主机间的数据交换、捷联惯性系统的算法运算等功能;MPU作为主机主要
完成FOG光纤陀螺仪(数字信号,3路串口输出)的采集、加速度计(6路脉冲信号)的采集、
与从机间的数据交换、导航信息输出、与外部系统通信等功能;整个系统在定时控制下同
步协调工作。
捷联姿态基准导航计算机硬件结构框图如图2 Array
2.2系统硬件
本系统的DSP芯片采用TI公司的TMS320VC33,它是TMS320C3X系列中性价比最高、功耗最
低的一种芯片。该芯片采用3.3V电压(核心电压是1.8V ),即使工作在最高速度,其功耗也
- 3 -
- 4 -低于200mW ;内部继承了34K 字的双向访问静态RAM ,可满足大部分系统对RAM 的要求;浮点型的TMS320VC33,字长32位,累加器40位,运算精度较高;有足够的处理能力,VC33有一120和-150两种,-120主频17ns,120MFLOPS, 60MIPS ; -150主频13ns,150MFLOPS, 75MIPS 。适合于运算量大、实时性要求高、计算精度要求高的捷联姿态基准系统。VC33外围主要由晶振电路,电源电路,复位电路等组成。VC33片内存储区实际上无法满足导航计算机存储数据和运行程序的需要,必须在片外扩展存储区,包括静态RAM 区(SRAM )和永久ROM 区(FLASH )。由于系统对实时性要求高,与DSP 接口电路尽量采用快速零等待状态器件,同时采用3.3V 的器件可以与VC33直接连接。
MPU 选择C8051F040单片机,它是混合信号片上系统级单片机,内含CAN2.0B 控制器,25MIPS 高速流水线式CIP-51控制器内核,64KB 的可编程FLASH 存储器,RAM 可存储4352
(4096+256)字节,SPI 、SMBus 和2个UART 串行接口,有12位的ADC ,8位的多通道DAC ,片内有看门狗定时器,温度传感器等,工作电压为2.7V -3.6V 。进一步信息可参考文献[5]。
C8051F040的端口I/O 、/RST 和JTAG 引脚都容许5V 的输入信号电压,但输出的最大电压值为VDD (2.7 到3.6V ),如果单片机外围5V 器件需要一个高于该VDD 的输入电压才能工作,那么为了提供一个比VDD 高的输入电压值,可将端口引脚的输出方式设置为“漏极开路”,并将输出端通过一个上拉电阻接到5V 电源。此时,C8051F040的逻辑‘1’输出将被提升到5V ,而逻辑‘0’为地电平。
主从处理器间的数据交换采用双端口RAM 方式,双端口RAM 具有两组数据总线和地址总线,因而主从处理器可以同时访问共享其内部的数据存储器。本系统选用IDT 公司的异步高速双端口RAMIDT70v05,存储器资源为8Kx8b,3.3V 电压供电,它具有中断、仲裁、扩展以及旗语通讯等逻辑功能,允许两个控制器同时读取任何存储单元(包括同时读同一地址单元),但不允许同时写或一读一写同一地址单元。主从处理器与IDT70v50之间皆采用中断方式完成对存储单元中数据的读写任务。IDT70v50的数据位宽为8位,当它与具有32位数据宽度的DSP 进行数据交换时,采用DSP 数据总线的低8位与双口RAM 的数据总线相连。DSP 发送32位数至双口RAM 时,单字发送任务分四次进行,先发低8位,再利用移位指令依次发送高24位。DSP 从双口RAM 中读取数据操作和发送时类似。
光纤陀螺仪信号以三路串口形式输出,C8051F040只有2个异步串行口,需要进行串口扩展。加速度计组件输出为6路脉冲信号,由于导航算法要求对各惯性器件输出的信号进行同时采集,因此多路脉冲信号采集器中各路计数器启动后,在每个采集时刻到来时,必须先将采集器中的所有计数器的计数值同时锁存(即实现了同时采集),然后再分时读出已被锁存的计数值。采用两片Intel8254可实现加速度计信号采集,Intel8254内含3个16位计数器,它的读回命令控制字可使三个计数器的计数值同时锁存而不影响正在进行的计数过程,通过硬件译码实现两片Intel8254芯片上6路计数器的同时锁[]
6存。
C8051F040内部集成有BOTSHCAN,它兼容CAN 技术规范2.0A 和2.0B,主要由CAN 内核、消息RAM(独立于CIP-51的RAM )、消息处理单元和控制寄存器组成。CAN 的输出输入必须加总线收发器才能与CAN 物理总线相连。本系统采用TJA1050高速CAN 收发器,它具有电磁辐射低、防短路、不上电时对总线无影响等特点,有高速或静音两种模式。为了增加CAN 节点的抗干扰能力,
将CAN引脚通过高速光耦与总线收发器相连,可实现各节点之间的电气隔离。
系统硬件框图如图3
2.3实时操作系统应用
当系统处理的任务较多,编程头绪也多,为了简化应用程序的编写思路,实现程序模块化,方便系统功能的扩充,提高应用程序的实时性和可靠性,将实时操作系统移植到本系统中就成为一件很有意义的事。
实时操作系统μCOS -Ⅱ是广泛应用的、源码公开的嵌入式实时操作系统,它能成功地移植到各种16位、32位单片机上,也能移植到8位单片机应用系统中。该操作系统具有执行效率高、占用空间小、实时性能优良、可扩展性强、可剪裁等特点,最小内核可编译至2KB,适合小型控制系统。C8051F040微控制器4KB的数据空间,满足μCOS-Ⅱ对硬件堆栈的要求,在理解了处理器和编译器的技术细节后,系统的移植只需要修改和处理器相关的代码。
2.4导航计算机的软件组成
系统软件主要分两部分:
1)系统模块:接收外部IMU 部件的数据采集信息,然后转换成系统要求可用的信息;与DSP
- 5 -
间的数据交换;与上位机的CAN总线通信,主要完成姿态信息的发送和初始
位置等信息的接收。
2)导航模块:包括初始对准、姿态转换和更新、导航算法、误差补偿等子模块。主要任务是实现捷联算法,产生导航要求的数据。
3.结论
本文就分布式姿态基准系统以及本系统中捷联导航计算机的实现方案进行了讨论。分布式姿态基准系统是通过少量设备所在点的姿态信息,通过多信息融合和数据重组技术,给出载体上多个设备点的姿态信息,从而消除载体结构变形的影响,对提高观测等设备的精度有重要意义。
参考文献
[1]万德钧,刘玉峰,消减舰船变形的影响和为全舰提供高精度姿态基准,中国惯性技术学报,2005,13(4)
[2]单茂华,周白令,李宏生,DSP 主从式多处理器在小型捷联惯性导航系统中的应用,南京惯性技术学术交流会论文集[C],南京,2001
[3]薛志宏,刘建业,基于DSP和单片机的双CPU导航计算机设计,电子产品世界,2003.4
[4]简红清,马迎建,高爽,罗光明,李敏,光纤陀螺油井测斜系统硬件研究及设计,中国惯性技术学报2006,14(2)
[5] 潘琢金,施国君,C8051Fxxx 高速SOC单片机原理及应用主控制信号[M],北京航空航天大学出版社,2002
[6] 朱欣华,朱樟兴,戴达强,SINS 中高性能多路脉冲信号采集器的设计目标及设计方法,仪器仪表学报,2001,22(4)。
Design and Realization of Strapdown Navigation Computer
System Based on Distribution
Xia Chunning Wu Jun
Department of Instrument Science and Engineering ,Southeast University ,210096
Abstract
z In order to eliminate the influence caused by the large carrier structure distortion on observation precision of equipment on the large carrier, a distributed attitude reference system as well as its scheme is introduced in this paper. Finally the hardware design of strapdown attitude reference navigation computer is completed.
