第八章 弹性体振动
§8-1 概述
任何机器的零部件都是由质量和刚度连续分布的物体所组成,也就是说这些零部件都是弹性体。但是在很多情况下,为了使问题简化,计算简便,常常将它们简化成多自由度的离散系统来分析。然而,在有些工程实践中,却要求对弹性体振动作严密的分析,这时就不能对它进行离散化处理。因此对工程上常用的连续弹性体(如杆、轴、梁、板、壳,以及它们的组合系统)进行振动分析求出它们的固有频率和主振型,计算他们的动力响应,这在实用上和理论研究上都有非常重要的意义。
多自由度系统(离散系统)和弹性体(连续系统)是对同一个客观事物(机器零部件)的不同的分析方法,因此它们之间必然存在一定的联系和明显的区别。
x
x
)
a )
b ((
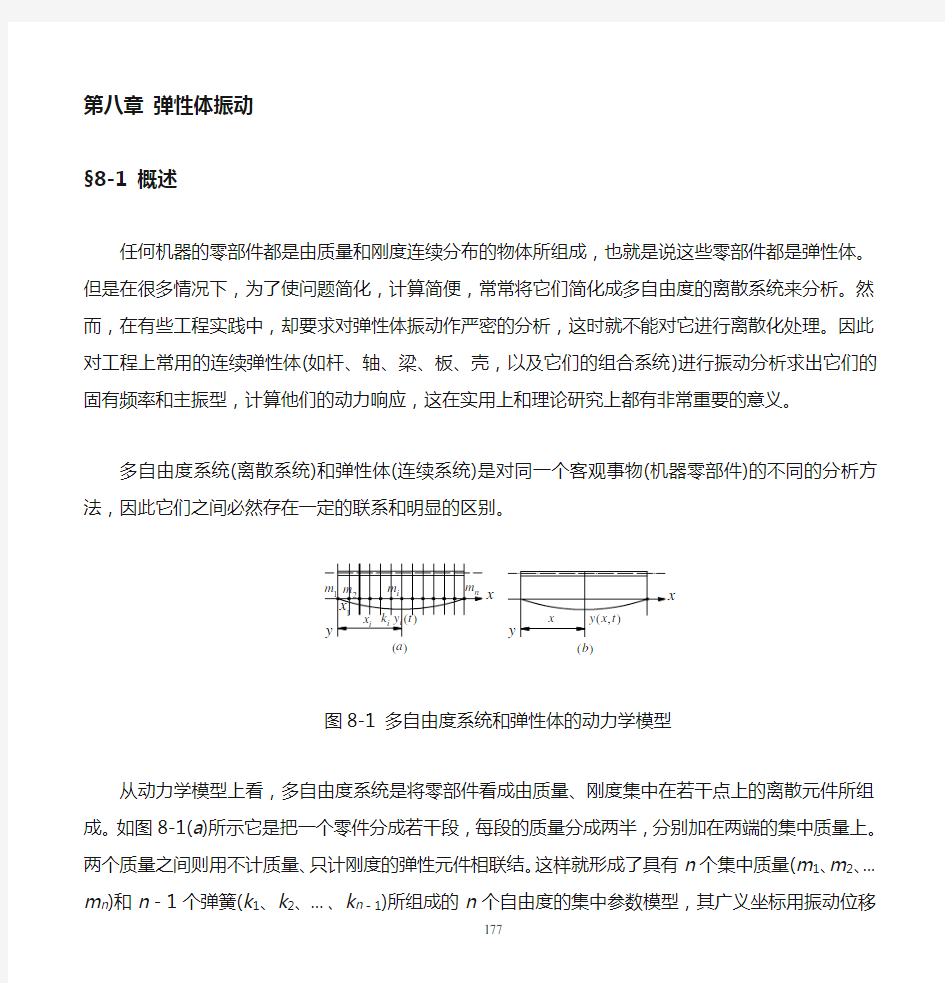
图8-1 多自由度系统和弹性体的动力学模型
从动力学模型上看,多自由度系统是将零部件看成由质量、刚度集中在若干点上的离散元件所组成。如图8-1(a )所示它是把一个零件分成若干段,每段的质量分成两半,分别加在两端的集中质量上。两个质量之间则用不计质量、只计刚度的弹性元件相联结。这样就形成了具有n 个集中质量(m 1、m 2、…m n )和n -1个弹簧(k 1、k 2、…、k n -1)所组成的n 个自由度的集中参数模型,其广义坐标用振动位移y i (t)表示。弹性体则将零部件看成由质量、刚度连续分布的物体所组成如图8-1(b )所示。当一个零件的分段数n →∞时,离散系统就变成连续系统,其横坐标x 也从一个离散值(x 1、x 2、…x n )变为连续函数。因此系统的广义坐标要用一个由截面位置x 和时间t 所表达的二元函数y (x ,t )来表示。这就是说,弹性体有无穷多个广义坐标,而且它们之间有一定的相互关系。
从运动方程来看,多自由度系统用一个方程数与自由度相等的常系数线性微分方程组来描述;而弹性体则要用偏微分方程式来描述,其阶数决定于所研究的对象和振动形态。
从振动特性来看,多自由系统振动特性的推广即为弹性体的振动特性;而弹性体振动特性的近似即为多自由度系统的振动特性。
在本章中,我们只研究弹性体的最简单情况,即等截面的杆、轴的振动,而且假设弹性体的质量和刚度均匀分布,在振动过程中弹性体不产生裂纹,即要求广义坐标的变化是连续的。此外,我们的讨论只局限在线性范围内,即认为弹性体的应力应变关系服从虎克定律,而且是均质各向同性的。
§8-2 杆的纵向振动
8.2.1运动方程
假设有一根均质等截面的棱柱形杆,杆长为l ,截面积为A ,质量密度为ρ,拉压弹性模量为E 。取杆件中心线为x 轴,原点取在杆的左端面(见图8-2a)。假设在振动过程中杆的横截面只有x 方向的位移,而且每一截面都始终保持平面并垂直于x 轴线。当杆件处于平衡状态,杆上各截面的位置用它们的x 坐标来表示。当杆件振动时,x 截面的纵向位移则用广义坐标来u 表示。显然对应于一个x 就有一个u ,而不同时间内每个u 也在变化,因此u 是x 和t 两个变量的函数。
u =u (x ,t
)
)
a )
b o
S
dx x
S S ??+
2
2t
u Adx ??ρA
图8-2 棱柱形杆的纵向振动
现在,我们在x 截面处取杆件上一个微小的单元体来研究(见图8-2b),分析其受力状态。
设x 截面的振动位移为u ,则在x +dx 截面处的振动位移就应该是dx x
u
u ??+。又设x 截面上的拉压内力为S ,则x +dx 截面上的拉压内力应为dx x
S
S ??+。这一微元段所产生的惯性力是2
2t u Adx
??ρ。根据达伦培尔原理可以得出以下关系式:
0)(22=??--??+t
u Adx S dx x S S ρ (8-1)
根据虎克定律:εσE =。
其中微元段的轴向应变量ε为:
x
u dx u
dx x u
u ??=-??+
=
)(ε
故用微元段的轴向应力σ来表示其轴向拉压内力S 时,可得:
x
u
EA
AE A S ??===εσ (8-2) 将(8-2)式代入(8-1)式得:
02
22
2=??-??t u A
dx x u EA ρ
即
2
22
2t u
E x u ??=
??ρ
或
2
22
2
21t
u a
x
u ??=
?? (8-3)
式中:
ρ
E
a =
(8-4)
(8-3)式即为等截面杆纵向自由振动的运动方程,它是一个二阶齐次偏微分方程式,也 就是偏微分方程理论中著名的两阶波动方程。式中a 可以证明是声波在杆件中沿x 轴的传播速度,对一定的杆来说,a 是个常数。
8.2.2固有频率和主振型
如前所述,通过求解系统自由振动的运动方程,可以求出系统的固有频率和主振型。现在要求杆件纵向振动的固有频率和主振型,就要求解(8-3)式所示的偏微分方程式。
我们现在不用偏微分方程的理论来求(8-3)式的解,而是根据对多自由度振动系统的了解,仍然用待定系数法来寻找它的简谐振动的特解.如前所述,多自由度系统自由振动的解为,
{}{}t i n
e A x ω=
当自由度数n →∞时,上式中的振动位移的列矢量{}x 就变成截面位置坐标x 和时间t 两个变量的连续函数u (x , t )。上式中的振幅列矢量(即主振型){}A 也就变成了连续函数U (x ),因为在弹性体振动过程中,对应于每一个截面位置坐标x 就有一个振幅U ,但由于弹性体截面有无穷多个,所以U 也有无穷多个,故不能象多自由度系统那样用n 个振幅组成的列矢量来表示,而只能用一个未知函数U (x )来表示。显然U (x )表示了杆件纵向振动的振型,故称其为振型函数。此外,还应有一个时间函数由Φ(t ),它表示杆件的振动方式。
通过以上分析,我们可以推断出杆件纵向振动的解应具有以下形式:
)()(),(t x U t x u Φ= (8-5)
将上式分别对x 和t 求二阶偏导:
2222)()(dx x U d t x u Φ=?? 2
22
2)()
(dt t d x U t u Φ=??
