
西安交通大学附属中学航天学校简单机械中考专项复习训练
一、选择题
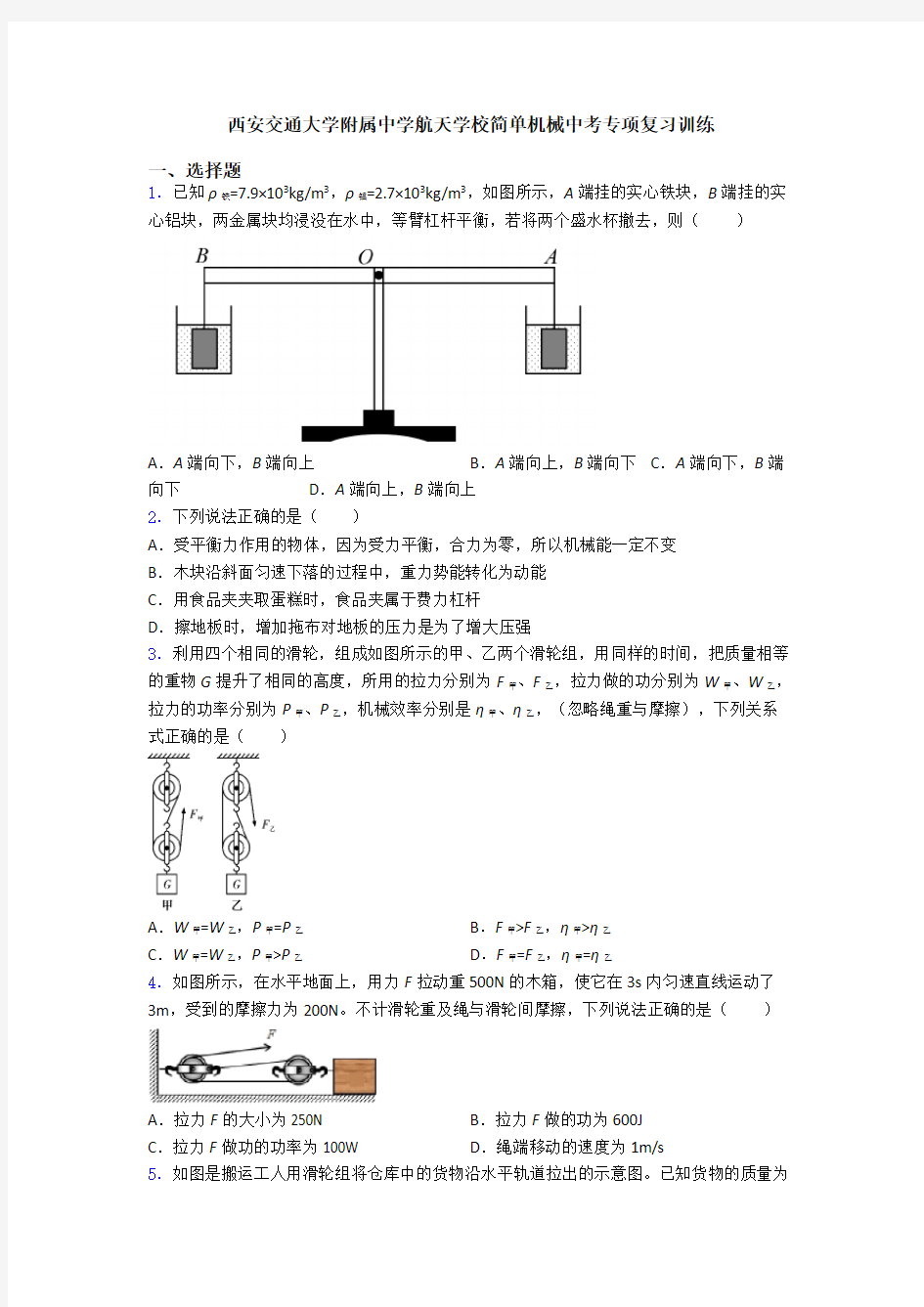
1.已知ρ铁=7.9×103kg/m3,ρ铝=2.7×103kg/m3,如图所示,A端挂的实心铁块,B端挂的实心铝块,两金属块均浸没在水中,等臂杠杆平衡,若将两个盛水杯撤去,则()
A.A端向下,B端向上B.A端向上,B端向下C.A端向下,B端向下D.A端向上,B端向上
2.下列说法正确的是()
A.受平衡力作用的物体,因为受力平衡,合力为零,所以机械能一定不变
B.木块沿斜面匀速下落的过程中,重力势能转化为动能
C.用食品夹夹取蛋糕时,食品夹属于费力杠杆
D.擦地板时,增加拖布对地板的压力是为了增大压强
3.利用四个相同的滑轮,组成如图所示的甲、乙两个滑轮组,用同样的时间,把质量相等的重物G提升了相同的高度,所用的拉力分别为F甲、F乙,拉力做的功分别为W甲、W乙,拉力的功率分别为P甲、P乙,机械效率分别是η甲、η乙,(忽略绳重与摩擦),下列关系式正确的是()
A.W甲=W乙,P甲=P乙B.F甲>F乙,η甲>η乙
C.W甲=W乙,P甲>P乙D.F甲=F乙,η甲=η乙
4.如图所示,在水平地面上,用力F拉动重500N的木箱,使它在3s内匀速直线运动了3m,受到的摩擦力为200N。不计滑轮重及绳与滑轮间摩擦,下列说法正确的是()
A.拉力F的大小为250N B.拉力F做的功为600J
C.拉力F做功的功率为100W D.绳端移动的速度为1m/s
5.如图是搬运工人用滑轮组将仓库中的货物沿水平轨道拉出的示意图。已知货物的质量为
600kg,所受轨道的摩擦力为其重力的0.1倍,滑轮组的机械效率为75%。若人以0.6m/s 的速度匀速前行,经100s将货物拉出仓库。人拉货物的过程中,分析正确的是()
A.货物移动距离为20m B.工人的拉力为400N
C.工人做的有用功为4
?D.工人拉力的功率为360W
3.610J
6.如图在水平力F的作用下,使重为G的木棒绕固定点沿逆时针方向转动,在棒与竖直方向的夹角θ逐渐增大的过程中,下列说法中正确的是()
A.拉力F不变,F的力臂变大
B.拉力F变大,F的力臂变小
C.重力G不变,G的力臂变小
D.重力G变小,G的力臂变大
7.如图所示的四幅图中,不正确的是
A.滑块被固定在光滑斜面底端的压缩弹簧弹出后沿斜面向上运动的过程中的受力示意图(略空气阻力)
B.近视眼成像情况和近视眼校正后成像情况
C.同名磁极(S)的磁场方向
D.吊桥所受拉力的力臂L1
8.如图所示,一根直硬棒被细绳系在O点吊起.A处挂一实心金属块甲,B处挂一石块乙时恰好能使硬棒在水平位置平衡.不计硬棒与悬挂的细绳质量,下列推断合理的是
A.甲的质量和密度都比乙大
B.O点绳子拉力一定等于甲、乙重力之和
C.如果甲浸没在水中,硬棒会逆时针转动
D.如果甲浸没在水中,要使硬棒水平平衡,可将乙向右移动
9.如图所示,重20N的物体A放在水平桌面上,(不计绳重及绳子与轮的摩擦)动滑轮
重6N,滑轮下面悬挂一个物体B,当物体B重8N时,恰能匀速下落,若用一个水平向左的力F A作用在物体A,使物体A向左做匀速直线运动,则此拉力F A的大小为
A.F A=8N
B.F A=20N
C.F A=14N
D.F A=7N
10.如图所示杠杆,力F方向始终竖直向上,当此杠杆在动力F作用下,将一个由细绳系的物体由图中位置逆时针匀速转动到水平位置时,则
A.F大小始终不变B.F先变大后变小
C.F先变小后变大D.无法判断F大小的变化
11.如图所示,在水平拉力F的作用下重100N的物体A,沿水平桌面做匀速直线运动,弹簧秤B的示数为10N,则拉力F的大小为()N,物体A与水平桌面的摩擦力大小
()N.
A.200N;10N B.200N;20N C.20N;10N D.20N;20N
12.如图所示,可绕O点转动的轻质杠杆,在D点挂一个重为G的物体M,用一把弹簧测力计依次在A,B,C三点沿圆O相切的方向用力拉,都使杠杆在水平位置平衡,读出三次的示数分别为F1、F2、F3,它们的大小关系是
A.F1<F2<F3<G B.F1>F2>F3>G C.F1=F2=F3=G D.F1>F2=F3=G
二、填空题
13.如图所示,不计质量的硬杆处于水平静止状态。O为支点,F A的力臂为L A。若撤去
F A,在B点施加力F B,硬杆仍可保持水平静止状态,且F B=F A,则F B的力臂
L B________L A(选填“>”、“<”、“=”);F B的方向________ (选填“是”或“不是”)唯一。
14.高速铁路的输电线,无论冬、夏都绷的直直的,以保障列车电极与输电线的良好接触。如图为输电线的牵引装置。钢绳通过滑轮组悬挂20个相同的坠砣,每个坠砣质量为25kg,不计滑轮和钢绳自重和摩擦,输电线A端受到的拉力大小为________N。若某段时间内坠砣串下降了30cm,则输电线A端向左移动了_______cm。(g取10N/kg,不考虑钢绳的热胀冷缩)
15.如图所示,工人师傅想把一个重800牛的油桶滚上一个台阶,他沿最省力的方向推动油桶.在图中画出这个力的力臂________,这个力的大小是________ N(支点O已在图中给出且支点O与圆心等高).
16.如图所示,甲、乙两套装置中,每个滑轮的质量相等,绳重和摩擦忽略不计.用甲装置把重为 100N 物体 G 升高 2m,所用拉力为 62.5N,甲、乙装置的机械效率分别η1、η2,则η1= ___;若用乙装置提相同的重物,则拉力 F2 ___F1(选填“>”、“<”或“=”,下同),机械效率η2________η1。
17.如图所示,搬运工人用滑轮将重为425 N的重物匀速提升4m,所用拉力为250N,时间为20s.则此过程中总功是______J,拉力的功率是______W,滑轮的机械效率是
______.
18.如图所示,在水平拉力F的作用下重100 N的物体A,沿水平桌面做匀速直线运动,弹簧秤B的示数为10 N,则拉力F的大小为_____N,物体A与水平桌面的摩擦力大小为_____ N.
