
“备份文档”指从真实机器人上备份下来的文档。
新系统创建:
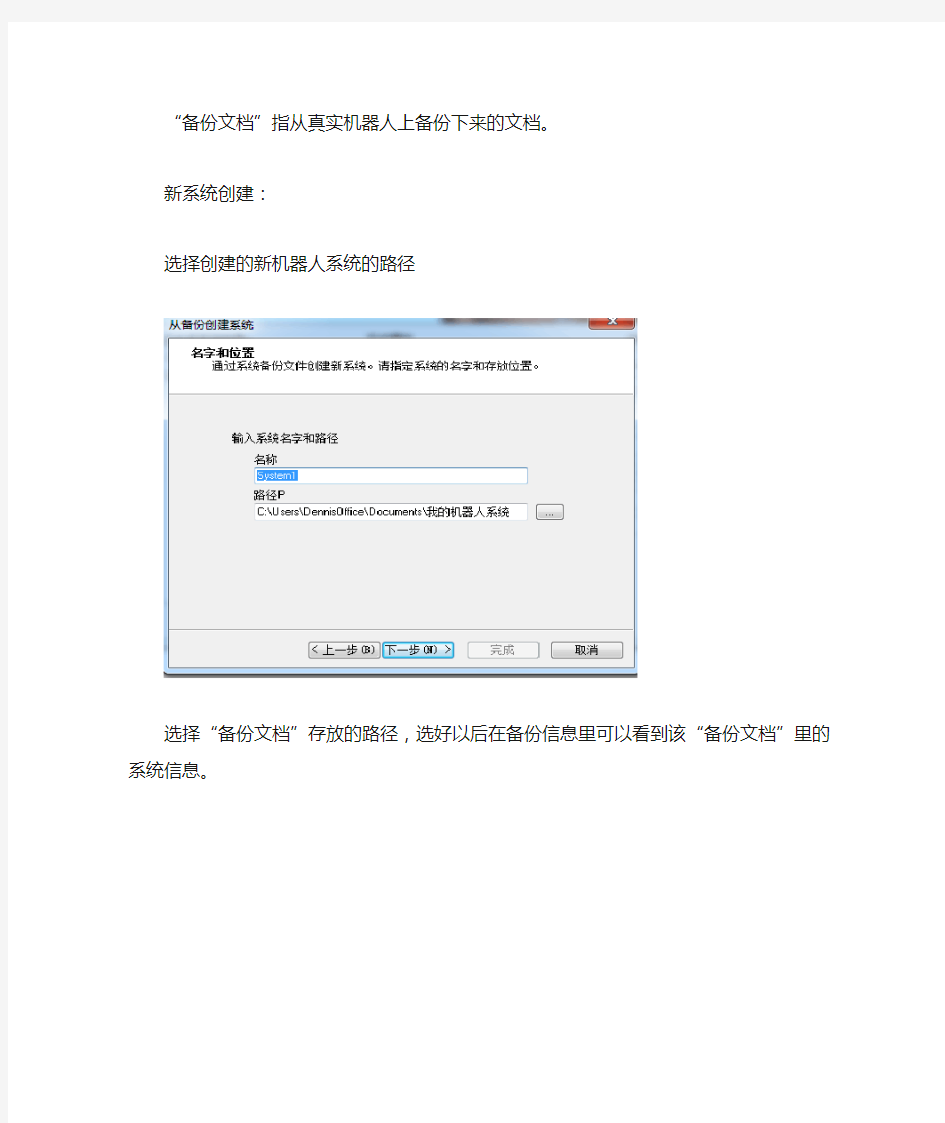
选择创建的新机器人系统的路径
选择“备份文档”存放的路径,选好以后在备份信息里可以看到该“备份文档”里的系统信息。
点击完成后,系统创建就完成了。
在选择机器人系统的目录,然后打开该新系统,就把目录选在刚才创建的路径。
点击打开机器人系统,但注意此时的机器人系统里是不带程序的。
由此可见软件仅仅从备份里提取出来了真实机器人的系统信息。
为了把“备份文档”的程序信息也导入进来,
我们需要把“备份文档”拷贝到
C:\Users\DennisOffice\Documents\RobotStudio\Systems\Backups这个路径目录下才会被软件所识别。
然后会提示错误,点击“是”,程序就导进虚拟机器人系统了。
新系统操作:
1.用“备份文档”创建一个新的机器人系统。
2.在RS中打开这个系统,注意在选添加目录时,只需要打开到母目录,不要把备份文件
也点开,否则会搜索不到创建的系统。;
3.备份恢复,把“备份文档”放到目录下,并将其恢复到虚拟的机器人系统中。
默认路径:C:\Users\DennisOffice\Documents\RobotStudio\Systems\Backups
4.在Rapid标签下点击备份标签,打开刚才位置的备份文件。
C:\Users\DennisOffice\Documents\RobotStudio\Systems\Backups\......