将以上两式代入(8-3)得:
2
22
2
2)()
(1)()
(dt
t d x U a
dx
x U d t Φ=
Φ
应用分离变量法,则上列偏微分方程的形式可以改变为:
2
2222)
()(1)()(dt t d t dx x U d x U a ΦΦ= (8-6)
上式左边仅是坐标x 的函数,右边仅是时间t 的函数,因此它们必须等于同一个常数
上式方能成立。若假设这一常数为2
n ω-(因为只有把常数设为负值,才可能得到满足边界
条件的非零解),则(8-6)式就变成下列两个常微分方程式:
0)()(2
22=Φ+Φt dt t d n ω (8-7)
0)()
(2
2
2
2=+
x U a
dx
x U d n
ω (8-8)
显然,(8-7)、(8-8)式的解分别为:
t B t A t n n ωωsin cos )(11+=Φ (8-9)
a
x
D a
x
C x U n n ωωsin
cos
)(11+= (8-10)
式中,n ω即为杆件纵向自由振动的频率,也就是杆件的固有频率。U (x )则是杆件纵向自由振动的振型函数,即主振型。
将(8-9)、(8-10)式代回(8-5)式,即可得杆件纵向自由振动的解:
)sin cos )(sin
cos
(),(1111t B t A a x
D a
x
C t x u n n n n ωωωω++= )sin()sin
cos (11?ωωω++=t a
x
D a
x
C A n n n
)sin()sin
cos
(?ωωω++=t a
x
D a x C n n n (8-11)
式中C 、D 、n ω、?为四个待定常数,要由杆件的两个边界条件和振动时的两个初始
条件来决定。现以杆件两端是由自由端的情况为例来说明求固有频率及主振型的方法。
由于自由端上应力σ为零,故应变ε也为零。因此自由端的边界条件可写成:
00
=??=x x
u ,
0=??=l
x x
u
将以上两个边界条件分别代入(8-11)式得:
0)sin(0
=+=??=?ωωt a
D x
u
n n x (8-12)
0)sin()sin
cos
(=+-=??=?ωωωωωt a
l
a
C
a
l
a
D
x
u
n n n
n n
l
x (8-13)
因为对于任何t 值,以上两式都必须成立,所以0)sin(
≠+?ωt n 。因此,以(8-12)式得到D =0。这时,不能再令C =0,否则就得到u (x ,t )=0的非振动解。从(8-13)式可以看出,
要使u (x ,t )有非零解,就必须有:
0sin =a
l
n ω (8-14)
上式就是杆件纵向振动的频率方程,由此可以求得无限多阶固有频率。因为由(8-14)式可得:
πωi a
l
n = 故杆件的固有频率为:
),,3,2,1(∞???===
i E
l
i l ia ni ρ
π
πω (8-15)
对应于上述无限多阶固有频率,就有无限多阶主振型:
l
x
i C x U i i πcos
)(= (8-16) 令i =1、2、3分别代入(8-15)与(8-16)式,即可求得具有自由端的杆件纵向振动时的前三阶固有频率和相应的主振型。
第一阶固有频率和主振型为:
ρ
π
ωE
l
n =
1,l
x
C x U πcos
)(11=
第二、三阶固有频率和主振型为:
ρ
πωE
l n 22=
,l
x
C x U π2cos
)(22= ρ
πωE
l
n 33=
,l
x
C x U π3cos
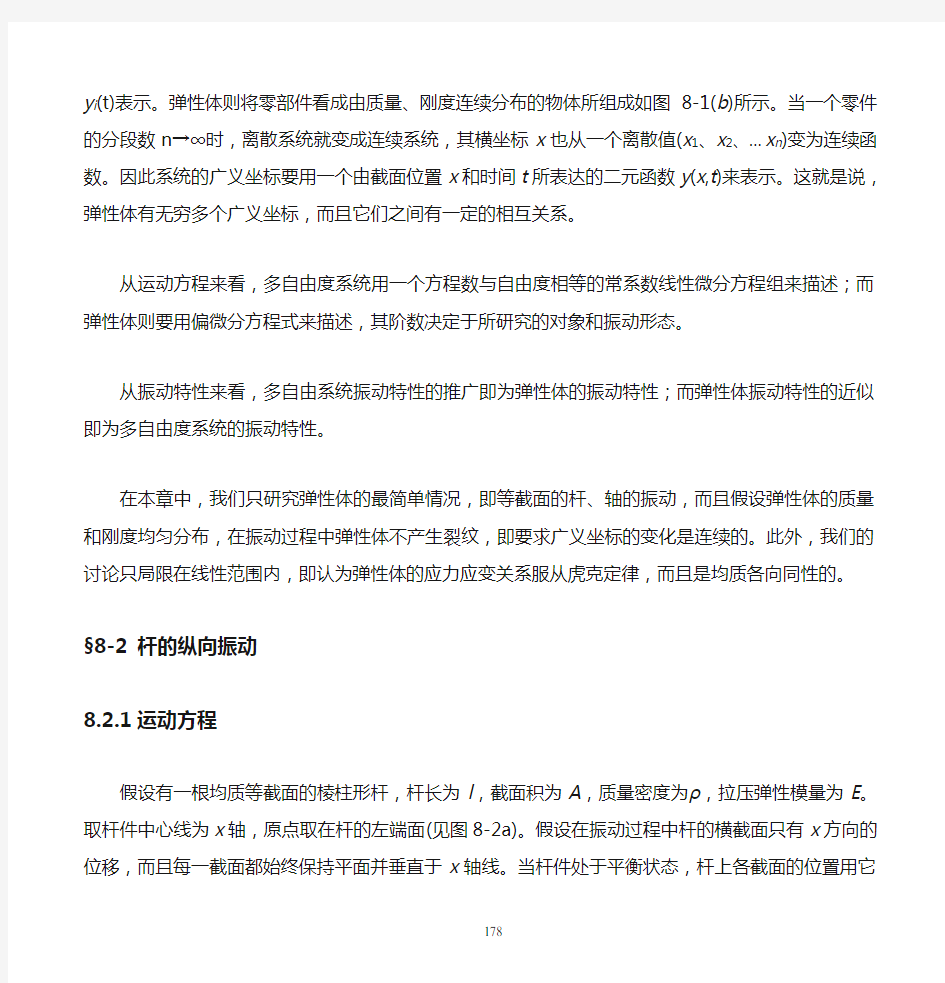
)(31= 这三阶主振型表示在图8-3之中,可以看出,随着频率阶数的升高,节点数也在增加。
)
a 0
l
2
l 2
l c
1
c
1
-0
l
2
l 2
2
c c
c
2
4
l 43l )
b 2--)
c 0
l
2
l 2
l c
3
c
3
c
3
c
3
6
l 3l 3
l 56l
图8-3 杆件纵向振动的主振型
§8-3 轴的扭转振动
8.3.1运动方程
设有一根均质等截面面轴,长度为l ,半径为r ,质量密度为ρ,剪切弹性模量为G ,
截面的极惯性矩为J p 。取轴线为x 轴,原点取在轴的左端面(见图8-4)。
2
2t
dx J p ??θρdx x
T ??+
T
图8-4 圆轴的扭转振动
在轴的x 截面处截取微元段dx ,并取x 截面相对平衡位置的转角θ为广义坐标,则在x +dx 截面上的角位移应为dx x
??+
θ
θ。故微元段两端截面的相对扭转角θd 为: dx x
dx x d ??=-??+
=θθθθθ)( 因此微元段上的角应变量x
dx d ??=
=θθεθ。 故x 截面上的内扭矩T 为:
x
GJ T p
??=θ 单位长度上扭矩的变化量为:
22x
GJ x T p ??=??θ 所以x +dx 截面上的内扭矩为:
22x
GJ T dx x T T p ??+=??+θ 圆柱形微元段的极转动惯量I p 为:
dx J I p p ρ=
根据转动方程式可得:
T dx x
GJ T t
dx
J p
p -??+=??)(2
22
2θθρ
即
2
22
2x G
t ??=??θθρ
(8-17)
令
ρ
G
b =
则(8-17)式可改写成:
2
222
21t u b x u ??=
?? (8-18)
上式就是等截面圆轴扭转自由振动的运动方程。它也是一个二阶波动方程。式中,b 是扭转波的传播速度,也是一个常数。
8.3.2固有频率和主振型
比较(8-18)式与(8-3)式可以看出,轴的扭转振动运动方程与杆的纵向振动运动方程的形式完全相同。因此可以按照(8-11)式的形式直接写出(8-18)式的解:
)sin()sin
cos
(),(?ωωωθ++=t b
x
B b x
A t x n n n (8-19)
式中A 、B 、n ω、?四个待定常数同样决定于轴的边界条件及其振动的初始条件。为
了求出轴的扭转振动的固有频率和主振型,也必须给出轴的边界条件。
现在我们以图5-31所示的一端固定,一端带有一个圆盘的圆轴为例来说明计算轴系扭转的固有频率和主振型的方法。设轴长为l ,并取轴线为Z 轴,圆盘对于轴线的转动惯量为Z I 。
这个系统的边界条件是,在固定端转角等于零,带圆盘这一端则要求轴受到的扭矩M 等于转子的惯性力矩。上述边界条件可用数学式表达如下:
