
异步电动机直接转矩控制基本原理
从1985年德国鲁尔大学德彭布洛克(Depenbrock )教授首次提出直接转矩控制理论以来,短短十几年时间,直接转矩控制理论以它简明的系统结构,优良的静、动态性能得到迅猛发展和应用。
1 异步电动机的数学模型
异步电机数学模型是一个高阶、强耦合、多变量、非线性系统。理想状态下(一般这样假设)电机三相(定、转子)均对称,定、转子表面光滑,无齿槽效应,电机气隙磁势在空间正弦分布,铁心涡流、饱和及磁滞损耗不计。在固定坐标系下(α,β,0),用异步电机转子的量来表示异步电机数学模型(则有r u α=
r u β=0)。基本方程如下:
????
??????????????????
??
?????
?
+--+++=????????????r r s s r r r
m
m r r r m
m m s
s m s s s s i i i i L R L L L
L L R L L L L R L L R u u βαβαβαωωωω..
.
..
.
.
.
000
000 (1) )()(r s r s m p s s s s p e i i i i L n i i n T βααβαββαψψ-=-= (2)
p
e p n F TL T dt n Jd ω
ω--= (3) s R 、s L :定子电阻和自感
r R 、r L :转子电阻和自感 m L :定子互感
ω:电机转子角速度,即机械角速度
s u α 、s u β:定子电压(α、β)分量 s i α 、s i β:定子电流(α、β)分量
r u α、r u β:转子电压(α、β)分量 r i α、r i β:转子电压(α、β)分量
J ,F 分别为机械转动惯量和机械磨擦系数
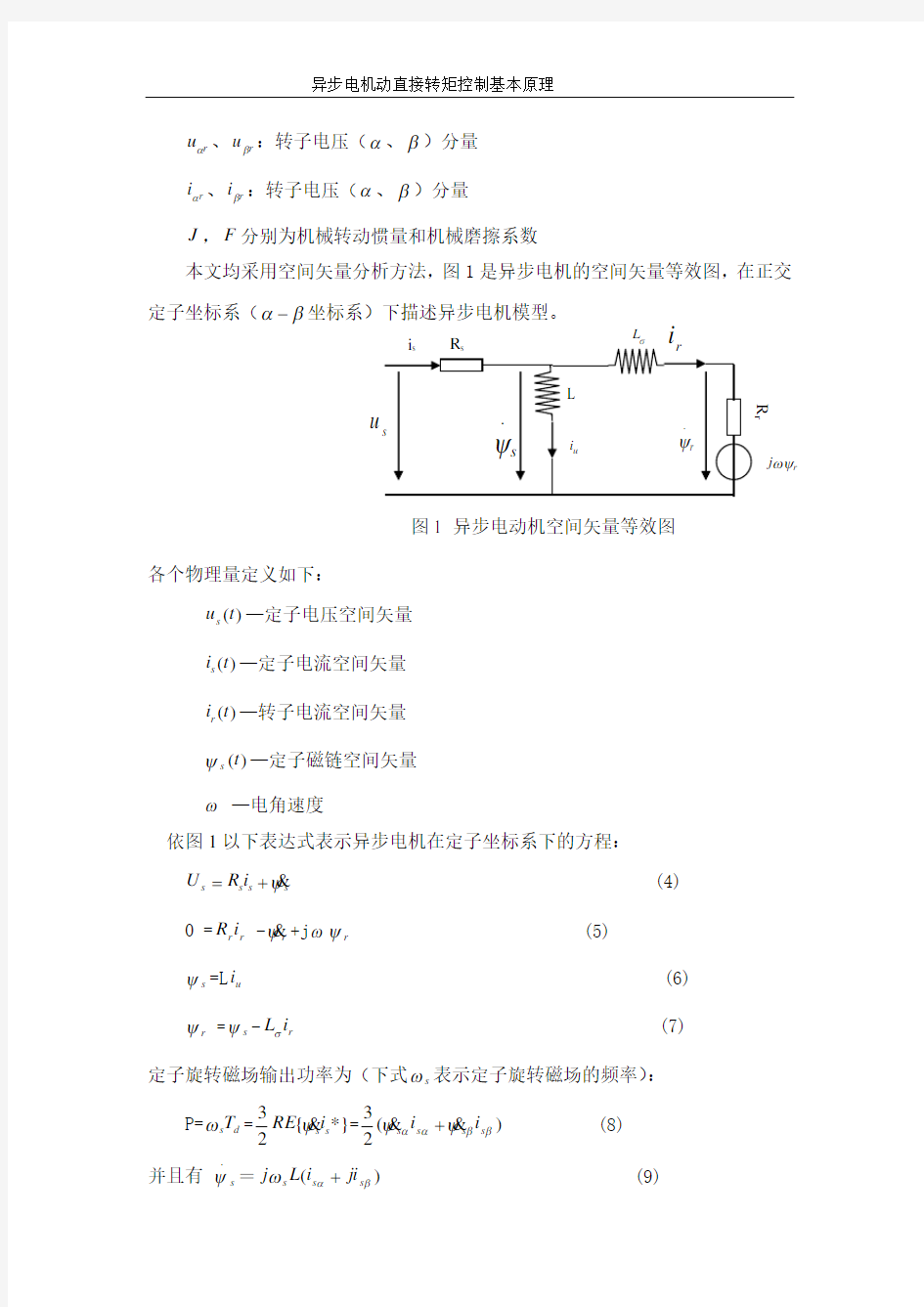
本文均采用空间矢量分析方法,图1是异步电机的空间矢量等效图,在正交定子坐标系(βα-
各个物理量定义如下:
)(t u s —定子电压空间矢量
)(t i s —定子电流空间矢量
)(t i r —转子电流空间矢量
)(t s ψ—定子磁链空间矢量 ω —电角速度
依图1以下表达式表示异步电机在定子坐标系下的方程:
s s s s i R U ψ&+= (4)
0 =r r i R -r ψ&+j ωr ψ
(5)
s ψ=L u i (6)
r ψ =s ψ-r i L σ (7) 定子旋转磁场输出功率为(下式s ω表示定子旋转磁场的频率):
P=d s T ω=
*}{2
3s s i RE ψ&=)(23
ββααψψs s s s i i &&+ (8) 并且有 s .
ψ=)(βαωs s s ji i L j + (9)
把表达式(9)分解到(βα-)坐标下得:
ββαψωωψs s s s s Li -=-=.
(10) ααβψωωψs s s s s Li -=-=.
(11) 把式(10)和式(11)代入式(8)得转矩表达式:
)(2
3
αββαψψs s s s d i i T -=
(12) 从图1可得:
r u s i i i +=,结合式(6)、式(7)得:
)(2
3
1βααβσψψψr s r s d i L T -=
(13) 上式也可以表示成(θ为磁通角,即定子磁链与转子磁链之间的夹角):
θψψσsin 2
3
1r s d L T =
(14) 定子磁链的幅值根据式(4)由定子电压积分来计算的,而转子磁链幅值由负载决定的,它根据式(5)由转子电流决定,而稳态转矩据式(14)则通过计算磁通角来实现。
2 电压型逆变器的模型
逆变器是直接转矩伺服驱动器中的重要部分,本系统采用的是电压型逆变器。如图2,每个桥臂各有上、下两个开关管(a S 、b S 、c S 、-a S 、-b S 、-
c S ),
一个闭合。其中a S
与-
a S ,
b S 与-
b S
c S 与-
c S 均互为反向,也即一个导
通而另一个断开。a 、b 、c 表示异 步电机的三相。逆变器总共有8种
开关状态,如表1:
表1 逆变器8种开关状态
从表1可以看出,开关状态0、7属于同一状态,其相当于把电机三相A 、B 、C 同时接到同一电位上,这两种状态称为零状态;而另外状态1~6则称为工作状态。所以实际上电压逆变器共有7种不同状态。由图2可知,当电压型逆变器在没有零电平输出时它的六种工作状态的电压波形、电压幅度和开关状态的对应关系如图3,图中1s u 、2s u 、3s u 、4s u 、5s u 、6s u 分别对应状态(011)、(001)、(101)、(100)、(110)、(010)。
a u b
u c
u
S (t u s 图2-3 工作状态三相电压波形
把逆变器的输出电压用空间矢量来表示,电压空间顺序见图4。)(t u t 表示电压矢量,则7有个离散的电压空间矢 量。每个工作电压空间矢量在空间位置 相差60°,矢量以逆时针顺序旋转,即顺序为1s u →2s u →3s u →4s u →5s u →6s u 。其中六边形的中心是零电压矢量。 对异步电机三相分析,将三维矢 量转化为二维矢量,在这用Park 变换。将异步电机三相定子坐标 系的α轴与Park 矢量复平面的实 轴α重合,则三相物理量)(t X a 、
)(t X b 、)(t X c 的Park 矢量)(t X 为:
)(t X =3
2[)(t X a +ρ)(t X b +2ρ)(t X c ] (15)
其中ρ=?