z Key words:distributed system; attitude reference; navigation computer; DSP
作者简介:夏春宁:女,(1981-),硕士研究生,研究方向:导航制导与控制
吴峻:男,(1965-),副教授,研究方向:精密仪器及机械
- 6 -
分布式汽车电气电子系统设计和实现 架构
分布式汽车电气/电子系统设计和实现架构在过去的十几年里,汽车的电气和电子系统已经变得非常的复杂。今天汽车电子/电气系统开发工程师广泛使用基于模型的功能设计与仿真来迎接这一复杂性挑战。新兴标准定义了与低层软件的标准化接口,最重要的是,它还为功能实现工程师引入了一个全新的抽象级。 这提高了软件组件的可重用性,但不幸的是,关于如何将基于模型的功能设计的结果转换成高度环境中的可靠和高效系统实现方面的指导却几乎没有。 另外,论述设计流程物理端的文章也非常少。本文概述了一种推荐的系统级设计方法学,包括、分布在多个ECU中的网络和任务调度、线束设计和规格生成。 为什么需要AUTOSAR? 即使在同一家公司,“架构设计”对不同的人也有不同的含义,这取决于她们站在哪个角度上。物理架构处理系统的有形一面,如布线和连接器,逻辑架构定义无形系统的结构和分配,如软件和通信协议。当前设计物理架构和逻辑架构的语言是独立的,这导致相同一个词的意思能够完全不同,设计团队和流程也是独立的,这也导致了一个非常复杂的设计流程(如图1所示)。
图1:物理和逻辑设计流程。 这种复杂性导致了次优设计结果,整个系统的正确功能是如此的难于实现,以致于几乎没有时间去寻求一种替代方法,它可导致更坚固的、可扩展性更好的和更具成本效益的解决方案。为了实现这样一种解决方案,设计师需要新的方法,它能够将物理和逻辑设计流程紧密相连,并依然允许不同的设计团队做她们的工作。 新兴的AUTOSAR标准为系统级汽车电子/电气设计方法学提供了一个技术上和经济上都可行的选择,尽管它主要针对软件层面,即逻辑系统的设计。不过,大量广泛的AUTOSAR元模型及其丰富的接口定义允许系统级电子/电气架构师以标准的格式表示她的设计思想。从经济上看,AUTOSAR标准打开了一个巨大的、统一的市场,它使得能够创立合适的设计工具。
1 绪论 随着计算机和微电子技术的迅猛发展,利用计算机的强大解算和控制功能代替机电稳定系统成为可能。于是,一种新型惯导系统--捷联惯导系统从20世纪60年代初开始发展起来,尤其在1969年,捷联惯导系统作为"阿波罗"-13号登月飞船的应急备份装置,在其服务舱发生爆炸时将飞船成功地引导到返回地球的轨道上时起到了决定性作用,成为捷联式惯导系统发展中的一个里程碑。 捷联式惯性导航(strap-down inertial navigation),捷联(strap-down)的英语原义是“捆绑”的意思。因此捷联式惯性导航也就是将惯性测量元件(陀螺仪和加速度计)直接装在飞行器、舰艇、导弹等需要诸如姿态、速度、航向等导航信息的主体上,用计算机把测量信号变换为导航参数的一种导航技术。现代电子计算机技术的迅速发展为捷联式惯性导航系统创造了条件。惯性导航系统是利用惯性敏感器、基准方向及最初的位置信息来确定运载体的方位、位置和速度的自主式航位推算导航系统。在工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰破坏。它完全是依靠载体自身设备独立自主地进行导航,它与外界不发生任何光、声、磁、电的联系,从而实现了与外界条件隔绝的假想的“封闭”空间内实现精确导航。所以它具有隐蔽性好,工作不受气象条件和人为的外界干扰等一系列的优点,这些优点使得惯性导航在航天、航空、航海和测量上都得到了广泛的运用[1] 1.1 捷联惯导系统工作原理及特点 惯导系统主要分为平台式惯导系统和捷联式惯导系统两大类。惯导系统(INS)是一种不依赖于任何外部信息、也不向外部辐射能量的自主式导航系统,具有隐蔽性好,可在空中、地面、水下等各种复杂环境下工作的特点。 捷联惯导系统(SINS)是在平台式惯导系统基础上发展而来的,它是一种无框架系统,由三个速率陀螺、三个线加速度计和微型计算机组成。平台式惯导系统和捷联式惯导系统的主要区别是:前者有实体的物理平台,陀螺和加速度计置于陀螺稳定的平台上,该平台跟踪导航坐标系,以实现速度和位置解算,姿态数据直接取自于平台的环架;后者的陀螺和加速度计直接固连在载体上作
- 1 - 基于分布式的捷联导航计算机系统设计与实现 夏春宁,吴峻 东南大学仪器科学与工程系(210096) xcn25@https://www.doczj.com/doc/4c402807.html, 摘要:为消除大型载体结构变形对载体上设备观测精度的影响,本文介绍了分布式姿态基准系统并给出其设计方案,最后完成捷联姿态基准导航计算机的硬件方案设计。 关键字:分布式系统 捷联姿态基准 导航计算机 DSP 引言 大型载体的结构变形对载体上的设备的初始对准有重要影响,为提高载体上观测设备的精度,必须充分考虑其安装位置结构的动态变形带来的影响。若采用由安装在载体中央部位的惯导或平台罗经(INS )集中地提供全载体各个位置的基准信息(如a 图)[] 1,显然不能准确反映各位置的实际情况。由于捷联基准技术的发展和应用水平的不断提高,采用捷联基准作为局部基准的分立式(如b 图)方式[]1,为载体上众多设备提供姿态等导航信息,从而提高系统精度。 随着载体上设备的精度和可靠性等要求的不断提高,需采用提供姿态信息的局部捷联基准(简称局部基准LR) 的数量越来越多,若为每个设备分别配备一套局部基准,则局部基准间的时间同步比较困难,不利于整个全系统的协调工作,过多地配置局部基准也很不经济,如果某一个局部基准出现故障,则该点的姿态信息就无法提供。 随着小型及微型捷联基准系统的发展,采用分布式系统技术,将少量局部基准、光纤布拉格光栅辅助测量装置以及可能的其他传感器合理的布局在全载体上,通过网络和综合信息处理装置(中央计算机)构成分布式姿态基准系统,向各设备提供姿态信息,便能克服集中式和分立式姿态基准的弊端。再有,当某个局部基准发生故障时,网络化布局的分布式系统可进行系统重构,继续向设备发送姿态等信息,明显提高系统的生命力。 1.分布式姿态基准系统[]1 分布式姿态基准系统的硬件配置如图1,其中捷联式姿态基准(Strapdown Attitude Reference,简称SAR )为系统的主要测量单元,完成IMU (惯性测量组件)的数据采集、导
