机械原理课程机构设计 实验报告 题目:曲柄滑块机构的运动分析及应用 小组成员与学号:泽陆(11071182) 柯宇 (11071177) 熊宇飞(11071174) 保开 (11071183) 班级: 110717 2013年6月10日
摘要 (3) 曲柄滑块机构简介 (4) 曲柄滑块机构定义 (4) 曲柄滑块机构的特性及应用 (4) 曲柄滑块机构的分类 (8) 偏心轮机构简介 (9) 曲柄滑块的动力学特性 (10) 曲柄滑块的运动学特性 (11) 曲柄滑块机构运行中的振动与平衡 (14) 参考文献 (15) 组员分工 (15)
摘要 本文着重介绍了曲柄滑块机构的结构,分类,用途,并进行了曲柄滑块机构的动力学和运动学分析,曲柄滑块机构的运动学特性分析,得出了机构压力表达式,曲柄滑块机构的运动特性分析,得出了滑块的位移、速度和加速度的运动表达式。最后,对曲柄滑块机构运动中振动、平衡稳定性等进行了总结。 关键字:曲柄滑块动力与运动分析振动与平稳性 ABSTRACT The paper describes the composition of planar linkage, focusing on the structure, classification, use of a slider-crank mechanism and making the dynamic and kinematic analysis, kinematics characteristics of the crank slider mechanism analysis for a slider-crank mechanism, on one hand , we obtain the drive pressure of the slider-crank mechanism ,on the other hand,we obtain the expression of displacement, velocity and acceleration of movement. Finally, the movement of the vibration and balance stability of the crank slider mechanism are summarized.
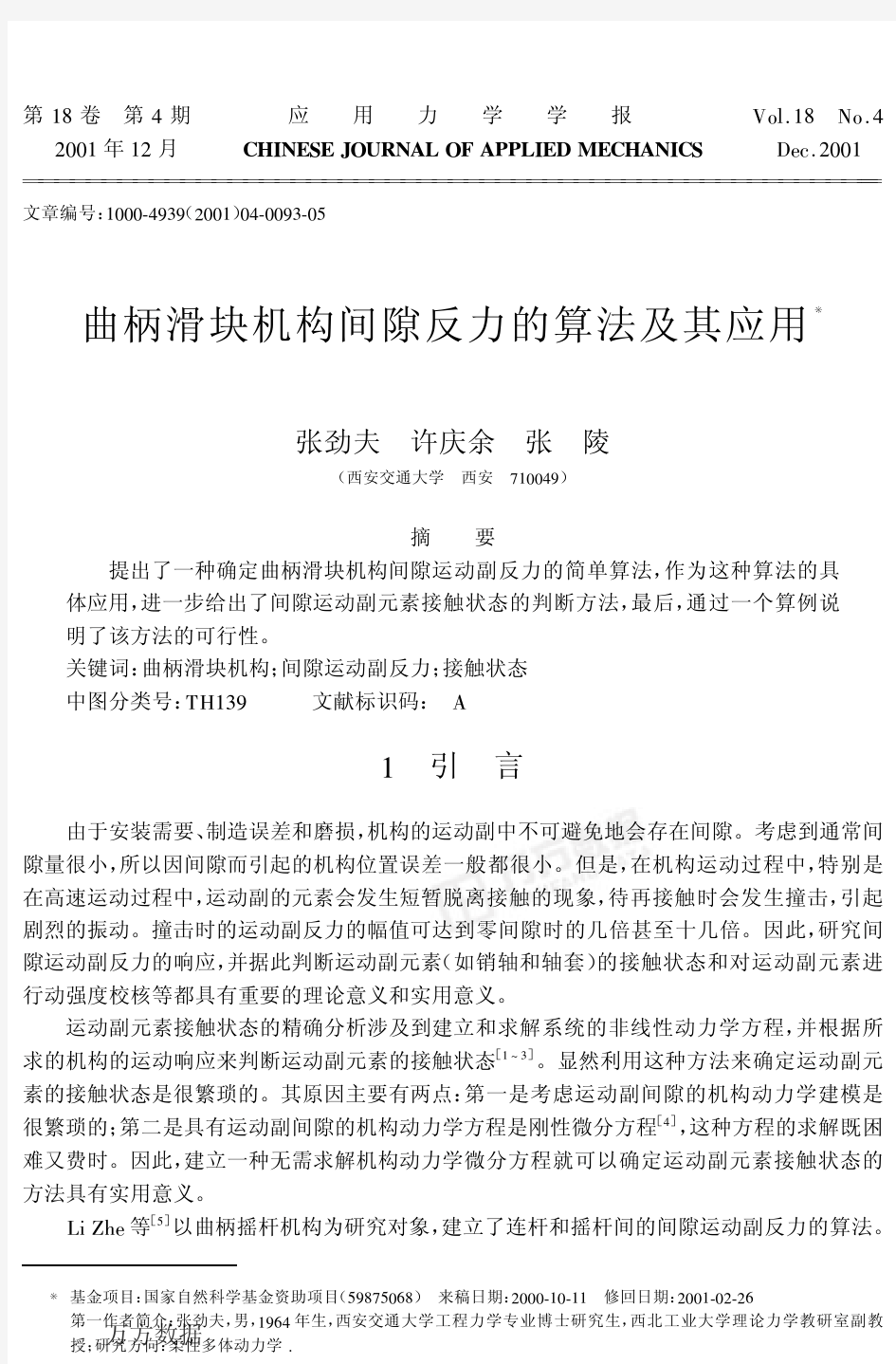
曲柄滑块机构运动分析 一、相关参数 在图1所示的曲柄滑块机构中,已知各构件的尺寸分别为mm l 1001=,mm l 3002=,s rad /101=ω,试确定连杆2和滑块3的位移、速度和加速度,并绘制出运动线图。 图1 曲柄滑块机构 二、数学模型的建立 1、位置分析 为了对机构进行运动分析,将各构件表示为矢量,可写出各杆矢所构成的封闭矢量方程。 将各矢量分别向X 轴和Y 轴进行投影,得 0sin sin cos cos 22112211=+=+θθθθl l S l l C (1) 由式(1)得 2、速度分析 将式(1)对时间t 求导,得速度关系 C v l l l l =--=+222111222111sin sin 0 cos cos θωθωθωθω (2) 将(2)式用矩阵形式来表示,如下所示 ??? ???-=??? ?????? ???-1111122222cos sin . 0 cos 1 sin θθωωθθl l v l l C (3) 3、加速度分析 将(2)对时间t 求导,得加速度关系 三、计算程序 1、主程序 %1.输入已知数据 clear; l1=; l2=; e=0; hd=pi/180; du=180/pi; omega1=10; alpha1=0;
%2.曲柄滑块机构运动计算 for n1=1:721 theta1(n1)=(n1-1)*hd; %调用函数slider_crank计算曲柄滑块机构位移、速度、加速度 [theta2(n1),s3(n1),omega2(n1),v3(n1),alpha2(n1),a3(n1)]=slider_crank(theta1(n1),omega1,alpha1,l1,l2,e); end figure(1); n1=0:720; subplot(2,3,1) plot(n1,theta2*du); title('连杆转角位移线图'); xlabel('曲柄转角\theta_1/\circ'); ylabel('连杆角位移/\circ'); grid on subplot(2,3,2) plot(n1,omega2); title('连杆角速度运动线图'); xlabel('曲柄转角\theta_1/\circ'); ylabel('连杆角速度/rad\cdots^{-1}'); grid on subplot(2,3,3) plot(n1,alpha2); title('连杆角加速度运动线图'); xlabel('曲柄转角\theta_1/\circ'); ylabel('连杆角加速度/rad\cdots^{-2}'); grid on subplot(2,3,4) plot(n1,s3); title('滑块位移线图'); xlabel('曲柄转角\theta_1/\circ'); ylabel('滑块位移/\m'); grid on
曲柄滑块机构运动分析