120j e
。
由图 2的接法,其输出电压空间矢量)(t u s 的Park 矢量变换表达式为:
)(t u s =3
2[a u +3/2πj b e u +3/4πj c e u ] (16)
a u 、
b u 、
c u 分别是a 、b 、c 三相定子负载绕组的相电压。依图3给出的a u 、b u 、c u 并代入式(16)可以计算出从1~6各个状态输出的电压空间矢量)(t u s 。
直接转矩控制是根据定子磁链s ψ,转矩e T 的要求,从1~7状态中选出一个最佳控制矢量使电机运行在特定的状态。
3磁链控制
磁链控制的任务是识别磁链的运动轨迹的区段或位置,给出正确的磁链开关信号,以产生相应的电压空间矢量,控制六边形轨迹或圆形轨迹正确地旋转。
1s 2s )
1013s 010(6s u 图2-4 六边形电压空间矢量
3.1 磁链轨迹的控制
由式(4)可得:
?-=dt R t i t u t s s s s ))()(()(ψ (17)
如果忽略s R 则式(17)可表示成
dt t u t s s )()(?≈ψ (18)
由式(18)可以看出电机定子磁链s ψ的运动方向是依)(t u s 方向进行的。当电压逆变器开关状态不发生变化时,定子电压矢量不变,此时电机采用非零空间电压矢量,则s ψ的运行方向与幅值将发生变化;但当采用零电压矢量时s ψ的运行将受到抑制。按照状态1s u →5s u →4s u →6s u →2s u →3s u 顺序运行一周后,将形成一个六边形磁链轨迹,如图4。而合适地施加非零矢量顺序和合理的作用时间比例,可以形成一个多边形磁链轨迹,以致近似圆形轨迹。把(βα-)复平面分成6个区域,如图5,
6
)12()(6)32(π
φπ-<
≤-N N N N =1,2,3,4,5,6 (19) 假设测得的定子磁链为s ψ,给定磁链为sref ψ, 将s ψ与sref ψ之间的偏差进行滞后比较,当误差 不在所允许的范围之内时就进行电压切换,以 减小误差。实现这种功能的环节称为磁链调节器,
实际上它是一个施密特触发器。图6为磁链 调节器的功能图。图中ψY 为磁链调节器的输出,
ψσ为磁链误差带宽。 当 sref ψ-s ψ≥
2
ψ
σ 时,磁链调节器输 出ψY =1,即选择电压矢量使s ψ增加。
当 2
ψ
σψψ<
-s sref 时,磁链调节器输出ψY 不变。
当sref ψ-s ψ≤-
2
ψ
σ 时,磁链调节器输出ψY =0,即选择电压矢量使s ψ减少。 根据以上的控制方法可以使磁链幅值在给定的范围内变化,s ψ轨迹接近圆形。
3.2 磁链轨迹区段的确定
在直接转矩控制中,为了能够选取合适的电压空间矢量,必须确定磁链所在区段的具体位置。只有这样才能结合磁链与转矩开关信号给出当前所需要接通的电压矢量。
1. 六边形磁链轨迹区段的确定
2.3.1节指出电机定子磁链s ψ的运动方向是依)(t u s 方向进行,六种工作状态电压形成磁链轨迹六个边。将定子磁链分解成三相(如图7):
定子磁链三相分量为a βψ、b βψ、c βψ。a βψ、b βψ、c βψ通过施密特触发器得磁链开关信号a S ψ、b S ψ、c S ψ,这三个磁链信号与电压开关信号关系为: a S ψ=c SU ;b S ψ=a SU ;c S ψ=b SU ,
其中a SU 、b SU 、c SU 是开关信号a SU 、α
图8 (βα-)坐标下 圆形磁链轨迹区域图
α
b
β
b SU 、
c SU 的反相。定子磁链与六边形区段对应关系如表2:
表2 定子磁链与六边形区段对应关系表
2. 圆形磁链轨迹区段的确定
圆形磁链轨迹磁链幅为:2
2
βαψψψs s += ,αψs ,βψs 为定子磁链在(坐标βα-)下的投影。如图8将圆形轨迹分成六个区域,根据αψs ,βψs 的正负值可以确定磁链轨迹在哪个区域中。;例如在第一象限,θ=30°,在ab 弧θ≤30°,而在bc 弧段θ≥30°。通过这种方式可以确定磁链在圆形轨迹的任何一个区域。
4转矩控制
从式(14)可知,异步电机的转矩由定、转子磁链的幅值、磁通角θ决定的。而转子磁链幅值由负载决定的。为了充分利用电机铁芯,保持定子磁链为恒量。改变转矩可以通过磁通角来实现,即通过改变电压空间矢量)(t u s 来控制定子磁链旋转速度,使其走走停停,以达到改变定子磁链的平均速度s ?,从而实现改变磁通角θ,最后达到控制转矩的目的。这个过程可以用图9来解释。1t 时刻定子与转子磁链分别为)(1t s ψ、
)(1t r ψ,磁通角为)(1t θ,从1t 运 行到2t 时刻,此时对定子所加的 电压空间矢量)(t u s 为)101(3s u , 定子磁链从位置)(1t s ψ到位置
)(2t s ψ所运行的轨迹为s ψ?, 轨迹方向与)101(3s u 所指的方向
一致,而且沿着3S 。由式子:0=
r R
直接跟随超前于它的定子磁链,实际上在此运行期间转子磁链变化位置受到定子平均频率s ω的影响。综上所述,在1t 时刻到2t 时刻期间,定子磁链旋转速度大于转子旋转速度;磁通角)(t θ(即磁通角由)(1t θ到)(2t θ的夹角)增大,相应地,根据式(14)转矩也增大。而如果在2t 时刻引入零电压空间矢量,此时定子磁链
)(2t s ψ则保持在2t 时刻位置不动,而转子磁链空间矢量则继续以s ω速度向前运行,必然的,磁通角减小,即转矩减小。转矩控制实际上是通过两点式调节来选择电压空间矢量,使其交替于电压空间矢量的工作状态和零状态,由此来控制空间矢量的平均角速度s ω的大小。两点式调节实际上就是一个转矩调节器,其工作过程如下:
由于对任何电机来说,从转矩到转速均为一个积分时间常数s T ,s T 由电机
和机械惯性决定而不受控的积分环节。转矩变化率dt
dT e 近似与瞬时滑差s .θ成正
比(当定子磁链s ψ为常数)。在直接转矩控制中采用滞后调节器对转矩进行控制,通过选择合理电压空间矢量,以产生期望的s .