本文作者Kate Matsudaira是一位美丽的女工程副总裁,曾在Sun Microsystems、微软、亚马逊这些一流的IT公司任职。她有着非常丰富的工作经验和团队管理经验,当过程序员、项目经理、产品经理以及人事经理。专注于构建和操作大型Web应用程序/网站,目前她的主要研究方向是SaaS(软件即服务)应用程序和云计算(如大家所说的大数据)。 本文是作者在AOSA一书介绍如何构建可扩展的分布式系统里的内容,在此翻译并分享给大家。 开源软件已经成为许多大型网站的基本组成部分,随着这些网站的逐步壮大,他们的网站架构和一些指导原则也开放在开发者们的面前,给予大家切实有用的指导和帮助。 这篇文章主要侧重于Web系统,并且也适用于其他分布式系统。 Web分布式系统设计的原则 构建并运营一个可伸缩的Web站点或应用程序到底是指什么?在最初,仅是通过互联网连接用户和访问远程资源。 和大多数事情一样,当构建一个Web服务时,需要提前抽出时间进行规划。了解大型网站创建背后的注意事项以及学会权衡,会给你带来更加明智的决策。下面是设计大型Web系统时,需要注意的一些核心原则: ?可用性 ?性能 ?可靠性 ?可扩展 ?易管理 ?成本 上面的这些原则给设计分布式Web架构提供了一定的基础和理论指导。然而,它们也可能彼此相左,例如实现这个目标的代价是牺牲成本。一个简单的例子:选择地址容量,仅通过添加更多的服务器(可伸缩性),这个可能以易管理(你不得不操作额外的服务器)和成本作为代价(服务器价格)。 无论你想设计哪种类型的Web应用程序,这些原则都是非常重要的,甚至这些原则之间也会互相羁绊,做好它们之间的权衡也非常重要。 基础
外文翻译 原文来源The Hadoop Distributed File System: Architecture and Design 中文译文Hadoop分布式文件系统:架构和设计 姓名 XXXX 学号 200708202137 2013年4月8 日
英文原文 The Hadoop Distributed File System: Architecture and Design Source:https://www.doczj.com/doc/4c402807.html,/docs/r0.18.3/hdfs_design.html Introduction The Hadoop Distributed File System (HDFS) is a distributed file system designed to run on commodity hardware. It has many similarities with existing distributed file systems. However, the differences from other distributed file systems are significant. HDFS is highly fault-tolerant and is designed to be deployed on low-cost hardware. HDFS provides high throughput access to application data and is suitable for applications that have large data sets. HDFS relaxes a few POSIX requirements to enable streaming access to file system data. HDFS was originally built as infrastructure for the Apache Nutch web search engine project. HDFS is part of the Apache Hadoop Core project. The project URL is https://www.doczj.com/doc/4c402807.html,/core/. Assumptions and Goals Hardware Failure Hardware failure is the norm rather than the exception. An HDFS instance may consist of hundreds or thousands of server machines, each storing part of the file system’s data. The fact that there are a huge number of components and that each component has a non-trivial probability of failure means that some component of HDFS is always non-functional. Therefore, detection of faults and quick, automatic recovery from them is a core architectural goal of HDFS. Streaming Data Access Applications that run on HDFS need streaming access to their data sets. They are not general purpose applications that typically run on general purpose file systems. HDFS is designed more for batch processing rather than interactive use by users. The emphasis is on high throughput of data access rather than low latency of data access. POSIX imposes many hard requirements that are not
分布式汽车电气-电子系统设计和实现架构
————————————————————————————————作者:————————————————————————————————日期:
分布式汽车电气/电子系统设计和实现架构 在过去的十几年里,汽车的电气和电子系统已经变得非常的复杂。今天汽车电子/电气系统开发工程师广泛使用基于模型的功能设计与仿真来迎接这一复杂性挑战。新兴标准定义了与低层软件的标准化接口,最重要的是,它还为功能实现工程师引入了一个全新的抽象级。 这提高了软件组件的可重用性,但不幸的是,关于如何将基于模型的功能设计的结果转换成高度环境中的可靠和高效系统实现方面的指导却几乎没有。 此外,论述设计流程物理端的文章也非常少。本文概述了一种推荐的系统级设计方法学,包括、分布在多个ECU中的网络和任务调度、线束设计和规格生成。 为什么需要AUTOSAR? 即使在同一家公司,“架构设计”对不同的人也有不同的含义,这取决于他们站在哪个角度上。物理架构处理系统的有形一面,如布线和连接器,逻辑架构定义无形系统的结构和分配,如软件和通信协议。目前设计物理架构和逻辑架构的语言是独立的,这导致相同一个词的意思可以完全不同,