00
==x θ
(8-20)
l
x Z l x p t
I x GJ ==??-=??)
()(22θθ (8-21)
将(8-20)式代入(8-19)式可得:
A =0
将上式代入(8-21)式得:
b
l
B I b
l
b
B
GJ n n n n
p ωωωωsin
cos
2
z =
即
n
Z p n b G
I J b
l
tg
ωω=
(8-22)
若设圆轴对轴线的转动惯量为θI ,则有:
p p J b Gl lJ I 2
=
=ρθ (8-23)
将(8-23)式代入(8-22)式得:
l
b
I I b
l
tg
n Z n ωωθ=
(8-24) (8-24)式即图5-21所示系统的频率方程。直接求解这一方程很不方便,一般可用作图法求解。即令
?ω=b
l
n (8-25)
图8-5 用图解法求系统的固有频率
??
?
??==??θ121z I I y tg y 则从这两条曲线的交点i ?即可求出系统的第i 阶固有频率ni ω。
i ni l
b ?ω= (8-26)
根据正切函数的性质,我们可以在横坐标上每相隔一个π值就可以作出一条?
tg y =1的曲线。因此可以得到曲线y 1与y 2的许多交点1?、2?、…,所以即求出系统的各阶固有频率。
对应于各阶固有频率ni ω就可以求出系统的各阶主振型:
b
x
B ni i i ωsin
=Θ (i =1,2,3,…∞) (8-27)
第4章 振动与波动题目无答案 一、选择题 1. 已知四个质点在x 轴上运动, 某时刻质点位移x 与其所受合外力F 的关系分别由下列四式表示(式中a 、b 为正常数).其中不能使质点作简谐振动的力是 [ ] (A) abx F = (B) abx F -= (C) b ax F +-= (D) a bx F /-= 2. 在下列所述的各种物体运动中, 可视为简谐振动的是 [ ] (A) 将木块投入水中, 完全浸没并潜入一定深度, 然后释放 (B) 将弹簧振子置于光滑斜面上, 让其振动 (C) 从光滑的半圆弧槽的边缘释放一个小滑块 (D) 拍皮球时球的运动 3. 欲使弹簧振子系统的振动是简谐振动, 下列条件中不满足简谐振动条件的是 [ ] (A) 摩擦阻力及其它阻力略去不计 (B) 弹簧本身的质量略去不计 (C) 振子的质量略去不计 (D) 弹簧的形变在弹性限度内 4. 当用正弦函数或余弦函数形式表示同一个简谐振动时, 振动方程中不同的量是 [ ] (A) 振幅 (B) 角频率 (C) 初相位 (D) 振幅、圆频率和初相位 5. 如T4-1-5图所示,一弹簧振子周期为T .现将弹簧截去一半, 仍挂上原来的物体, 则新的弹簧振子周期为 [ ] (A) T (B) 2T (C) 3T (D) 0.7T 6. 三只相同的弹簧(质量忽略不计)都一端固定, 另一端连接 质量为m 的物体, 但放置情况不同.如T4-1-6图所示,其中一个平放, 一个斜放, 另一个竖直放.如果让它们振动起来, 则三 者的 [ ] (A) 周期和平衡位置都不相 同 (B) 周期和平衡位置都相同 (C) 周期相同, 平衡位置不同 (D) 周期不同, 平衡位置相同 7. 如T4-1-7图所示,升降机中有一个做谐振动的单摆, 当升降 机静止时, 其振动周期为2秒; 当升降机以加速度上升时, 升降机中 的观察者观察到其单摆的振动周期与原来的振动周期相比,将 T 4-1-6图 T 4-1-5图
第四章振动光谱 一、教学目的 理解掌握震动光谱分析的基本理论,掌握红外光谱图的分析处理,了解红外光谱实验技术。 二、重点、难点 重点:震动光谱分析的基本理论,红外光谱图的分析处理。 难点:震动光谱分析的基本理论。 三、教学手段 多媒体教学 四、学时分配 4学时 引言: ●1900~1910年间,科布伦茨(W.W.C。blentz)首先用红外光测量了一些有 机物液体的吸收光谱而建立起一种新的分析方法——红外光谱法。他发现分子中的一定原子群可以吸收特定的频率,这些特定的频率犹如人类的指纹,可以用来辨认分子中特定原子群的存在。 ●它主要可以用作分子结构的基础研究和物质化学组成(物相)的分析(包括定性和 定量)。红外光谱法作分子结构的研究可以测定分子的键长、键角大小,并推断分子的立体构型,或根据所得的力常数,间接得知化学键的强弱,也可以从正则振动频率来计算热力学函数等。 ●不过红外光谱法更多的用途是根据谱的吸收频率的位置和形状来判定本知物,并按 其吸收的强度来测定它们的含量。因此红外光谱法在目前已成为十分方便而有效的分析方法之一。 ●红外光谱法应用得较多的是在有机化学领域,对无机化合物和矿物的红外鉴定开始 较晚。红外光谱法对测定矿物的结构或组分虽不如X射线衍射分析那么成熟,却也有其独特长处。 所谓振动光谱是指物质因受光的作用,引起分子或原子基团的振动,从而产生对光的吸收。如果将透过物质的光辐射用单色器加以色散,使波长授长短依次排列,同时测量在不同波长处的辐射强度,得到的是吸收光谱。如果用的光源是红外光波,即0.78~1000μm,就是红外吸收光谱。如果用的是强单色光,例如激光,产生的是激光拉曼光谱。本章主要介绍红外光谱的原理及其在无机非金属材料中的应用,对拉曼光谱只作简单的介绍。
结构化学试卷 班级姓名分数 一、选择题( 共11题15分) 1. 2 分(3251) 3251 下列哪一种说法是正确的?------------------------------------------------ ( ) (A) 略去离心变形,任何分子的转动谱项均可表示为BJ(J+1) (B) 根据非极性双原子分子的转动跃迁选律, J=0说明该分子的转动能级不能改 变 (C) 一双原子分子给定电子组态的振动能级是不等间隔的 2. 2 分(3239) 3239 运用刚性转子模型处理异核双原子分子纯转动光谱,一般需知几条谱线的ν~(J),就可计算其核间距? (A) 1 (B) 2 (C) 3 (D) 4 3. 2 分(3182) 3182 红外光谱中的指纹区源于:---------------------------- ( ) (A) 分子中特征基团的振动 (B) 分子骨架振动 (C) 分子的所有简正振动 (D) 分子的转动 4. 2 分(3125) 3125 下列分子的UPS 与N2的UPS 十分相似的是:------------ ( ) (A) O2(B) (C) H2(D) CO 5. 1 分(3169) 3169 对于C-Cl 键振动光谱特征频率最大的是:---------------------------- ( ) 6. 1 分(3170) 3170 由下述实验方法可验证分子轨道能级顺序的是:---------------------------- ( ) (A) 红外光谱(B) 核磁共振(C) 质谱(D) 光电子能谱 7. 1 分(3167) 3167 下列分子转动光谱中出现谱线波长最长的是:---------------------------- ( )