5.这样做以后,虚拟机器人里存储进了备份文档里Rapid程序,在Rapid标签下我们也可
以直接对程序进行修改。
修改后,回到“控制器”标签下,恢复一下修改过的程序。
重新启动后就可以用“Rapid”标签下的“检查程序”功能了。(该功能只针对虚拟机器人系统里程序,对Rapid标签的程序无效,所以我们每次都要Restore到虚拟机器人系统里!!!)
虚拟机器人操作:
Ctrl+鼠标
Ctrl+Shift+鼠标
项目一:焊接机器人 1.打开Robot studio软件,单击创建新建空工作站,同时保存一下,如下图所示; 2.选择ABB机器人模型IRB1600,单击添加,选择承重能力和到达距离,选择确定,如下图所示: 3.导入设备-tools-Binzel air 22,并拖动安装在机器人法兰盘上: 4.选择建模-固体-矩形体,设定长宽高,点击创建: 5.选择基本-机器人系统-从布局创建系统-下一步-下一步-完成; 6.控制器启动完成后,选择路径-创建一个空路径, 创建成功后,修改下方参数:moveJ , V1000,Z100 8.激活当前路径,选择机器人起点,单击示教指令 9.开启捕捉末端或角点,同时将机器人的移动模式设为手动线性,将机器人工具移到矩形体的一个角点上,单击示教指令,形成第一条路径,依次示教四个角点,形成路径,右击路径,选择查看机器人目标,可将机器人移动到当前位置 10.路径制作完成后,选择基本-同步到VC,在弹出的对话框中全部勾选,并点击确定,同步完成后选择仿真-仿真设定-将路径添加到主队列,选择应用--确定; 11.选择仿真录像,点击播放,开始仿真录像。 项目二:搬运机器人 1.新建空工作站--导入机器人IRB4600--选择最大承重能力,选择建模-固体-圆柱体,添加两个圆柱体,半径为200mm,高度分别为60mm和500mm,把其中一个作为工具添加到法兰盘上,同时导入两个设备Euro pallet如下图所示: 2.右击物体或在左侧布局窗口中右击物体名称,在下拉菜单中选择设定颜色来更改颜色: 3.根据布局创建机器人系统,细节与项目一相同,系统完全启动后,选择控制器-配置编辑器,在下拉菜单中选择I/O,在弹出窗口中新建Unit,细节如下图所示; 4.Unit新建完毕后,右击新建signal,新建do1和do2,细节如下图所示: 5.新建完毕后,重启控制器 6.重启完毕后,选择仿真-配置-事件管理器-添加事件,细节如下图所示: 7.事件添加完成后,开始创建路径啊,依次示教,机器人到达指定位置时,右击插入逻辑指令,如图所示: 8.路径创建完成后,同步到VC,仿真设定,然后进行仿真录像 项目三:叉车搬运 1.打开软件,新建空工作站,导入机器人模型IRB4600,选择最大承重能力,然后选择基本--导入几何体--浏览几何体--选择本地几何体--打开,如下图所示: 2.利用平移和旋转指令,将不同几何体按下图位置摆放整齐: 3.创建一个300*300*70的方体分别作为tool,将其创建为工具,具体操作如下图所示: 4.设定tool的本地原点为它的中心点,如下图所示: 5.选中tool,点击创建工具,将tool创建为工具,具体操作如下: 6.创建完成后将其安装在机器人法兰盘上,右击机器人选择显示机器人工作范围,可看到机器人最大到达距离,再次选择取消显示: 4.创建四个200*200*200的方体分别作为Box1~Box4,设定为不同颜色,将Box2~Box4设为不可见 5.布局结束,如下图所示:, 6.根据布局创建机器人系统,待系统启动完毕后,选择控制器--配置编辑器-新建Unit --新建signal,包括do1~do 15,如下图所示: 7.设置完成后,重启控制器,打开事件管理器,添加所需事件,包括显示对象,附加对象,提取对象,移动对象四类事件,具体如下:
“备份文档”指从真实机器人上备份下来的文档。 新系统创建: 选择创建的新机器人系统的路径 选择“备份文档”存放的路径,选好以后在备份信息里可以看到该“备份文档”里的系统信息。
点击完成后,系统创建就完成了。 在选择机器人系统的目录,然后打开该新系统,就把目录选在刚才创建的路径。
点击打开机器人系统,但注意此时的机器人系统里是不带程序的。 由此可见软件仅仅从备份里提取出来了真实机器人的系统信息。 为了把“备份文档”的程序信息也导入进来, 我们需要把“备份文档”拷贝到 C:\Users\DennisOffice\Documents\RobotStudio\Systems\Backups这个路径目录下才会被软件所识别。 然后会提示错误,点击“是”,程序就导进虚拟机器人系统了。
新系统操作: 1.用“备份文档”创建一个新的机器人系统。 2.在RS中打开这个系统,注意在选添加目录时,只需要打开到母目录,不要把备份文件 也点开,否则会搜索不到创建的系统。; 3.备份恢复,把“备份文档”放到目录下,并将其恢复到虚拟的机器人系统中。 默认路径:C:\Users\DennisOffice\Documents\RobotStudio\Systems\Backups 4.在Rapid标签下点击备份标签,打开刚才位置的备份文件。 C:\Users\DennisOffice\Documents\RobotStudio\Systems\Backups\......
5.这样做以后,虚拟机器人里存储进了备份文档里Rapid程序,在Rapid标签下我们也可 以直接对程序进行修改。 修改后,回到“控制器”标签下,恢复一下修改过的程序。 重新启动后就可以用“Rapid”标签下的“检查程序”功能了。(该功能只针对虚拟机器人系统里程序,对Rapid标签的程序无效,所以我们每次都要Restore到虚拟机器人系统里!!!) 虚拟机器人操作: Ctrl+鼠标 Ctrl+Shift+鼠标
生产线时,不需要现场调试和编程。现在我们可以 在开始生产前,通过 RobotStudio 模拟和调试生产过程,优化编程路径并缩短循环时间。这改变了我们的工作流程并提高了生产效率。从而减少了 生产时间,特别是在引进新产品时。 使用 RobotStudio 可及时引进新产品。 将新产品投放市场,时间至关重要,特别是富士康及其客户所在的制造领域的高度竞争性。袁小云先生负责调查和研究富士康网络系统集团的自动化技术应用情况: “富士康是一家产品制造商。我们的管理战略是:时间就是市场,时间就是产量,时间就是金钱。使用 RobotStudio,我们可以限制评估时间并缩短开发时间。这有助于我们实现战略目标并让我们的客户满意。”我们在深圳富士康工厂见到袁先生时,他这样解释道。 四年之前的 2000 年,富士康就开始使用 ABB 机器人了。 现在的深圳工厂约有 110 台 ABB 机器人。最初,所有机器人都是联机编程的,这意味着大量工作需要重新配置以进行编程。富士康看到了采用脱机编程提高生产效率的潜能。 “由于引进了 RobotStudio,我们在将新产品引入 时间就是市场,时间就是产量,时间就是金钱 帮助富士康缩短了产品上市时间,这在中国市场是一个至关重要的因素。
? 版权所有 A B B A u t o m a t i o n T e c h n o l o g y P r o d u c t s A B .2004 年 7 月。P R 10272C N _R 1 富士康深圳工厂中的压弯组件。 培训和生产同时进行 RobotStudio 也可用于教育和培训。富士康发现 RobotStudio 的界面非常友好并且易于使用:“在采用 RobotStudio 之前,我们很难做到培训与生产并重。现在,我们可以保持正常的生产运行速度,同时使用 RobotStudio 来教育和培训我们的员工。”袁小云先生解释道。 简化工作 “将来,我们希望加大 RobotStudio 的利用度。计划是模拟多个机器人共同操作,以处理折叠和焊接之类的工作。对于富士康各种不同的应用场合,RobotStudio 将是一种理想的编程工具。”袁小云先生表示。俊男深有同感“我们需要 RobotStudio 来开发新的机器人程序,特别是焊接和折叠机器人。我们希望能够用上新的 RobotStudio 版本和 PowerPacs。RobotStudio 使我们的工作更容易!” 这对企业的生存和发展非常关键,”袁小云先生举例表示: 我们的一位客户需要在非常短的时间内批量生产一种产品。其要求让我们肩负巨大压力。使用 RobotStudio,我们大大缩短了编程时间,实现了客户的生产目标,使他非常及时地推出了这批产品。” 部门主管俊男 (Jun Nan) 以莫大的兴趣继续开发 RobotStudio。 相互理解 俊男是富士康网络工程部的部门主管,负责技术开 发。 “使用 RobotStudio,我们可以在办公室轻易地模拟现场生产过程。无需花巨资于昂贵的设备,我们可以明确让客户和主管了解开发和组织生产过程的情况。基本上,所有客户都是现场工厂用户。在获得 RobotStudio 所呈交的解决方案后,客户可以直接选择他们中意的解决方案,而无需凭空设想我们的意见。他们只需从我们提供的设计图中选择需要的程序。 完美的调试助手 富士康采用 RobotStudio 来进行效率评估。通过将 新设备的三维模型导入 RobotStudio,可以将风险降至最低,因为从一开始就可以评估并找到合适的设备,从而避免了因设备采购错误而出现的问题。所以,RobotStudio 有助于保障投资。由于缩短了调试时间并降低了在调试期间损坏机器的机率,富士康的维护成本亦大大降低。 “RobotStudio 的调试助手功能非常强大,并且调试效果优于人工调试。这也让我们改进了产品质量。”袁小云表示。 RobotStudio Case Study: https://www.doczj.com/doc/4a18208696.html,/roboticssoftware T M 个案研究:富士康