设计团队和流程也是独立的,这也导致了一个非常复杂的设计流程(如图1所示)。 图1:物理和逻辑设计流程。 这种复杂性导致了次优设计结果,整个系统的正确功能是如此的难于实现,以致于几乎没有时间去寻求一种替代方法,它可导致更坚固的、可扩展性更好的和更具成本效益的解决方案。为了实现这样一种解决方案,设计师需要新的方法,它可以将物理和逻辑设计流程紧密相连,并仍然允许不同的设计团队做他们的工作。 新兴的AUTOSAR标准为系统级汽车电子/电气设计方法学提供了一个技术上和经济上都可行的选择,尽管它主要针对软件层面,即逻辑系统的设计。不过,大量广泛的AUTOSAR元模型及其丰富的接口定义允许系统级电子/电气架构师以标准的格式表达他的设计思想。从经济上看,
石家庄铁道大学毕业设计 基于android的导航系统的设计与实现Design and implementation of the navigation system based on Android 2013届经济管理学院 专业 学号 __ __ 学生姓名 ___ ___ 指导教师 _ _ 完成日期 2013年6月12日
毕业设计成绩单 学生姓名学号班级专业 毕业设计题目基于android的导航系统的设计与实现 指导教师姓名 指导教师职称讲师、讲师 评定成绩 指导教师得分 评阅人得分 答辩小组组长得分 成绩: 院长(主任) 签字: 年月日
毕业设计任务书 题目基于android的导航系统的设计与实现 学生姓名学号班级专业 承担指导任务单位经济管理学院导师姓名导师职称 一、主要内容 本课题旨在基于android技术和百度API和科大讯飞语音API技术给用户提供地图服务,该应用能够正确地显示全国各地大中小城市的地图信息,并能进行地图定位,同时包括卫星地图、交通地图、景点概览、公交、驾车、步行三种出行选择的路线规划、城市各类场所搜索等功能,用户能从中得到对其有用的信息,从而在出行时能够选择一条适合自己的出行,节省宝贵的时间和精力。 二、基本要求 1.开发平台:Windows 7、Android OS、Android SDK-17、ADT-21、JDK 1.7 2.开发工具:Eclipse、Microsoft office viso 2003、Rationalrose 3.论文要求:1万字,外文翻译3千字。 三、主要技术指标 1.系统功能完善,操作方便,界面美观,图形、数据处理准确; 2.分析设计过程合理,文档资料及模型规范、完备; 3.系统发布后可维护性,通用性较好。 四、应收集的资料及参考文献 [1] Jerome.Android A Programmer’s Guide[M]. DiMarzio PRESS,2009:23-27. [2] 林城.Android 2.3应用开发实战[J].机械工业出版社,2011:17-321. [3] 韩超.Android经典应用程序开发[J].人力资源出版社,2011:5-18. [4] 张海藩.软件工程导论(第4版)[J].北京:清华大学出版社,2006:34-38. 五、进度计划 第1周~第3周:毕业实习,查阅资料,熟悉开发环境 第4周~第9周:设计原型系统,算法研究 第10周~第14周:实现推荐算法,开发原型系统,确定论文框架 第15周~第16周:完善系统,撰写论文,准备答辩 教研室主任签字时间年月日
第34卷第4期2005年8月 电子科技大学学报 Jo啪alofUESTofChina V01.34No.4 Aug.2005分布式个人文件系统的设计与实现 何兴高,张凤荔,黄远军,秦志光,周明天 (电子科技大学计算机科学与工程学院成都610054) 【摘要】提出了一种基于E-mail系统的分布式文件系统一EⅧFS,给出了扩展的S删*议(E㈣的状态转换方式和定义,在此基础上研究了利用ESMrP来构建分布式个人文件系统的方法和模型,设计了哪S的模型、内外存的结构、I,o操作、用户接口以及EMDFS的各种功能. 关键词简单邮件传输协议;互联网消息存取协议4;个人网络存储;分布式文件系统 中图分类号TP393文献标识码A DesignandImplementationofDistributedPersonalFileSystem眦Xin唱a0,蕊ANGFeng-li,mIANGYuall.jun,QNzhi倒锄g,盟oUM吨-ti锄 (School0fC伽pu魄Sci∞∞锄dEng.m∞血g,UESTofa血aa姗窖du6100154) Abstract。I'hispaperpresentSadis仃ibmedfilesystemb嬲edonE-mail n锄edE-nlaildis仃ibutedfuesyStem.Thisp印ergives曲state强ddefmi廿onofextension S咖巾鹤ed0nmiswedes蜘也emodel锄dmemodof也eEMDFS,锄dproposemestoreSpa鸭ttlemI锄。巧龃ddisk咖叽鹏ofEMDFS,tlleI/Ooperators,useriIlterfiace,龇ldotherfllnctions. KeywordssiIIlplemail仃趾sfer protocol;intemetmessageaccessprotocol-verSion4;person netwarestorage;dig廿ibutedfilesystem 本文提出了一种基于分布式环境的个人数据的网络存储方式,对现有的网络协议进行扩充,利用E.mail,解决个人数据文件在分布式网络环境下的实时存储、共享。 1E.mail协议及其扩展 E.mail协议包括简单邮件传输协议(SimpleMailTransferProtocol,SMrP)‘1】,简单邮件传输协议服务扩展①xtendedsMrP:EsMrP尸,邮局协议3口ostOmceProtoc01.VerSion3,POP3),互联网消息存取协议4(IrltemetMessageAccessProtocol-V.ersion4,Ⅱ儿心4)【3】’多用途网际邮件扩展(MuhipurposehltemetM2LilExtensions,Mmm)【4】。SMrP本身没有存储空间的概念,对SM冲进行存储扩展,就要引入个人存储空间扩展的概念(storagee)(tendedSMIP,SSMrP)。默认的个人存储空间是SMAILBOx;引入SM俎BOX,可避免普通邮件同个人网络存储的数据相混淆。SSMIP连接后,进入普通的SMIP状态似0n.SSMI.P状态),进行邮件操作。用户可以使用特殊命令SHLO,切换到SSMrP个人存储空间。为了保护用户个人空间,必须对用户进行身份验证,验证成功后,选择个人空间进入;消息发送和个人数据的就以消息格式存储在一条消息中,包含个人数据的所有的消息,都存储在该个人存储空间中。SSMlP协议包括N0n.SSMrP状态、 收稿日期:2004—06一∞ 基金项目:四川省科技攻关项目(IO町Y02舢00l-3) 作者简介:何兴高(1964一),男,硕士,工程师,主要从事计算机控制、智能交通系统方面的研究.