第八章 振动 8-1 解:取固定坐标xOy ,坐标原点O 在水面上(图题所示) 设货轮静止不动时,货轮上的A 点恰在水面上,则浮力为S ρga .这时 ga s Mg ρ= 往下沉一点时, 合力 )(y a g s Mg F +-=ρ gy s ρ-=. 又 2 2 d d t y M Ma F == 故0d d 22 =+gy s t y M ρ 02 2=+y M g s dt dy ρ 故作简谐振动 M g s ρω= 2 )(35.68 .910102101022223 33 4s g s M T =?????===πρπωπ 8-2 解:取物体A 为研究对象,建立坐标Ox 轴沿斜面向下,原点取在平衡位置处,即在初始位置斜下方距离l 0处,此时: )(1.0sin 0m k mg l == θ (1) (1) A 物体共受三力;重mg, 支持力N, 张力T.不计滑轮质量时,有 T =kx 列出A 在任一位置x 处的牛顿方程式 220d d )(sin sin t x m x l k mg T mg =+-=-θθ 将(1)式代入上式,整理后得 0d d 2 2=+x m k t x 故物体A 的运动是简谐振动,且)rad/s (7== m k ω 习题8-1图
由初始条件,000?? ?=-=v l x 求得,1.00???===π ?m l A 故物体A 的运动方程为 x =0.1cos(7t+π)m (2) 当考虑滑轮质量时,两段绳子中张力数值不等,如图所示,分别为T 1、T 2,则对A 列出任一位置x 处的牛顿方程式为: 221d d sin t x m T mg =-θ (2) 对 滑 轮 列 出 转 动 方 程为: 22 221d d 2 1 21t x Mr r a Mr J r T r T =??? ??==-β (3) 式中,T 2=k (l 0+x ) (4) 由式(3)、(4)知2 201d d 21)(t x M x l k T ++=代入(2)式知 22 021)(sin dt x d m M x l k mg ??? ??+=+-θ 又由(1)式知0sin kl mg =θ 故0d d )21(22=++kx t x m M 即0)2 (d d 22=++ x m M k t x m M k += 2 2 ω 可见,物体A 仍作简谐振动,此时圆频率为:rad/s)(7.52 =+= m M k ω 由于初始条件:0,000=-=v l x 可知,A 、?不变,故物体A 的运动方程为: m t x )7.5cos(1.0π+= 由以上可知:弹簧在斜面上的运动,仍为简谐振动,但平衡位置发生了变化,滑轮的质量改变了系统的振动频率 . 习题8-2图
旋转机械振动与故障诊断研究综述 丄、八 1.前言 工业生产离不开回转机械,随着装置规模不断扩大,越来越多的高速回转机械应用于工业生产,诸如高速离心压缩机、汽轮机发电机组。动态失稳造成的重大恶性事故屡见不鲜。急剧上升的振动可在几十秒之内造成机组解体, 甚至祸及厂房,造成巨大的经济损失和人员伤亡。此外,机械振动可能降低设备机械性能,加速机械零部件的磨损,发出的噪声损害操作者的健康。但是振动也能合理运用,如工业上常用的振动筛、振动破碎等都是振动的有效利用。工程技术人员必须认真对待机械振动问题,当机组产生有害的振动时,及时分析原因,坚持用合理的振动测试标准,采取科学的防治措施。 2.旋转机械振动标准 旋转机械分类: I类:为固定的小机器或固定在整机上的小电机,功率小于15KW U类:为没有专用基础的中型机器,功率为15~75KW刚性安装在专用基础上功率小于300KW的机器。 川类:为刚性或重型基础上的大型旋转机械,如透平发电机组。 W类:为轻型结构基础上的大型旋转机械,如透平发电机组。 机械振动评价等级: 好:振动在良好限值以下,认为振动状态良好。 满意:振动在良好限值和报警值之间,认为机组振动状态是可接受的(合格),可长期运行。 不满意:振动在报警限值和停机限值之间,机组可短期运行,但必须加强监测并采 取措施。 不允许:振动超过停机限值,应立即停机。 3.振动产生的原因 旋转机械振动的产生主要有以下四个方面原因,转子不平衡,共振,转子不对中和
机械故障。 4.旋转机械振动故障诊断 4.1 转子不平衡振动的故障特征 当发生不平衡振动时,其故障特征主要表现在如下方面: 1 )不平衡故障主要引起转子或轴承径向振动,在转子径向测点上得到的频谱图, 转速频率成分具有突出的峰值。 2 )单纯的不平衡振动,转速频率的高次谐波幅值很低,因此在时域上的波形是一个正弦波。 3 )转子振幅对转速变化很敏感,转速下降,振幅将明显下降。 4 )转子的轴心轨迹基本上为一个圆或椭圆,这意味着置于转轴同一截面上相互垂直的两个探头,其信号相位差接近90°。 4.2 旋转机械振动模糊诊断 4.2.1 振动模糊诊断基本原理 振动反映了系统状态及变化规律的主要信息,统计资料表明:机械设备的故障有67 % 左右是由于振动引起的,并且能从振动和振动辐射出的噪声反映出来。回转机械的振动信息尤其明显,且振动诊断具有快速、简便、准确和在线诊断等一系列优点,所以振动诊断法是旋转机械状态识别和故障诊断的最有效、最常用的方法。 但是,由于机械系统本身的复杂性以及所摄取的振动信号强烈的模糊性,使故障之间没有清晰的界限,这时利用传统的振动频谱分析,对一个故障可能有多个征兆来表现,一个征兆也可能有多个故障原因的复杂现象,往往难定两者的对应关系进行指导维修。振动模糊法,将模糊数学与振动诊断相结合,利用模糊综合评判技术,较好地处理了回转机械故障的不确定性问题。 4.2.2 旋转机械振动模糊诊断法的实现 隶属函数的确定