19.如图所示,0为轻质杠杆AC的支点,在B处挂一小球,小球的重力30N,AO=OB=BC,在杠杆上施加最小动力F,使杠杆在水平位置平衡.画出F的示意图________,此时F =________ N.
20.如图所示,不计重力的杠杆OB可绕O点转动,重为10N的重物P悬挂在杠杆的中点A处,拉力F1与杠杆成30°角,杠杆在水平位置保持平衡,根据杠杆的平衡可求出拉力的大小F1=________ N;若仅增大拉力F1与杠杆间的夹角,其它条件保持不变,则拉力F的大小变化规律是________ .
三、实验题
21.小明利用如图所示的装置探究杠杆平衡条件。
(1)为排除杠杆自重对实验的影响,实验前把杠杆中心支在支架上,杠杆静止在图甲所示位置,此时应将杠杆右端的螺母向________调节(填“左”、“右”),使杠杆在水平位置达到
平衡。这样做的目的是___________。
(2)实验时,小明在杠杆左侧A位置(左边位置第四格)先挂了3个钩码,如图乙,则在右侧B位置(右边位置第三格)应挂________个相同规格的钩码,杠杆可以重新在水平位置平衡。
(3)如图丙,小明在A位置挂一个弹簧测力计,在B位置挂了2个钩码。现将弹簧测力计从C位置移到D位置,在此过程中杠杆始终在水平位置保持平衡,则弹簧测力计示数
________(选填“变大”、“变小”或“不变”),原因是_____________。
22.在测量“滑轮组机械效率”的实验中,小明用如图所示的同一滑轮组提升不同钩码的方法,实验数据记录如下表:
实验次数钩码的重力G/N 钩码提升高度
h/m
拉力F/N绳端移动的距离s/m机械效率η/%
120.05 1.00.1566.7 220.1 1.00.366.7 340.05 1.70.1578.4 460.05①0.15②
(1)第4次实验时的情景如图丙所示,则表格中①处的数据应为______,②处的数据应为
______;
(2)比较______两次实验,小组同学发现:同一滑轮组的机械效率与重物被提升高度______(选填“有关”或“无关”);
(3)分析以上实验可以得出结论:同一滑轮组的机械效率主要与______有关;
(4)将滑轮组换另一种绕绳方法,提升相同的物体时,若不计摩擦和绳重,滑轮组的机械效
率______。(选填“变大”、“变小”或“不变”)
23.如图所示,是小王利用刻度均匀的杠杆进行探究“杠杆的平衡条件”。
(1)实验前,将杠杆的中点置于支架上,当杠杆静止时杠杆左端下沉,这时应将平衡螺母向___(左/右)端调节,直到杠杆在水平位置平衡;
(2)如图甲所示,在杠杆A点处挂4个钩码,则在B点处应挂____个同样的钩码,杠杆仍然在水平位置平衡;
(3)如果小王又进行了如图乙所示的探究,发现用弹簧测力计在C点竖直向上拉使杠杆仍然处于水平位置平衡时,F×OC____G×OD;(选填“大于”、“小于”或“等于”)
(4)如图丙是根据“杠杆平衡条件”制作的只需要一个砝码的天平,横梁可绕轴O在竖直平面内转动,左侧为悬挂在固定位置P的置物盘,右侧所用砝码是实验室里常见的钩码,用细线挂在右侧带刻度线的横梁上。
①下面是小明测量物体质量的几个主要步骤,最合理的顺序是(只填序号):________ A.将天平放在水平台面上时
B.调整横梁右侧的平衡螺母使横梁上悬挂的重垂线对准底座上的标记
C.将悬挂钩码的细线移到右侧横梁的零刻线Q处
D.由细线在横梁上的位置对应的刻度值直接得出物体的质量
E.将待测物体放在天平左侧的置物盘中
F.移动悬挂钩码的细线使横梁上悬挂的重垂线对准底座上的标记
②调节天平至水平位置平衡后,刚把待测物体放在天平左侧的置物盘中时,横梁上悬挂的重垂线将对准底座上标记的________侧(填“左”或“右”)。
24.如图所示,下面是某同学做探究“斜面的机械效率与斜面的粗糙程度、斜面的倾斜程度的关系”实验时,得到如下实验数据。
斜面与水平夹角小车的
重力
G/N
斜面的
粗糙程
度
斜面的
高度
h/m
沿斜面
拉力
F/N
斜面长
s/m
有用功
W有/J
总功W
总
/J
机械效
率
η/%
20° 2.1玻璃面0.090.60.50.1890.3063 30° 2.1玻璃面0.21 1.10.50.4410.5580.2
45° 2.1玻璃面0.36 1.80.5
45° 2.1棉布面0.36 2.00.50.756 1.0075.6
(1)此探究实验是采用了_____________的物理研究方法。
(2)请将上表中空格补充完整_____________。
(3)请你根据表中的实验数据,得出要探究的实验结论:
结论一:___________________________。
结论二:__________________________。
25.某同学用定滑轮和弹簧秤完成了以下几个实验:
(1)如图A所示,甲物体重3N,乙物体重10N,用绳绕过定滑轮相连(不计绳重与摩擦).乙静止于水平地面上,则a绳对甲的拉力为______N.
(2)在分析b绳对乙的拉力时,小明认为是3N,小慧认为是7N.
a.小明做了以下实验:用弹簧测力计测出某物体的重力(如图B);然后将绳子靠着定滑轮(不计绳重与摩擦),如图C所示,弹簧测力计依次放在A、B、C、D位置时,其示数保持不变.由此可见,定滑轮只改变了力的____,不改变力的_____(均选填“大小”或“方向”).所以,小明认为图A中b绳对乙的拉力为3N.
b.图A中b绳对乙的拉力和乙对b绳的拉力是一对相互作用力.为了探究这两个力的大小关系,再做如图D的实验:将弹簧测力计丙与丁相互对拉,它们的示数相等.
于是可以得出,b绳对乙的拉力______乙对b绳的拉力(选填“等于”或“不等于”).由此可知,图A中b绳对乙的拉力为______N.
26.在“探究影响滑轮组机械效率的因素”实验中,某同学用图所示的同一滑轮组分别做了三次实验,实验数据记录如表:
实验序号钩码
重/N
钩码上升
的距离/cm
弹簧测力计的
读数/N
弹簧测力计上
升的距离/cm
机械效率
1280.82483.3%
245 1.515①______
3610②______③______90.9%
(2)在实验操作中,应竖直向上______拉动弹簧测力计;
(3)从实验数据分析可得出:使用同一滑轮组,______可以提高滑轮组的机械效率;
(4)滑轮组的机械效率可能还与其它因素有关,请你做出恰当的猜想:滑轮组的机械效率可
能还与______有关(写出一种影响因素即可);
(5)若不考虑绳重的摩擦,本实验序号1中动滑轮的重为______N 。
【参考答案】***试卷处理标记,请不要删除
一、选择题 1.B 解析:B 【分析】 【详解】
铁块和铝块浸没在水中时,杠杆平衡,根据杠杆平衡条件得
(G 铁-F 浮铁)l =(G 铝-F 浮铝)l
所以
ρ铁gV 铁-ρ水gV 铁=ρ铝gV 铝-ρ水gV 铝
即
(ρ铁-ρ水)gV 铁=(ρ铝-ρ水)gV 铝
333333332.710kg/m 1.010kg/m 1.7
7.910kg/m 1.010kg/m 6.9
V V ρρρρ-?-?===-?-?铝水铁铝铁水 解得
V 铁=
1.7
6.9
V 铝 当将两个盛水杯去掉,杠杆右端
G 铁l =ρ铁gV 铁l =ρ铁g ?