基于天地图的校园导航系统移动端的设计 与开发- 1 引言 天地图是国家测绘地理信息局建设的地理信息综合服务网站。它是数字中国的重要组成部分,是国家地理信息公共服务平台的公众版。通过天地图用户可以进行地理位置的信息查询、浏览、搜索、路线规划等操作,用户也可以通过服务接口调用地理信息服务,在各类应用系统中嵌入天地图的服务资源。本文以天地图移动API为基础,设计开发校园导航系统的Andriod手机客户端,为师生、员工提供查询校园信息、选择路径等功能。 2 系统功能设计(The system function design) 校园导航系统总体功能包括校园浏览、校园查询与定位、校园路线导航和数据管理。 (1)校园浏览 校园浏览主要包括校园地图(矢量、影像图层)的放大、缩小、漫游等。 主要便于同学了解和熟悉校园,如教学楼、食堂、校医院、图书馆、宿舍、教学行政办公室、体育馆、操场等。同事选中某栋学校建筑或者设施,会显示一些提示信息,如图书馆开馆时间,行政办公楼的功能划分以及联系方式等。 (2)校园查询与定位 校园的查询包括属性查询和空间查询。属性查询支持模糊查询,比如输入宿舍,将会显示所有宿舍信息。空间查询包括矩形查询,多边形查询,按照设置距离后的圆查询。查询结果加亮
显示。 (3)校园路线导航 设置(或以当前定位点)起点和终点,地图在这选定的两点间显示标记,再选择导航,地图上将会显示一条最佳导航路径。 (4)数据管理 根据需求将权限分为两类:一类是管理员,一类是普通用户。管理员可以对学校的矢量数据图层空间信息以及相关的属性数据信息进行管理。普通用户比如学生或者教学管理人员,可以对自己感兴趣的位置添加标注。
该论文是本团队帮同学做过的案例,需要源程序或者更多毕业设计联系799523222 毕业设计(论文)车载导航系统的设计与实现 姓名 系别、专业 导师姓名、职称 完成时间
摘要 路径规划系统是根据GPS车载导航系统的需要开发的。本论文详细介绍了GPS车载导航系统的组成、功能、实现过程、路径规划算法以及SuperMap地理信息系统的功能。并以SuperMap为开发平台,在路径规划系统中实现了地图的基本操作。本文重点研究了车载导航系统的路径规划问题。综合考虑并比较了了多种最短路径选择算法。在原始Dijkstra算法的基础上提出了改进,节省了很大的存储空间,提高了效率。 关键词: GPS ,GIS , 车载导航系统,路径规划,Dijkstra算法
Abstract The Route-Planning system is developed for the Vehicle navigation System. The structure, function and the realization of the whole system are demonstrated in detail in this thesis. The GIS(Geographic Information System) theory is introduced .By using SuperMap software as a supporting platform, basic operation of map are realized. The algorithms of Route Planning are discussed in detail. Think over and compare many shortest path algorithms and present a improved algorithm based on the original Dijkstra algorithm in this thesis . It saves memory space and increases efficiency. KEY WORDS: GPS, GIS, Vehicle navigation System , Route-Planning, Dijkstra algorithm
浅析导航系统设计与开发 随着计算机技术的飞速发展,Internet带宽和网络通讯能力大大提高,万维网地理信息系统软件技术取得了长足发展,这一技术正成为高效的全球性信息发布渠道快速进入千家万户。WebGIS 是Internet 技术应用 于GIS 开发的产物,它是利用www方式向用户提供地理空间信息服务的地理信息系统。与传统的GIS相比,WebGIS访问范围更加广泛,实时性强,数据可 分布管理,操作也更简单,适用于不同的软硬件平台,降低了系统成本。WebGIS是当今的热点,作为在GIS方面的一个特殊应用领域,它使全球范围内实现数据共享,它可应用于农业、林业、水利、交通、通讯、城市规划、国土防治、军事、环境、教育等等几十个领域,建立WebGIS已经成了大到大型国家级的应用小至小型企业内部应用的重要任务。但是,由于计算机网络等各方面的限制,目前WebGIS构建的大多是局域网或城域网,并且只能完成地理数据的网上发布,以及简单的空间和属性的双向查询等功能,并不能完成GIS的空间 分析功能,并且还伴有网络安全问题。近年来,各种电子导航系统慢慢发展起来,充分利用WWW带来的便利。WEBGIS采用普通的WEB浏览器,简单易用,用户不需进行专业培训,更实现了全球访问范围,是GIS走向平民化和大众化的最佳途径。本系统正是从WWW的大众化特点出发,设计建成长江大学东校区网络电子地图,为长江大学提供更多的宣传手段。本系统面向全校广大师生以及社会提供长江大学东校区导航服务,提供基础教学设施、运动场所、后勤服务、绿化场所等等校园设施的查询功能,为更多师生提供便利的生活条件,并不断完善系统,直至能提供西校区乃至全校的导航功能,并实现最佳路线分析等空间分析能力,将其打造成长江大学服务大众和对外宣传的重要手 段。 