θ来控制转矩。转矩与滑差的关系式如下:
dt
dT e
0|=t =)}|Im(.)]|Re(.{[0000==--t s r s t d r s i R i l I L l I L θ (20)
上式中:s m s r L L L L l )
(2
-=,Im 、Re 分别表示取虚、实部;0I 表示定子磁化电流
矢量幅值;根据定子磁链s ψ旋转的方向,转矩调节器可以分成两个调节环节。当s ψ顺时针旋转时:0≤-≤?-e ref T T T ;当s ψ逆时针旋转时:
T T T e ref ?-≤-≤0。如图10,ref T 表示转矩给定值,T ?表示转矩误差带宽,out
T 表示转矩调节器输出。从图10可以看出当out T =1或-1时,根据s ψ需要所选的电压矢量可以获得转矩;当out T =0
通过以上所述瞬态调节就可
以达到较高的转矩动态特性。
5 直接转矩的开关矢量表
将上述磁链调节器与转矩调节器结合起来,共同控制逆变器开关状态,这样既能保证磁链在限定范围内,也能使电机的输出转矩快速跟随给定转矩,从而保证系统有很高的动态特性。开关状态表如表3:
表3 开关状态表
6 直接转矩控制的基本结构
直接转矩控制基本结构原理图如图11,以下分别介绍各个部分。
1.坐标变换单元(UCT ),它将定子磁链αψ、βψ(βα-坐标系下)转换为三个
β磁链分量。它们的对应转换关系如下:
ββψψ=a (21)
βαβψψψ2
1
23--
=b (22) βαβψψψ2
1
23-=
c (23) 2. 磁链自控单元(DMC ),它将输入的β坐标系下的定子磁链a βψ、b βψ、c βψ通过施密特触发器与磁链给定值ug ψ比较,输出开关信号a S ψ、b S ψ、c S ψ。信号
a SU 、
b SU 、
c SU 与a S ψ、b S ψ、c S ψ对应关系如下: a S ψ=c SU ;b S ψ=a SU ;c S ψ=b SU
3.异步电机磁链模型(AMM )。本文采用简单的积分关系得到磁链模型。其中αe 、
βe 为定子电动势在βα-坐标系下的分量。磁链模型的积分关系如下:
αψ=dt e ?α=dt R i u s ?-)(αα (24)
dt e ?=ββψ=dt R i u s ?-)(ββ (25)
式(24)和式(25)中的αu 、βu 可由a u 、b u 、c u 通过2
3坐标变化得到。而αi 、
βi 则可以直接从电机测量得到。
4. 零状态选择单元(AZS ),它提供零电压,转矩大小是通过改变定子磁链运动轨迹平均速度来实现的,为了能够改变磁链轨迹的平均速度就必须引入零电压矢量。而给出零电压工作时间是转矩调节器(ATR )。
5.转矩调节器(ATR ),控制转矩输出信号TQ ,它的原理与磁链调节器一样,也是施密特触发器。如图10所示,当转矩实际值f T 与转矩给定值g T 的差值小于容差m ε-,即f T -g T
6. 转矩计算单元(AMC ),它根据计算式)(2
3
αββαψψs u s u d i i T -=
,
通过输入量αψ、βψ以及测量量αi 、βi 计算得到转矩的大小。
7 异步电动机定子磁链和转矩的估算
在前述均假设s ψ、e T 为已知,而实际上它们一般需要采用间接法,即状态重构方法对它们估计获得值。
7.1 异步电机定子磁链的估算
定子磁链的估算可以分为电压和电流模型两种,电压模型结构图如12。它
的结构简单,理论上很精确,只受定子电阻s R 的影响。但是积分器容易漂移,而且当转速比较低时因为定子电阻压降的存在引入较大的误差。
电流模型如图13,它在低速时比电压模型精确,但是它易受电机参数特别转子时间常数的影响,在高速运行时不如电压模型精确。所以两种模型可以结合起来运用,即低速时采用电流模型,而高速时用电压模型,两种频率分别通过转折频率相同的低、高通滤波器,然后两者相加,用此方法就可以获得精确的定子磁链s ψ。
7.2 异步电机转矩的估计
转矩可以根据计算式)(s s s s p e i i n T αββαψψ-=,通过已获得的定子磁链以及所
测得的定子电流来计算。它的结构如图14。
8 无速度传感器系统转度的估计
本系统采用模型参考自适应 (MRAS )法进行速度辨识 ,其思路如下:在静止标系下 ,将含有真实速度r ω的转子回路方程视为参考模型,将含有待辨识的速度 r ∧
ω的转子回路方程视为可调模型 ,根据波波夫(POPOV )超稳定性定理可得到转速r ω的辨识结果 r ∧
ω,r ∧
ω与定子电流、参考模型和可调模型的状态变量
r ψ,r ∧
ψ有关 。采用模型参考自适应 (MRAS )法可以获得较好的稳定性及较高的控制精度。下面简单介绍模型参考自适应 (MRAS )的原理。辨识器方程如下。 被辨识过程:
U B X A X P p +=.
(26)
且0)0(X X = 并联估计模型:
U t V B Y t V A Y S S ),(),(.
+= (27)
且0)0(Y Y =,0)0(A A S =,0)0(B B S = 输出误差为:
Y X e -= (28)
辨识规律:
De V = (29)
)0()(),(0s T a t
A s A d Y G V F t V A +=?τ (30)
)0()(),(0
s T b t
B s B d U G V F t V B +=?τ (31)
上述方程X 是n 维的过程状态变量,Y 是n 维估计模型的状态变量,U 是m 维输入变量,属于分段连续函数,p A 、p B 是被辨识的恰当维的矩阵,),(t V A s 、
),(t V B s 是估计模型的可调矩阵,它们提供p A 、p B 的一个估计,D 是满足下面
条件的正定矩阵:
1.使传递阵1)()(--=p A sI D s H 为严格正实,所谓的严格正实的条件是:
a 、 传递阵1)()(--=p A sI D s H 右闭平面无极点。
b 、对应所有的实p ,矩阵)()(jp H jp H T -+均为半正定埃而来特矩阵。 则对于任何初始条件)0(X 、)0(Y 、)0(s p A A -、)0(s p B B -及对任何分段连续的输入变量函数U ,保证0lim =∞
?→?t e 。
2.A F 、B F 、a G 、b G 是任意正定矩阵。
对于异步电机及被辨识对象和并联估计模型如下: 辨识对象:
??
?
???+??????=????
??????s s r r r r i i b A dt d
dt d βαβαβαψψψψ (32) 其中????
?
?
??????---=r r r
r L R L
R A ωω,r r m L R
L b = (33) 并联可调模型:
???
???+???
?????=????
?
?????∧∧∧∧
∧∧s s
r r r r i i b A dt d dt d βαβαβαψψψψ (34)
其中??????
?
???
????---=∧∧∧
∧∧
r r r
r L R L R A ωω,r
r m L R L b ∧∧
= 式中r R 、ω认为是时变的,而其他变量认为是常数。 输出误差为:
r r e ∧
-=ψψ (35) 由式(32)-式(34)(假设r ω为常数)得误差方程为:
s r i b b A A Ae e dt
d
)()(∧∧∧-+-+=ψ (36) 令r T a 11=,r a ω=2,r
T a 1
1=∧,r a ∧∧=ω2,r T 为转子时间常数
记:r s m r j a a i L a a W ∧
∧∧∧-+--=ψψ)22())(11( (37) 自适应律为:
)0(1),(),,(120
1∧
∧
++=?a t v F d t v F a t
ττ (38)
)0(2),(),,(220
1∧
∧
++=?a t v F d t v F a t
ττ (39)
由于上面已经提得自适应系统是稳定的,假设转子时间常数r T 可以准确获得,转速r ω与转子阻值的自适应律分别如下:
)0(][][220
21r r r r r r r r t
r r e e k d e e k ∧
∧∧∧∧+-+-=?ωψψτψψωβααββααβ (40)
+-+-=∧
∧∧
?])()([0
11τψψβββαααd i L e i L e K L R r s m r r s m r t
r r
)0()]()([12r r s m r r s m r r R i L e i L e K L ∧
∧∧+-+-βββαααψψ (41)
式中r r r e αααψψ∧-=,r r r e βββψψ∧
-= 双并联型转速观测器如图15:
9 低速范围内的解决方案
本系统工作在低速范围内。在这个范围内,由于转速低(包括零转速),定子电阻压降比较大,可能造成磁链波形畸变,在低频时保持转矩和磁链基本不变等等。对于以上的问题必须实现如下控制目的。(注:在整个转速范围内异步电机的转矩和磁链计算数学模型仍然实用)
1. 控制定子磁链为圆形轨迹,而不用六边形轨迹。
2. 转矩调节器和磁链调节器多功能地调节工作。
3. 用符号比较器确定区段。
4. 调节每个区段的磁链量。
为实现以上四点必须对应采取如下措施: 1. 每个区段电压状态的选择
由于电压型逆变器只有六种工作电压状态,仅能输出六种电压空间矢量。定子磁链空间矢量的运动方向由电压空间矢量的方向确定,只能在六个方向上运行。如果要产生多于六边的多变形的磁链轨迹,就必须通过多个电压空间矢量的组合来形成。控制六边形磁链轨迹只需在每个工作区段接通“工作电压”或“零电压”即可。要实现圆形磁链轨迹可以用足够多的多边形来近似圆形磁链轨迹。在每个工作区段采用四个工作电压状态(0°,+60°,-60°-120°)和两个零电压状态结合使用(具体使用过程在3.8.1节介绍)来实现足够多的多边形轨迹。
2. 磁链与转矩之间的协调调节
低速情况下(一般指15%额定转速以下)转矩调节器的组成部分不变,而磁链调节器却不一样。此时磁链的模为:2
2
βαψψψ+=(六边形磁链的模:
2
c
b a βββψψψψ++=
)。在低速情况下磁链调节器如(图16):
图2-16 磁链与转矩协调器
其中10873.1362
2=??
?