曲柄滑块机构运动分析 一、相关参数 在图1所示的曲柄滑块机构中,已知各构件的尺寸分别为mm l 1001=,mm l 3002=,s rad /101 =ω ,试确定连杆2和滑块3的 位移、速度和加速度,并绘制出运动线图。 图1 曲柄滑块机构 二、数学模型的建立 1、位置分析 为了对机构进行运动分析,将各构件表示为矢量,可写出各杆矢所构成的封闭矢量方程。 C S l l =+21 将各矢量分别向X 轴和Y 轴进行投影,得 sin sin cos cos 22112211=+=+θθθθl l S l l C (1) 由式(1)得 ??? ? ??-=2112sin arcsin l l θθ 2211cos cos θθl l S C += 2、速度分析 将式(1)对时间t 求导,得速度关系
C v l l l l =--=+222111222111sin sin 0 cos cos θωθωθωθω (2) 将(2)式用矩阵形式来表示,如下所示 ??????-=????????????-11 11122222cos sin . 0 cos 1 sin θθωωθθl l v l l C (3) 3、加速度分析 将(2)对时间t 求导,得加速度关系 ??????--=????????????+????????????-11 11111222222222222sin cos 0 sin 0 cos 0 cos 1 sin θωθωωωθωθωαθθl l v l l a l l C C 三、计算程序 1、主程序 %1.输入已知数据 clear; l1=0.1; l2=0.3; e=0; hd=pi/180; du=180/pi; omega1=10; alpha1=0; %2.曲柄滑块机构运动计算 for n1=1:721
1、对心曲柄滑块机构运动分析 由图可得任意时刻滑块运行距离: )cos 1()cos 1(cos cos βαβα-+-=--+=L R L R L R S 且 αβsin sin R L = 所以 αλαβsin sin sin ==L R )(λ=L R 所以 αλββ222sin 1sin 1cos -=-= αλ22sin 211-≈ ))sin 211(sin 1sin 41(2222244αλαλαλ--内,分解为几乎为零,可带入因 且
)2cos 1(21sin 2 αα-= 所以 )2cos 1(411cos 2αλβ--= 所以有滑块运行距离: ??????-+-=?? ????-+-=-+-=)2cos 1(41)cos 1()2cos 1(41)cos 1()2cos 1(4 1)cos 1(2αλααλλααλαR R L R L R S 滑块速度V 为: ??????+=??????+=?? ?????+=?==t 2sin 21t sin 2sin 21sin 2sin 241sin ωωωαλαωαλαωααL R R R R dt d d dS dt dS V 滑块加速度为: )t cos t (cos )2cos (cos 22ωωωαλαωααL R R R dt d d dV dt dV a +=+=?==
二、曲轴扭矩理论计算 对曲柄滑块机构做受力分析,在任一时刻滑块、压杆受力情况如下图所示 对滑块做力平衡分析有 βcos P P AB = 曲柄处转矩为 11m P M AB ?= 其中力臂 ()βα+=sin 1R m )sin(1βα+=R P M AB 所以得 又 ) 2sin 2(sin cos sin sin 1sin sin cos cos sin )sin(22αλ αααλαλαβαβαβα+≈+-=+=+
具有最优传力性能的曲柄滑块机构的设计 宁海霞1董萍 摘要:在曲柄滑块机构的设计中,将x作为设计变量,求出已知滑块行程H,行程速比系数K时机构传力性能最优的x值,使得最小传动角γ 为最大,从 min 而设计出此机构。 关键词:最优传力性能;曲柄滑块机构;行程速比系数;最小传动角机器种类很多,但它们都是由各种机构组成的,曲柄滑块机构就是常用机构之一。它有一个重要特点是具有急回特性。故按行程速比系数K设计具有最优传力性能的曲柄滑块机构是设计中常遇到的问题。本文将x作为设计变量,给出了解决问题的方法。
在曲柄与滑块导路垂直的位置,其值为: )(cos 1min b e a +=-γ (1) 2.X 和最小传动角γmin 的关系 设计一曲柄滑块机构,已知:滑块行程H ,行程速比系数K ,待定设计参数 为a 、b 和e 。 e 也就确定。下 在△AC 1C 2中 θcos ))((2)()(222a b a b a b a b H +--++-= 因为 x a b =- 所以 θcos )2(2)2(222a x x a x x H +-++=
2sin )1(cos 222θ θx H x a -+-= (2) 又因为 x e a x C AC b a H /2)sin(sin 21+= ∠+=θ 所以 H a x e /)2(sin 22+=θ (3) 将 a x b += 代入 (1) )( cos 1min a x a e ++=-γ (4) 将式(2)、(3)代入式(4),γmin 仅为 x 的函数,则可求得γ min 的值。 二、设计最优传力性能的曲柄滑块机构 设计变量 x 的取值范围。 寻优区间起点在C 1处: x min =0 寻优区间终点在M 点: θ tg H x = max 在 x 的取值范围内根据式(2)、(3)和(4)可求得x 一一对应的γmin 值。 利用一维寻优最优化技术黄金分割法,来求γmin 取极大值时的x 值。 将γ min 最大时的x 值代入(2)、(3)求出a 、e ,由b=x+a 求出b 值。 三、设计实例 试设计一曲柄滑块机构,已知滑块行程H=50mm ,行程速比系数K=1.5。求传力性能最优的曲柄滑块机构。 x 的取值范围为0~68.819mm ,x=19.104mm 时,γmin 的最大值为 27.458°。 曲柄a=22.537mm 连杆 b=41.641mm 偏心距 e=14.413 四、结论 本文结合图解法和解析法把x 作为设计变量,给出了根据行程速比系数K