1 系统实现环境与开发工具本系统软件开发环境是基于Windows NT平台,使用IIS5.0(InternetInformation Server)服务,以及Servlet Connectors的标准连接器,它使用ArcXML语言在WEB服务器与ArcIMS应用服务器之间进行通讯,客户端采用 ArcIMS Java Standard浏览器。在ArcIMS体系中,使用管理工具实现将要发布的地图的数据整理、网站设计以及网络服务的管理,它包括以下三部分: ArcIMS Author:用户通过它定义地图内容,包括添加数据图层,设置地图属性(包括图层显示方式,显示比例尺,建立查询和地理编码功能及增加描述地理要素的标注等),产生一个在线地图作为地图服 务。ArcIMS Author最终输出一个.axl格式的地图配置文件,它可以独立于ArcIMS平台用文本编辑器进行编辑,里面用HTML语言描述了输出地图的大体 框架和基本图层元素及其布局。ArcIMS Administrator:使用Author组织的数据建立地图服务,设置地图服务的属性以及地图服务的启动、停止等,用于管理IMS 的Server、VirtualServer和MapService,以及管 理IMS站点的配置信息,监视客户端等。ArcIMS Designer:使用Administrator建好的服务,生成一个网站,通过一系列对话框帮助用户选择 浏览器使用的地图服务、模板和功能,其输出结果为一系列HTML页面。 本系统开发过程中主要使用HTML语言来建立页面显示框架,使用VB Script 或Java Script脚本语言实现数据库的操作,其中数据库的操作大量使用了 https://www.doczj.com/doc/4c402807.html,网页变成语言中的对象,他们共同实现了导航系统的查询等功能。 2 系统设计 2.1 系统总体设计长江大学东校区导航系统
基于分布式环境下限流系统的设计
前提 业务背景 就拿前些天的双十一的“抢券活动”来说,一般是设置整点开始抢的,你想想,淘宝的用户群体非常大,可以达到亿级别,而服务接口每秒能处理的量是有限的,那么这个时候问题就会出现,我们如何通过程序来控制用户抢券呢,于是就必须加上这个限流功能了。 生产环境 1. 服务接口所能提供的服务上限(limit)假如是500次/s 2. 用户请求接口的次数未知,QPS可能达到800次/s,1000次/s,或者更高 3. 当服务接口的访问频率超过500次/s,超过的量将拒绝服务,多出的信息将会丢失 4. 线上环境是多节点部署的,但是调用的是同一个服务接口 于是,为了保证服务的可用性,就要对服务接口调用的速率进行限制(接口限流)。 什么是限流? 限流是对系统的出入流量进行控制,防止大流量出入,导致资源不足,系统不稳定。
限流系统是对资源访问的控制组件,控制主要的两个功能:限流策略和熔断策略,对于熔断策略,不同的系统有不同的熔断策略诉求,有的系统希望直接拒绝、有的系统希望排队等待、有的系统希望服务降级、有的系统会定制自己的熔断策略,这里只针对限流策略这个功能做详细的设计。 限流算法 1、限制瞬时并发数 Guava RateLimiter 提供了令牌桶算法实现:平滑突发限流(SmoothBursty)和平滑预热限流(SmoothWarmingUp)实现。 2、限制某个接口的时间窗最大请求数 即一个时间窗口内的请求数,如想限制某个接口/服务每秒/每分钟/每天的请求数/调用量。如一些基础服务会被很多其他系统调用,比如商品详情页服务会调用基础商品服务调用,但是怕因为更新量比较大将基础服务打挂,这时我们要对每秒/每分钟的调用量进行限速;一种实现方式如下所示:
捷联惯导系统从20世纪60年代初开始发展起来,在1969年,捷联惯导系统作为"阿波罗"-13号登月飞船的应急备份装臵,在其服务舱发生爆炸时将飞船成功地引导到返回地球的轨道上时起到了决定性作用,成为捷联式惯导系统发展中的一个里程碑。 捷联式惯性导航(strap-downinertialnavigation),捷联(strap-down)的英语原义是“捆绑”的意思。因此捷联式惯性导航也就是将惯性测量元件(陀螺仪和加速度计)直接装在导弹需要诸如姿态、速度、航向等导航信息的主体上,用计算机把测量信号变换为导航参数的一种导航技术。 一、捷联惯导系统工作原理及特点 惯导系统基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,之后将其变换到导航坐标系,得到在导航坐标系中的速度、偏航角和位臵信息等。 捷联惯导系统(SINS)是一种无框架系统,由三个速率陀螺、三个线加速度计和微型计算机组成。由于惯性元器件有固定漂移率,会造成导航误差,因此导弹通常采用指令、GPS或其组合等方式对惯导进行定时修正,以获取持续准确的位臵参数。如采用指令+捷联式惯导 捷联惯导系统能精确提供载体的姿态、地速、经纬度等导航参数,是利用惯性敏感器、基准方向及最初的位臵信息
来确定运载体的方位、位臵和速度的自主式航位推算导航系统。在工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰破坏。它完全是依靠载体自身设备独立自主地进行导航,它与外界不发生任何光、声、磁、电的联系,从而实现了与外界条件隔绝的假想的“封闭”空间内实现精确导航。所以它具有隐蔽性好,工作不受气象条件和人为的外界干扰等一系列的优点。 除此以外捷联惯导系统的最大特点是没有实体平台,即将陀螺仪和加速度计直接安装在机动载体上,在计算机中实时的计算姿态矩阵,通过姿态矩阵把导航加速度计测量的载体沿机体坐标系轴向的加速度信息变换到导航坐标系,然后进行导航计算。同时,从姿态矩阵的元素中提取姿态和航向信息.由此可见,在捷联惯导系统中平台的作用已由计算机及其软件的作用代替了,捷联式惯导系统采用的是数学平台。力学编排就是按照合适的数学模型由观测量计算出导航定位参数。具体地讲,利用陀螺仪测得的载体相对于惯性参照系的旋转角速度,计算出载体坐标系至导航计算坐标系之问的坐标转换矩阵;将测量的比力(加速度计测量载体相对于惯性空间的线加速度)变换至导航坐标系,并经过两次积分得到所需的速度位臵信息。 二、捷联惯导系统有以下独特优点: (1)去掉了复杂的平台机械系统,系统结构极为简单,