1.76.9V 铝l =7.9×103kg/m 3×g ?1.7
6.9
V 铝l =1.95×103kg/m 3?gV 铝l 杠杆左端
G 铝l =ρ铝gV 铝l =2.7×103kg/m 3?gV 铝l
所以
G 铝l >G 铁l
挂铝块的B端下沉,挂铁块的A端上翘。故ACD不符合题意,B符合题意。
故选B。
【点睛】
2.C
解析:C
【分析】
(1)(2)动能大小的影响因素:质量、速度。质量越大,速度越大,动能越大;势能大小的影响因素:质量和高度。质量越大,高度越高,势能越大;机械能是动能与势能之和;(3)省力杠杆,动力臂大于阻力臂,省力但费距离;费力杠杆,动力臂小于阻力臂,费力但省距离;等臂杠杆,动力臂等于阻力臂,既不省距离也不省力;
(4)增大摩擦力的方法:在接触面粗糙程度一定时,通过增大压力来增大摩擦力;在压力一定时,通过增大接触面的粗糙程度来增大摩擦力。
【详解】
A.物体在平衡力作用下,保持静止或匀速直线运动;当物体静止时,动能、重力势能和机械能都不变;当物体做匀速直线运动时,动能不变,但物体可能水平运动,也可能不是水平运动;物体水平方向做匀速直线运动时,动能不变,重力势能不变,机械能不变;物体不是水平方向,而做匀速上升、或匀速下降时,动能不变,重力势能要改变,机械能改变;所以一个物体受到平衡力的作用,动能一定不变,势能可能改变,机械能可能改变,故A错误;
B.木块沿斜面匀速下落的过程中,质量不变,速度不变,动能不变,高度减小,重力势能减小,不是重力势能转化为动能,故B错误;
C.用食品夹夹取蛋糕时,食品夹的动力臂小于阻力臂,为费力杠杆,故C正确;
D.擦地板时,增加拖布对地板的压力是在接触面粗糙程度一定时,通过增大压力来增大摩擦力。故D错误。
故选C。
3.A
解析:A
【详解】
AC.因忽略绳重与摩擦时,克服物体重力做的功为有用功,克服物体和动滑轮总重力做的功为总功,且两物体提升相同高度,所以,由W=Gh可知,F甲、F乙做的总功均相等,故W甲=W乙,又因为时间相同,故P甲=P乙,故A正确C错误;
BD.由图可知,甲滑轮组绳子的有效股数n1=3,乙滑轮组绳子的有效股数n2=2,由题意可知,两滑轮组中动滑轮的重力相等,且提升物体的重力相等,所以,忽略绳重与摩擦时,
由
G G
F
n
+
=动可知,F甲 故选A。4.B 解析:B 【详解】 A .阻碍木箱运动的力为摩擦阻力,大小为200N ;有两段绳子与动滑轮接触,所以绳子自由端拉力的大小为 200N 100N 2 F = = A 选项错误,不符合题意 B .物体运动了3m ,两段绳子与动滑轮接触,绳子自由端移动的距离为 23m 6m s =?= 拉力做的功为 100N 6m 600J W Fs ==?= B 选项正确,符合题意 C .拉力做功的功率为 600J 200W 3s W P t = == C 选项错误,不符合题意 D .绳子自由端移动的速度为 6m 2m/s 3s s v t = == D 选项错误,不符合题意 故选B 。 5.B 解析:B 【详解】 A .从图中可以看到,两条绳子托着动滑轮,人以0.6m/s 的速度匀速前行,那么货物的速度是0.3m/s ,经100s 货物移动距离为 0.3m/s 100s 30m s vt ==?= 货物移动距离为30m ,A 错误; B .由题意可知,货物的重力 600kg 10N/kg 6000N G mg ==?= 其摩擦力 0.10.16000N 600N f G ==?= 由于货物匀速前行,绳对货物的拉力 600N F f == 滑轮组的机械效率为75%,可得到 600N 100%75%2s F s η?= ?=?拉 解得400N F =拉,工人的拉力为400N ,B 正确; C .货物移动距离为30m ,绳对货物的拉力为600N ,则工人做的有用功为 4600N 30m 1.810J W Fs ==?=?有 工人做的有用功为41.810J ?,C 错误; D .由于人以0.6m/s 的速度匀速前行,工人的拉力为400N ,工人拉力的功率为 '400N 0.6m 240W P F v ==?=拉 工人拉力的功率为240W ,D 错误。 故选B 。 6.B 解析:B 【详解】 设杠杆长为l ,由力臂的定义可知,水平力F 的力臂 1 l lcos θ 木棒重力的力臂 2sin l l θ= 随着夹角逐渐增大,F 的力臂越来越小,木棒重力的力臂越来越大,根据杠杆平衡条件 1122Fl F l =得 12Fl Gl = 重力大小不变,因此水平力F 变大,故B 正确。 故选B 。 7.A 解析:A 【解析】 【分析】 (1)对滑块进行受力分析,根据光滑斜面可得,滑块不受摩擦力作用,因此滑块只受重力和支持力作用; (2)近视眼成因:眼球晶状体的曲度过大,远处物体反射来的光线通过晶状体折射后形成的物像,就会落在视网膜的前方造成近视眼。近视矫正方法,需佩戴凹透镜。 (3)磁感线都是从北极出发回到南极; (4)力臂的概念:力臂是指从支点到力的作用线的距离。 【详解】 A 、滑块被固定在光滑斜面底端的压缩弹簧弹出后沿斜面向上运动,是因为滑块具有惯性,因为斜面光滑,所以不受摩擦力的作用,只受到竖直向下的重力和垂直于斜面向上的支持力作用,故A 错误; B 、近视眼成因:眼球晶状体的曲度过大,远处物体反射来的光线通过晶状体折射后形成的物像,就会落在视网膜的前方造成近视眼。近视矫正方法,需佩戴凹透镜。故B 正确; C 、在磁体外部,磁感线的方向都是从N 极出发回到S 极,故C 正确; D 、由图可知,杠杆的支点为C ,吊桥所受拉力的力臂是从C 到拉力作用线的垂线段,故D 正确。 故选:A 。 8.B 解析:B 【解析】 A. 根据杠杆的平衡条件知,OA>OB ,所以F A B. 图中杠杆保持静止,受力平衡,所以O 点绳子向上的拉力一定等于甲、乙重力之和,故B 正确; C. 如果甲浸没在水中,受到浮力的作用,F A 会减小,硬棒会顺时针转动,故C 错误; D. 如果甲浸没在水中,受到浮力的作用,F A 会减小,L A 不变,F B 不变,根据杠杆平衡条件得,要使硬棒水平平衡,L B 应减小,即可将乙向左移动,故D 错误; 故选B . 9.C 解析:C 【解析】 分析:(1)根据滑轮组的省力情况,已知物体B 和动滑轮的重力、绳重以及滑轮轮轴间摩擦,可求出绳子自由端的拉力,物体A 匀速运动,拉力和摩擦力是一对平衡力,可知物体A 所受摩擦力大小; (2)若用一水平向左的力F 拉动物体A ,拉力F 的大小等于物体A 所受摩擦力与绳子自由端的拉力之和. 解答:承担物B 重的绳子股数是2,绳子自由端的拉力: 1186722 B F G G N N N '=+=?+=动()(),对物体A 的拉力为7N ,方向是水平向右的; 物体A 匀速运动,水平向右的拉力和摩擦力是一对平衡力,物体A 所受摩擦力: 7f F N ='=,方向水平向左;用一水平向左的力F 拉动物体A ,拉力: 7714F f F N N N =+'=+= ,故C 正确. 故选C . 【点睛】本题考查了动滑轮的特点,静止的物体和匀速直线运动的物体受到平衡力的作用,根据二力平衡的条件进行分析,关键需要分清A 物体的受力情况,有点难度. 10.A 解析:A 【解析】 如图,当杠杆匀速转动到水平位置时, 因为动力、阻力作用点不变, 所以 OA OC OB OD L L L L =不变; 又因为阻力(物重G 不变),由OB OA L F L G =得: OA OB L G F L =. 所以当杠杆匀速转动到水平位置时,动力F 的大小不变. 所以A 选项是正确的. 【点睛】画出动力臂和阻力臂,杠杆的动力臂与阻力臂的大小关系不变,而阻力臂不变,由杠杆的平衡条件可以知道动力不变. 11.C 解析:C 【解析】 解答本题需掌握物体A 匀速运动,受到的合力为零,故A 物体所受拉力和摩擦力相等;动滑轮上有两段绳子,拉力F 是A 所受摩擦力的2倍. 解答: 如图所示,弹簧测力计B 测出了动滑轮上的绳子上的拉力为10N ;又因为动滑轮上承担物重的两段绳上的力是相等的,所以A 受到拉力为10N ;又因物体A 做匀速直线运动,则物体A 与水平桌面的摩擦力与物体A 受到拉力是一对平衡力,则摩擦力大小也是10N ; 拉力F=2f=2×10N=20N. 故选C. 12.C 解析:C 【解析】 试题分析:利用杠杆平衡条件分析,当阻力和阻力臂不变时,如果动力臂不变,只改动用力方向,其动力不变,据此分析解答. 解:设拉力的力臂为L ,则由题意可知,当杠杆在水平位置平衡时:G×OD=F×L 由此可得:F= 因为G ,OD 不变,OD=L=r ,故F=G ,由于F 1、F 2、F 3的力臂都为圆的半径,相等,故F 1=F 2=F 3=G 故选:C 【点评】此题主要考查学生对于杠杆平衡问题的分析能力,此题关键是力臂的确定. 二、填空题 13.= 不是 【解析】 【详解】 第一空.在B 点施加力FB , 硬杆仍可保持水平静止状态,若FB=FA , 根据杠杆平衡条件,可知,LB=LA ; 第二空.因为力与力臂垂直,由图像可知F 解析:= 不是 【解析】 【详解】 第一空.在B点施加力F B,硬杆仍可保持水平静止状态,若F B=F A,根据杠杆平衡条件,可知,L B=L A; 第二空.因为力与力臂垂直,由图像可知F B方向不唯一。 14.15 【解析】分析:(1)知道钢绳通过滑轮组悬挂20个相同的坠砣,每个坠砣质量为25kg,可以知道坠砣的总质量,再利用重力公式G=mg计算总重力;滑轮的轴固定不动的叫定滑轮,轴随物体一起运动的滑轮叫 解析:15 【解析】分析:(1)知道钢绳通过滑轮组悬挂20个相同的坠砣,每个坠砣质量为25kg,可以知道坠砣的总质量,再利用重力公式计算总重力;滑轮的轴固定不动的叫定滑轮,轴随物体一起运动的滑轮叫动滑轮,据此判断;G相当于物重,F为A端受到的为拉力,根据图得出n=2,不计滑轮和钢绳自重和摩擦,可以得出F=2G; (2)根据公式求出输电线A端向左移动的距离; 解答:(1),,根据图得出n=2,不计滑轮和钢绳自重和摩擦,可以得出A端受到的拉 ; (2)某段时间内坠砣串下降了30cm,所以输电线A端向左移动的距离为 ; 故答案为:(1). 104 (2). 15 【点睛】本题综合了重力知识、质量知识、滑轮组的知识来解决实际问题,其中判断绳子的股数是关键。 