???=πk
当转速大于15%额定转速,开关S 切换到A 处,执行六边形磁链轨迹,当转速小于15%时开关S 切换到B 处,执行圆形磁链轨迹(具体实现如2.3.1节)。磁链开关信号Q ψ与所需的电压状态关系如下:
Q ψ=0时,不需要接通工作电压 Q ψ=1时,接通+60°电压 Q ψ=-1时,接通-60°电压
归纳起来,转矩调节器与磁链调节器的协调控制关系为:由转矩调节器决定应该接通的是零状态电压还是工作电压,在接通工作电压的时间内来选择接通的是-0°、-60°还是+60°电压。
异步电机直接转矩控制的ISR方法研究 直接转矩控制转矩脉动 1引言 目前,矢量控制(VC)和直接转矩控制(DTC)已经被人们公认为是高性能的交流变频调速技术。矢量控制系统采用转子磁链定向,实现了定子电流转矩分量与磁链分量的解耦,可以按线性理论分别设计转速与磁链调节器(一般采用PI调节器),实行连续控制,从而获得较宽的调速范围,但系统易受转子参数变化的影响。直接转矩控制系统则舍去比较复杂的旋转坐标变换,直接在定子静止坐标系上,计算电磁转矩和定子磁链,并用双位式bang-bang控制对转矩和磁链进行调解,受电机参数影响较小,转矩响应快,但由于bang-bang控制本身属于P控制,不可避免地产生转矩脉动,影响系统低速性能。本文介绍的ISR(Indirekte Selbst Regelung)控制策略能有效地减小直接转矩控制中转矩的脉动,具有良好的低速性能及动、静态特性。 2异步电动机动态模型 在定子两相静止坐标系(α,β)中的异步电动机电压方程及电磁转矩方程可表示为: uαs=Rsiαs+PΨαs(1) uβs=Rsiβs+PΨβs(2) (3) 其中:uαs,uβs,iαs,iβs,Ψαs,Ψβs分别是α,β坐标系下定子侧电压,电流,磁链的α,β轴分量:Rs为定子电阻;np为电机极对数;p为微分算子;为电机漏电感为常数;θ为定子磁链与转子磁链的夹角。 由式(1)、(2)式我们可以得到定子两相静止坐标系下定子磁链可表示为: (4) (5) 直接转矩控制的主电路图如图1所示。
图1 直接转矩控制主电路图 其中逆变器的8种开关状态对应了8组电压矢量,如表1所示[1]。 表1 电压矢量表 表2 逆变器电压矢量选择表 为了方便控制定子磁链和电磁转矩,我们把磁链空间矢量划分为6个均等的区域,划分原则是:
收稿日期:2005-04-281 曾国树 男 1952年生;毕业于华侨大学电气工程与自动化专业,实验室主任,现从事电机与控制专业实验教学工作1 异步电机直接转矩控制系统及其仿真 曾国树 方瑞明 华侨大学信息科学与工程学院,福建泉州(362021) 摘 要 阐述了直接转矩控制的基本数学关系,直接转矩的控制系统构成,并在M ATLA B 环境下进行了仿真。仿真结果表明该技术具有优异的静、动态性能,非常适合电力牵引,并阐述了直接转矩控制的发展前景。 关键词 电机 直接转矩 仿真 中图分类号TM 343 文献标识码A 文章编号1008-7281(2005)04-0023-03 Si m ulation of D irect -Torque Control Syste m of A synchronousM otor Zeng G uoshu and Fang Rui m ing Abstract Th is paper i n tr oduces t h e basic m athe m atic re lationsh i p of direc-t torque contro l(DTC ),t h e constructi o n o f direc-t tor que .s contr o l syste m.The si m ulati o n results by usi n g Si m u li n k o fMA tlab i n d icates that this techno logy has pre m i u m dyna m ic and stati c properties and is app licab le to e lectric tracti o n .The fut u re of d irec-t to r que contro l is de -scri b ed . K ey w ords A synchronousM otor ,d irec-t torque contro,l si m u lation . 1 引言 近年来随着交流控制技术的发展,以定子磁链为控制对象的异步电机直接转矩控制技术正受 到人们的广泛重视。直接转矩控制(DTC)的基本思想是同时控制异步电机的定子磁链和电磁转矩。与普通的矢量控制不同,在直接转矩控制闭环中没有电流环。由于直接转矩控制不象矢量控制那样需要进行旋转3/2变换,所以与矢量控制相比大大地简化了控制算法。对于一般的直接转矩控制而言,其逆变器开关状态的选择是通过查开关表得到的,因此它不需要进行脉宽调制也能保证转矩的快速响应,同时也能很简便地得到各相输出电压。而且对于直接转矩控制而言,在高速运行段,除了电机的定子电阻外不需要知道电机的其它参数,所以直接转矩控制对电机参数的依赖度要比矢量控制低。 本文讨论了异步电机直接转矩控制系统,就所遇到的几个问题提出了相应的解决方法。 2 直接转矩控制原理 2.1 异步电机转矩观测模型 在静止两相坐标系下(其直轴A 轴在定子A 相轴线上),异步电机的定、转子磁链如下 定子磁链:7s =(L m +L R s )i s +L m i r (1) 转子磁链:7r =(L m +L R r )i r +L m i s (2) 气隙磁链:7m =L m i s +L m i r (3) 式中,L m )互感;L R s )定子漏感;L R r )转子漏感;i s )定子电流;i r )转子电流。 不同于矢量控制系统,直接转矩控制方法是以定子磁链矢量为基准,并维持其幅值为恒定,其电磁转矩T e 模型可以表示为 T e =K m (7s A i s B -7s B i s A ) (4) 式中,K m )转矩系数;7s A 、7s B 、i s A 、i s B )7s 、i s 在A 、B 轴系上的分量。 根据式(4)构成的转矩观测模型框图如图1所示。 以定子磁链7s 为基准,在定子坐标系中计算定子磁链,受电机参数影响最小,只需知道定子 23 2005年第4期 第40卷(总第125期) (EXPLOSI ON -PROOF ELECTR I C MAC H I N E ) 防爆电机
三相异步电动机习题参考 1 在额定工作情况下的三相异步电动机,已知其转速为960r/min ,试问电动机的同步转速是多少?有几对磁极对数?转差率是多大? 解:∵ n N =960(r/min) ∴n 1=1000(r/min) p=3 04.01000 960100011=-=-=n n n s N 2 有一台六极三相绕线式异步电动机,在f=50HZ 的电源上带额定负载动运行,其 转差率为,求定子磁场的转速及频率和转子磁场的频率和转速。 解:六极电动机,p =3 定子磁场的转速即同步转速n 1=(60×50)/3=1000(r/min) 定子频率f 1=50Hz 转子频率f 2=sf 1=×50=1Hz 转子转速n =n 1(1-s )=1000=980(r/min) 3 Y180L-4型电动机的额定功率为22kw ,额定转速为1470r/min ,频率为50HZ ,最大电磁转矩为。 试求电动机的进载系数入? 解:1431470 22955095502=?=?=N N N n P T 2.2143 6.314===N m T T λ 4 已知Y180M-4型三相异步电动机,其额定数据如下表所示。 求:(1)额定电流I N ; (2)额定转差率S N ; (3)额定转矩T N ;最大转矩T M 、启动转矩Tst 。 解:(1)额定电流I N ==N N N N U P η?cos 31=91.086.03803105.18????=(A) (2)额定转差率S N =(1500-1470)/1500=