《分布式计算机系统》课程大纲 课程名称(中文):分布式计算机系统 课程名称(英文):Distributed Operating Systems 课程编码:Y0703033C 开课单位:电气信息学院 授课对象:硕士研究生 任课教师:贺鹏 学时:32 学分:2 学期:2 考核方式:撰写论文 先修课程:操作系统,计算机网络 课程简介: 一、教学目的与基本要求: 本课程是硕士研究生的学位课程,要求研究生对分布式计算机系统的工作原理和实现途径有较完整的了解,理解并掌握分布式系统中通信、同步、进程、线程、处理机、文件系统和存储器共享中的各种关键技术和算法,对当前的最新技术有一定了解。 二、课程内容与学时分配 1、课程主要内容: 1)分布式系统概论 2)分布式系统的通信 3)同步与互斥 4)进程和处理机 5)任务分配与负荷均衡 6)文件系统 7)共享存储器 8)DEC分布式操作系统实例分析 2、课程具体安排:(按教学章节编写,重点章节下划线)
三、教材及主要参考文献(顺序为:文献名,作者,出版时间,出版单位):教材: 分布式系统:原理与范例. (美)Andrew S. Tanenbaum编著. 2002. 清华大学出版社参考书: 1、分布式系统设计. (美) Jie Wu著. 2001. 机械工业出版社 2、分布式操作系统. (美)Doreen L.Galli著. 2002. 人民邮电出版社 3、分布式多处理机控制系统. 袁赣南,李金编著. 1998. 哈尔滨工业大学出版社4、分布式并行处理技术导论. 彭德纯著. 1996. 武汉大学出版社 撰写人:贺鹏 学位分委员会签字: 学院主管研究生教学院长签字:
简介 《大规模分布式系统架构与设计实战》从作者的实战经验出发,深入浅出地讲解了如何建立一个Hadoop那样的分布式系统,实现对多台计算机CPU、内存、硬盘的统一利用,从而获取强大计算能力去解决复杂问题。一般互联网企业的分布式存储计算系统都是个大平台,系统复杂、代码庞大,而且只适合公司的业务,工程师很难下载安装到自己的电脑里学习和吃透。本书对分布式核心技术进行了大量归纳和总结,并从中抽取出一套简化的框架和编程API进行讲解,方便工程师了解分布式系统的主要技术实现。这不是一本空谈概念、四处摘抄的书,这本书包含了大量精炼示例,手把手教你掌握分布式核心技术。 本书主要内容 分布式并行计算的基本原理解剖; 分布式协调的实现,包括如何实现公共配置管理,如何实现分布式锁,如何实现集群管理等; 分布式缓存的实现,包括如何提供完整的分布式缓存来利用多机内存能力; 消息队列的实现,包括如何实现发送和接收模式; 分布式文件系统的实现,包括如何像操作本地文件一样操作远程文件,并利用多机硬盘存储能力; 分布式作业调度平台的实现,包括资源隔离、资源调度等。 目录 第1章概述 1.1分布式计算、并行计算、云计算概述 1.2分布式产品Hadoop、ZooKeeper、HBase概述 1.3Fourinone的产生背景 第2章分布式并行计算的原理与实践 2.1分布式并行计算模式 2.1.1最初想到的master-slave结构 2.1.2“包工头-职介所-手工仓库-工人”模式 2.1.3基于消息中枢的计算模式 2.1.4基于网状直接交互的计算模式 2.1.5并行结合串行模式 2.1.6包工头内部批量多阶段处理模式 2.1.7计算集群模式和兼容遗留计算系统 2.1.8工人计算的服务化模式 2.2跟Hadoop的区别 2.3关于分布式的一些概念与产品 2.4配置文件和核心API介绍 2.5实践与应用 2.5.1一个简单的示例 2.5.2工头工人计算模式更完整的示例 2.5.3工人合并互相say hello的示例
惯性导航系统 一、惯性导航系统(Inertial Navigation System,INS) 1、基本概念 惯性导航系统(INS)是一种不依赖于外部信息、也不向外部辐射能量的自主式导航系统。其工作环境不仅包括空中、地面,还可以在水下。 惯性导航系统目前已经发展出挠性惯导、光纤惯导、激光惯导、微固 态惯性仪表等多种方式。陀螺仪由传统的绕线陀螺发展到静电陀螺、激光 陀螺、光纤陀螺、微机械陀螺等。激光陀螺测量动态范围宽,线性度好, 性能稳定,具有良好的温度稳定性和重复性,在高精度的应用领域中一直 占据着主导位置。由于科技进步,成本较低的光纤陀螺(FOG)和微机械陀螺(MEMS)精度越来越高,是未来陀螺技术发展的方向。我国的惯导技术 近年来已经取得了长足进步,液浮陀螺平台惯性导航系统、动力调谐陀螺 四轴平台系统已相继应用于长征系列运载火箭。其他各类小型化捷联惯导、光纤陀螺惯导、激光陀螺惯导以及匹配GPS修正的惯导装置等也已经大量应用于战术制导武器、飞机、舰艇、运载火箭、宇宙飞船等。如漂移率 0.01°-0.02°/h 的新型激光陀螺捷联系统在新型战机上试飞,漂移率 0.05°/h 以下的光纤陀螺、捷联惯导在舰艇、潜艇上的应用,以及小型化挠性捷联惯导在各类导弹制导武器上的应用,都极大的改善了我军装备的 性能。 惯性导航系统有如下主要优点:(1)由于它是不依赖于任何外部信息,也不向外部辐射能量的自主式系统,故隐蔽性好,也不受外界电磁干扰的 影响;(2)可全天流全球、全时间地工作于空中、地球表面乃至水下;(3)能提供位置、速度、航向和姿态角数据,所产生的导航信息连续性好而且 噪声低;(4)数据更新率高、短期精度和稳定性好。其缺点是:(1)由 于导航信息经过积分而产生,定位误差随时间而增大,长期精度差;(2)每次使用之前需要较长的初始对准时间;(3)设备的价格较昂贵;(4) 不能给出时间信息。但惯导有固定的漂移率,这样会造成物体运动的误差,因此射程远的武器通常会采用指令、GPS等对惯导进行定时修正,以获取持续准确的位置参数。 2、惯性导航原理 目前,惯性导航分为两大类:平台式惯导和捷联式惯导。它们的主要区别在于,前者有实体的物理平台,陀螺和加速度计置于由陀螺定的平台上,该平台跟踪导航坐标系,以实现速度和位置解算,姿态数据直接取自于平台的环架;在捷联式惯导中,陀螺和加速度计直接固连在载体上。惯性平台的功能由计算机完成,