第八章 振动与波动 本章提要 1. 简谐振动 · 物体在一定位置附近所作的周期性往复运动称为机械振动。 · 简谐振动运动方程 ()cos x A t ω?=+ 其中A 为振幅,ω 为角频率,(ωt+?)称为谐振动的相位,t =0时的相位? 称为初相位。 · 简谐振动速度方程 d ()d sin x v A t t ωω?= =-+ · 简谐振动加速度方程 222d ()d cos x a A t t ωω?==-+ · 简谐振动可用旋转矢量法表示。 2. 简谐振动的能量 · 若弹簧振子劲度系数为k ,振动物体质量为m ,在某一时刻m 的位移为x ,振动速度为v ,则振动物体m 动能为 212 k E mv = · 弹簧的势能为 212 p E kx = · 振子总能量为 P 22222211 ()+()221=2sin cos k E E E m A t kA t kA ωω?ω?=+= ++ 3. 阻尼振动
· 如果一个振动质点,除了受弹性力之外,还受到一个与速度成正比的阻尼作用,那么它将作振幅逐渐衰减的振动,也就是阻尼振动。 · 阻尼振动的动力学方程为 22 2d d 20d d x x x t t βω++= 其中,γ是阻尼系数,2m γ β= 。 (1) 当22ωβ>时,振子的运动一个振幅随时间衰减的振动,称阻尼振动。 (2) 当22ωβ=时,不再出现振荡,称临界阻尼。 (3) 当22ωβ<时,不出现振荡,称过阻尼。 4. 受迫振动 · 振子在周期性外力作用下发生的振动叫受迫振动,周期性外力称驱动力 · 受迫振动的运动方程为 22 P 2d d 2d d cos x x F x t t t m βωω++= 其中,2k m ω=,为振动系统的固有频率;2C m β=;F 为驱动力振幅。 · 当驱动力振动的频率p ω等于ω时,振幅出现最大值,称为共振。 5. 简谐振动的合成与分解 (1) 一维同频率的简谐振动的合成 若任一时刻t 两个振动的位移分别为 111()cos x A t ω?=+ 222()cos x A t ω?=+ 合振动方程可表示为 ()cos x A t ω?=+ 其中,A 和? 分别为合振动的振幅与初相位 221112212()cos A A A A A ??=++-
第八章 振动与波动 本章提要 1. 简谐振动 · 物体在一定位置附近所作的周期性往复运动称为机械振动。 · 简谐振动运动方程 ()cos x A t ω?=+ 其中A 为振幅,ω 为角频率,(ωt+?)称为谐振动的相位,t =0时的相位? 称为初相位。 · 简谐振动速度方程 d ()d sin x v A t t ωω?= =-+ · 简谐振动加速度方程 222d ()d cos x a A t t ωω?==-+ · 简谐振动可用旋转矢量法表示。 2. 简谐振动的能量 · 若弹簧振子劲度系数为k ,振动物体质量为m ,在某一时刻m 的位移为x ,振动速度为v ,则振动物体m 动能为 212 k E mv = · 弹簧的势能为 212 p E kx = · 振子总能量为 P 22222211 ()+()221=2sin cos k E E E m A t kA t kA ωω?ω?=+= ++ 3. 阻尼振动 · 如果一个振动质点,除了受弹性力之外,还受到一个与速度成正比的阻
尼作用,那么它将作振幅逐渐衰减的振动,也就是阻尼振动。 · 阻尼振动的动力学方程为 222d d 20d d x x x t t βω++= 其中,γ是阻尼系数,2m γ β= 。 (1) 当22ωβ>时,振子的运动一个振幅随时间衰减的振动,称阻尼振动。 (2) 当22ωβ=时,不再出现振荡,称临界阻尼。 (3) 当22ωβ<时,不出现振荡,称过阻尼。 4. 受迫振动 · 振子在周期性外力作用下发生的振动叫受迫振动,周期性外力称驱动力 · 受迫振动的运动方程为 22 P 2d d 2d d cos x x F x t t t m βωω++= 其中,2k m ω=,为振动系统的固有频率;2C m β=;F 为驱动力振幅。 · 当驱动力振动的频率p ω等于ω时,振幅出现最大值,称为共振。 5. 简谐振动的合成与分解 (1) 一维同频率的简谐振动的合成 若任一时刻t 两个振动的位移分别为 111()cos x A t ω?=+ 222()cos x A t ω?=+ 合振动方程可表示为 ()cos x A t ω?=+ 其中,A 和? 分别为合振动的振幅与初相位 A = 1122 1122 sin sin tan cos cos A A A A ?????+= +
第八章波动学基础 8.1已知波源在原点(x=0)的平面简谐波的方程为)cos(Cx Bt A y ?=式中A ,B ,C 为正值恒量.试求: (1)波的振幅,波速,频率,周期与波长; (2)写出传播放向上距离波源l 处一点的振动方程;(3)试求任何时刻,在波传播方向上相距为D 的两点的位相差. 解:(1)∵A、B、C 为正值恒量,所以该波沿X 轴正方向传播,与平面简谐波的 波动方程)(cos c x t A y ?=ω比较系数,可得 波的振幅为A,B =ω,C c =ω,∴B T π2=,π2B f =,C B C c = =ω∵f c λ=,∴C B C B CT π πλ22=?==. ∴该波的振幅为A,波速为 C B ,频率为π2B ,周期为B π2,波长为C π 2.(2)已知平面简谐波的方程为)cos(Cx Bt A y ?=,令式中的l x =即为传播方向上距波源l 处一点的振动方程:)cos(Cl Bt A y ?=.(3)设t 时刻,传播方向上相距为D 的两点分别为1x ,2x 那么这两点所对应的波动方程分别为: )cos(11Cx Bt A y ?=) cos(22Cx Bt A y ?=∴这两点的相位差φ?为:CD x x C =?=?=?1221φφφ. 8.2一列横波沿绳子传播时的波动方程为)410cos(05.0x t y ππ?=,式中x,y 以m 计,t 以s 计. (1)求此波的振幅、波速、频率、和波长; (2)求绳子上各质点振动时的最大速度和最大加速度; (3)求x=0.2m 处的质点在t=1s 时的位相,它是原点处质点在哪一时刻的位相?这一位相所代表的运动状态在t=1.25s 时刻到达哪一点?在t=1.5s 时刻到达哪一点?