(3)额定转矩T N =9550×1470=120 最大转矩T M =×120=264 启动转矩Tst=×120=240 5 Y225-4型三相异步电动机的技术数据如下:380v 、50HZ 、△接法、定子输入功率P 1N =、定子电流I 1N =、转差率S N =,轴上输出转矩T N =,求:(1)电动机的转速n 2,(2)轴上输出的机械功率P 2N ,(3)功率因数N ?cos (4)效率ηN 。 解:(1)从电动机型号可知电动机为4极电机,磁极对数为p =2,由 1 21n n n s -= 所以 1480)013.01(1500)1(12=-?=-=s n n (r/min) (2)∵N N m n P T 29550? = ∴45955014804.29095502=?==N m N n T P (KW ) (3) ∵N L L N Cos I U P ?3 1= ∴88.02 .8438031075.4833 1=???==L L N N I U P Cos ? (4)923.075.484512===N N N P P η 6 四极三相异步电动机的额定功率为30kw ,额定电压为380V ,三角形接法,频率为50HZ 。在额定负载下运动时,其转差率为,效率为90%,电流为,试求:(1)转子旋转磁场对转子的转速;(2)额定转矩;(3)电动机的功率因数。 解:(1)转子旋转磁场对转子的转速n 2=Sn 1=×1500=30 (r/min) (2)额定转矩T N =9550×30/1470= (3)电动机的功率因数88.09 .05.573803103033 =????==N L L N N I U P Cos η? 7 上题中电动机的T st /T N =,I st /I N =7,试求:(1)用Y-△降压启动时的启动电流和启动转矩;(2)当负载转矩为额定转矩的60%和25%时,电动机能否启动? 解:(1)用Y-△降压启动时的启动电流I ST =7×3=134(A) 用Y-△降压启动时的启动转矩T st=×3=(Nm) (2)因为 T st=, 当负载转矩为额定转矩的60%时, 由于T st 小于负载转矩,电动机不能启动。 当负载转矩为额定转矩的25%时,由于T st 大于负载转矩,电动机可以启动。
三相异步电机的转矩特性与机械特性 1.电磁转矩(简称转矩) 异步电动机的转矩T 是由旋转磁场的每极磁通Φ与转子电流I 2相互作用而产生的。电磁转矩的大小与转子绕组中的电流I 及旋转磁场的强弱有关。 经理论证明,它们的关系是: 22cos T T K I ?=Φ (5-4) 其中 T 为电磁转矩 K T 为与电机结构有关的常数 Φ为旋转磁场每个极的磁通量 I 2为转子绕组电流的有效值 ?2为转子电流滞后于转子电势的相位角 若考虑电源电压及电机的一些参数与电磁转矩的关系,(5-4)修正为: 22122220()T sR U T K R sX '=+ (5-5) 其中 T K '为常数 U 1为定子绕组的相电压 S 为转差率 R 2为转子每相绕组的电阻 X 20为转子静止时每相绕组的感抗 由上式可知,转矩T 还与定子每相电压U 1的平方成比例,所以当电源电压有所变动时,对转矩的影响很大。此外,转矩T 还受转子电阻R 2的影响。图4-15为异步电动机的转矩特性曲线。 2.机械特性曲线 图 5-5 三相异步电动机的机械特性曲线 在一定的电源电压U 1和转子电阻R 2下,电动机的转矩T 与转差率n 之间的n n m (a) T =f (s )曲线
关系曲线T=f(s)或转速与转矩的关系曲线n=f(T),称为电动机的机械特性曲线,它可根据式(5-4)得出,如图5-5所示。 在机械特性曲线上我们要讨论三个转矩: 1).额定转矩T N 额定转矩T N 是异步电动机带额定负载时,转轴上的输出转矩。 29550N P T n = (5-6) 式中P 2是电动机轴上输出的机械功率,其单位是瓦特,n 的单位是转/分,T N 的单位是牛·米。 当忽略电动机本身机械摩擦转矩T 0时,阻转矩近似为负载转矩T L ,电动机作等速旋转时,电磁转矩T 必与阻转矩T L 相等,即T = T L 。额定负载时,则有T N = T L 。 2).最大转矩T m T m 又称为临界转矩,是电动机可能产生的最大电磁转矩。它反映了电动机的过载能力。 最大转矩的转差率为S m ,此时的S m 叫做临界转差率,见图5-5(a ) 最大转矩Tm 与额定转矩T N 之比称为电动机的过载系数λ,即 λ= Tm / T N 一般三相异步的过载系数在1.8~2.2之间。 在选用电动机时,必须考虑可能出现的最大负载转矩,而后根据所选电动机的过载系数算出电动机的最大转矩,它必须大于最大负载转矩。否则,就是重选电动机。 3).起动转矩T st , T st 为电动机起动初始瞬间的转矩,即n=0,s =1时的转矩。 为确保电动机能够带额定负载起动,必须满足:T st >T N ,一般的三相异步电动机有T st /T N =1~2.2。 3.电动机的负载能力自适应分析 电动机在工作时,它所产生的电磁转矩T 的大小能够在一定的范围内自动调整以适应负载的变化,这种特性称为自适应负载能力。 2 L T n S I T ↑?↓?↑?↑?↑直至新的平衡。此过程中,2I ↑时,1 I ↑? 电源提供的功率自动增加。
异步电动机直接转矩控制系统 1 直接转矩控制简介 直接转矩控制(Direct Torque Control—DTC),国外的原文有的也称为Direct self-control—DSC,直译为直接自控制,这种“直接自控制”的思想以转矩为中心来进行综合控制,不仅控制转矩,也用于磁链量的控制和磁链自控制。直接转矩控制与矢量控制的区别是,它不是通过控制电流、磁链等量间接控制转矩,而是把转矩直接作为被控量控制,其实质是用空间矢量的分析方法,以定子磁场定向方式,对定子磁链和电磁转矩进行直接控制的。这种方法不需要复杂的坐标变换,而是直接在电机定子坐标上计算磁链的模和转矩的大小,并通过磁链和转矩的直接跟踪实现PWM脉宽调制和系统的高动态性能。直接转矩控制系统的主要特点有: (1)直接转矩控制是直接在定子坐标系下分析交流电动机的数学模型,控制电动机的磁链和转矩。 (2)直接转矩控制的磁场定向采用的是定子磁链轴,只要知道定子电阻就可以把它观测出来。 (3)直接转矩控制采用空间矢量的概念来分析三相交流电动机的数学模型和控制各物理量,使问题变得简单明了。 (4)直接转矩控制强调的是转矩的直接控制效果。 直接转矩控制技术用空间矢量的分析方法,直接在定子坐标系下计算与控制电动机的转矩,采用定子磁场定向,借助于离散的两点式调节(Band-Band)产生PWM 波信号,直接对逆变器的开关状态进行最佳控制,以获得转矩的高动态性能。它省去了复杂的矢量变换与电动机的数学模型简化处理,没有通常的PWM 信号发生器。它的控制思想新颖,控制结构简单,控制手段直接,信号处理的物理概念明确。 为了让读者更好的理解直接转矩控制,在正式介绍三相异步电机的直接转矩控制系统前,先从直接转矩控制的基本物理概念讲起。 2 直接转矩控制的基本物理概念 2.1 直接转矩控制中磁通和转矩的测量 在几种用于控制感应电机的方法中,直接转矩控制(DTC)占有很重要的地位。DTC 将转矩和定子磁通分别控制在两个滞环内,这就意味着转矩和磁通各自被限制在最大值和最小值的范围内。
第四章 三相异步电动机 一、 填空(每空1分) 1. 如果感应电机运行时转差率为s ,则电磁功率,机械功率和转子铜耗之间的比例是 2:P :e Cu P p Ω= 。 答 s :s)(1:1- 2. ★当三相感应电动机定子绕组接于Hz 50的电源上作电动机运行时,定子电流的频率为 ,定子绕组感应电势的频率为 ,如转差率为s ,此时转子绕组感应电势的频率 ,转子电流的频率为 。 答 50Hz ,50Hz ,50sHz ,50sHz 3. 三相感应电动机,如使起动转矩到达最大,此时m s = ,转子总电阻值约为 。 答 1, σσ21X X '+ 4. ★感应电动机起动时,转差率=s ,此时转子电流2I 的值 , 2cos ? ,主磁通比,正常运行时要 ,因此起动转矩 。 答 1,很大,很小,小一些,不大 5. ★一台三相八极感应电动机的电网频率Hz 50,空载运行时转速为735转/分,此时转差率为 ,转子电势的频率为 。当转差率为时,转子的转速为 ,转子的电势频率为 。 答 ,1Hz , 720r/min ,2Hz 6. 三相感应电动机空载时运行时,电机内损耗包括 , , ,和 ,电动机空载输入功率0P 与这些损耗相平衡。 答 定子铜耗,定子铁耗,机械损耗,附加损耗 7. 三相感应电机转速为n ,定子旋转磁场的转速为1n ,当1n n <时为 运行状态;当1n n >时为 运行状态;当n 与1n 反向时为 运行状态。