15.【解析】 如图支点在O点,当以圆的直径为力臂时,力臂最长,最省力,所以力的作用点在O与圆的连线所在的直径与圆左侧的交点,垂直于此直径向上施力最省力,如图力臂: 如图,动力臂为直径,动力臂为半径,根 解析: 【解析】 如图支点在O 点,当以圆的直径为力臂时,力臂最长,最省力,所以力的作用点在O 与圆的连线所在的直径与圆左侧的交点,垂直于此直径向上施力最省力,如图力臂: 如图,动力臂为直径,动力臂为半径,根据杠杆平衡条件得: ,解得, . 点睛:作杠杆上的最小动力F ,是常考的内容之一,方法是先确定力的作用点,以此作用点到支点的距离作为力臂,此时力臂最长,即力垂直于此连线时最省力. 16.80% < = 【解析】 根据动滑轮的性质可知物体上升2m ,绳子上升4m ,根据;人做的有用功;根据 ;由图可知,甲图中滑轮组绳子的有效股数为n1=2;乙图中滑轮组绳子的有效股数为 解析:80% < = 【解析】 根据动滑轮的性质可知物体上升2m ,绳子上升4m ,根据 62.54250W Fs N m J ==?=总;人做的有用功1002200W Gh N m J ==?=有;根据 200100%80%250W J W J η= = ?=有总 ;由图可知,甲图中滑轮组绳子的有效股数为n 1=2;乙图中滑轮组绳子的有效股数为n 2=3,因为每个滑轮的质量均相等,所以每个滑轮的重力相等, 忽略绳重和摩擦,由1 F G G n =+物动(),可得,121123 F G G F G G =+=+动动(),();所以,F 1>F 2;比较甲、乙两个滑轮组可知,动滑轮重相同,提升的物体重和高度相同, W G h W G h 额轮有用物,==,利用滑轮组做的有用功相同、额外功相同,总功相同,根据 W W η= 有 总 可知,两个滑轮组的机械效率相同,即:ηη=甲乙. 故答案为:80%;<;=. 【点睛】本题考查了使用滑轮组时绳子有效股数的确定,有用功、额外功、总功、机械效率的计算,不计摩擦和绳重时拉力的求法;本题关键在于确定额外功相等。 17.100 85% 【解析】 工人做的有用功: W有用=Gh=425N×4m=1700J, 因为使用的是动滑轮,所以拉力移动的距离s=2h=2×4m=8m, 工人做的总功: W总=Fs=2 解析:100 85% 【解析】 工人做的有用功: W有用=Gh=425N×4m=1700J, 因为使用的是动滑轮,所以拉力移动的距离s=2h=2×4m=8m, 工人做的总功: W总=Fs=250N×8m=2000J, 所以,W额外=W总-W有用=2000J-1700J=300J, 拉力的功率: 2000J 100W 20s W P t === 总; 动滑轮的机械效率: 1700J 100%100%85% 2000J W W η=?=?= 有用 总 . 故答案为 (1). 2000 (2). 100 (3). 85% 18.10 【解析】 如图所示,弹簧测力计B测出了动滑轮上的绳子上的拉力为10N;则物体A受到拉力为10N;又因物体A做匀速直线运动,则物体A与水平桌面的摩擦力与物体A受到拉力是一对平衡力,则摩擦 解析:10 【解析】 如图所示,弹簧测力计B测出了动滑轮上的绳子上的拉力为10N;则物体A受到拉力为10N;又因物体A做匀速直线运动,则物体A与水平桌面的摩擦力与物体A受到拉力是一对平衡力,则摩擦力大小也是10N; 拉力F=2f=2×10N=20N. 故答案为20;10. 19.15N 【详解】 最小力作图:找离支点最远的点,图中C 点离O 最远,故作用点在C 点,过C 作OC 的垂线,如图所示.由杠杆的平衡条件,,. 解析: 15N 【详解】 最小力作图:找离支点最远的点,图中C 点离O 最远,故作用点在C 点,过C 作OC 的垂线,如图所示.由杠杆的平衡条件1122Fl F l =,1F OC GOB =,130N 15N GOB OB F OC OC ?= ==. 20.先变小后变大 【解析】 试题分析:先过支点作拉力F1的力臂,然后根据直角三角形30°角对应的直角边等于斜边的一半(即杠杆OA 长度的一半); 已知F1的力臂、物体对杠杆向下的拉力和对应的力臂, 解析:先变小后变大 【解析】 试题分析:先过支点作拉力F 1的力臂,然后根据直角三角形30°角对应的直角边等于斜边的一半(即杠杆OA 长度的一半); 已知F 1的力臂、物体对杠杆向下的拉力和对应的力臂,根据杠杆平衡的条件即可求出拉力的大小. 根据F 1与杠杆间的夹角为90°时力臂最大,所以拉力的力臂先变大后变小,再利用杠杆平衡的条件分析拉力的变化. 解:过支点作拉力F 1的力臂OC ,如图所示: 从图中可以看出,OBC 为直角三角形,而直角三角形30°角对应的直角边等于斜边的一半,故拉力F 1的力臂为 ; 又因为作用在杠杆A 处的拉力大小等于物重10N ,对应的力臂等于,且作用在杠杆上 的动力臂等于阻力臂,所以动力等于阻力,即F 1=G=10N . 因为当F 1与杠杆间的夹角为90°时,对应的力臂最大,所以L 1先变大后变小; 根据杠杆平衡的条件可得:,即阻力与阻力臂的乘积不变,而L 1先变大后 变小,故F 1先变小后变大. 故答案为10,先变小后边大. 【点评】本题考查直角三角形角和边的关系以及杠杆平衡条件掌握情况. 三、实验题 21.右 便于测量力臂 4 变小 见解析 【详解】 (1)[1]杠杆静止时,杠杆左端下沉,说明右端偏高,平衡螺母需向右调节。 [2]杠杆在水平位置平衡的目的是便于测量力臂。 (2)[3]一个钩码的重力为G ,设杠杆一个小格代表L ,根据杠杆平衡条件1122Fl F l =可得 343G L nG L ?=? 解得 4n = 故应挂4个钩码。 (3)[4][5]将弹簧测力计从C 位置移到D 位置弹簧测力计示数变小,这是因为在C 位置处,是由弹簧测力计拉力竖直方向上的分力提供动力,而到了D 位置,弹簧测力计的拉力全部提供动力,故需要一个较小的力,故示数变小。 22.4 83.3 1和2 无关 被提升物体的重力 不变 【详解】 (1)[1][2]由图丙可知,弹簧测力计的分度值为0.2N ,则第4次实验中拉力的大小为2.4N ,第4次实验中滑轮组的机械效率为 6N 0.05m 100%100%100%83.3% 2.4N 0.15m W Gh W Fs η?= ?= ?=?≈?有总 (2)[3][4]比较第1、2两次实验数据可知,两次实验时的效率相同,提升的高度不同,因此同一滑轮组的机械效率与重物被提升高度无关。 (3)[5]实验中用的是同一滑轮组,动滑轮的重力不变,提升物体的重力不同;由表中实验数据可知,同一滑轮组提起不同重力的物体时,提升物体的重力越大,滑轮组的机械效率越大,故可得结论:同一滑轮组的机械效率主要与被提升物体的重力有关。 (4)[6]因不计摩擦及绳重,克服物体重力做的功为有用功,克服动滑轮重力和物体重力做的功为总功,所以,由 100%100%100%100% W W Gh G W W W Gh G h G G η= ?= ?= ?=?+++有有总有额动动 可知,将此滑轮组换一种绕绳方法,不计摩擦及绳重,提升相同的物体时,滑轮组的机械效率不变。 23.右 6 大于 ACBEFD 左 【解析】 【详解】 第一空.杠杆静止时杠杆左端下沉,为使杠杆在水平位置平衡,应向右调节平衡螺母; 第二空.设一个钩码的重力为G ,杠杆一小格的长度为L ,则由杠杆平衡条件1122Fl F l =可得: 24362G L F G L ?= = 即需要在B 点处应挂6个同样的钩码; 第三空.由图乙可知支点位置位于杠杆右侧,因此杠杆在水平位置平衡时不能排除杠杆自重的影响,因此F ×OC 大于G ×OD ; 第四空.A .将天平放在水平台面上; C .将悬挂钩码的细线移到右侧横梁的零刻线Q 处(相当于游码回零); B .调整横梁右侧的平衡螺母使横梁上悬挂的重垂线对准底座上的标记(相当于移动平衡螺母使指针指到分度盘的中央位置); E .将待测物体放在天平左侧的置物盘中(相当于左盘放物体); F .移动悬挂钩码的细线使横梁上悬挂的重垂线对准底座上的标记(相当于增减砝码或移动游码使天平重新平衡); D .由细线在横梁上的位置对应的刻度值直接得出物体的质量; 第五空.调节天平至水平位置平衡时,横梁上悬挂的重垂线将对准底座上标记;把待测物体放在天平左侧的置物盘中时,则左盘下降,横梁上悬挂的重垂线将对准底座上标记的左侧。 24.控制变量法 0.756;0.9;84 斜面的光滑程度相同时,斜面的倾斜角度越大(小),机械效率越高(低) 斜面的倾斜高度相同时,斜面的表面越粗糙(光滑),机械效率越低(高) 【详解】 (1)[1]从实验记录表中可以看出,实验的因素比较多有斜面的夹角、斜面的粗糙程度、斜面的高度、斜面的长度等多个因素,有些因素相同,有些因素不同,这正是控制变量法思想的体现。 (2)[2]有用功 W 有用=Gh =2.1N×0.36m=0.756J 总功 W 总=Fs =1.8N×0.5m=0.9J 机械效率 η=W W 有用总=0.756J 0.9J ×100%=84% (3)[3][4]斜面的倾斜程度通过斜面与水平面的夹角体现,夹角越大斜面的倾斜程度越大,分析第1、2、3组实验数据可知,斜面的光滑程度相同时,斜面的斜面的倾斜角度越大,机械效率越高;分析第3、4两组实验数据可知,斜面的倾斜高度相同时,斜面的表面越粗糙,机械效率越低。 西安交通大学附属中学数学分式填空选择专题练习(解析版) 一、八年级数学分式填空题(难) 1.已知x 2﹣4x ﹣5=0,则分式 265x x x --的值是_____. 【答案】2 【解析】 试题分析:根据分式的特点,可变形为22665453x x x x x x x =----+,然后整体代入可得623x x =. 故答案为2. 2.若关于x 的分式方程 321 x m x -=-的解是正数,则m 的取值范围为_______. 【答案】m >2且m ≠3 【解析】 解关于x 的方程 321 x m x -=-得:2x m =-, ∵原方程的解是正数, ∴20210m m ->??--≠? ,解得:2m >且3m ≠. 故答案为:2m >且3m ≠. 点睛:关于x 的方程321 x m x -=-的解是正数,则字母“m ”的取值需同时满足两个条件:(1)2x m =-不能是增根,即210m --≠;(2)20x m =->. 3.若关于x 的分式方程 333x a x x +--=2a 无解,则a 的值为_____. 【答案】1或 12 【解析】 分析:直接解分式方程,再利用当1-2a=0时,当1-2a≠0时,分别得出答案. 详解:去分母得: x-3a=2a (x-3), 整理得:(1-2a )x=-3a , 当1-2a=0时,方程无解,故a= 12; 当1-2a≠0时,x=312a a --=3时,分式方程无解, 则a=1, 故关于x 的分式方程 333x a x x +-+=2a 无解,则a 的值为:1或12. 故答案为1或12 . 点睛:此题主要考查了分式方程的解,正确分类讨论是解题关键. 4.化简: 224a a -﹣12a -=_____. 【答案】 12a + 【解析】 【分析】原式通分并利用同分母分式的减法法则计算,约分即可得到结果. 【详解】原式=()()()()222222a a a a a a +-+-+- =()()222a a a -+- =12 a +, 故答案为: 12a +. 【点睛】本题考查了分式的加减法,熟练掌握分式加减法的运算法则是解本题的关键. 5.如果x+1x =3,则2 4233 x x x ++的值等于_____ 【答案】 122 【解析】 【分析】 由x +1x =3得x 2+2+21x =9,即x 2+21x =7,整体代入原式=221331x x ++=22 1131x x ++(),计算可得结论. 【详解】 解:∵x +1x =3,∴(x +1x )2=9,即x 2+2+21x =9,则x 2+21x =7. ∵x ≠0,∴原式=22 1 331x x ++ 第一个人:我报考的是西安交大机械学院的博士生,只考一门英语,主要内容就是英汉互译。如果平时看的文献较多,且对专业术语了解较好,那翻译部分基本就没问题了,不过文字的表述还是非常重要的。英译汉部分有一题是关于机械加工方法的,另外两题记不清具体内容了。汉译英部分有两题,其中一题是关于数控机床方面的,另外一题是关于激光金属直接成形方面的。 还有一个大题,简述硕士期间的工作成果以及实际应用价值,用英文,要求250字以内。 考试时间是3小时,时间刚好够用,英译汉后面两题做的不好。 大概内容就这些,希望大家多多交流…… 第二人 回忆不太全,希望大家补充西交机械专业的英语近几年已经取消,04年是马玉录、刘东学主编的教材(化学工业出版社),这是我到西交读博事才知道的。不过结合我考试的题目来看,看这本书的作用不是很大,我也没看过这本书,考试题目遍及了许多机械、材料,机械电子、信息、能量、科幻的知识。例外,考博是可以带电子词典的,大家做题时不要惊慌,先把会做的做好,我考试成绩为66分,估计及格线在50分以上,祝大家考博顺利,也希望大家考博成功以后能多发paper。 下面是回忆的题型 一共四道大题,包括7个小题,其中第7道题是对硕士阶段所做工作总结,为选做题,不计入总分。 第一大题是撰写专业英语,包括2小题,给出了中文摘要,让翻译成英文。 第1题与几何测量、材料成型、板材成型、仿真模拟、测试有关。Key words是:几何测量、板材成型、测定标准(20分) 第2题与电学、电焊接相关。加热电阻丝、电阻导致温度、温度场等。其中关键名词已经给出翻译(20分)。Key words是电阻丝、温度场、机械加工、测试第二大题是英译汉。给出3段英文,让翻译成中文 第1题是:机械工程师、机械设计所涉及的领域而被人纵所周知、涉及工程师的发明——功率消耗装置、功率产生装置:包括发动机、船舶、汽车、机械制造、自动机器人、人造器官、发电机等、芯片手机或者说是超薄手机。最后说明机械无处不在(15分) 第2题是:这题比较简单,我很快做完了:全球化的普及,该段提到产品可以在美国设计、在日本制造,在中国台湾组装,在中国大陆出售,也可以是虚拟计划在香港设计、在欧洲实行的,随着信息的爆炸,顾客对全球化产品也有了足够的了解,或者说进一步了解,占有市场、让概念深入人心才是公司赢得全球化的关键(15分) 第3题是:人类想象现在机械发展有多快、举了在美国一个科幻电影在20年后变成现实的例子。还包括开发外星球不知名的无机物给太阳系的人们使用,指出人类的想法是奇特甚至是荒缪的,但却又是现实合理的。该题还包括:有关于创 陕西省省级标准化高中名单(248所) (截至2010年11月) 西安市(74所) 西安中学西安市第八十九中学西安高级中学西安市第二十六中学西光中学西安市第一中学 西安铁三中西安铁一中 西安市第八十五中学西北大学附中 黄河中学西安市第六中学 庆安中学西北工业大学附中 西安市第三十四中学华清中学 西安市第八十三中学西飞一中 西安航天中学西安高新一中 西安交通大学附中西安市第三中学 陕西师范大学附中五环中学 西安电子科大附中长安一中 惠安中学西安远东一中 博迪中学西安田家炳中学 西安市育才中学周至中学 户县第一中学东方中学 长安二中庆华中学 西安市第三十八中学西安市第七十中学 西安市第八十二中学高陵县第一中学 西安市第三十中学 西安市航空发动机(集团)有限 公司第一子弟中学 西安市第六十六中学西安市车辆厂中学 蓝田县城关中学远东教育集团第二中学 西安市建筑科技大学附属中学西安市第八中学 阎良区关山中学西安市第四十四中学 西安市华山中学西安市第十中学 西安市四棉中学西安交通大学第二附属中学 西安市第六十四中学长安区第四中学 长安区第六中学临潼中学 户县第二中学西安铁一中国际合作学校(2009)西安交大阳光中学(2009)西安市英才中学(2009) 西安市昆仑中学(2009)户县第四中学(2009) 长安区第五中学(2009)周至县第六中学(2010) 西安市西电中学(2010)高陵县第三中学(2010) 长安大学附属中学(2010)周至县第二中学(2010) 西安市第19中学(2010)陕西师范大学锦园中学(2010)临潼区雨金中学(2010)长安区第七中学(2010) 宝鸡市(22所) 宝鸡中学宝鸡石油中学 宝鸡渭滨中学宝鸡长岭中学 凤翔中学眉县槐芽中学 扶风高中眉县中学 虢镇中学烽火中学 斗鸡中学岐山高级中学 陇县中学千阳中学 凤县中学金台高级中学 岐山县蔡家坡高级中学凤翔县西街中学 陈仓区西城高级中学(2009)岐山县益店高级中学(2009) 扶风县法门高中(2009)眉县城关中学(2009) 咸阳市(32所) 机械设计基础复习大纲 2011、4、3 第1章绪论 掌握:机器的特征:人为的实物组合、各实物间具有确定的相对运动、有机械能参与或作机械功机器的组成:驱动部分+传动部分+执行部分 了解:机器、机构、机械、常用机构、通用零件、标准件、专用零件和部件的概念 课程内容、性质、特点和任务 第2章机械设计概述 了解:与机械设计有关的一些基础理论与技术,机器的功能分析、功能原理设计,机械设计的基本要求和一般程序、机械运动系统方案设计的基本要求和一般程序、机械零件设计的基本要求和一般程序,机械设计的类型和常用的设计方法 第3章机械运动设计与分析基础知识 掌握:构件的定义(运动单元体)、分类(机架、主动件、从动件) 构件与零件(加工、制造单元体)的区别 平面运动副的定义、分类(低幅:转动副、移动副;高副:平面滚滑副) 各运动副的运动特征、几何特征、表示符号及位置 机构运动简图的画法(注意标出比例尺、主动件、机架和必要的尺寸) 机构自由度的定义(具有独立运动的数目) 平面运动副引入的约束数(低幅:引入2个约束;高副:引入1个约束) 平面机构自由度计算(F=3n-2P5-P4) 应用自由度计算公式时的注意事项(复合铰链、局部自由度、虚约束、公共约束) 机构具有确定运动的条件(机构主动件数等于机构的自由度) 速度瞬心定义(绝对速度相等的瞬时重合点) 瞬心分类:绝对瞬心(绝对速度相等且为零的瞬时重合点,位于绝对速度的垂线上) 相对瞬心(绝对速度相等但不为零的瞬时重合点,位于相对速度的垂线上)速度瞬心的数目:K=N(N-1)/2 速度瞬心的求法:观察法:转动副位于转动中心;移动副位于垂直于导轨的无穷远; 高副位于过接触点的公法线上 三心定理:互作平面平行运动的三个构件共有三个瞬心,且位于同一直线上用速度瞬心求解构件的速度(关键找到三个速度瞬心,建立同速点方程,然后求解) 了解:运动链的定义及其分类(闭式链:单环链、多环链;开式链) 运动链成为机构的条件(具有一个机架、具有足够的主动件) 机动示意图(不按比例)与机构运动简图的区别 第6章平面连杆机构 掌握:平面连杆机构组成(构件+低副;各构件互作平行平面运动)──低副机构 平面连杆的基本型式(平面四杆机构)、平面四杆机构的基本型式(铰链四杆机构) 铰链四杆机构组成(四构件+四转动副) 铰链四杆机构各构件名称(机架、连杆、连架杆、曲柄、摇杆、固定铰链、活动铰链) 铰链四杆机构的分类:曲柄摇杆机构、双曲柄机构、双摇杆机构 2010西安交大机械复试经历&复试笔试题目回忆 这些东西我曾经整理在我的QQ空间,现在贴在这里,希望能给后来人一些帮助; 仅供大家参考,希望能使大家少走点弯路 2010.03.30 晴,西安 昨天已经见过导师,签完协议,体检完成;一切告一段落,只等回去办理档案等各 种关系. 下面就简单回顾下这两天的复试过程,希望对考研后来人有所帮助! 我是从**出发,22号就到了西安. 3月23日全天、24日上午资格审查,应届生拿着你的学生证,身份证,准考证;往届生拿着身份证,准考证,还有学历学位证书;然后会贴出一些名单,安排笔试考场,还有你的复试考号;复试笔试有专业加试,英语听力和综合逻辑,考场是不一样的,一定要注意;专业课在一个考场,英语和逻辑一般在外语学院语音室进行;确认完了之后你可以先熟悉下各个考场,提前找找,免得临考前抓狂;一切安排妥当之后抽空把复试科目看看,背下 基本概念之类的。 1.初试专业课没有辅导班(我咨询了大量本校、外校考生),所以要求考生认真复习每个 知识点,都有可能考; 2.没有外校歧视,全看实力,本校复试成绩不好照样刷; 3.复试相当重要,总成绩=初试*60%+复试*40%; 4.如果复试专业课选择机械制造技术基础,整本书都要掌握,不可偷懒,因为一般7道大题,基本每章出一个,考察综合能力;(占复试成绩20%) 5.复试英语听力为六级听力(2009)或托福听力(往年),没有几个答得好,因为最后的大题听不清楚,好像声音做处理了;(占复试成绩15%) 6.复试综合能力分析,其实就是逻辑学,一定要做大量练习,因为考试时,50分钟50道题,猛地上去一做,一般做不完;(占复试成绩15%) 7.复试面试要对老师尊敬,老师对考生都很好,主要考察分析能力,并不要求一定要答的十分精准。另外,英语口语和听力要加强练习,今年有些考生一问三不知,听不明白。专业题包罗万象,知识面要广。(占复试成绩50%) 首先根据我的亲身体会,交大复试是很公平的。这次复试的各个科目的分数都是公开透明的,学术型的在前132名就是录取了。复试的笔试部分包括专业课、听力和逻辑测试,我复试选考的专业课是机械制造技术基础,考察的大都是基础的东西,题型是名词解释、简答题、分析题。绝大部分都可以在书上直接或间接找到答案的,所以书一定要背熟了啊!听力题型和英语六级听力一摸一样,难度感觉和六级差不多吧。逻辑测试我就很悲剧了,当时感觉头很木,失去逻辑了,所以做得很差,主要就是一些逻辑推断什么的,这个不用怎么准备,占的分数也很少的。笔试部分主要要把握好专业课的笔试,因为其所占比重很大。 西安交通大学附属中学分校数学分式填空选择同步单元检测(Word 版 含答案) 一、八年级数学分式填空题(难) 1.下列结论:①不论a 为何值时21a a +都有意义;②1a =-时,分式21 1 a a +-的值为0;③ 若21 1 x x +-的值为负,则x 的取值范围是1x <;④若112x x x x ++÷+有意义,则x 的取值范围是x ≠﹣2且x ≠0.其中正确的是________ 【答案】①③ 【解析】 【分析】 根据分式有意义的条件对各式进行逐一分析即可. 【详解】 ①正确.∵a 不论为何值不论a 2+2>0,∴不论a 为何值 21 a a +都有意义; ②错误.∵当a =﹣1时,a 2﹣1=1﹣1=0,此时分式无意义,∴此结论错误; ③正确.∵若21 1 x x +-的值为负,即x ﹣1<0,即x <1,∴此结论正确; ④错误,根据分式成立的意义及除数不能为0的条件可知,若 11 2x x x x ++÷+有意义,则x 的取值范围是即20010x x x x ? ?+≠? ≠??+?≠?,x ≠﹣2,x ≠0且x ≠﹣1,故此结论错误. 故答案为:①③. 【点睛】 本题考查的是分式有意义的条件,解答此题要注意④中除数不能为0,否则会造成误解. 2. 已知= =x y n 为正整数),则当=n ______时, 22101012902018x y xy +-+=. 【答案】3 【解析】 【分析】 根据分式的分母有理化把x 、y 化简,利用完全平方公式把原式变形,计算即可. 【详解】 解:()21(1)21211+-= =+-=+-+++n n x n n n n n n n , ()21(1)21211++= =++=++++-n n y n n n n n n n , 1=xy , 2222221010129020181010129020181010+-+=+-+=+x y xy x y x y 2222194019421942=+=++=+x y x xy y 2()196+=x y , 14+=x y 则()()2121212114+-+++++=n n n n n n , 解得,3n =, 故答案为3. 【点睛】 考查的是分式的化简求值、完全平方公式,掌握分式的分母有理化的一般步骤是解题的关键. 3.若关于x 的分式方程1 x a x -+=a 无解,则a 的值为____. 【答案】1或-1 【解析】 根据方程无解,可让x+1=0,求出x=-1,然后再化为整式方程可得到x-a=a (x+1),把x=-1代入即可求得-1-a=(-1+1)×a ,解答a=-1;当a=1时,代入可知方程无解. 故答案为1或-1. 4.有一个计算程序,每次运算都是把一个数先乘以 2,再除以它与 1 的和,多次重复进行这种运算的过程如下∶ 则2y =___ (用含字母 x 的代数式表示); 第 n 次的运算结果记为n y ,则n y = __(用含字母 x 和 n 的代数式表示). 【答案】 431x x + 2(21)1 n n x x -+ 【解析】 西安交大《机械设计基础》补充资料(基本概念自测题70(选 择)+30(填空)) 一、典型题解析 齿轮1输入,并推动大齿轮2绕其轴A 连续转动,又通过铰接在大齿轮2上B 处的滑块3使摆动导杆4往复摆动,并带动滑枕5往复运动以达到刨削的目的。试绘制此刨床的机构运动简图,分析其运动是否能实现设计意图,并提出修改方案。 结构错误: 1.轴端压板与轴端之间无间隙 2.端盖与轴之间无径向间隙和密封 3.轴肩过高,无法拆卸轴承 4.两个键的位置应布置在轴的同一母线上 5.齿轮无法装拆,轴环改为套筒,且要考虑右端轴承的轴向定位 轴承与轴之间不可用键联接 二、基本概念自测题(70道选择题+30道填充题) 1机器中运动的单元体称为() A,构件 B,零件 C,运动副 D,运动链 2.组成转动副的两个运动副元素的基本特征是() A,平面 B,圆柱面 C,一般曲面 D,螺旋面 3.机构的自由度数等于原动件数是机构具有()的条件 A,曲柄存在 B,定传动比 C,确定运动 D,连续传动 4.两构件组成运动副必须具备的条件是:两构件() A,相对转动或相对移动 B,都是运动副 C,相对运动恒定不变 D,直接接触且保持一定的相对运动 5.最简单的平面连杆机构是()机构 A,一杆 B,二杆 C,三杆 D,四杆 6.机构在死点位置时的() A,传动角γ=90o B,传动角γ=45o C,传动角γ=0o D,压力角α=0o 7.平面连杆机构中,从动件压力角α与机构传动角γ之间的关系是() A,α=γ B,α+γ=90o C,α+γ=0o D,α+γ=180o 8.曲柄摇杆机构中,必然出现死点位置的原动件一定是() A,最短杆 B,曲柄 C,连杆 D,摇杆 9.曲柄滑块机构共有()瞬心 A,2个 B,4个 C,6个 D,8个 10.当连杆机构无急回运动特征时,行程速比系数() A,K=0 B,K<1 C,K>1 D,K=1 11.凸轮机构中,若增大基圆半径r b,则压力角作如下变化:() A,升程压力角增大、回程压力角减小B,升程压力角减小、回程压力角增大 C,升程压力角、回程压力角均增大D,升程压力角、回程压力角均减小 12.凸轮的基圆半径是指()半径 A,凸轮转动中心至实际廓线的最小向径B,凸轮转动中心至理论廓线的最小向径C,凸轮理论廓线的最小曲率D,从动件静止位置凸轮廓线的最小曲率 13.齿轮机构的基本参数中,与重合度无关的参数是() A,齿数 B,模数 C,压力角 D,齿顶高系数 14.一对标准直齿圆柱齿轮传动的轮齿在啮合过程中,啮合角α’的值()A,由小逐渐变到大B,由大逐渐变到小C,由大逐渐变到零再变到大D,始终保持不变15.一对渐开线齿轮在啮合传动过程中,从动轮齿廓上的压力角α的值() A,由小逐渐变到大B,由大逐渐变到小C,由大逐渐变到零再变到大D,始终保持不变16.一对渐开线标准直齿圆柱齿轮在安装时,其中心距不等于标准中心距,则参数()有变化 A,压力角α B,传动比i C,基圆半径r b D,啮合角α’和重合度ε 17.两轴线交角为90o的直齿圆锥齿轮减速传动,其传动比i等于() A,ctgδ1或z2/z1 B,ctgδ2或z2/z1 C,ctgδ1或d1/d2 D,tgδ1或ctgδ2 18.能将往复摆动转换为单向间歇转动的机构是() A,槽轮机构 B,棘轮机构 C,曲柄摇杆机构 D,不完全齿轮机构 19.动平衡的条件是:回转件各偏心质量产生的离心惯性力的() A,合力为零 B,合力偶矩为零 C,合力和合力偶矩均为零 D,合力和合力偶矩均不为零 20.机械中加装飞轮的主要目的是为了调节() A,质心位置以使其平衡 B,轴的一阶临界转速 C,周期性速度波动 D,非周期性速度波动 21.在相同工作条件下,V带传动比平带传动的() A,传动能力大,但传动效率低B,传动能力小,但传动效率高 C,传动能力大,且传动效率高D,传动能力小,且传动效率低 22.整体打滑和弹性滑动在带传动正常工作时() A,两者都不可避免B,前者不可避免,后者必须避免 C,两者都可以避免D,前者必须避免,后者不可避免 23.带传动在空载条件下运转时,紧边拉力F1与松边拉力F2的关系是() A,F1/F2≈0 B,F1/F2≈e 1 αf C,1 第一档次 清华大学浙江大学上海交通大学西安交通大学 第二档次 华中科技大学哈尔滨工业大学同济大学东南大学吉林大学 第三档次 北京航空航天大学北京理工大学大连理工大学天津大学华南理工大 学 第四档次 重庆大学湖南大学东北大学西北工业大学中南大学山东大学电子科技大 学 第五档次 燕山大学上海大学厦门大学四川大学西安电子科技大学合肥工业大学哈尔滨工程大学武汉理工大学武汉大学中国科技大学 第六档次 江苏大学南京航空航天大学南京理工大学西南交通大学北京交通大学 北京工业大学广东工业大学北京科技大学中国矿业大学华东理工大学 北京邮电大学 第七档次 西安理工大学南昌大学中国石油大学太原理工大学苏州大学武汉科技大学北京化工大学浙江工业大学郑州大学大连海事大学河北工业大学东华 大学 西安建筑科技大学上海理工大学河海大学深圳大学中国农业大学北京林 业大学 第八档次 中国民航大学山东科技大学桂林电子科技大学大连交通大学浙江理工大学长春理工大学宁波大学哈尔滨理工大学杭州电子科技大学 沈阳工业大学河南科技大学广西大学上海海事大学中北大学长安大学华北电力大学汕头大学中国海洋大学华南农业大学 第九档次 兰州交通大学兰州理工大学长沙理工大学重庆邮电大学西安工程大学昆明理工大学内蒙古科技大学陕西科技大学沈阳理工大学长春工业大学北方工业大学天津工业大学西安科技大学北京服装学院湘潭大学 南京工业大学 第十档次 辽宁工程技术大学西华大学山东轻工业学院贵州大学湖南科技大学江苏 科技大学 武汉科技学院太原科技大学安徽工业大学西安石油大学 武汉工业学院青岛科技大学 排名一:参考资料:2007-2009教育部一级学科评估 10248 上海交通大学1 95 10487 华中科技大学2 92 10698 西安交通大学3 91 10003 清华大学4 90 10213 哈尔滨工业大学 10335 浙江大学6 89 10007 北京理工大学7 84 10006 北京航空航天大学8 81 10611 重庆大学9 80 10141 大连理工大学10 79 10532 湖南大学 10183 吉林大学12 78 10287 南京航空航天大学 2020-2021西安交通大学附属中学航天学校初三数学上期中模拟试题(含答案) 一、选择题 1.若二次函数2y x bx =+的图象的对称轴是经过点(2,0)且平行于y 轴的直线,则关于x 的方程25x bx +=的解为( ). A .10x =,24x = B .11x =,25x = C .11x =,25x =- D .11x =-,25x = 2.如图,BC 是半圆O 的直径,D ,E 是?BC 上两点,连接BD ,CE 并延长交于点A ,连接OD ,OE ,如果40DOE ∠=?,那么A ∠的度数为( ) A .35° B .40° C .60° D .70° 3.如图在平面直角坐标系中,将△ABO 绕点A 顺时针旋转到△AB 1C 1的位置,点B 、O 分别落在点B 1、C 1处,点B 1在x 轴上,再将△AB 1C 1绕点B 1顺时针旋转到△A 1B 1C 2的位置,点C 2在x 轴上,将△A 1B 1C 2绕点C 2顺时针旋转到△A 2B 2C 2的位置,点A 2在x 轴上,依次进行下去…若点A (32 ,0),B (0,2),则点B 2018的坐标为( ) A .(6048,0) B .(6054,0) C .(6048,2) D .(6054,2) 4.在平面直角坐标系中,二次函数y=x 2+2x ﹣3的图象如图所示,点A (x 1,y 1),B (x 2,y 2)是该二次函数图象上的两点,其中﹣3≤x 1<x 2≤0,则下列结论正确的是( ) A .y 1<y 2 B .y 1>y 2 C .y 的最小值是﹣3 D .y 的最小值是﹣4 5.如果关于x 的方程240x x m -+=有两个不相等的实数根,那么在下列数值中,m 可以取的是( ) A .3 B .5 C .6 D .8 6.已知实数0a <,则下列事件是随机事件的是( ) A .0a ≥ B .10a +> C .10a -< D .210a +< 西南交通大学机械原理试题 西南交通大学2003年硕士研究生招生入学考试 机械原理试题 考试时间:2003年1月考生请注意: 1.本试题共七题,共3页,考生请认真检查; 2.答题时,直接将答题内容写在指定的答卷纸上。 一、(16分)计算图示平面机构的自由度,如果有复合铰链、局部自 由度和虚约束请予以指出。 (a) (b) 二、 (24分)渐开线直齿圆柱齿轮传动,齿轮的基本参数如下表所示 1.推证其瞬时传动比为1 2 12z z i ,其中12,z z 分别为齿轮2,1的齿数; 2.说明这对齿轮是否存在根切现象? 3.这对齿轮的标准中心距和正确安装中心距分别是多少? 4.分析是否可以通过增大这对齿轮传动的模数来提高其重合度。 三、 (15分)图示机构,图中比例尺为 m mm /002.0,构件2为运动输入构件,构件7为运动输出构件。 1.说出机构中所含基本机构的名称,并说明各个基本机构是由哪些构件组成的; 2.分析该机构运动变换的功能,即:能将原动件2的什么样的运动转变为构件7什么样的运动输出; 3.设计另外一个机构,实现与图示机构相同的运动变换功能,并画出所设计机构的示意图。 四、 (27分)如图所示, 1.设计一个机构能够实现当滑块A 在力P 的作用下向右运动时, 滑块B 能够克服作用于其上的工作阻力Q 向上运动; 2.分析当滑块A 在任意位置时,以力P 为主 动力,所设计机构各个运动副反力的方向(不考虑重力、惯性力等,并设所有移动副、螺旋副、高副的摩擦角均为V ?,所有转动副的摩擦圆半径为V ρ); 3.分析在以力P 为主动力时,所设计机构的自锁条件。 五、 (27 分)图示轮系中,已知各齿轮的齿数 ,17 ,40 ,17321===z z z 60 ,80'44==z z ,505=z 60 ,1,65,557'66'5====z z z z min 300031r n n ==,转向如图所示。 1.试确定出蜗轮7的转速和转向; 2.若齿轮5,4’,5’,6 均为标准渐开线直齿圆柱齿轮,模数为3mm, 且为标注安装。问图中轴心线Ⅱ、Ⅳ之间的距离h 应为多少? 3.设轮系中所有齿轮的 质心与其几何中心(也就是转动轴心)重合,齿轮1及其转 动轴上零件对轴Ⅰ的转动惯量212.0kgm J =, 齿轮2及其转动轴上零件对轴Ⅱ的转动惯量228.0kgm J =,齿轮3及其转动轴上零件对轴Ⅲ的转动惯量2305.0kgm J =,齿轮4-4’ 及其转动轴上零件对轴Ⅱ的转动惯量246.0kgm J =, 齿轮5-5’的质量为20kg ,齿轮5-5’ 及其转动轴上零件对轴Ⅳ转动惯 量 一、选择题 1.如图,下面是由一些相同的小正方体构成的立体图形的三视图,这些相同的正方体的个数是() A.6 B.7 C.8 D.9 2.下图是一些完全相同的小立方块搭成的几何体的三视图,那么搭成这个几何体所用的小立方块的最多个数是() A.9 B.8 C.7 D.6 3.下列说法错误的是() A.高矮不同的两个人在同一盏路灯下同一时刻的影子有可能一样长 B.对角线互相垂直的四边形是菱形 C.方程x2=x的根是x1=0,x2=1 D.对角线相等的平行四边形是矩形 4.下列各立体图形中,自己的三个视图都全等的图形有()个 ①正方体;②球;③圆柱;④圆锥;⑤正六棱柱. A.1个B.2个C.3个D.4个 5.如图,把一个棱长为3的正方体的每个面等分成9个小正方形,然后沿每个面正中心的一个正方形向里挖空(相当于挖去7个小正方体),所得到的几何体的表面积是() A.78 B.72 C.54 D.48 6.如图,该几何体的俯视图是() A.B.C.D. 7.如图是由6个同样大小的正方体摆成的几何体.将正方体①移走后,所得几何体() A.主视图改变,左视图改变B.俯视图不变,左视图不变 C.俯视图改变,左视图改变D.主视图改变,左视图不变 8.下列四个几何体中,主视图是三角形的是() A.B.C.D. 9.小阳和小明两人从远处沿直线走到路灯下,他们规定:小阳在前,小明在后,两人之间的距离始终与小阳的影长相等.在这种情况下,他们两人之间的距离() A.始终不变B.越来越远C.时近时远D.越来越近 10.如图所示是某几何体从三个方向看到的图形,则这个几何体是() A.三棱锥B.圆柱C.球D.圆锥 11.如图,水杯的俯视图是() A.B.C.D. 12.下面四个立体图形,从正面、左面、上面对空都不可能看到长方形的是() A.B.C.D. 二、填空题 13.如图所示,是由一些相同的小立方体搭成的几何体分别从正面、左面、上面看到的该几何体的形状图,那么构成这个立体图形的小正方形有________个. 机械原理习题解答 例4-1 绘制图4-2所示液压泵机构的机构运动简图。 解:该机构由机架1、原动件2和从动件3、4组成,共4个构件,属于平面四杆机构。 机构中构件1、2,构件2、3,构件4、1之间的相对运动为转动,即两构件间形成转动副,转动副中心分别位于A 、B 、C 点处;构件3、4之间的相对运动为移动,即两构件间形成移动副,移动副导路方向与构件3的中心线平行。构件1的运动尺寸为A 、C 两点间距离,构件2的运动尺寸为A 、B 两点之间的距离,构件3从B 点出发,沿移动副导路方向与构件4在C 点形成移动副,构件4同时又在C 点与构件1形成转动副。 选择与各构件运动平面平行的平面作为绘制机构运动简图的视图平面。 选择比例尺l μ=0.001m/mm ,分别量出各构件的运动尺寸,绘出机构运动简图,并标明原动件及其转动方向,如图4-2所示。 例4-2 绘制图4-3所示简易冲床的机构运动简图。 解:图示机构中已标明原动件,构件6为机架,其余构件为从动件。需要注意的是,在区分构件时应正确判断图中各构件都包括哪些部分,例如:构件3就包括两部分,如图所示。 该机构中构件1与机架以转动副连接,转动副中心位于固定轴的几何中心A 点处;构件2除与构件1形成回转中心位于C 点的转动副外,又与构件3形成移动副,移动副导路沿BC 方向;构件3也绕固定轴上一点B 转动,即构件3与机架形成的转动副位于B 点, 同时 图4-3 简易冲床机构l μ=0.001m/mm 构件3与构件2形成移动副,又与构件4形成中心位于D 点的转动副;构件4与构件5形成中心位于E 点的转动副;构件5与机架6形成沿垂直方向的移动副。 该机构属于平面机构,因此选择与各构件运动平面平行的平面作为绘制机构运动简图的视图平面。 选择比例尺l μ=0.001m/mm ,量出各构件的运动尺寸,绘出机构运动简图,并标明原动件及其转动方向,如图4-3所示。 4-3 题4-3图为外科手术用剪刀。其中弹簧的作用是保持剪刀口张开,并且便于医生单手操作。忽略弹簧,并以构件1为机架,分析机构的工作原理,画出机构的示意图,写出机构的关联矩阵和邻接矩阵,并说明机构的类型。 解:若以构件1为机架,则该手术用剪刀由机架1、原动件2、从动件3、4组成,共4个构件。属于平面四杆机构。 当用手握住剪刀,即构件1(固定钳口)不动时,驱动构件2,使构件2绕构件1转动的同时,通过构件3带动构件4(活动钳口)也沿构件1(固定钳口)上下移动,从而使剪刀的刀口张开或闭合。其机构示意图和机构拓扑图如上图所示。 其关联矩阵为: 邻接矩阵为: 11 011000111 0014 32 1 4321 v v v v e e e e L M =; 0 1 1 1010 010110104 321 4321v v v v v v v v A M =; 例4-4 计算图4-13所示压榨机机构的自由度。 题4-3图 4 e 2 e 1e 4 v 3 v 1 v 2 v 3 e 机构的拓扑图 1 工业设计 一、培养目标 本专业培养具有扎实的工业设计学科基础理论,掌握工业设计的程序和方法,具备工业设计心理学、设计调查、可持续设计、材料与工艺技术等专业基础知识与技能,具备产品设计、人机界面设计、图文设计、结构设计、模具设计等多种能力,能够从事科学研究、产品规划、概念设计、以及技术管理等方面工作的,具有国际视野和社会责任感,善良、有爱心、有长远眼光、有创新精神和实践能力的高级工程技术人才。 二、主干学科与相关学科 主干学科:工业设计 相关学科:计算机科学与技术、设计艺术学、机械工程、环境工程、哲学、心理学。 三、专业主干课程 工程制图、计算机辅助工业设计、工业社会学、工业设计思想基础、符号学基础、人机学、工业设计心理学基础。 四、主要实践环节 社会实践、企业实习、设计实践、设计调查、工程训练、工程实习、电工电子课程设计、专业实习、毕业设计、军事训练。 五、学制与学位 学制四年,工学学士学位。 六、毕业条件 最低完成170学分(课内),及8学分(课外)。其中必修120学分,选修16学分,集中实践34学分,课外实践8学分。并且军事训练考核合格,通过全国英语四级考试,通过《国家学生体质健康标准》测试,方可获得毕业证和学位证。 七、选课说明与要求 1、课程设置表中各模块选修课要求 (1)基础通识类选修课任选6学分,基础通识类核心课限选6学分,共计12学分; (2)思想政治教育、国防教育必修16学分; (3)体育、英语、计算机技术基础类限选15学分; (4)基础科学类必选28.5学分; (5)专业主干课必选38学分; (6)专业课程最低必选26.5学分,其余为任选课程。 2、基础通识类核心课程选课要求 建议选择:健康与疾病、中国哲学经典著作导读、中西文化比较、信息技术与社会进步、欧洲文明的现代历程、生命的起源与生物进化、社会学概论。 3、集中实践的说明与要求 本专业要求学生每学年的寒暑假合起来在企业实习8周以上。这样4年中,学生将有9个月以上的实习时间。 (1)工业设计实践 工业设计实践10个学分,分7个学期完成(1、2、6、7学期各完成1学分,3、4、5学期各完成2学分)。 每次寒假实习设为工业设计实践1学分,由系按实习要求进行考核,合格者可获得学分。一年级实习的主要目的是详细了解企业现状和产品生产工艺,要求当生产工人;二年级、三年级实习的主要目的是掌握结构设计、模具设计和外观设计,要求从事一定技术工作。实习期间要求学生做企业调查、行业调查、社会调查。 寒假实习要求:①学生自己联系实习单位;②每年寒假实习时间不少于3周;③主动参与各种技术工作和设计工作;④写实习日记:记录每天实习内容、学习收获和所发现的问题;⑤实习结束后,必须由该实习单位出具书面实习鉴定,由鉴定人签名并加盖公章;⑥开学后答辩。 每学期学生除完成规定课程,以及课程内设计项目外,必须在课外时间参与实际设计项目。完成1项真实设计项目设为设计实践1学分,参加设计比赛获奖设为设计实践1学分。由系根据设计项目难易程度以及完成设计的完整性进行考核,合格者可获得学分。 (2)专业实习 专业实习要求设计企业产品,安排在第6学期暑假进行。最基本的实习目的是动手学习各种加工工艺,能够按照车间技术员(或工艺员)的工作要求绘制零件图和装配图、安排车间工艺、检验产品质量、仔细了解塑料件模具或钣金件模具设计制造过程。对企业管理和行业状况进行社会学调查。实习结束后,学生提交实习日记、实习报告、企业实习鉴定,由系负责组织考核。 (3)工程训练 工程训练主要是指工程坊开设的金工实习、电工实习和测控实习,是全校学生必须经过的实践环节。其目的是为了培养学生的工程意识,锻炼学生动手能力,掌握基本实践技能。由工程坊负责安排具体内容并进行考核。金工实习和电工实习安排在一年级,测控实习安排在二年级。 (4)毕业设计 毕业设计中包含3个月的毕业实习。毕业实习不是简单的重复性劳动,而是大学里的一次综合性学习,主要目的是学会独立承担一个产品完整的设计与制造过程。毕业实习要求学生在第7学期 西安交通大学附属中学书面表达英语作文汇编中考英语专项训练含答案解析 一、中考英语书面表达汇编 1.(·北京中考模拟)从下面两个题目中任选一题 ....,根据中文和英文提示,完成一篇不少 于50词的文段写作。文中已给出内容不计入总词数。所给提示词语仅供选用。请不要写出你的校名和姓名。 题目① 假如你是李华,本周六龙湖公园将举办端午节游园活动。你打算邀请你们班交换生Peter 和你一起参加,请用英语写一封电子邮件,告诉他你们见面的时间、地点,在那儿可以做些什么以及他需要做什么准备。 提示词语: meet, take par t in, the dragon boat race, make Zongzi, camera… 提示问题: When and where are you going to meet? What can you do there? What do you advise Peter to prepare? Dear Peter, How is it going? This Saturday is the Dragon Boat Festival. There will be a lot of interesting activities in Longhu Park. I’m writing to invite you to go there with me. __________________________________________________________________________ __________________________________________________________________________ __________________________________________________________________________ __________________________________________________________________________ __________________________________________________________________________ I’m looking forward to your early reply. Yours, Li Hua 题目② “我们都在努力奔跑, 我们都是追梦人。”有梦想就有目标, 有希冀才会奋斗。某英文网站正 在开展以“We Are All Dreamers”为主题的征文活动, 假如你是李华,请用英语写一篇短文投稿。谈谈你的梦想是什么?你为什么会有这样的梦想?为了实现你的梦想, 你打算怎么做?提示词语:want to be, like, study hard, come true... 提示问题:● What's your dream and why? ● What will you do to make your d ream come true? 【答案】例文:Dear peter, How is it going? This Saturday is the Dragon Boat Festival. There will be a lot of interesting activities inLonghu Park. I’m writing to invite you to go there with me. We are going to meet at the south gate of Longhu Park at 9 o’clock. We can watch the dragon boat race. It’s very exciting. After that, we will learn how to make Zongzi. I think you will be interested in it. By the way, you can take a camera or your 往复式压缩机原理与结构复习提纲 1从原理、结构、用途上如何划分压缩机? 2为什么要定义级的理论循环?级的理论循环是如何定义、抽象的?说明在研究分析压缩机时理论循环的意义。 3级的实际循环与理论循环的差别是什么,为什么会有这些差别? 4压缩机实际循环指示图。 5进气系数的意义是什么?在指示图中如何表示?理想气体的容积系数、压力系数关系式。 6分析影响实际循环指示功的诸因素。 7为什么要多级压缩?如何确定级数和各级压力比? 8容积流量的定义。 9排气系数的意义和作用;泄漏系数、析水系数、净化系数的含义。 10排气压力是如何建立的?什么是额定排气压力和实际排气压力。 11为什么要控制排气温度?如何控制? 12熟悉压缩机的指示功率、轴功率、等温效率、绝热效率等概念,理解效率的本质是反映特指方面的损失。 13了解排气量调节的方式及各种方法的优缺点。 14多级压缩时,第一级排气量变化后,进排气压力不变时,各级压力比如何变化。(能定量分析) 15多级压缩时,进排气压力变化后,各级压力比如何变化。(能定量分析)16多级压缩时,某一级气量变化时,各级压比变化(定性分析) 17熟练推导曲轴连杆活塞式压缩机中惯性力(往复、旋转) 18熟悉气体力、摩擦力(往复、旋转)的计算 19能根据活塞力计算连杆力、切向力、法向力 20能推导典型往复压缩机结构的惯性力、力矩平衡情况(对动式、对置式、V 型、W型) 21能知道典型往复压缩机结构的切向力均匀性(对动式、对置式、V型、W型)22知道切向力曲线时,知道计算飞轮矩的方法 23往复式压缩机各种结构方案的优缺点(卧室、立式;V型和L型;M型、H 型) 24能根据气量和压力,设计选取压缩机的级数、列数,选取合适的结构形式,并绘制相应的简图。 25能根据压缩机的结构形式,设计合理的气缸冷却方式和结构气缸的冷却方式有哪些,各种方式的特点与优缺点,如何选用;各种冷却方式对压缩机设计有何影响;冷却器的结构、类型、特点,在压缩机系统中如何选用,西安交通大学附属中学数学分式填空选择专题练习(解析版)
西交大 机械考博 经验
陕西省重点中学名单
西安交大《机械设计基础》课后习题答案综合版..
2010西安交大机械复试经历&复试笔试题目回忆
西安交通大学附属中学分校数学分式填空选择同步单元检测(Word版 含答案)
西安交通大学 考研 机械设计基础 100题 整理打印版
考研机械专业院校排名
2020-2021西安交通大学附属中学航天学校初三数学上期中模拟试题(含答案)
西南交通大学机械原理试题
西安交通大学附属中学航天学校九年级数学下册第四单元《投影与视图》测试卷(包含答案解析)
西南交大《机械原理》习题解
工业设计-西安交通大学机械学院
西安交通大学附属中学书面表达英语作文汇编中考英语专项训练含答案解析
西安交通大学 往复式压缩机原理与结构复习提纲 期末考试
相关主题
文本预览