第八章 弹性体振动 §8-1 概述 任何机器的零部件都是由质量和刚度连续分布的物体所组成,也就是说这些零部件都是弹性体。但是在很多情况下,为了使问题简化,计算简便,常常将它们简化成多自由度的离散系统来分析。然而,在有些工程实践中,却要求对弹性体振动作严密的分析,这时就不能对它进行离散化处理。因此对工程上常用的连续弹性体(如杆、轴、梁、板、壳,以及它们的组合系统)进行振动分析求出它们的固有频率和主振型,计算他们的动力响应,这在实用上和理论研究上都有非常重要的意义。 多自由度系统(离散系统)和弹性体(连续系统)是对同一个客观事物(机器零部件)的不同的分析方法,因此它们之间必然存在一定的联系和明显的区别。 x x ) a ) b (( 图8-1 多自由度系统和弹性体的动力学模型 从动力学模型上看,多自由度系统是将零部件看成由质量、刚度集中在若干点上的离散元件所组成。如图8-1(a )所示它是把一个零件分成若干段,每段的质量分成两半,分别加在两端的集中质量上。两个质量之间则用不计质量、只计刚度的弹性元件相联结。这样就形成了具有n 个集中质量(m 1、m 2、…m n )和n -1个弹簧(k 1、k 2、…、k n -1)所组成的n 个自由度的集中参数模型,其广义坐标用振动位移y i (t)表示。弹性体则将零部件看成由质量、刚度连续分布的物体所组成如图8-1(b )所示。当一个零件的分段数n →∞时,离散系统就变成连续系统,其横坐标x 也从一个离散值(x 1、x 2、…x n )变为连续函数。因此系统的广义坐标要用一个由截面位置x 和时间t 所表达的二元函数y (x ,t )来表示。这就是说,弹性体有无穷多个广义坐标,而且它们之间有一定的相互关系。 从运动方程来看,多自由度系统用一个方程数与自由度相等的常系数线性微分方程组来描述;而弹性体则要用偏微分方程式来描述,其阶数决定于所研究的对象和振动形态。 从振动特性来看,多自由系统振动特性的推广即为弹性体的振动特性;而弹性体振动特性的近似即为多自由度系统的振动特性。 在本章中,我们只研究弹性体的最简单情况,即等截面的杆、轴的振动,而且假设弹性体的质量和刚度均匀分布,在振动过程中弹性体不产生裂纹,即要求广义坐标的变化是连续的。此外,我们的讨论只局限在线性范围内,即认为弹性体的应力应变关系服从虎克定律,而且是均质各向同性的。
1-1一个物体放在水平台面上,当台面沿铅垂方向作频率为5 Hz的简谐 振动时,要使物体不跳离平台,对台面的振幅应有何限制? 解:物体与桌面保持相同的运动,知桌面的运动为 , x=A sin10πt ; 由物体的受力分析,N= 0(极限状态) 物体不跳离平台的条件为:; 既有, , 由题意可知Hz,得到,mm。 1-2有一作简谐振动的物体,它通过距离平衡位置为cm及 cm时的速度分别为20 cm/s及cm/s,求其振动周期、振幅和最大速度。解: 设该简谐振动的方程为;二式平方和为 将数据代入上式: ; 联立求解得 A=10.69cm;1/s;T=s 当时,取最大,即: 得:
答:振动周期为2.964s;振幅为10.69cm;最大速度为22.63m/s。 1-3 一个机器内某零件的振动规律为 ,x的单位是cm,1/s 。这个 振动是否为简谐振动?试求它的振幅、最大速度及最大加速度,并用旋转矢量表示这三者之间的关系。 解: 振幅A=0.583 最大速度 最大加速度 1-4某仪器的振动规律为。此振动是否为简谐振动?试用x- t坐标画出运动图。 解:因为ω1=ωω2=3ω,ω1≠ω2.又因为T1=2π/ωT2=2π/3ω,所以,合成运动为周期为T=2π/3ω的非简谐运动。两个不同频率的简谐振动合成不是简谐振动,当频率比为有理数时,可合称为周期振动,合成振动的周期是两个简谐振动周期的最小公倍数。 1-5已知以复数表示的两个简谐振动分别为和,试求它们的合成的复数表示式,并写出其实部与虚部。 解:两简谐振动分别为,, 则:=3cos5t+3isin5t =5cos(5t+)+3isin(5t+) 或; 其合成振幅为:=
第二章振动光谱作业 1.红外光区的划分? 红外光按波长不同划分为三个区域:近红外区域(1-2.5微米)/中红外区域(2.5-25微米)/远红外区域(25-1000微米) 2.振动光谱有哪两种类型?多原子分子的价键或基团的振动有哪些类型?同一种基团哪种振动的频率较高?哪种振动的频率较低? 振动光谱有红外吸收光谱和激光拉曼光谱两种类型。 价键或基团的振动有伸缩振动和弯曲振动。其中伸缩振动分为对称伸缩振动和非对称伸缩振动;弯曲振动则分为面内弯曲振动(剪式振动、面内摇摆振动)和面外弯曲振动(扭曲振动、面外摇摆振动)。 伸缩振动频率较高,弯曲振动频率较低。(键长的改变比键角的改变需要更大的能量)非对称伸缩振动的频率高于对称伸缩振动。 3. 说明红外光谱产生的机理与条件? 产生机理: 当用红外光波长范围的光源照射物质时,物质因受光的作用,引起分子或原子基团的振动,若振动频率恰与红外光波段的某一频率相等时就引起共振吸收,使光的透射强度减弱,使通过试样的红外光在一些波长范围内变弱,在另一些范围内则较强,用光波波长(或波数)对光的透过率作图,便可得到红外光谱 产生条件: 1)辐射应具有能满足物质产生振动-转动跃迁所需的能量,即振动的频率与红外光谱谱段的某频率相等。 2)辐射与物质间有相互偶合作用,即振动中要有偶极矩变化 4.红外光谱图的表示法? 红外光谱图的表示法:横坐标:波数cm-1或者波长μm 纵坐标:透过率%或者吸光度A 5. 红外光谱图的四大特征(定性参数)是什么? 如何进行基团的定性分析?如何进行物相的定性分析? 四大特征:谱带(或者说是吸收峰)的数目、位置、形状和强度。 进行基团的定性分析时,首先,观察特征频率区,根据基团的伸缩振动来判断官能团。 进行物相的定性分析: 进行物相的定性分析: 对于已知物: a、,观察特征频率区,判断官能团,以确定所属化合物的类型 b、观察指纹频率区,进一步确定基团的结合方式 c、对照标准谱图进行比对,若被测物质的与已知物的谱图峰位置和相对强度完全一致,则可确认为一种物质。 对于未知物:A、做好准备工作。了解试样的来源,纯度、熔点、沸点点各种信息,如果是混合物,尽量用各种化学、物理的方法分离 B、按照鉴定已知化合物的方法进行 6. 何谓拉曼效应?说明拉曼光谱产生的机理与条件? 光子与试样分子发生非弹性碰撞,也就是说在光子与分子相互作用中有能量的交换,产生了频率的变化,且方向改变叫拉曼效应。 产生的机理: 斯托克斯线产生机理:处于振动基态的分子在光子作用下,激发到较高的不稳定的能态(虚
第5章振动和波动 5-1一个弹簧振子0.5kg m =,50N m k =,振幅0.04m A =,求 (1)振动的角频率、最大速度和最大加速度; (2)振子对平衡位置的位移为x =0.02m 时的瞬时速度、加速度和回复力; (3)以速度具有正的最大值的时刻为计时起点,写出振动方程。 解:(1))s rad (105 .050 === m k ω (2) 设 当(3) 5-2 解: ν= 5-3式中1,k 10x ,弹簧2所受的合外力为 由牛顿第二定律得2122d ()d x m k k x t =-+ 即有2122() d 0d k k x x t m ++ = 上式表明此振动系统的振动为简谐振动,且振动的圆频率为
振动的频率为2π ω ν= = 5-4如图所示,U 形管直径为d ,管内水银质量为m ,密度为ρ,现使水银面作无阻尼自由振动,求振动周期。 振动周期5-5 5-6如图所示,轻弹簧的劲度系数为k ,定滑轮的半径为R 、转动惯量为J ,物体质量为m ,将物体托起后突然放手,整个系统将进入振动状态,用能量法求其固有周期。 习题
解:设任意时刻t ,物体m 离平衡位置的位移为x ,速率为v ,则振动系统的总机械能 式中 于是5-7已知5-8平衡位置距O '点为:000l x l k +=+ 以平衡位置为坐标原点,如图建立坐标轴Ox ,当物体运动到离开平衡位置的位移为x 处时,弹簧的伸长量就是x x +0,所以物体所受的合外力为 物体受力与位移成正比而反向,即可知物体做简谐振动国,此简谐振动的周期为 5-9两质点分别作简谐振动,其频率、振幅均相等,振动方向平行。在每次振动过程中,它们在经过振幅的一半的地方时相遇,而运动方向相反。求它们相差,并用旋转矢量图表示出来。 习题5-6图