答 电动机, 发电机,电磁制动 8. 增加绕线式异步电动机起动转矩方法有 , 。 答 转子串适当的电阻, 转子串频敏变阻器 9. ★从异步电机和同步电机的理论分析可知,同步电机的空隙应比异步电机的空气隙要 ,其原因是 。 答 大,同步电机为双边励磁 10. ★一台频率为 160Hz f =的三相感应电动机,用在频率为Hz 50的电源上(电压不变),电动机的最大转矩为原来的 ,起动转矩变为原来的 。 答 265??? ??,2 65?? ? ?? 二、 选择(每题1分) 1. 绕线式三相感应电动机,转子串电阻起动时( )。 A 起动转矩增大,起动电流增大; B 起动转矩增大,起动电流减小; C 起动转矩增大,起动电流不变; D 起动转矩减小,起动电流增大。 答 B 2. 一台50Hz 三相感应电动机的转速为min /720r n =,该电机的级数和同步转速为 ( )。 A 4极,min /1500r ; B 6极,min /1000r ; C 8极,min /750r ; D 10极,min /600r 。 答 C 3. ★笼型三相感应电动机的额定状态转速下降%10,该电机转子电流产生的旋转磁动势 相对于定子的转速( )。 A 上升 %10; B 下降%10; C 上升 %)101/(1+; D 不变。 答 D 4. 国产额定转速为min /1450r 的三相感应电动机为( )极电机。
三相异步电动机直接转 矩控制系统仿真报告 Document number:PBGCG-0857-BTDO-0089-PTT1998
三相异步电动机直接转矩控制系统仿真报告 摘要:利用直接转矩控制( DTC )理论,研究异步电动机直接转矩控制调速系统的基本组成 和工作原理,建立了异步电动机直接转矩控制系统的仿真模型。利用MATLAB /Simulink软件对异步电动机直接转矩控制系统进行建模和仿真。结果表明: DTC系统具有动态响应速度快、精度高、易于实现的优点。仿真结果验证了该模型的正确性和该控制系统的有效性。 关键词:异步电机;直接转矩控制; MATLAB仿真 1 引言 自从20世纪70年代矢量控制技术发展以来,交流拖动技术就从理论上解决了交流调速系统在静动态性能上与直流调速系统相媲美的问题。所谓矢量控制,就是将交流电动机模拟成直流电动机来控制,通过坐标变换实现电机定子电流的励磁分量和转矩分量的解耦,然后分别独立控制,从而获得高性能的转矩和转速响应特性。 直接转矩控制(Direct Torque Control DTC)是在矢量控制基础之上发展起来的,是继矢量控制以后提出的又一种异步电动机控制方法。其思路是把异步电动机和逆变器看成是一个整体,采用电压矢量分析方法直接在静止坐标系下分析和计算电动机的转矩和磁链,通过磁链跟踪得出PWM逆变器的开关状态切换的依据从而直接控制电动机转矩"与矢量控制相比,直接转矩控制的主要优点是:在定子坐标系下对电动机进行控制,摒弃了矢量控制中的解藕思想,直接控制电动机的磁链和转矩,并用定子磁链的定向代替转子磁链的定向,避开了电动机中不易确定的参数(转子电阻)"由于定子磁链的估算只与相对比较容易测量的定子电阻有关,所以使得磁链的估算更容易、更精确,受电动机参数变化的影响也更小"此外,直接转矩控制通过直接输出转矩和磁链的偏差来确定电压矢量,与以往的调速方法相比,它具有控制直接!计算过程简化的优点"因此,直接转矩控制一问世便受到广泛关注,目前国内外围绕直接转矩控制的研究十分活跃。 2 三相异步电机的直接转矩控制系统组成 三相异步电动机直接转矩控制系统模块图标如图1所示,其仿真模型如图2所示,模型由7个主要模块组成:三相不控整流器
三相异步电动机转速及力 矩计算 The Standardization Office was revised on the afternoon of December 13, 2020
三相异步电动机转速及力矩计算 电动机扭矩计算 扭矩是力对物体作用的一种形式,它使物体产生转动,其作用大小等于作用力和力臂(作用力到转动中心的距离)的乘积。所以扭矩的单位是力的单位和距离的单位的乘积,即牛顿*米,简称牛米 计算公式是 T=9550 * P / n P是额定(输出)功率单位是千瓦(KW) n 是额定转速单位是转每分 (r/min) P和 n可从电机铭牌中直接查到。 三相异步电动机转速公式为: n=60f/p(1-s) N0=60F/P (同步电动机) 从上式可见,改变供电频率f、电动机的极对数p及转差率s均可太到改变转速的目的。从调速的本质来看,不同的调速方式无非是改变交流电动机的同步转速或不改变同步转两种。 在生产机械中广泛使用不改变同步转速的调速方法有绕线式电动机的转子串电阻调速、斩波调速、串级调速以及应用电磁转差离合器、液力偶合器、油膜离合器等调速。改变同步转速的有改变定子极对数的多速电动机,改变定子电压、频率的变频调速有能无换向电动机调速等。 从调速时的能耗观点来看,有高效调速方法与低效调速方法两种:高效调速指时转差率不变,因此无转差损耗,如多速电动机、变频调速以及能将转差损耗回收的调速方法(如串级调速等)。有转差损耗的调速方法属低效调速,如转子串电阻调速方法,能量就损耗在转子回路中;电磁离合器的调速方法,能量损耗在离合器线圈中;液力偶合器调速,能量损耗在液力偶合器的油中。一般来说转差损耗随调速范围扩大而增加,如果调速范围不大,能量损耗是很
现代电力传动及其自动化 —课程作业
异步电动机直接转矩控制系统仿真 1、直接转矩控制系统的基本思想 直接转矩控制系统简称 DTC ( Direct Torque Control) 系统,在它的转速环里面,利用转矩反馈直接控制电机的电磁转矩,因而得名。直接转矩控制是标量控制。它借助于逆变器提供的电压空间矢量,直接对异步电动机的转矩和定子磁链进行二位控制,也称为砰-砰(bang-bang )控制。 三相异步电动机电磁转矩表达式为: ))()((m e t t K T r s ΨΨ?= )(sin m t K r s θψψ= (1.1) r s ψψ、分别为定子、转子磁链的模值,)(t θ为定子、转子磁链之间的夹角, 称为磁通角。 对式(1.1)分析,电磁转矩决定于定子磁链和转子磁链的矢量积,即决定于两种幅值和其间的空间电角度。若r s ψψ、 是常数,改变转矩角可改变转矩。而且Ψr 的变化总是滞后于Ψs 的变化。但是在动态过程中,由于控制的响应时间比转子的时间常数小得多,在短暂的过程中,就可以认为Ψr 不变。可见只要通过控制保持Ψs 的幅值不变,就可以通过调节转矩角来改变和控制电磁转矩,这是直接转矩控制的基本原理。 图1.1 直接转矩控制系统原理图 ω
在定子两相静止坐标系下,根据磁链给定值与异步电机的实际磁链观测值相比较得到磁链误差,进而确定磁链的调节方向,根据给定的电磁转矩值与异步电机的实际电磁转矩观测值相比较得到转矩误差,进而确定转矩的调节方向,然后根据定子磁链信号、转矩信号以及定子磁链所在位置确定选择合适的电压空间矢量,从而确定三相电压源逆变器的开关状态,使异步电机的电磁转矩快速跟踪外部给定的电磁转矩值。 由图1.1得直接转矩控制系统仿真结构框图,如图1.2所示。 图1.2 直接转矩控制系统仿真结构框图 2、单元模块说明 2.1 定子电压与定子电流的三二变换 三相/两相变换矩阵如式(2.1),其仿真结构框图如图2.1所示。
天津科技大学本科生毕业设计(论文)开题报告 学院电子信息与自动化学院 专业 2007电气工程及其自动化 题目异步电机直接转矩控制系统研究 姓名杨乐 指导教师(签名) 年月日
拟选题目异步电机直接转矩控制系统研究 选题依据及研究意义 直接转矩控制技术是继矢量控制技术之后发展起来的一种新型、高性能变频调速技术。它利用空间矢量分析方法,直接在定子坐标系下计算和控制交流电机的转矩,采用定子磁场定向,通过对转矩和磁链的滞环控制产生PWM信号,直接对逆变器的开关状态进行最佳控制,以获得系统的高动态性能。它不像矢量控制那样,将交流电动机与直流电动机作比较、等效和转化,更不需要模仿直流电动机的控制而要求利用解耦后的简化交流电动机数学模型来实现对转矩的间接控制,具有转矩响应快、控制结构简单、易于实现全数字化的特点,得到广泛应用。 随着经济的发展,在诸多领域里利用高性能的交流调速逐步替代价格较高的直流调速是一个趋势。而直接转矩控制是高性能交流调速技术中潜力最大的一种,而且其控制方法本身非常适合全数字化实现,这一点正和现在飞速发展的电子技术相适应,所以对其进行深入的研究具有良好的现实意义。 文献综述(对已有相关代表性研究成果的综合介绍与评价) 1985年德国学者Depenbrock和日本学者Takahashi相继提出异步电机的直接转矩控制(DTC)思想。DTC是继矢量控制之后发展起来的一种高性能交流调速技术。DTC直接在定子坐标下计算和控制转矩,并采用定子磁链定向控制,产生最佳PWM信号,从而对逆变器开关状态进行最优控制,以获得高动态性能的转矩控制。DTC摒弃了复杂的矢量变换与计算,大大减少矢量控制性能易受参数变化影响的问题,结构简单,易于数字化控制。DTC的研究虽然已取得了很大进展,但是它在理论和实践上还不够成熟,如低速性能差、脉动转矩大、限制了系统的调速范围。矢量控制和直接转矩控制都属于磁场定向控制,前者是转子磁场定向控制,而后者是一种特殊的定子磁场定向控制。 直接转矩控制技术一诞生,就以自己新颖的控制思想,简洁明了的系统结构,优良的静态性能受到了普遍的关注和得到了迅速的发展。DTC在德国经过10多年的发展,其低速性能和高速域的谐波处理,都有明显的改善,并进入实用阶段。目前DTC己经成功地应用于大功率高速电力机车、地铁、城市有轨电车的传动控制系统,例如穿越英吉利海峡的高速列车采用的就是DTC系统。德国、日本、瑞典、美国等都投入了大量的人力、物力和资金来开发和发展此项新技术。我国对DTC仍处于仿真和实验阶段,仍有不少控制性能问题和应用问题有待解决。