煤矿机械Coal Mine Machinery Vol.34No.01 Jan.2013 第34卷第01期2013年01月 0引言 矿井机车通常用于井下生产资料、设备、人员的运输工作。与地面机车调度系统相比,井下空间有限,巷道狭窄,很难进行快速地错车;再加上调度手段相对简单、信息化程度较低,很容易造成道路拥挤、货物积压,从而对生产一线的采掘工作造成不良的影响。因此,有必要利用现代化的手段对矿井机车进行定位和管理,以降低事故发生率、提高煤矿生产效率。 目前,我国煤矿矿井机车监控系统多采用信号、集中、闭塞控制系统。该系统利用传统的点式传感技术测量机车位置并发送至调度中心,从而使调度员清楚地掌握机车位置,以便对道岔和信号机的开放进行集中控制。信集闭系统可以实现对机车的识别、定位,大大减少了机车碰撞事故的发生,提高了机车的运输效率,但是需要在机车轨道附近布置大量传感器,由于井下环境恶劣,电磁干扰严重,传感器容易出现故障,维护工作量较大;点式传感技术定位精确度较低,甚至会丢失机车位置。 视频测速技术可以按照摄像机安装的位置分为2种情况。 (1)摄像机安装在巷道内的固定位置为便于信息的处理,一般为矿机机车安装车牌,将地面常用的车牌识别技术应用于井下,通过对车牌进行图像处理,计算其在背景图像中的像素差来获取机车的速度,利用实时速度信息计算出机车所在位置。由于煤矿工作环境恶劣,湿度大、粉尘多,机车车牌很有可能处于被煤屑覆盖的状态,从而使得信息获取和处理的难度增大,因此,虽然该方法在理论上具有可行性,但其实用价值有待商榷。此外,由于摄像机价格相对较高,分布密度不会很大,必然会造成视频信息丢失的现象,从而降低了机车位置信息的实时性; (2)利用车载摄像机进行定位在机车上安装2台相同的摄像机用于采集巷道视频,然后分析图像特征,利用双目立体视觉测距技术来计算机车运行的实时速度。利用机载设备进行信息采集时,需要使用无线设备将采集到的信息传递至井下局域网,并利用光纤传递至地面调度室对视频信息进行处理,计算出机车的运行速度和所在位置。该方法减少了所使用摄像机的数量,并且能够获取可视化的视频信息,具有较好的发展前景。然而,该方法需要利用无线网络传输视频信息,这在无线通信环境极其恶劣的煤矿井下无疑是十分具有挑战性的。 通过以上分析可以发现,上述常用的机车定位方法不论是在理论上还是在实现上都存在一定的缺陷,因而有必要利用其他技术实现机车的定位,鉴于此,本文将捷联惯性导航系统(SINS)应用到井下机车的定位当中。SINS利用机载的加速度传感器、陀螺仪等设备获取机车的三维加速度、角速度信息,利用无线网络将信息传递至井下局域网,通过有线网络传递至地面调度室,使用SINS数学平台计算出机车的速度、位置、行驶方向和姿态信息。 捷联惯性导航系统在矿井机车定位中应用研究 袁小平,陈羲梅,鲍捷,池庆 (中国矿业大学信息与电气工程学院,江苏徐州221116) 摘要:介绍煤矿机车定位常用的信集闭系统以及2种视频测速定位技术,分析3种方法的优点和缺陷,并针对其所分析出的缺陷,提出将捷联式惯性导航系统引入到煤矿机车定位系统中。以SINS为核心的定位系统有较好的实时性,定位精度好,且易于实现。 关键词:捷联惯性导航;煤矿;机车定位 中图分类号:TP334;TD524文献标志码:B文章编号:1003-0794(2013)01-0208-02 Research of Step-down Inertial Navigation System Used in Mine Locomotive Localization YUAN Xiao-ping,CHEN Xi-mei,BAO Jie,CHI Qing (Information and Electrical Engineering Institute of China University of Mining and Technology,Xuzhou221116,China)Abstract:The article introduced the mine locomotive localization commonly used technologies block signals system and two speed measurements through video,analyzed the advantages and disadvantages of the three methods,and for the founding defects,put up that the step-down inertial navigation system is introduced into the coal mine locomotive localization system.Localization system taking SINS as the core has real-time performance,well location accuracy and easy to implement. Key words:step-down inertial navigation;coal mines;locomotive localization 208