1.结合实际工作,综合论述开展设备监测诊断工作的八个固定工作程序。 开展设备监测诊断工作的八个固定工作程序为: (1)定监测对象 (2)定监测参数 (3)定监测仪器和设备 (4)定监测点 (5)定监测周期 (6)定监测标准 根据不同的设备,参照国内外已发布的通用标准,或结合实际工作经验制定适合本单位特点的判别标准。 通常情况下,判别标准有三类:一是绝对标准、二是相对标准、三是类比判断标准。 (7)定监测规程 (8)定监测人员 2.在振动监测中,振动传感器的选择十分重要。阐述选择振动传感器应注意的问题。 (1) 测量范围 测量范围又称量程,是保证传感器有用的首要指标,因为超量程测量不仅意味着测量结果的不可靠,而且还可能造成传感器的损坏。 (2) 频响范围 所选传感器的工作频响范围应覆盖整个需要测试的信号频段并略有超出,也就是说应使传感器工作在线性区:其下限频率低于所测信号的低频段,上限频率高于所测信号的高频段。 (3) 信噪比 一般而言,总是希望传感器的灵敏度尽量高,以便检测微小信号,但外界噪声的混入也相应地影响增大,因此要求传感器的信噪比要高,以便在充分放大被测信号的同时,能最有效地抑制噪声信号。 (4) 稳定性 对于长期工况监测,尤其是在线式测量的传感器,要求时间稳定性好,信号漂移越小越好。对于水下、高温等特殊工作环境,还应考虑传感器的环境稳定性。 此外,传感器的工作方式、外形尺寸、重量等也是需要考虑的因素。 3.分析旋转机械转子不平衡故障原因,如何综合分析诊断转子不平衡故障? 转子质量偏心及转子部件缺损是导致转子不平衡的两种因素。转子质量偏心是由于转子的制造误差、装备误差、材质不均匀等原因造成。转子部件缺损是指转子在运行中由于腐蚀、磨损或受疲劳应力作用,使转子叶轮、叶片局部损坏、脱落等原因造成。转子轴系允许最大不平衡量的计算方法: G —平衡等级 m —允许不平衡量 U-不平衡量 M-转子质量 r-平衡半径 计算: e=G/ω 不平衡量:U=M.e 允许的最大不平衡质量:m=U/r M r m M U e == =G/ω U=M.e m=U/r 对转子不平衡故障进行综合分析应把握以下特征: (1)振动的时域波形为正弦波;
物质的红外光谱是其分子结构的反映,谱图中的吸收峰与分子中各基团的振动形式相对应。多原子分子的红外光谱与其结构的关系,一般是通过实验手段得到。这就是通过比较大量已知化合物的红外光谱,从中总结出各种基团的吸收规律。实验表明,组成分子的各种基团,如O-H、N-H、C-H、C=C、C=OH和C C 等,都有自己的特定的红外吸收区域,分子的其它部分对其吸收位置影响较小。通常把这种能代表及存在、并有较高强度的吸收谱带称为基团频率,其所在的位置一般又称为特征吸收峰。 一、基团频率区和指纹区 (一)基团频率区 中红外光谱区可分成4000 cm-1 ~1300 cm-1和1800cm-1 (1300 cm-1 )~ 600 cm-1两个区域。最有分析价值的基团频率在4000 cm-1 ~ 1300 cm-1 之 间,这一区域称为基团频率区、官能团区或特征区。区内的峰是由伸缩振动产生的吸收带,比较稀疏,容易辨认,常用于鉴定官能团。在1800 cm-1 (1300 cm-1 )~600 cm-1 区域内,除单键的伸缩振动外,还有因变形振动产生的谱带。这种振动与整个分子的结构有关。当分子结构稍有不同时,该区的吸收就有细微的差异,并显示出分子特征。这种情况就像人的指纹一样,因此称为指纹区。指纹区对于指认结构类似的化合物很有帮助,而且可以作为化合物存在某种基团的旁证。基团频率区可分为三个区域: (1)4000 ~2500 cm-1 X-H伸缩振动区,X可以是O、H、C或S等原子。 O-H基的伸缩振动出现在3650 ~3200 cm-1 范围内,它可以作为判断有无醇类、酚类和有机酸类的重要依据。当醇和酚溶于非极性溶剂(如CCl4),浓度于0.01mol. dm-3时,在3650 ~3580 cm-1处出现游离O-H基的伸缩振动吸收,峰形尖锐,且没有其它吸收峰干扰,易于识别。当试样浓度增加时,羟基化合物产生缔合现象,O-H基的伸缩振动吸收峰向低波数方向位移,在3400 ~3200 cm-1 出现一个宽而强的吸收峰。胺和酰胺的N-H伸缩振动也出现在3500~3100 cm-1 因此,可能会对O-H伸缩振动有干扰C-H的伸缩振动可分为饱和和不饱和的两种。饱和的C-H伸缩振动出现在3000 cm-1以下,约3000~2800 cm-1 ,取代基对它们影响很小。如-CH3 基的伸缩吸收出现在2960 cm-1和2876 cm-1附近;-
第八章波动学基础 ◆本章学习目标 1.了解波的基本概念; 2.掌握最基本的波动——平面间谐波的波动方程及运动规律; 3.掌握波的能量特点; 4.掌握波具有的基本现象——反射、折射、干涉和驻波; 5.了解多普勒效应; 6.了解声波、超声波和次声波。 ◆本章教学内容 1.机械波的产生及间谐波; 2.波速、波长、周期和频率; 3.波动方程; 4.波的能量和能流; 5.惠更斯原理波的反射和折射; 6.波的叠加原理波的干涉; 7.驻波; 8.多普勒效应; 9.声波、超声波、次声波 ◆本章教学重点 1.间谐波方程及运动规律; 2.波的叠加及驻波。 ◆本章教学难点 1.波方程的建立及其意义; 2.驻波的运动特点; 3.多普勒效应。
§8.1 机械波的产生和传播简谐波 振动和波动是密切关联又相互区别的两种运动形式。任何波动都是有振动引起的,激发波动的振动系统称为波源。波动分为两大类:一类是机械振动在媒质中的传播,称机械波。另一类是变化的电场和变化的磁场在空间的传播,称为电磁波。 一、机械波的产生 机械振动在弹性媒质中的传播过程称为机械波。就每一质点来说,只是做振动,就全部媒质来说,振动传播形成机械波。产生机械波的条件是:具有波源和弹性媒质。 二、横波和纵波 在波动中,如果质点的振动方向和波的传播方向相互垂直,这种波称为横波。如果质点振动方向和波的传播方向相互平行,这种波称为纵波。各种复杂的波都可分解为横波和纵波。在波动中真正传播的是振动、波形和能量;波形传播是现象,振动传播是实质,能量传播是波动的量度。 如果产生波动的波源作简谐振动,在振动传播过程中,从波源所在位置开始,媒质中各质点相继开始做简谐振动,如果媒质是各向同性均匀且完全弹性的(即媒质不消耗能量),则媒质中各质点的振动频率和波源相同,且各质点具有相同的振幅。这种波称为简谐波。 三、波振面和波射线 把波振面为球面的波动称为球面波,点波源在均匀媒质中产生的波就是球面波。把波振面为平面的波称为平面波。波的传播方向称为波射线。显然,在波振面上每一点,波射线总是和波阵面正交。图8-1所示,画出了这两种典型波的波阵面和波射线。 图8-1波阵面和波射线
旋转机械振动与故障诊断研究综述 1.前言 工业生产离不开回转机械,随着装置规模不断扩大,越来越多的高速回转机械应用于工业生产,诸如高速离心压缩机、汽轮机发电机组。动态失稳造成的重大恶性事故屡见不鲜。急剧上升的振动可在几十秒之内造成机组解体,甚至祸及厂房,造成巨大的经济损失和人员伤亡。此外,机械振动可能降低设备机械性能,加速机械零部件的磨损,发出的噪声损害操作者的健康。但是振动也能合理运用,如工业上常用的振动筛、振动破碎等都是振动的有效利用。工程技术人员必须认真对待机械振动问题,当机组产生有害的振动时,及时分析原因,坚持用合理的振动测试标准,采取科学的防治措施。 2.旋转机械振动标准 ●旋转机械分类: Ⅰ类:为固定的小机器或固定在整机上的小电机,功率小于15KW。 Ⅱ类:为没有专用基础的中型机器,功率为15~75KW。刚性安装在专用基础上功率小于300KW的机器。 Ⅲ类:为刚性或重型基础上的大型旋转机械,如透平发电机组。 Ⅳ类:为轻型结构基础上的大型旋转机械,如透平发电机组。 ●机械振动评价等级: 好:振动在良好限值以下,认为振动状态良好。 满意:振动在良好限值和报警值之间,认为机组振动状态是可接受的(合格),可长期运行。 不满意:振动在报警限值和停机限值之间,机组可短期运行,但必须加强监测并采取措施。 不允许:振动超过停机限值,应立即停机。 3.振动产生的原因 旋转机械振动的产生主要有以下四个方面原因,转子不平衡,共振,转子不对中和