实用文档之"1、对心曲柄滑块机构运动分析" 由图可得任意时刻滑块运行距离: )cos 1()cos 1(cos cos βαβα-+-=--+=L R L R L R S 且 αβsin sin R L = 所以 αλαβsin sin sin ==L R )(λ=L R 所以 αλββ222sin 1sin 1cos -=-= αλ22sin 211-≈
))sin 211(sin 1sin 41(2222244αλαλαλ--内,分解为几乎为零,可带入因 且 )2cos 1(21sin 2 αα-= 所以 )2cos 1(411cos 2αλβ--= 所以有滑块运行距离: ??????-+-=?? ????-+-=-+-=)2cos 1(41)cos 1()2cos 1(41)cos 1()2cos 1(4 1)cos 1(2αλααλλααλαR R L R L R S 滑块速度V 为: ??????+=??????+=?? ?????+=?==t 2sin 21t sin 2sin 21sin 2sin 241sin ωωωαλαωαλαωααL R R R R dt d d dS dt dS V 滑块加速度为: )t cos t (cos )2cos (cos 22ωωωαλαωααL R R R dt d d dV dt dV a +=+=?==
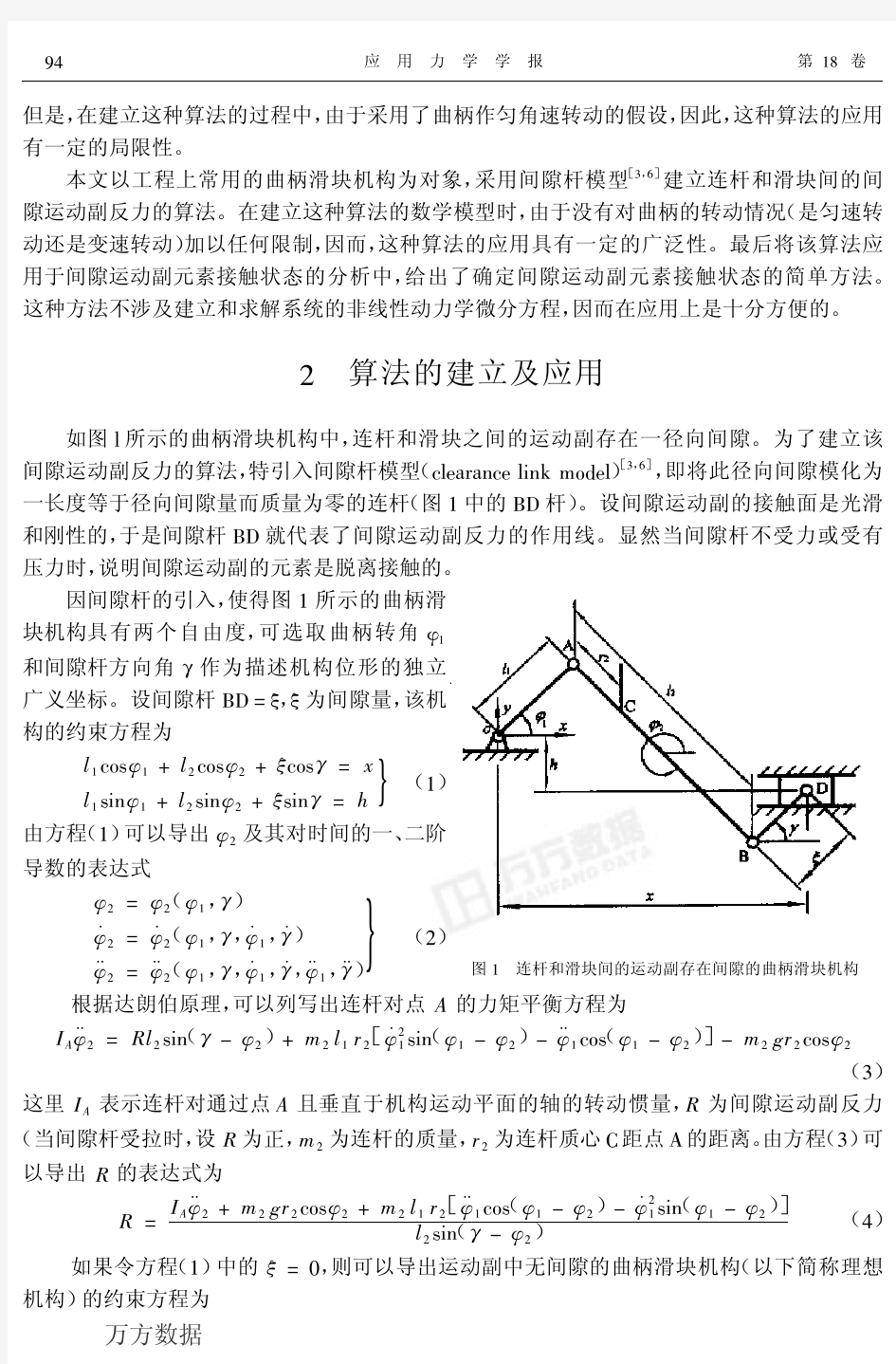
二、曲轴扭矩理论计算 对曲柄滑块机构做受力分析,在任一时刻滑块、压杆受力情况如下图所示 对滑块做力平衡分析有 β cos P P AB = 曲柄处转矩为 11m P M AB ?= 其中力臂 ()βα+=sin 1R m )sin(1βα+=R P M AB 所以得 又
曲柄滑块机构的运动分析及应用修订版 IBMT standardization office【IBMT5AB-IBMT08-IBMT2C-ZZT18】
机械原理课程机构设计 实验报告 题目:曲柄滑块机构的运动分析及应用 小组成员与学号:刘泽陆(11071182) 陈柯宇 (11071177) 熊宇飞(11071174) 张保开 (11071183) 班级: 110717 2013年6月10日 摘要 (3) 曲柄滑块机构简介 (4) 曲柄滑块机构定义 (4) 曲柄滑块机构的特性及应用 (4) 曲柄滑块机构的分类 (8) 偏心轮机构简介 (9)
曲柄滑块的动力学特性 (10) 曲柄滑块的运动学特性 (11) 曲柄滑块机构运行中的振动与平衡 (14) 参考文献 (15) 组员分工 (15) 摘要 本文着重介绍了曲柄滑块机构的结构,分类,用途,并进行了曲柄滑块机构的动力学和运动学分析,曲柄滑块机构的运动学特性分析,得出了机构压力表达式,曲柄滑块机构的运动特性分析,得出了滑块的位移、速度和加速度的运动表达式。最后,对曲柄滑块机构运动中振动、平衡稳定性等进行了总结。 关键字:曲柄滑块动力与运动分析振动与平稳性 ABSTRACT The paper describes the composition of planar linkage, focusing on the structure, classification, use of a slider-crank mechanism and making the dynamic and kinematic analysis, kinematics characteristics of the crank slider mechanism analysis for a slider-crank mechanism, on one hand , we obtain the drive pressure of the slider-crank mechanism ,on the other hand,we obtain the expression of displacement, velocity and acceleration of movement. Finally, the movement of the vibration and balance stability of the crank slider mechanism are summarized.
曲柄滑块机构的设计页 HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】
本篇再考察一道曲柄滑块机构的设计。同样是给定行程速比系数来确定杆长。 设计一偏置曲柄滑块机构,已知滑块的行程速比系数为,滑块的行程50 ,导路的偏距20 ,求曲柄和连杆长度,并求其最大压力角。 问题分析 首先设计机构,然后再求最大压力角。 机构的设计。先计算出行程速比系数如下 那么根据题意,最后的结果应当如下图。滑块的两个极位之间距离是50mm,而固定铰链A在与CD平行20mm的直线上,而且A点到C,D的夹角是36度。 图解总是从已知条件开始,然后逐步确定未知因素。本问题中知道三个数字:50mm,20mm,36度。而这个36度时与DC的距离相关的,所以图解时先画出滑块的两个极限位置,然后确定铰链A 所在的水平线,接着就是根据36度这个条件最终确定A的位置。 (1)确定滑块的极位及固定铰链A所在的直线 先绘制水平线段C2C1,使得其距离为50mm. 然后在其上方20mm的地方绘制一条水平直线I.那么铰链A就应该在这条直线上。 (2)根据极位夹角确定铰链A所在的圆 下面要根据极位夹角来确定A所在的曲线,这样,该曲线与上述曲线相交就可以唯一确定A点的位置。 A点到C1,C2形成的夹角是36度。那么所有与C1,C2形成夹角为36度的点有什么特征呢?---圆周角具有这种特征。
从几何知道,在一个圆上面,对应于同一个圆弧的圆周角都相等。基于这一点,过C2做直线垂直于C2C1,而作射线C1E与C2C1夹角为90-36=54度,二者交于点E,则C2EC1这个角度就是36度。 现在以C1E为直径做一个圆,则在该圆上任意取一点,该点与C2C1连线的夹角就都是36度,从而A点必然在该圆上面。 根据上述规则做出的上图发现,该圆与水平线I并不相交。这意味着作图有问题。实际上,刚才作的C1E在C2C1之下,所以导致不相交。因此改变策略,在C2C1之上作C1E,使得它与C2C1的夹角为54度。 然后以C1E为直径作出一个圆。该圆与直线I有两个交点:A1和A2。这样,该问题有两组解。但是观察下图可以发现,取A1或者A2,实际上结果是一样的,只是关于C2C1的中垂线对称而已。所以这里只取A1这个点,它就是固定铰支座A。 (3)测量曲柄和连杆的尺寸 量取A1C1,A1C2如下图。 则可以推知曲柄和连杆的长度 到此为止,连杆机构设计完毕。 (4)得到最大的压力角 从图中可以发现,当滑块在最左边时,有最大的压力角(滑块受到的推力与滑块速度方向的夹角),测量得到角度为53度。 至此,该曲柄滑块机构的设计和分析结束。
对心曲柄滑块机构计算 YKK standardization office【 YKK5AB- YKK08- YKK2C- YKK18】
1、对心曲柄滑块机构运动分析 由图可得任意时刻滑块运行距离: )cos 1()cos 1(cos cos βαβα-+-=--+=L R L R L R S 且 αβsin sin R L = 所以 αλαβsin sin sin ==L R )(λ=L R 所以 αλββ222sin 1sin 1cos -=-= αλ22sin 211-≈ ))sin 211(sin 1sin 41(2222244αλαλαλ--内,分解为几乎为零,可带入因 且
)2cos 1(21sin 2 αα-= 所以 )2cos 1(411cos 2αλβ--= 所以有滑块运行距离: ??????-+-=?? ????-+-=-+-=)2cos 1(41)cos 1()2cos 1(41)cos 1()2cos 1(4 1)cos 1(2αλααλλααλαR R L R L R S 滑块速度V 为: ??????+=??????+=?? ?????+=?==t 2sin 21t sin 2sin 21sin 2sin 241sin ωωωαλαωαλαωααL R R R R dt d d dS dt dS V 滑块加速度为: )t cos t (cos )2cos (cos 22ωωωαλαωααL R R R dt d d dV dt dV a +=+=?==
二、曲轴扭矩理论计算 对曲柄滑块机构做受力分析,在任一时刻滑块、压杆受力情况如下图所示 对滑块做力平衡分析有 βcos P P AB = 曲柄处转矩为 11m P M AB ?= 其中力臂 ()βα+=sin 1R m )sin(1βα+=R P M AB 所以得 又 )2sin 2(sin cos sin sin 1sin sin cos cos sin )sin(22αλαααλαλαβαβαβα+ ≈+-=+=+
曲柄滑块机构运动分析 Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-19998
曲柄滑块机构运动分析 一、相关参数 在图1所示的曲柄滑块机构中,已知各构件的尺寸分别为 mm l 1001=,mm l 3002=,s rad /101=ω,试确定连杆2和滑块3的位移、速度和加速度,并绘制出运动线图。 图1 曲柄滑块机构 二、数学模型的建立 1、位置分析 为了对机构进行运动分析,将各构件表示为矢量,可写出各杆矢所构成的封闭矢量方程。 将各矢量分别向X 轴和Y 轴进行投影,得 0sin sin cos cos 22112211=+=+θθθθl l S l l C (1) 由式(1)得 2、速度分析 将式(1)对时间t 求导,得速度关系 C v l l l l =--=+222111222111sin sin 0 cos cos θωθωθωθω (2) 将(2)式用矩阵形式来表示,如下所示 ??????-=????????????-11 11122222cos sin . 0 cos 1 sin θθωωθθl l v l l C (3) 3、加速度分析 将(2)对时间t 求导,得加速度关系 三、计算程序 1、主程序 %1.输入已知数据 clear;
l1=; l2=; e=0; hd=pi/180; du=180/pi; omega1=10; alpha1=0; %2.曲柄滑块机构运动计算 for n1=1:721 theta1(n1)=(n1-1)*hd; %调用函数slider_crank计算曲柄滑块机构位移、速度、加速度 [theta2(n1),s3(n1),omega2(n1),v3(n1),alpha2(n1),a3(n1)]=slider_crank(theta1(n1),omega1,alpha1 ,l1,l2,e); end figure(1); n1=0:720; subplot(2,3,1) plot(n1,theta2*du); title('连杆转角位移线图'); xlabel('曲柄转角\theta_1/\circ'); ylabel('连杆角位移/\circ'); grid on subplot(2,3,2) plot(n1,omega2); title('连杆角速度运动线图'); xlabel('曲柄转角\theta_1/\circ'); ylabel('连杆角速度/rad\cdots^{-1}'); grid on
S 二 R L - Rcos - L cos 二 R(V cos ) L(V cos ) 且 Lsin 二 Rsin : 所以 sin : =R sin : = sin : (R =) L L 所以 cos = \ V sin? = ^ - 2 sin 2: 彳 1 2 -2 T _ sin : 2 (因fk 4s in 4 □几乎为零,可带入 J i -丸2si n 2。内,分解为j (1-*人2 s 由图可得任意时刻滑块运行距离: 1对心曲柄滑块机构运动分析
in2。)2)
2 1 sin (1 - cos2 ) 2 所以 n 1 2 cos ——1 (1 - cos 2:) 4 所以有滑块运行距离: 1 2 S = R(1 - cos : ) L (1 - cos2 ) 4 - L 、1、 1 =R (1 - cos 、,-) (1 - cos2';) 1 R 4 」 =R (1 - cos :) 滑块速度V 为: 滑块加速度为: 2 2 R R(cos : cosZ ) R(cos t cos t) 1 (1 -cos2:) 4 ' dS d : d : dt 二 R sin : 1 2sin2: 1 4 」 -Rsin : 1 si n2 = R si n t 1 R 2 l^sinZt 2 L dV dV d : a = dt d : dt
、曲轴扭矩理论计算 对曲柄滑块机构做受力分析,在任一时刻滑块、压杆受力情况如下图所示 对滑块做力平衡分析有 曲柄处转矩为 M 1 - P AB m 1 其中力臂 mi = Rsin : 又 sinG = sin : cos : cos : sin (sin sin 2 ) 2 2 . 2 . =sin : " - sin : sin : cos : P AB = P COS 所以得M , P AB R S Z ) (1 11
曲柄滑块机构的运动分析及应用精编W O R D 版 IBM system office room 【A0816H-A0912AAAHH-GX8Q8-GNTHHJ8】
机械原理课程机构设计 实验报告 题目:曲柄滑块机构的运动分析及应用 小组成员与学号:刘泽陆(11071182) 陈柯宇 (11071177) 熊宇飞(11071174) 张保开 (11071183) 班级: 110717 2013年6月10日 摘要 (3) 曲柄滑块机构简介 (4) 曲柄滑块机构定义 (4) 曲柄滑块机构的特性及应用 (4) 曲柄滑块机构的分类 (8) 偏心轮机构简介 (9) 曲柄滑块的动力学特性 (10)
曲柄滑块的运动学特性 (11) 曲柄滑块机构运行中的振动与平衡 (14) 参考文献 (15) 组员分工 (15) 摘要 本文着重介绍了曲柄滑块机构的结构,分类,用途,并进行了曲柄滑块机构的动力学和运动学分析,曲柄滑块机构的运动学特性分析,得出了机构压力表达式,曲柄滑块机构的运动特性分析,得出了滑块的位移、速度和加速度的运动表达式。最后,对曲柄滑块机构运动中振动、平衡稳定性等进行了总结。 关键字:曲柄滑块动力与运动分析振动与平稳性 ABSTRACT The paper describes the composition of planar linkage, focusing on the structure, classification, use of a slider-crank mechanism and making the dynamic and kinematic analysis, kinematics characteristics of the crank slider mechanism analysis for a slider-crank mechanism, on one hand , we obtain the drive pressure of the slider-crank mechanism ,on the other hand,we obtain the expression of displacement, velocity and acceleration of movement. Finally, the movement of the vibration and balance stability of the crank slider mechanism are summarized.
一.判断题(认为正确的,在括号内画√,反之画X) 1.根据铰链四杆机构各杆长度,即可判断其类型。()2.四杆机构中,传动角越大,机构的传力性能越好。()3.极位夹角是反映机构力学性能的参数。()4.曲柄为主动件的摆动倒杆机构一定具有急回特性。()5.曲柄为主动件的曲柄滑块机构一定具有急回特性。()6.曲柄为主动件的曲柄摇杆机构一定具有急回特性。()7.曲柄为主动件的曲柄摇杆机构,其最小传动角的位置在曲柄与连杆共线的两位置之一() 8.曲柄为主动件的曲柄滑块机构,其最小传动角的位置在曲柄与导路垂直的位置。() 9.四杆机构有无止点位置,与何构件为主动件无关。()10.极位夹角是从动件两极限位置之间的夹角。()二.选择题(将正确的答案的序号字母填入括号内) 1.曲柄滑块机构有止点时,其主动件为何构件?()A.曲柄B.滑块C.曲柄滑块均可 2.四杆长度不等的双曲柄机构,若主动曲柄作连续匀速转动,则从动曲柄怎样运动?()A.匀速转动B.间歇转动C.变速转动 3.杆长不等的铰链四杆机构,若以最短杆为机架,则是什麽机构?() A.双曲柄机构 B. 双摇杆机构 C.双曲柄机构或双摇杆机构 4.一对心曲柄滑块机构,曲柄长度为100mm,则滑块的行程是多少?() A.50mm B.100mm C. 200mm 5.有急回特性的平面连杆机构的行程速比系数K是什麽值? A.K=1 B.K>1 C.K>0 6.对心曲柄滑块机构的曲柄为主动件时,机构有无急回特性和止点位置? ( ) A.有急回特性,无止点位置 B.无急回特性,无止点位置 C.有急回特性,有止点位置 7.铰链四杆机构ABCD各杆长分别为L ab=40mm,L bc=90mm,L cd=55mm,L ad=100mm,若取AB为机架,则为何机架?() A.双摇杆机构 B.曲柄摇杆机构 C.双曲柄机构 8.当曲柄为主动件时,下述哪种机构具有急回特性?() A.平行双曲柄机构 B.对心曲柄滑块机构 C.摆动导杆机构 三.设计计算题 1.一铰链四杆机构,已知L bc=50mm,L cd=35mm,L ad=30mm,ad杆为机架,试分析: 1)若此机构为曲柄摇杆机构时,L ab的取值范围。 2)若此机构为双曲柄机构时,L ab的取值范围。 3)若此机构为双曲柄机构时,L ab的取值范围。 2.已知,图3-42所示各四杆机构,1为主动件,3为从动件 1)作各机构的极限位置,并量出从动件的行程S或摆角ψ. 2)计算各机构行程速比系数k. 3) 作出个机构出现最小传动角γmin(或最大压力角αmax)时的位置图,并量出其大小。 3. 若上题各四杆机构中,构件3为主动件,构件1位从动件,试做各机构的止点位置。 4.图3-43所示为用四杆机构控制的加热炉炉门的启闭机构。工作要求,加热时炉门能
曲柄滑块机构的定义 曲柄滑块机构是铰链四杆机构的演化形式,由若干刚性构件用低副(回转副、移动副)联接而成的一种机构。是由曲柄(或曲轴、偏心轮)、连杆滑块通过移动副和转动副组成的机构。 曲柄滑块的特点及应用 常用于将曲柄的回转运动变换为滑块的往复直线运动;或者将滑块的往复直线运动转换为曲柄的回转运动。对曲柄滑块机构进行运动特性分析是当已知各构件尺寸参数、位置参数和原动件运动规律时,研究机构其余构件上各点的轨迹、位移、速度、加速度等,从而评价机构是否满足工作性能要求,机构是否发生运动干涉等。曲柄滑块机构具有运动副为低副,各元件间为面接触,构成低副两元件的几何形状比较简单,加工方便,易于得到较高的制造精度等优点,因而在包括煤矿机械在内的各类机械中得到了广泛的应用,如自动送料机构、冲床、内燃机空气压缩机等。 优点: 1.面接触低副,压强小,便于润滑,磨损轻,寿命长,传递动力大; 2.低副易于加工,可获得较高精度,成本低; 3.杆可较长,可用作实现远距离的操纵控制; 4.可利用连杆实现较复杂的运动规律和运动轨迹。 缺点: 1.低副中存在间隙,精度低; 2.不容易实现精确复杂的运动规律。 凸轮滑块机构的定义 凸轮机构是由凸轮,从动件和机架三个基本构件组成高副结构。凸轮是一个具有曲线轮廓或凹槽的构件,一般为主动件,作等速回转运动或往复直线运动。 与凸轮轮廓接触,并传递动力和实现预定的运动规律的构件,一般做往复直线运动或摆动,称为从动件。
凸轮滑块的特点及应用 .优点: 1.能够实现精确的运动规律; 2.设计较简单。 缺点:1.承载能力低,行程短; 2.凸轮轮廓加工困难。 丝杠螺母机构的定义 丝杠螺母机构又称螺旋传动机构。它主要用来将旋转运动变换为直线运动或将直线运动变换为旋转运动。有以传递能量为主的(如螺旋压力机、千斤顶等);也有以传递运动为主的如机床工作台的进给丝杠);还有调整零件之问相对位置的螺旋传动机构等。 丝杠螺母的特点及应用 优点: 1.结构简单,支撑稳定。 2.制动装置由于滚珠丝杠副的传动效率高,又无自锁能力。 缺点: 1.传动形式需要限制螺母的转动,故需导向装置 2.但其轴向尺寸不宜太长,否则刚性较差。因此只适用于行程较小的场合。 齿轮 齿轮齿条机构的定义 齿轮齿条传动是将齿轮的回转运动转变为往复直线运动,或将齿条的往复直线运动转变为齿轮的回转运动。
《系统仿真与matlab》综合试题 题目:曲柄滑块机构的运动学仿真 编号:______________ 21 _____________ 难度系数:___________________________ 姓名______________________ 班级_________________ 学号__________________ 联系方式______________ 成绩________________________________
《系统仿真与matlab 》综合试题 (1) 一、引言........................................................ 3. 二、运动学分析 (3) 1、实例题目 (3) 2、运动分析 (3) 三、M ATLAB程序编写 (5) 四、使用指南和实例仿真 (8) 五、结语 10
亠、引言 曲柄滑块机构是指用曲柄和滑块来实现转动和移动相互转换的平面连杆机构,也称曲柄连杆机构。曲柄滑块机构广泛应用于往复活塞式发动机、压缩机、冲床等的主机构中,把往复移动转换为不整周或整周的回转运动;压缩机、冲床以曲柄为主动件,把整周转动转换为往复移动。这里使用运动学知识,对其运动进行解析,并用MATL AE为其设计仿真模块。 1、运动学分析 1、实例题目 对图示单缸四冲程发动机中常见的曲柄滑块机构进行运动学仿真。已知连杆长度:D 0.1m , r3 0.4m,连杆的转速:2 2 , 3 3 , 设曲柄r2以匀速旋转,2 50r/s。初始条件:2 3 0。仿真以2为 输入,计算3和A,仿真时间0.5 s。 2、运动分析 建立封闭矢量方程: r2+r3=r1 (9)
第二章平面连杆机构及其设计与分析 §2-1 概述 平面连杆机构<全低副机构):若干刚性构件由平面低副联结而成的机构。 优点: (1)低副,面接触,压强小,磨损少。 (2)结构简单,易加工制造。 (3)运动多样性,应用广泛。 曲柄滑块机构:转动-移动 曲柄摇杆机构:转动-摆动 双曲柄机构:转动-转动 双摇杆机构:摆动-摆动 (4)杆状构件可延伸到较远的地方工作<机械手) (5)能起增力作用<压力机) 缺点: <1)主动件匀速,从动件速度变化大,加速度大,惯性力大,运动副动反力增加,机械振动,宜于低速。 <2)在某些条件下,设计困难。 §2-2平面连杆机构的基本结构与分类 一、平面连杆机构的基本运动学结构 铰链四杆机构的基本结构 1.铰链四杆机构 所有运动副全为回转副的四杆机构。 BC-连杆 AB、CD-连架杆 连架杆:整周回转-曲柄 往复摆动-摇杆 2.三种基本型式
(1)曲柄摇杆机构 定义:两连架杆一为曲柄,另一为摇杆的铰链四杆机构。 特点:、 0~360°, 、<360° 应用:鳄式破碎机缝纫机踏板机构揉面机 (2)双曲柄机构 定义:两连架杆均作整周转动的铰链四杆机构。 由来:将曲柄摇杆机构中曲柄固定为机架而得。 应用特例:双平行四边形机构 本篇再考察一道曲柄滑块机构的设计。同样是给定行程速比系数来确定杆长。 设计一偏置曲柄滑块机构,已知滑块的行程速比系数为1.5,滑块的行程50 ,导路的偏距20 ,求曲柄和连杆长度,并求其最大压力角。 问题分析 首先设计机构,然后再求最大压力角。 机构的设计。先计算出行程速比系数如下 那么根据题意,最后的结果应当如下图。滑块的两个极位之间距离是50mm,而固定铰链A 在与CD平行20mm的直线上,而且A点到C,D的夹角是36度。 图解总是从已知条件开始,然后逐步确定未知因素。本问题中知道三个数字:50mm,20mm,36度。而这个36度时与DC的距离相关的,所以图解时先画出滑块的两个极限位置,然后确定铰链A所在的水平线,接着就是根据36度这个条件最终确定A的位置。 (1)确定滑块的极位及固定铰链A所在的直线 先绘制水平线段C2C1,使得其距离为50mm. 然后在其上方20mm的地方绘制一条水平直线I.那么铰链A就应该在这条直线上。(2)根据极位夹角确定铰链A所在的圆 下面要根据极位夹角来确定A所在的曲线,这样,该曲线与上述曲线相交就可以唯一确定A点的位置。 A点到C1,C2形成的夹角是36度。那么所有与C1,C2形成夹角为36度的点有什么特征呢?---圆周角具有这种特征。 从几何知道,在一个圆上面,对应于同一个圆弧的圆周角都相等。基于这一点,过C2做直线垂直于C2C1,而作射线C1E与C2C1夹角为90-36=54度,二者交于点E,则C2EC1这个角度就是36度。 现在以C1E为直径做一个圆,则在该圆上任意取一点,该点与C2C1连线的夹角就都是36度,从而A点必然在该圆上面。 根据上述规则做出的上图发现,该圆与水平线I并不相交。这意味着作图有问题。实际上,刚才作的C1E在C2C1之下,所以导致不相交。因此改变策略,在C2C1之上作C1E,使得它与C2C1的夹角为54度。 然后以C1E为直径作出一个圆。该圆与直线I有两个交点:A1和A2。这样,该问题有两组解。但是观察下图可以发现,取A1或者A2,实际上结果是一样的,只是关于C2C1的中垂线对称而已。所以这里只取A1这个点,它就是固定铰支座A。 (3)测量曲柄和连杆的尺寸 量取A1C1,A1C2如下图。 则可以推知曲柄和连杆的长度 到此为止,连杆机构设计完毕。 (4)得到最大的压力角 从图中可以发现,当滑块在最左边时,有最大的压力角(滑块受到的推力与滑块速度方向的夹角),测量得到角度为53度。 至此,该曲柄滑块机构的设计和分析结束。 ****** 曲柄滑块机构的运动学分析 *******' SC=input(' 输入滑块行程的均值(mm) SC = '); P=input(' 输入曲柄轴心至滑销最远距离(mm) P = '); E=input(' 输入机构偏心距的均值(mm) E = '); RL=input(' 输入曲柄与连杆长度比的均值 RL = '); DR=input(' 输入曲柄长度偏差(mm) DR = '); DL=input(' 输入连杆长度偏差(mm) DL = '); DE=input(' 输入机构偏心距偏差(mm) DE = '); N=input(' 输入曲柄转速(r/min) N = '); L=sqrt((P-SC)^2-E^2)/(1-RL); fprintf(1,' 连杆长度的均值(mm) L = %3.6f \n',L) R=RL*L; fprintf(1,' 曲柄长度的均值(mm) R = %3.6f \n',R) CR=DR/3;CL=DL/3;CE=DE/3; EL=E/L; fprintf(1,' 偏心距与连杆长度比的均值(mm) EL = %3.6f \n',EL) fprintf(1,' 曲柄长度的标准离差(mm) CR = %3.6f \n',CR) fprintf(1,' 连杆长度的标准离差(mm) CR = %3.6f \n',CL) fprintf(1,' 偏心距的标准离差(mm) CE = %3.6f \n',CE) W=pi*N/30; fprintf(1,' 曲柄的角速度(mm) W = %3.6f \n',W) CRL=sqrt((R*CL)^2+(L*CR)^2)/L^2; fprintf(1,' 曲柄与连杆长度比的标准离差 CRL = %3.6f \n',CRL) CEL=sqrt((E*CL)^2+(L*CE)^2)/L^2; fprintf(1,' 偏心距与连杆长度比的标准离差 CEL = %3.6f \n',CEL) theta=0:10:360; hd=theta.*pi/180; % 计算滑块位移、速度、加速度的均值 S=R.*(1-cos(hd)-EL.*sin(hd)+0.5.*RL.*sin(hd).^2); V=R.*W.*(sin(hd)-EL.*cos(hd)+0.5.*RL.*sin(2.*hd)); A=R.*W^2.*(cos(hd)+EL.*sin(hd)+RL.*cos(2.*hd)); figure(1); subplot(1,3,1); plot(theta,S,'r') title('\bf \mus 线图') m a t l a b曲柄连杆机构 分析 clear;clc; n=750;l=0.975;R=0.0381;h=0.2;omiga=n.*pi/30;tmax=2.*pi/omiga; t=0:0.001:tmax; %计算曲柄转一圈的总t值 alpha1=atan((h+R.*sin(omiga.*t))./sqrt(l.*l-(h+R.*sin(omiga.*t))))+pi; alpha1p=-(R.*omiga.*cos(omiga.*t))./(l.*cos(alpha1)); vb=-R.*omiga.*sin(omiga.*t)+R.*omiga.*cos(omiga.*t).*tan(alpha1); ab=-R.*omiga.^2.*cos(omiga.*t)- (R.*omiga.*cos(omiga.*t)).^2./(l.*(cos(alpha1)).^3) -R.*omiga.^2.*sin(omiga.*t).*tan(alpha1); subplot(1,2,1);plot(t,vb);title('曲柄滑块机构的滑块v-t图'); xlabel('时间t(曲柄旋转一周)');ylabel('滑块速度v');grid on; subplot(1,2,2);plot(t,ab);title('曲柄滑块机构的滑块a-t图'); xlabel('时间t(曲柄旋转一周)');ylabel('滑块加速度a');grid on; %下面黄金分割法求滑块的速度与加速度最大值 epsilon=input('根据曲线初始区间已确定,请输入计算精度epsilon(如输入 0.001):'); a=0;b=0.04; %初始区间 n1=0; %n1用于计算次数 a1=b-0.618*(b-a);y1=-R.*omiga.*sin(omiga.*a1) +R.*omiga.*cos(omiga.*a1).*tan(alpha1); a2=a+0.618*(b-a);y2=-R.*omiga.*sin(omiga.*a2) +R.*omiga.*cos(omiga.*a2).*tan(alpha1); while abs(a-b)>=epsilon if y1<=y2曲柄滑块机构设计
曲柄滑块机构的运动学分析
matlab曲柄连杆机构分析讲课讲稿
相关主题
文本预览