目录 摘要 .................................................................................................................. I 1 设计总体思路 (1) 1.1主电路的设计 (1) 1.2 基本原理 (1) 2 单元电路设计 (3) 2.1 直接转矩控制系统模型 (3) 2.2 转速控制器 (4) 2.3 直接转矩控制器 (4) 2.4 转矩和定子磁链的计算 (5) 2.5 磁通和转矩滞环控制器 (6) 2.6 磁链选择器 (6) 2.7 开关表 (7) 2.8 开关控制模块 (8) 3 实验仿真、实验波形记录及分析 (9) 4 总结 (12) 5 附录 (13) 参考文献 (14)
1 设计总体思路 1.1主电路的设计 直接转矩控制系统简称DTC(Direct torque control)系统,是继矢量控制系统之后发展起来的另一种高动态性能的交流电动机变压变频调速系统。在他的转速环里面,利用转矩反馈直接控制电动机的电磁转矩,因而得名。 直接转矩控制系统的基本思想是根据定子磁链幅值偏差s ψ?的正负符号和电磁转矩偏差e T ?的正负符号,再根据当前定子磁链的矢量s ψ所在的位置,直接选取合适的电压空间矢量,减小定子磁链幅值的偏差和电磁转矩的偏差,实现电磁转矩与定子磁链的控制。 系统主电路如图1.1所示,由三相不控桥、交流母线、三相逆变器和异步电机组成,2812DSP 的脉冲信号控制全控器件的导通。 图1.1 系统主电路图 1.2 基本原理 直接转矩控制系统的原理结构如图1.2示,途中的A R ψ和ATR 分别为定子磁链调节器和转矩调节器,两者均采用带有滞环的双位式控制器,他们的输出分别为定子磁链幅值偏差s ψ?的符号函数sgn(s ψ)和电磁转矩偏差e T 的符号函数sgn(e T ?),如图1.2所示。
三相异步电机的转矩特性与机械特性 1电磁转矩(简称转矩) 异步电动机的转矩T 是由旋转磁场的每极磁通 与转子电流|2相互作用而产 生 的。电磁转矩的大小与转子绕组中的电流 I 及旋转磁场的强弱有关。 经理论证明,它们的关系是: T K T 12 COS 2 其中 T 为电磁转矩 K T 为与电机结构有关的常数 为旋转磁场每个极的磁通量 I 2为转子绕组电流的有效值 2为转子电流滞后于转子电势的相位角 若考虑电源电压及电机的一些参数与电磁转矩的关系, (5-4)修正为: (5-5) 其中 K T 为常数 U i 为定子绕组的相电压 S 为转差率 R 2为转子每相绕组的电阻 X 20为转子静止时每相绕组的感抗 由上式可知,转矩T 还与定子每相电压U i 的平方成比例,所以当电源电压 有所变动时,对转矩的影响很大。此外,转矩T 还受转子电阻R 2的影响。图4-15 为异步电动机的转矩特性曲线。 2. 机械特性曲线 (a) T=f(s)曲线 (b) n 二f(T)曲线 图5-5三相异步电动机的机械特性曲线 在一定的电源电压U i 和转子电阻R 2下,电动机的转矩T 与转差率n 之间的 关系(5-4) K T R ; (sx 』
曲线T=f(s)或转速与转矩的关系曲线n=f(T),称为电动机的机械特性曲线,它可根据式(5-4)得出,如图5-5所示。 在机械特性曲线上我们要讨论三个转矩: 1).额定转矩T N 额定转矩T N是异步电动机带额定负载时,转轴上的输出转矩。 F2 T N 9550」 n (5-6) 式中P2是电动机轴上输出的机械功率,其单位是瓦特,n的单位是转/分,T N的单位是牛?米。 当忽略电动机本身机械摩擦转矩T o时,阻转矩近似为负载转矩T L,电动机作等速旋转时,电磁转矩T必与阻转矩T L相等,即T= T L。额定负载时,则有T N= T L O 2).最大转矩T m T m又称为临界转矩,是电动机可能产生的最大电磁转矩。它反映了电动机的过载能力。 最大转矩的转差率为S rn,此时的&叫做临界转差率,见图5-5 (a) 最大转矩Tm与额定转矩T N之比称为电动机的过载系数,即 =Tm/ T N 一般三相异步的过载系数在1.8 2.2之间。 在选用电动机时,必须考虑可能出现的最大负载转矩,而后根据所选电动机 的过载系数算出电动机的最大转矩,它必须大于最大负载转矩。否则,就是重选电动机。 3).起动转矩T st, T st为电动机起动初始瞬间的转矩,即n=0,s=l时的转矩。 为确保电动机能够带额定负载起动,必须满足:T st T N, —般的三相异步电 动机有T st/T N=1 2.2。 3 .电动机的负载能力自适应分析 电动机在工作时,它所产生的电磁转矩T的大小能够在一定的范围内自动调整以适应负载的变化,这种特性称为自适应负载能力。 T L n S I2 T直至新的平衡。此过程中,12时,I1 电源提供的功率自动增加。
异步电动机直接转矩控制 系统仿真 Prepared on 24 November 2020
现代电力传动及其自动化 —课程作业 异步电动机直接转矩控制系统仿真 1、直接转矩控制系统的基本思想 直接转矩控制系统简称 DTC ( Direct Torque Control) 系统,在它的转速环里面,利用转矩反馈直接控制电机的电磁转矩,因而得名。直接转矩控制是标量控制。它借助于逆变器提供的电压空间矢量,直接对异步电动机的转矩和定子磁链进行二位控制,也称为砰-砰(bang-bang )控制。 三相异步电动机电磁转矩表达式为: )(sin m t K r s θψψ= r s ψψ、分别为定子、转子磁链的模值,)(t θ为定子、转子磁链之间的夹 角,称为磁通角。 对式()分析,电磁转矩决定于定子磁链和转子磁链的矢量积,即决定于两种幅值和其间的空间电角度。若r s ψψ、 是常数,改变转矩角可改变转矩。而且Ψr 的变化总是滞后于Ψs 的变化。但是在动态过程中,由于控制的响应时间比转子的时间常数小得多,在短暂的过程中,就可以认为Ψr 不变。可见只要通过控制保持Ψs 的幅值不变,就可以通过调节转矩角来改变和控制电磁转矩,这是直接转矩控制的基本原理。
图直接转矩控制系统原理图 在定子两相静止坐标系下,根据磁链给定值与异步电机的实际磁链观测值相比较得到磁链误差,进而确定磁链的调节方向,根据给定的电磁转矩值与异步电机的实际电磁转矩观测值相比较得到转矩误差,进而确定转矩的调节方向,然后根据定子磁链信号、转矩信号以及定子磁链所在位置确定选择合适的电压空间矢量,从而确定三相电压源逆变器的开关状态,使异步电机的电磁转矩快速跟踪外部给定的电磁转矩值。 由图得直接转矩控制系统仿真结构框图,如图所示。
三相异步电动机的运行特性 摘要:本章介绍了三相异步电动机的机械特性的三个表达式.固有机械特性和人为机械特性,阐述了三相异步电动机的起动、调速和制动的各种方法、特点和应用 5。1三相异步电动机的运行特性三相异步电动机的运行特性就是三相异步电动机的运行工作时的机械特性。和直流电动机一样,三相异步电动机的机械特性也是指电磁转矩与转子转速之间的关系。由于转子转速与同步转速、转差率存在下列关系,即 (5。1)则三相异步电动机的机械特性用曲线表示时,习惯上纵坐标同时表示转速和转差率,横坐标表示电磁转矩. 三相异步电动机的机械特性有三种表达式,现介绍如下: 5.1.1机械特性的物理表达式
由上一章三相异步电动机的转矩关系知,三相异步电动机转矩的一般表达式为 (5。2)式中为三相异步电动机的转矩系数,是一常数; 为三相异步电动机的气隙每极磁通量; 为转子电流的折算值; 为转子电路的功率因数; 式(5.2)表明了电磁转矩与磁通量和转子电流的有功分量的乘积成正比,它是电磁力定律在三相异步电动机的应用,它从物理特性上描述了三相异步电动机的运行特性,因此这一表达式又称为三相异步电动机的物理表达式。 仅从式(5.2)不能明显地看出电磁转矩与转差率之间的变化规律。要从分析气隙每极磁通量,转子相电流,以及为转子功率因数与转差率之间的关系,间接地找出其变化规律.现分析如表5。1所示。
根据表5。1中的分析,可作出曲线、和 分别如图5。2、5.3、5。4所示,据此可得出图5。1所示的机械特性曲线。曲线分为两段:当较小时(),变化不大,,电磁转矩与转子相电流成正比关系,表现为AB段近似为直线,称为直线部分;当较大时(),如, 减少近一半, 很小,尽管转子相电流增大,有功电流不大,使电磁转矩反而减小了,此时表现为 段,段为曲线段,称为曲线部分.由此分析知,三相异步电动机的机械特性在某转差率下,产生最大转矩,即点称为最大转矩点,相应的转矩为称为最大转矩,对应的转差率称为临界转差率。 5。1.2机械特性的参数表达式 1.参数表达式的推导: 三相异步电动机的机械特性的参数表达式就是直接表示异步电动机 的电磁转矩与转差率和电机的某些参数(及阻抗等)之间的关系的数学表达式。现推导如下:
矢量控制与直接转矩控 制技术区别 文稿归稿存档编号:[KKUY-KKIO69-OTM243-OLUI129-G00I-FDQS58-
矢量控制与直接转矩控制技术 矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。具体是将异步电动机的定子电流矢量分解为产生磁场的电流分量 (励磁电流) 和产生转矩的电流分量 (转矩电流) 分别加以控制,并同时控制两分量间的幅值和相位,即控制定子电流矢量,所以称这种控制方式称为矢量控制方式。矢量控制方式又有基于转差频率控制的矢量控制方式、无速度传感器矢量控制方式和有速度传感器的矢量控制方式等。这样就可以将一台三相异步电机(同步电机是指转子定子同时通电,异步机就是电机的转子转动速度与定子所产生的旋转磁场的旋转速度不一样,有转差值,顾名思义,同步机则不存在转差)等效为直流电机来控制,因而获得与直流调速系统同样的静、动态性能。 基于转差频率控制的矢量控制方式同样是在进行U / f =恒定控制的基础上,通过检测异步电动机的实际速度n,并得到对应的控制频率f,然后根据希望得到的转矩,分别控制定子电流矢量及两个分量间的相位,对通用变频器的输出频率f进行控制的。基于转差频率控制的矢量控制方式的最大特点是,可以消除动态过程中转矩电流的波动,从而提高了通用变频器的动态性能。早期的矢量控制通用变频器基本上都是采用的基于转差频率控制的矢量控制方式。 无速度传感器的矢量控制方式是基于磁场定向控制理论发展而来的。实现精确的磁场定向矢量控制需要在异步电动机内安装磁通检测装置,要在异步电动机内安装磁通检测装置是很困难的,但人们发现,即使不在异步电动机中直接安装磁通检测装置,也可以在通用变频器内部得到与磁通相应的量,并由此得到了所谓的无速度传感器的矢量控制方式。它的基本控制思想是根据输入的电动机的铭牌参数,按照转矩计算公式分别对作为基本控制量的励磁电流(或者磁通)和转矩电流进行检测,并通过控制电动机定子绕组上的电压
三相异步电动机的电磁转矩 由三相异步电动机的转动原理可知,驱动电机旋转的电磁转矩是由转子导体中的电流与旋转磁场每极磁通相互作用而产生的,因此电磁转矩。 由于转子电路是一个交流电路,有电阻和感抗的存在,滞后(相位差),则转子电流中的有功分量与旋转磁场相互作用而产生电磁转矩,故 ,kr.是与电动机结构有关的常数类比:三相异步电动机的电磁关系与变压器相似。 定子电路和转子电路相当于变压器的原、副绕组,如下图示,其旋转磁场的主磁通将定子和转子交链在一起。 对电动机而言,一般副边是短接的,形成回路电流。 当定子绕组接上三相电源电压(相电压)时,则有三相电流(相电流)通过。定子三相电流产生旋转磁场,其磁通通过定子和转子铁芯闭合。这磁场不仅在转子每相绕组中感应出电动势(由此产生
电流),而且在定子每相绕组中也要感应出电动势(实际上三相异步电动机中的旋转磁场是由定子电流和转子电流共同产生的)。此外,还有漏磁通,在定子绕组和转子绕组中感应出漏磁电动势和。 1、定子电路 定子每相电路的电压方程和变压器原绕组电路的一样,即 。 相量式如下 和变压器一样,也可得出和 注:如果考虑电动机定子绕组按一定规律沿定子铁芯内圆周分布而引入的绕组系数,则公式可写为,一般。 定子部分产生的旋转磁场转速。 2、转子电路 转子每相电路的电压方程为 此式中转子电路的各个物理量对电动机的性能都有影响,分述如下: (1)转子频率 因为旋转磁场和转子间的相对转速为(),所以转子频率为 显然,与转差率s有关,也就是与n有关。 当,即时(电动机起动初始瞬间),转子与旋转磁场间
的相对转速最大,转子导条被旋转磁场切割的最快。所以这时最高,。 (2)转子电动势 转子电动势的有效值为: 当,即时,转子电动势为: 这时,转子电动势最大。则有,可见转子电动势 与转差率s有关。 (3)转子感抗 转子感抗与转子频率有关,即 当,即时,转子感抗为 这时,转子感抗最大。则有,可见转子感抗与转差率s有关。 (4)转子电流 转子每相电路的电流 可见转子电流也与转差率s有关。当s↑,即转速n↓时,转子与旋转磁场间的相对旋速增加↑,转子导体切割磁通的速度
异步电动机直接转矩控制系统的仿真研究 作者 (上海交通大学,上海,邮编:200030) 摘要:针对异步电机交流调速系统的特点,采用了直接转矩控制(DTC )交流变频调速方案。直接对电机定子磁链和电磁转矩进行控制,避免了矢量控制中复杂的变换和参数运算,使控制结构变得十分简单。应用MATLAB/Simulink 对直接转矩控制的定子磁链近似圆形控制的方法进行了仿真,从理论上证明了这种方法的可行性,并且对仿真波形进行分析,验证系统的正确性; 关键词:直接转矩;MATLAB/Simulink ;异步电动机 Research on asynchronous motor direct self-control system simulation Xxx (Shanghai Jiao Tong University Shanghai Postcard 200030) Abstract :In view of the characteristics of storage Asynchronous motor drive system using an advanced AC frequency converter program: Direct Torque Control (DTC), which directly to control the motor stator flux and torque, the method of DTC avoid the computational complexity of the transformation parameters, which control structure is very simple.The simulation models of approximate circle flux control system are presented based on the application of MATLAB/Simulink by the author. The feasibility and correctness of this method are testified in theory and the correlative waveforms which can explain the advantage of system are captured. Key Word :DTC, MATLAB/Simulink, Asynchronous motor 1 引言 1985年德国鲁尔大学MDepenbrock 教授首次提出了直接转矩控制(DTC)理论。该理论的核心是摒弃了矢量控制技术中过于繁杂的解耦思想,简单地借助三相定子电压和电流在静止坐标系中直接计算磁链和转矩,与给定值进行比较后,再通过两点式或多点式调节控制实现高性能的调速控制。它在很大程度上解决了矢量控制中计算控制复杂、特性易受电动机参数变化的影响、实际性能难于达到理论分析结果等一些重大问题。 直接转矩控制直接在定子坐标系下分析交流电动机的数学模型、控制电动机的磁链和转矩,不像矢量控制,将交流电动机与直流电动机作比较、等效和转化,更不需要模仿直流电动机的控制而要求利用解耦后的简化交流电动机数学模型来实现对转矩的间接控制,使系统结构变得十分简单,更为容易实现。 2 异步电动机数学模型 电路是在正交定子坐标系(βα-坐标系)下描述异步电动机的,各量的意义如下: s u ? :定子电压空间矢量 s i ? :定子电流空间矢量 r i ? :转子电流空间矢量 μ ψ ? :定子磁链空间矢量 r ? ψ:转子磁链空间矢量 ω :电角速度(机械角速度与极对数之积) 异步电动机在定子坐标系下的特性可用如下方程式表示: μ ψ ? +=s s i R s u (1)