机械故障。 4.旋转机械振动故障诊断 4.1转子不平衡振动的故障特征 当发生不平衡振动时,其故障特征主要表现在如下方面: 1 )不平衡故障主要引起转子或轴承径向振动,在转子径向测点上得到的频谱图, 转速频率成分具有突出的峰值。 2 )单纯的不平衡振动,转速频率的高次谐波幅值很低,因此在时域上的波形是一个正弦波。 3 )转子振幅对转速变化很敏感,转速下降,振幅将明显下降。 4 )转子的轴心轨迹基本上为一个圆或椭圆,这意味着置于转轴同一截面上相互垂直的两个探头,其信号相位差接近90°。 4.2旋转机械振动模糊诊断 4.2.1 振动模糊诊断基本原理 振动反映了系统状态及变化规律的主要信息,统计资料表明:机械设备的故障有67 % 左右是由于振动引起的,并且能从振动和振动辐射出的噪声反映出来。回转机械的振动信息尤其明显,且振动诊断具有快速、简便、准确和在线诊断等一系列优点,所以振动诊断法是旋转机械状态识别和故障诊断的最有效、最常用的方法。 但是,由于机械系统本身的复杂性以及所摄取的振动信号强烈的模糊性,使故障之间没有清晰的界限,这时利用传统的振动频谱分析,对一个故障可能有多个征兆来表现,一个征兆也可能有多个故障原因的复杂现象,往往难定两者的对应关系进行指导维修。振动模糊法,将模糊数学与振动诊断相结合,利用模糊综合评判技术,较好地处理了回转机械故障的不确定性问题。 4.2.2旋转机械振动模糊诊断法的实现 隶属函数的确定
第4章 振动与波动 一、选择题 1. 已知四个质点在x 轴上运动, 某时刻质点位移x 与其所受合外力F 的关系分别由下列四式表示(式中a 、b 为正常数).其中不能使质点作简谐振动的力是 [ ] (A) abx F = (B) abx F -= (C) b ax F +-= (D) a bx F /-= 2. 在下列所述的各种物体运动中, 可视为简谐振动的是 [ ] (A) 将木块投入水中, 完全浸没并潜入一定深度, 然后释放 (B) 将弹簧振子置于光滑斜面上, 让其振动 (C) 从光滑的半圆弧槽的边缘释放一个小滑块 (D) 拍皮球时球的运动 3. 欲使弹簧振子系统的振动是简谐振动, 下列条件中不满足简谐振动条件的是 [ ] (A) 摩擦阻力及其它阻力略去不计 (B) 弹簧本身的质量略去不计 (C) 振子的质量略去不计 (D) 弹簧的形变在弹性限度内 4. 当用正弦函数或余弦函数形式表示同一个简谐振动时, 振动方程中不同的量是 [ ] (A) 振幅 (B) 角频率 (C) 初相位 (D) 振幅、圆频率和初相位 5. 如T4-1-5图所示,一弹簧振子周期为T .现将弹簧截去一半,仍挂上原来的物体, 则新的弹簧振子周期为 [ ] (A) T (B) 2T (C) 3T (D) 0.7T 6. 三只相同的弹簧(质量忽略不计)都一端固定, 另一端连接质 量为m 的物体, 但放置情况不同.如T4-1-6图所示,其中一个平放, 一个斜放, 另一个竖直放.如果让它们振动起来, 则三者的 [ ] (A) 周期和平衡位置都不相同 (B) 周期和平衡位置都相同 (C) 周期相同, 平衡位置不同 (D) 周期不同, 平衡位置相同 7. 如T4-1-7图所示,升降机中有一个做谐振动的单摆, 当升降机静止时, 其振动周期为2秒; 当升降机以加速度上升时, 升降机中的观察者观察到其单摆的振动周期与原来的振动周期相比,将 [ ] (A) 增大 (B ) 不变 (C) 减小 (D) 不能确定 T 4-1-6图 T 4-1-7图 T 4-1-5图
机械振动学学习报告 摘要:简述了机械振动学的发展历程,振动利用中的若干新工艺理论与技术,振动机械及其相关技术的应用与发展,介绍了振动在人类生活工作中起到了非常重要的作用。通过对具体实例——单电机振动给料机的计算分析,得出机械振动对机器工作性能的影响。并介绍了单自由度、多自由度的线性振动系统振动的基本理论和隔振的基本原理。关键词:机械振动;振动给料机;线性振动系统 Abstract:This paper describes the development course of study of mechanical vibration and the utilization of some new technology theory and technology. The vibration has played a very important role in human life and work. By analyzing the practical example-single motor , vibrating feeder calculation and analysis of mechanical vibration machine has influence on the performance. And introduced the single-degree-of-freedom, multi-freedom system vibration of the linear vibration of the basic theory and the basic principle of vibration isolation. Keywords:Mechanical vibration; Vibrates the feeding machine; Linear vibration system 第一章绪论 1.1振动振动学的发展 振动振动学科是20世纪后半期逐渐形成和发展起来的一门新学科。目前正处在迅速发展过程中,由于该学科所涉及的有关技术与工业生产及人类生活联系十分密切,它能为社会创造重大的经济效益和社会效益,能为人类生活提供极大的方便和良好的服务,目前已成为人类生产活动与生活过程中一种不可缺少的手段与必要的机制。国内以闻邦椿院士为首的科研团队一直以极大的精力从事这一领域的研究,在振动利用工程这一学科的多个领域取得了一系列的研究成果,促进了该学科的形成与发展。自然界和人类社会中的某一个量随时间或大或小的变化即称为振动。振动是物质世界运动的一种基本形式,物质世界中的每一个物体及其中的每一个分子都始终处于振动之中。毫无例外,人类自身的每一器官也每时每刻都处在振动之中,例如,心脏的搏动、血液的循环、肺部的张缩呼吸、脑细胞的思维以及耳膜的振动和声带的振动等,前面所列举的这些振
第六章振动光谱作业 1.红外光区的划分? 2.振动光谱有哪两种类型?多原子分子的价键或基团的振动有哪些类型?同一种基团哪种振动的频率较高?哪种振动的频率较低? 3. 说明红外光谱产生的机理与条件? 4.红外光谱图的表示法? 5. 红外光谱图的四大特征(定性参数)是什么? 如何进行基团的定性分析?如何进行物质的定性分析? 6. 何谓拉曼效应?说明拉曼光谱产生的机理与条件? 7. 拉曼位移是什么?拉曼谱图的表示法? 8.比较拉曼光谱与红外光谱。 9.某一化合物的分子式是C 4H 8 0,其红外光谱图如下,请推断其结构。 1381 29632824 2722 1728 1467 1160 10. .下图为线型聚乙烯(······—CH 2—CH 2 —CH 2 —CH 2 ······)的 红外光谱图(a)和激光拉曼光谱图(b),根据聚乙烯分子的结构特征,说明两张图谱有何不同,并解释出现明显差异的原因。(解释2张图谱中4个箭头处的异同,并说明原因。)
综合分析题 若要进行下列测试分析项目,从你所学过的现代测试方法中挑选出一种最佳方法,并简述理由。 1.多晶转变温度的检测; 2.尺寸小于5μ的颗粒的显微形貌观察; 3.物质晶体结构的研究; 4.断口上粒状夹杂物的形貌及化学成分分析; 5.被缴获毒品的种类鉴定; 6.酸腐蚀后金属表面的结构分析; 7.材料晶界条纹或晶体缺陷(如位错、层错等)的观察分析; 8. 陶瓷釉料的成分分析; 9.玻璃中包裹体的分析; 10. 高分子材料玻璃化转变温度的测量。 各分析方法的英文缩写: X射线衍射:;X射线荧光光谱: X射线光电子能谱:;等离子发射光谱: 原子吸收光谱:;透射电镜: